7 CANopen现场总线
CAN-bus现场总线基础教程【第6章】CAN总线应用层协议(CANopen)-CANopen主站设备的实现(26)

文库资料 ©2017 Guangzhou ZHIYUAN Electronics Stock Co., Ltd.第6章 CAN 总线应用层协议——CANopen1.1 CANopen 主站设备的实现上文介绍了CANopen 协议转换模块——XGate-COP10和基于该模块设计的I/O 设备,本章节中将介绍CANopen 网络中具有主站功能的设备如何开发。
尽管在CiA 组织的CANopen 规范中没有明确的定义主站设备和从站设备,但大家还是习惯把具有网络管理(NMT )能力的CANopen 设备称之为CANopen 主站设备。
除此之外CANopen 主站还应具有服务数据(SDO )客户端功能,这样CANopen 主站能够控制以及访问网络中的所有CANopen 从站。
PCI-5010-P 就是具有这些功能的CANopen 主站板卡(PCI 接口),下文将介绍如何基于该产品快速实现功能强大的CANopen 主站设备。
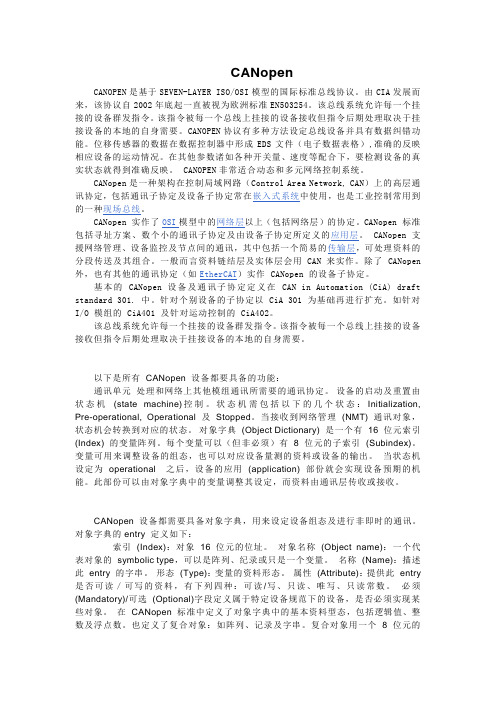
1.1.1 CANopen 网络的拓扑结构 一个CANopen 网络中的主站设备管理着其它的从站设备,而且一个网络只允许有一个CANopen 主站设备和最多127个从站设备存在。
图6.1所示为PCI-5010-P 在CANopen 网络中的典型应用形式。
1.1.2 PCI-5010-P CANopen 主站卡简介PCI-5010-P 系列工业级CAN 通信卡支持CANopen 主站协议,支持CiA 建议的标准波特率以及自定义波特率,并提供多个操作系统的设备驱动、工具软件等,能真正的满足客户的各种应用需求,为工业通信CANopen 网络提供了可靠性、高效率的解决方案,在计算机中的硬件与软件结构如图6.2所示。
图6.2 PCI-5010-P 在计算机中的硬件与软件结构PCI-5010-P 具有如下特性:用PCI 总线,兼容PCI 2.2规范;图6.1 PCI-5010-P 在CANopen 网络中的结构文库资料 ©2017 Guangzhou ZHIYUAN Electronics Stock Co., Ltd.● 支持CAN2.0A 协议; ● 支持CANopen 协议;● 符合ISO/DIS 11898-2 规范;● 集成1路电气完全隔离的CAN 通道; ● DC 2500V 电气隔离保护; ● 增强ESD/EMI 性能;● 遵守工业应用规范。
台达CANopen现场总线产品通讯整合应用实例
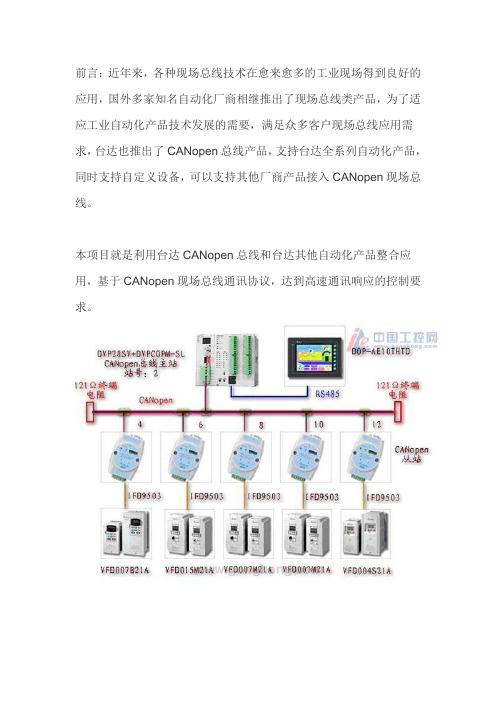
前言:近年来,各种现场总线技术在愈来愈多的工业现场得到良好的应用,国外多家知名自动化厂商相继推出了现场总线类产品,为了适应工业自动化产品技术发展的需要,满足众多客户现场总线应用需求,台达也推出了CANopen总线产品,支持台达全系列自动化产品,同时支持自定义设备,可以支持其他厂商产品接入CANopen现场总线。
本项目就是利用台达CANopen总线和台达其他自动化产品整合应用,基于CANopen现场总线通讯协议,达到高速通讯响应的控制要求。
控制系统技术方案配置:详见下表序号元件名称型号规格数量(台)备注1人机界面DOP-AE10THTD110.4”2PLC主机DVP28SV11R116K Step3CANopen主站DVPCOPM-SL1SV左侧高速扩展4CANopen从站IFD95035CANopen/Modbus5变频器VFD007B21A750W,单相220V6变频器VFD007M21A3750W,单相220V7变频器VFD004S21A1400W,单相220V上述表格仅列举出技术方案主要元器件,此外还包括121Ω终端电阻以及其他通讯连接电缆等辅助器件,此处均不予赘述。
控制系统原理框图简要介绍:采用CANopen现场总线作为通讯介质,主要为了实现多从站大量数据高速通信响应和提高通讯稳定性,和传统Modbus通讯协议比较,CANopen总线通讯协议有质的飞跃,数据通讯不再受到Modbus轮询方式的制约,大大提高了主从站之间的大量数据通讯响应速度和稳定性。
人机界面通过RS485和主站28SV PLC连接,28SV左侧高速并行接口连接CANopen总线主站模块DVPCOPM-SL,5台CANopen 总线从站模块IFD9503分别连接5台台达变频器,系统实现人机输入频率和启停命令,实时显示变频器输出频率、电流、电压等参数数值。
控制系统原理框图:人机界面画面如下:人机界面可以实现:分别设定5台变频器给定频率和启动、停止运转信号;可以分别显示5台变频器运行参数数据,包括输出频率、输出电流、输出电压等等。
CANopen现场总线设备通信协议测试系统
收稿日期:2007-10-30;修回日期:2007-12-11。
基金项目:上海市教委自然科学一般项目(05EZ37)。
作者简介:顾嫣(1985-),女,上海浦东人,硕士研究生,主要研究方向:现场总线、检测技术; 张凤登(1963-),男,山东青岛人,教授,主要研究方向:现场总线、检测技术、自动化装置; 刘荣鹏(1983-),男,山东辽城人,硕士研究生,主要研究方向:嵌入式系统、现场总线。
文章编号:1001-9081(2008)S1-0113-03CANopen 现场总线设备通信协议测试系统顾 嫣,张凤登,刘荣鹏(上海理工大学光学与电子信息工程学院,上海200093)(angel ayanyan @163.co m )摘 要:在分析CAN open 协议结构和特点的基础上,介绍了CANopen 现场总线设备通信协议测试系统,该系统是以解决CAN open 设备的协议一致性问题以及简化网络组态为目标而开发的。
通过该项设计使系统可以检测CAN open 设备的通信参数,并测试出CAN open 设备所应用的协议是否与标准的CAN open 协议一致。
另外,该系统也能对CAN open 设备进行默认参数配置或自定义参数配置,从而简化了网络组态,并为设备间的正常通信提供基础。
