伺服作动器
伺服作动器
伺服作动系统技术特性(续): 4)额定速度 在额定状态下额定输入指令时的输出速度。结合系统频宽 和可能产生功率反传〔对于分离舵机)来综合考虑,同时 要有饱和速度的限制。 分辨率 5)分辨率 分辨率也称阈界,指从零位到引起可测输出变化的最小输 入指令值。通常要求为输入幅值的1%左右。具体由详细 规范来规定。 6)滞环 以最大输入指令的10%作为输入时,同一输出量的输出 特性上升和下降沿所对应的输入信号差值相对额定输入值 的百分比。其指标按详细规范来确定,一般为3%左右。
伺服作动系统功能: 飞控系统的伺服作动分系统,是用于控制飞机各气伺服作动器两种主要功能单 元所构成的一个 元所构成的 个闭环伺服控制系统。该系统执行来自飞行 控制计算机(控制律)的指令,并进行信号形式的转换(即 将电气信号转换为作动器的机械运动),用于驱动飞机气 动控制面(舵面)的偏转,从而实现飞行控制系统对飞机飞 行进行控制的目的。 具备对自身工作状态检测、故障处理及状态申报等能力。
伺服作动系统技术特性: 1、物理特性 1)重量 在满足性能要求的前提下重量尽可能小. 在满足性能要求的前提下重量尽可能小 2)结构尺寸 伺服作动器的结构尺寸符合飞机给定的空间尺寸。既要考 虑到总的技术性能要求又要顾及安装空间的限制。 3)安装 伺服作动器的安装要适合机上的要求. 伺服作动器的安装要适合机上的要求
机电作动系统的关键技术(续) ( )机械传 (3) 机械传动技术 术 EMA 机械部分包括电机转子、机械传动链、负载,构成 机械式低通滤波器。 EMA 机械传动链有3 种: (齿轮副)) 蜗轮-蜗杆、齿轮 蜗杆 齿轮-齿条、齿轮副 齿条 齿轮副-丝杠 电机单轴输出采用结构紧凑、传动比大、传动效率高、易 于实现零侧隙传动的谐波齿轮或行星齿轮减速器。 于实现零侧隙传动的谐波齿轮或行星齿轮减速器 EMA取代液压作动系统的优点是能够降低例行维护量 目前存在的主要问题:减速器侧隙和丝杠间隙引起的非线 性与闭环共振问题; 杠在动态大负载下损伤问题;以及 性与闭环共振问题;丝杠在动态大负载下损伤问题;以及 机械卡死、能量损耗和效率问题。
伺服驱动器快速入门指南

伺服驱动器快速入门指南伺服驱动器(Servo Drive)是一种用于控制伺服电机的电子设备。
它将来自控制器的信号转换为电机操作,在工业自动化等应用中提供精确的速度和位置控制。
本文将为您介绍伺服驱动器的基本工作原理、安装步骤和调试方法,以帮助您快速入门。
一、伺服驱动器的工作原理1.控制器接口:接收来自控制器的输入信号,例如位置指令、速度指令等。
2.功率电子器件:将控制信号转换为电机驱动信号,控制电机的运动。
3.反馈装置:获取电机运动的实际反馈信息,例如位置反馈或速度反馈。
1.控制器向伺服驱动器发送指令,例如位置指令。
2.伺服驱动器接收指令,并将其转换为电机运动的驱动信号。
3.电机根据驱动信号运动,并通过反馈装置将实际运动信息返回给伺服驱动器。
4.伺服驱动器通过比较反馈信息与指令信息,计算出误差,并根据PID控制算法调整驱动信号。
5.伺服驱动器不断重复上述过程,直到电机实现准确的位置、速度或力矩控制。
二、伺服驱动器的安装步骤1.选择合适的伺服驱动器:根据所需的控制精度、电机功率和接口要求等进行选择。
2.安装电机:将伺服驱动器与电机进行连接,确保连接牢固可靠。
3.连接电源:根据伺服驱动器的额定电源要求,将其连接到电源。
4.连接信号线:根据伺服驱动器的控制接口要求,将其与控制器进行连接,例如采用模拟输入信号或数字输入信号。
5.接地连接:将伺服驱动器的接地端连接到适当的接地点,以确保系统的稳定性和安全性。
6.检查安装:检查所有连接是否牢固,确保电气连接正确无误。
三、伺服驱动器的调试方法1.设定工作模式:根据实际需要,将伺服驱动器设定为位置控制模式、速度控制模式或力矩控制模式。
2.设定驱动参数:根据所控制电机的特性和应用需求,设置伺服驱动器的参数,例如电流限制、加速度和减速度等。
3.测试控制信号:通过控制器发送控制信号,观察伺服驱动器的响应情况,检查是否正常工作。
4.检查反馈信号:通过查看伺服驱动器的反馈信号,确认电机的实际运动情况与预期一致。
电液伺服作动器的生产技术

图片简介:本技术属于飞行控制领域,具体涉及一种电液伺服作动器。
在现有伺服作动器的基础上,增加模态转换组件和系统背压组件实现多模态的控制转换。
满足了基于飞机舵面作动架构的安全性需求。
