为什么最好的机械臂是7个自由度而不是6个自由度
机器人技术导论6自由度
机器人技术导论以6自由度工业机器人为例,分析讨论机器人的控制:工业机器人能够提高生产过程的自动化程度和生产设备的适应能力,因而提高产品质量和产品在市场上的竞争能力。
全世界已有约80万台工业机器人正在汽车工业、机电工业和其他工业部门运行,为人类的物质生产建功立业。
其中,以焊接机器人和装配机器人为两个最主要的应用领域。
与工业机器人相比,其他机器人的数量尚十分有限,但其重要性不容忽视,发展前景也十分看好。
市场上供应的工业机器人,关节数多为3~7个。
最典型的工业机器人具有六个关节,存在六个自由度,带有夹手(通常称为手或末端执行装置)。
辛辛那提-米拉克龙T3、尤尼梅逊的PUMA650和斯坦福机械手都是具有六个关节的工业机器人,并分别由液压、气压或电气传动装置驱动。
位置控制:工业机器人位置控制的目的,就是要使机器人各关节实现预先所规划的运动,最终保证工业机器人终端(手爪)沿预定的轨迹运行。
这类运动控制的特点是连续控制工业机器人手爪(或工具)的位姿轨迹。
一般要求速度可控、轨迹光滑且运动平稳。
轨迹控制的技术指标是轨迹精度和平稳性。
工业机器人的控制是个多输入一多输出控制系统。
我们把每个关节作为一个独立的系统。
因而,对于一个具有m个关节的工业机器人来说,我们可以把它分解成m个独立的单输入一单输出控制系统。
这种独立关节控制方法是近似的,因为它忽略了工业机器人的运动结构特点,即各个关节之间相互耦合和随形位变化的事实。
如果对于更高性能要求的机器人控制,则必须考虑更有效的动态模型、更高级的控制方法和更完善的计算机体系结构。
仅控制机器人离散点上手爪或工具的位姿,尽快而无超调地实现相邻点的运动,对运动轨迹不作控制。
主要技术指标:点位精度、完成运动的时间。
2机器人控制系统结构及工作原理基于PC的Windows操作系统,因其友好的人机界面和广泛的用户基础,而成为基于PC控制器的首选。
采用PC作为机器人控制器的主机系统的优点是:①成本低;②具有开放性;③完备的软件开发环境和丰富的软件资源;④良好的通讯功能。
三维空间中六自由度机械臂位姿确定方法

一、概述在工业自动化和机器人领域,机械臂是广泛应用的一种机械设备,它的位姿确定对于机器人的运动控制和任务执行具有至关重要的意义。
六自由度机械臂作为一种自由度相对较高的机械臂,其位姿确定方法是一个复杂而且具有挑战性的问题,但是确切的位姿确定是机器人能否完成各种复杂任务的基础。
在三维空间中六自由度机械臂位姿确定方法的研究具有重要的理论和实际意义。
二、六自由度机械臂的运动特性六自由度机械臂是指在三维空间中具有六个自由度的机械臂,分别是三个平移自由度和三个旋转自由度。
在运动学分析中,通常使用笛卡尔坐标系和关节坐标系来描述机械臂的位置和位姿。
其中,笛卡尔坐标系用来描述机械臂末端执行器的位置和姿态,而关节坐标系则用来描述机械臂各个关节的角度和位置。
机械臂的位姿确定就是要确定机械臂末端执行器在笛卡尔坐标系中的位置和姿态,通常用位置矢量和姿态矩阵来表示。
三、基于解析法的位姿确定方法基于解析法的位姿确定方法是一种最基本的方法,它是通过对机械臂的运动学方程进行求解来确定机械臂的位置和姿态。
在这种方法中,通常需要对机械臂的几何结构和运动学参数进行精确的建模和描述,然后利用正演运动学方程来求解机械臂的位置和姿态。
这种方法的优点是能够精确地求解出机械臂的位置和姿态,但是也存在着计算复杂度高和数学求解困难的缺点。
四、基于迭代法的位姿确定方法基于迭代法的位姿确定方法是一种比较常用的方法,它是通过对机械臂的正逆运动学方程进行迭代求解来确定机械臂的位置和姿态。
在这种方法中,通常首先根据机械臂的末端执行器的目标位置和姿态,利用逆运动学方程求解出机械臂的关节角度,然后再利用正运动学方程求解出机械臂的位置和姿态。
这种方法的优点是计算简单,并且能够通过迭代计算得到精确的结果,但是也存在着迭代次数多和收敛速度慢的缺点。
五、基于视觉传感器的位姿确定方法随着计算机视觉和图像处理技术的不断发展,基于视觉传感器的位姿确定方法也越来越受到关注。
这种方法是利用摄像头或者其他视觉传感器来获取机械臂末端执行器的图像信息,然后通过图像处理和计算机视觉技术来确定机械臂的位置和姿态。
七自由度柔性机械臂机构说明.