关键词:现场总线;CAN;CAN open ;SDO;对象字典中图分类号:T P273 文献标志码:ACo m mun icati on protocol testi ng system for CANopen fieldbus deviceGU Yan,Z HANG Feng -deng ,LIU Rong -peng(C oll ege of Optical&E lectronic Infor ma tion Eng i neering,Un i v e rsit y of Shangha i for Science and Technol ogy,Shanghai 200093,Ch i na )Abstract :T he struct ure and cha racte ristics of CAN open protoco l were ana l yzed and the co mmun ica ti on pro toco l testi ng syste m for CAN open fi e l dbus dev ice was i ntroduced ,whose goal was to so l v e t he confor m ance proble m of pro toco ls app lied by CAN open dev i ces as w e ll as t o si m plify net wo rk confi gura ti on .T he task of the desi gn w as to de tect the co mm un ica ti on para m eters o f CAN open dev ice w ith t he syste m and testw he t her the pro t o co ls appli ed by CAN open dev ices were consistentw ith CAN open spec ifi ca tion .In additi on ,the syste m could a lso be used to confi gure t he comm un i cation para m e ters o f CAN open dev ice accordi ng to the default para m eter tab le or ac t ua l para m eters ,so as to si m p lify net wo rk confi gurati on and prov ide the basis for no r ma l co mm un ica ti on bet w een dev ices .K ey words :fieldbus ;CAN;CAN open ;SDO;ob j ect d i c ti ona ry0 引言CAN (Contro ller A rea N et w ork)总线标准是在世界范围内较早出现,并且得到广泛使用的现场总线国际标准之一。
CANopen现场总线

7.2 CANopen通信模型
CANopen设备的功能及特性描述文件 • 电子数据文件EDS(Electronic Data
Sheet) • 设备配置文件DCF(Device Configuration
Files)
2.7C.A2NCopAenN的o通p信en模通式 信模型
(1)主/从模式
2.7C.A2NCopAenN的o通p信en模通式 信模型
(2)客户机/服务器模式
2.7C.A2NCopAenN的o通p信en模通式 信模型
(3)生产者/消费者模式
7.2 CANopen通信模型
3. CANopen的通信对象
(1)过程数据对象
• 过程数据对象用来传输实时数据,由一 个CAN报文构成,一般采用优先级较高 的CAN标识符。
7.2 CANopen通信模型
一7、.C2ACNAopNeno的p物e理n通层 信模型
1. 位定时
2.7网.2络拓CA扑N结构open通信模型
3.7连.2接器CANopen通信模型
二7、.C2ACNAopNeno的p数e据n通链路信层模型
• CANopen的数据链路层遵循CAN总线规范 ;
对7象.字2 典C的A结N构open通信模型
(71).2设C备A类N型o参p数en(通索引信1模000型H)
• 设备类型参数用来描述所使用的设备子协议, 例 如 I/O 设 备 的 设 备 类 型 参 数 为 401 (192H)。
• 使用索引6000H~9FFFH来描述详细的设备 子协议规范。
1. CANopen的设备模型
(71).2通C信A单N元open通信模型
CAN-bus现场总线基础教程【第6章】CAN总线应用层协议(CANopen)-CANopen主站设备及其应用(23)
文库资料 ©2017 Guangzhou ZHIYUAN Electronics Stock Co., Ltd.第6章 CAN 总线应用层协议——CANopen1.1 CANopen 主站设备及其应用由于可靠性、实时性、低成本、抗干扰性、兼容能力等多个方面的优势,CAN-bus 与其高层协议CANopen 已成为了车辆数据通信系统的事实标准,并普遍应用于所有的可移动设施,例如船舶舰艇、客车火车、升降电梯、重载车辆、工程机械、运动系统、分布式控制网络等。
几乎所有的通用 I/O 模块、驱动器、智能传感器、PLC 、MMI 设备的生产厂商都提供有支持CAN-bus 与CANopen 标准的产品。
只要符合 CANopen 协议标准及其设备协议子集标准的系统,就可以在功能和接口上保证各厂商设备的互用性和可交换性。
1.1.1 CANopen 网络特点作为标准化应用,CANopen 建立在设备对象描述的基础上,设备对象描述规定了基本的通信机制及相关参数。
CANopen 可通过总线对设备进行在线配置,与生产厂商无关联,支持网络设备的即插即用("Plug and Play")。
CANopen 支持2类基本数据传输机制:PDO 实现高实时性的过程数据交换,SDO 实现低实时性的对象字典条目的访问。
SDO 也用于传输配置参数,或长数据域的传输。
CANopen 既规定了各种设备之间的通信标准,也定义了与其他通信网络的互连规范。
1.1.2 CANopen 网络中的设备分类在说明CANopen 网络设备分类之前,我们有必要先了解其网络通信模型。
