第三篇(第7,8,9章)模型预测控制及其MATLAB实现
研究生必备的人工神经网络电子书汇总(31本)
研究生必备的人工神经网络电子书汇总(31本)这些都是我从淘宝和百度文库里面搜集到的电子书,需要的可以联系我QQ:415295747,或者登录我的博客/u/17236977421.神经网络在应用科学和工程中的应用——从基础原理到复杂的模式识别5 译者序6 前9 致谢10 作者简介11 目录19 第1章从数据到模型:理解生物学、生态学和自然系统的复杂性和挑战27 第2章神经网络基础和线性数据分析模型72 第3章用于非线性模式识别的神经网络105 第4章神经网对非线性模式的学习166 第5章从数据中抽取可靠模式的神经网络模型的实现205 第6章数据探测、维数约简和特征提取235 第7章使用贝叶斯统计的神经网络模型的不确定性评估276 第8章应用自组织映射的方法发现数据中的未知聚类359 第9章神经网络在时间序列预测中的应用458 附录2.MATLB 神经网络30个案例分析第1章BP神经网络的数据分类——语音特征信号分类23 第2章BP神经网络的非线性系统建模——非线性函数拟合33 第3章遗传算法优化BP神经网络——非线性函数拟合48 第4章神经网络遗传算法函数极值寻优——非线性函数极值寻优57 第5章基于BP_Adsboost的强分类器设计——公司财务预警建模66 第6章PID神经元网络解耦控制算法——多变量系统控制77 第7章RBF网络的回归——非线性函数回归的实现85 第8章GRNN的数据预测——基于广义回归神经网络的货运量预测93 第9章离散Hopfield神经网络的联想记忆——数字识别102 第10章离散Hopfield神经网络的分类——高校科研能力评价112 第11章连续Hopfield神经网络的优化——旅行商问题优化计算124 第12章SVM的数据分类预测——意大利葡萄酒种类识别134 第13章SVM的参数优化——如何更好的提升分类器的性能145 第14章SVM的回归预测分析——上证指数开盘指数预测153 第15章SVM的信息粒化时序回归预测——上证指数开盘指数变化趋势和变化空间预测165 第16章自组织竞争网络在模式分类中的应用——患者癌症发病预测171 第17章SOM神经网络的数据分类——柴油机故障诊断182 第18章Elman神经网络的数据预测——电力负荷预测模型研究188 第19章概率神经网络的分类预测——基于PNN的变压器故障诊断195 第20章神经网络变量筛选——基于BP的神经网络变量筛选200 第21章LVQ神经网络的分类——乳腺肿瘤诊断210 第22章LVQ神经网络的预测——人脸朝向识别220 第23章小波神经网络的时间序列预测——短时交通流量预测230 第24章模糊神经网络的预测算法——嘉陵江水质评价241 第25章广义神经网络的聚类算法——网络入侵聚类248 第26章粒子群优化算法的寻优算法——非线性函数极值寻优255 第27章遗传算法优化计算——建模自变量降维270 第28章基于灰色神经网络的预测算法研究——订单需求预测280 第29章基于Kohonen网络的聚类算法——网络入侵聚类289 第30章神经网络GUI的实现——基于GUI的神经网络拟合、模式识别、聚类2.MATLAB 神经网络仿真与应用章节信息7 目录15 第1章神经网络概述38 第2章感知神经网络64 第3章自组织竞争神经网络106 第4章BP神经网络143 第5章线性神经网络171 第6章径向基函数神经网络196 第7章反馈神经网络及MA TLAB实现228 第8章神经网络预测与控制273 第9章神经网络优化及故障诊断302 第10章图形用户界面设计334 参考文献4.混合神经网络技术7 目录11 第1章绪论26 第2章基础知识43 第3章BP神经网络70 第4章RBF神经网络84 第5章Hopfield神经网络96 第6章随机神经网络114 第7章遗传神经网络158 第8章粒子群神经网络193 第9章模糊神经网络244 第lO章混沌神经网络293 第11章小波神经网络331 第12章神经网络集成356 附录5.神经网络控制(第三版)7 目录13 第1章绪19 第2章神经网络理论基础63 第3章基于神经网络的系统辨识101 第4章神经网络控制142 第5章遗传算法与神经控制179 附录203 参考文献6.脉冲耦合神经网络与数字图像处理丛书题名:智能科学技术著作丛书主要责任者:马义德主题词:神经网络; 数字图像处理出版者:科学出版社ISBN:978-7-03-022389-0出版地:北京出版日期:200807页数:3047 《智能科学技术著作丛书》序9 前13 目录21 第1章脉冲耦合神经网络50 第2章图像滤波及脉冲噪声滤波器77 第3章脉冲耦合神经网络在图像分割中的应用142 第4章脉冲耦合神经网络与图像编码185 第5章脉冲耦合神经网络与图像增强195 第6章脉冲耦合神经网络与图像融合210 第7章脉冲耦合神经网络与形态学245 第8章脉冲耦合神经网络在特征提取中的应用278 第9章脉冲耦合神经网络与数字图像签名技术292 第10章脉冲耦合神经网络与组合决策优化306 第11章脉冲耦合神经网络和小波变换322 参考文献7.混沌系统的模糊神经网络控制理论与方法主要责任者:谭文; 王耀南主题词:混沌学; 应用; 模糊控制; 神经网络出版者:科学出版社ISBN:978-7-03-021258-0出版地:北京出版日期:200805页数:2364 内容简介5 前7 目录13 第1章绪论37 第2章模糊神经网络控制理论基础70 第3章神经网络在混沌控制中的作用83 第4章基于径向基神经网络的非线性混沌控制99 第5章超混沌系统的模糊滑模控制111 第6章不确定混沌系统的模糊自适应控制120 第7章模糊神经网络在混沌时间序列预测中的应用134 第8章混沌系统的混合遗传神经网络控制150 第9章不确定混沌系统的模糊神经网络自适应控制165 第10章基于动态神经网络的混沌系统控制200 第11章基于线性矩阵不等式方法的混沌系统模糊控制223 第12章基于递归神经网络的不确定混沌系统同步245 结束语8. 智能预测控制及其MATLB 实现(第2版)丛书题名:自动控制技术应用丛书主要责任者:李国勇主题词:人工智能; 预测控制; 计算机辅助计算; 软件包出版者:电子工业出版社ISBN:978-7-121-10147-2出版地:北京出版日期:201001页数:3364 内容简介5 前7 目录13 第一篇神经网络控制及其MA TLAB实现13 第1章神经网络控制理论87 第2章MATLAB神经网络工具箱函数160 第3章基于Simulink的神经网络控制系统175 第二篇模糊逻辑控制及其MATLAB实现175 第4章模糊逻辑控制理论208 第5章MA TLAB模糊逻辑工具箱函数237 第6章模糊神经和模糊聚类及其MA TLAB实现267 第三篇模型预测控制及其MATLAB实现267 第7章模型预测控制理论281 第8章MA TLAB预测控制工具箱函数320 第9章隐式广义预测自校正控制及其MA TLAB实现334 附录A 隐式广义预测自校正控制仿真程序清单341 附录B MA TLAB函数一览表347 附录C MA TLAB函数分类索引349 参考文献9. 基于神经网络的优化设计及应用主要责任者:孙虎儿出版者:国防工业出版社ISBN:978-7-118-06282-3出版地:北京出版日期:200905页数:111目录11 第1章绪论11 1.1 优化设计发展概况20 1.2 信号处理的主要方法22 1.3 正交设计方法25 1.4 基于神经网络的立体正交优化设计概述28 第一篇基拙理论篇28 第2章基于小波变换的信号处理28 2.1 小波变换的源起与发展概述30 2.2 小波分析基础34 2.3 小波分析的工程解释35 2.4 基于小波分析的信号处理38 第3章神经网络结构的确定38 3.1 神经网络综论42 3.2 神经网络的基本原理47 3.3 人工神经网络的建模53 3.4 前馈型神经网络57 第4章正交设计法57 4.1 正交设计法的基本内容60 4.2 正交设计法的基本内容60 4.3 有交互作用的正交设计法63 4.4 方差分析法67 第二篇创新篇67 第5章立体正交表67 5.1 建立立体正交表70 5.2 立体正交表的基本性质71 5.3 立体正交试验的误差分析75 第6章立体正交优化设计75 6.1 立体正交优化设计概述77 6.2 立体正交优化设计的建模基础78 6.3 立体正交优化设计的特点79 6.4 立体正交设计的步骤及实现85 第三篇实践篇85 第7章液压振动筛参数优化设计与试验85 7.1 振动筛基本原理89 7.2 试验台设计91 7.3 模拟试验101 7.4 液压振动筛参数的立体正交优化设计108 第8章液压激振压路机的液压振动系统优化108 8.1 液压激振压路机基本原理110 8.2 液压振动轮的模型试验117 参考文献10.神经网络稳定性理论主要责任者:钟守铭; 刘碧森; 王晓梅; 范小明主题词:人工神经网络; 运动稳定性理论; 高等学校; 教材出版者:科学出版社ISBN:978-7-03-02116-2出版地:北京出版日期:200806页数:289内容简介5 前7 目录11 第1章绪论73 第2章Hopfield型神经网络的稳定性97 第3章细胞神经网络的稳定性150 第4章二阶神经网络的稳定性212 第5章随机神经网络的稳定性243 第6章神经网络的应用291 参考文献11. 