超声波测距模组使用说明书V2.0
凌阳超声波测距
//===================================================== ===================// 文件名称:ultrasonic_App.c// 功能描述:超声波测距模组V2.0的功能接口函数// 维护记录:2006-02-21 V2.0//===================================================== ===================#include "SPCE061A.h"#define LONG_SEND_TIMER 1000 //中距测距时的40KHz信号发射时长#define LONG_SEND_TIMER2 3000 //中距测距的补充测距时的40KHz信号发射时长#define LONG_WAIT_DELAY 600 //中距测距的防余波干扰延时时长#define LONG_WAIT_DELAY2 1500 //中距测距的补充测距时的防余波干扰延时时长#define LONG_RES_ADD 0x00B0 //中距测距的结果补偿值#define LONG_RES_ADD2 0x0220 //中距测距的补充测距时的结果补偿值#define LOW_SEND_TIMER 250 //短距测距时的40KHz信号发射时长#define LOW_SEND_TIMER2 1000 //短距测距的补充测距时的40KHz信号发射时长#define LOW_WAIT_DELAY 180 //短距测距的防余波干扰延时时长#define LOW_WAIT_DELAY2 400 //短距测距的补充测距时的防余波干扰延时时长#define LOW_RES_ADD 0x0034 //短距测距的结果补偿值#define LOW_RES_ADD2 0x00B0 //短距测距的补充测距时的结果补偿值unsigned int Counter_buf; //超声波测距当中,用于保存TimerB计数的变量,相当于时长unsigned int EXT1_IRQ_flag=0; //外部中断标志变量,用于EXT1的IRQ中断程序和测距程序同步//===================================================== ===================// 语法格式:void Initial_ult(void)// 实现功能:超声波测距模组的初始化子程序// 参数:无// 返回值:无//===================================================== ===================void Initial_ult(void){unsigned int uiTemp;// 初始化端口主要是IOB8和IOB9uiTemp = *P_IOB_Dir;uiTemp = uiTemp|0x0200;uiTemp = uiTemp&0xfeff;*P_IOB_Dir = uiTemp;uiTemp = *P_IOB_Attrib;uiTemp = uiTemp|0x0200;uiTemp = uiTemp&0xfeff;*P_IOB_Attrib = uiTemp;uiTemp = *P_IOB_Buffer;uiTemp = uiTemp|0x0300;*P_IOB_Data = uiTemp;}//===================================================== ===================// 语法格式:void Delay_ult(unsigned int timers)// 实现功能:超声波测距模组的延时子程序// 参数:unsigned int timers 延时的时长(仅是一个相对量)// 返回值:无//===================================================== ===================void Delay_ult(unsigned int timers){unsigned int i;for(i=0;i<timers;i++){__asm("nop");}}//===================================================== ===================// 语法格式:unsigned int Resoult_ult(unsigned int Counter)// 实现功能:超声波测距模组的测距数据处理程序,将TimerB的计数值换算为距离// 参数:Counter 需要换算的计数值// 返回值:计算后的距离,厘米为单位//===================================================== ===================unsigned int Resoult_ult(unsigned int Counter){unsigned int uiTemp;unsigned long ulTemp;ulTemp = (unsigned long)Counter*33500;ulTemp = ulTemp/196608;ulTemp = ulTemp>>1; //除二uiTemp = (unsigned int)ulTemp;return uiTemp;}//===================================================== ===================// 语法格式:unsigned int measure_ult(unsigned int type)// 实现功能:超声波测距模组的测距程序,完成一次测距// 参数:type 选择测距类型,// type=1 中距测距// type=0 短距测距// 返回值:所测得的距离,以厘米为单位//===================================================== ===================unsigned int measure2_ult(unsigned int type);unsigned int measure_ult(unsigned int type){unsigned int Exit_flag = 1;unsigned int uiTemp;unsigned int uiResoult;unsigned int uiSend_Timer,uiWait_Timer,uiRes_Add;unsigned int uiSystem_Clock;uiSystem_Clock = *P_SystemClock; //将当前的系统时钟设置暂时保存起来*P_SystemClock = 0x0088; //将系统时钟设置为49MHz,分频比为1,强振模式if(type) //根据type即测距类型,选择不同的测距参数{uiSend_Timer = LONG_SEND_TIMER;uiWait_Timer = LONG_WAIT_DELAY;uiRes_Add = LONG_RES_ADD;}else{uiSend_Timer = LOW_SEND_TIMER;uiWait_Timer = LOW_WAIT_DELAY;uiRes_Add = LOW_RES_ADD;}*P_TimerB_Data = 0xfed2;*P_TimerB_Ctrl = 0x03c0; //enable 40KHz outDelay_ult(uiSend_Timer); //delay for send the signal*P_TimerB_Ctrl = 0x0006; //stop 40KHz out*P_TimerB_Data = 0x0000;*P_TimerB_Ctrl = 0x0001; //TimerB work as a counter at 192KHzwhile(*P_TimerB_Data<uiWait_Timer) //等待一定时间后再打开TimerA的计数(来源于EXT1){ //以避开余波的干扰*P_Watchdog_Clear = 0x0001;}*P_INT_Clear = 0x0100; //开中断前先清中断*P_INT_Ctrl = *P_INT_Ctrl_New|0x0100;*P_INT_Clear = 0xffff; //清除中断发生标志__asm("IRQ ON"); //打开总中断使能EXT1_IRQ_flag = 0; //TimerA的溢出中断的标志变量置0while(Exit_flag){if(EXT1_IRQ_flag==1) //当该变量在timerA的FIQ中断中被置1时表示接收到了回波{Exit_flag = 0; //exitCounter_buf = Counter_buf+uiRes_Add;//计数值加上一定的调整数据uiResoult = Resoult_ult(Counter_buf);//对计数值进行处理,得出距离值}if(*P_TimerB_Data>10000) //如计数值大于10000,表示超时{Exit_flag = 0; //exituiResoult = measure2_ult(type);//再进行一次补充的测距,将会加长40KHz信号发射的量*P_TimerB_Ctrl = 0x0006; //stop timerB}uiTemp = *P_TimerB_Data;*P_Watchdog_Clear = 0x0001;}*P_INT_Ctrl = *P_INT_Ctrl_New&(~0x0100); //关掉外部中断__asm("IRQ OFF"); //关掉总中断*P_SystemClock = uiSystem_Clock; //恢复系统时钟的设置return uiResoult;}//===================================================== ===================// 