风力发电机组的运行特性
风电出力特性研究及其应用
风电出力特性研究及其应用风电是一种清洁能源,具有广阔的发展前景和重要的应用价值。
风电出力特性是指风力发电机组在不同风速下的发电功率变化特性。
了解和研究风电出力特性对于风力发电行业的发展和风电资源的合理利用具有重要的意义。
本文将针对风电出力特性的研究及其应用进行探讨。
一、风电出力特性研究1. 风电机组的工作原理风电机组是通过风力带动叶片旋转,通过传动系统带动发电机发电。
其出力特性受到多种因素的影响,包括风速、叶片设计、发电机性能、控制系统等。
在不同的风速下,风电机组的出力特性有着明显的变化。
2. 风速对风电出力的影响风速是风力发电的关键因素,不同的风速将导致不同的出力特性。
一般而言,当风速较小时,风电机组的出力较低;当风速达到额定风速时,风电机组的出力将达到最大值;当风速过大时,发电机组需要通过控制系统来调整叶片的转速,以避免因风速过大而导致损坏。
3. 风电出力特性的建模与分析为了更好地了解风电机组的出力特性,研究人员通常会对其进行建模与分析。
通过建立数学模型,模拟不同风速下的发电功率输出,并对其进行分析,可以帮助我们更好地了解风电机组在不同工况下的性能表现,为风电场的规划和设计提供参考依据。
1. 风电场的选址和规划了解风电机组的出力特性对于风电场的选址和规划具有重要意义。
在选址时需要考虑当地的风资源情况,并结合风电机组的出力特性来确定最佳的风电场布局。
通过对风速和出力特性的分析,可以帮助规划者选择最佳的风电机组型号和布置方案,最大限度地发挥风电资源的利用效率。
2. 风电场的运行优化在风电场运行阶段,理解风电机组的出力特性有助于优化风电场的运行策略。
通过实时监测风速和出力特性,可以调整风电机组的工作状态,以提高风电场的发电效率和经济性。
也可以通过对出力特性的分析来制定风电机组的维护计划,延长设备的使用寿命,降低运行成本。
3. 新能源智能电网的建设随着新能源的不断发展和普及,风电出力特性的研究也对智能电网的建设具有重要意义。
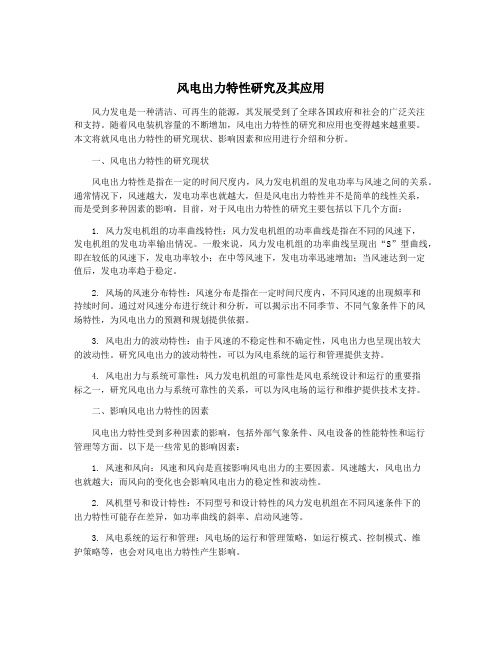
风力发电机分类及特点分析

齿轮箱
DFIG
电网
转子侧 变换器
网侧 变换器
双馈式变速恒频风力发电系统结构框图
电气工程与自动化学院
第三章 风力发电
3)运动部件少,由磨损等引起的 故障率很低,可靠性高。
4)采用全功率逆变器联网,并网、 解列方便。
5)采用全功率逆变器输出功率完 全可控,如果是永磁发电机则 可独立于电网运行。
缺点是: 由于直驱型风力发电机组 没有齿轮箱,低速风轮直接 与发电机相连接,各种有害 冲击载荷也全部由发电机系 统承受,对发电机要求很高。 同时,为了提高发电效率, 发电机的极数非常大,通常 在100极左右,发电机的结构 变得非常复杂,体积庞大, 需要进行整机吊装维护。
风力发电机分类及特点
李少龙
第三章 风力发电
课件
2020/3/3
了解风力发电机的分类 双馈式和直驱式风力发电机介绍
电气工程与自动化学院
第三章
课件
按照风轮形式分类
风力发电
2020/3/3
(1)垂直轴风力发电机组
垂直轴风轮按形成转矩的机理分为阻力型和升力型。 阻力型的气动力效率远小于升力型,故当今大型并网型垂 直轴风力机的风轮全部为升力型。
直驱式风力发电系统大多都使用永磁同步发电机发电,无需励磁 控制,电机运行速度范围宽、电机功率密度高、体积小。随着永磁 材料价格的持续下降、永磁材料性能的提高以及新的永磁材料的出 现,在大、中、小功率、高可靠性、宽变速范围的发电系统中应用 的越来越广泛。
双馈风力发电机的基本运行原理和特点
双馈风力发电机的基本运行原理和特点双馈风力发电机的基本运行原理和特点摘要:双馈风力发电机由于其的优点,己成为并网型风力发电机的主流机型之一。
本文对双馈感应风力发电机的基本运行原理和特点进行了简单的阐释。
关键词:双馈风力发电机运行原理运行特点正文:一、什么是双馈风力发电风力发电简单说就是把风的动能转变成机械能,再把机械能转化为电能。
目前在风力发电领域,双馈电机的应用逐渐占有重要地位。
双馈发电的意思就是指感应电机的定子,转子可以同时发出电能,双馈发电机其转子和定子都最终连于电网,转子与定子都参与励磁;此外,其定子,转子都可以与电网有能量交换二、双馈异步风力发电机的原理双馈异步风力发电机就是通过叶轮将风能转变为机械转矩(即风轮转动惯量),通过主轴传动链,经过齿轮箱增速到异步发电机的转速后,通过励磁变流器励磁而将发电机的定子电能并入电网。
如果超过发电机同步转速,转子也处于发电状态,通过变流器向电网馈电。
双馈发电机正是由叶片通过齿轮箱变速,带动电机高速旋转,同时转子接变频器,通过变频器控制以达到定子侧输出相对完美正弦波,同时在额定转速下,转子侧也能同时发出电流,以达到最大利用风能效果。
双馈异步发电机原理图如下:三、双馈发电机的特点1、由于定子直接与电网连接,转子采用变频器供电,因此,系统中的变频器容量仅取决于发电机运行时的最大转差功率,一般发电机的最大转差率为25%--35%,因而变频器的最大容量仅为发电机额定容量的1/4--1/3。
这样,系统的总体配置费用就比较低。
2、具有变速恒频的特性。
3、可以实现有功功率和无功功率的调节。
四、如何实现变速恒频?设双馈电机的定转子绕组均为对称绕组,电机的极对数为p ,根据旋转磁场理论,当定子对称三相绕组施以对称三相电压,有对称三相电流流过时,会在电机的气隙中形成一个旋转的磁场,这个旋转磁场的转速n1称为同步转速,它与电网频率f1及电机的极对数p的关系如下:n1 =60 f1 /p同样在转子三相对称绕组上通入频率为f2的三相对称电流,所产生的旋转磁场相对于转子本身的旋转速度为:n2= 60f2/p,改变频率f2,即可改变n2,而且若改变通入转子三相电流的相序,还可以改变此转子旋转磁场的转向。
第三章风力发电机组的特性分析

第三章风力发电机组的特性分析风力发电机组是利用风能转化为电能的装置,最主要的组成部分是风力发电机和控制系统。
在设计和运行过程中,需要对风力发电机组的特性进行分析,以了解其工作性能和电能输出能力。
本文将从风力发电机的功率特性、风速-功率曲线、风机性能系数、传动系统效率等几个方面进行分析。
首先,风力发电机组的功率特性是指在不同风速条件下,风力发电机的输出功率变化情况。
通常情况下,风速越高,发电机的输出功率越大。
然而,随着风速的增加,风力发电机的输出功率不会无限制地增加,而是会达到一个峰值后逐渐趋于稳定。
这是因为风力发电机在低风速下,转子转速较低导致输出功率较小;而在高风速下,由于受到空气动力学效应的限制,风力发电机无法进一步提高转速,从而限制了功率的增加。
其次,风速-功率曲线是描述风力发电机在不同风速下的输出功率变化情况的曲线。
