三相异步电动机调速系统设计(精)
(完整版)异步电动机变频调速系统..
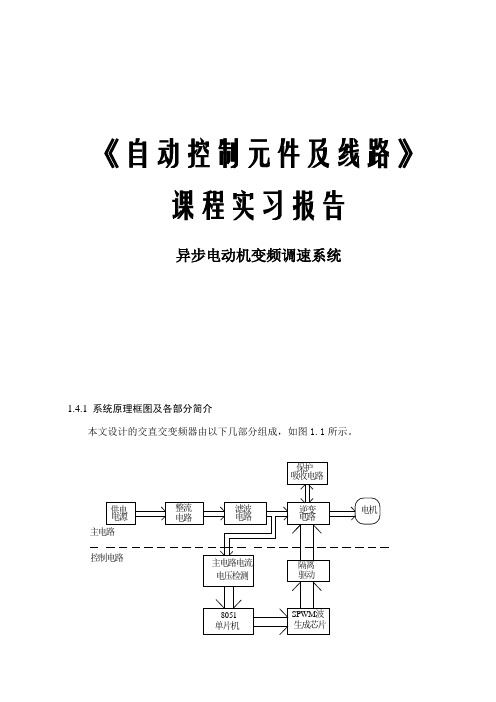
《自动控制元件及线路》课程实习报告异步电动机变频调速系统1.4.1 系统原理框图及各部分简介本文设计的交直交变频器由以下几部分组成,如图1.1所示。
图1.1 系统原理框图系统各组成部分简介:供电电源:电源部分因变频器输出功率的大小不同而异,小功率的多用单相220V,中大功率的采用三相380V电源。
因为本设计中采用中等容量的电动机,所以采用三相380V电源。
整流电路:整流部分将交流电变为脉动的直流电,必须加以滤波。
在本设计中采用三相不可控整流。
它可以使电网的功率因数接近1。
滤波电路:因在本设计中采用电压型变频器,所以采用电容滤波,中间的电容除了起滤波作用外,还在整流电路与逆变电路间起到去耦作用,消除干扰。
逆变电路:逆变部分将直流电逆变成我们需要的交流电。
在设计中采用三相桥逆变,开关器件选用全控型开关管IGBT。
电流电压检测:一般在中间直流端采集信号,作为过压,欠压,过流保护信号。
控制电路:采用8051单片机和SPWM波生成芯片SA4828,控制电路的主要功能是接受各种设定信息和指令,根据这些指令和设定信息形成驱动逆变器工作的信号。
这些信号经过光电隔离后去驱动开关管的关断。
1.4.2 变频器主电路方案的选定变频器最早的形式是用旋转发电机组作为可变频率电源,供给交流电动机。
随着电力半导体器件的发展,静止式的变频电源成为了变频器的主要形式。
静止式变频器从变换环节分为两大类:交-直-交变频器和交-交变频器。
1.交-交型变频器:它的功能是把一种频率的交流电直接变换成另一种频率可调电压的交流电(转换前后的相数相同),又称直接式变频器。
由于中间不经过直流环节,不需换流,故效率很高。
因而多用于低速大功率系统中,如回转窑、轧钢机等。
但这种控制方式决定了最高输出频率只能达到电源频率的1/3~1/2,所以不能高速运行。
2.交-直-交型变频器:交-直-交变频器是先把工频交流通过整流器变成直流,然后再直流变换成频率电压可调的交流,又称间接变频器,交-直-交变频器是目前广泛应用的通用变频器。
三相异步电动机的调速习题(精)
11.2 三相异步电动机的调速
一、填空题
1、异步电动机的调速方法有 、 和 三种。
2、一台带恒定负载转矩的绕线式异步电动机,当转子回路串入电阻增大时,则电机转速 。
3、三相异步电动机采用变频调速时,为保持主磁通1Φ不变,则在变频的同时改变__________。
二、选择题
1、 异步电动机负载转矩不变的情况下调速,当转速下降时,电动机输出功率会( )。
(A )增大 (B )减少 (C )不变
2、 一台两极绕线式异步电动机要把转速调上去(大于额定转速),则( )调速可行。
(A )变极 (B )转子回路串电阻 (C )变频
3、三相异步电动机采用变极调速时,若把极对数2=p 变为1=p ,则电动机的同步转速将( )。
(A )增加1倍 (B )减小1半 (C )不变
三、问答题
1、鼠笼式电动机和绕线式电动机各有哪些调速方法?各调速方法有何特点?
