建立一个属于自己的AVR的RTOS
AVR单片机C语言项目开发实践教程项目一 AVR单片机系统开发与设计工具

图2-14 进入调试状态
二、程序编译及下载
1.工程文件的建立与编译
点击全速运行
图2-15 程序全速仿真
二、程序编译及下载
1.工程文件的建立与编译
单步运行查看 单口状态
程序指针
点击单步运行 执行每条语句
图2-16 单步执行后的IO状态
二、程序编译及下载
2.示例程序说明
程序使用芯片ATmega16,频率为8MHz。如使用其他 芯片,需修改模拟调试选项中的芯片型号,并修改程序中 的头文件包含。程序所完成的功能:PC0接一LED。以 2Hz的频率闪烁。
图2-20 程序下载界面
三、AVR单片机软件仿真
如果在没用硬件实训箱,也可以利用软件仿真的形式 进行学习。本书简单介绍Proteus软件。
在单片机学习过程中,同学们更应该实际动手设计、 制作、调试,才能从硬件上真正提高自己的水平。
Proteus软件使用方法参照课本演示步骤进行操作。
AVR单片机(C语 言)项目开发实践 教程项目一 AVR单 片机系统开发与设
计工具
目录
一、WinAVR+AVR Studio软件开发环境使用 二、程序编译及下载 三、AVR单片机软件仿真
一、WinAVR+AVR Studio软件开发环境使用
1.AVR单片机嵌入式系统的开发平台AVR Studio ATMEL公司为开发使用AVR单片机提供了一套免费的
1.工程文件的建立与单步执行语句 单步执行语句或函数 跳出当前函数 运行到光标处 自动单步运行 在当前位置添加断点 取消所有断点 快速查看变量
图2-13 运行工具栏
二、程序编译及下载
1.工程文件的建立与编译
3、MCU运行监视
AVR studio使用指南
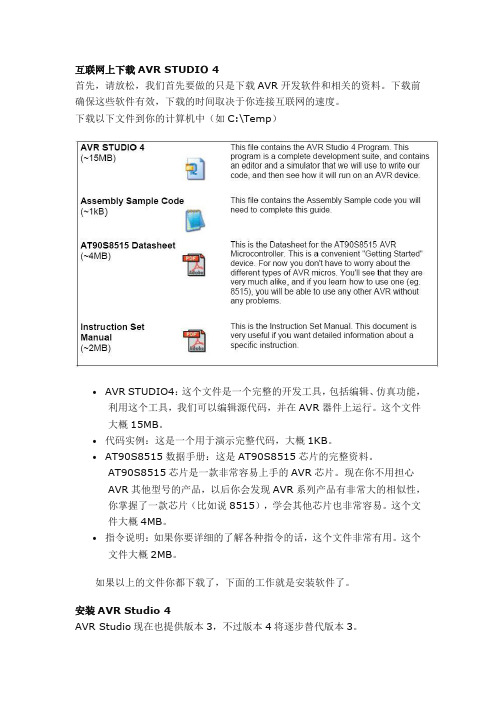
互联网上下载AVR STUDIO 4首先,请放松,我们首先要做的只是下载AVR开发软件和相关的资料。
下载前确保这些软件有效,下载的时间取决于你连接互联网的速度。
下载以下文件到你的计算机中(如C:\Temp)∙AVR STUDIO4:这个文件是一个完整的开发工具,包括编辑、仿真功能,利用这个工具,我们可以编辑源代码,并在AVR器件上运行。
这个文件大概15MB。
∙代码实例:这是一个用于演示完整代码,大概1KB。
∙AT90S8515数据手册:这是AT90S8515芯片的完整资料。
AT90S8515芯片是一款非常容易上手的AVR芯片。
现在你不用担心AVR其他型号的产品,以后你会发现AVR系列产品有非常大的相似性,你掌握了一款芯片(比如说8515),学会其他芯片也非常容易。
这个文件大概4MB。
∙指令说明:如果你要详细的了解各种指令的话,这个文件非常有用。
这个文件大概2MB。
如果以上的文件你都下载了,下面的工作就是安装软件了。
安装AVR Studio 4AVR Studio现在也提供版本3,不过版本4将逐步替代版本3。
使用Windows NT/2000/XP的用户请注意,安装AVR Studio软件时,必须使用管理员(Administrator)权限登陆,这是Windows系统限定只有管理员才可以安装新器件。
安装过程:1.双击AVRSTUDIO.EXE文件。
这是一个自解压文件,双击后系统询问将文件解压到哪个目录底下,一般情况下是放在系统默认临时目录下,这个目录是隐藏在你的硬盘中的。
为了记忆方便,一般输入指定的目录,如C:\temp。
2.当所有文件解压缩完成以后,打开temp目录,双击SETUP.EXE文件。
好了,开始安装了,推荐适用默认的安装路径,当然,用户也可以设定自己的安装路径,但是在指南中,我们使用默认路径。
好了,开发工具安装好了,就这么简单。
现在你可以开始编写代码,在AVR器件上运行了。
注意,将芯片资料和指令说明放在旁边,这些资料以后经常用到。
AtmelStudio-60简易入门教程(精炼实用)
、建议工程文件AtmeIStUdi6.0这个全新的环境使用起来极其不顺手,因为首先我对AtmeIStUdiO以前的版本也根本没有使用经验,就根据很陌生,其次,这个新版本软件还根本没有人用,根本没有任何的相关教程资料,唯一可以参考的只是官网的比较简单的视频教程,还是英文讲解,反正没怎么搞透。
不过还是硬着头皮用下去,因为软件是免费的,而且当后來我知道代码编辑环境其实就是微软VS环境的时候,我就更不犹豫了,大家应该都了解VS的代码编写环境是很智能的,尤其自动补全功能。
现在,我己经能很熟练的使用AtmelSUdio6.0软件了,随若使用我也更加喜欢玩AVR单片机做一些小作品了,而不再用普通51和SrC了。
当使用熟练以后也就感觉到其实这个免费智能的编译环境其实是很简单的,那现在我就帮助更多喜欢使用AVR而没用使用AtmeIStUCliO软件的同学们轻松越过这一个门槛,进入一个美好的编程世界。
该软件的不足之处:一是软件相对较大,打开比较慢,但是运行还是比较顺利的;二是不支持山寨仿真器,这可苦了没钱的劳苦电工们了。
(不过我都是用ISP烧求调试,一般不用仿真)最下而附件有一个简单的LED_test工程文件,编译通过的。
大家可以试用。
下面开始介绍的软件工程的建立。
1. 软件总界面总体界面还是比较简洁的,和其他编译软件都是差不多的,而Jl•和KEIL软件的界面是很相似的,使用很方便。
•SiΛPage・.:m∙Ytvdkl‰dπvΛ⅞r∙Mo<ι曰T W rWV,Mι⅛t×ΛΛfPrqeCtOaQTOd‰WirHRPJj∙4)JfiJr¾ɔ⅛∙'∙';TJ Clo$«NKafterProxet⅛>ad J S*>OWp»®ecoy∣owCUtPHt⅛oαr2. 新建工程新建工程很简单:FlLE->NEW->Project然后就看到下而的新建工程界而了,选择第一个GCCCEXeCUtabIeTS就可以,第二个GcCCStatiCLibrary是用來新建.h文件的。
AVR教程(4):AVRStudio仿真调试快速入门
AVR教程(4):AVRStudio仿真调试快速入门发布: 2010-1-10 12:30 | 作者: tiankai | 来源: 电子园AVR单片机学习专区AVRStudio仿真调试快速入门[p=30, 2, left] ● AVRStudio的安装到 ATMEL 官方: .atmel./dyn/products/tools_card.asp?tool_id=2725 下载安装。
● AVRStudio之建立、打开相关调试文件--使用汇编语言,软件仿真若使用汇编语言进行源代码的编写,由于AVRSTUDIO自带ASM编译器,可以直接建立、打开。
[/p][p=30, 2,left][/p][p=30, 2,left][/p] 接着,进行代码编写,之后按进行编译。
--使用ICCAVR,软件仿真若使用C进行编写,由于AVRSTUDIO不带C编译器,所以需要打开相应的调试文件。
打开*.COF(使用ICCAVR编译器编写源代码)或*.D90文件(使用IAR 编译器编写源代码)。
这类文件与您需要调试的*.C文件所处同一文件夹。
下面以ICCAVR为例,进行介绍。
接着,保存*.aps文件,改文件将记录目标芯片、文件路径等信息。
在打开项目文件的时候,如下图:选择“AVR Simulator”,右边选择实际使用的器件型号,之后点击“Finish”即可进行软件仿真。
选择完成后,即可进行仿真调试了。
[p=30, 2, left] --使用JTAGICE仿真器,硬件仿真与软件仿真不同的是:在打开项目文件的时候,如下图:选择“JTAG ICE”,其它的步骤与软件仿真一致,见上。
[/p]--使用JTAG ICE mkII仿真器,硬件仿真与软件仿真不同的是:在打开项目文件的时候,如下图:选择“JTAG ICE”,其它的步骤与软件仿真一致,见上。