神经模糊控制理论及应用丛书题名:自动控制技术应用丛书主要责任者:李国勇主题词:神经网络; 应用; 模糊控制出版者:电子工业出版社ISBN:978-7-121-07537-7出版地:北京出版日期:200901页数:3326 目录10 第一篇神经网络理论及其MA TLAB实现12 第1章神经网络理论77 第2章MATLAB神经网络工具箱191 第3章神经网络控制系统218 第二篇模糊逻辑理论及其MATLAB实现220 第4章模糊逻辑理论258 第5章MA TLAB模糊逻辑工具箱295 第6章模糊神经和模糊聚类及其MA TLAB实现327 附录A MA TLAB程序清单334 附录B MA TLAB函数一览表340 附录C MA TLAB函数分类索引342 参考文献12.时滞递归神经网络主要责任者:王林山主题词:时滞; 递归论; 神经网络出版者:科学出版社ISBN:978-7-03-020533-9出版地:北京出版日期:200804页数:254出版说明9 前言13 目录15 第1章概述29 第2章几类递归神经网络模型44 第3章时滞局域递归神经网络的动力行为116 第4章时滞静态递归神经网络的动力行为154 第5章时滞反应扩散递归神经网络的动力行为214 第6章时滞反应扩散方程的吸引子与波动方程核截面的Hausdorff维数估计244 第7章Ляпунов定理的推广与矩阵微分方程的渐近行为研究265 索引13. 神经网络实用教程丛书题名:普通高等教育“十一五”规划教材主要责任者:张良均; 曹晶; 蒋世忠主题词:人工神经元网络; 高等学校; 教材出版者:机械工业出版社ISBN:978-7-111-23178-3出版地:北京出版日期:200802页数:1840001 7 目录0002 5 前言0003 11 第1章人工神经网络概述0004 19 第2章实用神经网络模型与学习算法0005 83 第3章神经网络优化方法0006 98 第4章nnToolKit神经网络工具包0007 135 第5章MA TLAB混合编程技术0008 175 第6章神经网络混合编程案例0009 181 附录2NDN神经网络建模仿真工具0010 194 参考文献14.细胞神经网络动力学主要责任者:黄立宏; 李雪梅主题词:神经网络; 细胞动力学; 生物数学出版者:科学出版社ISBN:978-7-03-018109-1出版地:北京出版日期:200704页数:3334 内容简介5 前7 目录9 第一章细胞神经网络的模型及基本概念30 第二章基本理论60 第三章细胞神经网络的完全稳定性118 第四章细胞神经网络的全局渐近稳定性和指数稳定性176 第五章细胞神经网络的周期解与概周期解242 第六章细胞神经网络的动力学复杂性285 第七章一维细胞神经网络的动力学性质322 参考文献15. 人工神经网络基础丛书题名:研究生用教材主要责任者:丁士圻; 郭丽华主题词:人工神经元网络出版者:哈尔滨工程大学出版社ISBN:978-7-81133-206-3出版地:哈尔滨出版日期:200803页数:2084 内容简介5 前7 目录9 第1章绪论44 第2章前向多层网络86 第3章Hopfield网络110 第4章波尔兹曼机(BM)网络简介131 第5章自组织特征映射网络(SOFM)163 第6章ART网络197 第7章人工神经网络的软件实践和仿真15.智能控制理论及应用丛书题名:国家精品课程教材主要责任者:师黎; 陈铁军; 等主题词:智能控制出版者:清华大学出版社ISBN:978-7-302-16157-8出版地:北京出版日期:200904页数:408目录17 第1章绪论30 第2章模糊控制91 第3章模糊建模和模糊辨识118 第4章神经网络控制227 第5章模糊神经网络259 第6章专家系统301 第7章遗传算法333 第8章蚁群算法351 第9章DNA计算与基于DNA的软计算389 第10章其他智能控制16. 人工神经网络及其融合应用技术∙丛书题名:智能科学技术著作丛书∙主要责任者:钟珞 ; 饶文碧 ; 邹承明∙主题词:人工神经元网络 ; 研究∙出版者:科学出版社∙ISBN:978-7-03-018325-5∙出版地:北京∙出版日期:200701∙页数:1607 目录13 第1章绪论24 第2章前馈型神经网络47 第3章反馈型神经网络58 第4章自组织型神经网络72 第5章量子神经网络81 第6章神经网络与遗传算法103 第7章神经网络与灰色系统123 第8章神经网络与专家系统139 第9章模糊神经网络159 参考文献164 附录Matlab简介17.智能技术及其应用:邵世煌教授论文集∙主要责任者:丁永生 ; 应浩 ; 等∙主题词:人工智能 ; 文集∙出版者:科学出版社∙ISBN:978-7-03-023230-4∙出版地:北京∙出版日期:200902∙页数:573目录15 治学之路,开拓之道117 解析模糊控制理论:模糊控制系统的结构和稳定性分析127 不同模糊逻辑下模糊控制器的解析结构134 一个基于“类神经元”模型的智能控制系统及其在柔性臂上的应用研究142 交通系统的模糊控制及其神经网络实现149 采用遗传算法学习的神经网络控制器164 一种采用增强式学习的模糊控制系统研究169 基因算法及其在最优搜索上的应用191 DNA计算与软计算199 采用DNA遗传算法优化设计的TS模糊控制系统206 DNA计算研究的现状与展望223 混沌系统的一种自学习模糊控制228 用遗传算法引导混沌轨道405 模糊环境的表示及机器人轨迹规划409 多变地形下机器人路径规划415 一个环境知识的自学习方法444 含有模糊和随机参数的混合机会约束规划模型469 基于规则的模糊离散事件系统建模与控制研究491 基于最优HANKEL范数近似的线性相位IIR滤波器设计507 自适应逆控制的异步电机变频调速系统研究514 带有神经网络估计器的模糊直接转矩控制551 基于移动Agent的数字水印跟踪系统的设计和实现573 采用元胞自动机机理的针织电脑编织系统591 语词计算的广义模糊约束及其传播研究598 后记18.人工神经网络原理及应用∙丛书题名:现代计算机科学技术精品教材∙主要责任者:朱大奇 ; 史慧∙主题词:人工神经元网络∙出版者:科学出版社∙ISBN:7-03-016570-5∙出版地:北京∙出版日期:200603∙页数:218目录12 第1章人工神经网络的基础知识44 第2章BP误差反传神经网络76 第3章Hopfield反馈神经网络104 第4章BAM双向联想记忆神经网络117 第5章CMAC小脑神经网络139 第6章RBF径向基函数神经网络155 第7章SOM自组织特征映射神经网络175 第8章CPN对偶传播神经网络190 第9章ART自适应谐振理论210 第10章量子神经网络19.软计算及其应用要责任者:温显斌; 张桦; 张颖等主题词:电子计算机; 计算方法出版者:科学出版社ISBN:978-7-03-023427-8出版地:北京出版日期:200902页数:189前7 目录11 第1章绪论24 第2章模拟退火算法45 第3章人工神经网络93 第4章遗传算法138 第5章支持向量机162 第6章模糊计算20计算智能与科学配方∙主要责任者:冯天瑾 ; 丁香乾∙其他责任者:杨宁 ; 马琳涛∙主题词:人工智能 ; 神经网络 ; 计算 ; 研究∙出版者:科学出版社∙ISBN:978-7-03-020603-9∙出版地:北京∙出版日期:200801∙页数:272前10 目录16 第一章绪论38 第二章产品配方与感觉品质评估65 第三章神经网络与感觉评估99 第四章知识发现与复杂相关性分析154 第五章模式识别与原料分类187 第六章支持向量机方法214 第七章进化计算配方寻优方法243 第八章计算智能的若干哲理256 第九章人机交互智能配方系统278 参考文献287 致谢21.计算智能与计算电磁学主要责任者:田雨波; 钱鉴主题词:人工智能; 神经网络; 计算; 研究出版者:科学出版社ISBN:978-7-03-021201-6出版地:北京出版日期:200804页数:2337 目录11 第1章绪论19 第2章遗传算法基本原理50 第3章遗传算法电磁应用98 第4章模糊理论基本原理122 第5章神经网络基本原理188 第6章神经网络电磁应用235 附录1 计算智能和计算电磁学相关网站236 附录2 相关程序22.脉冲耦合神经网络原理及其应用丛书题名:智能科学技术著作丛书主要责任者:马义德主题词:神经网络; 理论; 应用出版者:科学出版社ISBN:7-03-016657-4出版地:北京出版日期:200604页数:1826 内容简介9 《智能科字技术著作丛书》库11 前15 目录19 第1章神经网络图像处理技术34 第2章PCNN模型及其应用概述49 第3章PCNN在图像滤波中的应用66 第4章PCNN在图像分割中的应用120 第5章PCNN在图像编码中的应用137 第6章PCNN与图像增强152 第7章PCNN与粗集理论、形态学和小波变换182 第8章PCNN的其他应用23.人工神经网络教程主要责任者:韩力群主题词:人工神经元网络; 研究生; 教材出版者:北京邮电大学出版社ISBN:7-5635-1367-1出版地:北京出版日期:200612页数:3307 序9 目录17 第1章绪论38 第2章人工神经网络建模基础63 第3章感知器神经网络100 第4章自组织竞争神经网络143 第5章径向基函数神经网络162 第6章反馈神经网络192 第7章小脑模型神经网络201 第8章支持向量机218 第9章遗传算法与神经网络进化237 第10章神经网络系统设计与软硬件实现267 第11章人工神经系统281 附录A 常用算法的MA TLAB程序298 附录B 常用神经网络源程序340 附录C 神经网络常用术语英汉对照344 参考文献24.