宝元IO转接板使用说明
宝元接对刀仪说明

宝元接对刀仪根据用户的反馈,特别编辑了对刀仪接宝元系统的说明一:硬件准备与识别1:对刀仪一个。
(通常用常闭的,不过宝元系统改常开常闭比较方便,如果实在没常闭的常开也一样使用。
)2:弄清楚对刀仪每根线的定义。
(一般由这几个定义组成:对刀信号,过行程保护信号,对刀信号输入端,过行程保护信号输入端,24V,0V)3:找到宝元系统对刀信号输入端口,宝元系统对于对刀仪端口是专用的端口。
这点比新代系统做的好一点。
一般在显示屏背面,一个标有SH1或(L-IN1)的接线端口。
如下图:4:找到上图报警接口OT1和OT2,把上面的跳线卸掉。
然后这两个接口分别接对刀仪过行程保护的两条线即可。
(这是在机床没有写对刀过行程保护PLC接口时的最简单有效的接法。
)5:以上四点都完成了,开始对刀仪信号线与宝元系统连接。
如下图:二:以上硬件准备就绪后接下来是参数设置和对刀程序的设置了。
1:对刀命令的设置如下图:上图是设定对刀变数的G码和M码。
一般G码为36,M码为06.2:设定对刀信号的常开或常闭极性,如下图:上图是对刀信号点的常开和常闭设定,NC表示常闭,NO表示常开。
3:设定对刀信号输入点的接口,是1口还是2口。
如下图:上图是接口设定窗口。
宝元对刀信号口提供了两个,可以任意选择1或者2接口。
4:对刀宏程序的导入和编辑。
上图为对刀宏程序显示窗口,宝元一般为O9004和O9010两个。
一个设定落差用,一个对刀用。
在宏程序里面可以修改对刀速度,对刀次数,对刀吹气的时间。
一般更换对刀仪不需要宏程序,如果是新装对刀仪就需要宏程序。
如果需要可以加我个人微信号(szzww314)获取下载地址。
5:开启是否使用对刀仪功能,如下图:上图是开启对刀仪是否使用的功能和对刀报警功能。
三:以上为宝元系统安装对刀仪到参数设定的全部图文内容,如果感觉还是不是很详细。
可以关注我们的微信公众号:qq28336389(国雕数控维修)。
里面有更多详细的内容可分享朋友圈。
LNC-Bend8000宝元系统说明书
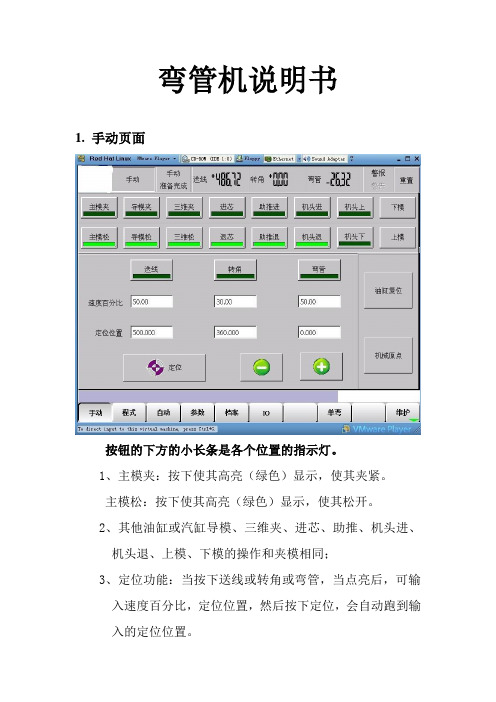
弯管机说明书1. 手动页面按钮的下方的小长条是各个位置的指示灯。
1、主模夹:按下使其高亮(绿色)显示,使其夹紧。
主模松:按下使其高亮(绿色)显示,使其松开。
2、其他油缸或汽缸导模、三维夹、进芯、助推、机头进、机头退、上模、下模的操作和夹模相同;3、定位功能:当按下送线或转角或弯管,当点亮后,可输入速度百分比,定位位置,然后按下定位,会自动跑到输入的定位位置。
4、+、-:对选中的轴做移动动作,速度由所选轴下面的速度%来决定。
5、气缸重置:按下此按键,所有的汽缸复位,回原点时,会先把所有汽缸复位掉。
6、机械原点:首次开机,需要回原点,按下此键,各个轴回依照系统设定的速度执行回原点动作,当有汽缸未复位时,会触发“气缸没有复位,不能回原点”警报,按下气缸复位键,再执行回原点动作。
7、现在位置:上面显示对应伺服轴当前的机械位置;2.程式页面模具到管前端距离:可设置模具跟管前端的距离,为了计算总长。
机械行程:可输入机台的机械行程,便于系统能自动计算出尾料长度。
管径:输入目前加工管件的直径。