七自由度柔性机械臂机构说明设计目标由于人工成本的不断提升,人们的刚性需求也不断的扩大,生产自动化越来越被人们所重视。
也是社会发展的必然。
让机器人去完成一些高危、肮脏、重复、精度高的工作。
由此,设计一款高精度,高灵活性的机器臂显得更为重要。
设计的目标:高精度仿人工业机器人。
运用先进的仿生理论与柔性设计为基础,设计开发用二次式运动反馈来实现其高精度控制,合理的仿人机构来完成动动。
机械臂整体设计方案一、功能需求:满足实现模仿人类手臂的基本功能,自由度包括手臂的肩部的抬起,摆动,旋转,肘部的弯曲,腕部的旋转,弯曲,摆动共7个自由度。
(图一)图一图二二、优化后确定的构型:自由度包括手臂的肩部的摆动,抬起,大臂旋转,肘部的弯曲,小臂的旋转,腕部的弯曲,摆动共7个自由度。
(图二)三、驱动模块示意设计:(图三)胡克定律是力学基本定律之一。
适用于一切固体材料的弹性定律,它指出:在弹性限度内,物体的形变跟引起形变的外力成正比。
这样增加了力的反馈测量。
在弹性材料在弹性限度内形变时,测得其形变量,从而计算出受力与关节下方所处的位置。
1.先进行测试图三四、机械臂的具体设计方案,(图四)五、各关节的受力分析:基本尺寸图(图五)图五L1=426mm,L2=293mm,L3=108mm,L4=442mm。
六、马达的初选谐波减速器的优点:Harmonic减速器结构简单,体积小,重量轻、啮合的齿数多、承载能力大、运动精度高、运动平稳、间隙可以调整、传动效率高、同轴性好、可实现向密闭空间传递运动及动力。
瑞士Maxon电机优点:轴向窜动和径向跳动小、温度范围大、回差小等,并且电机型号全编码器与抱闸与控制器配套全面。
瑞士Maxon电机与日本Harmonic谐波减速器选型需求示例图片:图六马达1:EC90flat 90W扭力:4.67 nm 0.387nm;转速:3190rpm;重量:648g减速器1:CSG-25-160 减速比:1:160;最大扭力:314nm;正常:176nm;重量:420g马达2:EC-4pole max30 200W 扭力:3.18 nm 0.112nm;转速:17000rpm;重量:300g减速器2:CSG-25-160 减速比:1:160;最大扭力:314nm;正常:176nm;重量:420g马达3:EC max40 170W 扭力:2.66nm0.16nm;转速:9840rpm;重量:580g减速器3:CSG-17-120 减速比:1:120;扭力最大:112nm;正常:70nm;重量:150g马达4:EC45flat 70W 扭力:0.82nm0.13nm;转速:4840rpm;重量:110g减速器4:CSG-20-160 减速比:1:160;最大扭力:191nm;正常:120nm;重量:280g马达5:EC-4pole max30 100W 扭力:1.24nm 0.0 63nm;转速:17800rpm;重量:210g减速器5:CSD SHD-17-100 减速比:1:100;最大扭力:71nm;正常:37nm;重量:100g 马达6:EC45flat 70W 扭力:0.13 nm 0.17nm;转速:4840rpm重量:110g减速器6:CSF-11-100 减速比:1:100;最大扭力:25nm;正常:11nm;重量:50g马达7:EC-4pole max30 100W 扭力:1.24nm 0.0 63nm;转速:17800rpm;重量:210g减速器7:CSF-11-100 最大扭力:25nm;正常:11nm;重量:50g说明:EC45flat 70W要更换为EC-I40 70W+MR七、受力分析:有效扭力计算公式:(堵转-连续)*0.3+连续质量分配:设大臂小臂均为,外径D=110mm,假设主体为外壁壁厚为L=5mm的铝壳,长度为H=250mm,则体积为:412cm3,铝的密度2.7g/cm3,外壳质量为1.1kg大臂部分质量有马达3(580g)减速器(150g),外壳(1.1kg);小臂部分有马达4567(110g,210g,110g,210g),减速器4567(280g,100g,50g,50g),外壳(1.1kg);手部主要是灵巧手的质量设为1kg;外加假设载荷6kg。
为什么好的机械臂有七个自由度而不是六个?
为什么好的机械臂有七个自由度而不是六个?机械臂是一种能够模拟人类手臂运动的机器人,它能够进行各种复杂的动作任务。
机械臂的自由度是指它的运动自由度,包括旋转和移动两种方式。
常见的机械臂在设计时通常有七个自由度,这一设计方案的背后是有很多原因的。
机械臂的自由度定义机械臂的自由度是指它可以进行的自由运动的数量。
我们可以将自由度定义为机械臂末端的每个自由度所需的独立运动参数。
这些参数可以是位置(三个参数确定一个点的位置)、方向(三个参数确定一个矢量)、角度或曲率。
以工业机械臂为例,它的末端可以进行位置移动(三个自由度)、三维旋转(三个自由度)和手掌的张合(一个自由度)。
这样,一个机械臂就可以在三维空间内进行各种操作,例如在工业生产线上抓取物体、搬运货物等。
为什么好的机械臂有七个自由度而不是六个?通常情况下,一个机械臂需要七个自由度来完成运动控制任务。
这一设计方案的主要原因是:在机械臂末端需要完成六个自由度的运动控制,而在机械臂的基座上还需要一个自由度的运动控制。
具体而言,这七个自由度的运动特性分别为:1.基座旋转自由度:机械臂可以绕着固定点进行旋转,固定的点称为基座。
2.肩部旋转自由度:机械臂可以在基座旋转的基础上进行大臂的旋转。
3.肘部旋转自由度:机械臂大臂可以进行肘部的旋转。
4.手腕旋转自由度:机械臂可以在肘部旋转的基础上进行手腕的旋转。
5.左右移动自由度:机械臂可以左右移动。
6.上下移动自由度:机械臂可以进行上下移动。
7.夹取自由度:机械臂末端可以进行手掌的张合。
对于机械臂这种在工业自动化生产中广泛应用的设备,七自由度的设计具有很多优势,例如:1.能够实现更加复杂的任务需求,例如在三维空间内掌握小物品、装配零件等。
2.具有更高的控制精度,这可以在加工、制造等场合中获得更好效果。
3.可以根据不同的操作需求进行调整,例如加装感应器、夹具等设备。
综上所述,把机械臂的自由度设计为七个是在众多机械设计方案中经过长期优化、调节得到的结果,这一设计方案在实际应用中具有广泛的推广性和实用性,因此,七自由度机械臂是一种好的设计方案。
工业机器人自由度一般有几个,自由度越多越好吗-
工业机器人自由度一般有几个,自由度越多
越好吗?