通过绘制风速-功率曲线,可以直观地了解风力发电机在不同风速条件下的输出特性。
在曲线的初期阶段,发电机的输出功率随着风速的增加呈现较快的增长趋势;随着风速的继续增加,发电机的输出功率增长逐渐减缓,并在其中一点达到峰值;当风速继续增加时,发电机的输出功率趋于稳定。
第三,风机性能系数是评价风力发电机组性能的重要指标之一、风机性能系数定义为风力发电机的实际输出功率与理论最大输出功率之比,它能够反映风力发电机的利用效率。
风机性能系数通常介于0.2和0.6之间,数值越大表示风力发电机利用风能的效率越高。
最后,传动系统效率是指风力发电机组传动系统能量传递的效率。
传动系统由风轮、转子轴、传动装置等组成,承担将风能转化为电能的任务。
传动系统效率的高低对整个风力发电机组的能量转换效率有着重要影响。
提高传动系统效率可以降低能量损耗,提升风力发电机组的电能输出能力。
在实际应用中,风力发电机组的特性分析是优化设计和管理运维的关键步骤。
通过对风力发电机组的特性进行深入分析,可以帮助工程师了解风力发电机组的工作原理和限制条件,从而提高发电效果、降低成本并保障安全运行。
风力发电机结构和原理

风力发电机结构原理杜容熠太阳辐射到地球的热能中有约2%被转变成风能,全球大气中总的风能量约为1014MW(10亿亿千瓦)。
其中可被开发利用的风能理论值约有3.5×109MW(3.5万亿千瓦),比世界上可利用的水能大10倍。
把风能转变为电能是风能利用中最基本的一种方式。
风力发电机一般有叶轮、发电机(包括装置)、调向器(尾翼)、塔架、限速安全机构和储能装置等构件组成。
风力发电机的工作原理比较简单,叶轮在风力的作用下旋转,它把风的动能转变为叶轮轴的机械能,发电机在叶轮轴的带动下旋转发电。
1.风力发电原理:1.1 风能的概念:风能:空气因为太阳能辐射,造成压力差,而发生运动的动能称为“风能”,风能的计算公式为:E=0.5ρsV³式中: E-风能(W)ρ-空气密度(kg/m3)S-气流截面积(m2)V-风速(m/s)风能密度(W):单位时间内通过单位面积的风能,W=0.5ρV³。
有效风能密度:指风机可利用的风速范围内的风能密度(对应的风速范围大约是3~25m/s)。
1.2 风能发电的动力学原理风力发电采用空气动力学原理,并非风推动叶轮叶片,而是风吹过叶片形成叶片正反面的压力差,这种压力差会产升力,令叶轮旋转并不断横切风流。
该原理类似于飞机上升时的原理,空气通过机翼,产生向上的升力和向前的阻力。
如果将一块薄板放在气流中,则在沿气流方向将产生一正面阻力F D和一垂直于气流方向的升力F L其值分别由下式确定L:F D=0.5CdρSV2F L=0.5C LρSV2式中:CD-阻力系数C-升力系数L S-薄板的面积ρ-空气的密度阻力型叶轮V -气流速度如果把薄片当作叶片,将其装在轮毂上组成叶轮,那么风的作用力旋转中心线就会使叶轮转动。
由作用于叶片上的阻力FD而使其转动的叶轮,称为阻力型叶轮;而由升力FL而使其转动的叶轮,称为升力型叶轮。
目前为止现代风力机绝大多数采用升力型叶轮。
2.风力发电机的组成部分及特点:2.1 叶轮叶轮是将风能转化为动能的机构,风力带动风车叶片旋转,再通过齿轮箱将旋转的速度提升,来促使发电机发电。
风电场风电机组优化有功功率控制的研究

风电场风电机组优化有功功率控制的研究2017年度申报专业技术职务任职资格评审答辩论文题目:风电场风电机组优化有功功率控制的研究作者姓名:李亮单位:中核汇能有限公司申报职称:高级工程师专业:电气二Ο一七年六月十二日摘要随着风电装机容量的与日俱增,实现大规模的风电并网是风电发展的必然趋势。
然而,由于风能是一种波动性、随机性和间歇性极强的清洁能源,导致风电并网调度异于常规能源。
基于此,本文将针对风电场层的有功功率分配开展工作,主要工作概括如下:(1)对风电机组和风电场展开研究,分析风力发电机组运行特性、风力发电机组控制策略、风电场的控制策略。
(2)提出了一种简单有效的风电场有功功率分配算法,可以合理利用各机组的有功容量,优化风电场内有功调度分配指令,减少机组控制系统动作次数,平滑风电机组出力波动。
(3)优化风机控制算法后,通过现场实际采集数据将所提方法与现有方法进行了比较,验证了所提方法的合理性。
关键词:风电机组、风电场、有功功率控制、AGCAbstractWith increasing wind power capacity, to achieve large-scale wind power is an inevitable trend of wind power development. However, since the wind is a volatile, random and intermittent strong clean energy, resulting in wind power dispatch is different from conventional energy sources. And the wind farm is an organic combination for a large number of wind turbines, wind farms under active intelligent distribution layer hair is also included in the grid scheduling section. Based on this, the active allocation and scheduling for grid scheduling side active layer wind farm work, the main work is summarized as follows:(1)Wind turbines and wind farms to expand research, in-depth analysis of the operating characteristics of wind turbines, wind turbine control strategy, control strategies of wind farms.(2)This paper proposes a simple and effective wind power active power allocation algorithm, can reasonable use each unit capacity, according to the optimization of wind farms in active dispatching command, decrease The Times of turbine control system action smooth wind power output fluctuation unit.