CAN-bus 支持 “生产者-消费者”通信模型,支持一个生产者和一个或多个消费者之间的通信关系。
生产者提供服务,消费者接收则可以(消费)或忽略服务。
需要注意,CANopen 标准作为CAN-bus 的应用层协议之一,除了支持上述服务类型外,还支持“客户端-服务器”通信模型。
CAN-bus现场总线基础教程【第6章】CAN总线应用层协议(CANopen)-CANopen协议简介(22)
文库资料 ©2017 Guangzhou ZHIYUAN Electronics Stock Co., Ltd.第6章 CAN 总线应用层协议——CANopen1.1 CANopen 协议CANopen 协议是在20世纪90年代末,由CiA 组织(CAN-in-Automation )在CAL (CAN Application Layer )的基础上发展而来,一经推出便在欧洲得到了广泛的认可与应用。
经过对CANopen 协议规范文本的多次修改,使得CANopen 协议的稳定性、实时性、抗干扰性都得到了进一步的提高。
并且CiA 在各个行业不断推出设备子协议,使CANopen 协议在各个行业得到更快的发展与推广。
目前CANopen 协议已经在运动控制、车辆工业、电机驱动、工程机械、船舶海运等行业得到广泛的应用。
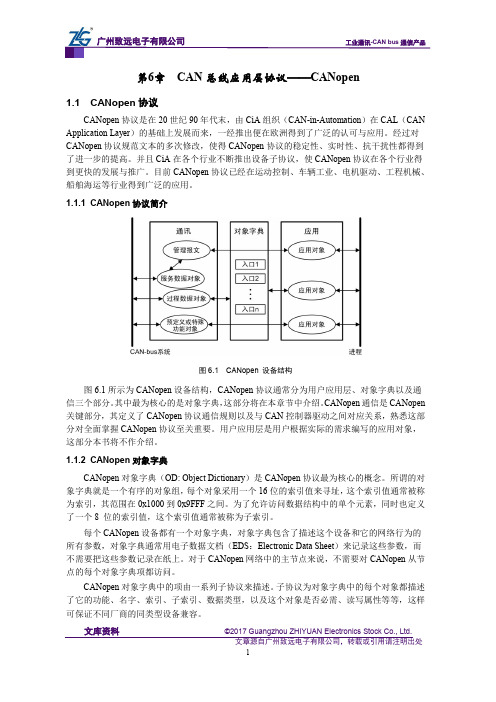
1.1.1 CANopen 协议简介图6.1 CANopen 设备结构图6.1所示为CANopen 设备结构,CANopen 协议通常分为用户应用层、对象字典以及通信三个部分。
其中最为核心的是对象字典,这部分将在本章节中介绍。
CANopen 通信是CANopen 关键部分,其定义了CANopen 协议通信规则以及与CAN 控制器驱动之间对应关系,熟悉这部分对全面掌握CANopen 协议至关重要。
用户应用层是用户根据实际的需求编写的应用对象,这部分本书将不作介绍。
1.1.2 CANopen 对象字典CANopen 对象字典(OD: Object Dictionary )是CANopen 协议最为核心的概念。
所谓的对象字典就是一个有序的对象组,每个对象采用一个16位的索引值来寻址,这个索引值通常被称为索引,其范围在0x1000到0x9FFF 之间。
为了允许访问数据结构中的单个元素,同时也定义了一个8 位的索引值,这个索引值通常被称为子索引。
每个CANopen 设备都有一个对象字典,对象字典包含了描述这个设备和它的网络行为的所有参数,对象字典通常用电子数据文档(EDS :Electronic Data Sheet )来记录这些参数,而不需要把这些参数记录在纸上。
CANopen协议应用指南

CANopen协议应用指南CANopen协议是一种用于控制与通信领域的通用现场总线协议。
它构建在CAN(控制器区域网络)总线上,提供了一种开放、高效、可靠和灵活的方式来组织和管理分布式系统。
本文将介绍CANopen协议的应用指南,主要包括网络结构、数据通信、设备配置和节点管理等方面。
首先,网络结构是CANopen协议应用的基础。
CANopen网络由一个或多个节点组成,节点之间通过CAN总线进行通信。
每个节点都有一个唯一的标识符,用于区分不同的节点。
网络结构可以是主-从结构,其中一个节点作为主节点,负责控制和管理其他从节点;也可以是对等结构,所有节点都可以互相通信和交互。
网络结构的选择取决于实际应用的需求。
其次,数据通信是CANopen协议的核心功能之一、CANopen提供了多种数据通信方式,包括广播通信、点对点通信和多点通信。
广播通信是将数据广播到整个网络中的所有节点;点对点通信是两个特定节点之间的直接通信;多点通信是将数据发送到一个或多个指定的节点。
CANopen还提供了一种灵活的通信参数设置机制,可以根据应用需求进行定制。
设备配置是CANopen协议应用中的重要环节。
每个CANopen设备都有一个设备描述文件(EDS),其中包含了设备的标识、功能和配置信息。
在设备配置过程中,需要根据实际应用需求修改和设置设备的各个参数,例如节点ID、通信速率、数据对象和服务对象等。
设备配置的目的是确保网络中的所有节点能够正确地进行通信和交互。
最后,节点管理是CANopen协议应用中的关键任务之一、节点管理包括节点的启动、停止、心跳检测、重启以及节点状态的监控和管理等。
CANopen协议提供了一系列的节点管理服务,如NMT(网络管理)服务、SDO(服务数据对象)服务和EMCY(紧急)服务等。
通过节点管理,用户可以对网络中的节点进行灵活的控制和管理。
总结而言,CANopen协议是一种强大的通信协议,可以广泛应用于控制与通信领域。
CANopen
CANopenCANOPEN是基于SEVEN-LAYER ISO/OSI模型的国际标准总线协议。
由CIA发展而来,该协议自2002年底起一直被视为欧洲标准EN503254。
该总线系统允许每一个挂接的设备群发指令。
该指令被每一个总线上挂接的设备接收但指令后期处理取决于挂接设备的本地的自身需要。
CANOPEN协议有多种方法设定总线设备并具有数据纠错功能。
位移传感器的数据在数据控制器中形成EDS文件(电子数据表格),准确的反映相应设备的运动情况。
在其他参数诸如各种开关量、速度等配合下,要检测设备的真实状态就得到准确反映。
CANOPEN非常适合动态和多元网络控制系统。
CANopen是一种架构在控制局域网路(Control Area Network, CAN)上的高层通讯协定,包括通讯子协定及设备子协定常在嵌入式系统中使用,也是工业控制常用到的一种现场总线。
CANopen 实作了OSI模型中的网络层以上(包括网络层)的协定。
CANopen 标准包括寻址方案、数个小的通讯子协定及由设备子协定所定义的应用层。
CANopen 支援网络管理、设备监控及节点间的通讯,其中包括一个简易的传输层,可处理资料的分段传送及其组合。
一般而言资料链结层及实体层会用CAN来实作。
除了 CANopen 外,也有其他的通讯协定(如EtherCAT)实作 CANopen 的设备子协定。
基本的CANopen 设备及通讯子协定定义在CAN in Automation (CiA) draft standard 301. 中。