技术要求1.一种电液伺服作动器,其特征在于,包括:进油单向阀(1)、电液伺服阀(2)、模态电磁阀(3)、模态转换阀(4)、作动筒线位移传感器(5)、液压作动筒(6)、两个抗气穴阀(9)、蓄能器(13)、回油背压阀(14),其中,两个抗气穴阀均为液压单向阀;回油背压阀是溢流阀,在固定的压力下打开提供油路背压;模态电磁阀(3)为两位三通电磁阀,通电时控制口与高压油接通,断电时控制口与回油接通;进油口通过管路与进油单向阀(1)进口连接,进油单向阀(1)出口通过管路与电液伺服阀(2)进油口连接,电液伺服阀(2)的回油口通过管路与回油背压阀的进口连接,回油背压阀出口通过管路与回油口连接,电液伺服阀(2)的两个负载口分别通过两条管路与模态转换阀(4)的两个进油口连接,模态转换阀(4)的第一负载口和第二负载口分别通过两条管路与液压作动筒(6)的第一油管嘴和第二油管嘴连接;模态电磁阀(3)进油口通过管路与进油单向阀(1)出口连接,模态电磁阀(3)回油口通过管路与回油背压阀进口连接,模态电磁阀(3)控制口通过管路与模态转换阀(4)液压控制口连接;液压作动筒(6)的第一油管嘴和第二油管嘴通过两条管路分别与两个抗气穴阀的出油口连接,两个个抗气穴阀的进油口通过管路与回油背压阀的进口连接;蓄能器(13)通过管路与回油背压阀的进口连接;作动筒线位移传感器(5)安装在液压作动筒(6)内部,作动筒线位移传感器(5)铁芯与作动筒活塞固连,作动筒线位移传感器(5)线圈与作动筒筒体固连固定。
2.根据权利要求1所述的作动器,其特征在于,还包括:压差作动筒线位移传感器(7)和压差作动筒(8),其中,液压作动筒(6)的第一油管嘴和第二油管嘴通过两条管路分别与压差作动筒(8)的两个油管嘴连接,压差作动筒线位移传感器(7)安装在压差作动筒(8)内部,压差作动筒线位移传感器(7)铁芯与压差作动筒(8)活塞固连,压差作动筒线位移传感器(7)线圈与压差作动筒(8)筒体固连固定。
250吨MTS高载荷伺服液压作动器技术参数

序号
设备名称
技术指标和功能要求
单位
数量
备注
1
250吨MTS高载荷伺服液压作动器(包含拟动力混合仿真培训,数据线70米及油管)
1、总体要求:要求新增加的250T作动器与现有的4站台4通道的结构加载系统能够完全兼容使用,保证系统的完整性。
2、原有系统部件产品编号说明:
(9)一套作动器提升吊环与安置地垫
(10)以上所提供的2500KN的高载荷电液伺服作动器需要在河南具有成熟的应用案例,必要时供应商可提供已有用户对该系统的使用评价。
(11)以上作动器部件在出厂前要预紧力连接,以保证运输不受到损坏。
6、液压动力系统
*(1)1个液压分油器
用于连接现有的液压子站和新增的2500KN高载荷作动器;同时提供250T作动器可以连接到现有液压子站的转换接头。
(2)虚拟仿真以及混合试验采用NEES推荐OpenFresco混合仿真构架,试验应用软件应具备与OpenFresco混合仿真构架的接口,可以完成非实时条件下的拟动力、拟静力混合仿真试验;
*(3)供应商应提供为期不少于一周的上述混合仿真试验培训,要求培训人员必须具有土木结构力学混合仿真的专业知识和丰富的培训经验,在国内培训过的以上混合试验方法的成功案例不少于5例。
5、作动器
一套2500kN重载电液伺服作动器总成,包含以下部分:
*(1)2500kN重载电液伺服作动器
拉力大于1750kN,压力大于:2500kN;
行程:750mm (+/-375mm);
作动器应能在21MPa的工作液压下正常工作,适用于静态及低频疲劳试验;
(2)作动器需采用低摩擦、非金属端盖轴承,以提供稳定的性能并减少磨损和咬死故障。
伺服作动器
(6)电动静液作动器保留传统液压作动系统很多优点,具有 和传统阀控作动系统一样的舵面接口,对现有系统的结构 改动量小,技术风险小,更受飞机制造者的偏爱。
动控制面(舵面)的偏转,从而实现飞行控制系统对飞机飞
行进行控制的目的。 具备对自身工作状态检测、故障处理及状态申报等能力。
典型伺服作动系统比较:
1、机电作动器EMA
机电作动系统:通过控制电动机或电器运行直接或间接 地控制负载运动,实现目标位置伺服控制的一类系统的 总称。 机电作动系统在飞机飞控中应用,极大提升飞机的可靠 性、可维修性和灵活性,减轻飞机重量及燃油消耗。相 较于维修费用高而又易受损伤的传统类型作动系统,其 安全性能和经济性能都有较大的优势。
机电作动系统的关键技术
(1)电机技术 考虑飞行器应用,随着电磁材料的发展和可靠性、可控 性的要求不断提高,飞行器中EMA 采用电动机主要有
感应电动机、永磁同步电动机、无刷直流电动机和开关 磁阻电动机,并日益倾向高速钐钴永磁无刷直流电动机。
目前,EMA 中除了采用多台电机构成余度外,还可以
采用高可靠性电机:电气多余度电机、机械多余度电机 和容错电机等,通过各种形式绕组备份来实现高可靠性。
气动、液压和电 动作动器综合性 能比较如表所示
气动作动系统结构:电气伺服马达、电磁阀、螺杆、轴承 和导杆等组成。
特点 : 电气伺服马达驱动电磁气动阀,控制活塞两侧气缸 内高压空气的进入与排出。
思考题: 1、伺服作动系统分类及其各自的特点?(EMA,EHA) 2、作动系统的频宽定义? 3、作动系统的分辨率是什么? 4、作动系统的动态刚度定义?