(3)After optimization of the fan control algorithm, through the practical field data collected will be presented method are compared with those of the existing method, the rationality of the proposed method was verified.Keywords:wind turbine, wind farm, active power control目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 课题研究背景 (1)1.2 有功功率控制的现状 (1)第2章风力发电机组及风电场有功控制基础 (2)2.1 风力发电机组运行原理 (2)2.1.1 风电机组的组成 (2)2.1.2 风电机组数学模型 (2)2.1.3 风力发电机组运行特性 (8)2.1.4 风力发电机组控制策略 (9)2.2 风电场有功功率控制 (10)2.2.1 风电场的基本结构 (10)2.2.2 风电场的控制策略 (11)第3章风电场内有功功率控制策略 (13)3.1 风电场有功功率控制的基本要求 (13)3.2 风电场有功功率工作模式 (13)3.3 风电场有功功率控制状态 (14)3.5 风电场实测数据对比 (15)3.5.1 风电场电气接线 (15)3.5.2 单台风力发电机组测试 (15)第4章结论 (19)参考文献 (20)第1章绪论1.1 课题研究背景相比于常规的火电和燃气电站,风电场的有功调节能力十分有限。
6.25mw的风力发电机组参数

风力发电机组是利用风能转换为机械能,再通过发电机将机械能转换成电能的装置。
而风力发电机组参数则是评估一台风力发电机组性能的重要标准。
今天,我将为您深入探讨6.25mw的风力发电机组参数。
1. 风力发电机组的基本参数6.25mw的风力发电机组通常包括了风轮直径、塔筒高度、发电机额定功率、转速范围、风速范围等基本参数。
其中,风轮直径和塔筒高度直接影响了风力的捕捉效率,而发电机的额定功率和转速则是评估发电机组性能的关键指标。
2. 风力发电机组的风速特性针对6.25mw的风力发电机组,其风速特性是评估其性能的重要参数之一。
风速特性主要包括了切入风速、额定风速和切出风速。
切入风速是指风力发电机组开始转动发电的最低风速,额定风速是指风力发电机组可以输出额定功率的风速,而切出风速则是指当风速过大时风力发电机组停止运转的风速。
3. 风力发电机组的发电机类型在6.25mw的风力发电机组中,发电机类型通常有直驱式和变速双馈式两种。
直驱式发电机由于取消了传动系统,整体结构更加简单且效率更高;而变速双馈式发电机则可以通过调节双馈风机的功率来实现对风机输出功率的平滑调节,使得发电机组在不同的风速下都能保持较高的效率。
4. 风力发电机组的运维成本另外,6.25mw的风力发电机组的运维成本也是需要考虑的参数之一。
运维成本主要包括了设备维护费用、人员管理费用和备件更换费用等。
考虑到风力发电机组的运行周期一般比较长,因此低运维成本可以有效降低发电成本。
5. 个人观点和理解从我个人的观点来看,6.25mw的风力发电机组参数在评估时需要考虑的因素非常多,不仅包括了基本参数和风速特性,还需要考虑发电机类型和运维成本等因素。
只有综合考虑这些参数,才能更好地评估一台风力发电机组的性能和经济性。
总结回顾:通过本文的深入探讨,我希望您对6.25mw的风力发电机组参数有了更深入的了解和认识。
我们从基本参数、风速特性、发电机类型和运维成本等多个方面全面分析了风力发电机组的关键参数,希望能为您提供一个全面、深入和灵活的认识。
风力机特性概述

风力机特性概述李志(西藏自然科学博物馆,西藏拉萨850000)摘要:风能作为一种发展比较快,而且开发利用风能进行发电已经规模化,在很多国家都利用风力进行发电,因此风力发电已经得到了很多研究人员的关注。
风力机是将风能转化为电能的机械。
目前,垂直轴风力机和水平轴风力机是风力发电行业的主要研究方向,风力机技术具有很多优点,风能利用率高,垂直风力机和水平风力机互补优劣,垂直风力机系统结构稳定,水平风力机的结构紧凑。
文章对垂直风力机和水平风力机进行了比较综合的概述,对风力机的空气动力学性能研究和叶片进行详尽的分析。
关键词:垂直风力机水平风力机空气动力学性能风轮叶片性能优化化石能源的不断损耗和其不可再生的特点已经对人类的未来可持续发展战略产生了不可估量的影响。
现在,很多发达国家和我国都对能源资源的利用实施有效的规划,都在向可再生能源领域进军。
我国在2005年颁布《中国可再生能源法》中明确规定了国内的可再生能源资源的重要战略地位,为国内的可再生能源的发展提供有效并且具有强有力的法律保障。
在许多国家,由于风力资源十分丰富,所以得到了充分的发展研究和开发利用。
对风能资源的利用主要表现在风力发电方面,到2008年底的时候,全球的风电机组的总装机容量早就超过了1×108kW。
而在我国对风能的利用即风电机组总装机容量只达到了1200万kW。
在2009年底时,全球的风力发电机装机总量达到了3.75万兆瓦。
全球风电平均每年都增加7×107kW,风电技术在电力市场中十分受欢迎[1]。
风力发电事业在新能源和可再生能源在世界范围内得到了密切的关注,同时,也得到了最快的发展。
风能不像其他可再生能源一样需要比较尖端的科研技术水平,风能其利用起来也比较方便简单。
我国的风能资源极其丰富,对风能的规模化发展必将成为我国不可缺少的一部分。
风力机,也就是风力发电机组,是一种能够将风能有效的转化成为电能的机电装置。
风电设备若要作为公共电网的电源进行使用,采用的是并网发电的工作方式,这是对风能规模化利用的一个例子。
风力发电介绍

目前东北电网风电发展呈不断加速趋势,仅赤峰地区赛罕坝、东山、孙家营三个风场,已投产装机容量就达270MW。
风电场建设周期短,投产快,而且受国家政策扶持。
风电的快速发展必然对今后东北电网产生重要影响。
为使有关人员对风电有一个初步了解,特编辑整理了这个小资料。
不足之处,敬请指正。
---调度处。