语法格式:void EXT1_IRQ_ult(void)// 实现功能:超声波测距模组的测距程序的EXT1中断服务程序,在EXT1的IRQ中断// 中调用// 参数:无// 返回值:无//===================================================== ===================void EXT1_IRQ_ult(void){Counter_buf = *P_TimerB_Data; //save the timerB counter*P_TimerB_Ctrl = 0x0006; //stop timerB*P_INT_Ctrl = *P_INT_Ctrl_New&(~0x0100); //关掉外部中断*P_INT_Clear = 0xffff; //清除中断发生标志EXT1_IRQ_flag = 1; //通知测距程序,外部中断已发生}//===================================================== ===================// 语法格式:unsigned int measure2_ult(void)// 实现功能:补充进行一次远距的测量,以保证能够获取测量结果// 参数:type 选择测距类型,// type=1 中距测距// type=0 短距测距// 返回值:所测得的距离,以厘米为单位//===================================================== ===================unsigned int measure2_ult(unsigned int type){unsigned int Exit_flag = 1;unsigned int uiResoult;unsigned int uiSend_Timer,uiWait_Timer,uiRes_Add;*P_TimerA_Ctrl = 0x0006; //stop TimerA*P_INT_Ctrl = *P_INT_Ctrl_New&(~0x0100); //关掉外部中断__asm("IRQ OFF"); //关掉总中断*P_INT_Clear = 0xffff; //清除掉中断发生标志if(type) //根据type即测距类型,选择不同的测距参数{uiSend_Timer = LONG_SEND_TIMER2;uiWait_Timer = LONG_WAIT_DELAY2;uiRes_Add = LONG_RES_ADD2;}else{uiSend_Timer = LOW_SEND_TIMER2;uiWait_Timer = LOW_WAIT_DELAY2;uiRes_Add = LOW_RES_ADD2;}*P_TimerB_Data = 0xfed2;*P_TimerB_Ctrl = 0x03c0; //enable 40KHz outDelay_ult(uiSend_Timer); //delay for send the signal*P_TimerB_Ctrl = 0x0006; //stop 40KHz out*P_TimerB_Data = 0x0000;*P_TimerB_Ctrl = 0x0001; //TimerB work as a counter at 192KHzwhile(*P_TimerB_Data<uiWait_Timer) //等待一定时间,以避开余波的干扰{*P_Watchdog_Clear = 0x0001;}*P_INT_Ctrl = *P_INT_Ctrl_New|0x0100;//打开外部中断*P_INT_Clear = 0xffff; //清除中断发生标志__asm("IRQ ON"); //打开总中断使能EXT1_IRQ_flag = 0; //TimerA的溢出中断的标志变量置0while(Exit_flag){if(EXT1_IRQ_flag==1) //当该变量在timerA的FIQ中断中被置1时表示接收到了回波{Exit_flag = 0; //exitCounter_buf = Counter_buf+uiRes_Add;//计数值加上一定的调整数据uiResoult = Resoult_ult(Counter_buf);//对计数值进行处理,得出距离值}if(*P_TimerB_Data>10000) //如计数值大于10000,表示超时{Exit_flag = 0; //exituiResoult = 0; //error return data 0*P_TimerB_Ctrl = 0x0006; //stop timerB}}return uiResoult;}//===================================================== ===================// 语法格式:unsigned int measure_Times(unsigned int type)// 实现功能:组合进行共6次的测距程序,包括对6次测量结果的取平均值处理// 参数:type 选择测距类型,// type=1 中距测距// type=0 短距测距// 返回值:所测得的距离,以厘米为单位//===================================================== ===================unsigned int measure_Times(unsigned int type){unsigned int uiResoult=0,uiMeasure_Index=0,i;unsigned int uiTemp_buf[6],uiTemp;unsigned int uiSystem_Clock;for(;uiMeasure_Index<6;uiMeasure_Index++){ //循环进行四次测量uiTemp = measure_ult(type); //进行一次测量,测量类型由type决定if(uiMeasure_Index==0) //如果为本次测量的第一次测距,则直接保存在缓冲区第一个单元uiTemp_buf[0] = uiTemp;else{ //否,则对结果进行比较,进行排序,从大到小排i = uiMeasure_Index;while(i) //以下为排序的代码{if(uiTemp>uiTemp_buf[i-1]){uiTemp_buf[i] = uiTemp_buf[i-1];uiTemp_buf[i-1] = uiTemp;}else{uiTemp_buf[i] = uiTemp;break; //退出排序}i--;}}//两次测量之间的延时等待,利用以下代码软仿真时的cycles数结合设置的CPUCLK 进行计算,大概72msuiSystem_Clock = *P_SystemClock; //将之前的系统时钟的设置用变量保存*P_SystemClock = 0x000b; //设置为FSYS=24.576MHz 分频比为8 for(i=0;i<5;i++){Delay_ult(1000); //调用延时程序*P_Watchdog_Clear = 0x0001;}*P_SystemClock = uiSystem_Clock; //恢复系统时钟设置//此处延时结束}//对6次测距的结果进行处理if(uiTemp_buf[5]==0){ //如果缓冲区中的最小的测距值为0,则采用中间4个数据进行平均uiResoult = uiTemp_buf[1]+uiTemp_buf[2]+uiTemp_buf[3]+uiTemp_buf[4];uiResoult = uiResoult/4;}else{ //否则就取后5个数据进行平均uiResoult =uiTemp_buf[1]+uiTemp_buf[2]+uiTemp_buf[3]+uiTemp_buf[4]+uiTemp_buf[5];uiResoult = uiResoult/5;}return uiResoult;}。
超声波测距模块_HC-SR04_ 用户手册-V2.0

超声波测距模块(HC-SR04)用户手册版本号:V2.01.产品特色2.产品实物图3.接口定义4.最远探测距离调节5.模块工作原理6.应用注意事项7.模块线路图1 产品特色:1、典型工作用电压:5V2、超小静态工作电流:小于2mA3、感应角度(R3电阻越大,增益越高,探测角度越大): R3电阻为392/432,不大于15度R3电阻为472, 不大于30度4、探测距离(R3电阻可调节增益,即调节探测距离): R3电阻为392/432 2cm-450cmR3电阻为472 2cm-700cm5、高精度:可达0.3cm6、盲区(2cm)超近2产品实物图:顶部视图底部视图3 接口定义:Vcc、 Trig(控制端)、 Echo(接收端)、 Gnd本产品使用方法:控制口发一个10US以上的高电平,就可以在接收口等待高电平输出.一有输出就可以开定时器计时,当此口变为低电平时就可以读定时器的值,此时就为此次测距的时间,方可算出距离.如此不断的周期测,就可以达到你移动测量的值了。
4 最远探测距离调节:上图标志电阻即R3,可以调节最大探测距离。
R3电阻为392或432,探测距离最大4.5M 左右,探测角度小于15度;R3电阻为472,探测距离最大7M左右,探测角度小于30度;出厂默认392或432,即最大探测距离4.5M左右。
R3电阻大,接收部分增益高,检测距离大,但检测角度会相应变大,容易检测到前方旁边的物体。
当然,客户在不要求很高的测试距离的条件下,可以改小R3来减小探测角度,这时最大测距会减小。
5 模块工作原理:(1)采用IO触发测距,给至少10us的高电平信号;(2)模块自动发送8个40khz的方波,自动检测是否有信号返回;(3)有信号返回,通过IO输出一高电平,高电平持续的时间就是(4)超声波从发射到返回的时间.测试距离=(高电平时间*声速(340M/S))/2;6 应用注意事项:1:此模块不宜带电连接,如果要带电连接,则先让模块的Gnd端先连接。