● AVRStudio之调试程序下面简单介绍使用AVRStudio进行仿真调试调试控制栏调试控制栏可以控制程序的执行状态,所有的调试控制都可以由菜单,快捷键和调试工具栏实现。
Linux下的AVR开发环境的建立
*** building gcc. Please change the environment variable *** and run configure again. 用 echo $LIBRARY_PATH 看发现我的 LIBRARY_PATH 变成了 jepg 库的路径(前几天 刚装的)不知道为什么会形象他。然后我把在/etc/profile 里去掉 jpeg 库的查找路径,系 统重启。问题少了很多,但是还是有一个错误:
在 linux shell 里运行一下命令: [root@localhost Atmel]# tar zxvf gcc-core-4.2.2.tar.gz [root@localhost Atmel]# cd gcc-core-3.3.6 [root@localhost Atmel]# ./configure --target=avr --prefix=/usr/local/atmel --disable-nls --enable-language=c --disable-libssp [root@localhost Atmel]# make [root@localhost Atmel]# make install
建立一个属于自己的AVR的RTOS

建立一个属于自己的AVR的RTOS (mega128)2009-09-26 16:46对原作者黄健昌先生表示由衷的感谢,正是这篇文章给我学习嵌入式操作系统铺平了道路,循序渐进、受益良多,由于正在使用mega128做项目,编译器为WinAVR20080610,所以将原文中的实例做了改动,并在开发板上进行了验证。
出于对原作者的尊敬,只对原文做一些必要的改动,基本上维持原貌。
第一篇:函数的运行在一般的单片机系统中,是以前后台的方式(大循环+中断)来处理数据和作出反应的。
例子如下:makefile的设定:运行WinAvr中的Mfile,设定如下MCU Type: mega128Optimization level: sDebug format :AVR-COFFC/C++ source file: 选译要编译的C文件#include <avr/io.h>#include <avr/Interrupt.h>#include <util/delay.h>void fun1(void){unsigned char i=0;while(1){i++;PORTC=0x01<<(i%8);_delay_ms(200);}}int main(void){DDRC=0xFF;fun1();}首先,提出一个问题:如果要调用一个函数,真是只能以上面的方式进行吗?相信学习过C语言的各位会回答,No!我们还有一种方式,就是“用函数指针变量调用函数”,如果大家都和我一样,当初的教科书是谭浩强先生的《C程序设计》的话,请找回书的第9.5节。
例子:用函数指针变量调用函数#include <avr/io.h>#include <avr/Interrupt.h>#include <util/delay.h>void fun1(void){unsigned char i=0;while(1){i++;PORTC=0x01<<(i%8);_delay_ms(200);}}void (*pfun)(); //指向函数的指针int main(void){DDRC=0xFF;pfun=fun1; //(*pfun)(); //运行指针所指向的函数}第二种,是“把指向函数的指针变量作函数参数”#include <avr/io.h>#include <avr/Interrupt.h>#include <util/delay.h>void fun1(void){unsigned char i=0;while(1){i++;PORTC=0x01<<(i%8);_delay_ms(200);}}void RunFun(void (*pfun)()) //获得了要传递的函数的地址{(*pfun)(); //在RunFun中,运行指针所指向的函数}int main(void){DDRC=0xFF;RunFun(fun1); //将函数的指针作为变量传递}看到上面的两种方式,很多人可能会说,“这的确不错”,但是这样与我们想要的RTOS,有什么关系呢?各位请细心向下看。
从零开始全面打造avr开发平台(avrgccide)
从零开始全面打造avr开发平台(avrgccide)本文讨论如何大造一个适合自己的软硬件开发环境,主要介绍avrgcc的windows下的集成开发环境avrgccide的使用及一些必备的硬件工具。
1,软件环境当前,常用的avr的编译器有atmel的avrstudio,iaravr,iccavr,codevisionavr,avrgcc,还有基于bas的几种软件。
调试器有avrstudio,iaravr,avrgcc,其他两种软件没有自己的调试器。
Iaravr,iccavr,codevisionavr都是商用软件,使用要支付大量的费用。
尤其是iaravr费用很高不是普通爱好者能够接受的。
(盗版例外)avrgcc是gnu组织开发的免费软件,功能强大,免费的资源较多,是我们学习的好选择。
但是使用较为复杂,入门很难。
有没有办法让使用avrgcc变得容易,avrgccide就是在这种环境下开发出来的,它可以让使用avrgcc像其他如iccavr一样简单,并且它集成在线下载器,可以让你的思想马上转变为现实,集成超级终端让您调试串口更为容易。
调试可通过它产生的.cof与avrstudio无缝结合或生成elf文件用avr-gdb调试(太繁琐不建议)。
目前它是免费的。
(关于avrgccide可以与mcu598@讨论) 2,安装avrgccide下载avrgccide包解压,双击setup安装,下一步,下一步直到安装完毕,下载最新的avrgccide解压覆盖同名文件,安装完成。
3,创建项目启动avrgccide,选择new project,选择工程目录输入工程名保存,添加文件(这里介绍的是usbasp的编译,以后还要使用这个usb的下载线呢—mega8的软件实现usb)。
下载usbasp包,将fireware目录下的文件解压倒您的工程目录。
将鼠标移到avrgccide的工程栏右击鼠标,将所有的.c,.s文件添加到工程。
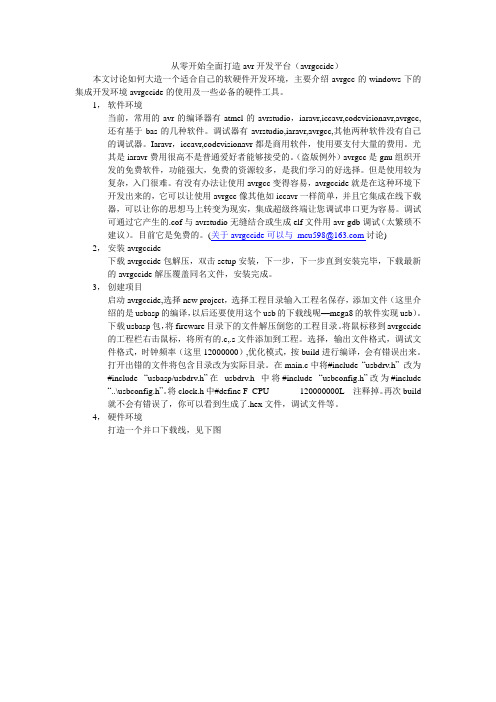
简单方便自制的几个AVR-51 isp编程器(下载线)
