kuka机器人常见问题及解决方案
机器人设备常见故障排除的十个技巧

机器人设备常见故障排除的十个技巧机器人设备在现代工业生产中扮演着越来越重要的角色,但是在实际运行中难免会遇到各种各样的故障问题。
为了有效提高机器人设备的运行效率和延长使用寿命,掌握一些常见故障的排除技巧显得尤为重要。
在本文中,将分享机器人设备常见故障排除的十个技巧,帮助你快速解决故障问题,保障生产运行的正常进行。
1. 检查电源供应首先要确保机器人设备的电源供应是正常的,检查开关是否打开,插头是否松动,电缆是否断裂等。
有时候故障可能只是来自于电源供应的问题,及时排查可以避免不必要的麻烦。
2. 检查传感器传感器是机器人设备中的关键部件,负责感知周围环境并传达给控制系统。
当机器人出现异常运行时,需要检查传感器是否工作异常,清理传感器周围的灰尘或杂物,确保其正常运行。
3. 检查连接线路机器人设备通常有众多的线路连接,要经常检查连接线路是否松动或损坏,特别是在机器运行中频繁移动的地方。
及时修复线路问题可以有效减少故障发生的可能性。
4. 重启设备有时候机器人设备出现故障可能只是暂时性的问题,通过简单地重启设备可以解决一些无法在系统中找到原因的故障。
重启设备前记得保存好所有的数据,避免造成数据丢失。
5. 清洁设备机器人设备长时间运行后会积累大量的灰尘和杂物,影响设备的正常运行。
定期清洁设备表面和内部部件,特别是机器人关节和传感器等部位,可以有效预防故障的发生。
6. 更新软件机器人设备的软件系统也需要定期更新,以修复已知的BUG和优化系统性能。
确保软件是最新版本,可以提高设备的稳定性和可靠性,减少故障的发生。
7. 检查润滑部件机器人设备的关节和传动部件通常需要定期润滑以减少磨损和摩擦,确保设备的顺畅运行。
检查润滑部件的润滑油是否充足,是否已过期,及时更换和添加润滑油可以延长设备的使用寿命。
8. 校准设备有些机器人设备在长时间运行后可能需要进行重新校准以确保精准度和准确性。
定期校准设备可以避免设备运行的偏差和误差,提高设备的工作效率。
kuka机器人常见问题及解决方案

Kuka机器人常见问题及解决方案1 开机坐标系无效世界坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在世界坐标系中移动,枪头也随着改变方向,那就是我们在开机后没有选择工具。
解决方案:配置→当前工具/基坐标→工具号→12 专家登陆一般情况,开机后我们要编辑程序时,首先我们要登陆专家级别,有助于我们操作。
解救方案:配置→用户组→专家→登陆→密码kuka→登陆3 设置END新建程序我们发现没有终点,我们要设置终点。
解决方案:配置→杂项→编辑器→定一行DEF4 程序第一条设置为home位置编辑程序时,第一条指令要设为home位置,这时我们在最后可以直接找到home位置的标准,可以节省手动移动机器人的操作时间。
5 手动关闭输出信号当我们在测试程序或者正常使用时(已经打开了输出信号),有时候会遇到突发情况,比如说程序路径有撞车危险,或者预热失败,程序错误等等,这时候我们要手动关闭输出信号。
在问题解决完毕后我们可以再次用kcp打开输出信号。
(其中我们的输出信号是3是低压氧,4是高压氧,5是丙烷)解决方案:显示→输入/输出端→数字输出端→按住驱动→数(关闭或者打开)6 6D鼠标失效系统指示6D鼠标仍然有电压之类的提示,鼠标失效了,我们这时可以松开驱动,从新按下去等待驱动指示I 变为绿色即可。
7 从电脑中拷贝程序电脑中拷贝程序,以便C盘中程序丢失后,我们可以从D盘或者外部移动U盘中拷贝使用。
解决方案:专家登陆后→按Num(此时显示器上Num为灰色,在按一下转换回来)→CTRL(2)+Esc→电脑C盘→KRC→ROBOTER→KRC→R1→Program8 机器人保护当机器人撞车后,会启动自动保护,也就是机器人在A6轴处有一个保护系统,当撞车后弹簧被压弯变形,系统接收到信号后会停止一切操作,此时我们无法操作机器人,这时候我们要先关掉保护开关。
关于KUKA机器人碰撞原因的分析
要 将 机 器 人 改 为 手 动模 式 ( T 1 / T 2 ) 进行操 作 . 在 操 作 时 如 未 将 所选语 句走到初始化 ( B C O) 的前提 下 , 执行下 一条语 句 . 则 机 器 人 运 动 轴 会 自 己选 择 最 优 路 线 . 进 入 下 一语 句 的 指 令 点 。此 时 . 机 器 人 脱 离 了 正 确 的运 行 轨 迹 , 和 工件 发 生 碰 撞 。 此 种 碰撞 方 式 在 库 卡 s m a r t P A D( 即手持编程器 . 以 下 简 称编程器) 上 有 运 行 日志 记 载操 作 记 录 , 碰撞 原 因极 易 查 询 。 3 . 机 器人 制 动 。 机 器人 共 有 三种 制 动 方式 : 分别为 S T O P 0 、 S T O P 1 、 S T O P 2 . 此 三 种 方 式 均 可使 机 器 人 迅 速 停 止 。 其中S T O P O是 由安 全 控 制 系 统 触 发 并 执 行 的 停 止 . 由