电液伺服作动器工作原理
电液伺服作动器工作原理你有没有想过,为什么一些机器能够精准地完成复杂的动作?比如,叉车那样的大型设备能够轻松搬运重物,或者是高精度的工程机械能在狭小空间里准确操作,甚至像飞机那样的飞行控制系统也能做到那么精确,令人咋舌。
答案其实都和一个不太显眼,但却非常强大的设备息息相关——电液伺服作动器。
它听起来有点高深,对吧?但其实它就是通过电和液压的“联手合作”,让机器动作灵活又精准。
咱们就来聊聊它是怎么一回事。
电液伺服作动器这名字,乍一听有点儿拗口,不是吗?不过,如果你把它拆开来看,就没那么复杂了。
电指的就是电力,液则代表液压,而伺服呢,就是“服务”的意思,指的是自动调整、控制的过程。
简单来说,这个装置就是通过电力来控制液体(通常是油)在系统中的流动,从而让机器部件完成精确的动作。
说白了,它就是“电”来控制“油”,然后“油”再推动机器动起来。
你知道吗,这种装置其实特别聪明。
它不像普通的电动机那样直接把电转化成机械能,它通过电信号来指挥液压系统,让油在管道里快速流动,产生强大的推力来驱动机械。
就好像是你在开车时踩油门,油门会传递信号给发动机,然后发动机就开始工作,推动车子前进。
不同的是,电液伺服作动器的“油门”特别精确,甚至能做到微小的调整,控制速度、位置,甚至是力量的变化,做到精密操作。
再说它的优势,哎呀,简直是“如虎添翼”!你想想,液压系统本身就具备很大的力量,结合了电控的精确调节,简直就是“扛得住,稳得住”。
就像是拳击手戴上了智能手套,力量和精度兼备,能在对抗中完美发力。
它的控制不仅非常灵敏,而且能在复杂的环境下稳定运行。
比如飞机、航天器、甚至是高端制造设备中,它们都需要这种精确、快速响应的动作来确保安全与效率。
任何微小的失误都可能带来不必要的损失或危险,而电液伺服作动器就是在这样的高压环境下,展现出它无与伦比的“功夫”。
你可能会想,它是怎么做到这么精确的呢?嗯,这就要说到它的“控制系统”了。
说白了,就是一个大脑,时时刻刻在观察和调整作动器的动作。
OMRON AC伺服电机 伺服驱动器 说明书

!
危
险
表示一个紧迫的危险情况,如不避免,会造成人员死亡或严重伤害。而且可能造成严重 的财产损失。 表示一个潜在的危险情况,如不避免,可能会造成人员死亡或严重伤害。而且可能造成 严重的财产损失。 表示一个潜在的危险情况,如不避免,可能导致轻度或中度的人身伤害或财产损失。
!
警
告
!