机器人机构能够独立运动的关节数目,称为机器人机构的运动自由度,简称自由度。
通常自由度作为机器人的技术指标,能反映机器人动作的灵活性,可用轴的直线移动、摆动或旋转动作的数目来表示。
目前工业机器人采用的控制方法是把机械臂上每一个关节都当作一个单独的伺服机构,即每个轴对应一个伺服器,每个伺服器通过总线控制,由控制器统一控制并协调工作。
工业机器人具备自动控制及可再编程、多用途功能,机器人操作机具有三个或三个以上的可编程轴,在工业自动化应用中,机器人的底座可固定也可移动,可见工业机器人的轴数是其重要技术指标。
工业机器人自由度一般有几个?大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
机器人自由度越多越好吗?一般情况下,机器人的自由度越多,就越接近人手的动作技能,通用性也就越好,但自由度越多,其结构就会更加的复杂,那么对机器人的整体要求就越高,在设计和制造方面就越困难。
虽然随着轴数也就是自由度的增加,机器人的灵活性也随之增长,但在目前的工业应用中,用的较多的也就是三轴、四轴、五轴双臂和六轴的工业机器人,轴数的选择通常取决于具体应用。
这是因为在更加具体的行业应用中,往往并不需机器人具备很高的灵活性,而三轴、四轴机器人具有更高的成本效益,并且在速度上也具有更大的优势。
基于六自由度机械臂精密抓取的算法研究
基于六自由度机械臂精密抓取的算法研究精密抓取是指机械臂在特定的环境中准确、稳定地抓取和放置物体的过程。
在现代制造业和服务业中,精密抓取技术的应用十分广泛,如装配线上的物料搬运、仓储物流、医疗手术辅助等领域。
六自由度机械臂作为一种灵活性较高的机械结构,被广泛用于实现精密抓取。
为了提高六自由度机械臂在精密抓取任务中的准确性和稳定性,研究人员们进行了大量的算法研究。
一、六自由度机械臂精密抓取的意义六自由度机械臂指的是具有6个自由度即可在三维空间内实现任意位置和姿态的机械臂。
在精密抓取任务中,六自由度机械臂具有以下重要意义:1. 灵活性:六自由度机械臂具有较高的灵活性,可以实现各种复杂的姿态和位置调整,适应不同精密抓取任务的需求。
2. 精度:六自由度机械臂的运动可以通过对关节位置和速度的精确控制来实现,从而实现高精度的抓取和放置操作。
3. 自适应性:六自由度机械臂可以通过传感器等反馈机制实时感知环境信息,并根据环境变化进行自适应调整,提高精密抓取的稳定性和准确性。
二、六自由度机械臂精密抓取的算法研究为了实现六自由度机械臂的精密抓取,研究人员们针对不同的任务需求,提出了多种算法和方法。
下面将介绍一些常见的算法研究方向:1. 运动规划算法:六自由度机械臂的精密抓取涉及到复杂的运动规划问题。
研究人员通过研究机械臂的运动学和动力学模型,提出了不同的运动规划算法,如逆运动学算法、轨迹规划算法等,以实现精准的抓取和放置操作。
2. 视觉感知算法:精密抓取任务中,机械臂需要对目标物体进行准确的感知和定位。
研究人员通过图像处理和计算机视觉技术,开发了一系列的视觉感知算法,如物体识别、目标检测和姿态估计等,以提高机械臂的感知和定位能力。
3. 力控制算法:精密抓取任务中,机械臂需要精确控制抓取力度,以避免对目标物体的损伤或失稳。
研究人员通过力传感器等装置,开展了力控制算法的研究,实现了对抓取力度的准确控制,以提高精密抓取任务的稳定性和安全性。
机械臂自由度个数的来源是什么?
机械臂自由度个数的来源是什么?在力学里,自由度指的是力学系统的独立坐标的个数。
力学系统由一组坐标来描述。
比如一个质点的三维空间中的运动,在笛卡尔坐标系中,由x,y,z三个坐标来描述;或者在球坐标系中,由α,β,γ三个坐标描述。
描述系统的坐标可以自由的选取,但独立坐标的个数总是一定的,即系统的自由度。
一般而言,N个质点组成的力学系统由3N个坐标来描述。
但力学系统中常常存在着各种约束,使得这3N个坐标并不都是独立的。
对于N个质点组成的力学系统,若存在m个完整约束,则系统的自由度减为S=3N-m。
机器人设计中的机械臂自由度是比较大的,如果采用多舵机提供动力分别传动的话就更复杂了。
现在用的最多的工业机器人一般都是六轴的,但是最近推出来的一些人机协作机械臂却是7个自由度。
为什么呢?因为7个自由度是对人的手臂的真实还原。
6个自由度的机械臂无法在保持末端机构的三维位置不变的情况下从一个构型变换到另一个构型。
可以考虑一个简单的情况:在这张(俯视)图上,一个机器人的手臂由基座、两个关节、两根连接件构成,由图片可知,我们不能把机器人在保持上部末端机构在平面上位置不变的情况下,从“LEFTY”扭到“RIGHTY”。
不管怎么移动关节,末端机构的位置肯定要变。
同样地,一个自由度为6的机械臂,即使某两组构型对应的末端机构的三维位置相同,机械臂在从一个构型移动到另一个构型的时候也无法保持末端机构始终不动。
我们经常会看到工业机器人在同一个位置焊接时,会扭来扭去的,事实上这么做的原因是虽然焊接时只需要改变末端机构的朝向,而不用改变末端机构的位置,但是它必须要往后退一些,通过扭动调整自己的位置,才能保证在移动末端机构朝向的过程中不会撞到东西,因为移动的时候末端机构的三维位置一定会乱动。
而多了一个自由度以后就不一样了。
联想一下我们通过转动手腕从而转动钥匙开门的动作。
那么为什么不再多给我们一些自由度呢?因为自由度越多,机械手刚性越差。
六个自由度机器人设计报告
基于PLC的六自由度机械手复杂运动控制学院:电气工程与自动化学院专业班级:自动化133班学号:07号学生姓名:***指导老师:刘飞飞老师日期:2016/5/20近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获得应用。
我国在机器人的研究和应用方面与工业化国家相比还有一定的差距,因此研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是有现实意义的。
典型的工业机器人例如焊接机器人、喷漆机器人、装配机器人等大多是固定在生产线或加工设备旁边作业的,本论文作者在参考大量文献资料的基础上,结合任务书的要求,设计了一种小型的实现移动的六自由度串联机器人。
首先,作者针对机器人的设计要求提出了多个方案,对其进行分析比较,选择其中最优的方案进行了结构设计;同时进行了运动学分析,用D- H 方法建立了坐标变换矩阵,推算了运动方程的正、逆解。