名称装机总容量(MW)风机型号装机台数(台)容量(KW)达里51.36NM48-7504836000 NM48-6001911400 NM48-66063960赛罕坝120.7V52-850142120700东山49.3V52-8505849300孙家营100.5S48-750134100500合计321.86LGJ-4*300林东热水大板乌丹元宝山发电厂(2100MW)至董家赤峰元宝山新惠至建平达里5# 30MW达里3# 19MW达里6#22MW LGJ-18516LGJ-2*120773.1LGJ-120LGJ-30079.6LGJ-30090LGJ-30085LGJ-24056.3LGJ-40029.9LGJ-2*24025.1LGJ-40034.6LGJ-2*300平庄宁城LGJ-40068.7LGJ-40040.5图例天山LGJ-40070.3达里6#28MW LGJ-2*1855LGJ-2*18519LGJ-400107达里升压站达里6#50MWLGJ-2*18516赤峰热电厂LGJ-4002.9西郊LGJ-40023LGJ-40076.7LGJ-400120.5LGJ-40084LGJ-4006大板开关站5.3214LGJ-400127LGJ-400136LGJ-2*3006.0图2-2 2006年赤峰地区电网规划图2LGJ-400107发电厂风电场220kV变电所66kV变电所500kV线路220kV线路66kV线路35kV线路热电厂220kV开关所LGJ-40031.2赛罕坝120MW 孙家营子(含五道沟)100.5MWLGJ-2*12020翁根山一期49.5MW东山50MW510152025100200300400500600700800P (k W )v(m/s)5101520251002003004005006007008009001000P (k W )v(m/s)出力范围(%)累计概率(%)累计小时数(小时)达里赛罕坝孙家营达里赛罕坝孙家营1000.00 2.340.060.00205.39 5.33 90 3.3517.2625.90293.831512.392268.92 809.3423.3437.08818.332044.633248.11 7012.9628.5442.841135.002499.933752.78 6016.9633.8147.781485.502961.504185.62 5021.0539.2552.491844.333438.404598.13 4025.9645.2657.082274.173964.585000.30 3032.5052.6662.122847.334612.585441.64 2040.9861.7667.783589.505410.275937.48 1055.3273.4276.124845.836431.926667.83 <1044.6826.5823.883914.1672328.412092.241020304050<1020 30 40 50 60 70 80 90 100输出功率(%)概率 %达里风电场102030<102030405060708090100>=100输出功率(%)概率 %赛罕坝风电场102030<102030405060708090100>=100输出功率(%)概率 %孙家营风电场20406080100120140160123456789101112月份风电场出力(M W )达里赛罕坝孙家营翁根山3月4日暴风雪天气出力分析0.10.20.30.40.50.60.70.80.91123456789101112131415161718192021222324塞罕坝东山变孙家营3月31日沙尘暴天气出力分析0.10.20.30.40.50.60.70.80.91123456789101112131415161718192021222324塞罕坝东山变孙家营小时概率出力特性00.10.20.30.40.50.60.71点4点7点10点13点16点19点22点赛罕坝东山孙家营日最大值分析0.20.40.60.811.21月1 日1月7 日1月13 日1月19 日1月25 日1月31 日2月6 日2月12 日2月18 日2月24 日3月2 日3月8 日3月14 日3月20 日3月26 日赛罕坝东山变孙家营最大值均方差东山对塞罕坝0.000693孙家营对塞罕坝0.000625日最小值分析0.10.20.30.40.50.60.70.81月1 日1月7 日1月13 日1月19 日1月25 日1月31 日2月6 日2月12 日2月18 日2月24 日3月2 日3月8 日3月14 日3月20 日3月26 日赛罕坝东山孙家营最小值均方差东山对塞罕坝0.000186孙家营对塞罕坝0.000299峰谷差分析0.20.40.60.811.21月1 日1月7 日1月13 日1月19 日1月25 日1月31 日2月6 日2月12 日2月18 日2月24 日3月2 日3月8 日3月14 日3月20 日3月26 日赛罕坝峰谷差东山变峰谷差孙家营峰谷差峰谷差均方差东山对塞罕坝0.000693孙家营对塞罕坝0.000625最大值均方差东山对塞罕坝0.000693孙家营对塞罕坝0.000625最小值均方差东山对塞罕坝0.000186孙家营对塞罕坝0.000299峰谷差均方差东山对塞罕坝0.000693孙家营对塞罕坝0.000625风场出力频度分析1002003004005006007000.10.20.30.40.50.60.70.80.91赛罕坝东山变孙家营1月8日出力分析0.20.40.60.81123456789101112131415161718192021222324塞罕坝东山变孙家营2月18日出力分析0.20.40.60.81123456789101112131415161718192021222324塞罕坝东山变孙家营3月9日出力分析0.10.20.30.40.50.60.70.80.91123456789101112131415161718192021222324塞罕坝东山变孙家营4.5 随机日同调性分析均方差东山对塞罕坝孙家营对塞罕坝1月8日0.05880.10662月18日0.07280.10833月9日0.06160.0786。
风力发电机的简介

浅析风力发电机组一.引言随着全球化石能源的枯竭和供应紧张以及气候变化形势的日益严峻,世界各国都认识到了发展可再生能源的重要性,风能作为清洁可再生能源之一,受到了各国的高度重视,世界风电产业也因此得到了迅速发展。
中国风能资源十分丰富:陆上和近海可供开发和利用的风能储量分别为2.53亿千瓦和7.5亿千瓦,具有发展风能的潜力和得天优厚的优势。
在未来的能源市场上,充分开发和挖掘这一潜力和优势,将有助于持续保持本国的能源活力和维持经济的可持续发展。
在开发利用风能的过程中,风电场的建设是其必须的环节,而风电机组的应用又是建设风电场的重中之重。
二.风力发电机组的分类(1)风力发电机组类型按容量分容量在0.1~1kW为小型机组,1~100kW为中型机组,100~1000kW 为大型机组 ,大于10000kW 为特大型机组。
(2)风力发电机组类型按风轮轴方向分水平轴风力机组:风轮围绕水平轴旋转。