注
意
欧姆龙产品附注
所有欧姆龙产品在本手册中都用大写字母表示,当“单元”表示欧姆龙产品时,它也以大写字 母表示,不管它是否以产品的正式名称表示。 在某些显示中和某些欧姆龙产品上出现的缩写“Ch”往往指“字”,这个意义在文件中缩写为 “Wd”。 缩写“PLC”指的是可编程序控制器,不用作其他任何产品的缩写。
OMNUC W /
OMNUC W
R88M-W R88D-WT
I531-CN5-05
AC
AC
I531-CN5-05
I531-CN5-05
200609S01
注意:
欧姆龙产品是为合格的操作人员按照正常步骤使用,并只为本手册中所叙述的目的而制造的。 下列约定是用来指出本手册中的注意事项,并对其进行分类。务必注意它们所规定的情况。不 注意这些事项可能导致对人体的伤害或危及财产。
1-1 1-2 1-3 1-4 1-5 特点 ............................................................................................................................................................... 1-2 系统配置 ....................................................................................................................................................... 1-7 伺服驱动器术语 ........................................................................................................................................... 1-9 适用标准和型号 ......................................................................................................................................... 1-10 系统模块图 ................................................................................................................................................. 1-11
伺服作动器工作原理
伺服作动器工作原理
伺服作动器工作原理:伺服作动器是一种能够执行精确控制的电动驱动装置,它主要由一个电动机、减速器、编码器和控制器组成。
1. 电动机:伺服作动器采用直流电动机或交流电动机作为动力源,它能够将电能转换为机械能,提供驱动力。
2. 减速器:伺服作动器通常需要提供较大的转矩输出和较低的转速,因此在电动机和负载之间安装了一个减速器。
减速器可以减小电机转速,增大输出转矩,以满足应用的需求。
3. 编码器:编码器是伺服作动器的重要组成部分,它能够测量和反馈电动机的转矩、转速和位置信息。
编码器通常采用光电、磁性或光学技术,将运动信息转化为电信号,通过反馈系统传递给控制器。
4. 控制器:控制器是伺服作动器的核心部分,它接收来自编码器的反馈信号,并与预设的控制信号进行比较,计算出误差信号。
根据误差信号,控制器会调整驱动电机的输出力矩和转速,使其与预期的运动曲线相匹配。
控制器通常使用闭环控制系统,能够实现精确的位置、速度和力矩控制。
通过以上的组成部分和工作原理,伺服作动器能够实现高精度、高速度和高扭矩的运动控制,广泛应用于机械制造、自动化设备、机器人等领域。
基于PXI的电液伺服作动器控制系统的设计与实现
基于PXI的电液伺服作动器控制系统的设计与实现作者:胡志新等来源:《现代电子技术》2012年第01期摘要:针对某工程机械中的作动器装置,利用其液压系统的工作原理,设计了一种基于PXI的电液伺服作动器控制系统。
在介绍作动器液压回路工作原理的基础上,简述了控制系统的设计方案及其组成。
该设计解决了该作动器开环控制误差大的问题,具有控制精度高,灵敏度高,结构紧凑,可复用性高等优点。
关键词:电液伺服阀;伺服系统;作动器; PXI;中图分类号:TN911.7-34文献标识码:A文章编号:1004-373X(2012)01-0205-03Design and implementation of EHSV actuator control system based on PXIHU Zhi-xin1, NIU Xiao-bo1, ZHAO Jian-(1.Chang’an University, Xi’an 710064, China; 2.Equipment Management Department, Qinghai Oil Field Company, Dunhuang 736202, China)Abstract:An electro-hydraulic servo actuator control system based on PXI was designed for the actuator device of one construction machinery by using hydraulic system working principle. On the basis of introducing the principle of the actuator hydraulic circuit, the design of the control system and its component are outlined. This design has solved the problem of large errors in the actuator open-loop control, and has advantages of high control accuracy, high sensitivity, compact structure and reusability.Keywords: EHSV; servo system; actuator; PXI; LabVIEW收稿日期:2011-09-290 引言作动器是一种以液压油为动力源的摆动机构,在飞行器的升降翼、方向舵、水平襟翼以及坦克、船舶、火车等多种需要摆动机构的场合得到了广泛的应用。
TRT发电机组伺服作动器改进
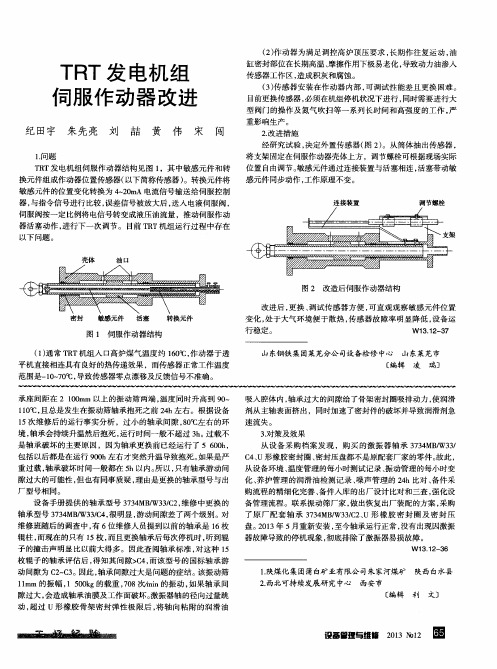
设 备手册提供 的轴 承型号 3 7 3 4 MB / W3 3 / C 2 , 维修 中更换 的 轴 承型号 3 7 3 4 M B , w3 3 , C 4 , 很明显 , 游动间隙差 了两个级别。对 维修班 随后 的调查 中, 有 6位维修人员提到 以前的轴承是 l 6枚 辊柱 , 而现在 的只有 1 5枚 , 而且更换轴承后每次停机时 , 听到辊 子 的撞击声 明显 比以前大得多。因此查阅轴承标准 , 对这种 1 5 枚辊子 的轴 承评估 后 , 得知其 间隙> C 4 , 而该型号 的国标轴承游 动 间隙为 C 2 ~ C 3 。 因此 , 轴承间隙过大是问题 的症结 。 该振动筛
厂 型号 相 同 。 Fra bibliotek从设备环境 、 温度管理的每小时测试记 录、 振动管理 的每小时变
化、 养护管理的润滑油检测记 录 、 噪声 管理的 2 4 h比对 、 备件采 购流程的精细化完善 、 备件入库 的出厂设计 比对和三查 , 强化设 备管理流程。联 系振动筛厂家 , 做 出恢复 出厂装配的方案 , 采购 了原 厂 配套 轴 承 3 7 3 4 MB / W3 3 / C 2 、 U形橡 胶 密封 圈及密 封 压 盘。 2 0 1 3年 5月重新安装 , 至今轴承运行正常 , 没有 出现 因激振
隙过大 , 会造成轴承油膜及工作面破坏。 激振器轴 的径 向过量跳
动, 超过 U形橡 胶骨架密 封弹性极 限后 , 将轴 向粘 附 的润 滑油
设 备 管 理 与 维 雠2 0 1 3 N o 1 2 田
感元件 同步动作 , 工作原理不变。
连 接装 置 调节 螺栓
伺服阀按 一定 比例将 电信号转变成液压油流量 ,推动伺 服作 动
器活塞动作 , 进行 下一 次调节。 目前 T R T机组运行过程 中存在
伺服驱动器硬件原理
伺服驱动器硬件原理
伺服驱动器是一种常见的电机驱动器,用于控制电机的运动。
它由硬件和软件
两部分组成,硬件主要包括电源、变频器、运动控制器和继电器等。
首先,伺服驱动器的电源部分提供所需的电压和电流给电机,使其正常运转。
一般情况下,伺服驱动器采用直流供电方式,使用电源将交流电转换成直流电供给伺服驱动器。
其次,伺服驱动器的变频器部分用于调节电机的转速和转矩。
变频器能够根据
控制信号,调整输出给电机的频率和电压,从而实现电机转速和转矩的精确控制。
这使得伺服驱动器具有快速响应和高精度的特点。
运动控制器是伺服驱动器的关键部分,它负责接收来自控制系统的指令,并将
其转化为电机能够理解的信号。
运动控制器中的位置计数器可以实时监测电机的位置,并根据需求进行反馈控制,使电机达到所要求的位置和速度。
最后,伺服驱动器还包括继电器等辅助部分,用于接收和传递外部的控制信号,如启动信号、停止信号和报警信号等。
继电器的作用是将低电平控制信号转化为高电平输出信号,以驱动电机的启停和控制。
总之,伺服驱动器通过硬件实现对电机的精确控制,包括电源供应、变频控制、运动控制和外部信号输入输出。
这些硬件部件相互协作,使得伺服驱动器能够满足工业和自动化领域对于速度、位置和转矩控制的高要求。
伺服驱动器的工作原理及其控制方式
伺服驱动器的工作原理及其控制方式伺服驱动器(servo drives)又称为伺服控制器、伺服放大器,是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。
一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位,目前是传动技术的高端产品。
目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,实现数字化、网络化和智能化。
功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。
功率驱动单元首先通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。
经过整流好的三相电或市电,再通过三相正弦PWM电压型逆变器变频来驱动三相永磁式同步交流伺服电机。
功率驱动单元的整个过程可以简单的说就是AC-DC-AC的过程。
整流单元(AC-DC)主要的拓扑电路是三相全桥不控整流电路。