神经网络专家系统主要责任者:冯定主题词:人工神经元网络出版者:科学出版社ISBN:7-03-017734-7出版地:北京出版日期:200609页数:3487 目录11 第1章从专家系统到神经网络专家系统22 第2章神经网络设计75 第3章数据的前后处理94 第4章神经网络专家系统中的模糊数146 第5章基于神经网络的知识表示199 第6章机器学习218 第7章基于神经网络的推理251 参考文献254 附录神经网络源程序25.神经网络新理论与方法主要责任者:张代远主题词:人工神经元网络出版者:清华大学出版社ISBN:7-302-13938-5出版地:北京出版日期:200611页数:1259 目录11 第1章概论17 第2章基本概念24 第3章实神经网络的代数算法44 第4章全局最小值分析51 第5章复数神经网络的代数算法61 第6章样条权函数神经网络及其学习算法124 第7章神经网络的统计灵敏度分析26.人工神经网络算法研究及应用主要责任者:田景文; 高美娟主题词:人工神经元网络; 计算方法; 研究出版者:北京理工大学出版社ISBN:7-5640-0786-9出版地:北京出版日期:200607页数:2837 目录9 第1章绪论32 第2章人工神经网络49 第3章改进遗传算法的径向基函数网络方法研究及应用95 第4章小波变换及小波神经网络方法研究及应用140 第5章模糊神经网络方法研究及应用189 第6章改进的模拟退火人工神经网络方法研究及应用235 第7章支持向量机方法研究及应用278 第8章结论281 参考文献27.神经计算与生长自组织网络主要责任者:程国建主题词:人工神经元网络; 计算; 自组织系统出版者:西安交通大学出版社ISBN:978-7-5605-2979-0出版地:西安出版日期:200810页数:242内容简介5 作者简介7 前17 目录23 第1章神经计算概述37 第2章人工神经网络的基本结构及其特性56 第3章神经感知器69 第4章自适应线性元件87 第5章多层前馈神经网络105 第6章径向基函数网络118 第7章古典生长型神经网络135 第8章生长型自组织神经网络158 第9章生长神经元结构及其变种182 第10章外生长型神经元结构206 第11章多生长神经元结构230 第12章双生长神经气网络252 参考文献28.神经计算原理丛书题名:计算机科学丛书主要责任者:(美)科斯塔尼克其他责任者:叶世伟; 王海娟主题词:突然南宫神经元网络; 计算出版者:机械工业出版社ISBN:978-7-111-20637-8出版地:北京出版日期:200705页数:491出版者的话7 专家指导委员会8 译者序9 前12 致谢13 重要符号和算符17 重要缩写词20 目录25 第一部分神经计算的基本概念和部分神经网络体系结构及其学习规则25 第1章神经计算概述40 第2章神经计算的基本概念95 第3章映射网络144 第4章自组织网络168 第5章递归网络和时间前馈网络201 第二部分神经计算的应用201 第6章用神经网络解决最优化问题238 第7章用神经网络解决矩阵代数问题275 第8章使用神经网络求解线性代数方程组318 第9章使用神经网络的统计方法372 第10章使用神经网络进行辨识、控制和枯计435 附录A 神经计算的数学基础497 主题索引29. 人工神经网络与模拟进化计算主要责任者:阎平凡主题词:人工神经元网络; 计算出版者:清华大学出版社ISBN:7-302-10663-0出版地:北京出版日期:200509页数:639出版说明9 前11 第一版前15 目录27 第1章绪论37 第2章前馈网络77 第3章径向基函数网络112 第4章学习理论与网络结构选择166 第5章核方法与支持向量机210 第6章自组织系统(Ⅰ)236 第7章自组织系统(Ⅱ)271 第8章自组织系统(Ⅲ)302 第9章动态信号与系统的处理361 第10章多神经网络集成386 第11章反馈网络与联想存储器424 第12章神经网络用于优化计算441 第13章神经网络中的动力学问题463 第14章误差函数与参数优化方法487 第15章贝叶斯方法505 第16章神经网络在信号处理中的应用552 第17章进化计算概论与进化策略575 第18章遗传算法及其理论分析596 第19章遗传算法的设计与实现619 第20章遗传算法在神经网络中的应用626 第21章遗传算法在作业调度中的应用636 第22章分布估计算法660 索引30.人工神经网络与盲信号处理主要责任者:杨行竣; 郑君里主题词:人工神经元网络; 信号处理; 应用; 人工神经元网络出版者:清华大学出版社ISBN:7-302-05880-6出版地:北京出版日期:200301页数:3997 目录11 第1章绪论33 第2章前向多层神经网络与递归神经网络123 第3章自组织神经网络163 第4章Hopfield神经网络244 第5章模糊神经网络311 第6章遗传算法及其在人工神经网络中的应用337 第7章盲信号处理31.人工神经网络理论、设计及应用(第二版)主要责任者:韩力群主题词:人工神经元网络; 高等学校; 教材出版者:化学工业出版社ISBN:978-7-5025-9523-4出版地:北京出版日期:2000709页数:2437 前9 目录15 1 绪论34 2 神经网络基础知识52 3 监督学习神经网络85 4 竞争学习神经网络121 5 组合学习神经网络133 6 反馈神经网络168 7 小脑模型神经网络178 8 基于数学原理的神经网络207 9 神经网络的系统设计与软件实现220 10 神经网络研究展望223 附录1 常用神经网络C语言源程序254 附录2 神经网络常用术语英汉对照256 参考文献。
第08章 模型算法控制

0.04 −0.008 0.0016 −0.2 Gp = 0.04 −0.008 0.0016 0 −0.008 0.0016 0 0
优化控制: 8.1.3 优化控制:单入单出情形
因而
d T = (1, 0 ) (G TWG + R )−1 G TW = ( 0.9752, −0.0952, 0.1189 ) 1 % 选择反馈校正系数矩阵 f = 1 1
% % % u ( k ) = d T ( ys (k ) − Gp up (k ) − f ε ( k ))
其中
(8.1.18)
d T = (1, 0, L , 0 ) (G TWG + R) −1 G TW
优化控制: 8.1.3 优化控制:单入单出情形
算法8.1.1 (无约束MAC) 算法 Step 0. 获得{h1 , h2 ,L , hN } 。计算 Step 1. 在每个时刻 k ≥ 0 , Step 1.1. 测量输出 y ( k ) ; Step 1.2. 确定
% % % % e0 (k ) = ys (k ) − Gp up (k ) − f ε (k )
其中
T % f = ( f1 , 15)
% e (k | k ) = ( e(k + 1| k ), e(k + 2 | k ),L , e(k + P | k ) )
由题意可知 ⑵ ①
u (−5) = u (−4) = L = u (−1) = 0
k = 0 时,有
y (0) = 0.05 ;
yss = 1, a = 0.1 ,且 ys (0) = y (0) = 0.05 ,则
②取
ys (1) = ays (0) + (1 − a ) yss = 0.905
如何进行MATLAB神经网络的训练和预测
如何进行MATLAB神经网络的训练和预测【第一章】MATLAB神经网络的基础知识神经网络是一种模拟人类神经系统运行方式的计算模型,它通过模拟人类的感知、学习和决策过程,可以对复杂的问题进行处理和求解。
在实际应用中,MATLAB是一个常用的工具来进行神经网络的训练和预测。
本章将介绍MATLAB 神经网络的基础知识,包括神经网络的原理、MATLAB的神经网络工具箱以及神经网络训练和预测的一般步骤。
1.1 神经网络的原理神经网络由神经元(neuron)组成,每个神经元接收多个输入并产生一个输出。
神经网络的基本单元是感知器(perceptron),它由权重、偏置和激活函数组成。
权重决定了输入对输出的影响程度,偏置用于调整输出的偏移量,激活函数用于处理神经元的输出。
通过调整权重和偏置,神经网络可以学习和适应不同的输入输出模式。
常见的神经网络包括前馈神经网络(feedforward neural network)、循环神经网络(recurrent neural network)和卷积神经网络(convolutional neural network)。
前馈神经网络是最基本的神经网络类型,信息只能在网络中的一个方向流动,即从输入层到输出层。
循环神经网络具有反馈连接,可以记忆之前的状态信息,适用于序列数据的处理。
卷积神经网络则主要用于图像和语音等二维数据的处理。
1.2 MATLAB神经网络工具箱MATLAB提供了一个神经网络工具箱(Neural Network Toolbox),用于设计、训练和模拟神经网络。
该工具箱包括多种神经网络类型、各种激活函数、训练算法和性能函数等各种功能模块。
使用MATLAB神经网络工具箱可以方便地进行神经网络的建模和仿真。
在MATLAB神经网络工具箱中,神经网络被表示为一个网络对象(network object)。
网络对象由一系列图层(layer)组成,每个图层由若干个神经元组成。
网络对象还包括连接权重矩阵、偏置向量和训练参数等属性。
模型预测控制
,得最优控制率:
根据滚动优化原理,只实施目前控制量u2(k):
式中:
多步优化MAC旳特点: 优点: (i)控制效果和鲁棒性优于单步MAC算法简朴;
(ii)合用于有时滞或非最小相位对象。 缺陷: (i)算法较单步MAC复杂;
(ii)因为以u作为控制量, 造成MAC算法不可防止地出现稳态误差.