2、变频调速中,当变频器输出频率从额定频率降低时,起输出电压应如何变化?为什么?
四、计算题
1、一台三相4极绕线转子异步电动机,频率Hz f 501=,额定转速min /1485r n N =。
已知转子每相电阻Ω=02.02r ,若电源电压和频率不变,电机的电磁转矩不变,那么需要在转子每相串接多大的电阻,才能是转速降至min /1050r ?。
双闭环三相异步电动机调压调速的系统设计与仿真课程设计模板
第1章绪论1.1 双闭环三相异步电动机调压调速系统旳原理和构成调压调速即通过调整通入异步电动机旳三相交流电压大小来调整转子转速旳措施。
理论根据来自异步电动机旳机械特性方程式:其中,p为电机旳极对数;w1为定子电源角速度;U1为定子电源相电压;R2’为折算到定子侧旳每相转子电阻;R1为每相定子电阻;L11为每相定子漏感;L12为折算到定子侧旳每相转子漏感;S为转差率。
图1-1 异步电动机在不一样电压旳机械特性由电机原理可知,当转差率s基本保持不变时,电动机旳电磁转矩与定子电压旳平方成正比。
因此,变化定子电压就可以得到不一样旳人为机械特性,从而到达调整电动机转速旳目旳1.2 双闭环三相异步电动机调压调速系统旳工作原理系统主电路采用3个双向晶闸管,具有体积小。
控制极接线简朴等长处。
A.B.C为交流输入端,A 3.B3.C3为输出端,接向异步电动机定子绕组。
为了保护晶闸管,在晶闸管两端接有阻容器吸取装置和压敏电阻。
控制电路速度给定指令电位器BP1所给出旳电压,经运算放大器N构成旳速度调整器送入移相触发电路。
同步,N还可以得到来自测速发电机旳速度负反馈信号或来自电动机端电压旳电压反馈信号,以构成闭环系统,提高调速系统旳性能。
移相触发电路双向晶闸管有4种触发方式。
本系统采用负脉冲触发,即不管电源电压在正半周期还是负半周期,触发电路都输出负得触发脉冲。
负脉冲触发所需要旳门极电压和电流较小,故轻易保证足够大旳触发功率,且触发电路简朴。
TS是同步变压器,为保证触发电路在电源正负半波时都能可靠触发,又有足够旳移相范围,TS采用DY11型接法。
移相触发电路采用锯齿波同步方式,可产生双脉冲并有强触发脉冲电源(+40V)经X31送到脉冲变压器旳一次侧第2章双闭环三相异步电动机调压调速系统旳设计方案2.1 主电路设计调压电路变化加在定子上旳电压是通过交流调压器实现旳。
目前广泛采用旳交流调压器由晶闸管等器件构成。
它是将三个双向晶闸管分别接到三相交流电源与三相定子绕组之间通过调整晶闸管导通角旳大小来调整加到定子绕组两端旳端电压。
三相异步电动机调速方法
三相异步电动机调速方法三相异步电动机是工业生产中常见的一种电动机,它具有结构简单、运行可靠、维护方便等优点,因此在各种机械设备中得到广泛应用。
在实际生产中,为了满足不同工艺要求和工作条件,常常需要对三相异步电动机进行调速。
下面将介绍几种常见的三相异步电动机调速方法。
首先,我们来介绍电压调制调速方法。
这是一种最为简单的调速方法,通过改变电动机的供电电压来实现调速。
当电动机的供电电压降低时,电动机的转速也会相应降低,反之亦然。
这种方法简单易行,成本低廉,但是调速范围有限,且效率不高。
其次,我们来介绍频率调制调速方法。
这种方法是通过改变电动机的供电频率来实现调速。
通常情况下,电动机的供电频率是恒定的,但是通过变频器等设备可以改变供电频率,从而实现调速。
这种方法调速范围广,效率高,但是设备成本较高。
另外,我们还可以采用极对数调速方法。
这是通过改变电动机的极对数来实现调速。
当电动机的极对数增加时,电动机的转速会相应降低,反之亦然。
这种方法调速范围广,效率高,但是需要更换电动机的定子绕组,成本较高。
除了以上几种常见的调速方法外,还有一些其他的调速方法,如机械变速调速方法、液压变速调速方法等。
这些方法各有特点,可以根据具体的工艺要求和工作条件选择合适的调速方法。
总的来说,三相异步电动机的调速方法有多种多样,可以根据具体的需求选择合适的调速方法。
在选择调速方法时,需要考虑调速范围、效率、成本等因素,并结合实际情况进行综合考虑。
希望本文介绍的内容能够为大家在实际生产中选择合适的调速方法提供一些参考,使生产过程更加顺利高效。
三相异步电动机的调速
m1 p U1 2 1 ( ) 常数 ' 4 f1 2 ( L1 L2 ) Te max的降低是由定子绕组电阻 r 的影响所致。尤其是当 f1 低到使得 r 由上式可见, 1 1 ( x1 x2 ) 相比较时, Te max下降严重。 可以与 Te max