简单方便自制的几个AVR/51 ISP编程器(下载线)AVR单片机有许多优点,我也是个忠实支持者,是从51过度到AVR的,中途还学PIC,初学51时买了学习板,液晶屏等不少东西,有经验后,学AVR时就从自制的下载线开始了,注意,这只是个开始,简单的东西总存在着一些局限性,但对于初学者来说,这可是个非常有用的东西,有了它就可以开始学习AVR单片机,甚至是一些开发了,这些编程器都是出自网上流传的,虽然我也不是很清楚出自那位高人,但感谢原作者.以下分享我的自制经验.1.由于AVR的编程方式有并行高压和串行ISP (In System Program 在系统编程)方式,高压并行编程能修复一些错误的配置位,但这并不常用,因为并行通信其布线会较多,不便于在成品中预留编程接口,也不便自制,而串行的ISP是基于SPI(Serial Peripheral interface)通信方式的,SPI通信时只需三根数据线, 分别是SCK,MISO,MOSI,再加上VCC,GND,Reset共需6根线,而VCC是可选的,用于向目标芯片供电,或由目标板反供电给编程器.那么设计目标板时,最少只要保留6根线,以后就可随时烧写,升级芯片上的程序了.而无需将芯片取下.这是ISP方式的最大特点,具体6根线连到那个引脚,不同型号不一样,要看芯片引脚定义图,例如ATtiny2313引脚定义如下:至于编程接头,尽可能以官方的10针接口为准,也可像我一样自定义一个6针的,因为我更喜欢水晶头,其实都是排列不同而已,只要再制作一条线进行转换就什么都搞定了.2.基于并口的ISP下载线,我最初也是自制了这款,这种下载线可以下载AVR全系列和AT89S系列51单片机,成本较低,不过需要PC机有并行口,许多笔记本电脑现在都没有并口了,比较麻烦,市场上卖的USB转并口,大都是用于打印机的,无法使用.以上是原理图,74HC244是用于信号的隔离驱动的,它从目标板经4148供电,由于ISP编程器只有4根是信号线,实际上我用了74HC125取代74HC244,以减小体积和引脚焊点数.下面是我使用的原理图,和成品图片:元件全装在内部,整体就很美观了,注意下载线不宜过长,最好50cm以内,PC上位机软件很多都可以支持的像双龙的SLISP,PonyProg2000(但51的型号很少,2.0a 版中也只有两个),智峰的progisp试过都成功烧写和效验.不足是烧写速度偏慢,综合来说还算满意.如果首次不成功,可能是软件设置问题,双龙的几乎不用(或说是不能)作什么设置,PonyProg200和Progisp或许需要设置一下才能把它使用得更好,比如Ponyprog用直接IO方式要比API方式快些,而Progisp它的端口引脚是可以自定义的,如果不同,把它设为和原理图一样不可以了.否则根本就用不了.3.基于串口的ISP下载线.,因为之前还在用51做些板子,初看这电路时,觉得由于reset在默认上拉,认为不适合51系列(51是高电平复位),并且更重要的是ponyprog2000的器件列表也没 89s52这型号,所以一直没去做过.但如果只对AVR编程来说,这个也是非常好用的.其中6,7端口必须直连,Ponyprog程序用来检测是否插入此接口,制作完成后试过还可以,速度和并口的差不多,只是必须要用PC机上的物理串口,用USB转串口的就无法使用.我起初觉得可能是驱动能力问题,曾用74HC125对它隔离驱动,花了时间却不成功,用示波器观察四条线的时序,发现原来是USB转串口线有问题,它的SCK(7脚),输出像随机的方波,而从物理串口出来的SCK时序,其频率在20K 左右,并连续稳定,如下图,这也许是USB转串口芯片的问题,才20K频率,难道被当燥声给滤掉了??请有了解的朋友请帮我分析一下,但这条转换线是好的,目前正在用它为ARM系统进行通迅,下载都很正常,芯片型号没打开看,驱动名称是Prolific USB-to-Serial Comm Port.有WHQL的,应该没问题,下面是我的原理图(我参考并口那个画的),实物,与波形.示波器测量时是直接测量转接口,未接下载线,通道1(绿)是物理串口的,通道2(黄)就是USB转串口的,已用示波器量了9个脚,不会错的,由于目前在学ARM9系统,已对这些问题放低了,对它有研究的朋友请告诉小弟,解决这小点问题,可以把它当USB的编程器用了!此线直接插到物理串口上,仍然可用.4.当制作完成这样简单的编程器后,就可以开始学习AVR或8051单片机了,熟悉后可以制作一个USB接口的编程器,USBASP,它内部是用一块ATMega8单片机来模似USB时序的,所以制作它的前提是至少需要一个编程器,例如上面的,将程序写入单片机中.这最好是在熟悉AVR的情况下制作.我是根据网上的公板图自己重画了这张原理图,来方便自己制作.晶振必须为12MHz,否则不可能完成USB时序的模似,单片机可以用低压版的ATMega8L 8PU超频使用,USB的数据线上的电压是3.3V,最高不超过3.6伏,那两个稳压管也就必须是3.6伏的,至于其它元件,其取值有些偏差影响也不大,JP1跳线是强制低速工作的,比如烧写那些有内部有RC振荡的单片机,首次使用就可能要用低速模式,因为其默认就是使用1M的内部振荡.由于USB供电已足够使用,JP5通常保持断开就可以了,JP3只在烧写或更新此编程器固件时使用,平时必须断开,整个电路其实很少东西,JP2连接USB线,或USB公头时要注意顺序不要搞错,上面这个PCB是专为万用板,有人叫洞洞板画的,并且4个LED位置是焊插针的,用来引出到外壳,这个单片机是直插的,建议不要焊上去,而是使用IC插座,当把电路做完,用表量一下确认无误后,插入USB口,此时PC端应该提示为无法识别的USB设备,不必理会,接着开始烧写固件,先短接JP3,再用另一个编程器通过编程口将程序写入Mega8单片机.此过程和平时烧写目标板是一样的.确认成功烧写和效验后,接着烧写熔丝位,这步主要就是设置单片机为外部晶振工作模式,设置熔丝时要小心,如果点错的话,先点恢复默认,再去修改.否则后果难以意料.下面分别是Ponyprog,progisp和SLISP的熔丝设置界面:注意不要设错,完成后将JP3取下,拔下并重插USB,如无意外,你会看到发现新硬件这样的提示,然后装USB驱动,就算大功告成了.至于软件目前就智峰的Progisp支持得比较好.因为经常用,最好是搞外壳保护它,我是在壳体店买的小盒,总之都是小问题了.那个低速开关我是用另一个8脚的单片机.实现按键检测,电平求反输出,和将状态保存到片内EEPROM进行记忆来实现的自锁开关,因为这是我后来扩展的,并且是用了PIC的12F629单片机,这些用AVR单片机(如Tiny13)实现都很简单,就不多说了,不过想它反应得好些要下些功夫,或者是直接用机械的自锁开关来实现.至此,可以慢慢享受自己的成果所带来的乐趣了.USBASP制作资料已打包,有兴趣的朋友可下载学习研究:(用浏览器打开,单线程下载)/self.aspx/.Public/MCU/u sbasp.rar。
AVR单片机项目开发实践教程项目一AVR单片机系统开发与设计工具
AVR单片机项目开发实践教程项目一AVR单片机系统开发与设计工具1.硬件工具准备首先,我们需要准备一些硬件工具来进行AVR单片机的开发。
常见的硬件工具包括:-AVR单片机开发板:包含一个AVR单片机芯片、外部电路和接口等。
-调试器:用于调试和监视AVR单片机芯片的运行状态。
2.软件工具准备- WinAVR:是一个开源的C语言编译工具链,可以将C语言源代码编译成可执行的机器码。
3.项目开发实践接下来,我们将以一个简单的LED闪烁项目为例,介绍AVR单片机的项目开发实践。
步骤1:硬件连接首先,将AVR单片机芯片插入开发板中,并将开发板与计算机通过编程器连接。
确保连接稳定和可靠。
步骤2:编写代码```c#include <avr/io.h>#include <util/delay.h>int main(void)DDRB,=(1<<DDB0);//设置PB0引脚为输出while (1)PORTB,=(1<<PB0);//将PB0引脚设置为高电平_delay_ms(1000); // 延时1秒PORTB&=~(1<<PB0);//将PB0引脚设置为低电平_delay_ms(1000); // 延时1秒}return 0;```步骤3:编译代码使用AVR Studio或WinAVR等工具,将C语言源代码编译成可执行的机器码。
编译成功后,将生成一个.hex文件。
步骤5:调试和测试使用调试工具,对AVR单片机程序进行调试和测试。
可以监视变量的值、跟踪代码的执行过程,以及分析程序的性能和效率。
AVR单片机实时操作系统AvrXRTOS.doc
AVR单片机的RTOS-AVRX应用摘要:详细介绍AVR系列单片机的专用实时嵌入式操作系统AVRX的特点,并以ATmega16单片机为平台,结合AVR单片机应用实例分析AVRX的内核代码及移植方法,并对系统的相关性能进行测试。