1、第一点X坐标:可设定第一点X轴的坐标2、第一点Y坐标:可设定第一点Y轴的坐标3、第一点Z坐标:可设定第一点Z轴的坐标4、档案名称:显示当前加工程式的档案名5、图形预览:按下此键后,会跳到图形模拟页面6、转成YBC: 由坐标数据转换成动作数据7、转成YBC(反向弯曲): 由坐标数据转换成动作数据3. 自动页面1.档案名称:可显示当前加工的档案名称2.总数量:可显示机台加工的总数量3.设定产量:可设定预加工的产品数量4.当日数量:可显示当日加工的数量5.上料时间:在加工完一个程式后,各轴回待机点后,上料等待时间6.下料时间:在加工完一个程式后,各轴回待机点前,下料等待时间7.半自动:当进入到自动页面后,默认为半自动模式,当按下此按键后,会变成全自动模式8.单步:当按下单步按钮后,会执行单步动作9.弯曲角度、弯曲速度%:显示当前弯曲的角度,弯曲速度可按照%来调整。
宝元说明接510I线

z CAD/CAM z 網路功能
1.2 LNC-M510i 控制器
LNC-M510i 控制器採用標準的工業電腦為基礎,適用於一般工具機、產業機器與自動化機具,此構裝具有良好 的維護性,高性能的運動控制功能與多點數 I/O 點支援,可廣泛應用於各種工業應用,加上 PC 的開放式系統, 模組化的設計,使系統性能升級容易,維護更方便。 主要規格如下: 1. 傳輸介面支援 Ethernet、DNC 2. 提供 3 軸同動 Pulse / Vcmd 位置迴路控制(Vcmd 為選配) 3. 提供主軸介面 Pulse / Vcmd 介面 4. 提供一組編碼器輸入可給 MPG 使用 5. I/O 介面支援到 128 Input / 128 Output 點
1.1 一般規格及選配規格.......................................................................................................................1 1.2 LNC-M510i 控制器 ........................................................................................................................1 1.3 硬體規格.........................................................................................................................................2 1.4 LNC-M510i 電源需求 .....................................................................................................................2 1.5 軟體規格.........................................................................................................................................3
伺服增强隔离型 IO 转接板说明书
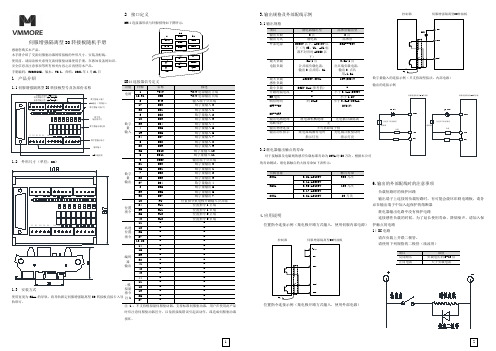
1.2 外形尺寸(单位:mm)
轨即可。
2 接口定义
DB44
DB44连接器信号定义
3.输出规格及外部配线示例
3.1输出规格
的寿命测试,继电器触点的大致寿命如下表所示:
位置指令连接示例(集电极开路方式输入,使用外部电源)