针对个别设备的子协定以 CiA 301 为基础再进行扩充。
如针对I/O 模组的 CiA401 及针对运动控制的 CiA402。
该总线系统允许每一个挂接的设备群发指令。
该指令被每一个总线上挂接的设备接收但指令后期处理取决于挂接设备的本地的自身需要。
以下是所有CANopen 设备都要具备的功能:通讯单元处理和网络上其他模组通讯所需要的通讯协定。
can总线与canopen协议
竭诚为您提供优质文档/双击可除can总线与canopen协议篇一:•canopen协议讲解根据ds301的内容进行介绍1、can总线can标准报文2、canopen应用层协议canopen协议不针对某种特别的应用对象,具有较高的配置灵活性,高数据传输能力,较低的实现复杂度。
同时,canopen完全基于can标准报文格式,而无需扩展报文的支持,最多支持127个节点,并且协议开源。
一个标准的canopen节点(下图),在数据链路层之上,添加了应用层。
该应用层一般由软件实现,和控制算法共同运行在实时处理单元内。
一个标准的canopen节点canopen应用层协议细化了can总线协议中关于标识符的定义。
定义标准报文的11比特标识符中高4比特为功能码,后7比特为节点号,重命名为通讯对象标识符(cob-id)。
功能码将所有的报文分为7个优先级,按照优先级从高至低依次为:网络命令报文(nmt)同步报文(sync)紧急报文(emeRgency)时间戳(time)过程数据对象(pdo)服务数据对象(sdo)节点状态报文(nmterrcontrol)7位的节点号则表明canopen网络最多可支持127个节点共存(0号节点为主站)。
下表给出了各报文的cob-id范围。
nmt命令为最高优先级报文,由canopen主站发出,用以更改从节点的运行状态。
sync报文定期由canopen主站发出,所有的同步pdo根据sync报文发送。
emeRgency报文由出现紧急状态的从节点发出,任何具备紧急事件监控与处理能力的节点会接收并处理紧急报文。
time报文由canopen主站发出,用于同步所有从站的内部时钟。
pdo分为4对发送和接收pdo,每一个节点默认拥有4对发送pdo和接收pdo,用于过程数据的传递。
sdo分为发送sdo和接收sdo,用于读写对象字典。
mterrorcontrol报文由从节点发出,用以监测从节点的运行状态。
状态机canopen的每一个节点都维护了一个状态机。
CANopen协议在现场总线网络中的应用
CANopen协议在现场总线网络中的应用作者:贾佳来源:《现代电子技术》2008年第15期摘要:CANopen是一个开放的、标准化的应用层协议, 在各种控制系统中得到了广泛的应用,可以进一步提高系统的可靠性、灵活性和兼容性。
结合工业控制中的自调匀整系统,采用CANopen协议实现了CAN总线上下位机之间的通信,并通过测试证明各通信模块具有较强的在线可控性,保证系统工作稳定可靠。
关键词:CANopen协议;CAN总线;DSP;对象字典中图分类号:TP273 文献标识码:B 文章编号:1004373X(2008)1517803Application of CANopen Protocol in Fieldbus NetworkJIA Jia(Xi′an Aeronautical Polytechnic Institute,Xi′an,710089,China)Abstract:CANopen is a sort of exoteric and standard application layer protocol, the use of it enhances the reliability,agility and compatibility in all kinds of control system.This paper decribes its communication between machines by associating with the autolevel control system.The on-line controllable is verified by testing experiment between communications modules,the reliable and stabilization of the whole system are ensured.Keywords:CANopen protocol;CAN bus;DSP;object dictionary1 引言基于现场总线的网络技术研究是自动控制领域发展的一个热点。
CAN和CANopen简介
一、和简介CAN总线全称为Controller Area Network即控制器局域网是国际上应用最广泛的现场总线之一,已经在汽车制造、机械制造、包装机械、烟草等行业得到了广泛的应用。
CAN总线是德国BOSCH公司从80年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维。
通信速率可达1MBPS。
CAN总线通信接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作。
CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码。
采用这种方法的优点可使网络内的节点个数在理论上不受限制,数据块的标识码可由11位或29位二进制数组成,因此可以定义211或229个不同的数据块,这种按数据块编码的方式,还可使不同的节点同时接收到相同的数据,这一点在分布式控制系统中非常有用。
数据段长度最多为8个字节,可满足通常工业领域中控制命令、工作状态及测试数据的一般要求。
同时,8个字节不会占用总线时间过长,从而保证了通信的实时性。
CAN协议采用CRC检验并可提供相应的错误处理功能,保证了数据通信的可靠性。
CAN卓越的特性、极高的可靠性和独特的设计,特别适合工业过程监控设备的互连,因此,越来越受到工业界的重视,并已公认为最有前途的现场总线之一。
另外,CAN总线采用了多主竞争式总线结构,具有多主站运行和分散仲裁的串行总线以及广播通信的特点。