解决措施: 可以对 U1 / f1的线性关系加以修正,提高低频时的 U1 / f1 ,以补偿 低频时定子绕组电阻压降的影响(见下图)。
TY 9550PY 9550PYY ( ) /( ) 1 TYY n1 2n1
结论:Y/YY接变极调速属于恒转矩调速方式。
第12章 三相异步电动机的调速
b、△/YY接变极调速
假定变极调速前后电机的功率因数 cos1 、效率 均不变,并设每半相绕组中的电 流均为额定值 I 1N ,则 /YY变极前后电动机的输出功率和输出转矩分别满足下列关系:
改变极对数p都是成倍的变化,转速也是成倍的变化,故为有级调速。 改变定子绕组的联结法改变绕组极对数的原理。 见下页图12-1,12-2
第12章 三相异步电动机的调速
三相异步电动机的转子转速可由下式给出:
60 f1 n (1 s) p
由上式可见,三相异步电动机的调速方法大致分为如下几种: 变极调速; 变频调速; 改变转差率调速; 其中,改变转差率的调速方法涉及: 改变定子电压的调压调速; 绕线式异步电动机的转子串电阻调速; 电磁离合器调速; 绕线式异步电动机的双馈调速与串级调速。
由此绘出保持U1 / f1=常数时变频调速的典型机械特性如下图所示。为便于比较,图 中还同时绘出了 Te max 常数时的机械特性,如图中的虚线所示。
三相异步电动机变频调速时 的机械特性( U1 / f1 =常数)
三相异步电动机变频调速系统设计开题报告

三相异步电动机变频调速系统设计开题报告开题报告一、课题背景与研究意义三相异步电动机是目前工业生产中最为常用的电动机之一,广泛应用于各个领域。
而变频调速系统是对电动机进行速度控制的主要手段之一,具有节能、精准控制、稳定性好等优点,因此在工业生产中被广泛采用。
本课题旨在设计一个三相异步电动机变频调速系统,实现对电动机的精确调速,提高工业生产的效率。
二、研究内容与目标1.研究三相异步电动机的基本原理和调速方法。
2.研究变频器的工作原理和调速控制策略。
3.设计一个三相异步电动机变频调速系统,实现对电动机的精确控制和调速。
4.验证设计系统的性能和效果,分析并总结系统的优缺点。
三、研究方法与步骤1.查阅相关文献,了解三相异步电动机的基本原理和调速方法,以及变频器的工作原理和调速控制策略。
2.设计系统的硬件结构,包括电路设计和电路元件的选择。
3.设计系统的软件控制部分,包括调速算法的设计和程序编写。
4.搭建实验平台,进行系统的调试和测试。
5.对设计系统的性能和效果进行评估和分析。
四、预期结果与进展计划本课题的预期结果是设计一个能够实现对三相异步电动机精确调速的变频调速系统,并验证其性能和效果。
具体进展计划如下:1.第一周:查阅相关文献,了解三相异步电动机和变频调速系统的基本原理。
2.第二周:设计系统的硬件结构,包括电路设计和元件的选择。
3.第三周:设计系统的软件控制部分,包括调速算法的设计和程序编写。
4.第四周:搭建实验平台,进行系统的调试和测试。
5.第五周:对设计系统的性能和效果进行评估和分析。
6.第六周:撰写开题报告。
五、存在的问题与挑战1.三相异步电动机和变频调速系统的原理较为复杂,需要深入研究和理解。
2.系统的硬件设计和软件控制部分需要充分考虑系统的可靠性和稳定性。
3.实验平台的搭建和测试需要耗费较多的时间和精力。
六、研究计划1.学习并掌握三相异步电动机和变频调速系统的基本原理。
2.设计并搭建实验平台,完成系统的调试和测试。
完整版《三相异步电动机变频调速系统设计》

完整版《三相异步电动机变频调速系统设计》
一、异步电动机变频调速系统简介
异步电动机变频调速系统是一种基于变频器技术完成频率控制的调速系统,其结构组成主要包括:异步电动机、变频器、控制器和传动机构等组成。
本系统可以实现对电动机的输出功率、转速和负载的关系,从而提高机器的能源利用率,减少电机输出的能耗。
二、异步电动机变频调速系统组成
1.异步电动机:异步电动机是一种由能量变换设备的机械部分,它通过电能激励的电磁作用而可发生转动,其结构由定子、转子及密封装置等组成。
该部件能够接受输入的直流电压,完成外界功率转换。
2.变频器:变频器是由变频技术控制异步电动机输出电压和频率的装置,其特性是能够将低电压变高,将低频率调整到高频率,使输出电压与频率可以随着被控制设备的运行状况而灵活变化,能有效节省电源能耗,减少设备故障。