控制器伺服增强隔离型IO转接板
2)AC 电路
请与负载并联下列规格的浪涌吸收器(浪涌抑制器、电火花消除器等CR 左组合元器件)
项目 参考取值 额定电压 250V 电容 0.1uF 左右 电阻值
100 ~120欧左右
同相
请同相使用伺服增强隔离型IO 转接板的输出触点
7.使用说明
伺服增强隔离型IO 转接板与伺服驱动器连接方法如下图所示:
另一端连接伺服增强隔离型IO 转接板DB44连接器把螺丝固定好,用户根据自己需要使用的IO 端子
关于质保
对于非属本公司责任事故所造成的伤害,和由本公司产品的故障所引起的客户机会损失、利益损失以及无论本公司有否预见到的由于特别事件所造成的损害、间接损害、事故赔偿、非本公司产品以外的损伤以及对其他业务的赔偿,本公司恕不负责。
关于本手册
在本书中,并没有对工业知识产权及其他权利的执行进行保证,也没有对执行权进行承诺。
对于因使用本书中所记载的内容而引起的工业知识产权上的各种问题,本公司将不负任何责任。
请妥善保管好产品中附带的使用说明书,以便需要时可以取出阅读,并且必须将其交至需要它的最终使用者手中。
该印刷品发行于2021年4月。
基于持续发展的策略,有时可能会在不预先通知的情况下对本文档中描述的产品进行修改和改进,还请见谅。
VMMORE CTRL. & TECH. CO., LTD.。
投币器电脑转接板WF-702USB中文使用说明书_

(USB/RS232接口)脉冲式投币器与电脑连接适配器WF-702USB用户手册Version3.1-1408 1.0介绍WF-702接口板通过内置的RS232接口模块连接硬币接收器或者纸币器和PC主机的电脑的USB 接口,通过安装驱动的方式在电脑系统中生成虚拟串口。
通过WF-702,终端开发用户能比较容易地开发投币控制设备,而不需要去考虑各种投币器的控制性能和控制接口。
WF-702USB,WF-700-RELAY和WF-700USB是WF-700的升级版本,通过一个四位的拨码开关,能轻易设置相关工作参数。
WF-700具有的“Lockout”计时器功能,在主机没有按照响应的工作频率进行交互工作的时候,或者在主机遇忙或者其它意外故障时,能够禁止投币器工作,直到主机恢复工作。
.2.0主要参数波特率:-9600工作方式:-半双工通讯字符格式:1位起始位,1位停止位,8位数据位(Bits0=sent first(LSB)锁定计时器在一定的时间内,如果WF-702没有收到响应的请求,则按照硬件拨码开关的设定进行锁定投币器。
锁定时间可以通过拨码开关设置为:1秒,10秒,20秒或者不锁定数据堆栈,并行模式WF-702具有一个串行数据堆栈,堆栈是FIFO方式组成,在与主机的通信丢失的情况下,投币数据会被暂存在WF-700数据堆栈中,当数据堆栈满后,则WF-700会自动禁止硬币器,避免发生数据丢失。
WF-702的串行数据堆栈是一个硬币数据脉冲计数器,能最多记录261个脉冲数据。
每一个脉冲输入会被生成一个单一的数据。
比如我们在硬币中设置一个1元人民币输出2个脉冲,一个5角人民币输出1个脉冲的时候。
我们每投入一个1元硬币,则会向PC上传两串数据。
每投入一个5角硬币,WF-702则会向PC上传一串数据。