CAN总线上任意节点可在任意时刻主动地向网络上其它节点发送信息而不分主次,因此可在各节点之间实现自由通信。
CAN总线协议已被国际标准化组织认证,技术比较成熟,控制的芯片已经商品化,性价比高,特别适用于分布式测控系统之间的数通讯。
CAN总线插卡可以任意插在PC、AT、XT兼容机上,方便地构成分布式监控系统。
现场总线有哪几种-现场总线优缺点
现场总线有哪几种?现场总线优缺点常见的现场总线有:PROFIBUS、EtherCA T、Lightbus、Interbus、CANopen、ControlNet、SERCOS interface、Ethernet、PROFINET、USB、Modbus、RS232/RS485、CC-Link、AS-Interface、LON、EIB、SNMP、QOS、CAN、MECHATROLINK。
总线优点:现场总线使自控设备与系统步入了信息网络的行列,为其应用开拓了更为广阔的领域;一对双绞线上可挂接多个控制设备,便于节省安装费用;节省维护开销;提高了系统的可靠性;为用户提供了更为灵活的系统集成主动权。
总线缺点:网络通信中数据包的传输延迟,通信系统的瞬时错误和数据包丢失,发送与到达次序的不一致等都会破坏传统控制系统原本具有的确定性,使得控制系统的分析与综合变得更复杂,使控制系统的性能受到负面影响。
总线本质不同的机构和不同的人可能对现场总线有着不同的定义,不过通常情况下,大家公认在以下六个方面:1、通信网络用于过程自动化和制造自动化的现场设备或现场仪表互连的现场通信网络。
2、设备互联依据实际需要使用不同的传输介质把不同的现场设备或者现场仪表相互关联。
3、互操作性用户可以根据自身的需求选择不同厂家或不同型号的产品构成所需的控制回路,从而可以自由地集成FCS。
4、分散功能块FCS废弃了DCS的输入/输出单元和控制站,把DCS控制站的功能块分散地分配给现场仪表,从而构成虚拟控制站,彻底地实现了分散控制。
5、通信线供电通信线供电方式允许现场仪表直接从通信线上摄取能量,这种方式提供用于本质安全环境的低功耗现场仪表,与其配套的还有安全栅。
6、开放式互联网现场总线为开放式互联网络,既可以与同层网络互联,也可与不同层网络互联,还可以实现网络数据库的共享。
CANopen在ISO层级中的位置
CANopen在ISO层级中的位置
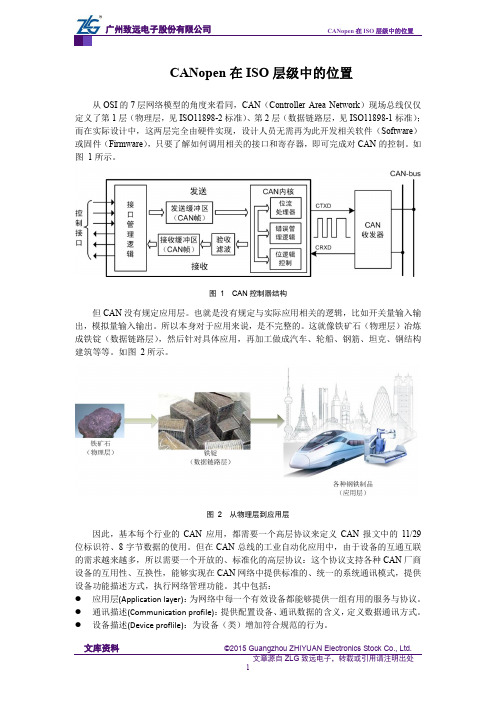
从OSI的7层网络模型的角度来看同,CAN(Controller Area Network)现场总线仅仅定义了第1层(物理层,见ISO11898-2标准)、第2层(数据链路层,见ISO11898-1标准);而在实际设计中,这两层完全由硬件实现,设计人员无需再为此开发相关软件(Software)或固件(Firmware),只要了解如何调用相关的接口和寄存器,即可完成对CAN的控制。
如图1所示。
图 1 CAN控制器结构
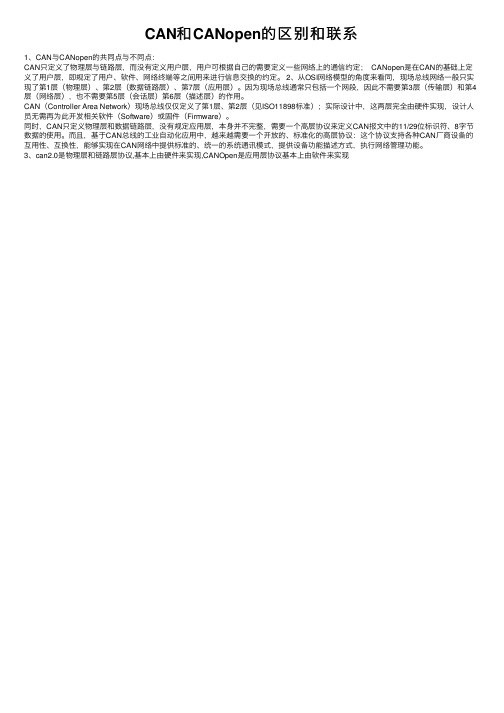
但CAN没有规定应用层。
也就是没有规定与实际应用相关的逻辑,比如开关量输入输出,模拟量输入输出。
所以本身对于应用来说,是不完整的。
这就像铁矿石(物理层)冶炼成铁锭(数据链路层),然后针对具体应用,再加工做成汽车、轮船、钢筋、坦克、钢结构建筑等等。
如图2所示。
图 2 从物理层到应用层
因此,基本每个行业的CAN应用,都需要一个高层协议来定义CAN报文中的11/29位标识符、8字节数据的使用。
但在CAN总线的工业自动化应用中,由于设备的互通互联的需求越来越多,所以需要一个开放的、标准化的高层协议:这个协议支持各种CAN厂商设备的互用性、互换性,能够实现在CAN网络中提供标准的、统一的系统通讯模式,提供设备功能描述方式,执行网络管理功能。
其中包括:
●应用层(Application layer):为网络中每一个有效设备都能够提供一组有用的服务与协议。
●通讯描述(Communication profile):提供配置设备、通讯数据的含义,定义数据通讯方式。
●设备描述(Device proflile):为设备(类)增加符合规范的行为。
CAN现场总线介绍

与以太网不同当多个数据帧同时在网络上
传输时采用非破坏 性位序列仲裁,最高优
先级的报文获得总线访问权
位序列仲裁
CAN报文的优先级由标识符值决定
报文的标识符的数值在系统设计的初始阶段分配
不同节点不允许发送相同ID报文(远程帧除外)
标识符数值越小,优先级越高。总线冲突通过非
破坏性位序列仲裁解决。位仲裁采用“线与”机
通信协议。
是交通运载工具电气系统中应用较广的总线。
现在向过程工业,机械工业,机器人,数控机床,传感器
等方面发展。
1993 年11 月, ISO 正式颁布CAN 为国际标准ISO11898。
支持CAN协议的公司有Intel 、Motorola 、Philips 、
Siemens、NEC、Honeywell等公司。
CAN与EMI
CAN对于电磁干扰(EMI)不敏感
标准化规定
高速CAN与低速CAN的电平信号
高速CAN与低速CAN网络拓扑
ISO 11898
ISO 11898-1
ISO 11898-2
低速CAN物理层标准
ISO 11898-4
高速CAN物理层标准
ISO 11898-3
CAN总线数据链路层标准
设备规范为设备增加了设备相关的类行为
CAL(CAN Application Layer)
CAL(CAN Application Layer)协议是目前
基于CAN的高层通讯协议中的一种,提供
了4种应用层服务功能
CMS (CAN-based Message Specification)
CAN和CANopen的区别和联系
CAN和CANopen的区别和联系
1、CAN与CANopen的共同点与不同点:
CAN只定义了物理层与链路层,⽽没有定义⽤户层,⽤户可根据⾃⼰的需要定义⼀些⽹络上的通信约定; CANopen是在CAN的基础上定义了⽤户层,即规定了⽤户、软件、⽹络终端等之间⽤来进⾏信息交换的约定。
2、从OSI⽹络模型的⾓度来看同,现场总线⽹络⼀般只实现了第1层(物理层)、第2层(数据链路层)、第7层(应⽤层)。
因为现场总线通常只包括⼀个⽹段,因此不需要第3层(传输层)和第4层(⽹络层),也不需要第5层(会话层)第6层(描述层)的作⽤。
