运动控制卡说明书
JMC2410多功能四轴运动控制卡用户手册

JMC2410多功能四轴运动控制卡用户手册版权声明本文档所有权归深圳市杰美康机电有限公司(后面简称“杰美康”)所有;杰美康具有本产品及其软件的专利权、版权和其它知识产权。
未经授权,任何单位和个人不得直接或者间接地复制、制造、加工、使用本产品及其相关部分。
杰美康保留在不事先通知的情况下,修改本手册中的产品和产品规格等文件的权力杰美康全力维护本文档的正确性,但不承担由于本文档错误或使用本产品不当,所造成直接的、间接的、特殊的、附带的或相应产生的损失或责任。
2目录版权声明 (1)1概述 (1)1.1简介 (1)1.2技术规格 (1)2安装 (1)2.1检查配件 (1)2.2JMC2410结构布局 (2)2.3硬件安装 (2)2.4软件安装 (3)3接口信号定义 (3)3.1CN7连接器 (3)3.2CN3连接器 (4)3.3CN4连接器 (4)3.4CN5连接器 (4)3.5CN6连接器 (5)3.6S1拨码开关 (5)3.7S2拨码开关 (6)4信号连接 (6)4.1脉冲信号和方向信号输出 (6)4.2编码器输入信号EA、EB和EZ (7)4.3原点开关信号 (8)4.4正反向限位信号PEL/MEL (8)4.5减速信号SD (9)4.6到位信号INP (9)4.7伺服报警信号ALM (10)4.8误差清除信号ERC (10)4.9伺服使能信号SVON (11)4.10RDY信号 (11)4.11手轮输入信号PA和PB (12)4.12位置锁存输入信号LTC (12)4.13位置比较输出信号CMP (12)4.14通用数字输入信号DI (13)4.15通用数字输出信号DO (13)5修订记录 (14)1概述1.1 简介JMC2410是一款基于PCI接口4轴运动控制卡,控制步进电机或接收脉冲命令的伺服电机;JMC2410使用了专用的运动控制ASIC芯片,支持硬件直线插补;参数计算、加/减速处理、多轴直线插补由硬件完成,可以有效减小计算机的系统负担;JMC2410可接受编码器信号,并提供位置锁存函数。
雷赛运动控制卡说明书【详细版】

首先,请确保运动控制卡已经插入到你的计算机插槽中,已安装好驱动程序,并用演示软件确认硬件系统工作正常。
安装好VB软件,但在开始编写运动控制软件前,需要做下面几项工作:1 :建立自己的工作目录,如:d:\vbMotion(此目录名可以自己指定)。
2 :将DMC5480.bas文件拷贝到该目录下(此文件在软件CD的module目录下可以找到)。
3 :运行VB,并建立一个工程,然后保存此新建的工程在vbMotion目录中然后按下述步骤,将运动函数库链接到你的工程项目中:1:在VB编译器的“工程(P)”菜单中选择“添加模块”;2 选择“现存”;3 选择“DMC5480.bas”;4 选择“确定”。
5 当您将运动函数链接到你的工程项目中后,就可以象调用其它API函数一样直接调用运动函数,每个函数的具体功能,请参考软件手册中的“运动函数说明”,当然还可以打开模块文件DMC5480.bas了解每个函数的具体定义。
确保DMC5480运动控制卡已经插入到你的计算机插槽中,安装好驱动程序,演示软件和VC软件,在调用DMC5480运动函数之前,需要做下面几项工作:1. 启动演示软件,进行运动控制卡控制功能的简单测试,如:单轴定长运动等,以确定DMC5480运动控制卡软硬件安装正常。
2. 运行VC,并建立一工程,将工程命名为vcMotion(注:此工程名可以自己指定);3. 将DMC5480.lib和DMC5480.h文件拷贝到该目录下(此文件在module目录下);4. 将运动函数链接到你的工程项目中,将DMC5480.lib加入到工程中;5. 在调用运动函数的文件头部代码中加入#include “DMC5480.h”语句。
在编程过程中,可以参阅运动函数编程实例,可以通过网站下载,只要您将控制卡及其驱动软件安装好,即可直接运行这些源代码。
使用雷赛运动控制卡的设备控制系统结构如图3-1所示:图1 基于雷赛运动控制卡的设备控制系统结构从上面的结构图可以看出,控制系统的工作原理可以简单描述为:1. 操作员的操作信息通过操作界面(包括显示屏和键盘)传递给系统控制软件;2. 系统控制软件将操作信息转化为运动参数并根据这些参数调用DLL库中运动函数;3. 运动函数调用雷赛运动控制卡驱动程序发出控制指令给控制卡;4. 雷赛运动控制卡再根据控制指令发出相应的驱动信号(如脉冲、方向信号)给驱动器及电机、读取编码器数据、读/写通用输入/输出口。
普汉运动控制卡lc980人机界面说明书

人机界面操作说明:任何界面下,按复位键(或者系统上电时),主板将复位,机器将找原点,同时显示界面提示“正在复位”,机器成功回原点后,激光头自动移动到上次设置的定位点,若在复位前上次工作成功加工完毕,则此时系统将回主界面1,若上次工作未加工完毕(即加工过程中断电),从新开机就会提示是否断电续雕:点确定就会找到上次断电的切割点继续切割上次切割为完成的图形,点退出就会回到主界面。
:停止操作。
:启动/暂停加工过程。
:确认。
:退出当前界面。
:激光开/关:进入辅助界面。
:走边框。
激光头不出光,沿着加工图形外框快速运行,主要用于定位。
:存储在控制主板的加工文件。
:按下该键,主板将以当前机器的X/Y轴位置作为图形的相对原点。
:上下左右方向键:点击此按钮,则可以通过点击和移动Z轴。
此功能需要设备硬件支持。
7.1 各显示界面操作说明打开机器电源,控制面板显示“正在复位”,如图一,复位完成后显示主界面图二。
图一图二注:在图二界面中,可以直接触摸“速度”和“功率”,根据客户要求进行参数修改。
7.2 在主界面下,按功能后显示图三,即系统菜单界面。
图三图四7.3 U盘文件插入带有加工文件的U盘,触摸【U盘文件】,显示图四,可以对选择文件进行拷入内存或加工该文件。
7.4 内存文件在图三窗口下触摸【内存文件】,此时显示内存文件,可以通过方向键进行选择,触摸相应的文件名,此时可以对该文件进行选择操作。
用户设置下界面说明在上图触摸【用户设置】,显示下图参数为设置按键移轴的快慢为设备回机器原点的速度1、若点动使能【开启】时,可输入点动距离,每次按方向键一次会按该值移动;2、点动模式开启时,长按方向键不会连续移轴,必须将该点该使能关闭才可;厂家设置界面介绍在上图触摸【厂家设置】,输入“111111”,显示下图选择【开始能】,机器上电相应轴自动复位移动,【关使能】开机时轴不会动系统信息界面介绍系统信息界面介绍说明:格式化以后,内存所有文件将删除说明:请将前面三段IP 设置成与电脑相同在此界面触摸【系统管理】,显示下面界面。
MPC2810操作手册
MPC2810 运动控制卡用户手册
1概 述
1.1 简介
MPC2810 运动控制卡是步进机电公司自主研发生产的基于 PC 的运动 控制器,单张卡可控制 4 轴的步进电机或数字式伺服电机。通过多卡共用卡 支持多于 4 轴的运动控制系统的开发。
MPC2810 运动控制卡以 IBM-PC 及其兼容机为主机,基于 PCI 总线的 步进电机或数字式伺服电机的上位控制单元。它与 PC 机构成主从式控制结 构:PC 机负责人机交互界面的管理和控制系统的实时监控等方面的工作(例 如键盘和鼠标的管理、系统状态的显示、控制指令的发送、外部信号的监控 等等);运动控制卡完成运动控制的所有细节(包括直线和圆弧插补、脉冲 和方向信号的输出、自动升降速的处理、原点和限位等信号的检测等等)。
3.3.3.1 控制信号输出连接方法............................................................23 3.3.3.2 编码器输入连接方法................................................................25 3.3.3.3 专用输入的连接方法................................................................26 3.3.3.4 通用输入、输出的连接方法....................................................27
连接到转接板,最后开启电源。断开时先关闭外部电源,再断开电机、驱动 器与转接板的连接,最后断开控制卡与转接板的连接。
当有可疑的故障时不要进行操作。如果您怀疑本产品有损伤,请让有资 格的服务人员进行检查。
维宏维鸿四轴真四轴联动雕刻机运动控制卡说明书
维宏维鸿四轴真四轴联动雕刻机运动控制卡说明书1.1 维鸿系统的安装在安装新的维鸿前~请删除旧版本的维鸿。
删除的方法请参考程序卸载一节。
维鸿系统包括软件和运动控制卡两部分。
所以~系统的安装也分为两个阶段: 软件安装和运动控制卡的安装。
总体上~请您在安装完软件之后再安装运动控制卡~这样运动控制卡的驱动程序就不需要单独安装。
所以简单以说~可以分为这样几个步骤: (1) 安装维鸿软件~待安装程序提示关闭计算机后~关闭计算机。
(2) 关闭计算机后~安装运动控制卡。
(3) 重新启动计算机~进入Windows操作系统后~略微等待一会~待Windows自动完成配置~整个安装工作就算完成了。
(4) 运行维鸿系统。
下面详细介绍其中的关键步骤。
维鸿软件安装请按照下面的步骤安装软件:(1) 打开计算机电源~启动计算机~系统自动运行进入Windows操作系统。
如果你还没有安装Windows操作系统~请首先安装该操作系统。
(2) Windows 操作系统启动后~注意请关闭其他正在运行的程序。
(3) 解压维鸿V2.0免安装包,打开里面的dotNetFrameWork文件夹~安装dotNetFx40_Full_x86_x64.exe (4) 打开维鸿V2.0文件夹~右键创建桌面快捷方式(5) 双击打开桌面快捷键方式~运行维鸿。
维鸿软件驱动安装USB设备驱动支持XP、win7或win8等32位操作系统~任何一个小的错误都有可能安装驱动失败。
1. 将USB数据线连接到电脑任意USB接口~若出现新硬件向导信息提示中选“是~仅这一次,I,”选项~点击“下一步”。
在出现新硬件向导信息提示中选“从列表或指定位置安装,高级,”选项~点击“下一步”。
2. 选择“在搜索中包括这个位置,O,”选项~点击“浏览”。
3. 选择“维鸿控制设备驱动”文件夹,点击“下一步”。
4.在找到新的硬件向导对话框中选中对应的驱动,点击“下一步”(第一次安装时会自动跳过)。
Galil运动控制卡手册
ADT-8937 三轴运动+激光雕刻打标控制卡 用户手册说明书