3.0数据格式,上传数据方式数据格式:STX,Length,MSG Type and Ack#,Data Fields…..,ETX,Checksum数据格式说明:STX-02h起始位LENGTH-单字节,代表信息中包含的数据总个数(统计数据个数时,包含起始位,结束位,校验位)MSG TYPE and ACK#-单字节MSG Type-(Bits4-7):信息类型0001–主机向WF-702发送数据0010–WF-700向主机发送数据0011to0111–保留ACK#-(Bits0-3):响应位00h或者01h在主机向WF-702发送数据中,ACK#是用于区别信息类型,可以是01或者10。
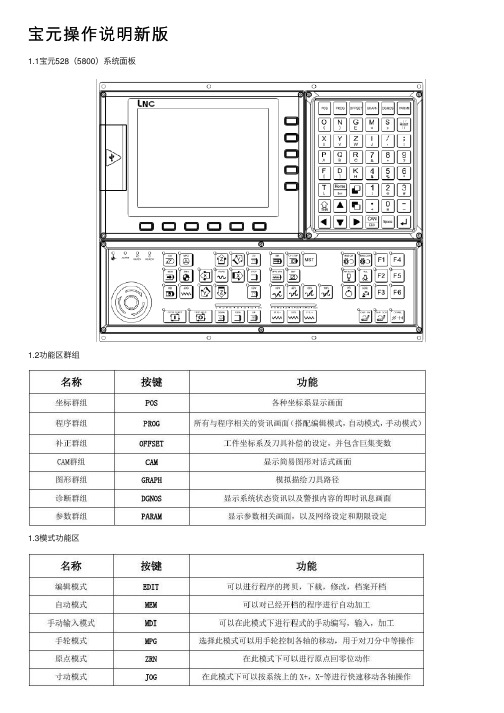
宝元操作说明新版

1.1宝元528(5800)系统面板1.2功能区群组1.3模式功能区1.4按键区等2宝元528(5800)系统操作使用2.1一般操作流程:1)开机---回机床原点---工件分中----对刀-----拷贝加工程序----选择程序进行开档---切换到自动模式(自动模式)---手轮模拟(F2)-----启动(CYCLE START)2)回原点:ZRN---启动(CYCLE START)(直到面板上HOME指示类亮为止,表示回原点完成3)分中:补偿----座标系设定----矩形中心---设X1,X2,Y1,Y2,(为四面分中)对刀:补偿---座标系设定----一般设定---设Z。
5)拷贝程序:编辑模式---PROG—档案总管---复制档案----选择E或Z盘----选择要加工的文件名----确定文件名----将加工文件进行开档。
2.2常用命令:1)移动至要加工工件的中心点(下例为:G54座标系来说明的)按下《手动输入》输入“G54G0X0Y0”--按下《登录》--按下《启动(CYCLE START)》2)输入主轴转速手动输入—输入“M3S10000”---登录----启动(CYCLE START);M3表示主轴正转,S10000表示转速值为每分钟10000转。
3)加工前座标偏移(机床重启后数值不变,应注意在加工另一工序时改为0)补偿---座标系设定----移动光标至0座标系----输入您想要偏移的轴及值---确定(按回车键)(例如:输入“Z10”,表示在G54座标系的基础上将Z轴抬高10MM。
)4)加工中偏移座标(手轮中断,机床重启后自动归0)按下程序暂停(FEED HOLD,灯亮)---F3(手轮中断)---按下座标---按下《手轮中断》----用手轮移动你想要偏移的轴和值。
注:A:未重新启动时,这偏移值仍然有效,在加工另一工序时应用手轮中断功能将该手轮移动值移动为零。
B:手轮中断有模式控制锁定的,在自动模式(自动模式)下的程序暂停的情形下,按下操作面板上的F3才能启动手轮中断功能(手轮插入功能)。
转接板的使用说明
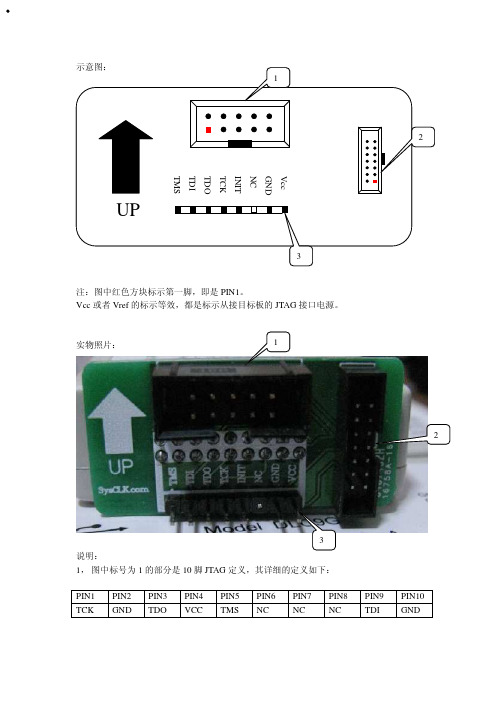
注:图中红色方块标示第一脚,即是PIN1。
Vcc 或者Vref 的标示等效,都是标示从接目标板的JTAG 接口电源。
实物照片:说明:1, 图中标号为1的部分是10脚JTAG 定义,其详细的定义如下: PIN1 PIN2 PIN3 PIN4 PIN5 PIN6 PIN7 PIN8 PIN9 PIN10 TCK GNDTDOVCCTMSNCNCNCTDIGND直观对应图如下:其中两个GND在转接板子以及仿真器内部电路板上都是连接在一起的,可以只用一个GND 。
2, 图中标号为2的部分是14脚2.0MM 针距的JTAG 定义,其引脚定义和下载器本身的14脚2.54MM 定义完全对应,都是完全对应XILINX 的原厂接口定义。