CAN(Controller Area Network)现场总线仅仅定义了第1层、第2层(见ISO11898标准);实际设计中,这两层完全由硬件实现,设计⼈员⽆需再为此开发相关软件(Software)或固件(Firmware)。
同时,CAN只定义物理层和数据链路层,没有规定应⽤层,本⾝并不完整,需要⼀个⾼层协议来定义CAN报⽂中的11/29位标识符、8字节数据的使⽤。
⽽且,基于CAN总线的⼯业⾃动化应⽤中,越来越需要⼀个开放的、标准化的⾼层协议:这个协议⽀持各种CAN⼚商设备的互⽤性、互换性,能够实现在CAN⽹络中提供标准的、统⼀的系统通讯模式,提供设备功能描述⽅式,执⾏⽹络管理功能。
3、can2.0是物理层和链路层协议,基本上由硬件来实现,CANOpen是应⽤层协议基本上由软件来实现。
CANopen现场总线通讯协议的分析
CANopen现场总线通讯协议的分析摘要:CANopen使用基于对象的方法来定义标准设备,每个设备都表现为一组对象的集合,能够被网络所访问。
对象字典是通讯程序和上层应用程序之间的接口。
CANopen 的核心概念是设备对象字典(Object Dictionary,OD),它是一个有序的对象组,每个对象采用一个16 位的索引值来寻址,为了允许访问数据结构中的单个元素,同时定义了一个8 位的子索引。
CANopen 网络中每个节点都有一个对象字典。
对象字典包含了描述这个设备和它的网络行为的所有参数。
一个节点的对象字典是在电子数据文件(Electronic Data Sheet,EDS)中描述。
关键词:CANopen;对象词典;索引;子索引前言:CAN(Controller Area Network)现场总线仅仅定义了物理层、数据链路层(见ISO11898 标准),没有规定应用层;实际设计中,物理层、数据链路层完全由硬件实现。
所以CAN 现场总线本身并不完整,需要一个高层协议来定义CAN 信息中的11/29 位标识符、8 字节数据的使用。
CANopen 协议是一种基于CAN 的高层协议,它是由 CiA(CAN-in-Automation)定义并维护的协议之一,它是在CAL(CAN Application Layer)协议基础上开发的,使用了CAL 通信和服务协议子集。
1 CANopen 通讯对象1.1 PDO(Process Data Object:过程数据对象)PDO提供设备应用对象的直接访问通道,用来传输实时数据,具有较高的优先权。
PDO CAN信息数据列中每个字节都用作数据传输,信息利用率高。
PDO通过“生产者/消费者”模式来描述,数据从一个生产者传到一个或者多个消费者,数据传送限制在1~8个字节。
生产者传输数据后,不需要消费者确认,网络上的每个节点都会检测发送节点发出的数据信息,然后节点会决定接收到的信息是否需要处理。
ID200canOPEN设置简易说明接线CAN现场总线接线如2所
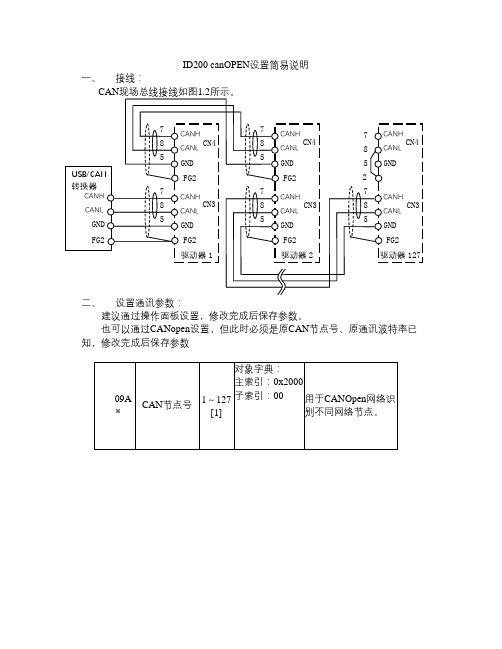
ID200 canOPEN设置简易说明一、接线:二、设置通讯参数:建议通过操作面板设置,修改完成后保存参数。
也可以通过CANopen设置,但此时必须是原CAN节点号、原通讯波特率已知,修改完成后保存参数09A ※CAN节点号1~127[1]对象字典:主索引:0x2000子索引:00 用于CANOpen网络识别不同网络节点。
USB/CAN 转换器CANH CANL GNDCANHCANL785GNDCN3驱动器1FG2CANHCANL785GNDFG2CN4785CN3驱动器2785CN4CANHCANLGNDFG2CANHCANLGNDFG2785驱动器1277852CN3CN4CANHCANLGNDFG2CANHCANLGNDFG21、※表示该参数需保存重新上电后生效(SDO :23 10 10 01 73 61 76 65 )。
2、[]中的数字表示出厂时的设置。
3、0号节点地址是广播地址,每个设备会接收广播指令但不会产生应答。
三、 初始化配置及参数设置:CANOPEN 初始化配置、设置参数、读取状态都是通过NMT 及SDO 报文来实现的。
1、NMT 报文最常见的NMT 报文是启停节点报文 报文 ID :0x000地址 报文内容:01 XX报文说明:启动1号节点,01是启动命令(其它命令见下表)。
XX 是驱动器节点号 16进制字节数。
2、SDO 报文节点的配置过程需要SDO报文传送来实现,SDO报文首个命令字节包含读、写、对象数据类型等信息:1、写单字节数据:命令主索引子索引单字节8bit例:设置运行模式2f 60 60 00 01 (位置轮廓)2、写单字数据:命令主索引子索引单字16bit例:设置控制字2b 40 60 00 1f 00(绝对式、非即时)3、写双字数据:命令主索引子索引双字32bit例:设置位置轮廓速度23 81 60 00 00 08 00 00(0x00000800)4、读数据:命令主索引子索引40 41 60 00读统一使用0x40命令,对象数据类型包含在主索引+子索引中,被读节点会根据数据对象的数据类型(索引值决定)和对应数值返回对应的数据信息。
CANopen和CAN的概念

第一部分CAN和CANopen的概念一、CAN和CANopen简介CAN总线全称为Controller Area Network即控制器局域网是国际上应用最广泛的现场总线之一,已经在汽车制造、机械制造、包装机械、烟草等行业得到了广泛的应用。
CAN总线是德国BOSCH公司从80年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维。
通信速率可达1MBPS。
CAN总线通信接口中集成了CAN 协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作。
CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码。
采用这种方法的优点可使网络内的节点个数在理论上不受限制,数据块的标识码可由11位或29位二进制数组成,因此可以定义211或229个不同的数据块,这种按数据块编码的方式,还可使不同的节点同时接收到相同的数据,这一点在分布式控制系统中非常有用。