ADT-8937 三轴运动+激光雕刻打标控制卡用 户 手 册深圳众为兴技术股份有限公司地址:深圳市南山区艺园路田厦IC产业园27-29栋5楼 邮编:518052电话**************传真************** E-mail:*****************版权声明本用户手册的所有部分,其著作财产权归属众为兴数控技术有限公司(以下简称众为兴)所有,未经众为兴许可,任何人不可任意地仿制,拷贝、誊抄或转译。
本用户手册没有任何形式的担保,立场表达或其他暗示。
若有任何因本用户手册或其所提到之产品的所有信息,所引起的直接或间接的资料流出,利益损失或事业终止,众为兴及其所属员工恕不担负任何责任。
除此之外,本用户手册提到的产品规格及资料仅供参考,内容有可能会更新,恕不另行通知。
商标声明用户手册中所涉及到的产品名称仅作识别之用,而这些名称可能是属于其它不同的商标或版权,在此声明如下:※INTEL,PENTIUM是INTEL公司的商标。
※WINDOWS,MS—DOS是 MICROSOFT公司产品标识。
※ADT—8937是众为兴公司的商标。
※其它末提到的标识,均属各注册公司所拥有。
版权所有,不得翻印。
众为兴数控技术有限公司说明书基本信息项目号 首次上传 版本号 总页数 编写工程师 排版工程师 ADT-8937 2012-8-14 A0201 82 艾小云校对记录日期 版本/页数 结果 确认注意事项说明※运输与储存☞产品包装箱堆迭不可超过六层☞不可在产品包装箱上攀爬、站立或放置重物☞不可使用与产品相连的电缆拖动或搬运产品☞严禁碰撞、划伤面板和显示屏☞产品包装箱应避免潮湿、暴晒以及雨淋※开箱检查☞打开包装后请确认是否是您所购买的产品☞检查产品在运输途中是否有损坏☞对照清单确认各部件是否齐全,有无损伤☞如存在产品型号不符、缺少附件或运输损坏等情况,请及时与我公司联系※接 线☞参加接线与检查的人员必须是具有相应能力的专业人员☞产品必须可靠接地,接地电阻应小于4 欧姆,不能使用中性线(零线)代替地线☞接线必须正确、牢固,以免导致产品故障或意想不到的后果☞与产品连接的浪涌吸收二极管必须按规定方向连接,否则会损坏产品☞插拔插头或打开产品机箱前,必须切断产品电源※检 修☞检修或更换元器件前必须切断电源☞发生短路或过载时应检查故障,故障排除后方可重新启动☞不可对产品频繁通断电,断电后若须重新通电,相隔时间至少1分钟※其 它☞未经允许,请勿擅自打开机壳。
KPCI882 运动控制卡使用说明书
KPCI882运动控制卡使用说明书一. 概述KPCI882是PCI总线两轴伺服/步进电机运动控制卡,它以高频率脉冲串输出方式,控制伺服/步进电机的运动。
该卡能精确地控制所发出的脉冲频率(电机速度)、脉冲个数(电机转角)及脉冲频率变化率(电机加速度),它能满足步进电机的各种复杂的控制要求。
可对电机进行位置控制、插补驱动、加速/减速等控制。
具有圆弧、直线插补功能。
它含有丰富的,功能齐全的软件库函数资源。
在Windows9X/2000环境下,用户可直接使用我们为您提供的”DLL”动态连接库函数;以最大方便地使您在Microsoft Visual BASIC 、Visual C++及各种其他软件环境中使用。
使用该卡可以方便地开发出您自己的运动控制系统如数控系统、检测设备、自动生产线、绘图仪、雕刻机、打标机、绕线机、医疗设备、包装机械、纺织机械等。
二. KPCI882技术指标及功能特点32位PCI总线半长卡步进、数字式伺服电机控制。
驱动脉冲频率为1到4MHZ,最大步长为268000000。
脉冲输出方式、方向可选。
实现定长驱动和连续驱动运动中可改变驱动速度。
实现定速、直线加/减速、非对称直线加/减速、S曲线加/减速等速度曲线。
实现2轴直线插补、圆弧插补、固定线速度插补、加减速驱动插补、步进插补(命令、外部信号)等插补功能。
实现外部信号控制的驱动操作。
具有硬件限位、原点搜寻、报警、急停、通用I/O等功能。
所有输入、输出信号均采用光电隔离。
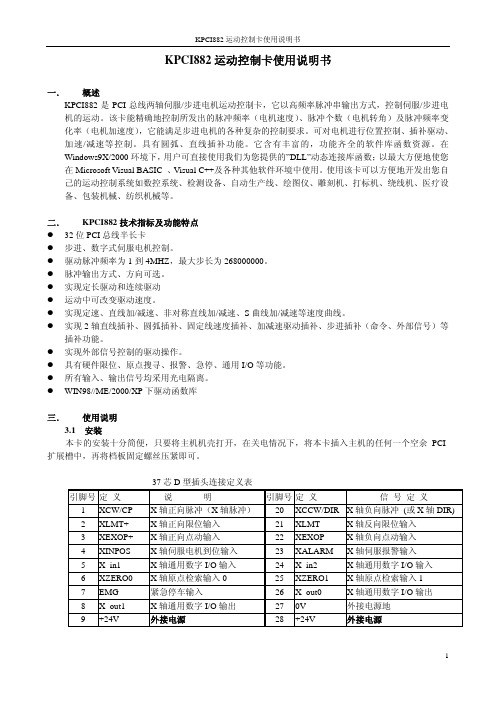
WIN98//ME/2000/XP下驱动函数库三. 使用说明3.1 安装本卡的安装十分简便,只要将主机机壳打开,在关电情况下,将本卡插入主机的任何一个空余PCI 扩展槽中,再将档板固定螺丝压紧即可。
37芯D型插头连接定义表引脚号定义说明引脚号定义信号定义1 XCW/CP X轴正向脉冲(X轴脉冲) 20 XCCW/DIR X轴负向脉冲(或X轴DIR)2 XLMT+ X轴正向限位输入21 XLMT- X轴反向限位输入3 XEXOP+ X轴正向点动输入22 XEXOP- X轴负向点动输入X轴伺服报警输入4 XINPOS X轴伺服电机到位输入 23XALARM5 X_in1 X轴通用数字I/O输入24 X_in2 X轴通用数字I/O输入6 XZERO0 X轴原点检索输入0 25 XZERO1 X轴原点检索输入17 EMG 紧急停车输入26 X_out0 X轴通用数字I/O输出0V 外接电源地8 X_out1 X轴通用数字I/O输出 279 +24V 外接电源28 +24V 外接电源引脚号 定 义 说 明 引脚号定 义 信号 定 义10 0V 外接电源地 29 YCW/CPY 轴脉冲(正向脉冲+) 11 YCCW/DIR Y 轴方向(负向脉冲-)30 YLMT+ Y 轴正向限位输入12 YLMT-Y 轴负向限位输入31 YEXOP+Y 轴正向点动输入13 YEXOP- Y 轴负向点动输入 32 YINPOS Y 轴伺服电机到位输入 14 YALARM Y 轴伺服报警输入 33 Y_in1 Y 轴通用数字I/O 输入 15 Y_in2 Y 轴通用数字I/O 输入 34 YZERO0 Y 轴原点检索输入016 YZERO1 Y 轴原点检索输入135 Y_out0 Y 轴通用数字I/O 输出 17 Y_out1 Y 轴通用数字I/O 输出 36 0V 外接电源地 18 0V 外接电源地37 +24V外接电源19 +24V 外接电源3.2 通用输入口接线方式NPN 输出的接近开关信号5-24V触点型开关量输入3.3 电机控制输出口接线规范NPN 输出的接近开关信号3.4 通用输出口接线方式毫安的灌电流。
深圳市众为兴数控技术 ADT-852 三轴运动控制卡 说明书

ADT-852三轴运动控制卡用户手册深圳市众为兴数控技术有限公司ADT-852三轴运动控制卡用户手册1版权声明本用户手册的所有部分其著作财产权归属众为兴数控技术有限公司以下简称众为兴所有末经众为兴许可任何人不可任意地仿制拷贝誊抄或转译本用户手册没有任何形式的担保立场表达或其他暗示若有任何因本用户手册或其所提到之产品的所有信息所引起的直接或间接的资料流出利益损失或事业终止众为兴及其所属员工恕不担负任何责任除此之外本用户手册提到的产品规格及资料仅供参考内容有可能会更新恕不另行通知商标声明用户手册中所涉及到的产品名称仅作识别之用而这些名称可能是属于其它不同的商标或版权在此声明如下INTEL PENTIUM是INTEL公司的商标WINDOWS MS DOS是 MICROSOFT公司产品标识ADT852是众为兴公司的商标其它末提到的标识均属各注册公司所拥有版权所有不得翻印众为兴数控技术有限公司ADT-852三轴运动控制卡用户手册2 目录一概要----------------------------------------------3 二硬件安装------------------------------------------4 三电气连接------------------------------------------5 四软件安装-----------------------------------------13五 ADT852库函数列表--------------------------------20六 ADT852库函数详解--------------------------------21 七运动控制开发编程示例-----------------------------25备注本说明书适用于ADT-852卡之C版ADT-852三轴运动控制卡用户手册3一 概要产品简介ADT852卡是基于PCI 总线的三轴伺服/步进控制卡脉冲输出方式可为脉冲+方向方式最大脉冲频率50KHz 位置管理采用计数器位数高达32位最大范围–2,147,483,648~+2,147,483,647 速度控制可用定速和直线加减速每轴有8个输入信号包括2个正负限位信号6个通用输入信号提供DOS WINDOWS95/98/NT/2000开发库可用VC++VB BC++等进行软件开发主要性能3轴伺服/步进电机控制每轴可独立控制互不影响 PCI 总线 即插即用最大脉冲输出频率为200KHz 脉冲输出为脉冲+方向方式 3轴32位计数最大计数范围-2,147,483,648~+2,147,483,647 直线加/减速 2-3轴直线插补运动中可以实时读出逻辑位置驱动速度每轴有8入4出数字I/O 除2个限位信号外均可作为通用I/O 使用数字输出可用于伺服开启伺服报警复位等信号 支持DOS WINDOWS95/98/NT/2000等操作系统应用范围1 PCB 钻孔铣边2 基于PC 的数控系统ADT-852三轴运动控制卡用户手册4二硬件安装一检查配件1 ADT-852 用户手册本手册2ADT-852 四轴PCI总线高性能运动控制卡3 ADT-852 用户光盘4 ADT-9137 37芯信号接线板1块5 ADT-D37 37芯屏蔽连接线1条6 ADT-9137 37芯信号接线板1块选件7 ADT-D37 37芯屏蔽连接线1条选件8 ADT-9125 25芯开关信号接线板1块选件9 ADT-D25 25芯屏蔽连接线1条选件10 ADT-DB25 25芯扁平线1条选件11ADT-DB37 37芯扁平线1条选件二安装1关闭电脑电源注ATX电源需总电源关闭2打开电脑机箱后盖3选择一条未占用的PCI插槽,插入ADT-852卡4检查ADT-852卡的金手指是否完整插入PCI插槽,拧整螺丝5根据用户情况决定是否安装J2J4接口线ADT-852三轴运动控制卡用户手册5三 电气连接一块Adt852卡有三个输入/输出接口其中J1J4为37针插座J2为25针插座J1为X Y Z 轴的脉冲输出开关量输入和开关量输出OUT0-OUT5的信号接线J4为开关量输入的信号接线J2为开关量输出OUT6-OUT15信号的接线 信号定义如下ADT-852三轴运动控制卡用户手册J1 线号说明6 ADT-852三轴运动控制卡用户手册 7线号 符号 说明1 XPU+/CW+ X 脉冲信号+2 XPU-/CW- X 脉冲信号-3 XDR+/CCW+ X 方向信号+4 XDR-/CCW- X 方向信号-5 YPU+/CW+ Y 脉冲信号+6 