过图 1 可知 , 当断开机器人的运行许可时 , S T O P 2被 触 发 , 驱 动装置和制动器不会强制被关断 . 机 器 人 通 过 轨 道 运 行 斜 坡 进 行 制 动 即机 器 人 在 自身 的运 行 轨 迹 中缓 慢 地 停 止 下 来 . 在此种情况下 . 机 器 人 不 会 发 生 碰 撞 的 现象 当断 开 机 器 人 的 驱 动 时 . S T O P 1被 触 发 .驱 动 装 置 在 1 秒后强 制关断 . 机 器 人 为轨 道 外 制 动 . 即机 器 人 的运 行 轨 迹 不 可控 . 在 驱 动装 置 关 断后 , 凭 借 机 器 人 的 自身 运 动 惯 性 停 止. 如 未 给机 器 人 预 留足 够 的 空 间 . 便 会 发 生 和 工 件 碰 撞 的 现象 。 在 向车 间保 全 人 员 进 行 现 场调 查 时 发 现 : 几 乎 每 次 碰 撞 只是 工 件 和 机 器 人 碰 撞 点 处 发 生形 变 . 并 且 打 开 机 器 人 编 程 器 运 行 日志 . 没 有 发 现 人 工 操 作 的痕 迹 但 是 在 车 间保 全 反 映出一个 问题 : 在 线 体 自动 生 产 前 提 下 . 打 开 安 全 门 进 入 线 体 的 次 数越 频 繁 . 机 器 人 发生 碰撞 的几 率 就 越 大 在对 P L C程 序 排 查 时 发 现 , 情 况 如 图 1所 示 : 当 线 体 运 行 模 式 在 自动 条 件 下 .打 开 安 全 门 时 . P L C将 向机 器 人 发 送 驱 动 器 关 闭信 号 .即 命 令 机 器 人 以 S T O P 1方 式 制 动
机器人设备常见故障排除的十个技巧

机器人设备常见故障排除的十个技巧当今社会,机器人设备在各行各业中得到了广泛应用,它们可以高效地替代人力完成繁重、重复性的工作。
然而,机器人也会遭遇各种故障,影响其正常工作。
本文将介绍机器人设备常见故障的十个排除技巧,以帮助用户解决问题并提高机器人的工作效率。
1.电源问题电源问题是机器人设备故障的常见原因之一。
在排查故障时,首先要检查机器人设备的电源连接是否良好,确保电源开关已打开,并检查电源线是否有损坏或断裂。
可尝试更换电源线或连接到其他可靠的电源插座进行测试。
2.通信故障机器人设备通信故障可能导致其无法与其他设备正常交互。
在排除通信故障时,可检查通信线缆是否连接正确、连接松动或损坏。
同时,确保通信模块或接口卡是否正常工作。
如有必要,可以尝试重新安装或更新通信驱动程序。
3.传感器问题机器人设备的传感器在识别和感知环境中起到重要作用。
如果机器人工作出现异常,应检查传感器是否工作正常,如光电传感器、声音传感器等。
遇到故障时,需检查传感器的连接是否松动或损坏,并进行必要的调整或更换。
4.电机故障电机是机器人设备的动力来源,其故障可能导致机器人无法正常运动或执行任务。
在排除电机故障时,应检查电机的连接是否牢固,电机是否正常工作,以及电机驱动器是否配置正确。
如发现故障,及时更换电机或修复电机驱动器。
5.机械结构故障机器人设备的机械结构故障会严重影响其正常运行。
在排除机械结构故障时,要仔细检查机器人的运动零件、联接部件和传动系统是否存在磨损、松动或损坏的情况。
必要时,可进行维护、修复或更换部件。
6.软件问题机器人设备的软件问题可能导致其无法正常运行或执行任务。
在解决软件问题时,可以尝试重新启动机器人设备或相关的软件程序。
如问题仍未解决,可能需要检查软件配置是否正确,或者升级软件版本以纠正错误。
7.操作错误有时机器人设备的故障只是由于操作人员的错误操作所致。
在排除故障时,应仔细检查操作步骤是否正确,是否有遗漏或失误。
KUKA机器人故障信息与故障处理_中文版

软件KRC…错误信息/故障处理 KUKA 系统软件(KSS)版权声明 KUKA RoBoter GmbH若未经出版商许可,任何第三方无权将本文件及其中摘录部分再次出版。
本文件中未提到的功能,该控制器可能也具备。
尽管如此,在重新供货或者提供服务时,用户无权对上述功能提出要求。
我们已经测试了本文件内容与上述硬件、软件的一致性。
但因为一些诧异无法避免,所以我们不保证二者的绝对一致性。
该文件的内容是在一般条件下进行检验的,因此一些必要的修正将在今后的版本中进行。
在不对系统功能产生影响的前提下,保留技术更改权。
目录1 出错提示、故障排除 (4)1.1 提示组 (4)1.2 提示时间 (4)1.3 提示编号 (5)1.4 起因 (5)1.5 提示文字 (5)1.6 故障提示表 (5)出错提示、故障排除1出错提示、故障排除提示窗口将显示各种类型的显示。
它们既可以是不必确认的信息,也可以是必须予以确认的提示一个提示可以由下列部分构成:Message group1.1 提示组说明性提示例如按下某个不允许的键,它给使用者一个说明。
状态提示提示设备的状态。
该状态致使控制器发生反应(例如紧急关断等)消除提示的起因后,提示将被删除。
安全起见,有时会设置一个有待确认的后续提示。
确认性提示它标注某种必须被识别并且用确认键确认的情况。
确认性提示往往是某个状态提示的结果。
确认性提示将停止某个移动动作或者避免继续进行。
对话信息它要求使用者通过软键“是”或者“否”予以确认。
确认之后提示将被删除。
1.2 提示时间该提示时间表明提示是在什么时候出现的。
1 出错提示、故障排除1,3 提示编号根据提示编号,您可以迅速从故障提示中找到相应的原因、影响以及应急措施。
1.4 起因在这个窗口里显示故障的起因。
1.5 提示文字这里显示有关故障的文字描述。
1.6 故障提示表为了能在下列表格中快速找到故障提示,提示号码(不同于显示屏上的显示)是放在第一位的。
KUKA库卡机器人抓取错误信息说明