采用AVR X可以大大简化程序设计,满足实时要求,降低编程难度,提高系统可靠性。
本文为在AVR单片机上进行嵌入式系统开发提供了参考。
关键词: RTOS AVRX AVR单片机移植系统测试引言随着技术的发展,嵌入式系统的设计及应用对人们的生活产生了很大的影响,并将逐渐改变人们未来的生活方式。
在特定的操作系统上开发应用程序,可以使开发人员忽略掉很多底层硬件细节,使得应用程序调试更方便、易于维护、开发周期缩短并且降低开发成本,因而嵌入式操作系统深得开发人员的青睐。
AVR微处理器是Atmel公司开发的8位嵌入式RISC处理器,它具有高性能、高保密性、低功耗、非易失性等优点,而且程序存储器和数据存储器可独立编址,并具有独立访问的哈佛结构。
AVR单片机内核有丰富的指令集,通过32个通用寄存器直接与逻辑运算单元相连接,允许在一个周期内一条单一指令访问两个独立的寄存器,这样的结构使代码的执行效率比传统的复杂指令集微处理器快了将近lO倍。
AVRX是由lbarello编写的源码公开的嵌入式操作系统,它专门针对AVR系列单片机的RTOS,具有免费和可以修改的特点。
它的缺点是由于做为一种专用的操作系统很难移植到其他平台上。
1 AVRX系统的特点AVRX做为AVR专用RTOS有如下的特点:◆完全支持占先式、优先级驱动的任务调度算法;◆16个优先级,相同的优先级的任务采用Round-robin调度算法轮流执行;◆信号量可以用于信号传递、同步和互斥信号量,支持阻塞和非阻塞语法;◆任务之间可以用消息队列相互传递信息,接收和确认消息可以用阻塞和非阻塞调用;◆在中断子程序中,大部分非阻塞的中断服务程序可以使用;◆支持单个定时器的时间队列管理,任何进程都可以设置一个定时器,并且任何一个任务都可以等待定时器时间到;◆支持单步调试运行着的进程;◆程序空间小,包含所有功能的版本占用1000字节;◆与定时器/计数器有关的一些事务可以用AVRX写成任务级代码。
实现FreeRTOS系统傻瓜编程

傻瓜实现FreeRTOS系统如果你1.希望修改FreeRTOS源代码2.移植实时内核到另一个微控制器或者原型板(prototyping board)3.第一次接触FreeRTOS,希望得到关于它们在操作和实现上的更多信息这些文档会有用。
本文档分为两个章节:1.基本原理和RTOS概念包括多任务的背景信息和基本实时概念,这是为初学者准备的(is intended for beginners)2.从底向上(from the bottom up)解释实时内核源代码FreeRTOS实时内核已经移植到许多不同的微控制器架构下。
这份文档是以Atmel AVR为范例,因为:1.AVR架构简单2.有免费可用的开发工具WinAVR (GCC) development tools.3.非常便宜的原型板STK500 prototyping board在本文的最后,还一步一步地详细描述了一个完整的上下文切换(context switch)。
RTOS基本原理多任务调度上下文切换实时应用实时调度这一节提供一个关于实时和多任务概念的简介。
读下一节之前必须理解这些概念。
多任务(Multitasking)在一个操作系统内部,内核[kernel]是最核心的部件。
像Linux那样的操作系统使用的内核,从表面上看(seemingly),允许用户并发(simultaneously)访问计算机。
多个用户似乎(apparently)可以并行(concurrently)执行多个程序。
在操作系统的控制下,每个正在执行的程序就是一个任务[task]。
如果一个操作系统能够以这种方法执行多个任务,这就叫做多任务[multitasking].多任务操作系统的使用可以简化应用程序的设计:1.操作系统的多任务和任务间通信的机制允许复杂的应用程序被分成一系列更小的和更多的可以管理的任务。
2.(程序的)划分(partitioning)让软件测试更容易, 团队工作分解(work breakdown within team s),也有利于代码复用。
AVR Studio 6使用初始设置
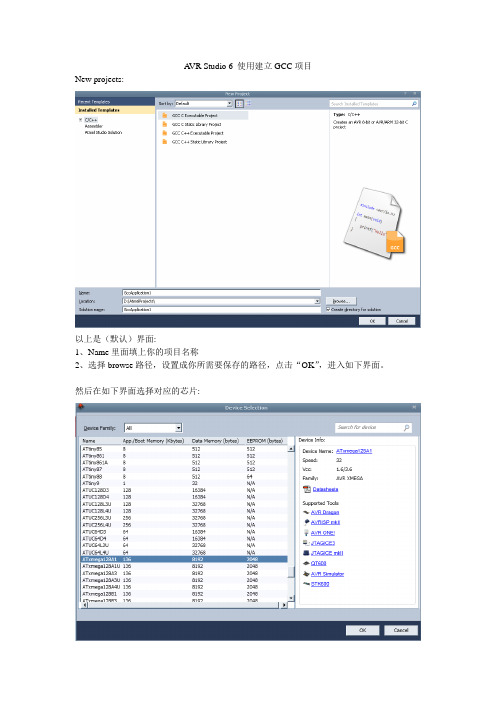
A VR Studio 6 使用建立GCC项目New projects:以上是(默认)界面:1、Name里面填上你的项目名称2、选择browse路径,设置成你所需要保存的路径,点击“OK”,进入如下界面。
然后在如下界面选择对应的芯片:点击“OK”有些视力不好的朋友可能需要设置字体:1.字体和TAB键的设置。
由于AVR Studio 6采用Visual Studio 2010外壳,所以这部分的设置和VS完全相同。
选择tools->options,打开相应的选项卡即可。
字体设置图1 字体设置TAB设置由于在不同的编辑器中TAB键的长度不同,所以我个人习惯插入Space即空格!这样在记事本打开的代码的话就稍微好看一点!图2 TAB键设置2.时钟设置这个是非常有必要的如果要使用AVR Studio内部自带的软件延时函数,则必须要定义时钟频率。
若不定义,默认为1000000MHZ。
选择project->properties图3 时钟频率设置3.头文件设置一般需要包含C代码头文件,但是在一些移植工程中还需要包含汇编代码头文件。
这些路劲的设置是告知编译器从哪个目录寻找头文件。
图4 C代码头文件路径设置图5 汇编代码头文件路径设置1、在项目里添加文件:一般只需要添加C源程序文件,头文件不需要。
其它文件例如说明之类的可视情况添加,这样的话可以快捷地打开查看。
方法:右键点击项目名称,我这里是“controller_CANbootloader”,选择“添加”--“现有项”然后找到要添加的C文件。
注意按添加按钮时要按右边的小三角形选择“添加为链接”。
否则将会把文件拷贝到项目目录下。
2、设置头文件路径右键点击项目名称,我这里是“controller_CANbootloader”,选择“属性”点带绿色加号的按钮,然后去找到存放头文件的路径。
3、设置晶振频率在“属性”里:我这里是16M4、添加自定义库,如果有的话在“属性”里:我这里有3个,原来的m不管它,保留。
linux上的avr开发环境

linux上的avr开发环境(2007-04-18 15:14:38)转载▼标签:linux上的avr开发环境打造Linux下的avr系列单片机编程环境这也是交叉编译环境的建立过程我们所需要的软件:1、binutils-2.14.tar.bz2 ftp:///gnu/binutils2、gcc-core-3.4.0.tar.bz2 ftp:///gnu/gcc/gcc-3.4.03、avr-libc-20020203.tar.gz http://www.amelek.gda.pl/avr/libc4、uisp-20040311.tar.bz2 /download/uisp我是在redhat9.0下安装的,别的版本没有试验过,不过应该不会有太大的问题:把上面四个软件包下载到一个目录下,比如我以root用户来安装它们,下载到/root/tmp目录里,进入/root/tmp目录:cd /root/tmp首先安装binutils-2.14.tar.bz2,解压文件:tar jxvf binutils-2.14.tar.bz2这里得到解压后的目录binutils-2.14gnu推荐新建一个目录来安装它:mkdir binutils-buildcd binutils-build../binutils-2.14/configure --target=avr --prefix=/usr/localmakemake install这样,在/usr/local/avr目录下安装了binutils的软件,让新安装的库加入系统的搜索路径:echo "/usr/local/avr/lib" >>/etc/ld.so.conf/sbin/ldconfig然后安装gcc-core-3.4.0.tar.bz2,步骤和上面的一样,也新建一个目录来安装:tar zxvf gcc-core-3.4.0.tar.gzmkdir gcc-buildcd gcc-build../gcc-3.4.0/configure --target=avr --prefix=/usr/local --disable-nls --enable-language=cmakemake install设置一些环境变量(bash shell) :export CC=avr-gccexport AS=avr-asexport AR=avr-arexport RANLIB=avr-ranlibexport PATH=/usr/local/atmel/bin:$PATH接下来安装avr-libc-20020203.tar.gz,这个不新建目录安装了:tar zxvf avr-libc-20020203.tar.gzcd avr-libc-20020203./configure --prefix=/usr/local/avr --target=avr --enable-languages=c --host=avrmakemake install上面的库会被安装在/usr/local/avr/avr/lib里,这样我们应该把它加入到系统的库搜索路径中:echo "/usr/local/avr/avr/lib">>/etc/ld.so.conf/sbin/ldconfig编程环境到此已经全部安装完毕,可以进行测试了:cd /usr/local/avr/bincat > ./hello.c <<"EOF"main(){printf("Hello,World!");}EOF/usr/local/avr/bin/gcc -o hello hello.c如果幸运的话,不会出现错误,表明上面的软件都安装成功了,要是不幸运出错了请检查一下上面的步骤,一般是没把/usr/local/avr/avr/lib加入到/etc/ld.so.conf并用/sbin/ldconfig让它生效。
AVR开发前准备-【icc + AVRStudio】开发环境配植

1、关于窗口设置:[如图]如上图:这是ICC avr 6.31 版本的窗口,分为5大区。
菜单项1文件▪新建,打开,打印文件等常规选项。
很别扭的一件事关闭文件在菜单里。
1编辑▪复制,粘贴,删除,撤销,重做等常规操作,一看就明白。
1搜索▪搜索功能,书签功能,可以使用添加标签,删除标签,下一个标签,转到标签。
你可以直接点击左侧快速添加或删除标签。
▪1视图▪对新手几乎没有用处,你可以用它显示或者隐藏工程文件窗口,编译状态窗口。
查看输出文件,makefile文件,Map文件。
1Project Menu 工程菜单1New... –创建一个新的工程文件1Open –打开一个已经存在的工程文件1Open All Files... –打开工程的全部源文件1Close All Files –关闭全部打开的文件1Reopen... –重新打开一个最近打开过的工程文件1Make Project –解释和编译已经修改的文件为输出文件*注意与7Rebuild All的区别1Rebuild All –重新构筑全部文件注意在版本升级后对原有工程最好全部重新构筑*1Add File(s) –添加一个文件到工程中这个文件可以是非源文件1Remove Selected Files –从工程中删除选择的文件1Option... –打开工程编译选项对话框1Close –关闭工程1Save As... –将工程换一个名称存盘11Tools Menu 工具菜单1Environment Options –打开环境和终端仿真器选项对话框1Editor and Print Options –打开编辑和打印选项对话框1AVR Calc –打开AVR 计算器可以计算1UART 的波特率定时器的定时常数1Application Builder –打开应用向导程序生成硬件的初始化代码cool,对新手非常有用1Configure Tools –允许你添加自己的内容到工具菜单1Run –以命令行方式运行一个程序1Terminal 电脑终端使用很少,串口调试终端1Help 帮助不用我说了。
avr单片机教程

avr单片机教程1. 引言avr(Advanced Virtual RISC)是Atmel公司推出的一种低功耗、高性能的8位单片机系列。
它具有高度集成、易用性强、性能稳定等优点,广泛应用于嵌入式系统和电子产品中。
本教程将带你了解avr单片机的基本知识和编程技巧。
2. 单片机介绍avr单片机是一种高性能、低功耗的8位单片机,基于RISC架构。
它采用Harvard结构,具有16位数据总线和16位地址总线。
avr单片机的主要特点包括:较大的存储容量、高速的指令执行能力、丰富的外设资源和低功耗设计。
3. 开发环境配置在开始学习avr单片机之前,你需要准备好适当的开发环境。
以下是配置avr开发环境的基本步骤:3.1 安装AVR工具链AVR工具链是一套用于开发avr单片机的工具集合,包括编译器、汇编器、链接器等。
你可以从Atmel官网下载并安装最新版本的AVR工具链。
3.2 安装编程环境推荐使用AVR Studio或Arduino IDE作为开发工具。
AVR Studio是Atmel官方推出的集成开发环境,提供了丰富的调试和仿真功能。
Arduino IDE是一个简单易用的集成开发环境,适合初学者。
3.3 连接开发板将avr单片机开发板通过USB线缆连接到计算机。
确保电源供应正常,并安装好驱动程序。
3.4 设置开发环境打开AVR Studio或Arduino IDE,配置正确的开发板型号和端口号。
确保开发环境与开发板正常连接。
4. avr单片机基础知识在开始编程之前,我们需要了解一些avr单片机的基础知识。
4.1 引脚和端口avr单片机具有多个I/O引脚和端口,用于与外部设备进行数据交互。
每个引脚都有一个特定的名称和功能,例如PORTA、PORTB、PORTC等。
你可以通过编程设置引脚的工作模式和电平状态。
4.2 寄存器和位操作avr单片机拥有一系列寄存器,用于存储和处理数据。
你可以通过读写寄存器来进行数据操作。
基于ICCAVR和Proteus软件平台的AVR单片机设计开发流程
2010年2月吉林师范大学学报(自然科学版)l .1第1期Journal of Jilin Normal University (Natural Science Edition)Feb.2010收稿日期:2009-12-01作者简介:孙丽晶(1979-),女,吉林省梨树县人,现为长春工业大学基础科学学院讲师,硕士.研究方向:集成电路,半导体器件.基于ICC AVR 和Proteus 软件平台的AVR 单片机设计开发流程孙丽晶(长春工业大学基础科学学院,吉林长春130012)摘 要:简述了AVR 单片机的性能和应用软件,并通过实例说明了基于ICC AVR 和Proteus 软件平台的AVR 单片机设计开发流程.关键词:AVR;ICC AVR;Proteus 软件开发平台中图分类号:TP36811 文献标识码:A 文章编号:1674-3873-(2010)01-0103-03 随着单片机技术的不断发展,单片机越来越广泛地应用于军事、工业、家用电器、智能玩具、便携式智能仪表等领域,使产品的功能、精度和质量大幅度提高,且电路简单、故障率低、可靠性高、成本低廉.ATME L 公司出品的AVR 单片机则更是单片机这个大家族中的佼佼者,由于其可靠性高、运算速度快等特点,而被广大单片机使用者所喜爱,而方便快捷的AVR 单片机开发平台对于每个单片机使用者来说都是梦寐以求的.