YPU-/CW- Y 脉冲信号-7 YDR+/CCW+ Y 方向信号+8 YDR-/CCW- Y 方向信号-9 ZPU+/CW+ Z 脉冲信号+ 10 ZPU-/CW-Z 脉冲信号-11 ZDR+/CCW+ Z 方向信号+ 12 ZDR-/CCW- Z 方向信号- 13 VCC 内部+5V 电源正端 不可接外接电源 14 VCC 内部+5V 电源正端 不可接外接电源 15 VCC 内部+5V 电源正端 不可接外接电源 16 INCOM1 光耦输入公共端下面的信号17 IN0XLMT+ X 正向限位信号 18 IN1XLMT- X 反向限位信号19 IN2 通用输入信号2 20 IN3 通用输入信号321 IN8YLMT+ Y 正向限位信号 22 IN9YLMT- Y 反向限位信号23 IN10 通用输入信号10 24 IN11 通用输入信号1125 IN16ZLMT+ Z 正向限位信号26 IN17ZLMT- Z 反向限位信号27 IN18 通用输入信号18 28 IN19通用输入信号19ADT-852三轴运动控制卡用户手册8 29 GND 内部电源地线 30 EXT_GND 外部电源地线31 OUT0 32 OUT1 33 OUT2 34 OUT3 35 OUT4 36 OUT5 开关量输出点37 +12V 内部+12V 电源正端 不可接外接电源J2 线号说明ADT-852三轴运动控制卡用户手册 9线号 符号 说明1 OUT62 OUT73 OUT84 OUT95 OUT106 OUT117 OUT128 OUT139 OUT14 10 OUT15开关量输出点11 NC 未用 12 NC 未用 13 NC 未用 14 NC 未用 15 NC 未用 16 NC未用 17 EXT_GND 18 EXT_GND 19 EXT_GND20 EXT_GND 21 EXT_GND 22 EXT_GND 23 EXT_GND 外部电源地线卡内部已经短接24 GND 内部电源地线 25 VCC 内部+5V 电源正端J4线号说明11线号 符号说明1 IN4 通用输入信号42 IN5 通用输入信号53 IN6 通用输入信号64 IN7 通用输入信号75 INCOM2 光耦输入公共端IN4-IN76 IN12 通用输入信号127 IN13 通用输入信号138 IN14 通用输入信号149 IN15 通用输入信号1510 INCOM3 光耦输入公共端IN12-IN1511 IN20 通用输入信号20 12 IN21 通用输入信号21 13 IN22 通用输入信号22 14 IN23 通用输入信号2315 INCOM4 光耦输入公共端IN20-IN2316 IN24 通用输入信号24 17 IN25 通用输入信号25 18 IN26 通用输入信号26 19 IN27 通用输入信号2720 INCOM5 光耦输入公共端IN24-IN2721 IN28 通用输入信号28 22 IN29 通用输入信号29 23 IN30 通用输入信号30 24 IN31 通用输入信号3125 INCOM6 光耦输入公共端IN28-IN3126 NC 未用 27 NC 未用 28 NC未用29 GND 内部电源地线30 GND 内部电源地线31 GND 内部电源地线32 VCC 内部+5V电源正端不可接外接电源33 VCC 内部+5V电源正端不可接外接电源34 VCC 内部+5V电源正端不可接外接电源35 +12V 内部+12V电源正端不可接外接电源36 +12V 内部+12V电源正端不可接外接电源37 +12V 内部+12V电源正端不可接外接电源a脉冲/方向输出信号的连接脉冲输出为差动输出方式可与步进/伺服驱动器很方便的连接下图为脉冲与方向的阳极已连通的接法13下图为脉冲与方向信号独立的接法建议采用此种方法因为是差动接法抗干扰性强b数字输入的连接c数字输出的连接15一 软件安装ADT852卡在WINDOWS95/98/NT/2000下必须安装驱动程序才能使用在DOS 下则无须安装驱动程序WIN95/98下驱动程序的安装以下用Windows98中文版为例说明驱动程序的安装在将ADT852卡安装到电脑上的PCI 插槽后电脑开机后应发现新硬件出现如下图的提示单击下一步后出现如下画面按上图所示选择再单击下一步出现如下画面以上假设E盘为光盘按上图输入路径或者使用浏览寻找ADT850.INF文件所在的路径单击下一步后应出现如下画面17单击下一步后出现如下画面单击完成后即完成ADT852卡的安装Winnt下驱动程序的安装Win2000下驱动程序的安装以下用Windows2000 Professional 中文版为例说明驱动程序的安装其余版本的 Windows2000与此类似在将ADT852卡安装到电脑上的PCI插槽后开机时应以管理员身份登陆电脑开机后应发现新硬件出现如下图的提示然后出现如下画面单击下一步后再显示如下画面19按上图选择后再单击下一步后出现如下画面再按上图选择指定一个位置单击下一步出现如下画面以上假设E盘为光盘或者使用浏览寻找ADT850.INF文件所在的路径单击确定后应出现如下画面20 21单击”下一步”后出现如下画面单击完成后即完成ADT852卡的安装22 二 ADT852库函数列表int init_board();int set_startv(int axis,unsigned long v); int set_speed(int axis,unsigned long v); int set_add(int axis,unsigned long v); int set_mode(int axis,int v);int set_inp_startv(unsigned long v); int set_inp_speed(unsigned long v); int set_inp_add(unsigned long v);int pmove(int axis,long pos); int sudden_stop(int axis); int dec_stop(int axis);int inp_move2(int axis1,int axis2,long pos1,long pos2);int inp_move3(int axis1,int axis2,int axis3,long pos1,long pos2,long pos3);int get_status(int axis,int *value);int get_speed(int axis,unsigned long *speed); int get_pos(int axis,long *pos); int reset_pos(int axis);int write_bit(int a,int v); int read_bit(int a);23三ADT852库函数详解1.初始化adt852卡 int init_board(void); 返回值 0正确 1错误可能未插卡或地址设置不正确 2.设置起始速度int set_startv(int axis,unsigned long v); axis 轴号1-3v 起始速度值范围20-50000 返回值 0正确 1参数错误 2卡错误3.设置驱动速度int set_speed(int axis,unsigned long v); axis 轴号1-3v 驱动速度值范围20-50000 返回值 0正确 1参数错误 2卡错误4.设置加速度int set_add(int axis,unsigned long v); axis 轴号1-3 v 加速度值 返回值 0正确 1参数错误 2卡错误5.设置驱动模式int set_mode(int axis,int v); axis 轴号1-3v 0正逻辑 1负逻辑 返回值 0正确 1参数错误 2卡错误如果驱动方向与实际方向相反可用此函数将运动方向反转6.设置插补起始速度24int set_inp_startv(unsigned long v); v 起始速度值范围20-50000 返回值 0正确 1参数错误 2卡错误7. 设置插补驱动速度int set_inp_speed(unsigned long v);v 驱动速度值范围20-50000 返回值 0正确 1参数错误 2卡错误8. 设置插补加速度int set_inp_add(unsigned long v); v 加速度值 返回值 0正确 1参数错误 2卡错误9. 定量驱动int pmove(int axis,long pos); axis 轴号1-3pos 脉冲数范围-268435455 to 268435455 返回值 0正确 1参数错误 2卡错误10. 立即停止驱动int sudden_stop(int axis); axis 轴号1-3 返回值 0正确 1参数错误 2卡错误11. 减速停止驱动int dec_stop(int axis); axis 轴号1-3 返回值 0正确 1参数错误 2卡错误12. 两轴直线插补int inp_move2(int axis1,int axis2,long pos1,long pos2); axis1,axis2 轴号1-3 pos1,pos2 脉冲数25返回值 0正确 1参数错误 2卡错误13. 三轴直线插补int inp_move3(int axis1,int axis2,int axis3,long pos1,long pos2,long pos3);axis1,axis2,axis3 轴号1-3pos1,pos2,pos3 脉冲数 返回值 0正确 1参数错误 2卡错误14. 获取轴状态int get_status(int axis,int *value); axis 轴号1-3 value 状态值的指针 1正在驱动 0驱动结束 返回值 0正确 1参数错误 2卡错误15. 获取轴当前速度int get_speed(int axis,unsigned long *speed); axis 轴号1-3 value 速度值的指针 返回值 0正确 1参数错误 2卡错误16. 获取当前位置int get_pos(int axis,long *pos); axis 轴号1-3 value 位置值的指针 返回值 0正确 1参数错误 2卡错误17. 当前位置清零int reset_pos(int axis); axis 轴号1-3 返回值 0正确 1参数错误 2卡错误18. 输出单点26 int write_bit(int a,int v);a 输出点0-15v 0低1高返回值0正确1参数错误2卡错误输出数对应接线图相应的输出号19. 