错误信息说明_____________________________________ Error1:No data for roll diameter!现象机器人停在初始位置不动作产生原因包装机没有发送纸卷直径数据给机器人建议措施在操作台输入当前工位纸卷的直径数据_____________________________________ Error2:No stack was selected at PLC!现象机器人停在初始位置不动作产生原因操作台没有投入任何纸垛建议措施1在操作台投入合适的纸垛2在操作台按下相对应的重新扫描圆心按钮3运行程序_____________________________________ Error3:Too low of the ColumnA(BCD) to scan,Please add ColumnA(BCD)!现象机器人不扫描圆心,然后回到初始位置产生原因纸垛A(BCD)的高度小于安全高度建议措施1加高纸垛A(BCD)2在操作台按下重新扫描纸垛A(BCD)圆心按钮3运行程序_____________________________________ Error4:Scan out of ColumnA(BCD), Please move the paper!现象没有扫描到纸垛A(BCD)的边界,停止扫描,然后回到初始位置不动作产生原因封头位置与原先划定的放置位置差太多建议措施1将纸垛A(BCD)重新放置,不要超出规定放置区域2运行程序_____________________________________ Error5:The scan DiameterA(BCD)can not match the input DiameterA(BCD)!现象机器人扫描纸垛A(BCD)圆心之后回到初始位置不动作产生原因1封头位置与原先划定的放置位置差太多2封头大小与操作台数据大小不一致建议措施1将纸垛放置整齐,不要超出规定放置区域2在操作台处确认封头直径数据,如果错误请重新输入3运行程序_____________________________________ Error6:Too low of ColumnA(BCD)to fetch,Please add ColumnA(BCD)!现象在抓纸过程中返回到初始位置,然后不动作产生原因纸垛A(BCD)的高度小于安全高度建议措施1在纸垛A(BCD)添加封头2运行程序_____________________________________ Error7:ColumnB is higher than ColumnA,Please add ColumnA!现象扫描纸垛A的圆心时回到初始位置不动作产生原因纸垛A高度小于纸垛B高度,有危险不扫描建议措施1增加纸垛A的高度,使纸垛A不低于纸垛B2运行程序_____________________________________ Error8:ColumnA or ColumnC is higher than ColumnB,Please add ColumnB!现象扫描纸垛B的圆心时回到初始位置不动作产生原因纸垛B的高度小于纸垛A或C的高度,有危险不扫描建议措施1增加纸垛B的高度,使纸垛B不低于纸垛A和C 2运行程序_____________________________________ Error9:ColumnB or columnD is higher than ColumnC,Please add ColumnC!现象扫描纸垛C的圆心时回到初始位置不动作产生原因纸垛C的高度小于纸垛B或D的高度,有危险不扫描建议措施1增加纸垛C的高度,使纸垛C不低于纸垛B和D 2运行程序_____________________________________ Error10:ColumnC is higher than ColumnD,Please add ColumnD!现象扫描纸垛D的圆心时回到初始位置不动作产生原因纸垛D的高度小于纸垛C的高度,有危险不扫描建议措施1增加纸垛D的高度,使纸垛D不低于纸垛C2运行程序_____________________________________等待I_NewCylcle现象机器人停在初始位置不动作产生原因包装机没有给机器人抓取封头信号_____________________________________等待I_RobotBegin现象机器人停在工作区域外(接纸架或热压盘)不动作产生原因包装机没有给机器人允许放封头信号_____________________________________力矩过大现象机器人停止不动产生原因由于某些误操作,使机器人撞上某种物体(纸垛)而停止建议措施(参见基本操作部分)1确认信息栏报警2将程序复位3启动程序_____________________________________全体运行封锁现象机器人不能进行手动和自动移动产生原因操作台没有给机器人运行信号建议措施在操作台点亮机器人运行信号按钮。
库卡(KUKA)机器人入门学习必备知识-2024鲜版

2024/3/28
7
工业机器人定义与分类
2024/3/28
工业机器人的定义
工业机器人是一种可编程、多功 能的自动化操作设备,能够执行 各种工业任务,如焊接、装配、 搬运等。
工业机器人的分类
根据机器人的结构、功能和应用 领域,工业机器人可分为关节型 机器人、直角坐标机器人、 SCARA机器人、Delta机器人等 。
1995年
库卡(KUKA)机器人开始进入医 疗、娱乐等新兴市场。
2010年代至今