随着伺服系统的大规模应用,伺服驱动器使用、伺服驱动器调试、伺服驱动器维修都是伺服驱动器在当今比较重要的技术课题,越来越多工控技术服务商对伺服驱动器进行了技术深层次研究。
伺服驱动器是现代运动控制的重要组成部分,被广泛应用于工业机器人及数控加工中心等自动化设备中。
尤其是应用于控制交流永磁同步电机的伺服驱动器已经成为国内外研究热点。
当前交流伺服驱动器设计中普遍采用基于矢量控制的电流、速度、位置3闭环控制算法。
该算法中速度闭环设计合理与否,对于整个伺服控制系统,特别是速度控制性能的发挥起到关键作用。
一般伺服都有三种控制方式:位置控制方式、转矩控制方式、速度控制方式。
电液伺服双作动器轨道车辆转向架试验台的研制
电液伺服双作动器轨道车辆转向架试验台的研制摘要:介绍了电液伺服双作动器轨道车辆转向架试验台的研制的用途、系统组成和测试原理。
关键词:轨道车辆动车组转向架电液伺服试验台动车组的重要组成部分,就是转向架,转向架的装配、检测的好坏,直接影响整车的舒适性、稳定性甚至安全性。
这就要求设计一套静载模拟试验设备,在转向架未与车厢组装前,模拟车厢的状态,对转向架进行预压,以期在转向架组装前,将可能的问题发现。
提高组装的成品率,使每列动车组更舒适、更安全。
1 设备组成总体结构(见图1)。
1.1 机械部分机械部分主要由三部分组成,即:主机部分、转向架支撑及称重平台和伺服油源。
其中主机包括主立柱、横梁、辅助导向立柱、伺服作动器、压梁和有充气功能的压头组成。
1.2 电气及气动控制系统电控系统包括测量系统、控制系统和强电系统。
测量系统由位移传感器、位移信号放大器、负荷传感器、负荷信号放大器、气压传感器、气压信号放大器组成。
控制系统由电液伺服控制器(包括信号调理部分、数字信号处理部分、信号输出部分)、电液伺服阀。
强电系统由PLC、直流电源、断路器、接触器等组成。
1.3 软件系统电液伺服双作动器轨道车辆试验台是一台以电液伺服技术为核心的试验设备。
采用数字化的电液伺服控制器,利用TI公司最新的运动控制芯片TMS2812,CPU主频达到150MHz,实现了每秒5kHz的伺服更新频率,适应了高静态特性的要求。
控制方式采用传统的PID控制,为了保证该试验台的特性,同时加入前馈控制。
如果仅仅采用PID控制是不足以满足系统的要求,这是因为,PID控制是闭环控制,它需要反馈误差来参与控制,而较高的响应特性必要求较大反馈误差来驱动伺服阀工作,而较大的反馈误差势必增大系统的滞后。
基于此,我们在原有PID控制的基础上,采用了当前比较常用的速度前馈控制,速度前馈控制不需要反馈误差参与。
这样,在原有PID控制基础上增加速度前馈控制,必然会减小系统的滞后,提高系统的响应。
交流伺服驱动器说明书
A1E 系列交流伺服驱动器 用户手册说明书

基本规格 ........................................................................................................................................... 4
速度、位置、转矩控制规格 ........................................................................................................... 5
1
1.1
1.2
1.3
1.4
1.5
2
2.1
2.2
2.2.1
2.2.2
2.3
2.4
2.5
3
3.1
3.2
3.3
4
4.1
4.2
4.3
4.4
4.5
4.5.1
4.5.2
4.5.3
5
安全提醒 ................................................................................................................................................... 1
基于内模控制的主动悬挂电液伺服作动器位置控制研究

农业机械学报第51卷第12期2020年12月doi:10.6041/j.issn.1000-1298.2020.12.043基于内模控制的主动悬挂电液伺服作动器位置控制研究郭庆贺;,2赵丁选;,2赵小龙;,2李振兴;,2武理哲;,2师小波心(1.燕山大学机械工程学院,秦皇岛066004;2.燕山大学河北省特种运载装备重点实验室,秦皇岛066004;3.燕山大学电气工程学院,秦皇岛066004)摘要:针对负载质量和负载力等参数不确定的主动悬挂电液伺服作动器位置控制系统,采用内模控制方法对其进行位置控制。
根据系统特性建立了电液伺服作动器位置控制系统线性化数学模型,并基于此模型设计了内模控制器。
为验证内模控制器的控制效果,进行了与PID控制的对比仿真分析和台架试验。
以阶跃信号为输入信号进行了仿真分析,仿真结果表明,系统在内模控制下的单位阶跃响应快速、平稳、无超调,动态特性优于PID控制,且当系统受到外部干扰时,内模控制比PID控制能更快速、平稳地恢复至稳态值。
台架试验包括改变正弦输入信号频率和改变负载质量两种试验方案。
结果表明,当正弦输入信号频率由0.1Hz增加至2Hz时,基于PID控制的系统跟踪性能明显恶化,而基于内模控制的系统跟踪性能并无明显变化;当负载质量发生变化时,基于内模控制的系统跟踪误差变化幅度明显小于PID控制。
基于内模控制的电液伺服作动器位置控制系统的跟踪响应性能优于PID 控制,满足主动悬挂系统的使用要求。
关键词:主动悬挂;电液伺服作动器;内模控制;位置控制中图分类号:TP273;U463.33文献标识码:A文章编号:1000-1298(2020)12-0394-11OSID:f Internal Model Control in Position Control of Active SuspensionElectro-hydraulic Servo ActuatorGUO Qinghe1';ZHAO Dingxuan1,;ZHAO Xiaolong1,;LI Zhenxing1,;WU Lizhe;,;SHI Xiaobo;'3(1.College of Mechanical Engineering,Yanshan University,Qinhuangdao066004,China2.Key Laboratory of Special Carrier Equipment of Hebei Province,Yanshan University,Qinhuangdao066004,China3.School of Electrical Engineering,Yanshan University,Qinhuangdao066004,China)Abstract:Aiming at the position control system of active suspension electro-hydraulic servo actuator with uncertain load mass and load force,the internal model control method was used to control the position of the actuator.Firstly,according to the characteristics of the system,the linear mathematical model of the electro-hydraulic servo actuator position control system was established,and then the internal model controller was designed based on the model.In order to verify the control effect of internal model controller,the simulation analysis and bench test were compared with PID controller.The step signal was used as the input signal for simulation analysis.The simulation results showed that the unit step response of the system under internal model control was fast,stable,no overshoot,and its dynamic characteristics were better than that of PID control.When the system was disturbed by external interference,it can return to the steady value more quickly and stably than PID control.The bench test included changing the frequency of sinusoidal input signal and changing the load quality.There were three kinds of experimental schemes.The experimental results showed that when the frequency of sinusoidal input signal was increased from0.1Hz to2Hz,the tracking performance of the system based on internal model control had no obvious change,while the tracking performance of the system based on PID control was obviously deteriorated when the sinusoidal input signal frequency was2Hz;the test results of changing load quality showed that when the load quality was changed,the system based on internal model control had no obvious change.The variation range of tracking error was obviously smaller than that of PID control.The 收稿日期:20200806修回日期:2020091;基金项目:国家重点研发计划项目(2016YFC0802902)作者简介:郭庆贺(;992—),男,博士生,主要从事工程机器人研究,E-mail:qinghekwok@通信作者:赵丁选(1965—),男,教授,博士生导师,主要从事复杂机械系统动力学及仿真和工程机器人研究,E-mail:**************.cn第12期郭庆贺等:基于内模控制的主动悬挂电液伺服作动器位置控制研究395tracking response performance of electro-hydraulic servo actuator position control system based on internal model control was better than that of PID control,and can meet the requirements of active suspension system.Key words:active suspension;electro-hydraulic servo actuator;internal model control;position control0引言电液伺服作动器是中型、重型车辆主动悬挂系统实施主动控制的核心部件,其作动性能直接影响主动悬挂系统的性能,进而影响整车的行驶平顺性和操纵稳定性。