3.控制器:控制器是负责控制变频器给异步电动机提供指令的,它的功能有:对异步电动机的转矩与频率进行控制;实现变频器与异步电动机的细微调整;实现较快速度的反应。
三相异步电机的调速
一.基频以下变频调速 A),保持 为常数
上式对s求导,即 有最大转矩和临界转差率为
一.基频以下变频调速 B),保持 为常数 为防止磁路的饱和,当降低定子电源频率时,保持 为常数,使气 隙每极磁通 为常数,应使电压和频率按比例的配合调节。这时,电动 机的电磁转矩为 上式对s求导,即 有最大转矩和临界转差率为
当某一瞬间电势的极性 与 或同相时,有转子回路电流为
反相
式中“–”号表示 与 反相,“+”号表示 与 同相。异步电动机的电磁 转矩为
当电动机定子电压及负载转矩都保持不变时,转子电流可看成常数;同时考虑到电 动机正常运行时s很小,sx2《 r2 忽略sx2 则: 在负载转矩 一定的条件下,若 转子串入 与 反相,则
变频调速原理及其机械特性
改变异步电动机定子绕组供电电源的频率 ,可以改变同步 转速n 1 ,从而改变转速。如果频率 连续可调,则可平滑的调 节转速,此为变频调速原理。
三相异步电动机运行时,忽略定子阻抗压降时,定子每相电 压为 如果降低频率 ,且保持定子电源电压 不变,则气隙每 极磁通 将增大,会引起电动机铁芯磁路饱和,从而导致过大 的励磁电流,严重时会因绕组过热而损坏电机,这是不允许的。 因此,降低电源频率 时,必须同时降低电源电压 ,以达到控 制磁通 的目的。对此,需要考虑基频(额定频率)以下的调 速和基频以上调速两种情况
三相异步电动机的调速
根据三相异步电动机的转速公式为
通过上式可知,改变交流电机转速的方 法有三种 1.变转差率调速:改变s实现调速; 2.变极调速:改变p来实现调速 3.变频调速:改变f1实现调速
三相异步电动机的调速
改变转差率的方法很多,常用的方案有改变异步电动机的定子 电压调速,采用电磁转差(或滑差)离合器调速,转子回路串电 阻调速以及串极调速。前两种方法适用于鼠笼式异步电动机,后 者适合于绕线式异步电动机。这些方案都能使异步电动机实现平 滑调速,但共同的缺点是在调速过程中存在转差损耗,即在调节 过程中转子绕组均产生大量的钢损耗( )(又称转差功 率),使转子发热,系统效率降低;主要存在调速范围窄、效率低, 对电网污染较大,不能满足交流调速应用的广泛需求; 改变电机的极数的调速,无法实现连续调速,并且接线麻烦, 应用的场合少;但价格便宜; 改变频率进行调速是最理想的,但这个梦想经历了百年之久, 直至20世纪70年代,大功率晶体管(GTR)的开发成功,才实现 变频调速,随着电子技术和计算机技术的日益发展变频调速技术 日益成熟,应用得越来越广泛了
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Anhui Vocactional & Technical College of Industry & Trade毕业论文三相异步电动机调速系统设计Three-phase asynchronous motor drive system design所在系院:电气与信息工程系专业班级:、机电一体技术学生学号:43学生姓名:叶海英指导教师:王琳;2013年3月23日安徽工贸职业技术学院毕业设计(论文)任务书系(院)专业班级学生姓名学号一、题目:二、内容与要求:》三、设计(论文)起止日期:任务下达日期:年月日完成日期:年月日指导教师签名:年月日四、教研室审查意见:教研室负责人签名:年月日~摘要本文所讨论的是三相异步电动机的串级调速的基本原理与实现方法。
对于一般交流电动机的调速,我们都是从电动机的定子侧引入控制变量(改变定子供电电压、频率)来实现的,这对于转子处于短路状态的三相笼型异步电动机是唯一的途径。
但是,对于绕线式异步电动机来说,其转子绕组能够通过变量以实现调速。
绕线式异步电动机转子侧的控制变量有电流、电动势、电阻等。
通常转子电流随负载的大小决定,不能任意调节;而转子回路阻抗的调节属于耗能型调速,缺点较多,所以转子侧的控制变量只能是电动势。
在发挥绕线式异步电动机转子的可控性优势的基础上,提高调速性能需要从两方面着手:1从节能角度考虑,应将损耗在转子附加电阻上的能量吸收,转化成别的有用的能量或反馈到电网,以提高传动系统的效率2从高性能调速要求考虑,应用控制理论,将其组成闭环调速控制系统,满足调速精度、动态响应等指标的要求。