数据段长度最多为8个字节,可满足通常工业领域中控制命令、工作状态及测试数据的一般要求。
同时,8个字节不会占用总线时间过长,从而保证了通信的实时性。
CAN协议采用CRC检验并可提供相应的错误处理功能,保证了数据通信的可靠性。
CAN卓越的特性、极高的可靠性和独特的设计,特别适合工业过程监控设备的互连,因此,越来越受到工业界的重视,并已公认为最有前途的现场总线之一。
另外,CAN总线采用了多主竞争式总线结构,具有多主站运行和分散仲裁的串行总线以及广播通信的特点。
CAN总线上任意节点可在任意时刻主动地向网络上其它节点发送信息而不分主次,因此可在各节点之间实现自由通信。
CAN总线协议已被国际标准化组织认证,技术比较成熟,控制的芯片已经商品化,性价比高,特别适用于分布式测控系统之间的数通讯。
CAN总线插卡可以任意插在PC、AT、XT兼容机上,方便地构成分布式监控系统。
CANopen 现场总线应用层协议主站的开发与实现
工学硕士学位论文CANopen现场总线应用层协议 主站的开发与实现宋 威北京工业大学2008年5月分类号:TP336单位代码:10005学号: S200502115密级:公开北京工业大学硕士学位论文题目 CANOPEN现场总线应用层协议主站的开发与实现英文并列题目THE DESIGN AND IMPLEMENTATION OF A MASTER OF THE APPLICATION LAYER FOR CANOPEN研究生姓名:宋威专业:检测技术与自动化装置研究方向:现场总线技术与嵌入式系统应用导师姓名:方穗明职称:副教授论文报告提交日期 2008年5月学位授予日期授予单位名称和地址北京工业大学北京市朝阳区平乐园 100 号独 创 性 声 明本人声明所呈交的论文是我个人在导师指导下进行的研究工作及取得的研究成果。
尽我所知,除了文中特别加以标注和致谢的地方外,论文中不包含其它人已经发表或撰写过的研究成果,也不包含为获得北京工业大学或其它教育机构的学位或证书而使用过的材料。
与我一同工作的同志对本研究所做的任何贡献均已在论文中作了明确的说明并表示了谢意。
签名:日期:关于论文使用授权的说明本人完全了解北京工业大学有关保留、使用学位论文的规定,即:学校有权保留送交论文的复印件,允许论文被查阅和借阅;学校可以公布论文的全部或部分内容,可以采用影印、缩印或其它复制手段保存论文。
(保密的论文在解密后应遵守此规定)签名:导师签名:日期:摘要摘 要汽车内部电子控制器件的不断增加使网络化的汽车整体控制成为当前汽车电子产业的主要发展方向之一。
CAN(Controller Area Network)总线由于其低成本、高可靠性、高抗干扰能力和高实时性等特点,成为汽车内部控制网络的主要载体。
作为CAN总线的应用层协议之一,CANopen具有高度的灵活性和可配置性,成为电动汽车和混合动力汽车控制网络的首选协议。
根据汽车系统的高实时性要求、多样的控制环境和CANopen协议本身的特点,建立CANopen网络的首要任务是建立一个实时运行、并行处理、灵活配置和可移植的CANopen主站。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7.2 CANopen通信模型
2)设备监控 ❖ 节点/寿命保护机制 ❖ 节点保护是NMT主机通过远程帧周期性地监视
从机的状态。 ❖ 寿命保护是通过收到的用于监视从机的远程帧来
7.2 CANopen通信模型
3)紧急报文 ❖ 当设备出现错误时,标准化机制就会发送一个紧
急报文 。 ❖ 避免持续发送紧急报文,设置禁止发送紧急报文
时间(索引1015H)。 ❖ 紧急报文COB标识符参数(索引1014H)的默认
值为“80H+节点ID” 。 ❖ 紧急报文的格式
7.2 CANopen通信模型
最多划分成8个子协议。
7.2 CANopen通信模型
(2)设备属性参数 ❖ 设备属性参数主要包括描制造商设备名称(索引
1008H)、软件版本(索引1009H)、硬件版本 (索引100AH)和标识对象(索引1018H)等。 ❖ 制造商设备名称、软件版本和硬件版本是字符串 型对象,用户可以读取索引中的信息。 ❖ 标识对象属于一种结构,包含4个数据类型为 Unsigned32的条目 。
5)PDO映射参数 ❖ 用于描述PDO传输对象字典中的哪些参数; ❖ RPDO映射参数的索引范围为1600H~17FFH; ❖ TPDO映射参数的索引范围为1A00H~1BFFH; ❖ 最多包含64个指向传输过程数据的指针;
7.2 CANopen通信模型
7.2 CANopen通信模型
7.2 CANopen通信模型
7.1 CANopen概述
(6)可使用多种线缆和连接器; (7)数据通信可采用事件驱动、远程请求、同 步传输等多种方式; (8)采用心跳报文、节点保护、寿命保护等多 种设备监控方式,有利于节点之间的可靠通信; (9)提供典型的预定义主/从连接组,最多可支 持127个节点; (10)提供很大的灵活性,应用非常广泛。
❖ CANopen对设备进行详细定义实现互换性。 ❖ CANopen协议是由CiA(CAN in Automation)
组织定义并维护的协议之一。 ❖ 灵活、简单。
7.1 CANopen概述
一、CANopen的历史 CAL(CAN Application Layer)协议由
CiA协会负责管理、发展和推广。CAL提供了4 种应用层服务功能: 1. CMS (CAN-based Message Specification) 2. NMT (Network ManagemenT) 3. DBT (DistriBuTor) 4. LMT (Layer ManagemenT)
7.2 CANopen通信模型
CANopen设备的功能及特性描述文件 ❖ 电子数据文件EDS(Electronic Data Sheet) ❖ 设备配置文件DCF(Device Configuration Files)
7.2 CANopen通信模型
2. CANopen的通信模式 (1)主/从模式
结构, 特殊要求可配置备用NMT主机。
7.2 CANopen通信模型
1)NMT服务
7.2 CANopen通信模型
❖ NMT从机Boot up服务
7.2 CANopen通信模型