机器人广泛应用于工业、农业、医疗及家庭生活中,工业机器人主要应用领域有弧焊、点焊、装配、搬运、喷漆、检测、码垛、研磨抛光和激光加工等复杂作业。
总之,工业机器人的多领域广泛应用,其发展前景广阔。
关键词:机器人关节,运动学分析,工业机器人,自由度第一章绪论 (4)1.1引言 (4)1.2机器人的产生与发展史 (4)1.3国内外机器人的发展状况及发展战略 (6)1.4六自由度机械手复杂运动控制的现实意义 (9)1.5 PLC在设计中的应用 (10)第二章机械手的总体方案设计 (11)2.1 机械手基本形式的选择 (11)2.2 机械手的主要部件及运动 (12)2.3驱动机构的选择 (12)2.4传动机构的选择 (12)第三章六自由度机械手的坐标建立及运动学分析 (13)3.1 系统描述及机械手运动轨迹设计方式 (13)3.1.1 机器人技术参数一览表 (13)3.1.2 机械手运动轨迹设计方式 (14)3.2 平面复杂轨迹设计目的 (18)3.2.1“西”字的轨迹设计和分析 (18)3.2.2“南”字的轨迹设计和分析 (19)3.2.3机械手的起始位姿和末态位姿 (20)3.3机械手轨迹设计中坐标系的建立 (20)3.4 平面轨迹设计的正运动学分析 (29)3.4.1. 平面轨迹设计的正运动学分析原理 (29)3.4.2 正运动学分析步骤及计算 (29)3.5 六自由度机械手轨迹设计中的逆运动学分析 (30)3.5.1.机械手逆运动学分析原理 (30)3.5.2.逆运动学分析步骤及计算 (31)第四章PLC控制机械手运动轨迹设计与分析 (35)4. 1可编程序控制器的选择及工作过程 (35)4.1.1 可编程序控制器的选择 (35)4.1.2 可编程序控制器的工作过程 (35)4.2 控制系统设计 (36)(一)控制系统硬件设计 (36)1. PLC梯形图中的编程元件 (37)2. PLC的I/O分配 (37)3 机械手控制系统的外部接线图 (38)(二)控制系统软件设计 (38)第五章总结 (40)参考文献 (41)第一章绪论1.1引言机器人是当代科学技术的产物,是高新技术的代表。
6自由度控制算法

6自由度控制算法在机器人控制与运动规划中,6自由度(6DoF)控制算法是一种常用的方法。
这种算法可以实现对机械臂或机器人的六个自由度进行精确控制,使其在三维空间内能够实现各种复杂的运动轨迹和任务。
6自由度控制算法的核心思想是:通过对机械臂的关节角度进行精确控制,从而实现末端执行器的运动。
一般来说,典型的6自由度机械臂由6个关节组成,每个关节可以控制一个自由度。
常见的机械臂有工业机械臂、服务机器人臂等。
实现6自由度控制的算法可以分为两个主要步骤:逆运动学求解和控制器设计。
逆运动学求解是根据机械臂的末端位姿(位置和姿态),确定关节角度以实现期望运动。
控制器设计是针对不同的任务需求,设计合适的控制策略以保证机械臂的精确控制和稳定性。
在逆运动学求解方面,一种常用的方法是使用解析解法。
对于六自由度的机械臂,可以通过对正运动学方程求逆,从而得到关节角度与末端位姿之间的映射关系。
一般来说,这种方法可以快速计算出关节角度,但对于一些特殊情况(例如奇异构型)可能无法求解解析解,需要使用数值解法来求解逆运动学问题。
在控制器设计方面,常见的方法包括PID控制、基于模型的控制(如轨迹跟踪控制、力/力矩控制)和基于反馈线性化的控制等。
PID控制是一种经典的控制策略,通过调节比例、积分和微分参数,实现机械臂位置和速度的精确控制。
基于模型的控制方法利用机械臂的动力学模型,通过预测机械臂的运动轨迹或实施力/力矩控制来实现精确控制。
而基于反馈线性化的控制方法,则通过设计非线性转换器和线性控制器,将非线性动力学系统转化为线性系统,从而实现控制目标。
除了逆运动学求解和控制器设计,6自由度控制算法还需要考虑如传感器选取与数据融合、路径规划、碰撞检测和碰撞回避等问题。
传感器可以提供机械臂的姿态和位姿信息,用于控制系统的反馈;数据融合则将多个传感器的信息进行整合,提高机械臂的感知能力。
路径规划是将机械臂的运动轨迹优化为最佳路径,以提高运动效率和精确度。
五自由度机械臂运动和控制仿真分析

五自由度机械臂运动和控制仿真分析五自由度机械臂是一种能够在三维空间中进行精确运动和控制的机械设备。
它由五个连接在一起的关节组成,每个关节都可以独立地进行运动,从而实现各种姿态和位置的控制。
在机械臂的运动和控制中,仿真分析起着重要的作用。
通过仿真分析,可以通过计算和模拟来研究机械臂的运动学和动力学特性,以及其控制系统的稳定性和精确性。
首先,我们来讨论机械臂的五个自由度。
这五个自由度分别是基座旋转、第一关节旋转、第二关节旋转、第三关节旋转和末端执行器的平移。
通过控制这五个自由度的运动,机械臂可以实现在三维空间中任意姿态和位置的控制。
在运动学分析中,我们需要计算机械臂的正逆运动学。
正运动学用于根据关节角度计算末端执行器的位置和姿态,而逆运动学则用于根据末端执行器的目标位置和姿态计算关节角度。
通过正逆运动学分析,我们可以确定机械臂关节的运动范围,以及实现特定位置和姿态的方法。
在动力学分析中,我们需要研究机械臂的惯性、力矩和加速度等特性。
这些特性决定了机械臂在运动和受力时的稳定性和精确性。
通过动力学分析,我们可以确定机械臂所需的驱动力矩和控制策略,以实现预定的运动轨迹和姿态。
在控制系统方面,我们需要设计和实现适应机械臂运动和控制的控制算法。
这些算法可以基于传感器反馈信息来调整关节的运动,以实现精确的位置和姿态控制。
通过仿真分析,我们可以评估不同控制算法的性能和稳定性,从而选择最合适的控制策略。
为了进行仿真分析,我们可以使用计算机辅助设计和仿真软件。
这些软件可以提供强大的建模和仿真功能,使我们能够快速而准确地模拟机械臂的运动和控制过程。
通过仿真分析,我们可以预测机械臂在特定任务中的性能和表现,从而指导实际应用中的设计和控制。
综上所述,五自由度机械臂的运动和控制仿真分析是了解和优化机械臂工作性能的关键。
通过正逆运动学、动力学和控制仿真分析,我们可以研究机械臂的运动特性、控制策略和性能指标,从而实现更精确、高效的机械臂应用。
七轴工业机器人与六轴相比有什么优势?