读单个输入点int read_bit(int a);a 输入点0-31返回值0低电平1高电平-1错误输入点数含义如下IN0X轴正限位IN1X轴负限位IN8Y轴正限位IN9Y轴负限位IN16Z轴正限位IN17Z轴负限位其余与接线图对应为通用输入点27四运动控制开发编程示例所有函数均为立即返回而不是等待驱动结束后才返回所有驱动操作都是由ADT852卡完成上位机主要做实时监控及界面处理的工作1开发DOS 下的运动控制系统Borland C++ 3.1DOS 下的开发库共有三个文件在配套光盘的\adt852\dos\lib\目录下一个是头文件adt852.h 另外两个是库函数一个是大模式库adt852l.lib large memory model 一个是巨模式库adt852h.lib huge memory model 可根据不同的编译环境选择a 单轴定量匀速运动 目的让X 轴的步进电机以1000 pps 的速度运动10000步程序如下#include “adt852.h” void main() {if(init_board()!=0) return; //未安装ADT852卡 //以下只对X 轴操作set_startv(1,1000);set_speed(1,1000); //如果起始速度大于或等于驱//动速度则为匀速运动pmove(1,10000); //开始驱动 int s; while(1) {get_status(1,&s); //读驱动状态 if(s==0)break; //驱动结束跳出28…… //可执行读键盘显示位置等函数 } return ; }b 单轴定量加/减速运动 目的 让X 轴以下列速度运动20000步 起始速度2000 pss 驱动速度20000 pss 加/减速度40000 pss程序如下#include “adt852.h” void main() {if(init_board()!=0) return; //未安装ADT832卡 // X 轴操作set_startv(1,400); //起始速度set_speed(1,4000); //驱动速度set_acc(1,40000); //加/减速度pmove(1,20000); //开始驱动 int s; while(1) {get_status(1,&s); //读驱动状态 if(s==0)break; //驱动结束跳出 …… //可执行读键盘显示位置等函数 } return ; }c 多轴运动29以上虽为单轴操作但实际上可同时设置另外几轴的数据互相之间并不影响如在X 轴驱动时设置好Y 轴的参数然后驱动Y 轴对X 轴的运动不会有任何影响如此可独立操作san 三轴d 两轴直线插补 直线插补与单轴运动基本类似 程序如下 #include “adt852.h” void main() {if(init_board()!=0) return; //未安装ADT832卡 set_inp_startv(1000); set_inp_speed(1000);inp_move2(1,2,10000,-20000); //X-Y 开始插补 //X 正向移动10000步 //Y 反向移动20000步 int s1,s2; while(1) {get_status(1,&s1); //读X 状态 get_status(2,&s2); //读Y 状态 if(s1==0 && s2==0)break; //结束跳出 …… //可执行读键盘显示位置等函数 } return ; }e 三轴直线插补 程序如下 #include “adt852.h” void main() {if(init_board()!=0) return; //未安装ADT832卡 set_inp_startv(1000); set_inp_speed(1000);ADT-852三轴运动控制卡用户手册30 inp_move3(1,2,3,10000,-20000,30000); //X-Y 开始插补 //X 正向移动10000步 //Y 反向移动20000步 // Z 正向移动30000步 int s1,s2,s3;while(1) {get_status(1,&s1); //读X 状态get_status(2,&s2); //读Y 状态get_status(2,&s3); //读Z 状态if(s1==0 && s2==0 && s3==0)break; //结束跳出…… //可执行读键盘显示位置等函数 }return ;}2用VB 开发WINDOWS 下的运动控制系统VB 下的开发库共有三个文件在配套光盘的\adt852\win\vb\目录下一个是动态库ADT852.DLL 一个是模块文件ADT852.BAS 一个是WindowsNT/2000使用的文件winio.sys 动态库中的函数已在模块文件ADT852.BAS 中有声明基本使用方法与DOS 下的编程相同详细的例子在用户光盘上3用VC 开发WINDOWS 下的运动控制系统VC 下的开发库共有三个文件在配套光盘的\adt852\win\vc\目录下一个是静态库ADT852.LIB 一个是头文件ADT852.H 一个是WindowsNT/2000使用的文件winio.sys 动态库中的函数已在头文件ADT852.H 中有声明基本使用方法与DOS 下的编程相同详细的例子在用户光盘上。
RNR全能型USB运动控制卡V1快速入门手册说明书

RNR 全能型USB 运动控制卡快速入门手册版本 1.0非常感谢您选购我司飞雕系列MACH3 运动控制卡!本文档将帮助初次接触使用本产品的用户快速完成产品的安装及调试。
准备工作首先,你要准备一台有 USB 接口的电脑。
飞雕系列 MACH3运动控制卡采用 USB 免驱动设计,所以兼容性好。
电脑的操作系统可以是 XP、WIN7、WIN8 系统。
可以是32 位系统,也可以是 64 位系统。
其次,你可能需要准备机床所使用的电机驱动模块的接线端子说明;如果有变频器,还需准备变频器接线端子说明。
42或者57系列电机驱动模块推荐选购我司 TB6600升级版驱动器或者DM542驱动模块。
对于需要连接急停开关、限位开关以及原点开关的用户,你需要准备这些开关和相应的接线端子说明。
急停开关一般采用蘑菇头开关。
限位开关和原点开关分为机械开关和电子开关(光电式、电感式、电磁式等形式)两种,机械开关比较简单,选购也没什么讲究。
选购电子开关时,应当选用 NPN 常开型。
这样比较容易接线。
Mach3 软件安装1、安装 Mach3 软件并运行 Mach3VersionR3.041 安装程序。
Mach3 安装很简单。
只要一直点击下一步(next ),或者是(Yes )即可。
如下图:下载资料中找到Mach3 软件,如图:选择 Mach3 安装位置,一般不需要改动,缺省安装在 C 盘的Mach3 文件夹中。
最后一步需要注意:对于 64 位的电脑,最好不要勾选 Load Mach3 Driver 这一项,因为这会引起系统提示安装错误。
点击“FINSH”。
Mach3 软件就安装完毕了。
2、破解及汉化接下来就是破解和汉化。
打开“mach3 汉化和破解.rar”压缩包。
如图:破解很简单,将压缩包中的文件 Mach1Lic.dat 拷贝到 Mach3 的安装文件夹中,覆盖原有的 Mach1Lic.dat 文件即可。
如果需要安装汉化包,就把“mach3 汉化和破解.rar”压缩包里面的文件全部拷贝至 Mach3 的安装文件夹中,覆盖原有文件。
ECI1408 网络型运动控制卡用户手册说明书

运动控制器提供丰富的接口,具有优良的运动控制性能,可以满足各种项目的扩展需求。
本手册介绍了产品的安装、接线、接口定义和操作说明等相关内容。
本手册版权归深圳市正运动技术有限公司所有,在未经本公司书面授权的情况下,任何人不得翻印、翻译和抄袭本手册中的任何内容。
前述行为均将构成对本公司手册版权之侵犯,本司将依法追究其法律责任。
涉及ECI控制器软件的详细资料以及每个指令的介绍和例程,请参阅ZBASIC软件手册。
本手册中的信息资料仅供参考。
由于改进设计和功能等原因,正运动公司保留对本资料的最终解释权!内容如有更改,恕不另行通知!调试机器要注意安全!请务必在机器中设计有效的安全保护装置,并在软件中加入出错处理程序,否则所造成的损失,正运动公司没有义务或责任对此负责。
为了保证产品安全、正常、有效的使用,请您务必在安装、使用产品前仔细阅读本产品手册。
产品型号:ECI1408网络型运动控制卡文件名版本号版本(更改)说明更新日期更改人用户手册V1.5 1.增加型号信息,命名规则2.增加各个端子和接口的规格接线和基本使用方法3.增加网口说明4.增加扩展模块资源映射5.增加编程软件使用方法6.增加版权声明、安全注意事项、运行与维护及售后服务说明内容2023/4/19 xcx前言更新记录● 本章对正确使用本产品所需关注的安全注意事项进行说明。
在使用本产品之前,请先阅读使用说明并正确理解安全注意事项的相关信息。
● 本产品应在符合设计规格要求的环境下使用,否则可能导致设备损坏,或者人员受伤,因未遵守相关规定引发的功能异常或部件损坏等不在产品质量保证范围之内。
● 因未遵守本手册的内容、违规操作产品引发的人身安全事故、财产损失等,我司将不承担任何法律责任。
按等级可分为“危险”、“注意”。
如果没有按要求操作,可能会导致中度伤害、轻伤及设备损伤的情况。
请妥善保管本指南以备需要时阅读,并请务必将本手册交给最终用户。
安装危险◆ 控制器拆卸时,系统使用的外部供应电源全部断开后再进行操作,否则可能造成设备误操作或损坏设备;◆ 禁止在以下场合使用:有灰尘、油烟、导电性尘埃、腐蚀性气体、可燃性气体的场所;暴露于高温、结露、风雨的场合;有振动、冲击的场合;电击、火灾、误操作也会导致产品损坏和恶化。
运动控制卡说明书
1.4.2 多轴独立运动控制 1.4.3 多轴插补运动控制 1.4.4 光码盘反馈和其它能力
第二章控制卡的安装
2.1 硬件安装
PCI_SERVO4 控制卡对 PC 机的硬件要求十分简单:能安装 Windows2000 及以上操作系统, 并带有 PCI 插槽的 486 以上机型即可,建议使用更高主频的 Pentium 及以上机型以获取更好的 性能。为了整个控制系统的可靠性,建议使用工控 PC 机。PCI_SERVO4 卡基于 PCI 总线,因 此卡上无需进行跳线设置。
49
SDIRX
X 轴方向输出
48
SDATAX X 轴脉冲输出
47
XENABLE X 轴使能输出
46
XINPOS
X 轴到位信号输入
45
XSTATE
X 轴的准备状态
44
NC
43
EX5VY
Y 轴+5V 外部电源正 ZH 42
GNDY
Y 轴+5V 外部电源地
41
SDIRY
Y 轴方向输出
40
SDATAY Y 轴脉冲输出
用户示例程序