❖ NMT主机命令
7.2 CANopen通信模型
2)设备监控 ❖ 心跳报文 ❖ 心跳报文是一种周期性地发送给一个或多个设备
7.3 台达CANopen设备简介
2. DVPCOPM-SL模块外观及功能介绍
7.3 台达CANopen设备简介
3. COPM-SL模块与SV 主机的数据对应关系
7.3 台达CANopen设备简介
二、台达CANopen从站通信转换模块 1. IFD9503 模块特点 (1)支持CANopen CiA301 V4.02协议; (2)支持预定义的主从连接中SDO 、PDO、 NMT、同步和紧急报文服务; (3)在 CANopen 网络配置工具中支持 EDS 文 件配置; (4)支持10kbit/s、20 kbit/s、50 kbit/s、125 kbit/s、250 kbit/s、500 kbit/s、800 kbit/s、 1Mbit/s多种通信速率。
7.2 CANopen通信模型
对象字典的结构
7.2 CANopen通信模型
(1)设备类型参数(索引1000H) ❖ 设备类型参数用来描述所使用的设备子协议,例
如I/O设备的设备类型参数为401(192H)。 ❖ 使用索引6000H~9FFFH来描述详细的设备子协
议规范。 ❖ 设备中包含多个逻辑设备时,可以把设备子协议
故障界定方法,并在应用层中采用心跳报文、节 点保护、寿命保护等多种设备监控方式进一步保 障系统的可靠性。
7.2 CANopen通信模型
三、CANopen的应用层 1. CANopen的设备模型
7.2 CANopen通信模型
(1)通信单元 ❖ 通信单元由CAN收发器、CAN控制器以及
CANopen协议栈组成。 ❖ 协议栈中包括实现通信的通信对象(如过程数据
间接检测NMT主机的状态。 ❖ “保护时间”参数(索引100CH) ❖ “寿命因子”参数(索引100DH)
7.3 台达CANopen设备简介
一、台达CANopen扫描模块 1. DVPCOPM-SL模块特点 (1)符合 CANopen 标准协议CiA301v4.02; (2)支持NMT 主机服务; (3)错误控制:支持心跳和节点保护报文; (4)PDO 传输类型:事件触发、时间触发、同 步周期和同步非周期: (5)支持标准 SDO 加速传输模式。
(2)服务数据对象 ❖ 可以通过服务数据对象(SDO)来访问对象字
典中的条目。 ❖ 被访问的设备必须具有一个SDO服务器。 ❖ SDO之间的数据交换至少需要两个CAN报文才
能实现。
7.2 CANopen通信模型
1)加速SDO传输 ❖ 传输数据不超过4字节,数据不分段。
7.2 CANopen通信模型
7.2 CANopen通信模型
2. CANopen的通信模式 (2)客户机/服务器模式
7.2 CANopen通信模型
2. CANopen的通信模式 (3)生产者/消费者模式
7.2 CANopen通信模型
3. CANopen的通信对象 (1)过程数据对象 ❖ 过程数据对象用来传输实时数据,由一个CAN 报文构成,一般采用优先级较高的CAN标识符。 ❖ 在CANopen中过程数据被分为几个单独的段, 每个段最多为8个字节,这些段就是过程数据对 象(PDO)。
(3)预定义对象 1)同步报文 ❖ 在通过网络进行通信的应用中,发送和接收之间 必须相互协调和同步。 ❖ 同步报文COB标识符参数(索引1005H)
7.2 CANopen通信模型
❖ 同步报文采用不含数据字节或只含有一个数据字 节的CAN报文。
❖ 数据字节中包含一个从1开始递增技术的同步计 数器。
❖ 进行同步通信的系统多数都由一个同步生产者和 1~126个同步消费者构成。
2)分段SDO传输 ❖ 传输数据超过4字节,数据分段。
7.2 CANopen通信模型
3)块传输 ❖ 提高数据块的传输效率。
7.2 CANopen通信模型
4)SDO服务器和客户机的参数
7.2 CANopen通信模型
5)SDO报文格式
7.2 CANopen通信模型
5)SDO报文格式
7.2 CANopen通信模型
7.2 CANopen通信模型
7.2 CANopen通信模型
一、CANopen的物理层 1. 位定时
7.2 CANopen通信模型
2. 网络拓扑结构
7.2 CANopen通信模型
3. 连接器
7.2 CANopen通信模型
二、CANopen的数据链路层 ❖ CANopen的数据链路层遵循CAN总线规范 ; ❖ CANopen使用数据帧,也可以使用远程帧 ; ❖ CANopen使用标准帧,也可以使用扩展帧; ❖ CANopen规范中采用了CAN总线的错误检测与
7.2 CANopen通信模型
1)PDO通信参数
7.2 CANopen通信模型
2)PDO的CAN,主
要用来确定PDO的CAN标识符 ; ❖ PDO的COB-ID有32位,低29位为CAN标识符区,
支持11位和29位两种CAN标识符 ;
7.2 CANopen通信模型
输出接口; ❖ 在驱动控制系统中,可以实现轨迹发生器或速度
控制模块的控制。
7.2 CANopen通信模型
(3)对象字典 ❖ 在对象字典中,CANopen设备的所有对象都以
标准化方式进行描述的。 ❖ 对象字典利用对象来描述CANopen设备的全部
功能,并且它也是通信单元与应用单元之间的接 口,应用单元和通信单元都可以访问对象字典。 ❖ 对象字典中的对象可以通过一个16位索引来识别, 对象可以是变量、数组或结构,数组和结构的单 元又可以通过8位子索引进行访问。
7.1 CANopen概述
CAL报文标志符的分配
7.1 CANopen概述
CANopen标识符分配
7.1 CANopen概述
CANopen协议的发展历史
7.1 CANopen概述
二、CANopen的特性 (1)介质访问控制及物理信号使用CAN总线技 术; (2)通信速率可以有多种选择; (3)采用对象字典作为通信接口与应用程序的 接口; (4)支持主/从、生产者/消费者和客户机/服务 器等多种通信模式; (5)制定了多种设备子协议;
7.3 台达CANopen设备简介
2. IFD9503模块外观及功能介绍
7.3 台达CANopen设备简介
3)PDO链路 ❖ CANopen协议预定义连接的标识符分配方案; ❖ 采用预定义连接进行主从通信 ;