七轴工业机器人与六轴相比有什么优势?近年来,跨国机器人巨头们纷纷推出七轴工业机器人,以抢占高端新市场,这引发了我们对于七轴工业机器人的深入思考,它具有哪些独特的技术优势,存在哪些研发难点,近年来国际上发布了哪些工业七轴机器人产品,我国七轴工业机器人的研发及产业化又进入了哪一阶段?工业机器人到底应该有几个轴?目前,工业机器人已经被广泛应用于各行各业,但我们也发现,工业机器人不仅形状各异,其轴数也各不相同。
所谓工业机器人的轴,可以用专业的名词自由度来解释,如果机器人具有三个自由度,那么它可以沿x,y,z轴自由的运动,但是它却不能倾斜或者转动。
当机器人的轴数增加,对机器人而言,就是更高的灵活性。
那么工业机器人应该有几个轴才合理呢?三轴机器人也被称为直角坐标或者笛卡尔机器人,它的三个轴可以允许机器人沿三个轴的方向进行运动,这种机器人一般被用于简单的搬运工作之中。
四轴机器人,可以沿着x,y,z轴进行转动,与三轴机器人不同的是,它具有一个独立运动的第四轴,一般来说SCARA机器人就可以被认为是四轴机器人。
五轴是许多工业机器人的配置,这些机器人可以通过x,y,z三个空间周进行转动,同时可以依靠基座上的轴实现转身的动作,以及手部可以灵活转动的轴,增加了其灵活性。
六轴机器人可以穿过x,y,z轴,同时每个轴可以独立转动,与五轴机器人的最大区别就是,多了一个可以自由转动的轴。
六轴机器人的代表就是优傲机器人,通过机器人身上的蓝色盖子,你可以很清楚的计算出机器人的轴数。
七轴机器人,又称为冗余机器人,相比六轴机器人额外的轴允许机器人躲避某些特定的目标,便于末端执行器到达特定的位置,可以更加灵活的适应某些特殊工作环境。
随着轴数的增加,机器人的灵活性也随之增长。
但是,在目前的工业应用中,用得最多的是三轴、。
六自由度机械手运动分析
六自由度机械手毕业论文专业机械设计制造及其自动化课题多自由度机械手机械设计摘要文中设计了一种六自由度机械手。
该机械手主要由底座,腰部,主板,大手臂,小手臂,手腕,夹爪组成,采用步进电机驱动,单片机控制。
手臂的尺寸与人手臂的大小相当。
手臂的运动主要包括:腰部转动,大手臂摆动,小手臂摆动,手腕摆动,手腕转动,夹爪夹取。
此手臂的空间活动半径0.5m,定位精度为5mm.它能够抓取重量较轻的物体,并放到预定位置。
该机械手有过载保护以及断电空间位置的自锁功能.可以用于教学演示,或者在有放射性的环境中完成特定工作。
文中对机械手进行了正运动学分析, 采用齐次坐标变换法得到了机械手末端位置和姿态随关节夹角之间的变换关系,并完成了总体机械结计、步进电机选型、蜗轮蜗杆及带传动比的确定以及部分重要零件的设计。
关键词:机械手六自由度步进电机同步带。
AbstractA kind of manipulator of six degrees of freedom has been designed in this paper. This manipulator is made up of the foundation, the waist, the big arm, the small arm, the wrist, and the claw; the manipulator is driven by stepper motor, and controlled by single chip. The size of the manipulator is equal in the size to the arms of people. Locomotion of the manipulator includes: waist turning, big arm swung, small arm swung, wrist swung, wrist rotating, claw fetching. The radius of action is 0.5m, and the accuracy is 5 mm. It can pick the light-weight object, and put it to the recalculated position. The manipulator has overload protection function, and space position self-lock function. This arm can be used in teaching, or in radioactive environments. In this paper, robot kinematic analysis is carried out using homogeneous coordinate transformation method was the end manipulator joint position and attitude with the changing relationship between the angle and stepper motor designing, physical construction designing had been completed.Keywords: manipulator, six degrees of freedom, stepper motor, locking band.目录目录 (4)1 绪论 (6)1.1 国内机械手研状 (6)1.2 机械手的构成 (7)1.3 机械手的发展趋势 (9)1.4 本设计课题的背景和意义 (9)2 机械手的总体方案设计 (10)2.1 机械手基本形式的选择 (10)2.2 机械手的主要部件及运动 (11)2.3 驱动机构的选择 (12)2.4 传动机构的选择 (12)3机械手的数学建模 (12)3.1 机器人数学基础 (12)3.2 机器人的运动学方程 (13)4 机械手的整体设计计算 (15)4.1 手部设计基本要求 (15)4.2 典型的手部结构 (16)4.3 机械手手指的设计计算 (16)4.3.1 选择手抓的类型和加紧机构 (16)4.3.2手抓加紧力与驱动力的力学分析 (16)4.4 驱动电机的选择 (17)4.4.1 手指张合电机的选择 (17)4.4.2 手腕电机的选择 (19)4.4.3 大手臂摆动电机的选择 (19)4.4.4 小手臂摆动电机的选择 (20)4.4.5 手腕摆动电机的选择 (20)4.4.6 底座转动电机的选择 (21)4.5 涡轮蜗杆、带轮的选择及传动比的确定 (21)4.5.1 底座电机处涡轮蜗杆的传动的确定 (21)4.5.2 大手臂电机处涡轮蜗杆及带传动的确定 (22)4.5.3 小手臂电机处涡轮蜗杆及带传动的确定 (23)4.5.4 手腕摆动电机处涡轮蜗杆及带传动的确定 (24)4.6 小手臂摆动处轴的校核 (25)5 总结与展望 (29)谢辞 (30)[参考文献] (31)附录一科技文献翻译 (32)附录二毕业设计任务书与开题报告 (46)多自由度机械手机械设计1 绪论机械手 (manipulator)是一种能按给定的程序或要求,自动地完成物体(材料、工件、零件或工具等)传送或操作作业的机械装置,它能部分地代替人来进行繁重、危险、重复等手工作业。