正是由于 PCI_SERVO4 的开放式结构,使之应用范围十分广泛,在由步进电机和数字式
伺服电机组成的基于 PC 机的运动控制系统中,都可以使用 PCI_SERVO4 作为核心控制单元,
例如:
数控机床、加工中心、机器人等;
X-Y-Z 控制台;
绘图仪、雕刻机、印刷机械;
送料装置、云台;
可编程的梯形曲线运动模式,实现高精度的位置控制。
具有捕获原位的功能,实现高精度的位置锁存。
2. 输入输出
台达运动控制卡行销手册(new)

固定的指令指令周期
运动模式
同时两轴、 同时两轴、三轴插补功 能
配线以及维护工时长且成本高, 配线以及维护工时长且成本高, 省配线, 省配线,配线以及维护成本几乎为 数量众多的控制电缆易造成系统 抗干扰能力强。 零,抗干扰能力强。 的不稳定。 的不稳定。 No(与程序效率有关 与程序效率有关, No(与程序效率有关,无固 Yes(0.5/1ms,由系统决定 由系统决定) Yes(0.5/1ms,由系统决定) 定时间) 定时间) 可同时切换速度、位置、 可同时切换速度、位置、扭矩模式 速度/位置/扭矩, 速度/位置/扭矩,不可同时切换 ,可做复杂轨迹运算
ASD-DMC-GE16PR
正在研 发中
ASD-DMC-GE04AD
ASD-DMCASD-DMC-GE04DA ASD-DMCASD-DMC-GE01PU
主机1 主机1组脉冲 输出模块 主机1 主机1组手轮 输入模块
ASD-DMCASD-DMC-GE01PG 16
2)远端 部分 2)远端IO部分 远端
19
该设备的性能特点: 该设备的性能特点:
自动调整升降平台
图像及光路系统
刮刀系统
自动调整升降平台
稳定的钢网固定结构
20
完善的图像处理系统
具体电控系统组成
a) 轴控部分 伺服共 颗: 200W 1颗;400W 1颗; 750W 2颗 伺服共4颗 颗 颗 颗 步进共8颗 步进共 颗 b) IO部分 部分 输入点 64点; 输出点 64点 点 点
台达DMC-Net总线控制卡系统架构图 总线控制卡系统架构图 台达
5
2. 控制轴数众多
一般市场上主流的运动控制卡控制的轴数多数为4轴 最高只是到达 轴 一般市场上主流的运动控制卡控制的轴数多数为 轴,最高只是到达8轴,如 需要控制轴数增加,只能通过增加扩展卡来实现轴数增加的目的, 需要控制轴数增加,只能通过增加扩展卡来实现轴数增加的目的,这样还要 做硬件相应设定以及软件映射等工作,十分繁琐,而台达运动控制卡PCI做硬件相应设定以及软件映射等工作,十分繁琐,而台达运动控制卡 DMC-A01最多可控制 轴,这是目前市场上控制轴数最高的,如果做超过 最多可控制12轴 这是目前市场上控制轴数最高的,如果做超过8 最多可控制 轴的工程项目,只采用一块卡就可以,十分方便,如下图所示: 轴的工程项目,只采用一块卡就可以,十分方便,如下图所示:
众为兴数控技术 ADT-856 六轴运动控制卡 说明书

ADT-856 六轴运动控制卡用户手册众为兴数控技术有限公司第 1 页 共 17 页版权声明本用户手册的所有部分其著作财产权归属众为兴数控技术有限公司以下简称众为兴所有末经众为兴许可任何人不可任意地仿制拷贝誊抄或转译本用户手册没有任何形式的担保立场表达或其他暗示若有任何因本用户手册或其所提到之产品的所有信息所引起的直接或间接的资料流出利益损失或事业终止众为兴及其所属员工恕不担负任何责任除此之外本用户手册提到的产品规格及资料仅供参考内容有可能会更新恕不另行通知商标声明用户手册中所涉及到的产品名称仅作识别之用而这些名称可能是属于其它不同的商标或版权在此声明如下INTELPENTIUM 是INTEL公司的商标WINDOWSMS DOS 是 MICROSOFT公司产品标识 ADT 856是众为兴公司的商标其它末提到的标识均属各注册公司所拥有版权所有不得翻印众为兴数控技术有限公司一 概要第 2 页 共 17 页产品简介ADT856卡是基于PCI 总线的高性能六轴伺服/步进控制卡支持一个系统中使用多达16块控制卡可控制96路伺服/步进电机支持即插即用位置可变环形可在运动中随时改变速度可使用连续插补等先进功能 脉冲输出方式可用单脉冲脉冲+方向或双脉冲脉冲+脉冲方式最大脉冲频率4MHz 采用先进技术使输出频率在很高的时候也能使频率误差小于0.1%位置管理采用两个加/减计数器一个用于内部管理驱动脉冲输出的逻辑位置计数器一个用于接收外部的输入输入信号可以是A/B 相输入的编码器或光栅尺也可是上/下脉冲的输入信号作为实际位置计数器计数器位数高达32位最大范围–2,147,483,648~+2,147,483,647外部输入也可用于手轮输入作为普通的计数 提供伺服接口信号如编码器信号到位信号INPOS报警信号ALARM 伺服开启SERVO ON 等 多种控制方式如定量运动连续运动回零运动多轴插补圆弧插补等插补一般用定速运动也可用直线/S 曲线加减速S曲线加减速不能用于圆弧插补插补带有连续插补功能即在插补过程中输入下一点的插补数据以保证脉冲的连续使插补达到更快更好的性能最大插补速度可达2Mhz速度控制可用定速和直线/S 曲线加减速可做非对称直线加减速可用自动/手动减速在定量驱动时可防止速度曲线产生三角波形每轴有2个32位比较寄存器用于产生中断或作为软件限位 每轴有8个输入信号包括2个正负限位信号3个停止信号1个伺服到位信号1个伺服报警信号和1个通用输入信号除限位信号外其余信号可通过设置成无效来作为通用输入信号3个停第 3 页 共 17 页 止信号可作为原点信号减速信号编码器Z 相搜寻使用所有数字输入信号均有积分型的滤波器可选8种滤波时间常数以防止干扰 中断可设置成在各种情况下产生如加/减速驱动的定速开始时定速完毕时驱动完毕时位置计数器和比较器之间的大小关系有变化时等等此外连续插补发生下一个数据请求时的中断提供DOS WINDOWS95/98/NT/2000开发库可用VC++VB BC++等进行软件开发主要性能32位PCI 总线即插即用6轴伺服/步进电机控制每轴可独立控制互不影响 脉冲输出的频率误差小于0.1%最大脉冲输出频率为4MHz脉冲输出可用单脉冲脉冲+方向或双脉冲脉冲+脉冲方式6轴均有位置反馈输入32位计数最大计数范围-2,147,483,648~+2,147,483,647直线或S 曲线进行加/减速非对称直线加/减速运动2-6轴直线插补CW CCW 圆弧插补可用连续插补功能最大驱动速度2MHz每轴都有2 个32位比较寄存器用于逻辑位置计数器或者实际位置计数器的位置大小比较可用于软件限位或产生中断可接收伺服马达驱动器的各种信号如2相编码器信号到位信号报警信号等每轴有3个STOP 信号可用于原点搜寻编码器Z 相搜第 4 页 共 17 页寻运动中可实时改变速度运动中可以实时读出逻辑位置实际位置驱动速度加速度加/减速状态加速中定速中减速中可编程中断可以由多种原因产生中断每轴有8入数字I/O 除2限位信号外均可作为通用I/O 使用数字输出共有32个可用于伺服开启伺服报警复位等信号每一个输入信号的输入端都装备积分型的滤波器可以设定哪一个输入信号的滤波器功能变为有效或无效滤波器的时间常数从8个种类里可以选择1个支持在一个系统中使用多达16个控制卡支持DOS WINDOWS95/98/NT/2000等操作系统应用范围 1 多轴雕铣系统 2 机器人系统 3 空间座标测量系统 4 基于PC 的数控系统二 硬件安装第 5 页 共 17 页一检查配件 1 ADT-856 用户手册本手册 2 ADT-856 四轴PCI 总线高性能运动控制卡 3 ADT-856 用户光盘 4 ADT-9137 37芯信号接线板2块 5 ADT-D37 37芯屏蔽连接线2条 6 ADT-DB37 37芯扁平线1条二 安装 1 关闭电脑电源注ATX 电源需总电源关闭 2 打开电脑机箱后盖 3 选择一条未占用的PCI 插槽,插入ADT-856 4 检查ADT-856的金手指是否完整插入PCI 插槽,拧整螺丝 5 根据用户情况决定是否安装J3J4接口线三 电气连接一块Adt850卡有四个输入/输出接口其中J1J2为37针插座J4为25针插座J3为40针排座J1为X Y Z 轴的脉冲输出开关量输入/输出的信号接线 J2为W U V 轴的脉冲输出开关量输入/输出的信号接线 J3为一些开关量输入和编码器输入信号的接线J4为开关量输出OUT12-OUT31信号的接线 J1J2所有信号均为光耦隔离J3的信号为不隔离的信号必须另加一块隔离电路板使用J4的信号为不隔离的开关量输出信号不加隔离板时输出电压建议采用+12V 电源信号定义如下第 6 页 共 17 页J1 线号说明线号 符号 说明 1 XPU+ X 脉冲信号+第 7 页 共 17 页 2 XPU- X 脉冲信号-3 XDR+ X 方向信号+4 XDR- X 方向信号-5 YPU+ Y 脉冲信号+6 YPU- Y 脉冲信号-7 YDR+ Y 方向信号+8 YDR- Y 方向信号-9 ZPU+ Z 脉冲信号+10 ZPU- Z 脉冲信号-11 ZDR+ Z 方向信号+12 ZDR- Z 方向信号-13 EXT_VCC 14 EXT_VCC15 EXT_VCC脉冲/方向信号输出+5V 端用于共阳极输入的驱动器 16 INCOM1 光耦输入公共端17 XLMT+ X 正向限位信号18 XLMT- X 反向限位信号19 XSTOP0 X 停止信号0可做通用输入信号 20 XSTOP1 X 停止信号1可做通用输入信号 21 YLMT+ Y 正向限位信号22 YLMT- Y 反向限位信号23 YSTOP0 Y 停止信号0可做通用输入信号 24 YSTOP1 Y 停止信号1可做通用输入信号 25 ZLMT+ Z 正向限位信号26 ZLMT- Z 反向限位信号27 ZSTOP0 Z 停止信号0可做通用输入信号 28 ZSTOP1 Z 停止信号1可做通用输入信号 29 EXTOUT_GND 输出信号公共地端第 8 页 共 17 页 30 EXTOUT_GND 输出信号公共地端31 OUT0 输出信号032 OUT1 输出信号133 OUT2 输出信号234 OUT3 输出信号235 OUT4 输出信号436 OUT5 输出信号537 NC 空脚J2 线号说明线号 符号 说明 1 WPU+ W 脉冲信号+第 9 页 共 17 页 2 WPU- W 脉冲信号-3 WDR+ W 方向信号+4 WDR- W 方向信号-5 UPU+ U 脉冲信号+6 UPU- U 脉冲信号-7 UDR+ U 方向信号+8 UDR- U 方向信号-9 VPU+ V 脉冲信号+10 VPU- V 脉冲信号-11 VDR+ V 方向信号+12 VDR- V 方向信号-13 EXT_VCC 14 EXT_VCC15 EXT_VCC脉冲/方向信号输出+5V 端用于共阳极输入的驱动器 16 INCOM2 