HC-SR04超声波测距模块说明书

HC-SR04超声波测距模块◼产品概述HC-SR04是一款升级的超声波测距模块。
新增加UART,IIC及1-WIRE(单总线)功能,模式可以通过外围电阻设置。
2CM超小盲区,4M典型最远测距,2mA超低工作电流。
采用自研超声波测距解调芯片,使其外围更加简洁,工作电压更宽(2.8-5.5V)。
驱动采用扫频技术,减少探头本身一致性对灵敏度的影响。
内部40K驱动频率采用正温度补偿,切合探头中心频率的温度特性,减小温度影响。
外部晶振为外观兼容而放置的晶振,不起任何作用,不焊接晶振的模块价格更有优势。
◼实物图片◼主要特性⚫采用专业解调芯片⚫工作电压:2.8-5.5V⚫工作电流:2mA⚫支持GPIO,UART,IIC及1-WIRE多种接口模式,默认输出模式兼容HC-SR04⚫2CM盲区,4M典型最远测距⚫200mS周期⚫可配置各种颜色及加固型探头◼典型应用⚫玩具,机器人避障⚫液位,水位测量⚫坐姿检测⚫其它测距应用◼性能参数◼GPIO/UART/IIC/1-WIRE模式选择◼测量操作一:GPIO模式工作模式同HC-SR04。
外部MCU给模块Trig脚一个大于10uS的高电平脉冲;模块会给出一个与距离等比的高电平脉冲信号,可根据脉宽时间“T”算出:距离=T*C/2(C为声速)声速温度公式:c=(331.45+0.61t/℃)m•s-1(其中330.45是在0℃)0℃声速:330.45M/S20℃声速:342.62M/S40℃声速:354.85M/S0℃-40℃声速误差7左右。
实际应用,如果需要精确距离值,必需要考虑温度影响,做温度补偿。
如有需要,可关注我司带温补单芯片RCWL-9700。
二:UART模式UART模式波特率设置:9600N1命令返回值说明0XA0BYTE_HBYTE_MBYTE_L 输出距离为:((BYTE_H<<16)+(BYTE_M<<8)+BYTE_L)/1000单位mm0XF1公司及版本信息连接串口。
超声波测距仪说明书

湄洲湾职业技术学院超声波测距仪说明书系别: 自动化工程系年级:10级专业: 电气自动化技术姓名: 郑学号:**********导师姓名: 李志杰职称: 讲师2013年05月29日目录1 前言 (1)2 系统设计参数要求 (2)3 系统设计 (3)3.1系统设计总体框图 (3)3.2超声波测距原理 (4)3.3系统构成 (5)3.4硬件电路设计 (5)3.5传感器介绍 (6)3.5.1超声波传感器原理 (6)4 系统模块 (7)4.1超声波发射模块 (7)4.2超声波接收模块 (8)4.3LCD显示模块 (9)4.4系统印刷电路板的制作图 (9)5 系统软件设计 (10)5.1超声波测距的算法 (10)5.2程序流程图 (10)5.3超声波温度补偿子程序流程图 (11)5.4超声波测距子程序流程图 (12)5.5系统操作说明 (13)5.6系统操作注意事项 (13)参考文献 (14)致谢语 (15)系统附录 (16)附录一原理总图 (16)附录二印刷电路图 (17)附录三元件清单 (18)附录四程序流程 (19)1 前言本设计是以单片机技术为基础,实现对前方物体距离的测量。
根据超声波指向性强,能量消耗慢,在介质中传播距离远的特点,利用超生波传感器对前方物体进行感应,经过单片机中的程序对超声波传感器发射和接收的超声波信号进行分析和计算处理,最后将处理结果在LCD1602上显示。
STC89C52单片机的超声波测距系统,此系统根据超声波在空气中传播反射原理,把超声波传感器作为接口部件,利用超声波在空气中传播的时间差来测量距离,设计了一套超声波检测系统。
该系统设计主要由主控制器模块、超声波发射模块、超声波接收模块和显示模块等四个基本模块构成,用接收部分接收超声波。
本设计利用两个中断,在发射信号时,打开定时器中断0和外部中断0使定时器计时,接收到发射超声波信号时,外部中断0关闭中断,这时定时器中断0计录的时间就为超声波传播经过测距仪到前方物体的来回时间。
AJ-SR04M-超声波测距模块(单头)

一体化超声波测距模块使用说明书型号: AJ-SRO4M-T-X产品实物图:深圳市安吉电子深圳安吉电子目录>>产品概述 (2)>>产品特点 (4)>>产品应用 (4)>>技术参数 (5)产品结构图 (5)电气参数 (5)>>模块输出格式说明 (6)模式切换方法 (6)模块启动流程 (6)模式1工作方式 (7)模式2工作方式 (8)模式3工作方式 (9)模式4工作方式 (10)模式5工作方式 (11)开关量工作方式 (12)>>模块安装说明 (13)波束角图 (13)位置选择 (14)情况一 (14)情况二 (14)情况三 (15)情况四 (15)情况五 (16)测人范围 (16)>>注意事项 (17)>>产品尺寸 (17)超声波换能器尺寸 (17)控制主板尺寸 (18)板载换能器主板尺寸 (18)>>产品概述AJ-SR04M-T-X超声波测距模块,是采用收发一体的防水带线探头,运用非接触试超声波探测技术设计而成。
产品在20cm 至800cm 范围内,能够准确探测出与平面物体间的距离,并且在20cm 至250cm 范围内,能够准确测人。
基本工作原理:此超声波测距模块连接3-5.5V 电源后,模块本具备5种工作模式。
如有相关要求,可以与本公司联系,我们会为您提供和定做符合您需求的产品模式1:普通脉宽方波 最低功耗2.5mA模式2:低功耗脉宽方波 最低功耗40uA模式3:自动串口 最低功耗2.5mA模式4:串口触发 最低功耗20uA模式5:ASCII码输出 最低功耗20uA>>产品特点1、体积小,使用便捷;2、功耗低, 先择低功耗模式时 <20ua ;3、使用电压宽 3-5.5V工作电压3、测量精度高最高分辩率1mm精度;4、抗干扰强;5、一体化封闭式防水带线探头,适用于潮湿、恶劣的测量场>>产品应用场合1、智能小车测距,避障2、物体距离测量,人体高度测量3、智能交通控制,停车位控制4、教研,安防,工业控制5、人工智能,飞机高度测量等>>技术参数:产品结构图深圳安吉电子深圳安吉电子电气参数>>模块输出格式说明切换模式的方法,在断电的情况下面更换模块上面R19阻值即可变更模式模块启动流程图模式1引脚定义: Trig 触发信号Echo 输出回响信号模式1工作方式:当给Trig一个大于10us高电平触发信号,模块会工作一次相应Echo引脚会输出一次高电平,高电平的时间即为距离物体的距离通过Echo计算距离的公式: uS/58=厘米或者uS/148=英寸;或是:距离=高电平时间*声速(340M/S)/2;模式1模块最低功耗为2.5mA模式2引脚定义: Trig 触发信号Echo 输出回响信号模式2工作方式:当给Trig一个大于1ms高电平触发信号,模块会工作一次相应Echo引脚会输出一次高电平,高电平的时间即为距离物体的距离(注意Trig高电平的时候要大于1ms才能保证正常触发)通过Echo计算距离的公式: uS/58=厘米或者uS/148=英寸;或是:距离=高电平时间*声速(340M/S)/2;模式2模块最低功耗为40uA模式3引脚定义: RX 无任何意义TX 输出回响信号模式3工作方式: 模块每100ms自动输出一帧,含4 个8 位数据.帧格式为:0XFF+H_DATA+L_DATA+SUM 波特率设置 9600,none,8bit,1stop1、0XFF:为一帧开始数据,用于判断.2、H_DATA:距离数据的高8 位.3、L_DATA:距离数据的低8 位.4、SUM: 数据和,用于效验.H_DATA+L_DATA=SUM(仅低8 位).5、H_DATA 与L_DATA 合成16 位数据,即以毫米为单位的距离值.例如:产品应答: FF 07 A1 A7其中校验码SUM=A8=(0x07+0xA1)&0x00ff0x07 为距离的高位数据;0xA1 为距离的低位数据;距离值为0x07A1; 转换成十进制为1953; 单位为: 毫米通过Echo计算距离的公式: uS/58=厘米或者uS/148=英寸;或是:距离=高电平时间*声速(340M/S)/2;模式3模块最低功耗为2.5mA模式4引脚定义: RX 发任何数都会触发一次,或者置一次低电平也会触发一次 TX 输出回响信号模式4工作方式: 向RX引脚发送一次串口数据或者把RX引脚置低一次,模块测距后会输出一帧数据,含4 个8 位数据.帧格式为: 0XFF+H_DATA+L_DATA+SUM ,波特率设置 9600,none,8bit,1stop1、0XFF:为一帧开始数据,用于判断.2、H_DATA:距离数据的高8 位.3、L_DATA:距离数据的低8 位.4、SUM: 数据和,用于效验.H_DATA+L_DATA=SUM(仅低8 位).5、H_DATA 与L_DATA 合成16 位数据,即以毫米为单位的距离值.例如:产品应答: FF 07 A1 A7其中校验码SUM=A8=(0x07+0xA1)&0x00ff0x07 为距离的高位数据;0xA1 为距离的低位数据;距离值为0x07A1; 转换成十进制为1953; 单位为: 毫米通过Echo计算距离的公式: uS/58=厘米或者uS/148=英寸;或是:距离=高电平时间*声速(340M/S)/2;模式4模块最低功耗为20uA模式5引脚定义: RX 发任何数都会触发一次,或者置一次低电平也会触发一次 TX 输出回响信号模式5工作方式: 向RX引脚发送一次串口数据或者把RX引脚置低一次,模块测距后会输出一帧数据,数据用ASCII码显示出来,波特率设置 9600,none,8bit,1stop模式5模块最低功耗为20uA开关量模式引脚定义: Trig 默认高电平为工作,置低电平模块暂停工作Echo 大于设定值输出低电平,小于输出高电平开关量模式工作方式: 模块200ms会自动检测一次,并判断Trig引脚状态高电平模块则工作一次低电平模块则暂工作等待高电平到来,大于设定值Echo输出低电平,小于Echo输出高电平如何设置距离:一: 模块通上电源二: 探头对着物体比如墙面三: 按下”设定开关”大于0.5秒,如果探头离墙面2 米设置的距离就是2 米>>模块安装说明波束角图深圳安吉电子波束角:超声波传感器在发射超声波时沿传感器中轴线的延长线(垂直于传感器表面0°线)方向上的超声射线能量最大。