聊聊“机械臂”的二三事
聊聊“机械臂”的二三事我们常说的机械臂多指形似人类手臂的串联式多自由度机器人。
它由多个驱动关节通过机器人本体的机械结构依次串联,机器人的末端可以实现空间的多自由度运动。
在末端安装吸盘、机械手、油漆喷嘴等执行器,即可代替人工进行部分高危、高强度的重复工作,现已广泛应用于工业、医疗、教育、娱乐等领域、与我们的生活息息相关。
本文将汇总谈及“机械臂”时必将提到的内容。
一、机械臂的“轴”轴,对应于机械术语中的自由度(Degree of Freedom,DOF),代表了机器人所具有的独立运动坐标轴的数目,通常与机器人使用的电机数量相同。
例如七轴机械臂采用7个电机,通过7个独立运动共同驱动机器人工作。
常见机械臂的“轴”数多为3-7之间,轴数越多,机器人越灵活,但结构越复杂,成本越高。
ABB公司的六轴机械臂(图片来源:ABB)(一)四轴机械臂——SCARA机器人SCARA机器人(Selective Compliance Assembly Robot Arm),也称水平多关节机器人,于1978年由日本山梨大学牧野洋发明。
该机器人具备4个独立的驱动关节,包括3个轴线相互平行的旋转关节和1个移动关节。
3个旋转关节可让机器人在平面内进行定位和定向,移动关节可使末端完成垂直于平面的直线运动。
SCARA机器人结构相对简单,更易于快速运动,适用于快速分拣;在XOY平面具有柔顺性,在Z轴方向具备较好的刚度,也适用于精密装配。
EPSON公司的SCARA机器人(图片来源:EPSON)(二)六轴机械臂——最常见的工业机器人1959年,George Devol和Joseph F·Engelberger发明了世界上第一台工业机器人,功能和人手臂功能相似,并命名为Unimate,意为“万能自动”。
生活中最常见的六轴机械臂就是一种典型的工业机器人,在自动搬运、装配、焊接、喷涂等工业现场有着广泛的应用。
在机械结构上,该机器人具备6个独立的驱动关节,第一个驱动关节可模拟人类的腰转动作,第二、三个驱动关节分别模拟大臂和小臂动作,最后的第四、五、六驱动关节可实现人类手腕的功能,运动灵活,可在其工作范围内可以完成任意定位和定向。
六自由度设计报告

六自由度设计报告引言:六自由度是指物体在空间中具有的六个独立的运动自由度,包括三个平动自由度和三个转动自由度。
在机械设计领域中,六自由度设计是一种常见的设计方法,可以实现物体在空间中的多样化运动。
本文将探讨六自由度设计的基本概念、应用领域以及设计原则,并分析几个典型的案例。
一、六自由度设计的基本概念六自由度设计是指通过合理布置和设计机械装置,使其具有平移和旋转等六个自由度的能力。
其中,平动自由度包括物体在三个坐标轴上的平移能力,而转动自由度则包括物体绕三个坐标轴的旋转能力。
通过控制这些自由度,我们可以使机械装置在空间中实现各种复杂的运动。
二、六自由度设计的应用领域六自由度设计在许多领域都有广泛的应用。
在机器人领域,六自由度机械臂能够模拟人类手臂的运动,广泛应用于装配、焊接、搬运等工作。
在航空航天领域,六自由度设计可以使飞机、卫星等飞行器在空中实现各种姿态的调整和稳定。
在医疗领域,六自由度机器人可以用于手术操作,提高手术的精确性和安全性。
三、六自由度设计的原则六自由度设计需要考虑以下几个原则:1. 功能需求:根据具体的应用需求确定机械装置需要实现的运动自由度和精度。
2. 结构设计:通过合理的结构设计,使机械装置能够灵活地实现各种运动。
可以采用齿轮传动、连杆机构等方式来实现运动的传递和转换。
3. 控制系统:设计合理的控制系统,实现对六个自由度的精确控制和调节。
可以采用传感器和电机等装置来实现控制。
4. 安全性考虑:在设计过程中考虑到机械装置的安全性,避免出现意外事故。
案例分析:1. 机器人装配线:六自由度机器人装配线能够根据产品的不同要求,实现各种复杂的装配动作,提高生产效率和质量。
2. 飞行器姿态控制:六自由度设计可以使飞行器在空中实现各种姿态的调整,提高飞行的稳定性和灵活性。
3. 医疗机器人手术系统:六自由度机器人手术系统可以实现对患者进行精确的手术操作,减少手术风险和创伤。
结论:六自由度设计是一种重要的机械设计方法,具有广泛的应用前景。
国内首台七轴双臂机器人太智能了,任性拒绝撒贝宁求抱!

国内首台七轴双臂机器人太智能了,任性拒绝撒贝宁求抱!
目前市面上比较传统的机械手臂,一般都具备六个自由度,前三个自由度,负责引导夹具到所需要的位置,而后三个自由度,则用来决定末端执行装置的方向,此款七轴机器人,都比市面上其他的产品表现还要来得更优秀。
通常在三度立体空间内,一般机械手臂执行任务时,最多只需要六个自由度便足够,因为超过六个以上的自由度,会产生多余的自由度,因此一般通常不要求机械手臂具备太多自由度。
这款机器人适用于空间有限、对精度要求高的工厂。
它们可以用来进行精密组装、产品包装、抛光以及装卸。
至于七轴机器人,其又被称为冗余机器人。
相比六轴机器人额外的轴允许其躲避某些特定的目标,便于末端执行器到达特定的位置以更加灵活的适应某些特殊工作环境。
事实上,其多出来的冗余自由度不仅可以通过运动轨迹规划达到良好的运动学特性,而且可以实现最佳的动力学性能。
特别是当工业机器人发生故障时,只要有一关节失效,传统六轴机器人便无法继续完成工作,而七轴机器人则可以通过重新调整故障关节速度(运动学容错)和故障关节力矩(动力学容错)的再分配实现继续正常工作。
国产七轴机器人在逐渐实现真正的产品化过程,也在推进着我我国机器人产品向高端产业化迈进的步伐。
而目前无论从产品角度,还是从应用角度,国内的七轴工业机器人虽还处于初步发展阶段,。
六自由度工业机器人

摘要在当今轮毂制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,工业机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用。
工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取示教再现的方式。
本文设计和研究了一个六自由度的工业机器人,用于生产线的进送料和装配。
首先,本文对生产线布局进行改造设计,提高生产的工作效率,然后,根据设计要求设计了机器人的整体方案和具体的机械结构,选择了合适的传动方式、驱动方式,设计了机器人的底座、大臂、小臂和手部的结构;并且对机器人的传动结构进行设计,机器人为六自由度关节型机器人,全部采用转动关节,关节处采用电机,减速机,齿轮传动机构,蜗轮蜗杆传动机构来实现各个自由度,从而实现所需的运动。
在此基础上,本文将设计该机器人的控制系统,采用PC+DSP运动控制卡的控制方式,确定了控制系统的总体方案,设计了PCI 总线接口电路和DSP。
关键词: 六自由度工业机器人;生产线;结构设计;控制系统;各位如果需要此设计的全套内容(包括二维图纸、中英文翻译、完整版论文、程序、答辩PPT)可加QQ695939903,如果需要代做也请加上述QQ,代做免费讲解。