第5章 模型预测控制
5.3.1.2 反馈校正 为了在模型失配时有效地消除静差,能够在模型预测值ym旳基础上 附加一误差项e,即构成反馈校正(闭环预测)。
详细做法:将第k时刻旳实际对象旳输出测量值与预测模型输出之间 旳误差附加到模型旳预测输出ym(k+i)上,得到闭环预测模型,用 yp(k+i)表达:
第5章 模型预测控制
5.1 引言
一 什么是模型预测控制(MPC)?
模型预测控制(Model Predictive Control)是一种基于模型旳闭环 优化控制策略,已在炼油、化工、冶金和电力等复杂工业过程中得到 了广泛旳应用。
其算法关键是:可预测过程将来行为旳动态模型,在线反复优化计
算并滚动实施旳控制作用和模型误差旳反馈校正。
2. 动态矩阵控制(DMC)旳产生:
动态矩阵控制(DMC, Dynamic Matrix Control)于1974年应用在美国壳牌石 油企业旳生产装置上,并于1980年由Culter等在美国化工年会上公开刊登,
3. 广义预测控制(GPC)旳产生:
1987年,Clarke等人在保持最小方差自校正控制旳在线辨识、输出预测、 最小方差控制旳基础上,吸收了DMC和MAC中旳滚动优化策略,基于参数 模型提出了兼具自适应控制和预测控制性能旳广义预测控制算法。
神经模糊预测控制及其MATLAB实现第9章 隐式广义预测自校正控制及其MATLAB实现
(9-
ˆ(k ) ˆ(k 1)K (k )[ y(k ) X ˆ(k 1)] ˆ (k 1) θ(k)可用以下递推最小二乘公式估计
1
4
根据式(7-25)可得n个并列预测器为
y (k 1) g 0 u (k ) f (k 1) E1 (k 1) y (k 2) g u (k ) g u (k 1) f (k 2) E (k 2) 1 0 2 y (k n) g n 1 u (k ) g 0 u (k n 1) f (k n) E n (k n)
(9-2)
分析式(3-45)可知,矩阵G中所有元素g0,g1,…,gn-1都在 最后一个方程中出现,因此仅对式(9-2)的最后一个方程 辩识即可求得矩阵G。
5
2. 矩阵G的求取 由(9-2)式最后一个方程得
ห้องสมุดไป่ตู้
y(k n) g n1u(k ) g 0 u(k n 1) f (k n) En (k n)
第9章 隐式广义预测自校正控制及其 MATLAB实现
9.1 9.2 9.3
单输入单输出系统的隐式广义预测 自校正控制算法 多输入多输出系统的隐式广义预测 自校正控制算法 仿真研究
1
广义预测控制作为一种新型的远程预测控制方法, 集多种算法的优点为一体,具有较好的性能,受到 人们的重视,现有多种修正算法,大体上可分为显 式算法和隐式算法两种,显式算法是先辨识对象模 型参数,然后利用Diophantine方程作中间运算,最 后得到控制律参数,由于要作多步预测, 就必须多次 求解 Diophantine方程,因要经过繁琐的中间运算, 所以计算工作量较大,占线时间太长。隐式算法, 它不辨识对象模型参数,而是根据输入输出数据直 接辨识求取最优控制律中的参数, 因而避免了在线求 解Diophantie方程所带来的大量中间运算,减少了计 算工作量,节省了时间。
预测控制matlab工具箱
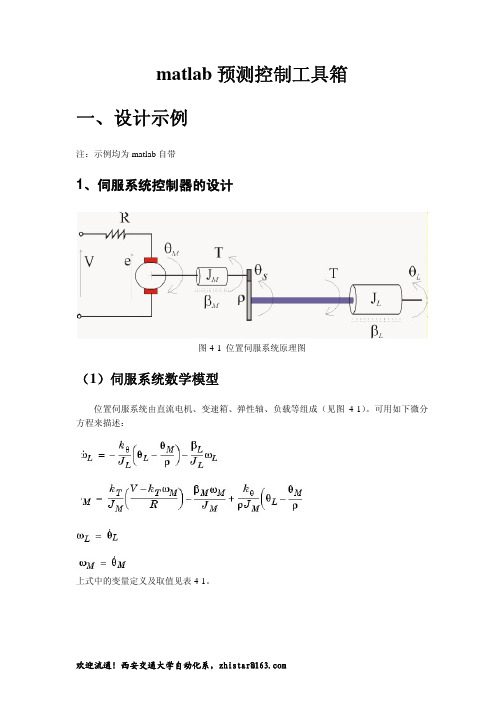
matlab预测控制工具箱一、设计示例注:示例均为matlab自带1、伺服系统控制器的设计图4-1 位置伺服系统原理图(1)伺服系统数学模型位置伺服系统由直流电机、变速箱、弹性轴、负载等组成(见图4-1)。
可用如下微分方程来描述:上式中的变量定义及取值见表4-1。
将上述微分方程写成状态方程形式,有其中,。
(2)控制目标及约束控制目标:在电压V的控制下,使过载角位置跟踪指定值。
输出量仅有可观测。
弹性轴承受的强度有一定的限制,因此对输出力矩T的赋值作一定约束:对输入电压的约束:该系统有一个输入V,两个输出:(可测量)和T(不可测量)。
(3)在matlab中定义该系统的状态空间模型首先需要在matlab中对系统的数学模型进行定义。
可以直接在命令行输入mpcmotormodel(建议做法),也可以在命令行中输入下列命令:% DC-motor with elastic shaft%%Parameters (MKS)%-----------------------------------------------------------Lshaft=1.0; %Shaft lengthdshaft=0.02; %Shaft diametershaftrho=7850; %Shaft specific weight (Carbon steel)G=81500*1e6; %Modulus of rigiditytauam=50*1e6; %Shear strengthMmotor=100; %Rotor massRmotor=.1; %Rotor radiusJmotor=.5*Mmotor*Rmotor^2; %Rotor axial moment of inertia Bmotor=0.1; %Rotor viscous friction coefficient (A CASO)R=20; %Resistance of armatureKt=10; %Motor constantgear=20; %Gear ratioJload=50*Jmotor; %Load inertiaBload=25; %Load viscous friction coefficientIp=pi/32*dshaft^4; %Polar momentum of shaft(circular) sectionKth=G*Ip/Lshaft; %Torsional rigidity(Torque/angle)Vshaft=pi*(dshaft^2)/4*Lshaft; %Shaft volumeMshaft=shaftrho*Vshaft; %Shaft massJshaft=Mshaft*.5*(dshaft^2/4); %Shaft moment of inertiaJM=Jmotor;JL=Jload+Jshaft;Vmax=tauam*pi*dshaft^3/16; %Maximum admissible torqueVmin=-Vmax;%Input/State/Output continuous time form%----------------------------------------------------------AA=[0 1 0 0;-Kth/JL -Bload/JL Kth/(gear*JL) 0;0 0 0 1;Kth/(JM*gear) 0 -Kth/(JM*gear^2)-(Bmotor+Kt^2/R)/JM];BB=[0;0;0;Kt/(R*JM)];Hyd=[1 0 0 0];Hvd=[Kth 0 -Kth/gear 0];Dyd=0;Dvd=0;% Define the LTI state-space modelsys=ss(AA,BB,[Hyd;Hvd],[Dyd;Dvd]);(4)利用MPCTOOL界面设计控制器第一步:导入模型在命令行窗口中输入mpctool,工具箱界面出来后点击Imort Plant…,此时界面如4-2所示。
MATLAB环境下的模型预测控制理论的应用
MATLAB环境下的模型预测控制理论的应用丛爽邓娟(中国科学技术大学自动化系,合肥230027)E-mail:scong@ustc.edu.cn摘要从模型预测控制的原理出发。
介绍利用MA7ⅡAB模型预测控制工具箱进行模型预测控制器设计的全过程。
就被控对象的不同模型。
以及备类模型形式之间的转换做了具体的系统的阐述。
在控刺器的设计过程中,给出不同情况下的控制器的设计方法,并且对控制器设计申的参数选择对系统控制性能的影响进行了分析与总结。
最后通过数值实例说明了如何进行了模型预测控制器的设计。