风轮在塔架前面迎风的称为上风向风力机,在塔架后面迎风的称为下风向风力机。
上风向风力机需利用调向装置来保持风轮迎风。
垂直轴风力机组:风轮围绕垂直轴旋转,可接收来自任何方向的风,故无需对风。
垂直轴风力机又分为利用空气动力的阻力作功和利用翼型的升力作功两个主要类别。
(3)风力发电机组类型按功率调节方式分定桨距机组:叶片固定安装在轮毂上,角度不能改变,风力机的功率调节完全依靠叶片的气动特性(失速)或偏航控制。
变桨距(正变距)机组:须配备一套叶片变桨距机构,通过改变翼型桨距角,使翼型升力发生变化从而调节输出功率。
主动失速(负变距)机组:当风力机达到额定功率后,相应地增加攻角,使叶片的失速效应加深,从而限制风能的捕获。
(4)风力发电机组类型按传动形式分高传动比齿轮箱型机组:风轮的转速较低,必须通过齿轮箱、齿轮副的增速来满足发电机转速的要求。
齿轮箱的主要功能是增速和动力传递。
直接驱动型机组:应用了多极同步风力发电机,省去风力发电系统中常见的齿轮箱,风力机直接拖动发电机转子在低速状态下运转。
风力发电机组的分类及各自特点

风力发电机组的分类及各自特点风力发电机组的分类及各自特点风力发电机组主要由两大部分组成:风力机部分――它将风能转换为机械能;发电机部分――它将机械能转换为电能。
根据风机这两大部分采用的不同结构类型、以及它们分别采用的技术方案的不同特征,再加上它们的不同组合,风力发电机组可以有多种多样的分类。
(1) 如依风机旋转主轴的方向(即主轴与地面相对位置)分类,可分为:“水平轴式风机”――转动轴与地面平行,叶轮需随风向变化而调整位置;“垂直轴式风机”――转动轴与地面垂直,设计较简单,叶轮不必随风向改变而调整方向。
(2) 按照桨叶受力方式可分成“升力型风机”或“阻力型风机”。
(3) 按照桨叶数量分类可分为“单叶片”﹑“双叶片”﹑“三叶片”和“多叶片”型风机;叶片的数目由很多因素决定,其中包括空气动力效率、复杂度、成本、噪音、美学要求等等。
大型风力发电机可由1、2 或者3 片叶片构成。
叶片较少的风力发电机通常需要更高的转速以提取风中的能量,因此噪音比较大。
而如果叶片太多,它们之间会相互作用而降低系统效率。
目前3 叶片风电机是主流。
从美学角度上看,3叶片的风电机看上去较为平衡和美观。
(4) 按照风机接受风的方向分类,则有“上风向型”――叶轮正面迎着风向(即在塔架的前面迎风旋转)和“下风向型”――叶轮背顺着风向,两种类型。
上风向风机一般需要有某种调向装置来保持叶轮迎风。
而下风向风机则能够自动对准风向, 从而免除了调向装置。
但对于下风向风机,由于一部分空气通过塔架后再吹向叶轮, 这样, 塔架就干扰了流过叶片的气流而形成所谓塔影效应,使性能有所降低。
(5) 按照功率传递的机械连接方式的不同,可分为“有齿轮箱型风机”和无齿轮箱的“直驱型风机”。
有齿轮箱型风机的桨叶通过齿轮箱及其高速轴及万能弹性联轴节将转矩传递到发电机的传动轴,联轴节具有很好的吸收阻尼和震动的特性,可吸收适量的径向、轴向和一定角度的偏移,并且联轴器可阻止机械装置的过载。
风能发电在电力系统中的特点
风能发电在电力系统中的特点风能是一种清洁的、有可靠成本效益的发电资源,具有很高的环境效益和社会效益。
随着风电技术发展,我国风电装机容量不断上升,风力发电将逐步成为电力系统重要的电力来源。
但受自然、技术等因素影响,风力发电引起的电压波动、闪变和谐波等电能质量问题阻碍了其发展。
本文结合风电的运行特点,风电的并网方式,风电调频调峰以及风电调度对风电在电力系统的特点作出分析。
0引言新能源的使用正在逐步为人们所重视,光伏、风电等新能源发电系统装机容量也在逐年扩增,根据往年的数据,预测在2020年左右风机的装机容量将达到2亿千瓦。
但大规模风电具有随机波动性以及不可准确预测性,造成了电力系统调度运行方面的困难,由于风电场和电网建设不同步、风电特性和电网调峰能力不匹配等原因,在一些地区出现了弃风现象,造成了能源浪费和经济损失,导致弃风消纳问题在中国的形势极为严峻。
针对风电运行的特点,可以优化风电调频,进行风电功率预测,设计风电接入电网的序列优化调度,完成风电并网后从不同时间尺度上通过优化达到经济、可靠、安全运行的目标。
1风电运行特点(1)风电出力具有随机性、波动性,风电出力随机性及波动性明显。
波动幅度大并且波动频率也无规律性;(2)风电出力有时与电网负荷呈现明显的反调节特性一“高风速或低负荷”;(3)受气象因素影响,风电出力日间可能波动很大,以至于在极端情况下,风电出力可能在0~100%范围内变化;(4)风电年利用小时数偏低,风电场年利用小时数参差不齐,一般在2000h 左右。
我国2018年风电年平均利用小时数为2095;(5)风电功率调节能力差,风电功率特性决定风机出力随风力变化而变化,风机在采用不弃风的方式下,只能提供系统故障状况下的有限功率调节。
机组本身的运行特性和风资源的不确定性,使得风电机组不具备常规火电机组的功率调节能力。
2风电并网的方式风电并网主要有两种方式:分散接入方式、集中接入方式(1)分散接入主要用于风电开发规模小,以就地消纳为主的情况,这种方式下,风电接入电压等级低对系统运行造成的影响也比较小。
风力发电机组 功率特性试验方法
风力发电机组功率特性试验方法1范围本部分规定了测试单台风力发电机组功率特性的方法,并适用于并网发电的所有类型和规格的风力发电机组的试验。
本部分适用于确定一台风力发电机组的绝对功率特性,也适用于确定不同结构的各种风力发电机组功率特性之间的差异。
风力发电机组的功率特性由测定的功率曲线确定,并用来估计年发电量(AEP)。
测得的功率曲线也采集的瞬时风速和功率输出值确定,此项试验应在试验场有足够长的测量时间,并建立在有效的统计数据库的基础上,该数据库应覆盖一定的风速范围和各种风况条件。
年发电量利用测得的功率曲线对应于参考风速频率分布计算获得,假设可利用率为100%。
本部分描述了一个测量方法,这种方法要求测量的功率曲线和导出的年发电量应由补充误差及其综合影响修正。
2 定义下列定义适用于本部分。
2.1 精度accuracy被测量物的测量值与真实值的接近程度。
2.2 年发电量annual energy production利用功率曲线和轮毂高不同风速频率分布估算得到的一台风力发电机组一年时间内生产的全部电能。
计算中假设可利用率为100%。
2.3 可利用率availability在某一期间内,除去风力发电机组因维修或故障未工作的时数后余下的时数与这一期间内总时数的比值,用百分比表示。
2.4 复杂地形complex terrain试验场地周围属地形显著变化的地带或有能引起气流畸变的障碍物的地带。
2.5 外推功率曲线extrapllated power curve用估计方法对测出的功率曲线从测量的最大风速延伸到切出风速。