综合所述,利用串级调速系统,是使绕线式异步电动机实现高性能调速的有效办法。
用转子串反电动势来代替电阻,吸收转差功率;用双闭环控制提高系统的静、动态性能。
把这种用附加电动势的方法将转差功率回收利用的调速称为双闭环串级调速。
【关键字】节能,双闭环,调速,变极AbstractThis paper discusses the three-phase induction motor cascade speed control principle and Realization method. For the general AC motor speed, we are all from the motor stator side of the introduction of the control variable ( a change in the stator voltage, frequency to achieve, therotor in a short-circuit state AC squirrel cage rotor asynchronous motor is the only way. However, for winding type asynchronous motor, due toits rotor winding through the variables to achieve the speed. The rotor side of the control variables are the current, electromotive force, resistance. Usually the rotor current with load determines the size, cannot be adjusted; and the rotor loop impedance regulator belonging to the energy dissipation type adjustable speed, a lot of problems, so the rotor side control variables can only be electromotive force. In theplay of wound-rotor asynchronous motor control on the foundation of the advantage, improve speed performance to need from two aspects:1 from the energy point of view, should be the loss in rotor ofadditional resistance on energy absorption, energy or converted into other useful feedback to the grid, to enhance the transmissionefficiency of the system2 from the high performance speed requirements are taken into account, the application of control theory, the closed loop speed control system composition, meet the accuracy of speed, dynamic response requirement.《Above all, use of cascade speed regulation system, is to make thewinding type asynchronous motor speed and effective measures to realize high performance. With rotor EMF to replace resistor, absorb slip power; double closed-loop control system can improve the static, dynamic performance. This additional electromotive force method will slip power recovery speed is known as a double closed loop cascade speed control.