关键词模型预测控制模型辨识阶跃响应模型系统仿真文章编号l002—8331一(2005)16-0196—03文献标识码A中圈分类号TPl3ModelPredictiveControlTheoryandApplicationunderMATLABEnvironment(Dept.ofAutomation,UniversityofScience&TechnologyofChina,Hefei230027)Abstract:Basedtheprincipleofmodelpredictivecontrol,thepaperintroducesthewholeprocessofmodelpredic—fivecontrollerdesignwithmodelpredictivecontroltoolboxinMATLAB.Systematicallyrepresentthedifferentmodelsofcontrolledplant,aswellastheconversionsofthosemodels.Intheprocedureofthecontrollerdesign,differentcontrollerdesignmethodsintroduced.Atthe8alTletime,theanalysesandconclusionofeffectstosystemcontrolperformanceintheaspectofparametersselection啪done.Atlast.annumericalexampleofthemodelpredictivecontrollerdesignisgiven.Keywords:modelpredictivecontrol,modelidentification,stepresponsemodel,systemsimulation1引言以状态空间法为基础的现代控制理论从20世纪60年代提出到70年代在理论上日趋完善,并且在许多方面得到了成功的运用。
模型预测控制全面讲解..pdf

hT={h1,h2,…,hN} 可完全描述系统的动态特性
主要内容 预测模型 反馈校正 参考轨迹 滚动优化
第三节 模型算法控制(MAC) 一. 预测模型
MAC的预测模型 渐近稳定线性被控对象的单位脉冲响应曲线
y
h11 h2
有限个采样周期后
lim
j
h
j
0
hN
0 12
t/T N
系统的离散脉冲响应示意图第节 模型算法控制(MAC) 一. 预测模型
MAC算法中的模型参数
1─k 时刻的预测输出 2─k +1时刻实际输出
t/T
3─ k +1 时刻预测误差 4─k +1时刻校正后的预测输出
第三节 模型算法控制(MAC)
模型算法控制(Model Algorithmic Control): 基于脉冲响应模型的预测控制,又称模型预测 启发式控制(MPHC)
60年代末,Richalet等人在法国工业企业中应用 于锅炉和精馏塔的控制
1987年,Clarke 提出了基于时间序列模型和在线辨识的 广义预测控制(Generalized Predictive Control, GPC)
1988年,袁璞提出了基于离散状态空间模型的状态反馈预 测控制(State Feedback Predictive Control, SFPC)
第一节 预测控制的发展
反馈校正
在每个采样时刻,都要通过实际测到的输出信息对基于 模型的预测输出进行修正,然后再进行新的优化
闭环优化
不断根据系统的实际输出对预测输出作出修正,使滚动 优化不但基于模型,而且利用反馈信息,构成闭环优化
模型预测控制及其MATLAB实现
模型预测控制及其MATLAB实现模型预测控制(Model Predictive Control, MPC)是一种先进的控制算法,用于处理动态系统的控制问题。
MPC通过在未来的时间范围内优化控制动作序列,以使系统的性能指标最小化,从而实现对系统的优化控制。
MPC的核心思想是建立一个系统模型,然后使用该模型来预测系统的行为,并根据预测结果进行优化控制决策。
具体而言,MPC首先使用系统模型对未来的状态和输出进行预测,然后根据预测结果计算出最优的控制动作序列。
接下来,仅施加最优的第一个控制动作,并在下一个采样时刻重复该过程。
这种迭代优化的过程可以使系统在每个采样时刻都能够进行最优的控制。
MPC的优势在于它可以处理多变量、非线性和时变系统,并且可以轻松地加入约束条件。
此外,MPC还能够在面对不确定性和扰动时提供鲁棒性,以确保控制系统的稳定性和性能。
因此,MPC在多个领域中都得到了广泛的应用,例如化工、能源、机械等。
在MATLAB中,有多种方法可以实现MPC控制算法。
最简单的方法是使用MPC工具箱,该工具箱提供了一套全面的函数和工具,用于建立系统模型、设定控制参数、优化控制决策等。
使用MPC工具箱,可以通过以下几个步骤来实现MPC控制:1.建立系统模型:使用MATLAB的系统建模工具箱,建立系统的状态空间模型或传递函数模型。
2.设定控制参数:根据系统的性能指标和控制目标,设定MPC控制的参数,例如控制时域、控制权重和约束条件等。
3.优化控制决策:使用MPC工具箱提供的优化函数,根据系统模型和控制参数,计算最优的控制动作序列。
4.实施控制动作:根据最优的控制动作序列,施加最优的第一个控制动作,并等待下一个采样时刻。
5.重复步骤3和4:在每个采样时刻,重复步骤3和4,以实现迭代优化控制。
请注意,MPC控制算法的实现还可能涉及其他细节,例如状态估计、鲁棒性设计和性能评估等。
因此,在具体应用中,可能需要根据系统的特点和需求进行相应的调整和扩展。
MATLAB模型预测控制工具箱函数..
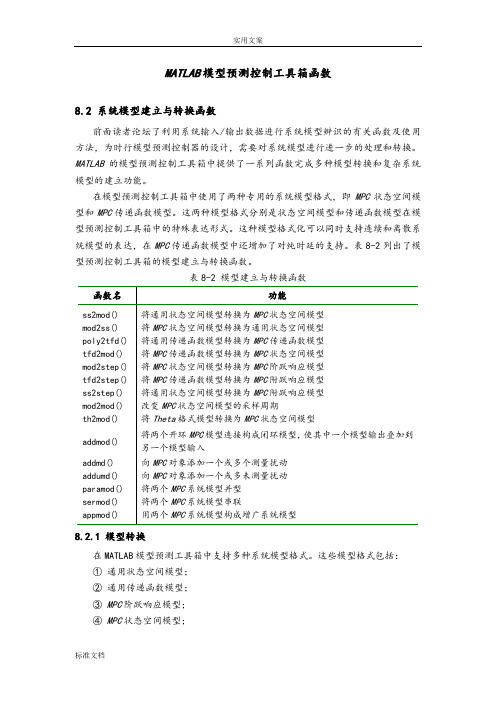
MATLAB模型预测控制工具箱函数8.2 系统模型建立与转换函数前面读者论坛了利用系统输入/输出数据进行系统模型辨识的有关函数及使用方法,为时行模型预测控制器的设计,需要对系统模型进行进一步的处理和转换。
MATLAB的模型预测控制工具箱中提供了一系列函数完成多种模型转换和复杂系统模型的建立功能。
在模型预测控制工具箱中使用了两种专用的系统模型格式,即MPC状态空间模型和MPC传递函数模型。
这两种模型格式分别是状态空间模型和传递函数模型在模型预测控制工具箱中的特殊表达形式。
这种模型格式化可以同时支持连续和离散系统模型的表达,在MPC传递函数模型中还增加了对纯时延的支持。
表8-2列出了模型预测控制工具箱的模型建立与转换函数。
表8-2 模型建立与转换函数8.2.1 模型转换在MATLAB模型预测工具箱中支持多种系统模型格式。
这些模型格式包括:①通用状态空间模型;②通用传递函数模型;③MPC阶跃响应模型;④MPC状态空间模型;⑤ MPC 传递函数模型。
在上述5种模型格式中,前两种模型格式是MATLAB 通用的模型格式,在其他控制类工具箱中,如控制系统工具箱、鲁棒控制工具等都予以支持;而后三种模型格式化则是模型预测控制工具箱特有的。
其中,MPC 状态空间模型和MPC 传递函数模型是通用的状态空间模型和传递函数模型在模型预测控制工具箱中采用的增广格式。
模型预测控制工具箱提供了若干函数,用于完成上述模型格式间的转换功能。
下面对这些函数的用法加以介绍。
1.通用状态空间模型与MPC 状态空间模型之间的转换MPC 状态空间模型在通用状态空间模型的基础上增加了对系统输入/输出扰动和采样周期的描述信息,函数ss2mod ()和mod2ss ()用于实现这两种模型格式之间的转换。
1)通用状态空间模型转换为MPC 状态空间模型函数ss2mod ()该函数的调用格式为pmod= ss2mod (A,B,C,D)pmod = ss2mod (A,B,C,D,minfo)pmod = ss2mod (A,B,C,D,minfo,x0,u0,y0,f0)式中,A, B, C, D 为通用状态空间矩阵;minfo 为构成MPC 状态空间模型的其他描述信息,为7个元素的向量,各元素分别定义为:◆ minfo(1)=dt ,系统采样周期,默认值为1;◆ minfo(2)=n ,系统阶次,默认值为系统矩阵A 的阶次;◆ minfo(3)=nu ,受控输入的个数,默认值为系统输入的维数;◆ minfo(4)=nd ,测量扰的数目,默认值为0;◆ minfo(5)=nw ,未测量扰动的数目,默认值为0;◆ minfo(6)=nym ,测量输出的数目,默认值系统输出的维数;◆ minfo(7)=nyu ,未测量输出的数目,默认值为0;注:如果在输入参数中没有指定m i n f o ,则取默认值。
控制系统的MATLAB计算及仿真
控制系统的MATLAB计算及仿真控制系统是一种用来实现对物理系统或工程系统进行控制的方法和工具。