基于ICC AVR 和Proteus 软件平台的AVR 单片机设计开发流程就是这样一个平台.1 单片机及应用软件简介1.1 AVR 单片机简介AVR 单片机是基于AVR 内核的单片机[1],其产品种类繁多,包括功能较少的用于低端控制的最小封装可达SSOP8的小型单片机和功能复杂的拥有几百个引脚的多功能单片机.此类单片机的选择性很强,可适于多方面的产品,所以广泛应用于军事、工业、家用电器、智能玩具、便携式智能仪表等领域.其主流产品包括AT90系列、ATmega 系列和ATtiny 系列.AVR 核为32个通用工作寄存器与丰富指令集的组合,32个寄存器全部直接的与运算逻辑单元(ALU)连接,这使得可以通过在一个时钟周期内执行一条指令来访问到两个独立的寄存器这种组合机构具备的代码效率比完成同样处理能力的常规CI SC 微控制器要快十倍.1.2 ICC AVR 简介ICC AVR 是一种使用符合ANSI 标准的C 语言来开发微控制器MC U 程序的一个工具[2],它有以下几个主要特点:ICC AVR 是一个综合了编辑器和工程管理器的集成工作环境I DE,其可在WINDOWS 下工作;源文件全部被组织到工程之中,文件的编辑和工程的构筑也在这个环境中完成编译,错误显示在状态窗口中,并且用鼠标单击编译错误时光标会自动跳转到编辑窗口中引起错误的那一行;这个工程管理器还能直接产生可以直接使用的I NTEL HEX 格式文件,INTEL HE X 格式文件可被大多数的编程器所支持,用下载程序到芯片中.1.3 Proteus 简介Proteus 组合了高级原理布图、混合模式SPICE 仿真[3],PCB 设计以及自动布线来实现一个完整的电子设计系统.Proteus 产品系列也包含了我们革命性的VSM 技术,用户可以对基于微控制器的设计连同所有的周围电子器件一起仿真.用户甚至可以实时采用诸如LED/LCD 、键盘、RS232终端等动态外设模型来对设计进行交互仿真.2 用ICC AVR 建立一个程序并编译通过atmega128单片机的捕获功能测试一个脉冲宽度的程序来说明如何用ICC AVR 建立一个工程项目并编译的过程.第一步:运行iccavr,运行project/ne w,新建一个工程,保存为T -TestUseCapture.prj;第二步:运行Tools/Application Builder 建立工程#103#的工具,这个工具可以帮助软件使用者完成单片机资源的设定和初始化程序,CP U 的设置如图1所示,Timer1的设置如图2所示,设置点击确认即可生成模块程序,但此程序只包括端口初始化子程序和Timer1初始化子程序,还需要在程序中加入主程序和Timer1控制子程序;图1 C PU设置图2 timer1设置第三步:File/Save as 保存到刚才第一步建立的工程的文件夹中命名为T -TestUse Capture.c,之后在T -Te stUseCapture.c 程序中加入主程序main 和在程序Timer3-capt -isr(void)内部加入Timer1控制子程序[4];Timer1控制子程序功能是测量Atme ga 单片机PD4/IC1端口输入脉冲的宽度并在PORTB 和PORTE 端口上显示出来,其中PORTE 为高位,PORTB 为低位.通过测试两个上升沿之间的距离来测试脉冲的宽度,用到的硬件资源只有一个定时器(Timer1)程序如下:#pragma interrupt -handler timer1-capt -isr:12void timer1-capt -isr(void){switch(TestFlag){case TestFstP:{TestFla g=TestScdP;RoundSpeed -T=0x0000;SpeedStop=0x0000;SpeedBe gin=0x0000;TC NT1H=0x00;TC NT1L=0x00;PORTE=0x00;PORTB=0x00;}break;case TestScdP:{TestFlag=TestThdP;SpeedBe gin=ICR1;}break;case TestThdP:{TCC R3B =0x00;TestFlag=TestFstP;SpeedStop=ICR1;TC NT3H=0x00;TC NT3L=0x00;RoundSpeed -T=SpeedStop -SpeedBegin;PORTE=(RoundSpeed -T >>8);//output high 8bitPORTB=(RoundSpeed -T);//output low 8bit TCC R1B=0x03;}}}第四步:点击Biuld Project 对文件进行编译,编译成功后生成hex 文件可在仿真和烧写单片机时使用.3 用Proteus 建立一个硬件图并进行仿真在Proteus 中建立响应的硬件仿真图,单片机加载T -TestUseCapture.c 编译生成的hex 文件进行仿真.第一步:运行Proteus ISIS,运行File/Ne w Design,新建一个图形文件,保存为T -TestUseCapture.DSN;第二步:在Proteus ISIS 图型界面中放入At -mega128单片机,脉冲信号发生器Pulse 和示波器OSCILLOSC OPE,并连接如图3所示.其中,Pulse 用来发送脉冲信号,OSCILLOSC OPE 可以显示脉冲波形,Atmega128则是用来测试脉冲的宽度;第三步:单片机加载程序,右键选中单片机后左键点击弹出对话窗,加载程序,并设置单片机工作时钟.用同样的方法设置脉冲发生器发出频率为1KHz 的脉冲信号.设置单片机如图4所示,设置脉冲发生器如图5所示;第四步:按下仿真开始按钮进行仿真,通过计算可知仿真结果正确,之后可以改变脉冲发生器的频率进行验证.仿真图如图6所示.#104#图3 器件连接图图4 单片机设置图4 总结随着单片机的应用越来越广泛,单片机的种类越来越多,软件仿真的方法就变的更方便、更快捷,时间和成本都节省了很多.对于使用AVR 单片机的设计者来说,这种基于ICC AVR 和Proteus软件平台图5脉冲发生器设置图图6 仿真图的设计开发是一种非常好的工具.对于初学者来说,使用软件开发流程,可以很快的上手.对于有经验的设计者来说,它可以作为一个很好设计产品的平台.参 考 文 献[1]金春林.A VR 系列单片机C 语言编程及应用实例[M].北京:清华大学出版社,2001.[2]何立民.单片机高级教程[M].北京:北京航空航天大学出版社,2007.[3]马 潮.A VR 单片机嵌入式系统原理与应用实践[M ].北京:北京航空航天大学出版社,2007.[4]倪云峰.单片机原理与应用[M].西安:西安电子科技大学出版社,2009.[5]迟耀丹.5单片机原理与应用6课程教学改革探讨[J].吉林师范大学学报(自然科学版),2007,28(3):128~130.[6]徐亚范.软件系统序贯验后加权检验模型[J].吉林师范大学学报(自然科学版),2006,27(3):30~32.Design and Exploitation Flow of AVRS ingle Chip based on ICC AVR and Proteus Software Flat RoofSU N Li -jing(School of Basic Science,Changchun University of Technology,Changchun 130012,China)Abstract:The property and application software of AVR single chip were depicted,the design and e xploita tion flow of AVR single chip based on ICC AVR and Proteus software flat roof were explained,via actual example.Key words:AVR;ICC AVR;Proteus software exploitation flat roof#105#。