库卡(KUKA)机器人不断拓展应 用领域,如航空航天、新能源 等。
4
库卡(KUKA)机器人应用领域
汽车制造
库卡(KUKA)机器人在汽 车制造领域应用广泛, 包括焊接、装配、喷涂
等工艺。
2024/3/28
医疗器械
库卡(KUKA)机器人在医 疗器械领域也有应用, 如手术机器人、康复机
ABCD
2024/3/28
了解并掌握库卡机器人故 障处理指南,以便在发生 故障时能够迅速采取正确 的处理措施。
对于可能对环境造成影响 的故障或事故,应及时向 相关部门报告并配合处理 。
25
06
库卡(KUKA)机器人应用案例分 享
2024/3/28
26
案例一:自动化生产线上的应用
汽车制造
库卡机器人在汽车制造领域广泛应用,如焊接、装配、喷涂等工 艺,提高生产效率和产品质量。
年度维护
每年对机器人进行一次全面的维护和保养,包括更换磨损严重的部件、对控制器和驱动器 进行性能测试、对传感器进行校准等。同时,对机器人的使用记录进行分析,为未来的维 护和保养提供参考。
21
05
库卡(KUKA)机器人安全使用注 意事项
工业机器人常见问题浅析

工业机器人常见问题浅析摘要:工业机器人的发展给技术部门带来了新的动力,极大地促进了各个领域创新的发展。
特别是,工业机器人在电气控制领域的应用可以优化电气设备系统,同时使其更加智能化和简化,同时提高电气控制系统技术的安全性和可靠性。
在此基础上,下文讨论了工业机器人的常见问题,供参考。
关键词:工业机器人;常见问题;浅析引言电气设备操作运行过程存在一定的危险,同时控制要求较高,手动控制过程中存在一定的误差。
为了解放劳动力和改进电气控制的应用,可以使用工业机器人代替劳动力。
通过操纵和管理工业机器人,可以降低电气控制过程中出现故障的可能性,同时提高电气设备的使用效率。
1工业机器人控制系统的特点(1)机器人技术与动力学理论、机械力学、要求机器人采取某种行为或动作、具有适当技术参数、机器人在各种操作场景中的轨迹和操作行为之间存在密切联系,这些操作场景也可能发生相应变化,以及机器人在操作时能够水平或垂直移动这一事实。
(2)机器人的每个自由度都对应于独立的运动参数,可直接通过计算机系统进行配置,从而通过配置运动参数使机器人的行为达到最高水平。
(3)通过保留多台机器人路径和工作方式的计算机管理系统,控制机器人执行某些指令的情况。
2工业机器人常见问题分析2.1ABB机器人零点丢失故障ABB机器人使用的编码器为单圈绝对值编码器,即编码器能实时反馈电动机在一圈内的位置信息,单圈内的位置信息不需要额外供电存储。
由于减速机/齿轮箱的存在,机器人的某个轴旋转180°时电动机已经旋转了几十圈,电动机旋转超过一圈,编码器发出的位置又从零开始,故对于单圈绝对值编码器,还需要一个设备对电动机旋转圈数进行计数。
SMB板具有两个作用,一是模数转化,将编码器(Resolver)传过来的模拟量信号转化为数字信号;二是对电动机圈数进行计数。
而电动机圈数在SMB板中存储需要电源,在机器人控制柜开启时,由控制柜给SMB板供电;在关闭控制柜时,则由SMB板上的电池进行供电。
KUKA机器人两个错误现象的解决方法
11月29日,E90折边工位机器人报告错误: Ackn common KSD-Error A1 (错误代码2962) Ackn common KSD-Error A2 (错误代码2962) …… Ackn common KSD-Error A6 (错误代码2962) Ackn Synchronization error drive A1 (错误代码1239) Ackn Synchronization error drive A2 (错误代码1239) …… Ackn Synchronization error drive A6 (错误代码1239) 查找KUKA错误代码,没有说明。 怀疑KPS600有问题,可能工作不稳定,导致数据同步出错。 更换KPS600问题解决,确定损坏部件。 该工位已恢复正常。 Title
BMW Brilliance Automotive Title Body Shop 2010-9-8 Zhang Mingli Page 1
11月25日,E90折边工位机器人报告错误: Incorrect servo parameter A1 (错误代码1115) Incorrect servo parameter A2 (错误代码1115) …… Incorrect servo parameter动总线通讯错误。 更换MFC卡,未见效果。 更换机器人控制柜,问题解决,换下来的控制柜离线维修。 更换总线通信电缆,未见效果。 更换KPS600问题解决,确定损坏部件。
Title
Shenyang 2010-9-8
Sheer Driving Pleasure
BMW Brilliance Automotive Title Body Shop 2010-9-8 Zhang Mingli Page 2
KUKA机器人报警信息处理更新1.1
KUKA报警信息处理
1、KSS00276 机器人参数不等于机器人类型
①登录专家模式
②示教器操作:【菜单】—【显示】—【变量】—【单个】
③名称输入:$ROBTRAFO[]
新值:TRAFONAME[]
④点击【设定值】。
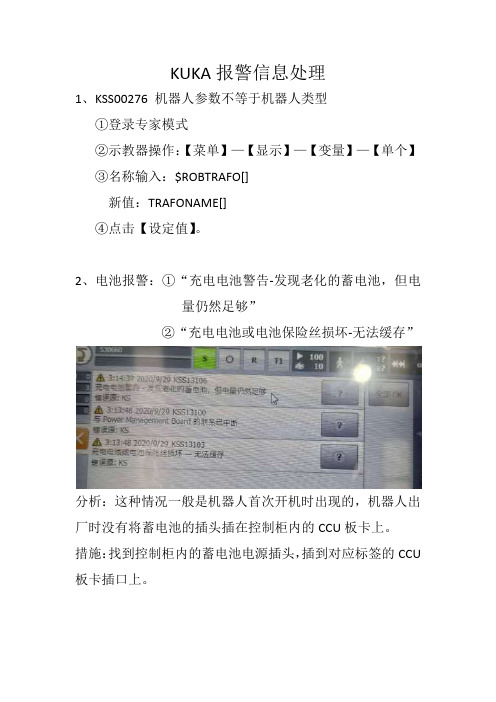
2、电池报警:①“充电电池警告-发现老化的蓄电池,但电
量仍然足够”
②“充电电池或电池保险丝损坏-无法缓存”