伺服驱动器中文说明书
1.系统描述...................................................................................................................................- 3 -1.1系统布局图.......................................................................................................................................................- 4 -1.2基本原理...........................................................................................................................................................- 5 -1.3设备说明...........................................................................................................................................................- 6 -1.3.1电动缸DEMxB...........................................................................................................................................- 6 -1.3.2接线盒和电缆..........................................................................................................................................- 8 -1.3.3ACV9BR伺服驱动器...............................................................................................................................- 10 -2.技术规格....................................................................................................................................- 16 -2.1电动缸特性.....................................................................................................................................................- 16 -2.2伺服驱动器的技术特性.................................................................................................................................- 18 -2.3附属设备的技术规格.....................................................................................................................................- 20 -2.3.1主电源变压器........................................................................................................................................- 20 -2.3.2再生电阻RRC.........................................................................................................................................- 20 -2.3.3外部过滤器EFBR...................................................................................................................................- 21 -3.安装和接线.............................................................................................................................- 22 -3.1电动缸在塞棒机构上的安装.........................................................................................................................- 22 -3.1.1塞棒机构的准备....................................................................................................................................- 22 -3.1.1.1 塞棒机构固定件的图纸.....................................................................................................................- 22 -3.1.1.2 DEM电动缸在塞棒机构上的正确安装..............................................................................................- 23 -3.1.1.3塞棒机构间隙和阻力的检查..............................................................................................................- 24 -3.1.2电动缸的安装........................................................................................................................................- 26 -3.1.3塞棒的安装............................................................................................................................................- 27 -3.1.4隔热保护................................................................................................................................................- 28 -3.2.1接线盒JB9BR的安装说明.....................................................................................................................- 30 -3.2.2电缆说明................................................................................................................................................- 30 -3.2.3接线推荐规范和CE标准.......................................................................................................................- 32 -3.2.3.1 屏蔽线的接地.....................................................................................................................................- 32 -3.2.3.2 内部金属导体之间的连接.................................................................................................................- 32 -3.2.3.3 接线盒内的电缆连接.........................................................................................................................