KS103超声波测距模块说明书

工作电压:3.0V~5.5V 直流电源 工作时瞬间最大电流:10.6mA@5.0V, typical 工作电流:1.6-2.7 mA@5.0V, typical 休眠时最大耗电量:500uA@5.0V, typical (串口模式时不休眠) 功耗:使用纳瓦技术省电,5s 未收到 I2C 控制指令自动进入 uA 级休眠,并可随时被主机 I2C 控
位
I2C
(4)
数据。
Note 4: 这种总线钳制探测方式可以为客户获得更大的探测速度及效率,而不是通过定时器延时或 delay 函数延时每次探测都要至少等
待 65ms。换言之,用户大部分时候仅需要快速知晓 1m 范围内是否有障碍物。具体延时时间应大于表 1 所列各指令的最大探测时间。
如果不希望 SCL 线在探测时被拉低,可以通过发送指令 0xc3 指令,之后断电重启 KS101B/KS103/KS103S 后 SCL 线仍然不会拉低。如果想恢复 I2C 钳制及 SCL 拉低功能,发送
Note 1: 要达到最佳的工作状态推荐使用+5V 电源,低于 5V 的电压将影响测距量程。并且,严禁将 VCC 与 GND 接反,否则可能会
损坏电路。超过 3 秒钟的电路反接将可能导致不可恢复的损坏。
具体连线如下图所示(20 个):
VCC VCC
R1
R2
4.7K
4.7K
VCC SDA SCL GND
I2C 地址
寄存器 2
8 位数据指令
延时等待或查询 SCL
否
线是否为高?
3
是
接收 16 位 I2C 数据
多量程探测 探测指令从 0x01 到 0x2f,数值越大,信号增益越大。指令 0x01 对应量程约 100mm,0x02
JSN-SR04T-2.0 一体化超声波测距模块说明书

JSN-SR04T-2.0一体化超声波测距说明书1、产品特点:JSN-SR0T4-2.0超声波测距模块可提供20cm-600cm的非接触式距离感测功能,测距精度可达高到2mm;模块包括收发一体的超声波传感器与控制电路组成。
模式一的用法与本司的HC-SR04模块谦容。
本产品采用工业级一体化超声波探头设计,防水型,性能稳定,谦容市场上所有的MCU工作。
1、体积小,使用便捷2、供电范围宽,低功耗3、测量精度高,分辨率高4、探测盲区小,距离更远5、输出方式多样化,脉宽输出,串口输出。
2、实物图:3、规格参数:脉宽输出串口输出工作电压DC: 3.0-5.5V工作电流小于8mA探头频率40kHz最远射程600cm最近射程20cm远距精度±1cm分辨率1mm测量角度75度输入触发信号1、10uS以上的TTL脉冲2、串口发送指令0X55输出回响信号输出脉宽电平信号,或TTL接线方式3-5.5V(电源正极) Trig (控制端)RX Echo(输出端)TX GND(电源负极产品尺寸L42*W29*H12 mm工作温度-20℃—+70℃产品颜色PCB板为蓝色4、功能说明:本模块共有三种工作模式可以选择,客户可根据自己实际需要进行切换或实验。
如下图模式一:R27=open 即是不用焊接。
该模式说明如下1、基本工作原理:(1)采用IO口TRIG触发测距,给最少10us的高电平信呈。
(2)模块自动发送8个40khz的方波,自动检测是否有信号返回;(3)有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。
测试距离=(高电平时间*声速(340M/S))/2;(4)模块被触发测距后,如果接收不到回波(原因超过所测范围或是探头没有正对被测物),ECHO口会在60MS后自动变为低电平,标志着此次测量结束,不论成功与否。
(5)LED指示灯说明,LED非电源指示灯,它在模块接收到触发信号后才会亮,此时模块处于工作状态。
超声波测距仪说明书

自动测量及控制综合课程设计说明书题目超声波测距仪学院机械工程学院班级学生姓名学号指导老师2015年1月18日目录1绪论 (3)1.1课题设计及意义 (3)1.2设计内容 (3)2超声波测距设计原理及方案选择 (3)2.1超声波测距原理 (3)2.2设计方案 (4)3硬件选择与设计 (5)3.1单片机的选择 (6)3.2超声波模块的选择 (6)3.2.1 HC-SR04超声波模块时序图 (7)3.2.2 HC-SR04模块的使用 (8)3.3数码管的选择 (8)3.4硬件电路的设计 (9)4软件部分设计 (9)5数据处理及误差分析 (11)6设计体会与总结 (11)附录 (13)附录Ⅰ:超声波测距仪系统实物图................ 错误!未定义书签。
附录Ⅱ:程序代码 (13)附录Ⅲ:参考文献 (15)1绪论1.1课题设计及意义随着科学技术的快速发展,超声波将在测距仪中的应用越来越广。
但就目前水平说,人们可以具体利用的测距技术还十分有限,因此,这是一个正在蓬勃发展而又有无限前景的技术及产业领域。
展望未来,超声波测距仪作为种新型的非常重要的工具在各方面都将有很大的发展空间,它将朝着更加高定位高精度的方向发展,以满足日益发展的社会需求,如声纳的发展趋势基本为:研制具有更高定位精度的被动测距声纳,以满足水中武器实施全隐蔽攻击的需要;继续发展采用低频线谱检测的潜艇拖曳线列阵声纳,实现超远程的被动探测和识别;研制更适合于浅海工作的潜艇声纳,特别是解决浅海水中目标识别问题;降低潜艇噪声,改善潜艇声纳的工作环境。
无庸置疑,未来的超声波测距仪将与自动化智能化接轨,与其他的测距仪集成和融合,形成多测距仪。
随着测距仪的技术进步测距仪将从具有单纯判断功能发展到具有学习功能,最终发展到具有创造力。
在新的世纪里,面貌一新的测距仪将发挥更大的作用。
1.2设计内容超声波测距仪的设计,由单片机控制超声发射装置发射超声波,当超声波遇到障碍物时,发生反射,再由接受装置接受超声波,由单片机计算从发射到接受的时间并计算出障碍到超声波发射器的距离。
超声波测距模块使用说明
超声波测距资料超声波测距模块连线:我们将超声波测距模块用红色,绿色两根导线引出,红色线(超声波测距模块电源脚)接5208K实验仪+5V,绿色线(超声波测距模块接地脚)接5208K实验仪GND.打开5208K实验仪电源, 超声波测距模块初始化显示27.将超声波发射接收头对准障碍物,数码管将显示超声波测距模块与障碍物之间的距离。
超声波测距学习板,可应用于汽车倒车、建筑施工工地以及一些工业现场的位置监控,也可用于如液位、井深、管道长度的测量等场合。
测量时与被测物体无直接接触,能够清晰稳定地显示测量结果。
超声波学习板采用AT89S51单片机晶振为12M,单片机用P1.0口输出超声波换能器所需的40K方波信号,利用外中断监测超声波接收电路输出的返回信号,显示电路采用简单的4位共阳LED数码管,段码驱动用74LS244集成电路,位码用S8550三极管驱动。
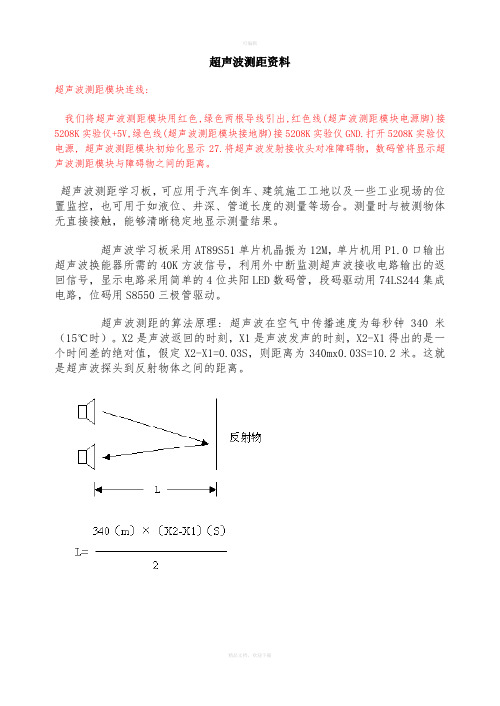
超声波测距的算法原理: 超声波在空气中传播速度为每秒钟340米(15℃时)。
X2是声波返回的时刻,X1是声波发声的时刻,X2-X1得出的是一个时间差的绝对值,假定X2-X1=0.03S,则距离为340mx0.03S=10.2米。
这就是超声波探头到反射物体之间的距离。
产品性能特点:成品板上自带:超声波收发传感器、接收放大电路、四位LED数码显示、四位按键(四个按钮和蜂鸣器属于功能预留,程序中无定义),电源部分自带整流、滤波、稳压电路,允许交流7~15V或者直流9~16V输入,经过实际测试,测量范围可达27~250厘米,测量精度为1厘米。
下图是超声波测距学习板的元件布局图,以下是部分汇编源程序;/////////////////////////////////////////////////////// ; USE BY :超声波测距器; IC :AT89C51; TEL :; OSCCAL :XT (12M); display :共阳LED显示;/////////////////////////////////////////////////////// ;测距范围7CM-11M,堆栈在4FH以上,20H用于标志;显示缓冲单元在40H-43H,使用内存44H、45H、46H用于计算距离;VOUT EQU P1.0 ; 红外脉冲输出端口speak equ p1.1;********************************************;* 中断入口程序 *;********************************************;ORG 0000HLJMP STARTORG 0003HLJMP PINT0ORG 000BHretiORG 0013HRETIORG 001BHLJMP INTT1ORG 0023HRETIORG 002BHRETI;;********************************************;* 主程序 *;********************************************;START: MOV SP,#4FHMOV R0,#40H ;40H-43H为显示数据存放单元(40H为最高位)MOV R7,#0BHCLEARDISP: MOV @R0,#00HDJNZ R7,CLEARDISPMOV 20H,#00HMOV TMOD,#11H ;T1为 T0为16位定时器MOV TH0,#00H ;65毫秒初值MOV TL0,#00HMOV TH1,#00HMOV TL1,#00HMOV P0,#0FFHMOV P1,#0FFHMOV P2,#0FFHMOV P3,#0FFHMOV R4,#04H ;超声波肪冲个数控制(为赋值的一半)SETB PX0SETB ET1SETB EASETB TR1 ;开启测距定时器start1: LCALL DISPLAYJNB 00H,START1 ;收到反射信号时标志位为1CLR EALCALL WORK ;计算距离子程序clr EAMOV R2,#32h;#64H ;测量间隔控制(约4*100=400MS)LOOP: LCALL DISPLAYDJNZ R2,LOOPCLR 00Hsetb et0mov th0,00hmov tl0,00hSETB TR1 ;重新开启测距定时器SETB EASJMP Start1;;**************************************************** ;* 中断程序* *;****************************************************;T1中断,发超声波用 ;T1中断,65毫秒中断一次INTT1: CLR EAclr ex0MOV TH0,#00HMOV TL0,#00HMOV TH1,#00HMOV TL1,#00HSETB ET0SETB EASETB TR0 ;启动计数器T0,用以计intt11:CPL VOUT ;40KHZnopnopnopnopnopnopnopnopnopDJNZ R4,intt11;超声波发送完毕,MOV R4,#04Hlcall delay_250 ;延时,避开发射的直达声波信号SETB EX0 ;开启接收回波中断RETIOUT: RETI;外中断0,收到回波时进入PINT0: nopjb p3.2,pint0_exitCLR TR0 ;关计数器CLR EA ;CLR EX0 ;MOV 44H,TL0 ;将计数值移入处理单元MOV 45H,TH0 ;mov th0,#00hmov tl0,#00hjnb p3.2,$SETB 00H ;接收成功标志pint0_exit:RETI;;****************************************************;* 显示程序 *;****************************************************; 40H为最高位,43H为最低位,先扫描高位DISPLAY: MOV R1,#40H;GMOV R5,#7fH;GPLAY: MOV A,R5MOV P0,#0FFHMOV P2,AMOV A,@R1MOV DPTR,#TABMOVC A,@A+DPTRMOV P0,ALCALL DL1MSINC R1MOV A,R5JNB ACC.4,ENDOUT;GRR AMOV R5,AAJMP PLAYENDOUT: MOV P2,#0FFHMOV P0,#0FFHRET;TAB: DB 18h, 7Bh, 2Ch, 29h, 4Bh, 89h, 88h, 3Bh, 08h, 09h,0ffh ;共阳段码表 "0" "1" "2" "3" "4" "5""6" "7" "8" "9" "不亮""A""-" ;;**************************************************** ;* 延时程序 *;**************************************************** ;DL1MS:push 06hpush 07hMOV R6,#14HDL1: MOV R7,#19HDL2: DJNZ R7,DL2DJNZ R6,DL1pop 07hpop 06hRET;;**************************************************** ;* 距离计算程序 (=计数值*17/1000cm) *;**************************************************** ;work: PUSH ACCPUSH PSWPUSH BMOV PSW, #18hMOV R3, 45HMOV R2, 44HMOV R1, #00DMOV R0, #17DLCALL MUL2BY2MOV R3, #03HMOV R2, #0E8HLCALL DIV4BY2LCALL DIV4BY2MOV 40H, R4MOV A,40HJNZ JJ0MOV 40H,#0AH ;最高位为零,不点亮JJ0: MOV A, R0MOV R4, AMOV A, R1MOV R5, AMOV R3, #00DMOV R2, #100DLCALL DIV4BY2MOV 41H, R4MOV A,41HJNZ JJ1MOV A,40H ;次高位为0,先看最高位是否为不亮SUBB A,#0AHJNZ JJ1MOV 41H,#0AH ;最高位不亮,次高位也不亮JJ1: MOV A, R0MOV R4, AMOV A, R1MOV R5, AMOV R3, #00DMOV R2, #10DLCALL DIV4BY2MOV 42H, R4MOV A,42HJNZ JJ2MOV A,41H ;次次高位为0,先看次高位是否为不亮SUBB A,#0AHJNZ JJ2MOV 42H,#0AH ;次高位不亮,次次高位也不亮JJ2: MOV 43H, R0POP BPOP PSWPOP ACCRET;;**************************************************** ;* 两字节无符号数乘法程序 *;**************************************************** ; R7R6R5R4 <= R3R2 * R1R0超声波专用发射接收头,有T字样的是发射头,标有R字样的是接收头.。
US100使用说明
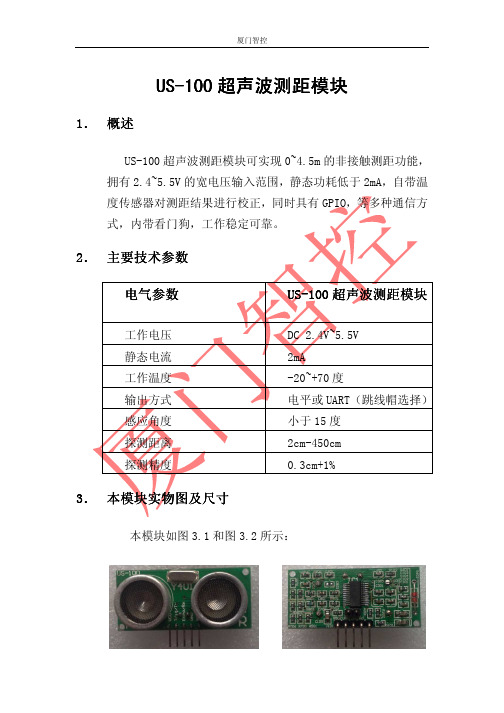
厦门智控USUS-100 超声波测距模块1. 概述US-100 超声波测距模块可实现 0~4.5m 的非接触测距功能, 拥有 2.4~5.5V 的宽电压输入范围,静态功耗低于 2mA,自带温 度传感器对测距结果进行校正,同时具有 GPIO,等多种通信方 式,内带看门狗,工作稳定可靠。
2. 主要技术参数 电气参数工作电压 静态电流 工作温度 输出方式 感应角度 探测距离 探测精度USUS-100 超声波测距模块DC 2.4V~5.5V 2mA -20~+70 度 电平或 UART(跳线帽选择) 小于 15 度 2cm-450cm 0.3cm+1%本模块实物图及 实物图及尺寸 3. 本模块实物图及尺寸本模块如图 3.1 和图 3.2 所示:厦门智控图 3.1: US-100 正面图图 3.2:US-100 背面图本模块的尺寸:45mm*20mm*1.6mm。
板上有两个半径为 1mm 的机械孔,如图 3.3 所示:图 3.3:US-100 尺寸图4. 接口说明5 Pin 接口为 2.54mm 间距的弯排针,如图 4.1 所示:厦门智控图 4.2:5 Pin 接口 从左到右依次编号 1,2,3,4,5。
它们的定义如下: 1 号 Pin:接 VCC 电源(供电范围 2.4V~5.5V)。
2 号 Pin:接外部电路的 Trig 端。
3 号 Pin:接外部电路的 Echo 端。
4 号 Pin:接外部电路的地。
5 号 Pin:接外部电路的地。
电平触发测距 测距工作原理 5. 电平触发测距工作原理电平触发测距的时序如图 5.1 所示:10US8 40K图 5.1:US-100 测距时序图厦门智控图 5.1 表明:只需要在 Trig 管脚输入一个 10US 以上的高 电平,系统便可发出 8 个 40KHZ 的超声波脉冲,然后检测回波 信号。
当检测到回波信号后,模块还要进行温度值的测量,然 后根据当前温度对测距结果进行校正,将校正后的结果通过 Echo 管脚输出。
杭州联测 U-DCSDS-LCCN2 超声波测距传感器 使用说明书
2、0~5V: 蓝线: V +
黄线: V–
3、485/232 通讯: 黄线:T/R+ 蓝线: T/R–
4、继电器信号: 蓝线
黄线
4
6.信号说明
5、NPN 信号: 蓝线: NPN+ 黄线:NPN 6、PNP 信号: 蓝线: PNP+ 黄线: PNP备注:1、输出信号选择(1~6)其中一种;
2、要将黑线可靠接地; 3、当测距传感器为 mA 模块时,也可将黄线(mA-)接地;
产品包装内容
序号
物品名称
数量
备注
1
超声波测距传感器
1
2
说明书
1
3
合格证
1
II
目录
1. 产品简介.......................................................................................................1 2. 超声波测距原理...........................................................................................1 3. 产品特点.......................................................................................................1 4. 主要技术指标...............................................................................................2 5. 安装指南.......................................................................................................2
超声波模块使用说明书
超声波模块使用说明书尊敬的客户:您好!感谢您选用本店的超声波测距模块,为了更快更好的使用本产品,请您仔细的阅读本使用说明书。
一、超声波测距模块简介检测距离:5CM-5M分辨率:5MM数字电平信号,可直接接单片机,无需任何辅助电路,也无需单片机产生任何信号辅助,距离和模块输出信号脉冲长度成正比。