光耦输入公共端17 WLMT+ W 正向限位信号18 WLMT- W 反向限位信号19 WSTOP0 W 停止信号0可做通用输入信号 20 WSTOP1 W 停止信号1可做通用输入信号 21 ULMT+ U 正向限位信号22 ULMT- U 反向限位信号23 USTOP0 U 停止信号0可做通用输入信号 24 USTOP1 U 停止信号1可做通用输入信号 25 VLMT+ V 正向限位信号26 VLMT- V 反向限位信号27 VSTOP0 V 停止信号0可做通用输入信号 28 VSTOP1 V 停止信号1可做通用输入信号 29 EXTOUT_GND 输出信号公共地端第 10 页 共 17 页 30 EXTOUT_GND 输出信号公共地端31 OUT6 输出信号632 OUT7 输出信号733 OUT8 输出信号834 OUT9 输出信号935 OUT10 输出信号1036 OUT11 输出信号1137 NC 空脚J3线号说明线号 符号说明1 XECA2 XECB3 XINPOS4 XSTOP25 YALARM6 XIN07 ZECA8 WECA9 ZINPOS10 ZSTOP211 WALARM12 ZIN013 UECA14 VECA15 UINPOS16 USTOP217 V ALARM18 UIN019 VCC20 GND21 YECA22 YECB23 XALARM24 YINPOS25 YSTOP226 YIN027 ZECB28 WECB第 11 页共 17 页29 ZALARM30 WINPOS31 WSTOP232 WIN033 UECB34 VECB35 UALARM36 VINPOS37 VSTOP238 VIN039 VCC40 GNDJ4线号说明线号符号说明1 OUT12 开关量输出点第 12 页共 17 页第 13 页 共 17 页 2 OUT133 OUT144 OUT155 OUT166 OUT177 OUT188 OUT199 OUT2010 OUT2111 OUT2212 OUT2313 OUT2414 OUT2515 OUT2616 OUT2717 OUT2818 OUT2919 OUT3020 OUT3121 GND 22 GND内部电源地线23 VCC 24 VCC内部+5V 电源正端25 +12V 内部+12V 电源正端a. 脉冲输出的接法脉冲输出为差动输出方式第 14 页 共 17 页可与步进/伺服驱动器很方便的连接下图为脉冲与方向的阳极已连通的接法下图为脉冲与方向信号独立的接法建议采用此种方法因为是差动接法抗干扰性强b. 数字输入的连接第 15 页 共 17 页c. 数字输出的连接输出为光耦隔离输出最大电流100mA J2的输出 注意如接感性负载如继电器电磁阀等应如图加上续流二极管否则易造成输出点的损坏第 16 页 共 17 页四 软件安装请参考Adt850说明书中的软件安装五 功能说明请参考Adt850说明书中的功能说明六 Adt856库函数列表请参考Adt850说明书中的库函数列表Adt856与Adt850库函数列表不同之处Adt856新增函数int adt856_initial();int adt856_end();int inp_move6(int cardno,long pulse1,long pulse2,long pulse3,longpulse4,long pulse5,long pulse6);Adt856废除函数int adt850_initial();int adt850_end();int read_di(int cardno,unsigned long *value);int write_do(int cardno,unsigned long value);七 Adt856库函数祥解请参考Adt856说明书中的库函数列表, Adt856与Adt850库函数祥解不同之处1. Adt856库函数的输入参数中若要求输入轴号轴号的范围可为1-6分别对应为X 轴Y 轴Z 轴W 轴U 轴V 轴 2 int adt856_initial()的功能及用法与int adt850_initial()相同4 int adt856_end()的功能及用法与int adt850_end()相同5 六轴直线插补int inp_move6(int cardno,long pulse1,long pulse2,long pulse3,long pulse4,long pulse5,long pulse6)cardno 卡号pulse1, pulse2,pulse3,pulse4,pulse5, pulse6X-Y-Z-W-U-V轴移动的相对距离返回值0正确1错误注意六轴插补的速度以X 轴速度为基准Z与U轴的倍率及驱动速度应设置和X 轴的倍率及驱动速度相同Z与U轴的初速度应设置成与X轴的驱动速度一样不是X 轴的初始速度Y W V无须设定第 17 页共 17 页。
ecut运动控制卡使用手册

e-Cut运动控制卡使用手册Ver: 1.1e-cut 控制卡特点:支持Mach3所有版本,包括目前最新版Mach3R3.042.040。
支持所有Windows 版本,包括目前最新版Windows7。
USB 无需安装驱动,所有Windows版本即插即用。
全面支持USB 热插拔,随时监测USB 连线状态,Mach3工作中,USB 电缆拔出再插上,也可正常连线。
支持4轴联动,包括点动4轴联动。
支持自动对刀,电子手轮,软件限位,软件消回差功能。
48M 速度,无需PC 介入,信号由运动控制卡独立完成处理,确保您拥有真正地实时性和可靠性。
拥有800KHz 输出,接伺服/步进。
拥有状态指示灯,可提示USB 连线,Mach3连线,运行中,各类状态一目了然。
拥有16个输入指示灯,清楚显示信号输入状态。
拥有测速功能,主轴实际转速在Mach3界面中实时显示,采用外部12V-24V 直流电源,达到USB和外部端口真正的隔离,并且外部接口不用USB 供电,让系统工作更稳定。
采用10Mhz 高速光耦9个,通用光耦25个,总计光耦达到34个,隔离所有输入/输出,安全隔离距离达2.5mm。
精准的0-10V 模拟量输出,减少外部器件,主轴速度更稳定,5V 下拉的PWM 输出口,提供PWM 调速端口。
4层电路板精心布线,唯选优质器件,制作精良。
e -C u t使用手册目录运动控制卡配线示意图外形及安装尺寸1.Mach3的软件安装2.Mach3的软件配置3.运动控制卡的硬件安装B 运动控制卡的引脚功能描述B 运动控制卡的接线图6.外部倍率旋钮7.主轴调速模拟量输出8.主轴测速功能9.自动对刀10.电子手轮11.插补系数设置版本更新记录e -C u te -C u te -C u t1Mach3的软件安装1.1Mach3软件下载与安装e-cut 控制卡是基于Mach3加工软件的USB 接口的3/4轴外部运动控制卡。
最新版Mach3官方网站下载地址:/downloads.php进入官方网站后,点击Mach3下载:如下图中红圈所示e -C u t安装Mach3时,没有并口的电脑,请不要安装并口驱动,以免电脑出现蓝屏现象。
雷赛3800卡运动控制卡说明书

雷赛3800卡运动控制卡说明书雷赛DMC3800八轴高性能点位卡特点概述:八轴伺服/步进电机控制;八轴增量式编码器。
优秀的PVT规划;高速位置锁存\比较及触发。
丰富的IO控制与延时翻转;优秀的T型、S型速度曲线。
在线变速、在线变位置;简单直线插补、圆弧插补;总线扩展。
功能特性:DMC3000系列高级点位控制卡,是雷赛智能推出的功能丰富、性能优良的高性能脉冲型点位控制卡。
可控制1-8轴伺服或步进电机,每轴最高频率4MHz,支持S型曲线,在线变速/变位置,PVT,简单直线插补,圆弧插补,高速位置锁存,高速位置比较输出,编码器反馈等高级点位功能。
位置指令可用单脉冲(脉冲+方向)或双脉冲(CW脉冲+CCW脉冲)方式输出,可以是单端或者差分式,适合控制各种接口的伺服、步进及其组合。
另外控制卡本身自带多路通用I/O口,能满足大部分应用场合的I/O需求。
同时,支持CAN 总线I/O扩展,通过外接总线模块也可满足大批量I/O点数的场合,方便控制系统的I/O扩展与升级。
该系列产品配备有WINDOWS系统下的动态链接库,方便编写自己的应用软件,还提供了功能丰富、界面友好的MOTION3000调试软件,无需编程即可测试控制卡接口及电机驱动系统。
卓越的运动控制性能优秀的PVT规划轻松调用内置PVT函数,您只需要输入位置、时间或位置、速度、时间参数就能实现复杂的轨迹规划,有效缩短开发时间,让应用开发变得更简单。
优秀的速度控制初速度、加速时间和停止速度、减速时间可独立设置,对称和非对称的T型、S型速度控制功能,加减速快、平顺稳定。
在线变速、在线变位置速度模式下,T型/S型在线变速(同向/反向);位置模式下,在线变速/变位置,让速度控制、位置控制更加智能、快捷。
直线插补DMC3000系列运动控制卡支持简单直线插补功能,插补速度快,精度高,最大位置误差在1个脉冲内。
圆弧插补DMC3000系列运动控制卡支持简单圆弧插补功能,插补速度快,精度高,最大位置误差在1个脉冲内。
MACH4控制卡-MKX-M4(标准版)说明书
MACH4控制卡适合系统:MACH4运动控制系统MK3-M4:带USB 接口的,3轴运动控制卡MK4-M4:带USB 接口的,4轴运动控制卡MK6-M4:带USB 接口的,6轴运动控制卡型号标准卡:184x127x 30mmMKX-M4(标准版)说明书USB MOTION C ARDmodel :MK4-M4System :MACH4QC :012017-4-13MACH4 USB 4-axis Card 电源0V电源24V特点描述支持Mach4 个人爱好者版本,只适合Windows 操作系统支持主轴速度反馈功能,支持轴差分输出USB 无需安装驱动,所有Windows 版本即插即用。
全面支持USB 热插拔,随时监测USB 连线状态,Mach4工作中,USB 电缆拔出再插上,也可正常连线。
支持最多6轴联动,包括点动6轴联动。
(根据型号不同,支持轴数不同)拥有2000K Hz 的脉冲输出,支持伺服/步进电机。
拥有状态指示灯,可提示USB 连线状态,Mach4连线状态,运行中,各类状态一目了然。
拥有16个输入口,8个输出口,支持扩展输入输出口所有IO 口全隔离,抗干扰强,性能稳定支持主轴PWM 调速输出;支持主轴脉冲+方向输出;支持主轴0到10V 模拟电压调速输出。
184x127x30 毫米,铝外壳,屏蔽干扰,稳定可靠。