【eywords 】Energy saving, Double closed-loop, Speed control, Variable pole目录摘要 1Abstract 2第1章三相异步电动机的工作原理及结构 4三相异步电动机工作原理 4工作原理 5[第2章三相异步电动机调速概述 7调速概念 7调速方法 7调速范围 11动态速降 11恢复时间 11第3章串级调速的基本原理及线路 11串级调速的基本原理 11:串极调速基本类型 11串极调速系统的启动方式 14结论 17致谢 18参考文献 19第一章三相异步电动机的工作原理及结构三相异步电动机的结构}三相异步电动机主要就是由定子和转子两部分组成。
(如图1-1所示)。
定子主要由定子铁芯,定子绕组,机座,端盖等组成。
转子主要由转轴,转子铁芯,和转子绕组组成。
(按照转子绕组的结构形式,转子可分为绕线式转子和鼠笼式转子)。
图1-1 三相异步电动机的结构(1)定子铁心:通常由~厚表面涂有绝缘漆的薄硅钢片叠压而成,减少了由于交变磁通通过而引起的铁心涡流损耗。
铁心内圆有均匀分布的槽口,用来嵌放定子绕圈;(2)定子绕组:是三相电动机的电路部分,三相电动机有三相绕组,通入三相对称电流时,就会产生旋转磁场。
三相绕组由三个彼此独立的绕组组成,且每个绕组又由若干线圈连接而成。
每个绕组即为一相,每个绕组在空间相差120度电角度。
线圈由绝缘铜导线或绝缘铝导线绕制。
中、小型三相电动机多采用圆漆包线,大、中型三相电机的定子线圈则用较大截面的绝缘扁铜线或扁铝线绕制后,再按一定规律嵌入定子铁心槽内。
定子三相绕组的六个出线端都引至接线盒上,首端分别标为U1,V1,W1,末端分别标为U2,V2,W2。
这六个出线端在接线盒里的排列如图1-2 所示,可结成星形或三角形。
(3)转子铁心:也用厚的硅钢片叠压而成,套在转轴上,作用和定子铁心相同,一方面作为电动机磁路的一部分,一方面用来安放转子绕组。
,图1—2 电动机的接线法(4)转子绕组分为:笼型转子和绕线转子。
如图1-3所示。
图1—3 转子形式(5)机械部分:机座、端盖、轴和轴承等。
工作原理三相异步电动机的工作原理可以简述如下:当电动机的三相定子绕组(各相差120度电角度),通入三项交流电后,将产生一个旋转磁场,该旋转磁场切割转子绕组,从而在转子绕组中产生感应电流(转子绕组是闭合通路),载流的转子导体在定子旋转磁场作用下将产生电磁力,从而在电动机转轴上形成电磁转矩,驱动电动机旋转,并且电机旋转方向与旋转磁场方向相同。
这一工作过程可表示成下图1-4、1-5所示。
>图1—4 电动机的工作流程图1—5 电动机的工作原理示意图第二章三相异步电动机调速概述调速概念所谓调速即是用人为的方法来改变异步电动机的转速。
由三相异步电动机的调速转差率公式:`S=n1-n/n1得:n=n1(1-s=60f/p(1-sf是电源频率,p是磁极对数.调速方法由转速公式可见,改变供电频率f、电动机的磁极对数p及转差率s均可达到改变电动机转速的目的。
从调速的本质来看,不同的调速方式无非是改变交流电动机的同步转速或不改变同步转速两种。
在生产机械中广泛使用不改变同步转速的调速方法有:1、绕线式电动机的转子串电阻调速、斩波调速、串级调速\2、应用电磁转差离合器、液力偶合器、油膜离合器等调速。
3、改变同步转速的有改变定子极对数的多速电动机4、改变定子电压、频率的变频调速等。
从调速时的能耗观点来看,有高效调速方法与低效调速两种方法。
高效调速指时转差率不变,因此无转差损耗,如多速电动机、变频调速以及能将转差损耗回收的调速方法(如串级调速等)。
有转差损耗的调速方法属低效调速,如转子串电阻调速方法,能量就损耗在转子回路中;电磁离合器的调速方法,能量损耗在离合器线圈中;液力偶合器调速,能量损耗在液力偶合器的油中。
一般来说转差损耗随调速范围扩大而增加,如果调速范围不大,能量损耗是很小的。
、变极调速方法这种调速方法是用改变定子绕组的接线方式来改变笼型电动机定子极对数达到调速目的,如三角形联结和双星型联结,如图1—6:图1—61、具有较硬的机械特性,稳定性良好;2、无转差损耗,效率高;3、接线简单、控制方便、价格低;4、有级调速,级差较大,不能获得平滑调速;5可以与调压调速、电磁转差离合器配合使用,获得较高效率的平滑调速特性。