尺寸:43.5*20.5毫米高度:13.8毫米二、超声波测距模块的引脚功能如上图所示:从左到右依次为VCC、控制发射、接收信号(距离信号由此输出)、空脚、GND。
(以上是正确顺序,模块上所标的不对,特此更正)三、测距方式:通过单片机i/o口向模块控制信号接口发送一个>=10US的高电平信号(启动测距功能),等待然后是检测输出信号,输出信号的高电平时间与距离成正比。
然后根据高电平的时间便可计算出距离。
示例程序:///////////////////////////////////////////////////////////////////// ///////////////PIC16F877+DYP-ME007+LCD03example//Written October2005by Gerald Coe,using HITECH PIC16compiler////Note-assumes a20MHz crystal,which is5MHz timer clock//A1:4prescaler is used to give a 1.25MHz timer count(0.8uS per tick)////This code is Freeware-Use it for any purpose you like./////////////////////////////////////////////////////////////////////// //////////#include<pic.h>#include<stdio.h>__CONFIG(0x3b32);#define trig RB0#define echo RB1void clrscn(void);//prototypesvoid cursor(char pos);void print(char*p);void setup(void);unsigned int get_srf04(void);char s[21];//buffer used to hold text to printvoid main(void){unsigned int range;setup();//sets up thePIC16F877I2C portclrscn();//clears the LCD03disply cursor(2);//sets cursor to1st row of LCD03sprintf(s,"SRF04Ranger Test");//text,printed into our bufferprint(s);//send it to the LCD03while(1){//loop foreverrange=get_srf04();//get range from srf04 (round trip flight time in0.8uS units)cursor(24);//sets cursor to2nd row of LCD03sprintf(s,"Range=%dcm",range/72);//convert to cmprint(s);//send it to the LCD03cursor(44);//sets cursor to3rd row of LCD03sprintf(s,"Range=%dinch",range/185);//convert to inchesprint(s);//send it to the LCD03TMR1H=0;//52mS delay-this is so that the SRF04ranging is not too rapidTMR1L=0;//and the previous pulse has faded away before we start the next oneT1CON=0x21;//1:4prescale and runningTMR1IF=0;while(!TMR1IF);//wait for delay timeTMR1ON=0;//stop timer }}unsigned int get_srf04(void){TMR1H=0xff;//prepare timer for10uS pulse TMR1L=-14;T1CON=0x21;//1:4prescale and runningTMR1IF=0;trig=1;//start trigger pulsewhile(!TMR1IF);//wait10uStrig=0;//end trigger pulseTMR1ON=0;//stop timerTMR1H=0;//prepare timer to measure echo pulseTMR1L=0;T1CON=0x20;//1:4prescale but not running yetTMR1IF=0;while(!echo&&!TMR1IF);//wait for echo pulse to start(go high)TMR1ON=1;//start timer to measure pulsewhile(echo&&!TMR1IF);//wait for echo pulse to stop(go low)TMR1ON=0;//stop timerreturn(TMR1H<<8)+TMR1L;//TMR1H:TMR1L contains flight timeof the pulse in0.8uS units}void clrscn(void){SEN=1;//send start bitwhile(SEN);//and wait for it to clearSSPIF=0;SSPBUF=0xc6;//LCD02I2C addresswhile(!SSPIF);//wait for interruptSSPIF=0;//then clear it.SSPBUF=0;//address of register towrite towhile(!SSPIF);//SSPIF=0;//SSPBUF=12;//clear screenwhile(!SSPIF);//SSPIF=0;//SSPBUF=4;//cursor offwhile(!SSPIF);//SSPIF=0;//PEN=1;//send stop bitwhile(PEN);//}void cursor(char pos){SEN=1;//send start bitwhile(SEN);//and wait for it to clearSSPIF=0;SSPBUF=0xc6;//LCD02I2C addresswhile(!SSPIF);//wait for interruptSSPIF=0;//then clear it.SSPBUF=0;//address of register to write towhile(!SSPIF);//SSPIF=0;//SSPBUF=2;//set cursorwhile(!SSPIF);//SSPIF=0;//SSPBUF=pos;//while(!SSPIF);//SSPIF=0;//PEN=1;//send stop bitwhile(PEN);//}void print(char*p){SEN=1;//send start bitwhile(SEN);//and wait for it to clearSSPIF=0;SSPBUF=0xc6;//LCD02I2C addresswhile(!SSPIF);//wait for interruptSSPIF=0;//then clear it.SSPBUF=0;//address of register to write to while(!SSPIF);//SSPIF=0;//while(*p){SSPBUF=*p++;//write the datawhile(!SSPIF);//SSPIF=0;//}PEN=1;//send stop bitwhile(PEN);//}void setup(void){unsigned long x;TRISB=0xfe;//RB0(trig)is outputPORTB=0xfe;//and starts lowTRISC=0xff;PORTC=0xff;SSPSTAT=0x80;SSPCON=0x38;SSPCON2=0x00;SSPADD=50;//SCL=91khz with20Mhz Oscfor(x=0;x<300000L;x++);//wait for LCD03to initialise}注:只是提供一个编程思路,可能还需要自己动手编程,没有其他程序了。
URM05 超声波测距模块
URM05 用户手册
2
URM05
A. 注意!在没有认真阅读本说明之前,请勿给模块加电!错误接线将导致模块永久性损坏或烧毁微控制器。 B. 注意!请认真查看引脚功能说明,正确接线!请勿将电源反接,否则将导致模块永久性损坏。 C. 注意!本产品使用电源电压为直流 6V-24V,请勿使用超出额定电压的电源!保证电源的稳定,如果出现高压脉
uint8 i; uint32 Time;
clr_BIHN; clr_BLNK; set_INIT;
TCNT1 = 0; //清计数器 if((TIFR & _BV(TOV1))) TIFR |= _BV(TOV1); //通过置清计数器溢出标志
i = 9; while(i--) set_BIHN;
冲,可能会导致微控制器永久性损坏。 D. 注意!本产品无防水防潮功能,请在干燥环境下保存或使用!不可将重物堆积在上面。
URM05 超声波测距传感器
URM05 用户手册
3
概述
URM05 是基于 senscomp 公司 6500 超声波静电换能器设计的一款大功率超声波。测量距离可达 10 米, 另外一个显著的特点是超声波探测夹角只有 15°,而大多数的超声波是 60°。这样就可以提高超声 波测量角度分辨率。是机器人等应用领域壁障导航方案的首选。