分析:这种情况一般是机器人首次开机时出现的,机器人出厂时没有将蓄电池的插头插在控制柜内的CCU板卡上。
措施:找到控制柜内的蓄电池电源插头,插到对应标签的CCU 板卡插口上。
3、.KSS00203-全部运行开通
措施:①【主菜单】—【配置】—【输入/输出端】—【外部自动运行】下;
②在【输入端】找到$MOVE_ENBALE对应的通道改为
1025。
如果外部自动运行时,检查PLC端信号。
4、KSS00308 卸码垛模式:将轴A5+移到位
①登录专家模式
②示教器操作:【菜单】—【显示】—【变量】—【单个】
③名称输入:$pal_mode
新值:true
④点击【设定值】更新
⑤重启控制柜。
5、KSS15012 确认开关损坏
分析:示教器使能键分三个档位:
①正常不按时为一个档位;
②正常上电移动机器人时,第二个档位;
③按到底时第三个档位,会出现安全停止的报警。
处理:将使能键按到底,会出现“确认开关故障”的确认信息,点击“OK”即可。
KUKA机器人车身打号机的工作流程及故障分析
KUKA机器人车身打号机的工作流程及故障分析摘要:本文介绍了KUKA机器人车身打号系统,它主要用于混合车型的车号打印,较详细的介绍了车身打号机的自动流程及出现问题后的解决措施。
关键词:KUKA机器人打号系统Abstract:This article describes a KUKA robot body to fight the system, it is mainly used for the license plate number of hybrid models print more detailed introduction to the body marking machine automatically processes and problems, solutions.Key word:KUKA robot Marking system1 引言工业机器人是一种通过重复编程和自动控制,能够完成制造过程中某些操作任务的多功能、多自由度的机电一体化自动机械装备和系统[1]。
1962年美国Unimation公司的第一台工业机器人“UNIMATE”在美国通用汽车公司(GM)投入使用,这标志着第一代机器人的诞生,从此,工业机器人技术不断进步,产品不断改进和完善,逐步发展形成了第一代可编程控制再现型工业机器人及其技术。
进入20世纪80年代,工业机器人的制造形成产业,并被广泛用于制造行业。
如美国的PUMA机器人、意大利的SMART机器人、日本的MOTOMAN机器人、德国的KUKA机器人、ABB公司的IRB机器人等。
2 车身打号机的结构车身打号机设备是用于混合打印速腾、迈腾、高尔夫、迈腾CC 等车型的车身底盘号。
车身底盘号的打印是用KUKA机器人来驱动的,右边的机器人是主机,用于平时的正常打印,左边的机器人用于备用,在主机有故障的情况下使用。
KUKA机器人的打印头可以打印几种车型[3],可以分车型更换打印头,车身数据与传感器感应出不同的车型,机器人做出不同的运动轨迹,来打印不同区域。
常见的KUKA机器人示教器故障以及相应的维修方法

常见的KUKA机器人示教器故障以及相应的维修方法KUKA机器人示教器是一种用于编程和控制KUKA工业机器人的重要设备。
虽然它具有可靠性和耐用性,但有时也会遇到需要维修的情况。
以下将介绍一些常见的KUKA机器人示教器故障以及相应的维修方法。
1、如果示教器无法开机或无法显示图像,可能是由于电源问题引起的。
确保示教器连接正确的电源插座,并检查电源线是否完好无损。
如果仍然无法解决问题,可以尝试更换电源适配器或联系KUKA技术支持获取进一步的帮助。
2、如果示教器屏幕上显示错误信息或操作异常,可能是软件问题导致的。
可以尝试重新启动示教器,并检查是否存在任何软件更新。
如果问题仍然存在,可以尝试恢复出厂设置或重新安装机器人编程软件来解决问题。
在执行这些操作之前,请务备份任何重要的程序和数据。
3、示教器的触摸屏可能会出现响应迟缓或失灵的情况。
首先,清洁触摸屏表面,确保没有污垢或液体影响其正常操作。
如果问题仍然存在,可以尝试校准触摸屏或更换故障的触摸屏模块。
最好在进行这些维修操作之前咨询专业人员的建议。
4、示教器的按键和控制杆也可能出现损坏或失效的情况。
如果某个按键无法正常工作,可以尝试清洁或更换按键。
对于控制杆问题,可以检查连接线路是否完好,并确保控制杆没有受到物理损坏。
如果需要更换控制杆,建议联系KUKA经销商或技术支持获取合适的替代品。
KUKA机器人示教器维修需要注意安全,并尽量由经过培训和熟悉机器人系统的专业人员进行操作。
如果遇到无法解决的问题,建议及时联系KUKA技术支持或经销商寻求帮助。
保持设备的良好维护和定期检查也有助于减少故障发生的可能性,并延长示教器的使用寿命。
KUKA相关问题点的解决参考

6.DSE-RDW transmission Error RDW – DSE传输错误,掉零点。
(1)X21-X31 DATA cable 数据线(插拔, 看接头,看针头) (2). RDW DSE (更换MFC3+DSE) (3).打开RDW,无电源更换RDW卡 (4).ESC-X19(RDW的供电) (5).A32-ST4
KUKA相关问题点的解决参考
1.Data of RDC and Hard Disk inconsistent! Check robot data? ( RDW与硬盘上的数据不一致!检测机器人 数据?)