2.6 气流畸变flow distortion由障碍物、地形变化或其他风力机引起的气流改变,其结果是相对自由来流产生了偏离,造成一定程度的风速测量误差。
2.7 轮毂高度(风轮)hub height(wind turbine)从地面到风轮扫掠面中心的高度。
2.8 测量功率曲线measured power curve用图形和表格表示的按正确方法测试、修正和标准化处理的风力发电机组净电功率输出。
风电出力特性研究及其应用
风电出力特性研究及其应用风力发电是一种清洁、可再生的能源,其发展受到了全球各国政府和社会的广泛关注和支持。
随着风电装机容量的不断增加,风电出力特性的研究和应用也变得越来越重要。
本文将就风电出力特性的研究现状、影响因素和应用进行介绍和分析。
一、风电出力特性的研究现状风电出力特性是指在一定的时间尺度内,风力发电机组的发电功率与风速之间的关系。
通常情况下,风速越大,发电功率也就越大,但是风电出力特性并不是简单的线性关系,而是受到多种因素的影响。
目前,对于风电出力特性的研究主要包括以下几个方面:1. 风力发电机组的功率曲线特性:风力发电机组的功率曲线是指在不同的风速下,发电机组的发电功率输出情况。
一般来说,风力发电机组的功率曲线呈现出“S”型曲线,即在较低的风速下,发电功率较小;在中等风速下,发电功率迅速增加;当风速达到一定值后,发电功率趋于稳定。
2. 风场的风速分布特性:风速分布是指在一定时间尺度内,不同风速的出现频率和持续时间。
通过对风速分布进行统计和分析,可以揭示出不同季节、不同气象条件下的风场特性,为风电出力的预测和规划提供依据。
3. 风电出力的波动特性:由于风速的不稳定性和不确定性,风电出力也呈现出较大的波动性。
研究风电出力的波动特性,可以为风电系统的运行和管理提供支持。
4. 风电出力与系统可靠性:风力发电机组的可靠性是风电系统设计和运行的重要指标之一,研究风电出力与系统可靠性的关系,可以为风电场的运行和维护提供技术支持。
二、影响风电出力特性的因素风电出力特性受到多种因素的影响,包括外部气象条件、风电设备的性能特性和运行管理等方面。
以下是一些常见的影响因素:1. 风速和风向:风速和风向是直接影响风电出力的主要因素。
风速越大,风电出力也就越大;而风向的变化也会影响风电出力的稳定性和波动性。
2. 风机型号和设计特性:不同型号和设计特性的风力发电机组在不同风速条件下的出力特性可能存在差异,如功率曲线的斜率、启动风速等。
风力发电期末总结
17.双馈异步发电机的功率传递关系:(1)亚同步状态
当发电机的转速n小于同步转速n1
时,由转差频率为f2的电流产生的旋转磁场转速n2与转子方向相同,此时励磁变流器向发 电机转子提供交流励磁,发电机由定子发出电能给电网。2)超同步状态 当发电机的转速 n大于同步转速n1时,由转差频率为f2的电流产生的旋转磁场转速n2与转子转动方向相反, 此时发电机同时由定子和转子发出电能给电网,励磁变流器的能量流向逆向。(3)同步运 行状态 当发电机的转速n等于同步转速n1时,处于同步状态。 11.风力发电机组的主要机组类型:(1)上风向机组和下风向机组 水平轴风电机组根据在 运行中风轮与塔架的相对位置,分为上风向风力发电机组和下风向风力发电机组(2)失速 机组与变桨机组 当风速超过额定风速时,为了保证发电机的输出功率维持在额定功率附 近,需要对风轮叶片吸收的气动功率进行控制。(3)带增速齿轮箱的风电机组、直驱风电 机组和半直驱风电机组 风电机组通过传动系统连接风轮和发电机,把风轮产生的旋转机 械能传输到发电机,并使发电机转子达到所需要的转速。(4)陆地风电机组和海上风电机 组 由于陆地地形地貌限制以及风电场噪声等对环境的影响,自20世纪90年代起,国外开
小型风力发电机特性

小型风力发电机特性风能是没有公害的能源之一,而且它取之不尽,用之不竭。
对于缺水、缺燃料和交通不便的沿海岛屿、草原牧区、山区和高原地带,可因地制宜地利用风力发电。
风能作为一种清洁的可再生能源,越来越受到世界各国的重视。
把风的动能转变成机械能,再把机械能转化为电能,这就是风力发电。
风力发电技术是一项多学科的,可持续发展的,绿色环保的综合技术。
风力发电所需要的装置,称作风力发电机组。
风力发电机组主要由两大部分组成:风力机部分将风能转换为机械能;发电机部分将机械能转换为电能。
一、小型风力发电机分类小型风力发电系统效率很高,但它不是只由一个发电机组成的,而是一个有一定科技含量的小系统:风力机十风力发电机十控制器十蓄能装置。
风力发电机由机头、转体、尾翼、叶片组成。
每一部分都很重要,各部分功能为:叶片用来接受风力并通过机头转为电能;尾翼使叶片始终对着来风的方向从而获得最大的风能;转体能使机头灵活地转动以实现尾翼调整方向的功能;机头的转子是永礅体,定子绕组切割磁力线产生电能。
小型风力发电按其设计的方式与结构可分为垂直轴风力发电机( VAWT)和水平轴风力发电机( HAWT)两种。
水平轴风力发电机的转动轴与风向平行,大部分水平轴式风力发电机其叶片会随风向变化而不断调整位置,因此较易受地形、地物的影响。
垂直轴风力发电机的转动轴与风向垂直。
此型的优点为设计较简单,因为不必随风向改变而调整方向,可分为打蛋形转子( Darrieus)和桶形转子( Savonius)等[打蛋形转子(Darrieus)是由法国及航天工程师Georges Jean MarieDarrieus于1931年发明。
桶形转子(Savonius)为荷兰工程师Sigurd J.Savonius 于1922年发明]。
垂直轴风力发电机与水平轴风力发电机比较见表2 -1。
二、水平轴风力机风轮轴线的安装位置与水平面夹角不大于15度的风力机称水平轴风力机,水平轴风力机的风轮围绕一个水平轴旋转,风轮轴与风向平行,风轮上的叶片是径向安置的,与旋转轴相垂直,并与风轮的旋转平面成一角度(称为安装角)。
风力发电机组性能分析与可靠性评估

风力发电机组性能分析与可靠性评估一、引言风力发电是一种可再生能源,在近年来得到了广泛应用和发展。
作为其中的重要组成部分,风力发电机组的性能和可靠性评估对于保障风力发电系统的稳定运行至关重要。
本文将对风力发电机组的性能进行分析和可靠性评估,以提供有关运行和维护管理的相关信息和指导。
二、风力发电机组性能分析1. 性能指标风力发电机组的性能指标包括功率输出、风速特性、起动风速、切入风速、额定风速、切出风速、关断风速等。
分析这些性能指标可以揭示风力发电机组的最大功率输出、适用风速范围、运行稳定性等特征。
2. 动态响应与响应特性风力发电机组的动态响应和响应特性是评估其性能的重要指标。
这些特性包括起动时间、响应时间、动态功率输出特性以及在不同风速下的响应能力等。