AbstractIn the modern large-scale manufacturing industry, enterprises pay more attention on the automation degree of the production process in order to enhance the production efficiency, and guarantee the product quality. As an important part of the automation production line, industrial robots are gradually approved and adopted by enterprises. The technique level and the application degree of industrial robots reflect the national level of the industrial automation to some extent, currently, industrial robots mainly undertake the jops of welding, spraying, transporting and stowing etc. , which are usually done repeatedly and take high work strength, and most of these robots work in playback way.In this paper ,I will design an industrial robot with six DOFs.First, I will transform line layout and design the structure of the baseto improve the work efficiency of production ,and then, according to the design requirements ,I design the robot mechanical structure of the overall plan and specific ,and chose the right means of transmission and drive mode,Then ,I design the big arm, the small arm and the end manipulator of the robot,and I design the transmission structure, This robot is a 6-DOF joint robot,These joints are all rotary joints, joints used motor, reducer, gear transmission, worm gear and worm drive mechanism to realize various degrees of freedom, so as to achieve the required movement.On this basis, this paper will design the control system of the robot, which controlled by PC and DSP motion control card, and determine the overall scheme of the control system, design DSP and PCI bus interface circuit .Keywords: 6-DOF industrial robot, line layout , structure design, the control system目录摘要 (I)Abstract.............................................................................................................. I I第1章绪论 (5)1.1 课题背景及研究的目的和意义 (5)1.2国内外在该方向的研究现状及分析 (6)1.3 本文的主要研究内容 (8)第2章生产线布局及总体方案的确定 (9)2.1 生产线布局方案 (9)2.1.1机械手 (9)2.1.2 工作流程 (10)2.1.3方案预期达到的目标 (10)2.2总体方案的设计 (11)2.2.1机构的选型 (11)2.2.2驱动方式的选择 (11)2.2.3 传动方案的选择 (12)2.2.4 总体结构方案设计 (13)2.2.5控制方案的设计 (15)2.2.6技术参数列表 (16)2.3 本章小结 (17)第3章结构的设计 (18)3.1 引言 (18)3.2 电机力矩的计算以及驱动电机的选择 (18)3.3减速器的设计 (19)3.4 腰部的设计 (20)3.5 手臂的设计 (20)3.5.1手臂的设计基本要求 (20)3.5.2大臂和小臂 (21)3.5.3连杆 (22)3.6手腕部的设计 (22)3.7末端执行器的设计 (22)3.8本章小结 (23)第4章传动系统的设计及校核 (25)4.1腰部蜗轮蜗杆设计及校核 (25)4.2 腕部传动系统设计及校核 (25)4.2.1传动方案 (25)4.2.2齿轮的设计及校核 (25)4.2.2.1齿轮组设计 (25)4.2.2.2 直齿圆锥齿轮的设计 (25)4.2.3 轴的设计 (25)4.3 本章小结 (27)第5章控制系统设计 (29)5.1 引言 (29)5.2 控制系统的设计 (29)5.2.1 控制系统的类型选择 (29)5.2.2 控制系统的硬件电路 (29)5.3 PCI的接口设计 (30)5.4 DSP的设计 (31)5.4.1 DSP概述 (31)5.4.2 DSP硬件电路 (31)5.4.3 DSP软件 (31)5.5本章小结 (32)结论 (33)参考文献 (34)致谢 (35)第1章绪论1.1 课题背景及研究的目的和意义轮毂制造业属于劳动密集型的行业,除了繁重的体力工作外,几乎每个工序都存在着对人体有害的污染源和潜在的工伤事故:热加工工序烫灼伤的危险,大量易燃易爆燃料及消耗材料时时刻刻威胁着操作手的安全;铝液除气除渣产生的有毒烟尘,机加工冷却液的有害蒸汽,以及涂装工序液体漆、粉漆、前处理药液等等都会严重影响工人的健康;无处不在的轰鸣及刺耳的噪音会使你情绪坏到极点。
七轴柔性多关节工业机器人
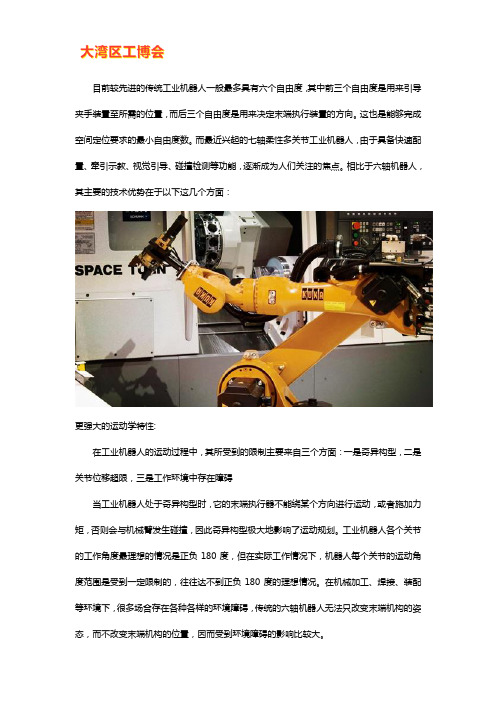
目前较先进的传统工业机器人一般最多具有六个自由度,其中前三个自由度是用来引导夹手装置至所需的位置,而后三个自由度是用来决定末端执行装置的方向。