- 33 -3.2.3.4 驱动器侧的电缆连接.........................................................................................................................- 34 -3.2.4热区电缆的连接....................................................................................................................................- 35 -3.3驱动器ACV9BR的安装和接线.......................................................................................................................- 36 -3.3.1尺寸........................................................................................................................................................- 36 -3.3.2安装、定位和冷却................................................................................................................................- 37 -3.3.3电源的连接............................................................................................................................................- 39 -4.操作........................................................................................................................................- 40 -4.1手动模式.........................................................................................................................................................- 40 -4.2远程工作模式.................................................................................................................................................- 41 -4.3自动模式.........................................................................................................................................................- 41 -4.4塞棒关闭和安全装置.....................................................................................................................................- 42 -4.4.1塞棒关闭................................................................................................................................................- 42 -4.4.2断开电机电源(可选项).....................................................................................................................- 42 -4.5运行故障的处理.............................................................................................................................................- 43 -5.维护........................................................................................................................................- 44 -5.1检查周期.........................................................................................................................................................- 44 -5.2电动缸的检查和维护.....................................................................................................................................- 45 -5.3推荐的备件.....................................................................................................................................................- 49 -5.4伺服驱动器的故障代码.................................................................................................................................- 53 -5.5故障的数字输出代码.....................................................................................................................................- 57 -5.6驱动器复位和状态显示.................................................................................................................................- 58 -5.7没有报警显示时的故障排除.........................................................................................................................- 59 -6.辅助设备.................................................................................................................................- 61 -6.1DEM系列电动缸的测试台..............................................................................................................................- 61 -6.2塞棒机构MQS..................................................................................................................................................- 61 -1.系统描述SERT的塞棒执行器系统用于控制塞棒和塞棒机构的位置,以控制流入结晶器的钢水的流量。
VA-M系列机床主轴伺服驱动器V3.0

第六章 连接调试和功能参数设置 ............................................................................................ 39 6−1 和数控系统的连接 ....................................................................................................... 40 6−2 调试与功能参数设置 .................................................................................................... 44
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
经过一年多的市场推广,W+B 公司中国区以产品高性价比已获得几十套设备订单。
作为世界中立国,我们不设技术封锁,提供中国市场最尖端的试验技术产品,代表欧洲, 也是当今世界范围最精良的机械设备。
网址: /
of a double ended actuator with the
Features
precision control of large loads through
compact size of a single-ended, double-
• Bonded polymer bearings: Non metallic
vide long life and resist bearing-to-rod
have an internally mounted transducer
fatigue rated rod end swivels and base
galling failures are used.