通过对这些特性的分析,可以了解风力发电机组在不同工况下的稳定性和灵活性。
3. 故障率和失效分析对风力发电机组故障率和失效进行分析,有助于评估其可靠性和维护需求。
故障率可以通过统计故障发生的频率和持续时间等得到,失效分析则可以通过对故障原因进行调查,了解故障的根本原因和改善措施。
三、风力发电机组可靠性评估1. 可靠性指标风力发电机组的可靠性指标主要包括可用性、可靠度、维修性和维护性。
可用性指标反映了风力发电机组在一定的运行时间内能够正常工作的概率;可靠度指标则表示在一定时间内无故障工作的概率;维修性和维护性指标则反映了维修和维护所需的时间和资金成本。
2. 可靠性分析方法可靠性评估可以使用多种方法进行,如故障数分析、故障树分析、失效模式和影响分析等。
这些方法可以帮助从不同角度评估风力发电机组的可靠性,找出潜在的问题和改进点。
3. 可靠性改进措施根据可靠性评估的结果,可以制定相应的可靠性改进措施。
这些改进措施可以包括提高关键部件的设计和制造质量、加强维护管理、改进运行策略等。
通过实施这些改进措施,可以提升风力发电机组的可靠性和维护效率。
四、结论风力发电机组的性能分析和可靠性评估对于保障其稳定运行和提高发电效率至关重要。
风力发电机PPT课件

励磁调节器
蓄电池组
2024/1/12
图3-18硅整流自励式交流同步发电机电路原理图
第30页/共119页
(4)电容自励式异步发电机
电容自励式异步发电机是在异步发电机定子绕组的输出端接上电
容,以产生超前于电压的容性电流建立磁场,从而建立电压。其电路
示意图如下图所示。
A B
2024/1/12
第34页/共119页
2024/1/12
第35页/共119页
2024/1/12
双馈异步发电机工作原理:
异步发电机中定、转子电流产生的旋转磁场始终是相对静止的,当
发电机转速变化而频率不变时,发电机转子的转速和定、转子电流的频
率关系可表示为:
f1
p n 60
f2
式中
f1——定子电流的频率(Hz),f1=pn1/60,n1 为同步转速;
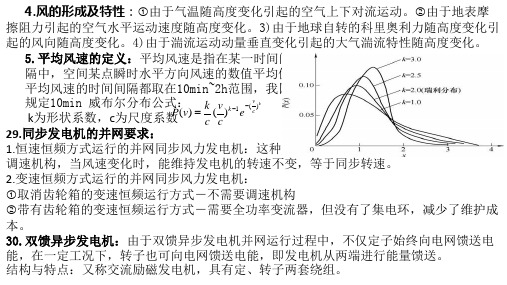
风力等级与风速的关系: N 0.1 0.824N 1.505
式中 VN——N级风的平均风速(m/s); N——风的级数。
2024/1/12
第10页/共119页
4、风能
(1) 风能密度,空气在一秒钟内以速度ν流过单位面积产生的动
能。
E 0.5 3
表达式为:
(2) 风能,空气在一秒钟时间内以速度ν流过面积为S截面的动能。
SSW S
SSE
2024/1/12
第9页/共119页
2、风速
由于风时有时无、时大时小,每一瞬时的速度都不相同,所以 风速是指一段时间内的平均值,即平均风速。
3、风力
风力等级是根据风对地面或海面物体影响而引起的各种现象, 按风力的强度等级来估计风力的大小。国际上采用的为蒲福风级, 从静风到飓风共分为13个等级。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四章风力发电机组的运行特性4.1风力发电系统的一般构成及分类 (1)4.2风力机的功率调节原理 (3)4.2.1风力机的输出功率 (3)4.2.2风力机功率调节原理 (5)4.2.3风力机相关技术参数 (5)4.3三相交流异步电机的基本电磁理论 (7)4.3.1三相交流异步电机的结构 (7)4.3.2三相交流异步电机的基本工作原理 (8)4.3.3静止坐标系下的三相交流异步电机的数学模型 (10)4.3.4 dq旋转坐标系下的三相交流异步发电机的数学模型 (13)4.4 电压源型变流器工作原理及运行特性 (17)4.4.1 三相电压源型变流器的基本工作原理 (17)4.4.2 三相电压源型变流器联网运行特性 (19)4.4.3 背靠背四象限电压源型变流器联网运行特性 (20)4.5定速型风电机组的运行特性 (23)4.5.1鼠笼式感应风电机组的运行原理 (23)4.5.2 鼠笼式感应风电机组的风速-功率特性 (26)4.5.3鼠式笼感应风电机组的运行控制 (27)4.6变速型风电机组的运行特性 (31)4.6.1双馈感应式发电机组的转速调节原理 (31)4.6.2双馈感应式风电机组的运行控制原理 (33)4.6.3双馈感应式风电机组的功率传输特性 (34)4.6.4双馈感应式异步风电机组的撬杠保护 (36)4.6.5双馈感应式异步风电机组的运行操作 (38)4.7直驱式永磁同步风电机组的运行特性 (40)4.7.1永磁同步发电机的数学模型 (40)4.7.2永磁同步发电机的外特性 (41)4.7.3直驱式永磁同步风电机组的运行控制原理 (42)4.7.4直驱式永磁同步风电机组的运行操作 (44)参考文献 (46)第4章风力发电机组的运行特性风力发电机组由风力机和发电机及其控制系统组成,其中风力机完成风能到机械能的转换,发电机及其控制系统完成机械能到电能的转换[1]。
本章将首先介绍风力发电系统的构成及各主要设备的运行原理,在此基础上,介绍恒速恒频式、变速恒频式和永磁直驱式等三种典型风电机组运行特性。
4.1风力发电系统的一般构成及分类风力机和发电机是风力发电系统的基本部件,随着电力电子技术的飞速发展,现代大容量风力发电机组还引入了电力电子变换器,以实现发电机电磁功率与风力机机械功率的柔性匹配,进而改善风电机组的整体运行性能[2]。
图4-1风力发电系统的一般构成为风力发电系统的一般构成[3],主要包括风力机、齿轮箱(可选)、发电机、电能变换装置(可选)等。
风能叶轮齿轮箱(可选)发电机电能变换(可选)输电网机械能电能能量转换与能量控制能量传输能量转换能量转换与能量控制能量传输用户/负荷图4-1 风力发电系统的一般构成根据图4-1风力发电系统的一般构成中各部件类型及组合的不同,目前主要有以下三类风力发电系统:1)恒速恒频式(Constant Speed Constant Frequency, CSCF)风力发电系统,其特点是在有效风速范围内,发电机组产生的交流电能的频率恒定,发电机组的运行转速变化范围很小,近似恒定;通常该类风力发电系统中的发电机组为鼠笼式感应发电机组。
2)变速恒频式(Variable Speed Constant Frequency, VSCF)风力发电系统,其特点是在有效风速范围内,发电机组定子发出的交流电能的频率恒定,而发电机组的运行转速变化;通常该类风力发电系统中的发电机组为双馈感应式异步发电机组。
3)变速变频式(Variable Speed Variable Frequency, VSVF)风力发电系统,其特点是在有效风速范围内,发电机组定子侧产生的交流电能的频率和发电机组转速都是变化的,因此,此类风力发电系统需要串联电力变流装置才能实现联网运行。
通常该类风力发电系统中的发电机组为永磁同步发电机组。