解决参考:选择RDC或者Hard Disk 都可以,一般选择RDC。具体要看情 况。即机器人参数,选择错了也不影 响机器人运行。 备注:专家模式下选择。
4.黑屏
(1).电源问题(总电源380、KPS27 、PC 电源) (2).KCP (3).显卡 (4).内存(换插槽) (5).主板 (6).cpu (7).ESC (CI3 X5 KCP的电源)
5.进不了系统
一:进不了windows (1).BIOS configuration error 主板电池没电,更换 恢复出厂设置 (2).operation system not found 软件、主板IDE接口线 (可用带系统备用硬盘) 二:进不了HMI 卡在10% 20% (1).软件 (2).硬件:MFC3/主板 (特殊固件的电器元件) 三:进入HMI,但是按键无反应,死机 (1).软件 (2).硬件:KCP / MFC3(用鼠标有反应) /ESC
2.Safety circuit for drives not ready. 经常还伴有急停 外部急停 安全回路没有准备好
KUKA机器人编程手册[11]
![KUKA机器人编程手册[11]](https://img.taocdn.com/s3/m/a8b6b185c67da26925c52cc58bd63186bceb92fd.png)
KUKA机器人编程手册KUKA编程手册一、概述二、系统组成本体:本体是由多个关节和连杆构成的可移动结构,它可以在空间中执行各种运动。
本体上还安装了各种传感器和执行器,用于控制和监测的状态。
控制柜:控制柜是系统的核心部分,它包含了的控制器、电源、驱动器、通讯模块等硬件设备。
控制柜负责接收和处理来自操作员或外部设备的指令,以及向本体发送控制信号。
操作面板:操作面板是系统的人机交互界面,它可以通过有线或无线方式与控制柜连接。
操作面板上有显示屏、按键、开关、指示灯等组件,用于显示和输入的相关信息和参数。
外部设备:外部设备是指与系统相连的其他设备,例如工具、夹具、传送带、视觉系统等。
外部设备可以通过数字或模拟信号、以太网、总线等方式与控制柜通讯,实现与的协同作业。
三、操作3.1 启动和停止启动:在控制柜上按下启动按钮,控制柜将进入就绪状态,并向操作面板发送启动信号。
在操作面板上按下确认按钮,控制柜将进入运行状态,并向本体发送使能信号。
此时,可以接收并执行指令。
停止:在操作面板上按下停止按钮,控制柜将进入停止状态,并向本体发送停止信号。
此时,将停止当前的运动,并保持当前的位置。
在控制柜上按下停止按钮,控制柜将进入关闭状态,并断开与操作面板和外部设备的通讯。
3.2 模式切换自动模式:自动模式是系统的正常工作模式,也是最常用的模式。
在自动模式下,可以自动执行存储在控制柜中的程序,并根据程序中的逻辑和条件进行判断和分支。
自动模式下,操作员只能通过操作面板上的启动、停止、暂停等按钮控制的运行,不能通过手动移动的方式进行操作。
手动模式:手动模式是系统的调试和维护模式,也是编程的基础模式。
在手动模式下,可以通过操作面板上的方向键或手轮进行手动移动,也可以通过操作面板上的其他按钮进行参数设置、程序编辑、故障诊断等操作。
手动模式下,的运行速度受到限制,以保证操作员的安全。
外部模式:外部模式是系统的扩展模式,用于与外部设备进行协同作业。
kuka机器人故障处理

04
预防性维护与保养
日常保养
每日清洁
每天清理机器人表面灰尘,保持 清洁。
检查紧固件
检查机器人各部位紧固件是否松动 ,如有需要,及时紧固。
润滑关节
对机器人关节涂抹润滑脂,减少磨 损。
定期维护
清洁控制柜
每季度清理控制柜内部灰尘,保 持散热良好。
检查电缆
每半年检查电缆是否有破损或松 动,确保信号传输稳定。
传感器无法正常工作,导 致机器人无法正确感知周 围环境或自身状态。
机械故障
机械部分出现磨损、松动 或断裂,影响机器人的稳 定性和精度。
软件故障
程序错误
机器人程序存在逻辑错误 或运行时异常,导致机器 人无法按照预期执行任务 。
操作系统故障
机器人操作系统崩溃或出 现异常,导致机器人无法 正常启动或运行。
02
故障诊断与排查
观察法
总结词
通过观察机器人的外观、显示屏、指 示灯等来判断故障。
详细描述
观察机器人是否有明显的损坏,如破 裂、变形等;检查显示屏是否有异常 提示或错误代码;观察指示灯是否正 常闪烁。
替换法
总结词
用正常部件替换可能存在故障的部件 ,以确定故障部位。
详细描述
如果怀疑某个部件存在问题,可以尝 试将其替换为正常工作的部件,观察 机器人是否恢复正常。