MATLAB是一种强大的计算机软件包,能够方便地进行控制系统的计算和仿真。
本文将介绍MATLAB在控制系统中的应用,并以一个简单的例子来说明如何用MATLAB进行控制系统的计算和仿真。
首先,我们需要打开MATLAB软件并创建一个新的脚本文件。
在脚本文件中,我们可以使用MATLAB提供的函数来定义控制系统的传递函数和状态空间模型。
例如,我们可以使用tf函数来定义一个传递函数模型。
传递函数是描述系统输入与输出之间关系的一种数学模型。
以下是一个例子:```MATLABs = tf('s');G=1/(s^2+2*s+1);```这个传递函数模型表示一个具有二阶惯性的系统。
我们可以使用step函数来绘制系统的阶跃响应曲线:```MATLABstep(G);```通过运行脚本文件,我们可以得到系统的阶跃响应曲线。
此外,MATLAB还提供了许多其他的函数和命令来计算和仿真控制系统。
另外,我们还可以使用stateSpace函数来定义一个状态空间模型。
状态空间模型是控制系统中另一种常用的数学模型。
以下是一个例子:```MATLABA=[01;-1-1];B=[0;1];C=[10];D=0;sys = ss(A, B, C, D);```这个状态空间模型描述了一个二阶系统的状态方程和输出方程。
我们可以使用step函数来绘制系统的阶跃响应曲线:```MATLABstep(sys);```通过运行脚本文件,我们可以得到系统的阶跃响应曲线。
除了step函数外,MATLAB还提供了许多其他的函数和命令来计算和仿真状态空间模型。
在控制系统中,还常常需要对系统进行参数调节和性能优化。
MATLAB提供了一系列的控制系统工具箱,用于进行控制系统的分析和设计。
例如,Control System Toolbox提供了用于线性系统分析和设计的工具。
实验三利用MATLAB求取状态空间模型的相似变换及其标准型、控制系统的不同状态模型实现

现代控制理论第一次上机实验报告实验三 利用MATLAB 求取状态空间模型的相似变换及其标准型、控制系统的不同状态模型实现实验目的:1、通过实验掌握线性系统的对角线标准型、约旦标准型、模态标准型以及伴随矩阵标准型的表示及相应变换阵的求解;2、通过编程、上机调试,掌握系统可控性和可观测性的判别方法、系统的可控性和可观测性分解等;3、加深理解由控制系统传递函数建立能控、能观、约当标准型等不同状态模型的方法。
实验要求:1.实现同一系统传递函数的状态模型是唯一的吗?2.系统传递函数除上面三种不同状态模型实现外,常见的还有串连实现,对否? 3.对于上述系统传递函数,其输出稳态值与输入阶跃信号幅值有何关系? 实验步骤:1. 根据所给系统的已知条件(可自行参阅选择刘豹教材中的例题或习题),如传递函数、零极点模型或(A 、B 、C 、D ),实现状态空间模型之间的相似变换、写出其对角线标准型、约当标准型、模态标准型以及伴随矩阵标准型的表示及求解相应变换阵,采用MATLAB 的相关函数编写m-文件。
已知系统的传递函数如下:3211()(1)( 2.5)(5)8.52012.5160.270.11 2.55G s s s s s s s s s s ==++++++-=+++++运行如下m-文件,得到传递函数的状态空间模型: num=[0 0 0 1]; den=[1 8.5 20 12.5]; [A,B,C,D]=tf2ss(num,den) 得到 A =-8.5000 -20.0000 -12.5000 1.0000 0 0 0 1.0000 0 B = 1 0 0 C =D =因此,传递函数的一个状态空间实现是G=ss(A,B,C,D);(1)对角线标准型:计算矩阵A的特征值及与特征值对应的对角型变换矩阵D的m-如下:[V,D]=eig(A)[V,D]=eig(A)V =-0.9798 0.9184 0.57740.1960 -0.3674 -0.5774-0.0392 0.1469 0.5774D =-5.0000 0 00 -2.5000 00 0 -1.0000由对角线标准型的变换阵D,运行下列m-文件的到对角线标准型矩阵系数:G1=ss2ss(G,D)a =x1 x2 x3x1 -8.5 -40 -62.5x2 0.5 0 0x3 0 0.4 0b =u1x1 -5x2 0x3 0c =x1 x2 x3d =u1y1 0Continuous-time model.由上可得,对角线标准型:对角型变换矩阵为:(2)约旦标准型:计算矩阵A变换为约当标准型J,并得到变换矩阵V,运行下列m-文件:>> [V,J]=jordan(A)V =2.5000 -1.6667 0.1667-0.5000 0.6667 -0.16670.1000 -0.2667 0.1667J =-5.0000 0 00 -2.5000 00 0 -1.0000根据得到的约当标准型的变换矩阵V,运行下列文件得到约当标准型的矩阵系数:G1=ss2ss(G,V)a =x1 x2 x3x1 -104 -613.6 -697.1x2 21 123.1 139.6x3 -4.2 -24.28 -27.58b =u1x1 2.5x2 -0.5x3 0.1c =x1 x2 x3y1 1 7.5 12.5d =u1y1 0Continuous-time model由上可得,约旦标准型:约旦标准型的变换矩阵为:(3)模态标准型运行以下m-程序可得到模态标准型系数矩阵和其变换矩阵:>> [G1,V]=canon(G,'modal')a =x1 x2 x3x1 -5 0 0x2 0 -2.5 0x3 0 0 -1b =u1x1 -0.825x2 -0.95x3 0.375c =x1 x2 x3y1 -0.1212 0.2807 0.4444d =u1y1 0Continuous-time model.V =-0.8250 -2.8875 -2.0625-0.9500 -5.7000 -4.75000.3750 2.8125 4.6875由上可得,模态标准型:模态标准型的变换矩阵为:(4)伴随矩阵标准型运行以下m-程序可得到伴随矩阵标准型系数矩阵和其变换矩阵:>> [G1,V]=canon(G,'companion')a =x1 x2 x3x1 0 0 -12.5x2 1 0 -20x3 0 1 -8.5b =u1x1 1x2 0x3 0c =x1 x2 x3y1 0 0 1d =u1y1 0Continuous-time model.V =1.0000 8.5000 20.00000 1.0000 8.50000 0 1.0000由上可得,伴随矩阵标准型:模态标准型的变换矩阵为:2.根据所给系统的已知条件(可自行参阅选择刘豹教材中的例题或习题),如(A、B、C、D)模型,判断其可控性和可观测性并进行可控性和可观测性分解。
Matlab中的系统辨识与模型预测控制技术

Matlab中的系统辨识与模型预测控制技术引言Matlab是一种广泛应用于工程和科学领域的高级计算环境和编程语言。
它提供了丰富的工具箱和函数,使工程师和科学家能够进行数据分析、模拟和建模。
本文将探讨Matlab中的系统辨识与模型预测控制(Model Predictive Control, MPC)技术,并介绍其基本原理、应用和优势。
一、系统辨识的基本原理系统辨识是指通过对系统输入和输出数据的分析和处理,来获得对系统动态行为的理解和描述的过程。
在Matlab中,系统辨识工具箱提供了一系列方法和算法来实现系统辨识,其中最常用的方法是基于数据的系统辨识方法。
这些方法根据系统输入和输出的数据样本,通过参数估计和模型拟合来获取系统模型。
在系统辨识中,常用的模型包括线性模型、非线性模型和时变模型等。
线性模型是最简单和最常用的模型类型,它假设系统的行为是线性的,具有参数可调整的特点。
非线性模型考虑了系统的非线性特性,能更准确地描述系统的行为,但参数估计和模型拟合的复杂性也相应增加。
时变模型是指系统参数会随时间变化的模型,能更好地描述实际系统动态行为的变化。
在Matlab中,可以使用系统辨识工具箱中的命令和函数来进行参数估计和模型拟合。
通过对实际系统的输入和输出数据进行采样和记录,然后使用这些数据来拟合和评估系统模型,可以有效地了解和预测系统的行为。
这些模型可以用于系统控制的设计和优化,为工程师和科学家提供决策支持和指导。