这也是能够完成空间定位要求的最小自由度数。
而最近兴起的七轴柔性多关节工业机器人,由于具备快速配置、牵引示教、视觉引导、碰撞检测等功能,逐渐成为人们关注的焦点。
相比于六轴机器人,其主要的技术优势在于以下这几个方面:更强大的运动学特性:在工业机器人的运动过程中,其所受到的限制主要来自三个方面:一是奇异构型,二是关节位移超限,三是工作环境中存在障碍当工业机器人处于奇异构型时,它的末端执行器不能绕某个方向进行运动,或者施加力矩,否则会与机械臂发生碰撞,因此奇异构型极大地影响了运动规划。
工业机器人各个关节的工作角度最理想的情况是正负180度,但在实际工作情况下,机器人每个关节的运动角度范围是受到一定限制的,往往达不到正负180度的理想情况。
在机械加工、焊接、装配等环境下,很多场合存在各种各样的环境障碍,传统的六轴机器人无法只改变末端机构的姿态,而不改变末端机构的位置,因而受到环境障碍的影响比较大。
七轴机器人由于增加了一个自由度,比六轴机器人拥有更强的避免形成奇异构型及从奇异构型中调整恢复正常状态的能力;增加的关节使转角可以多分配到一个关节上,每个关节的平均转角减少,有效避免了出现关节位移超限的情况;更高的自由度也更有利于避开工作环境中存在障碍。
这些都使得七轴机器人拥有比六轴机器人更强大的运动学特性。
更卓越的动力学特性:对于七轴机器人而言,利用多出来的自由度不仅可以通过运动轨迹规划达到良好的运动学特性,并且可以利用其结构实现更卓越的动力学性能。
七轴机器人可以对关节力矩进行重新分配,通过一定的算法计算出想要实现力矩平衡,机器人每个关节所要承受的力的大小。
对于传统的六轴机器人来说,其每个关节上的力是一定的,但力作用的力臂和承受能力不同,这样分配的结果可能很不合理。
而七轴机器人可以通过控制算法调整各个关节的力矩,让薄弱的环节承受的力矩尽量小,从而使整个机器人的力矩分配趋于均匀和合理。
机械手臂自由度
机械手臂自由度机械手臂是一种能够执行复杂操作的机器器械,在制造、包装、货物搬运以及建筑等领域得到了广泛的应用。
机械手臂的自由度是其功能的核心特性之一,也是其用途和性能的主要区别。
本文将探讨机械手臂自由度的概念、类型、应用及发展趋势。
一、机械手臂自由度的概念机械手臂自由度指机械手臂能够在空间中移动的自由度数量。
在三维空间中,机械手臂拥有以下六个自由度:横移(X)、纵移(Y)、升降(Z)、绕Y轴(pitch)、绕Z轴(yaw)和绕X轴(roll)。
通过这六个自由度能够实现各种复杂的动作和操作。
二、机械手臂自由度的类型机械手臂通常根据其自由度分为两种类型:固定自由度和可变自由度。
1.固定自由度固定自由度指机械手臂的自由度数量是固定的,不能改变。
通常这种机械手臂用于执行固定的任务,如在工厂流水线上用于包装、分拣和搬运等操作。
2.可变自由度可变自由度指机械手臂的自由度数量可以改变。
这种机械手臂通常配备有各种不同类型的末端工具,如夹子、钳子和吸盘等。
这使得机械手臂能够适应不同的任务并执行不同的操作。
三、机械手臂自由度的应用机械手臂的应用范围非常广泛。
在现代工业领域中,机械手臂被广泛应用于各种场景中,如装配生产线、化工生产过程控制、食品生产、农业、医疗和卫生保健等领域。
通过机械手臂的高效生产,能够提高生产线的效率和品质,减少人力成本,提高工作安全性。
四、机械手臂自由度的发展趋势随着科技的不断发展,机械手臂自由度将会有更多的变革和进步。
机械手臂将会有着更复杂的结构和更强大的工作能力。
机械手臂将追求更广泛的自由度,以更好地适应各种不同的任务。
此外,机械手臂多种智能化技术将会应用到机械手臂上,使机械手臂能够更好地与人类进行交流和协作。
结论机械手臂的自由度是机械手臂的重要特性之一。
机械手臂的自由度分为固定自由度和可变自由度。
机械手臂广泛应用于工业、医疗、卫生保健和农业等领域。
在未来,随着科技的不断进步,机械手臂将越来越智能化和高效化。
工业机器人的自由度
工业机器人的自由度通常作为机器人的技术指标,反映机器人动作的灵活性,可用轴的直线移动、摆动或旋转动作的数目来表示。
机器人机构能够独立运动的关节数目,称为机器人机构的运动自由度,简称自由度(Degree of Freedom),由DOF简写表示。
目前工业机器人采用的控制方法是把机械臂上每一个关节都当作一个单独的伺服机构,即每个轴对应一个伺服器,每个伺服器通过总线控制,由控制器统一控制并协调工作。
IS08373对工业机器人的解释:“机器人具备自动控制及可再编程、多用途功能,机器人操作机具有三个或三个以上的可编程轴,在工业自动化应用中,机器人的底座可固定也可移动”。
可见,工业机器人的轴数是其重要技术指标。
不同自由度的机器人在工业中的应用机器人轴的数量决定了其自由度。
是不是自由度越多越好呢?自由度越多就越接近人手的动作机能,通用性就越好;但是自由度越多,结构越复杂,对机器人的整体要求就越高,这是机器人设计中的一个矛盾。
随着轴数的增加,机器人的灵活性也随之增长。
但是,在目前的工业应用中,用得最多的是三轴、四轴、五轴双臂和六轴的工业机器人,轴数的选择通常取决于具体的应用。
这是因为,在某些应用中,并不需要很高的灵活性,而三轴和四轴机器人具有更高的成本效益,并且三轴和四轴机器人在速度上也具有很大的优势。
如果只是进行一些简单的应用,例如在传送带之间拾取放置零件,那么四轴的机器人就足够了。
如果机器人需要在一个狭小的空间内工作,而且机械臂需要扭曲反转,六轴或者七轴的机器人是最好的选择。
目前在工业领域中以六轴机器人应用最为广泛。
带有六个关节的工业机器人与人类的手臂极为相似,它具有相当于肩膀、肘部和腕部的部位,它的“肩膀”通常安装在一个固定的基座结构上。
人类手臂的作用是将手移动到不同的位置,而六轴机器人的作用则是移动末端执行器,在机械臂末端安装适用于特定应用场景的各种执行器,例如爪手、喷灯、钻头和喷漆器等,去完成不同的工作任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
为什么最好的机械臂是7个自由度而不是6个自由度
现在用的最多的工业机器人,一般都是六轴的,但是推出的人机协作机械臂,却有7个自由度,一直想不明白为什幺。
直到最近看到知乎上的一个问题:人的手臂(腕关节到肩关节)有几个自由度?才发现,原来7个自由度是对人手臂的真实还原。
人的手臂(腕关节到肩关节)有几个自由度?我想绝大部分人都没有想过,更别说去了解有哪几个自由度,即使是学工科的人,也未必能解释清楚。
没想到知乎上居然有人把这个问题回答的这幺专业有内涵,同时又那幺有哲理,忍不住想要把这个答案分享一下。
回答这个问题的是知乎网友杨硕,答案如下:实话说,我对robot manipulation还是挺熟的,但是楼上几个答案一眼看去都看不懂。
不是黑,而是觉得对非专业人士来说不好理解。
我来尽量用通俗的语言解释一下。
首先,问题的答案是:数一下就行了啊!
7个自由度有人问5,6是不是一样的。
5是拧钥匙时唯一要转动的关节,动力来自小臂两根桡骨的扭转;6是把鼠标放在桌面用手转时唯一要转动的
关节,动力来自手腕的旋转。