图4-2~图4-4是几种典型风力发电系统的结构示意图。
风力机鼠笼式感应发电机背靠背四象限变流器风力机背靠背四象限变流器图4-4 变速变频直驱式风力发电系统结构示意图4.2风力机的功率调节原理风力机是风力发电系统中的原动机,其功能是将风的动能转换为机械能,驱动后续装置——发电机旋转发电。
风力机主要包括风轮、塔架和对风装置。
风轮是由轮毂及安装于轮毂上的叶片组成,是风力机捕获风能的部件;塔架是为了风轮能在地面上较高的风速中运行;对风装置是实现风向跟踪装置,使风轮总能处于最大迎风方向。
现代大容量风力机为水平轴风力机,其优点是扫风面积大、风能利用系数C p 高(C p 能大于0.5)等。
按风功率调节方式分类,风力机又可分为定桨距风力机和变桨距风力机两种。
定桨距风力机其风功率捕获控制完全依靠叶片的气动性能,难以对风功率的捕获进行精确的控制,其优点是结构简单、造价低、同时具有较好的安全系数。
变桨距风力机通过叶片桨距角调节实现风能捕获控制,在低风速条件下具有较高的风能捕获效率,高于额定风速时拥有平稳的风功率输出。
因此得到了广泛的应用。
但其控制系统较为复杂,对风速的跟踪有一定的延时,可能导致风力机的瞬间超载[4]。
4.2.1风力机的输出功率风力机从风中吸收的功率可用下式表示:3m p p 1w 0.5C A w P P V ρ=C = (4-1) 式中:P m 为风轮输出功率(W ),C p 为风能利用系数——表征风力机捕获风能能力的参数,A 1=R 2为风力机叶片扫略面积(m 2),为空气密度(kg/m 3),V w 为风速(m/s ),R 为风力机叶片半径(m )。
由式(4-1)可知,风力机从风中吸收的功率与空气密度、风速V w 、叶片半径R 和风能利用系数C p 等都有关。
在任一时刻,由于无法对空气密度、风速、叶片半径等施加控制,因此,为了获得最大风能捕获,唯一的控制参数便是风能利用系数C p 。
众所周知,如果接近风轮的空气的全部动能都被转动的风轮叶片所吸收,则风轮后的空气就不动了,然而空气不可能不动,所以风力机的风能捕获效率总是小于1;根据Betz 理论,风力机的风能利用系数的理论最大值是0.59[5],其实际值通常在0.47左右。
风力机的风能利用系数Cp与风力机叶片参数(如攻角、桨距角、叶片翼型)和风力机转速等有关。
在实际应用中,往往用Cp-叶尖速比的关系曲线来表示该风轮的空气动力特性,其中风轮的叶尖速比定义为风轮叶尖的线速度与风速之比,即:=R/V(4-2)式中:为风轮旋转角速度;R为风轮半径;V为风速。
图4-5 现代大功率风力机的C p-特性曲线示意图由图4-5可知,当叶尖速比取某一特定值时Cp 值最大,与Cp最大值对应的叶尖速比称之为最佳叶尖速比。
因此,为了使Cp维持最大值,当风速变化时,风力机转速也需要随之变化,使之运行于最佳叶尖速。
图4-6 风力机的功率调节特性曲线(Popt是各风速下风力机最大输出功率点曲线——最佳功率曲线)图4-6是不同风速下(风速V1、V2、V3和V4且V1>V2>V3>V4)风力机的输出功率特性。
由图可知,对于某给定风速,风力机有一最佳转速,在此转速下风力机捕获的风能最大,该转速即为最佳叶尖速。
不同风速下的风力机最大输出功率点连线即为风力机最佳功率曲线。
4.2.2风力机功率调节原理由前面分析可知,风力机输出功率与风速的三次方成正比,当风速超过额定风速时,风力机输出功率将超过额定值,进而导致发电机组、齿轮传动机构等过载运行,威胁着风力发电系统的安全运行。
因此,当风速超过额定风速时,往往需要对风力机的输出功率进行调节,以保证发电机、齿轮箱等设备运行于允许范围内。
由前面的分析可知,调节风力机输出功率的有效途径是调节风能利用系数C p ,而Cp与风力机转速、风力机叶片空气动力特性密切相关,因此,通过调节风力机转速或风力机叶片空气动力特性即可实现风力机输出功率的调节。
1.定桨距风力机功率调节定桨距风力机是根据风力机叶片失速特性来调节风力机的输出功率。
当风速超过额定风速时,风力机叶片翼型发生变化,使风力机风轮捕获风能的能力下降,保证风力机输出功率不随风速上升而增加,而使输出功率不超过额定功率。
2.变桨距风力机功率调节变桨距风力机是通过调节风力机桨距角来改变叶片的风能捕获能力,进而调节风力机的输出功率。
风力机启动时,调节风力机的桨距角,限制风力机的风能捕获以维持风力机转速恒定,为发电机组的软并网创造条件。
当风速低于额定风速时,保持风力机桨距角恒定,通过发电机调速控制使风力机运行于最佳叶尖速,维持风力机组在最佳风能捕获效率下运行。
当风速高于额定风速时,调节风力机桨距角,使风轮叶片的失速效应加深,从而限制风能的捕获。
4.2.3风力机相关技术参数为了能够准确地描述风力机的运行性能,通常定义如下技术参数:1.风速某一高度连续10min所测得各瞬时风速的平均值。
一般以草地上空10m高的10min内风速的平均值为参考。
2.有效风速风速随机性很大,并不是所有风速都能使风力发电机的风轮转动,也不是所有风速都能使风轮安全运行。
有效风速是指使风力发电机风轮安全转动的风速,有时也称可利用风速。
3.有效风速范围把风力发电机风轮能安全运转正常输出功率的风速段称作有效风速范围。
设计风力发电机时把起始风速、额定风速和停机风速之间的风速称作有效风速范围。
一般设计时常取3~20m/s(也有取6~20m/s)的风速范围为有效风速范围。
4.有效风速可利用的时间把一年内有效风速所占的时间称作有效风速可利用时间。
如东南沿海的泗礁岛年3~20m/s风速占7000h以上,有效风速时间即7000h以上。
5.起始风速(切入风速)与停机风速(切出风速)在低风速下,风力发电机组的风轮虽然可以转动,但由于发电机转子的转速很低,并不能有效地输出电能。
当风速上升到切入风速时,风力发电机组才开始发电。
随着风速的不断升高,发电机组输出功率不断增加,当风速上升到切出风速,风力发电机组输出功率超过额定功率时,在控制系统的作用下机组停止发电。
因此,切入风速为使风力发电机组开始发电的最小风速;切出风速为风力发电机组输出功率超过额定功率时的最小风速。
对于不同厂商生产的风电机组,其切入、切出风速不完全相同,切入风速与切出风速之间的风速段称为“工作风速”。
6.额定风速与额定输出功率风力发电机组产生额定输出功率时的最低风速,称为额定风速,它是由设计者为机组确定的一个参数。
在额定风速下,风力发电机组产生出的功率,称为额定输出功率。
7.最大输出功率与安全风速最大输出功率是风力发电机组运行在额定风速以上时,发电机组可以发出的最高功率值。
最大输出功率高,说明风力发电机组的发电机容量具有较大的安全系数。
安全风速是风力发电机组在保证安全的前提下,所能承受的最大风速。
安全风速高,说明该机组强度高,安全性好,一般不要求机组在安全风速下工作。