机器人无法启动
总结词:当 KUKA 机器人无法启动时, 可能是由于多种原因引起的。
安全保护机制:可能是安全保护机制被 激活,需要检查安全设备的状态,如光 幕、安全门等。
控制柜故障:检查控制柜内的硬件设备 是否正常,如控制器、驱动器等。
详细描述
电源故障:检查电源是否正常,确保电 源插头没有松动或损坏。
机器人的故障排除与维修

机器人的故障排除与维修近年来,机器人技术的迅速发展使得机器人应用于各个领域成为可能,带来了诸多便利与效益。
然而,机器人在运行过程中难免出现故障,这不仅会影响其正常工作,还可能带来一系列的安全问题。
因此,了解机器人的故障排除与维修方法显得尤为重要。
本文将从机器人的故障原因、排除方法和维修技巧三个方面进行阐述。
一、机器人的故障原因机器人的故障原因多种多样,可以归纳为以下几类:1. 电路故障:电路故障是机器人故障的常见原因之一。
它可能由电路元件损坏、电路板破损、焊接不良等引起。
在排除电路故障时,首先应检查电路连接是否正常,然后使用测试仪器进行测量,确定具体故障位置。
2. 机械故障:机械故障包括各种部件的损坏或失灵,例如电机异常、机械臂卡死、传动系统故障等。
对于机械故障,需要仔细检查机器人各个部件的工作状态,排除可能出问题的部件,并进行必要的修复或更换。
3. 传感器故障:机器人的传感器在感知外部环境和获取数据方面起着重要作用。
如果传感器故障,机器人无法正常获取数据,也无法准确执行任务。
因此,排除传感器故障是维修机器人的重要环节。
二、机器人故障排除方法针对不同的故障原因,我们可以采取一些常见的故障排除方法:1. 定位故障点:首先要确定故障的发生部位,可以通过检查机器人工作流程、观察机器人运行过程中的异常现象等方式进行定位。
只有明确故障点,才能更好地解决问题。
2. 检查机器人电路:针对电路故障,需要检查和测试机器人电路板的连接情况以及各个电路元件的工作状态,发现问题后进行修复或更换。
3. 检查机械部件:对于机械故障,需要检查机器人的各个机械部件,包括电机、传动系统、机械臂等,确保它们没有损坏或卡死。
如有需要,进行相应的修理或更换。
4. 校准和调试传感器:若发现机器人传感器故障,需要对传感器进行校准和调试。
校准可以消除传感器误差,确保传感器的准确性。
调试可以优化传感器的参数设置,提高机器人的感知能力。
三、机器人维修技巧机器人维修是一个复杂且技术要求较高的过程,以下是一些维修中应注意的技巧:1. 安全第一:在进行机器人维修时,首先要确保操作人员的安全。
KUKA机器人故障信息与故障处理_中文版

KUKA机器人故障信息与故障处理_中文版标题:KUKA机器人故障信息与故障处理一、引言随着工业自动化的快速发展,KUKA机器人作为全球领先的工业机器人品牌,已被广泛应用于各行各业。
然而,与所有机械设备一样,KUKA 机器人也会出现各种故障。
本文将详细介绍KUKA机器人常见的故障信息及其处理方法,旨在帮助用户更好地使用和维护KUKA机器人,确保生产过程的顺利进行。
二、KUKA机器人常见故障信息1、启动故障:KUKA机器人在启动时可能无法正常启动,这可能是由于电源故障、控制器故障或启动程序错误等原因造成的。
2、运动故障:在运行过程中,KUKA机器人可能无法按照预设的路径运动,或者运动速度异常。
这可能是由于机械故障、传感器故障或驱动系统故障等原因造成的。
3、程序故障:KUKA机器人的运行程序可能会出现错误,导致机器人无法正常执行任务。
这可能是由于编程错误、程序崩溃或外部干扰等原因造成的。
4、传感器故障:KUKA机器人使用的传感器(如接近传感器、激光传感器等)可能出现故障,导致机器人无法正确感知周围环境。
三、KUKA机器人故障处理方法1、启动故障处理:遇到启动故障时,首先检查电源连接是否正常,然后检查控制器是否工作正常。
如果以上都正常,可能需要检查启动程序是否有错误。
2、运动故障处理:遇到运动故障时,首先检查机械和传感器是否工作正常。
如果正常,再检查驱动系统是否有故障。
根据检查结果进行相应的维修或更换。
3、程序故障处理:遇到程序故障时,首先重启机器人,看是否能解决问题。
如果问题仍然存在,可能需要重新编写或调整运行程序。
4、传感器故障处理:遇到传感器故障时,首先检查传感器连接是否正常。
如果不正常,则需要更换或修理传感器。
如果正常,则需要检查机器人的工作环境,看是否有影响传感器正常工作的因素。
四、结论尽管KUKA机器人具有高度的可靠性和稳定性,但仍然可能会出现各种故障。