★-1-★★★★★★★★★★USB MOTION CA RDmodel :MK4-M4System :MACH4QC :012017-4-13MACH4 USB 4-axis Card 电源0V电源24V端口说明图变频器调速接口变频器调速信号模拟地线变频器调速输入:0-10V 变频器10V 输出5V P W M 信号输出X 轴原点信号(输入0)Y 轴原点信号(输入1)Z 轴原点信号(输入2)A 轴原点信号(输入3)对刀信号输入(输入4)U S B 接口16个输入信号接口外接电源输入:24V外接电源输入:地线方向+脉冲+外接电源输入X 轴工作指示灯状态说明:快闪:表示工作正常输出:0V工作指示灯慢闪:表示控制卡工作正常, 驱动安装不正常不亮:表示控制卡坏了输出0V输出24V 输入5输入6输入7输入8输入9输入10输入11输入12输入13输入14输入15输出8输出3输出4输出5输出6输出76个输出口方向+脉冲+Y 轴Z 轴A 轴变频器正转信号变频器反转信号变频器数字信号地主轴速度反馈输出:24V-2-脉冲-方向-脉冲-方向-方向+脉冲+脉冲-方向-方向+脉冲+脉冲-方向-输出:24V输出:0V24V 指示灯USB MOTION CA RDmodel :MK4-M4System :MACH4QC :012017-4-13MACH4 USB 4-axis Card 电源0V电源24V应用接线图备注:如果出现开启变频器,控制卡工作不正常,是因为变频器干扰引起的;请更换变频器 根据我们的测试,推荐使用市场上的如下品牌变频器:贝斯特。
PCI运动控制卡快速入门手册
PCI-运动控制卡-快速入门手册————————————————————————————————作者:————————————————————————————————日期:PCI-1240快速入门手册目录第一章PCI-1240 安装1.1 1.2 PCI-1240 Driver 与Utility 安装PCI-1240 硬件安装第二章PCI-1240 与驱动器接线2.1 PCI-1240 针脚描述2.2 PCI-1240 与驱动器连接第三章PCI-1240 测试3.1 PCI-1240 Utility 使用第四章PCI-1240 软件编程4.1 PCI-1240 软件编程第五章附录1. PCI-1240 Utility 界面说明:第一章PCI-1240安装1.1 PCI-1240 Driver与Utility安装在使用pci-1240 之前必须安装pci-1240 驱动,驱动安装步骤:A) 将研华提供的驱动光盘置于光驱中,出现如下画面:B) 点击Installation 选项,出现如下画面:C) 点击Individual Driver,出现如下画面:动;1.2 PCI-1240 硬件安装:1) PCI-1240 跳线设置:I. BoardID 设置:通过设置板卡上DIP 开关可以设置PCI-1240的BoardID 从0-15。
II. JP1~8 设置nP+P,nP+N 和nP-P,nP-N 输出引脚为+5v 输出还是差分输出,缺省设置为差分输出;如图所示:注意:设置为+5v单端输出时,要防止外部噪声窜入PCI-1240.III. JP9 Enable/Disable 紧急停止功能,如图所示:2) 单块板卡安装:I. 关闭计算机电源;II. 将PCI-1240 卡插在计算机的任一PCI 槽上;III. 重新开启计算机,系统会自动寻找到PCI-1240,根据提示点击Next 添加PCI-1240 驱动;3) 多块板卡安装:I. 将板卡的BoardID DIP 开关设置成不同的值(不能有重复);II. 先将一块板卡插在一PCI 槽,根据单块板卡安装方法,添加驱动;第二章PCI-1240与驱动器接线2.1 PCI-1240针脚描述:图2-1 PCI-1240 针脚定义图针脚名称参考地输入/输出说明VEX * 输入外部电源(12-24v)表2-1 PCI-1240 针脚定义说明EMG * 输入紧急停止信号(所有轴)XLMT+ * 输入X 轴+方向限位控制信号输入XLMT-* 输入X 轴-方向限位控制信号输入XIN1 * 输入X 轴减速/立即停止信号XIN2 * 输入X 轴减速/立即停止信号XIN3 * 输入X 轴减速/立即停止信号YLMT+ * 输入Y 轴+方向限位控制信号输入YLMT-* 输入Y 轴-方向限位控制信号输入YIN1 * 输入Y 轴减速/立即停止信号YIN2 * 输入Y 轴减速/立即停止信号YIN3 * 输入Y 轴减速/立即停止信号XINPOS * 输入X 到位输入信号XALARM * 输入X 轴伺服驱动器错误报警信号XECAP * 输入X 轴编码器A 相+输入XECAN * 输入X 轴编码器A 相-输入XECBP * 输入X 轴编码器B 相+输入XECBN * 输入X 轴编码器B 相-输入XINOP * 输入X 轴编码器Z 相+输入XINON * 输入X 轴编码器Z 相-输入YINPOS * 输入Y 到位输入信号YALARM * 输入Y 轴伺服驱动器错误报警信号YECAP * 输入Y 轴编码器A 相+输入YECAN * 输入Y 轴编码器A 相-输入YECBP * 输入Y 轴编码器B 相+输入YECBN * 输入Y 轴编码器B 相-输入YINOP * 输入Y 轴编码器Z 相+输入YINON * 输入Y 轴编码器Z 相-输入XEXOP+ * 输入X 轴慢进+向输入XEXOP- * 输入X 轴慢进-向输入YEXOP+ * 输入Y 轴慢进+向输入YEXOP- * 输入Y 轴慢进-向输入GND * * 接地脚XOUT4 GND 输出X 轴通用输出脚XOUT5 GND 输出X 轴通用输出脚XOUT6 GND 输出X 轴通用输出脚XOUT7 GND 输出X 轴通用输出脚sXP+P GND 输出X 轴CW/Pulse +输出XP+N GND 输出X 轴CW/Pulse -输出XP-P GND 输出X 轴CCW/DIR +输出XP-N GND 输出X 轴CCW/DIR -输出GND * * 接地脚YOUT4 GND 输出Y 轴通用输出脚YOUT5 GND 输出Y 轴通用输出脚YOUT6 GND 输出Y 轴通用输出脚YOUT7 GND 输出Y 轴通用输出脚sYP+P GND 输出Y 轴CW/Pulse +输出YP+N GND 输出Y 轴CW/Pulse -输出YP-P GND 输出Y 轴CCW/DIR +输出YP-N GND 输出Y 轴CCW/DIR -输出VEX * 输入外部电源(12-24v)ZLMT+ * 输入Z 轴+方向限位控制信号输入ZLMT-* 输入Z 轴-方向限位控制信号输入ZIN1 * 输入Z 轴减速/立即停止信号ZIN2 * 输入Z 轴减速/立即停止信号ZIN3 * 输入Z 轴减速/立即停止信号ULMT+ * 输入U 轴+方向限位控制信号输入ULMT-* 输入U 轴-方向限位控制信号输入UIN1 * 输入U 轴减速/立即停止信号UIN2 * 输入U 轴减速/立即停止信号UIN3 * 输入U 轴减速/立即停止信号ZINPOS * 输入Z 到位输入信号ZALARM * 输入Z 轴伺服驱动器错误报警信号ZECAP * 输入Z 轴编码器A 相+输入ZECAN * 输入Z 轴编码器A 相-输入ZECBP * 输入Z 轴编码器B 相+输入ZECBN * 输入Z 轴编码器B 相-输入ZINOP * 输入Z 轴编码器Z 相+输入ZINON * 输入Z 轴编码器Z 相-输入UINPOS * 输入U 到位输入信号UALARM * 输入U 轴伺服驱动器错误报警信号UECAP * 输入U 轴编码器A 相+输入UECAN * 输入U 轴编码器A 相-输入UECBP * 输入U 轴编码器B 相+输入UECBN * 输入U 轴编码器B 相-输入UINOP * 输入U 轴编码器Z 相+输入UINON * 输入U 轴编码器Z 相-输入ZEXOP+ * 输入Z 轴慢进+向输入ZEXOP- * 输入Z 轴慢进-向输入UEXOP+ * 输入U 轴慢进+向输入UEXOP- * 输入U 轴慢进-向输入GND * * 接地脚ZOUT4 GND 输出Z 轴通用输出脚ZOUT5 GND 输出Z 轴通用输出脚ZOUT6 GND 输出Z 轴通用输出脚ZOUT7 GND 输出Z 轴通用输出脚sZP+P GND 输出Z 轴CW/Pulse +输出ZP+N GND 输出Z 轴CW/Pulse -输出ZP-P GND 输出Z 轴CCW/DIR +输出ZP-N GND 输出Z 轴CCW/DIR -输出GND * * 接地脚UOUT4 GND 输出U 轴通用输出脚UOUT5 GND 输出U 轴通用输出脚UOUT6 GND 输出U 轴通用输出脚UOUT7 GND 输出U 轴通用输出脚sUP+P GND 输出U 轴CW/Pulse +输出UP+N GND 输出U 轴CW/Pulse -输出UP-P GND 输出U 轴CCW/DIR +输出UP-N GND 输出U 轴CCW/DIR -输出2.2 PCI-1240与驱动器连接:1、与UPK 步进电机驱动器连接:说明:外加DC24v 电源,采用CW/CCW 驱动方式驱动,温度报警通过XALARM 引脚输入。
leetro MPC03LX运动控制卡 说明书

MPC03-LV 激光切割控制器接线说明(1.0 版)
3.1.2 双路模拟量独立功率控制
说明: 1, 上图中的激光电源引脚定义由于不同厂家可能会有不同,请确认后连接; 2, 激光电源需要与 MPC03LX 控制器共地; 3, 上图中 MPC03LX 控制器激光开关控制信号为低电平有效的接法; 4, 52 引脚与 50 引脚输出 0~5V 模拟量,并且随软件设置而独立;
MPC03LX 卡的脉冲/方向输出信号,作为步进电机或数字式伺服电机驱动器的 控制信号,脉冲信号的频率决定电机的转速,脉冲信号的个数决定电机的转角。脉 冲和方向信号的接线方法如图 1.2 所示。
MPC03LX 卡取消了编码器反馈输入信号。
1
MPC03-LV 激光切割控制器接线说明(1.0 版)
2 两轴步进控制系统示例
2 轴原点
4 轴负限位
备注 输入 输入 输入 输入 输入 输入 输入 输入 输入 输入 输入 输入 输入 输入 输入 输入 输出 输出 输入 保留 输入 保留 输入 保留 输入
X62 的编号 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54
定义 通用输入 1 通用输入 2 通用输入 3 通用输入 4 通用输入 5 通用输入 6 通用输入 7 通用输入 8 通用输入 9 通用输入 10 通用输入 11 通用输入 12 通用输入 13 通用输入 14 通用输入 15 通用输入 16 24V 电源负 24V 电源正 2 轴负限位
2 轴正限位
4.2 限位开关接线图
4.2.1 限位开关低电平有效