二、模型预测控制的基本原理模型预测控制是一种先进的控制技术,它通过预测系统的未来行为来生成控制策略,并根据实际系统的反馈信息进行修正和优化。
在Matlab中,模型预测控制工具箱提供了一系列函数和工具,使工程师和科学家能够轻松地设计和实现模型预测控制算法。
模型预测控制的基本原理是通过建立一个系统模型来预测系统未来的行为,并根据这些预测结果生成相应的控制策略。
通常,系统模型可以使用系统辨识技术获得,也可以采用已知的数学模型。
(完整版)模型预测控制
云南大学信息学院学生实验报告课程名称:现代控制理论实验题目:预测控制小组成员:李博(12018000748)金蒋彪(12018000747)专业:2018级检测技术与自动化专业1、实验目的 (3)2、实验原理 (4)2。
1、预测控制特点 (4)2。
2、预测控制模型 (5)2.3、在线滚动优化 (6)2.4、反馈校正 (7)2。
5、预测控制分类 (8)2.6、动态矩阵控制 (9)3、MATLAB仿真实现 (11)3.1、对比预测控制与PID控制效果 (12)3。
2、P的变化对控制效果的影响 (14)3。
3、M的变化对控制效果的影响 (15)3.4、模型失配与未失配时的控制效果对比 (16)4、总结 (17)5、附录 (18)5.1、预测控制与PID控制对比仿真代码 (18)5。
1。
1、预测控制代码 (18)5.1。
2、PID控制代码 (19)5。
2、不同P值对比控制效果代码 (22)5.3、不同M值对比控制效果代码 (23)5。
4、模型失配与未失配对比代码 (24)1、实验目的(1)、通过对预测控制原理的学习,掌握预测控制的知识点。
(2)、通过对动态矩阵控制(DMC)的MATLAB仿真,发现其对直接处理具有纯滞后、大惯性的对象,有良好的跟踪性和较强的鲁棒性,输入已知的控制模型,通过对参数的选择,来获得较好的控制效果。
(3)、了解matlab编程。
2、实验原理模型预测控制(Model Predictive Control,MPC)是20世纪70年代提出的一种计算机控制算法,最早应用于工业过程控制领域。
预测控制的优点是对数学模型要求不高,能直接处理具有纯滞后的过程,具有良好的跟踪性能和较强的抗干扰能力,对模型误差具有较强的鲁棒性。
因此,预测控制目前已在多个行业得以应用,如炼油、石化、造纸、冶金、汽车制造、航空和食品加工等,尤其是在复杂工业过程中得到了广泛的应用。
在分类上,模型预测控制(MPC)属于先进过程控制,其基本出发点与传统PID控制不同。
神经模糊预测控制及其MATLAB实现第7章 预测控制理论

a1 a n 1
u (k 1) y (k 2) 0 a n m 1 u (k m 1) y 0 (k n)
0
记
ˆ [y ˆ (k 1), y ˆ (k 2),, y ˆ (k n)]T Y
5
7. 1 动态矩阵控制理论
动态矩阵控制是一种基于计算机控制的技术, 它是一种增量算法,并基于系统的阶跃响应,它适 用于稳定的线性系统,系统的动态特性中具有纯滞 后或非最小相位特性都不影响该算法的直接应用。 由于它直接以对象的阶跃响应离散系数为模型, 从而 避免了通常的传递函数或状态空间方程模型参数的 辩识,采用多步预估技术从而能有效地解决时延过 程问题,按使预估输出与给定值偏差最小的二次性 能指标实施控制,因此是一种最优控制技术,动态 矩阵控制算法的控制结构主要由预测模型、滚动优 化和误差校正及闭环控制形式构成。
则(7-7)式可写为
(7-8) 式中 矩阵A为n×m维的常数矩阵,由于它完全由系统 的阶跃响应参数所决定, 反映了对象的动态特性,故称 之为动态矩阵。n,m分别称之为最大预测长度和控制 长度
6
7.1.1 预测模型
从被控对象的阶跃响应出发,对象动态特性用一系 列动态系数 a1 , a2 ,, a p 即单位阶跃响应在采样时刻的 值来描述,p称为模型时域长度,ap是足够接近稳态 值的系数。
图7-1 单位阶跃响应曲线
7
根据线性系统的比例和叠加性质(系数不变原理),若 在某个时刻k-i(k>=i)输入u(k-i),则 u(k i) 对输出y(k)的 1 i p a u (k i) 贡献为: y (k ) i p a u (k i) (7-1) 若在所有 k i(i 1,2,, k ) 时刻同时有输入,则跟据叠加原 p 1 理有 y(k ) ai u(k i) a p u(k p) i 1 (7-2) 利用上式容易得到y(k+j的 n步预估(n<p) 为: (7-3) ˆ (k j ) a u(k j i) a u(k j p) ( j 1,2,, n) y
课件--模型预测控制

h1
h1
h2
PM 1
hi
i1
PM
第三节 模型算法控制(MAC) 二. 反馈校正
以当前过程输出测量值与模型计算值之差修正模型预测值
yP (k j) ym (k j) jy(k) ym (k)
N
ym (k) hiu(k i) i 1
对于P步预测
j 1, 2, , P
YP (k) Ym (k) βe(k)
主要内容 预测模型 反馈校正 参考轨迹 滚动优化
第四节 动态矩阵控制(DMC) 一. 预测模型
DMC的预测模型
渐近稳定线性被控对象的单位阶跃响应曲线
和给定值的偏差来确定当前的控制输入 预测控制:不仅利用当前的和过去的偏差值,
而且还利用预测模型来预测过程未来的偏差值。 以滚动优化确定当前的最优控制策略,使未来 一段时间内被控变量与期望值偏差最小 从基本思想看,预测控制优于PID控制
第二节 预测控制的基本原理
r(k)
+_
d(k)
在线优化 控制器
u(k)
y(k) 受控过程
+ y(k+j| k)
+
模型输出 反馈校正
动态 预测模型
y(k|k)
_ +
三要素:预测模型 滚动优化 反馈校正
第二节 预测控制的基本原理 一.预测模型(内部模型)
预测模型的功能 根据被控对象的历史信息{ u(k - j), y(k - j) |
j≥1 }和未来输入{ u(k + j - 1) | j =1, …, m} ,预测 系统未来响应{ y(k + j) | j =1, …, p} 预测模型形式 参数模型:如微分方程、差分方程 非参数模型:如脉冲响应、阶跃响应
模型预测控制的原理框图

模型预测控制的原理框图模型预测控制(Model Predictive Control,MPC)是一种先进的控制策略,广泛应用于工业过程控制、机器人控制、交通管理等领域。
MPC通过建立数学模型来描述系统的动力学行为,并利用该模型对未来的状态进行预测,从而制定最佳控制策略以实现系统的优化控制。
MPC的原理框图可以分为四个主要部分:模型建立、优化求解、预测和执行控制。
1. 模型建立:MPC首先通过对被控制对象进行系统辨识或基于物理原理建立数学模型。
这个模型描述了被控制对象的状态方程,通常是一个差分方程或微分方程,它可以用来预测系统在未来的演化。
模型建立的难度在于如何准确地捕捉系统的动力学特性,对于复杂的系统往往需要借助于系统辨识方法或先进的建模技术。
2. 优化求解:基于建立好的模型,MPC通过求解一个优化问题来确定最佳控制策略。
优化问题的目标通常是使系统在一定的约束条件下达到预设的性能指标,比如最小化误差、最大化系统稳定性或最优化能耗等。
优化问题的约束包括系统状态的动态约束、控制输入的约束以及性能指标的约束等。
求解优化问题通常需要使用高效的数值优化算法,如线性规划、二次规划或非线性规划等。
3. 预测:MPC根据模型和控制策略,对系统未来的状态进行预测。
预测的时间范围通常是一个预测时段,它是一个有限的时间窗口,通过不断更新预测以适应系统的演化。
预测能够根据当前状态和控制输入来计算系统的未来走势,从而帮助制定最优的控制策略。
4. 执行控制:根据预测的结果和优化求解得到的最佳控制策略,MPC对系统进行控制。
通常在每个控制周期内,根据预测的结果确定下一个控制动作,并把它应用到实际的系统中。
在执行期间,MPC会不断根据实际的测量数据进行状态更新和预测更新,并重新计算最优控制策略。
控制的目标是使系统的实际状态尽可能接近预测的状态,从而实现系统的优化控制。
总结起来,模型预测控制的原理框图包括模型建立、优化求解、预测和执行控制四个主要部分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 u(k) y0 (k 1) (7-7)