了解这些可能的故障信息并掌握相应的处理方法,对于保证KUKA机器人的正常运行至关重要。
机器人操作的常见问题及解决方案

机器人操作的常见问题及解决方案随着技术的发展和进步,机器人已经开始成为我们日常生活和工作中的一部分。
无论是在工厂生产线上,还是在家庭中作为助理和家务机器人,它们的应用范围越来越广泛。
然而,随着机器人普及程度的提高,我们也会遇到一些常见问题。
本文将介绍机器人操作中的常见问题,并提供相应的解决方案。
一、机器人无法启动或电池使用时间短有时候我们可能会遇到机器人无法启动或者使用时间非常短的问题。
这个问题通常是由以下原因引起的:1.1 电池电量不足:解决这个问题的方法很简单,只需要将机器人连接到充电器并等待足够长的时间,以确保电池充满。
1.2 电池老化或损坏:如果机器人已经使用了一段时间,并且电池使用时间明显减少,那么可能是因为电池老化或损坏。
此时,建议更换新的电池。
1.3 电源线连接问题:机器人无法启动的另一个常见原因是电源线连接不牢固。
请检查电源线是否正确连接,并确保插头和插座无损坏。
二、机器人移动遇到困难或无法正常行走有时候我们可能会发现机器人在移动时遇到困难,或者根本无法正常行走。
下面是一些常见原因和解决方案:2.1 地面不平整:机器人需要在相对平坦的地面上行走。
如果地面的不平坦导致机器人无法行走,可以清理地面杂物,或者考虑将机器人放置在适合行走的地方。
2.2 轮子故障:机器人无法行走的另一个原因是轮子可能有故障或损坏。
请检查机器人的轮子是否正常,并及时更换损坏的轮胎或修复故障。
2.3 传感器故障:机器人用于感知环境和导航的传感器可能会出现故障,导致机器人无法行走。
此时,建议检查和清洁机器人的传感器,并确保传感器正常工作。
三、机器人操作与其他设备不兼容在日常生活中,我们可能需要将机器人与其他设备(如手机、电脑等)进行连接和操作。
然而,有时候我们会遇到设备之间不兼容的问题。
以下是一些常见解决方案:3.1 更新软件:有时候更新机器人的软件可能会解决与其他设备不兼容的问题。
建议将机器人的软件保持最新版本,并根据需要进行更新。
KUKA库卡机器人故障报警维修处理方法

KUKA库卡机器人维修故障处理方法报警文本保存在文件中。
无确访问这些文件中的一个文件。
反响:报警显示。
处理:扩大报警列表( 在文件的报警一节中输入文件最大数量)。
然后执行操作员面板冷再启动。
减少报警文本数目。
然后执行操作员面板冷再启动。
凌肯自动化机械负载是否有突变变频器容量是否太小,增大变频器容量电网电压是否有突变, 过流,减速中或停车时过流, 输出连线绝缘是否良好,电动机是否有短路现象延长减速时间更换容量较大的变频器, 直流制动量太大,减少直流制动量机械故障。
输出线绝缘是否良好, 检查电动机是否堵转故障现象发生时的工作状况.处理方法,过流,恒速中过流检查电动机是否短路或局部短路送厂维修,短路, 对地短路检查电动机连线是否有短路检查输出线绝缘是否良好送修,, 过压, 停车中过压,, 延长减速时间否则加大容量检查机械负载是否有卡死现象 V/F曲线设定不良。
KUKA库卡机器人维修PLC编程840D的集成式PLC完全以标准sIMAncs7模块为根底,PLC程序和数据内存可扩展到288KB,u/o模块可扩展副2048个输入/输出点,PLC程序能以极高的采样速率数据输入,向数控机床发送运动停止/起动等指令。
电机参数的输入变频器的参数输入工程中有一些是电机根本参数的输入,如电机的功率,额定电压,额定电流,额定转速,极数等。
这些参数的输入非常重要,将直接影响变频器中一些爱护功能的正常发挥,肯定要依据电机的实际参数正确输入,以确保变频器的正常使用。
为了能够简化设备系统的传动环节,提升综合传动效率和操纵性能,除了有一般旋转电机以外,变频伺服的传动执行部件还经常会有一些不同类型的动力输出形式,如:旋转直接驱动电机,直线电机,直线电动缸等等。
在将旋转伺服电机的输出动力传递到运动负载的过程中,运控系统系统往往还需要使用到各种伺服级别的机械传动组件,如:联轴器,减速机,同步带,丝杠等等,这一点也是有必要提示大家注意的。
KUKA库卡机器人维修F077维修,F078维修,F079维修,F006维修,F007维修,F008维修,F009维修,F080维修,F081维修,F031维修,运转速度不稳定维修,可控硅晶闸管烧维修,直流调速装置无显示维修,运转速度不连贯维修,高速不稳定维修,低速不稳定维修,启动合闸跳保险维修,运转不出力维修,报励磁故障维修,优化通不过维修,启动报代码故障维修,炸机维修,电源板坏维修,速度不可控维修,超速维修。