说明: 1, 上图中限位开关接控制器输出电源地; 2, 上图中限位开关信号为低电平有效(通过软件设置); 3, 用户可以根据需要装接限位开关,如不需要则将该引脚悬空或者接控制器输出
运动控制卡说明书
运动控制卡说明书篇一:HY-JK02-M 5轴运动控制卡使用说明书HY-JK02-M 5-axis interface board manual Thank you for choosing our products,For your use of NC products better and faster,Please read this manualIn the test machine, note the following before 1, note that using the 5V power supply2, determine the stepper driver works (Model0) 3, to determine the drive wiring stepSecond, "the definition of the pin:5V 1A power supply, please take more than switching power supplies, power input received indicated on the map interfaceSpindle motor control is controlled via the parallel port PIN1. Spindle motor voltage must comply with the supply voltage range. Three "MACH software to useFigure 1Figure 1, open the MACH3 software, then select OK now mach3MILLFigure 2MACH3 open the interface shown in Figure 2, the action of commonly used button above, here we configure the MACH software.篇二:e cut 雕刻机运动控制卡使用说明您在收到板子之后。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.3.1 信号接口定义
PCI_SERVO4 卡 SISC100 的接口定义为:
编号
名称
定义
编号
名称
定义
51 ~52 53 54 55 56 57 58 59 60 61 62 63 64 65 66
67
68 69 70 71 72 73 74 75
EX5VX
X 轴+5V 外部电源正
50
GNDX
X 轴+5V 外部电源地
49
SDIRX
X 轴方向输出
48
SDATAX X 轴脉冲输出
47
XENABLE X 轴使能输出
46
XINPOS
X 轴到位信号输入
45
XSTATE
X 轴的准备状态
44
NC
43
EX5VY
Y 轴+5V 外部电源正 ZH 42
GNDY
Y 轴+5V 外部电源地
41
SDIRY
Y 轴方向输出
40
SDATAY Y 轴脉冲输出
第一章 概述
1.1 PCI_SERVO4 四轴运控卡的软硬件简介
PCI_SERVO4 四轴运控卡是基于 PC 机 PCI 总线的步进电机或数字式伺服电机的上位控制 单元,它与 PC 机构成主从式控制结构:PC 机负责人机交互界面的管理和控制系统的实时监 控等方面的工作(例如键盘和鼠标的管理、系统状态的显示、控制指令的发送、外部信号的监 控等等);该卡完成运动控制的所有细节(包括脉冲和方向信号的输出、自动升降速的处理、 原点和限位等信号的检测等等)。每块该卡可控制 4 轴步进电机或数字式伺服电机,并支持多 卡共用,以实现多于四个运动轴的控制;每轴均可输出脉冲和方向信号,以控制电机的运转; 同时,可外接原点、减速、限位等开关信号,以实现回原点、保护等功能,这些开关信号由该 卡自动检测并作出反应。另外,该卡还提供了适用于伺服系统的伺服使能和偏差清零信号接口, 以及供用户使用的通用 I/O 接口。
驱动的使用方法可以参考示例程序。
2.2.2 运动函数库安装和使用
可以参考 4.1.2 章的 DLL 的显示链接和示例程序。
2.3 PCI_SERVO4 接口
PCI_SERVO4 控制卡采用 100 芯 SISC 接口,外接线可采用屏蔽线缆,以提高控制卡的抗 干扰能力。其中开关量信号(原点、减速、限位以及 I/O 信号等)采用 5DCV 光电隔离;脉冲 量信号(脉冲、方向、编码器反馈等)采用 5DCV 高速光电隔离。
39
YENABLE Y 轴使能输出
38
YINPOS
Y 轴到位信号输入
37
YSTATE
36
NC
35
通用输出(与 OS2 构成开关
OS1
34
型输出)
OS3
通用输出(与 OS4)
33
OS5
通用输出(与 OS6)
32
OS7
通用输出(与 OS8)
31
OS9
通用输出(与 OS10)
30
OS11
通用输出(与 OS12)
金手指
PCI 总 线
PCI接口电路
运动控制芯片和外围电路
轴数据 DB
PCI 接口芯片
AB
I/O
运动控制
专用芯片
CB
光耦
光耦
驱 动 器
编
码
电机
器
ERVO4 的技术特性和使用范围
1.3PCI_S
PCI_SERVO4 控制卡主要特征有:开放式结构、使用简便、功能丰富、可靠性高等。
PCI_SERVO4 的特征体现在硬件和软件两个方面:在硬件方面采用 PC 机的 PCI 总线方式,适
该卡采用先进的专用控制芯片,具有梯形及 S 形升降速曲线,最高输出频率可达 4MHz, 带有编码器反馈端口,主要适用于数字式交流伺服系统或闭环的步进电机控制系统。
该卡配备了功能强大、内容丰富的运动控制驱动软件工具。该卡在插补算法和运动函数的 执行效率方面采用了更有效的方法,提高了插补精度、插补速度和实时性。这些软件工具主要 分为示范软件和运动函数库两大类。利用 PCI_SERVO4 的示范软件既可以很快地熟悉该卡的 软、硬件功能,又可以方便快捷地测试执行电机及驱动系统在完成各种运动时的性能特性。该 卡运动函数库用于二次开发,用户只要用 VC++或 Visual Basic 等支持 DLL 调用的开发工具 编制所需的用户界面程序,并把它与该卡运动库链接起来,就可以开发出自己的控制系统,例 如:数控系统、检测设备、自动生产线等。该卡的运动函数库能够完成与运动控制有关的复杂 细节(比如:升降速、直线插补、圆弧插补等),这样就可以大大缩短控制系统的开发周期。
29
OS13
通用输出(与 OS14)
28
OS15
通用输出(与 OS16)
27
NC
26
EX5VX X 轴+5V 外部电源正
GNDX
X 轴+5V 外部电源地
XALRM X 轴报警输入
XLMTP X 轴正向限位输入
XLMTM X 轴负向限位输入
XORGIN 回原点
XENCA X 轴编码器 A/脉冲+入
XENCB X 轴编码器 B/脉冲-入
14
ZALARM Z 轴报警输入
13
ZLMTP Z 轴正向限位输入
12
ZLMTM Z 轴负向限位输入
11
ZORGIN
10
ZENCA Z 轴编码器 A/脉冲+入
9
ZENCB Z 轴编码器 B/脉冲-入
8
EX5VU U 轴+5V 外部电源正
7
GNDU
U 轴+5V 外部电源地
6
UALRM U 轴报警输入
5
打标机、绕线机;
医疗设备;
包装机械、纺织机械;
PCI_SE
等等。
1.4 PCI_SERVO4 的运动控制功能
PCI_SERVO4 控制卡的运动控制功能主要取决于运动函数库。运动函数库为单轴及多轴的 步进或伺服控制提供了许多运动函数:单轴运动、多轴独立运动、多轴插补运动等等。
1.4.1 单轴运动控制
19
IOINP7 通用输入 7+
18
IOINN7 通用输入 7-
84
NC
85
EX5VZ
Z 轴+5V 外部电源正
86
GNDZ
Z 轴+5V 外部电源地
87
SDIRZ
Z 轴方向输出
88
SDATБайду номын сангаасZ
Z 轴脉冲输出
89
ZENABLE Z 轴使能输出
90
ZINPOS
Z 轴到位信号输入
91
ZSTATE
92
NC
93
可编程的梯形曲线运动模式,实现高精度的位置控制。
具有捕获原位的功能,实现高精度的位置锁存。
2. 输入输出
4 路脉冲/方向或正脉冲/负脉冲信号输出接口,速度最高为 4MHz。
4 路光电隔离驱动器使能信号输出接口。
4 路光电编码器信号接口,32 位计数器,光电隔离施密特缓冲输入。
8 路光电隔离限位开关信号输入接口。
OS6
通用输出(与 OS5)
OS8
通用输出(与 OS7)
OS10
通用输出(与 OS9)
OS12
通用输出(与 OS11)
OS14
通用输出(与 OS13)
OS16
通用输出(与 OS15)
NC
76
IOINP2
77
IOINN2
78
IOINP4
79
IOINN4
80
IOINP6
81
IOINN6
82
IOINP8
83
用范围广,卡上无需进行任何跳线设置,所有资源自动配置,在 Windows98 及 Windows2000
操作系统中支持即插即用,使用非常方便;PCI_SERVO4 的接线方式采用 SISC 型插头,可使
用屏蔽线缆,并且所有的输入、输出信号均用光电隔离,提高了控制卡的可靠性和抗干扰能力;
在软件方面提供了丰富的运动控制函数库,以满足不同的应用要求。用户只需根据控制系统的
EX5VU
U 轴+5V 外部电源正
94
GNDU
U 轴+5V 外部电源地
95
SDIRU
U 轴方向输出
96
SDATAU U 轴脉冲输出
97
UENABLE U 轴使能输出
98
UINPOS
U 轴到位信号输入
99
USTATE
100 NC
17
NC
16
EX5VZ Z 轴+5V 外部电源正
15
GNDZ
Z 轴+5V 外部电源地
为了保证安全,插卡时应按照下列步骤操作: 1) 关 PC 机,并切断电源; 2) 打开 PC 机箱,选择未用的扩展槽,并插入 PCI_SERVO4 控制卡; 3) 固定 PCI_SERVO4 控制卡,并盖好 PC 机; 4) 连接 PCI_SERVO4 与电机驱动器等; 5) 接上电源,并启动 PC 机。
要求编制人机界面,并调用 PCI_SERVO4 运动函数库中的指令函数,就可以开发出既满足要
求又成本低廉的多轴运动控制系统。
PCI_SERVO4 的技术指标主要有:
1. 运动方式
单轴独立运动,速度控制,加速度控制,加速度率控制,任意三轴高精度插补联
动,位插补模式运动。
可编程 S 曲线运动模式,实现平滑的运动过程。