urm05用户手册urm05超声波测距传感器机器人壁障导航测距仪器urm05用户手册urm05超声波测距传感器工程测量工业控制urm05用户手册urm05超声波测距传感器下面为avr单片机测距程序参考
URM05 用户手册
1
URM05 Users Manual
URM05 Users Manual
URM05 超声波测距传感器
超声波测距.

测控二班张国强单鹏安齐崇超声波测距的设计摘要随着科学技术的快速发展,超声波将在测距仪中的应用越来越广。
但就目前技术水平来说,人们可以具体利用的测距技术还十分有限,因此,这是一个正在蓬勃发展而又有无限前景的技术及产业领域。
展望未来,超声波测距仪作为一种新型的非常重要有用的工具在各方面都将有很大的发展空间,它将朝着更加高定位高精度的方向发展,以满足日益发展的社会需求,如声纳的发展趋势基本为:研制具有更高定位精度的被动测距声纳,以满足水中武器实施全隐蔽攻击的需要;继续发展采用低频线谱检测的潜艇拖曳线列阵声纳,实现超远程的被动探测和识别;研制更适合于浅海工作的潜艇声纳,特别是解决浅海水中目标识别问题;大力降低潜艇自噪声,改善潜艇声纳的工作环境。
无庸置疑,未来的超声波测距仪将与自动化智能化接轨,与其他的测距仪集成和融合,形成多测距仪。
随着测距仪的技术进步,测距仪将从具有单纯判断功能发展到具有学习功能,最终发展到具有创造力。
在新的世纪里,面貌一新的测距仪将发挥更大的作用。
本设计采用以AT89C51单片机为核心的低成本、高精度、微型化数字显示超声波测距仪的硬件电路和软件设计方法。
整个电路采用模块化设计,由主程序、中断程序、发射子程序、接收子程序、显示子程序等模块组成。
各探头的信号经单片机综合分析处理,实现超声波测距仪的各种功能。
在此基础上设计了系统的总体方案,最后通过硬件和软件实现了各个功能模块。
1.总体方案设计介绍本文所研究的超声波测距仪利用超声波指向性强、能量消耗缓慢、传播距离较远等优点,即用超声波发射器向某一方向发送超声波,同时在发射的时候开始计时,在超声波遇到障碍物的时候反射回来,超声波接收器在接收到反射回来的超声波时,停止计时。
设超声波在空气中的传播速度为V,在空气中的传播时间为T,汽车与障碍物的距离为S,错误!未指定书签。
S=VT/2,这样可以测出汽车与障碍物之间的距离,然后在LED显示屏上显示出来。
UR-V10超声波测距说明书

超声波测距模块UR-V10图1.1 实物图(正面) 图1.2 实物图(背面)1、UR-V10概况1.1、产品特点●非接触性:利用超声波往返时间,换算出距离(有温度补偿);●量程大:量程最大可达6米;●温度补偿:距离换算和测距角度都有温度补偿;●供电简单:与MCU 共用DC5V±5%电源;●低功耗:休眠状态几乎不耗电;●控制简单:运行和休眠由Ctr端口电平控制;●数字输出:距离和温度以数字输出;●其它:可靠性高,使用工业级MCU,内置看门狗;1.2、功能参数测距参数测温参数电气参数量程 5.00米(至少) 量程-20℃~55℃工作电压DC5V±5% 分辨率1cm 分辨率1℃工作电流﹤12mA误差±1.5cm或±0.5% 误差±1℃休眠电流﹤10uA角度﹤±15°工作温度-20℃~55℃﹤ 6cm(强反射时,发射功率小)外形尺寸45mm * 20mm 盲区﹤20cm(弱反射时,发射功率大)2、接线端口如图1.1和图1.2所示;可焊接2.54mm插针或端子(XH-4A或XH-4AW)。
2.1、端口定义名称用途描述Vcc 电源端电源正极Ctr 控制端Ctr = 1 = 模块进入休眠状态(几乎不耗电) Ctr = 0 = 模块进入测距状态(耗电<12mA)Out 数据端输出CMOS电平的Uart格式信号Gnd 电源端电源负极2.2、Ctr 端口Ctr 端口的电路结构如图2.2所示。
2.3、Out 端口Out 端口的电路结构如图2.3所示。
图2.2 Ctr 端口示意图 图2.3 Out 端口示意图3、工作原理和流程3.1、①外部将Ctr 拉低,模块被唤醒,并在18±30%毫秒后进入测距状态;②对气温进行5次测量,并取平均值作为温度测量结果T ,并由此求得声速T V ;③对障碍物进行5~11次超声波收发动作(如收不到反射信号,发射功率将增加,此时盲区将增大),并取平均值作为超声波往返计时结果;④模块到障碍物的距离由模块自带的MCU 算出t V S T21=⑤将测距和测温结果通过Out 送出;⑥数据发送完毕后检测Ctr ,若为低电平则继续测量,否则进入休眠状态;注意:①测量过程中不能改变Ctr 电平,否则将测量结果准确度将受到影响,甚至测量失败; ②从Ctr 变低到第1次测量结果输出,耗时大约0.5秒~1.2秒; ③上电0.1秒后UR-V10直接进入休眠状态。
超声波模块使用方法

超声波模块使用方法Ultrasonic modules are widely used in various fields such as distance measurement, object detection, and obstacle avoidance. These modules emit high-frequency sound waves and measure the time it takes for the waves to bounce back to calculate the distance to an object. When using an ultrasonic module, it is important to carefully follow the instructions to ensure accurate and reliable results.超声波模块是在距离测量、物体检测和障碍物避免等各个领域广泛使用的。
这些模块发射高频声波,并测量声波反弹回来所需的时间,以计算到物体的距离。
在使用超声波模块时,重要的是要仔细遵循说明书,以确保准确可靠的结果。
Firstly, it is crucial to understand the wiring and connections of the ultrasonic module. Most ultrasonic modules have four pins - VCC, Trig, Echo, and GND. VCC is the power supply pin, Trig is used to trigger the module to send out ultrasonic waves, Echo receives the ultrasonic waves reflected back from an object, and GND is the ground pin. Ensuring the correct connections are made is essential for the proper functioning of the ultrasonic module.首先,重要的是要了解超声波模块的接线和连接。
超声波测距说明

超声波测距
1.功能描述
基于单片机控制的超声波自动测距系统。
利用超声波传输距离与时间的关系,采用单片机进行控制及数据处理,能精确测量两点间距离的超声波测距系统。
2.产品模块配置
1)EDM001-MCS51单片机主机
2)EDM111-超声波发射接收模块
3)EDM605-四位数码管显示模块
4)EDM314±5V, ±12V直流电源模块
5)EDM315 变压器
3.单元模块电路及功能
4.产品模块连线
1)各模块都连接电源5V,GND.
2)EDM001-MCS51单片机主机与EDM111-超声波发射接收模块接
线部分: P3.0接transmit, P3.2接receive
3)EDM001-MCS51单片机主机与EDM605-四位数码管显示模块接
线部分:P0.0~P0.7接A~Dp, P2.1~P2.4接DS1~DS4
5.产品电路总图
6.实验步骤及调试
1)用示波器测试EDM111-超声波发射接收模块transmit是否为
40kHZ的方波
2)用手或是书本遮挡在超声波探头前方,然后用示波器测试
EDM111-超声波发射接收模块receive端是否有很明显的脉冲形成,如果有,说明超声波接收探头有接收到超声波信号。
3)整体调试:测量范围20cm~180cm,如果测量距离不足100cm,查看
超声波收发探头是否紧贴线路板,焊接时探头应与线路板有一定的间隙。
7. 测试点参数
V=4v
40kHZ
0.2ms-----2ms
V=4v。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录