用AVRStudio直接做AVRGCC

在A VRStudio中建A VRGcc工程张家红(MSN:jiahzhang@ Technical Sales Engineer)说明:A VRStudio4.12版本内嵌了WinA VR(A VRGCC)接口,因此可以在A VRStudio中直接创建A VRGcc工程。
你需要安装的软件1:A VRStudio4.122:WinA VR-20050214-install(已经有了06新版本)可以到下载第一步: Project->New Project 提示下面对话框,在Project Type中选择A VR GCC,在Project Name中填写自己要建立的工程名字,在Location中选择项目所在的目录,如果不清楚,请点击Help阅读帮助文件。
点击Next,进入下一步。
第二步:选型调试平台和芯片型号。
第二步:选择调试平台和芯片型号Debug Platform:选择调试平台,请仔细根据所用的调试工具做选择,本文选择A VR Simulator,其中JTAGICE和JTAGMKII是是比较常见的开发工具,而ICE40和ICE50由于价格昂贵,所以国内很少有人使用。
点击Finish,工程创建结束。
第三步:编写代码第四步:为A VRGCC设置,编译并产生MakeFile文件Project Configuration Option在Device选项里面选择你使用的芯片,Frequency选型里面填写OSC的频率(为Delay函数提供基准),Optimization选型里面选择优化的级别,如详细了解请点击帮助。
如果用WinA VR,需要用Mfile来配置MAKEFILE文件,而A VRStudio用这一个对话框来生成MakeFile文件。
第五步:编译并调试。
略,请见Debug菜单。
说明(英语部分见Help Known issue)Selected part name is not consistent between AVR Studio and the avr-gcc plug-in。
avr开发环境及建立工程总结
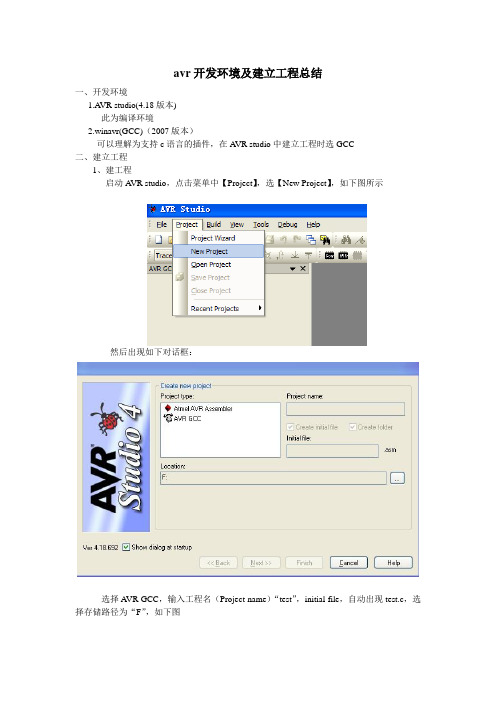
avr开发环境及建立工程总结一、开发环境1.A VR studio(4.18版本)此为编译环境2.winavr(GCC)(2007版本)可以理解为支持c语言的插件,在A VR studio中建立工程时选GCC二、建立工程1、建工程启动A VR studio,点击菜单中【Project】,选【New Project】,如下图所示然后出现如下对话框:选择AVR GCC,输入工程名(Project name)“test”,initial file,自动出现test.c,选择存储路径为“F”,如下图点击【next】,出现如下对话框,选择【AVR Simulator2】,选【ATmega48】点击【Finish】,出现如下界面将程序拷入编辑窗口,至此工程建立完毕。
注:程序中“#include <macros.h> //宏定义头文件”为ICCA VR头文件,需注释掉,否则报错,还有警告变量“j”未使用,变量“i”未初始化。
2、设置工程点击菜单中【Project】,选择【Configuration Options】选项出现如下对话框,设置【General】界面,A VR Studio可自动生成makefile文件,需要注意的是【Active】中default,和【Output File】中的default不要改,否则编译报错【Output File】中的如指定过路径,则需重新建立“default”文件夹,然后路径设为default设置【Include Directories】界面,路径指向c:\winavr\avr\include设置【Libraries】界面,路径指向c:\winavr\avr\lib\avr53、编译按工具条中的按钮,下面状态窗口出现如下信息,编译成功。
至此,工程建立及编译工程完成,接下来就可以进行A VR的学习和开发……。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
unsigned char add(unsigned char b,unsigned char c,unsigned char d) {
return b+c*d; } int main(void) {
unsigned char a=0; while(1) {
a++; PORTB=add(a,a,a); } } 在本例中,"add(a,a,a);"被编译如下: mov r20,r28 mov r22,r28 mov r24,r28 rcall add 第二个例子:定义通用寄存器为变量 #include <avr/io.h> unsigned char add(unsigned char b,unsigned char c,unsigned char d) { return b+c*d; } register unsigned char a asm("r20"); //将 r20 定义为 变量 a int main(void) { while(1) { a++; PORTB=add(a,a,a); } } 在本例中,"add(a,a,a);"被编译如下: mov r22,r20 mov r24,r20 rcall add 当然,在上面两个例子中,有部份代码被编译器优化了。 通过反复测试,发现编译器一般使用如下寄存器: 第 1 类寄存器,第 2 类寄存器的 r28,r29,第 3 类寄存器 如在中断函数中有调用基它函数,刚会在进入中断后,固定地将第 1 类寄存器和第 3 类寄存器入栈, 在退出中断又将它们出栈。
例:
#include <avr/io.h>
void fun1(void)
{
unsigned char i=0;
while(1)
{
PORTB=i++;
PORTC=0x01<<(i%8);
}
} unsigned char Stack[100]; //建立一个 100 字节的人工堆栈
void RunFunInNewStack(void (*pfun)(),unsigned char *pStack)
unsigned char i=0; while(1) { PORTB=i++; PORTC=0x01<<(i%8); } } int main(void) {
1
fun1();
} 首先,提出一个问题:如果要调用一个函数,真是只能以上面的方式进行吗? 相信学习过 C 语言的各位会回答,No!我们还有一种方式,就是“用函数指针变量调用函数”,如果大家 都和我一样,当初的教科书是谭浩强先生的《C 程序设计》的话,请找回书的第 10.5 节。 例子:用函数指针变量调用函数
2
对 main()中的 RunFun(fun1); 的编译如下 ldi r24,lo8(pm(fun1)) ldi r25,hi8(pm(fun1)) rcall RunFun 对 void RunFun(void (*pfun)())的编译如下 /*void RunFun(void (*pfun)())*/ /*(*pfun)();*/ .LM6: movw r30,r24 icall ret 在调用 void RunFun(void (*pfun)())的时候,的确可以把 fun1 的地址通过 r24 和 r25 传递给 RunFun()。 但是,RTOS 如何才能有效地利用函数的地址呢?