u(k 1)
y0
(k
2)
yˆ (k
n)
an
an1
anm1
u(k
m
1)
y0
(k
n)
记
Yˆ [ yˆ(k 1), yˆ(k 2), , yˆ(k n)]T
将式(3-4)写成矩阵形式
( j 1,2, , n)
(7-5)
yˆ(k 1) a1
yˆ (k
2)
a2
a1
yˆ (k
n)
an
an1
u(k) y0 (k 1)
u(k 1)
y0
4
目前提出的模型预测控制算法主要有基于非参数 模型的模型算法控制(MAC)和动态 矩阵控制( DMC),以及基于参数模型的广义预测控制(GPC )和广义预测极点配置控制 (GPP)等。其中,模 型算法控制采用对象的脉冲响应模型,动态矩阵控 制采用对象的阶跃响应模型,这两种模型都具有易 于获得的优点;广义预测控制和广义预测极点配置 控制是预测控制思想与自适应控制的结合,采用 CARIMA模型(受控自回归积分滑动平均模型), 具有参数数目少并能够在线估计的优点,并且广义 预测极点配置控制进一步采用极点配置技术,提高 了预测控制系统的闭环稳定性和鲁输入,预测系统
未来输出值。GPC采用CARIMA模型作为预测模型
,模型CARIMA是"Contrlled Auto-Regressive Integrated
Moving-Average" 的缩写,可以译为“受控自回归积分
滑动平均模型”,这个模型可以写成
13
用Y的最优预测值 Yˆ 中 并令
代替Y,即将式(3-8)代入式(3-10)
J 0 U
得
U ( AT A I )1 AT (W Y0 )
(7-11)
式(7-11)与实际检测值无关,是DMC算法的开环
控制形式。由于模型误差,弱非线性特性等影响,开环
控制式(7-11),不能紧密跟踪期望值,若等到经过m个时
5
7. 1 动态矩阵控制理论
动态矩阵控制是一种基于计算机控制的技术,它 是一种增量算法,并基于系统的阶跃响应,它适用 于稳定的线性系统,系统的动态特性中具有纯滞后 或非最小相位特性都不影响该算法的直接应用。由 于它直接以对象的阶跃响应离散系数为模型, 从而避 免了通常的传递函数或状态空间方程模型参数的辩 识,采用多步预估技术从而能有效地解决时延过程 问题,按使预估输出与给定值偏差最小的二次性能 指标实施控制,因此是一种最优控制技术,动态矩 阵控制算法的控制结构主要由预测模型、滚动优化 和误差校正及闭环控制形式构成。
(7-2)
p 1
(7-3)
yˆ(k j) ai u(k j i) a p u(k j p) ( j 1,2, , n)
i 1
8
由于只有过去的控制输入是已知的,因此在利用动
态模型作预估时有必要把过去的输入对未来的输出贡 献分离出来,上式可写为
j
p1
贡献为:
y(k
)
ai u(k i) a pu(k i)
1i p i p
(7-1)
若在所有 k i(i 1,2, ,k) 时刻同时有输入,则跟据叠加原
理有
p 1
y(k) ai u(k i) a p u(k p) i 1
利用上式容易得到y(k+j的 n步预估(n<p) 为:
这一修正的引入,也使系统成为一个闭环负反馈系统,
对提高系统的性能起了很大作用。
由此可见,动态矩阵控制是由预测模型,控制器和校正 器三部分组成的,模型的功能在于预测未来的输出值,控 制器则决定了系统输出的动态特性,而校正器则只有当
预测误差存在时才起作用。
18
7. 2 广义预测控制理论
十多年来产生了许多自校正器, 都成功地用于实际 过程,但是对变时延,变阶次与变参数过程, 控制效果 不好。因此研制具有鲁棒性的自校正器成为人们关 注的问题。
(7-10)
式中 w(k+j)称为期望输出序列值,在预测控制这类算
法中,要求闭环响应沿着一条指定的、平滑的曲线到
达新的稳定值,以提高系统的鲁棒性.
一般取
w(k j) a j y(k) (1 a j ) yr ( j 1,2, , n)
其中 为柔化系数 0 1 ;y(k)为系统实测输出 值;yr 为系统的给定值。
(7-8)
式中 矩阵A为n×m维的常数矩阵,由于它完全由系统
的阶跃响应参数所决定, 反映了对象的动态特性,故称
之为动态矩阵。n,m分别称之为最大预测长度和控制
长度。
11
7.1.2 滚动优化 系统的模型预测是根据动态响应系数和控制增量来
决定的,该算法的控制增量是通过使最优化准则
n
m
J [ y(k j) w(k j)]2 ( j)u(k j 1)2
Yp0 [y0 (k 1), y0 (k 2), , y0 (k p)]T表示在t=kT时刻预测的无 u(k)作用时的未来p个时刻的系统输出; a [a1,a2, ,ap ]T
为单位阶跃响应在采样时刻的值。
16
由于对象及环境的不确定性,在k时刻实施控制作用
后,在k+1时刻的实际输出y(k+1)与预测的输出
校正后所预测的t=(k+1)T时刻的系统输出;h [h1,h2, ,hp ]T 为误差校正矢量,h1 1 。
17
经校正后的 Y~p 作为下一时刻的预测初值,由于在
t=(k+1)T 时 刻 的 预 测 初 值 , 应 预 测 t=(k+2)T,…,(k+p+1)T
时刻的输出值,故令
y0 (k i) ~y(k i 1)
Richalet等人提出了大范围预测概念, 在此基础上, Clarke 等 人 提 出 了 广 义 预 测 自 校 正 器 , 该 算 法 以 CARIMA模型为基础, 采用了长时段的优化性能指标, 结合辨识和自校正机制, 具有较强的鲁棒性, 模型要 求低等特点, 并有广泛的适用范围。
19
这个算法可克服广义最小方差(需要试凑控制量 的加权系数) 、极点配置(对阶的不确定性十分敏感) 等自适应算法中存在的缺点, 近年来, 它在国内外控 制理论界已引起了广泛的重视,GPC法可看成是迄今 所知的自校正控制方法中最为接近具有鲁棒性的一 种。
3
实际中大量的工业生产过程都具有非线性、不 确定性和时变的特点,要建立精确的解析模型十分 困难,所以经典控制方法如PID控制以及现代控制 理论都难以获得良好的控制效果。而模型预测控制 具有的优点决定了该方法能够有效地用于复杂工业 过程的控制,并且已在石油、化工、冶金、机械等 工业部门的过程控制系统中得到了成功的应用。
15
7.1.3 误差校正
由于每次实施控制,只采用了第一个控制增量Δu(k)
,故对未来时刻的输出可用下式预测。
Yˆp au(k) Yp0
(7-13)
式中 Yˆp [yˆ(k 1), yˆ(k 2), , yˆ(k p)]T表示在t=kT时刻预测的
有 u(k)作用时的未来p个时刻的系统输出;
(i 1,2, , p 1)
(7-15)
由式(3-14), 式(3-15)得下一时刻的预测初值为
y0 (k i) yˆ(k i 1) hi1e(k i)
(i 1,2, , p 1)
y
0
(k
p)
yˆ (k
p)
h p e(k
1)
(7-16)
yˆ(k j) aiu(k j i) aiu(k j i) apu(k j p)
i1
i j1
( j 1,2, , n)
(7-4)
上式右端的后二项即为过去输入对输出n步预估,记为
p1
y0 (k j) aiu(k j i) apu(k j p) i j1
(k
2)
a1
u(k
n
1)
y0
(k
n)
(7-6)
9
为增加系统的动态稳定性和控制输入的可实现性,
以及减少计算量可将 (7-6)变为
向u 量减少为m维(m<n),则式
yˆ(k 1) a1
yˆ (k
2)
a2
a1
刻后,再重复式(7-11),必然造成较大的偏差,更不能抑
制系统受到的扰动。故必须采用闭环控制算式,即仅
将计算出来的m个控制增量的第一个值付诸实施,即
现时的控制增量为
u(k ) cT ( AT A I )1 AT (W Y0 ) d T (W Y0 )
式中 cT 1 0
; 0
d T cT ( AT A I )1 AT
(7-12)
14
如果A,λ都已确定,d 可事先离线解出,在线计算Δu(k) 只需完成两个矢量的点积即可。
可见,预测控制的控制策略是在实施了Δu(k)之后, 采集k+1时刻的输出数据,进行新的预测、校正、优化 ,从而避免在等待m拍控制输入完毕期间,由于干扰等 影响造成失控。因此优化过程不是一次离线进行,而 是反复在线进行的,其优化目标也是随时间推移的, 即在每一时刻都提出一个立足于该时刻的局部优化目 标,而不是采用不变的全局优化目标。