1 系统简介 ........................................................................................................................................................ 1 1.1 基本特性与参数指标 ............................................................................................................................. 1 1.2 主要功能 ................................................................................................................................................. 1 1.3 结构示意图 ............................................................................................................................................. 1 1.4 系统环境 ................................................................................................................................................. 1 1.5 注意事项 ................................................................................................................................................. 2 1.5.1 电源输入 ....................................................................................................................... 2 1.5.2 测距模式选择 ............................................................................................................... 2 1.5.3 使用方式 ....................................................................................................................... 3
4 应用举例 ...................................................................................................................................................... 14 4.1 配合 61 板进行短距测距应用 ............................................................................................................. 14 4.1.1 模组跳线设置 ............................................................................................................. 14 4.1.2 61 板设置与接线 ........................................................................................................ 14 4.1.3 下载 Demo 程序并进行短距测距.............................................................................. 15 4.1.4 短距测距注意事项及声明 ......................................................................................... 15 4.2 配合 61 板进行中距测距应用 ............................................................................................................. 15 4.2.1 模组跳线设置 ............................................................................................................. 15 4.2.2 61 板设置与接线 ........................................................................................................ 15
3 软件说明 ........................................................................................................................................................ 6 3.1 超声波测距原理 ..................................................................................................................................... 6 3.2 软件构成 ................................................................................................................................................. 7 3.2.1 主程序 ........................................................................................................................... 7 3.2.2 超声波测距程序 ........................................................................................................... 8 3.2.3 EXT1 外部中断程序................................................................................................... 12 3.3 超声波测距函数介绍 ........................................................................................................................... 12 3.4 超声波测距程序注意事项 ................................................................................................................... 13
版权声明
凌阳科技股份有限公司保留对此文件修改之权利且不另行通知。凌阳科技股份有限公司 所提供之信息相信为正确且可靠之信息, 但并不保证本文件中绝无错误。请于向凌阳科技股 份有限公司提出订单前, 自行确定所使用之相关技术文件及规格为最新之版本。若因贵公司 使用本公司之文件或产品, 而涉及第三人之专利或著作权等智能财产权之应用及配合时, 则 应由贵公司负责取得同意及授权, 本公司仅单纯贩售产品, 上述关于同意及授权, 非属本公 司应为保证之责任. 又未经凌阳科技股份有限公司之正式书面许可, 本公司之所有产品不得 使用于医疗器材, 维持生命系统及飞航等相关设备。
2 硬件模块说明 ................................................................................................................................................ 4 2.1 电路原理图简介 ..................................................................................................................................... 4 2.1.1 超声波谐振频率调理电路 ........................................................................................... 4 2.1.2 超声波回波接收处理电路 ........................................................................................... 4 2.1.3 电源接口 ....................................................................................................................... 5 2.1.4 测距模式选择跳线 ....................................................................................................... 5 2.1.5 模组接口 ....................................................................................................................... 5 2.2 主要元器件 ................................................................................................ 5