{
*pStack--=(unsigned int)pfun; /ned int)pfun>>8; //将函数的地址高位压入堆栈,
SP=pStack;
//将堆栈指针指向人工堆栈的栈顶
__asm__ __volatile__("RET \t"); //返回并开中断,开始运行 fun1()
} 第二种,是“把指向函数的指针变量作函数参数”
#include <avr/io.h>
void fun1(void)
{
unsigned char i=0;
while(1)
{
PORTB=i++;
PORTC=0x01<<(i%8);
}
} void RunFun(void (*pfun)()) //获得了要传递的函数的地址
#include <avr/io.h>
void fun1(void)
{
unsigned char i=0;
while(1)
{
PORTB=i++;
PORTC=0x01<<(i%8);
}
} void (*pfun)(); //指向函数的指针
int main(void)
{
pfun=fun1; // (*pfun)(); //运行指针所指向的函数
}
3
int main(void) {
RunFunInNewStack(fun1,&Stack[99]); } RunFunInNewStack(),将指向函数的指针的值保存到一个 unsigned char 的数组 Stack 中,作为人工堆栈。 并且将栈顶的数值传递组堆栈指针 SP,因此当用"ret"返回时,从 SP 中恢复到 PC 中的值,就变为了指向 fun1() 的地址,开始运行 fun1(). 上面例子中在 RunFunInNewStack()的最后一句嵌入了汇编代码 "ret",实际上是可以去除的。因为在 RunFunInNewStack()返回时,编译器已经会加上"ret"。我特意写出来,是为了让大家看到用"ret"作为返回后 运行 fun1()的过程。
建立一个属于自己的 AVR 的 RTOS
序
自从 03 年以来,对单片机的 RTOS 的学习和应用的热潮可谓一浪高过一浪.03 年,在离开校园前的, 非典的那几个月,在华师的后门那里买了本邵贝贝的《UCOSII》,通读了几次,没有实验器材,也不了了 之。
在 21IC 上,大家都可以看到杨屹写的关于 UCOSII 在 51 上的移植,于是掀起了 51 上的 RTOS 的热潮。 再后来,陈明计先生推出的 small rots,展示了一个用在 51 上的微内核,足以在 52 上进行任务调度。 前段时间,在 ouravr 上面开有专门关于 AVR 的 Rtos 的专栏,并且不少的兄弟把自己的作品拿出来, 着实开了不少眼界。这时,我重新回顾了使用单片机的经历,觉得很有必要,从根本上对单片机的 RTOS 的知识进行整理,于是,我开始了编写一个用在 AVR 单片机的 RTOS。 当时,我所有的知识和资源有: 1、Proteus6.7 可以用来模拟仿真 avr 系列的单片机 2、WinAVR v2.0.5.48 基于 GCC AVR 的编译环境,好处在于可以在 C 语言中插入 asm 的语句 3、mega8 1K 的 ram 有 8K 的 rom,是开发 8 位的 RTOS 的一个理想的器件,并且我对它也比较熟悉。 写 UCOS 的 Jean brosse 在他的书上有这样一句话,“渐渐地,我自然会想到,写个实时内核直有那 么难吗?不就是不断地保存,恢复 CPU 的那些寄存器嘛。” 好了,当这一切准备好后,我们就可以开始我们的 Rtos for mega8 的实验之旅了。 本文列出的例子,全部完整可用。只需要一个文件就可以编译了。我相信,只要适当可用,最简单的 就是最好的,这样可以排除一些不必要的干扰,让大家专注到每一个过程的学习。
第二篇: 人工堆栈
在单片机的指令集中,一类指令是专门与堆栈和 PC 指针打道的,它们是 rcall 相对调用子程序指令 icall 间接调用子程序指令 ret 子程序返回指令 reti 中断返回指令 对于 ret 和 reti,它们都可以将堆栈栈顶的两个字节被弹出来送入程序计数器 PC 中,一般用来从子程 序或中断中退出。其中 reti 还可以在退出中断时,重开全局中断使能。 有了这个基础,就可以建立我们的人工堆栈了。
第一篇:函数的运行
在一般的单片机系统中,是以前后台的方式(大循环+中断)来处理数据和作出反应的。 例子如下: makefile 的设定:运行 WinAvr 中的 Mfile,设定如下 MCU Type: mega8 Optimization level: s Debug format :AVR-COFF C/C++ source file: 选译要编译的 C 文件 #include <avr/io.h> void fun1(void) {
经理先进入;如果是占先式,只要有更高级的人在外面等,那么厕所里无论是谁,都要第一时间让出来,
让最高级别的人先用。”
#include <avr/io.h>
#include <avr/Interrupt.h>
第三篇:GCC 中对寄存器的分配与使用
在很多用于 AVR 的 RTOS 中,都会有任务调度时,插入以下的语句: 入栈: __asm__ __volatile__("PUSH R0 \t"); __asm__ __volatile__("PUSH R1 \t"); ...... __asm__ __volatile__("PUSH R31 \t"); 出栈 __asm__ __volatile__("POP R31 \t"); ...... __asm__ __volatile__("POP R1 \t"); __asm__ __volatile__("POP R0 \t"); 通常大家都会认为,在任务调度开始时,当然要将所有的通用寄存器都保存,并且还应该保存程序状 态寄存器 SREG。然后再根据相反的次序,将新任务的寄存器的内容恢复。 但是,事实真的是这样吗?如果大家看过陈明计先生写的 small rots51,就会发现,它所保存的通用寄存 器不过是 4 组通用寄存器中的 1 组。 在 Win AVR 中的帮助文件 avr-libc Manual 中的 Related Pages 中的 Frequently Asked Questions,其实有一 个问题是"What registers are used by the C compiler?" 回答了编译器所需要占用的寄存器。一般情况下,编译 器会先用到以下寄存器 1 Call-used registers (r18-r27, r30-r31): 调用函数时作为参数传递,也就是用得最多的寄存器。 2 Call-saved registers (r2-r17, r28-r29): 调用函数时作为结果传递,当中的 r28 和 r29 可能会被作为指向堆 栈上的变量的指针。 3 Fixed registers (r0, r1): 固定作用。r0 用于存放临时数据,r1 用于存放 0。 还有另一个问题是"How to permanently bind a variable to a register?",是将变量绑定到通用寄存器的方 法。而且我发现,如果将某个寄存器定义为变量,编译器就会不将该寄存器分配作其它用途。这对 RTOS 是很重要的。 在"Inline Asm"中的"C Names Used in Assembler Code"明确表示,如果将太多的通用寄存器定义为变量, 刚在编译的过程中,被定义的变量依然可能被编译器占用。 大家可以比较以下两个例子,看看编译器产生的代码:(在*.lst 文件中) 第一个例子:没有定义通用寄存器为变量 #include <avr/io.h>