that provides repeatable and accurate
setups.
• Load washers: Load washers preload
force train element connections to avoid
backlash and fatigue failure between at-
tached components. Available in varying
long displacements are easily met.
acting model.
bearing surfaces for all bearings to pro- • Displacement transducer: All actuators • Swivels and base ends: The Series GKD
the tensile and compressive forces. This
fatigue rated.
aviation, aerospace and civil engineer-
gives you the equal force performance
ing customer’s testing requirements for
thickness load washers let you quickly
preload attached components.
• Stroke lengths: Customized stroke
lengths are available upon request.
• Special manifolds: A variety of servo-
B
Piston Stroke
Standard: 250 / 500 / 750 / 1000 mm. Others upon request.
Displacement Transducer Standard: integrated in the actuator.
C
D
AGD
50 100 150 250 350 500 650
Max. Test Load Compression
kN
50 100 150 250 350 500 650
Max. Test Load Tension
kN
30 60 100 150 250 300 450
E
Overall Length 250 mm Stroke mm 1026 1026 1204 1204 1314 1443 1588
138 Structural Testing
Materials Testing Systems
Differential Servo-Actuators Series AGD 50 – 6500 kN
The Series AGD differential actuators are designed for structural testing applications. They are fatigue rated, double acting, single ended linear actuators with either 250 mm, 500 mm, 750 mm, 1000 mm stroke lengths and force ratings from 50 kN / 30 kN up to 6500 kN / 5000 kN.
Structural Testing 139
Specifications
A
Accuracy Control
In accordance with ISO 7500-1 and EN 10002-2, Grade 0.5.
Force, displacement, acceleration closed loop controlled.
er when removing the gland assembly.
the actuator enables you to equalizes
for high-force, quasi-static applications and are • High performance and long stroke:
公司提供全方位的结构测试及材料试验设备,并擅长根据用户特殊要求定制独一无二的 测试系统。主要市场几十年来稳定在以德国、俄罗斯军工为首的欧洲市场,多家世界顶级实 验室基本全套采用 W+B 设备,如材料力学鼻祖德国摩尔实验室、MPA 等实验室的 3000 吨、 2000 吨、1000 吨动态疲劳试验机和多作动器系统等。产品遍布全球大多数国家。
valves, manifolds and close-coupled ac-
cumulator options can help customize
an actuator for various applications.
walter+bai Testing Machines
Materials Testing Systems
ends or ball joints Series JB can help
• Ease of service: Innovative design per-
displacement measurements.
reduce side loads and force alignment
problems and eliminate backlash in test
Typical applications include static component
mits the piston rod bearings and cylinder Accessories
life cycle testing, low frequency cycle testing
seals to be replaced easily. The bearing • Compression side relief valve: Applying
I
Overall Length 1000 mm Stroke mm 3030 3239 3520
Rod Diameter
mm 133 152 203 203 254 254 3005
J
K
L
M N O P Q R S T
walter+bai Testing Machines
瑞士 walter+bai ag(简称 W+B)试验设备公司的前身为百余年前的 Amsler 公司,1970 年正式更名,是世界上首屈一指的试验机生产商。产品应用领域很广:汽车和航空工业、金 属工业、塑料和橡胶等非金属工业、化学工业、建材工业、生物机械等方面。
H
customized stroke
customized stroke
customized stroke
customized stroke
Overall Length 250 mm Stroke mm 1735 1943 2225
Overall Length 500 mm Stroke mm 2167 2375 2657 Overall Length 750 mm Stroke mm 2598 2807 3089
Overall Length 500 mm Stroke mm 1458 1458 1636 1636 1746 1875 2019
Overall Length 750 mm Stroke mm
-
- 2068 2068 2178 2306 2451
F
Overall Length 1000 mm Stroke mm
-
-
-
- 2610 2738 2883
Rod Diameter
mm 44 44 70 70 95 114 114
G
Type AGD
1000 1500 2000 2500 4000 5000 6500
Max. Test Load Compression Max. Test Load Tension
kN 1000 1500 2000 2500 4000 5000 6500 kN 600 1000 1300 2000 3000 4000 5000
of structures and quasi-static durability tests.
retainer assembly acts as a bearing pull-
a relief valve to the compression side of