也可以直接直观参照盒子上的标签,请注意PIN1的对应,如下:GND VCC NC NC GND TCKTDOTMSNCTDI3,图中标号为3的部分是分离的单股杜邦线的JTAG定义。
这是一种最为灵活的方式,可以直接接在目标板上的插针或是JTAG座上。
如下图所示:常问问题:1,为什么下载器盒子上的接口是14针的,而转接板背面的插口却是10个孔?答:可以的,18孔左右两面各有2个不连接的孔不插在针上的,只是为了占用那个位置,起到防止接插错位的作用。
插的时候注意先从一面对其,之后悠着用力,就可以接插好。
我们之前采用过14孔的接插件,有顾客反馈容易不对其,这是我们改进后的设计。
接插的时候可能要使点巧劲,但是杜绝了接插错位带来的纠结。
发货前测试过,都是可以接插成功的。
2,在JTAG模式下INIT信号线怎么接?答:INIT只是在SPI模式作为WP(写保护),以及Serial模式下做INIT(初始)用,大多数用户使用的是JTAG模式,在JTAG模式下直接忽略此信号线。
常识附录:1,如何识别常见JTAG插座的针脚序号:我们常说的10PIN实际是10脚,也就是10根插针,同理nPIN就是n脚,n针。
下图是比较常见的10PIN JTAG座实物照片,并且标上针脚号:常见的还有14PIN,20PIN的其样式都是一样的,都会看到有个缺口,为了表示得更明白,我们做个从顶部先下看的抽象示意图,并标上针序:`。
研华宝元 M688D 总线式控制器技术手册说明书
– 完整详尽的指令使用说明
说明内容可以依客制需求编写
一键说明
G/M码即显查询功能
指令输入时实时说明 不需记忆复杂的指令格式 加快指令学习速度 除了内建指令,也提供可加入客制指令说明 不需要纸本手册
修改前
修改后
用户开发宏加密功能
仅支持宏程序加密,无法针对已加密的宏程序进行译码
加密
未加密宏 显示方式
解碼
已加密宏程序显示方式
自动刀长量测
内建自动刀长量测宏程序,无需额外开发宏程序 提供人机接口输入刀长量测相关信息,方便客户操作与使用 提供三种对刀方式:单刀单工件、单刀多任务件及多刀多任务
型
• 10.4吋LCD
• 最大控制轴数
4~6轴
• 8.4吋LCD • 最大控制轴数4轴 • 支持高光加工模式
M628A/M668A
M529A
经
• 7吋LCD
济 型
M350A
• 适合产业机械(雕刻机、 弹簧机、点胶机)
钻攻机/中心机/铣床控制器应用领域
钻攻机/中心机/铣床 控制器
中心机 钻攻机
雕铣机
钻攻机/中心机最新控制器与技术发展
研华宝元 产品经理 粘濠伟 2015/01
大纲
1 钻攻机/中心机/铣床控制器 2 全新钻攻机/中心机控制器
钻攻机/中心机/铣床产品Roadmap
~2013
2014
2015
• 8.4吋、10.4吋及
LCD/MDI/OP客制化
• 10.4吋LCD
• 最大控制轴数4~6轴
钻攻机:M688D总线式控制器
LNC I/O 通讯协议
数字式控制器主要优势:
• 支持高速加工且高分辨率回授 • 配线简洁,节省成本 • 可透过控制器直接存取及监控驱动器
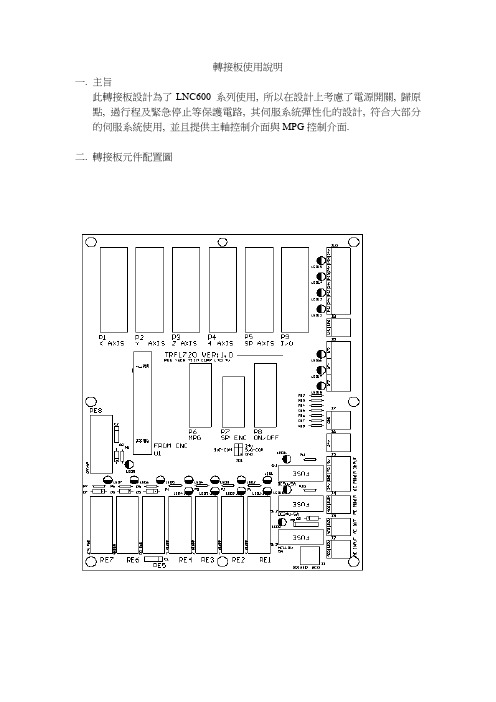
宝元IO转接板使用说明
轉接板使用說明一.主旨此轉接板設計為了LNC600 系列使用, 所以在設計上考慮了電源開關, 歸原點, 過行程及緊急停止等保護電路, 其伺服系統彈性化的設計, 符合大部分的伺服系統使用, 並且提供主軸控制介面與MPG控制介面.二.轉接板元件配置圖三.轉接板接線定義表1. 運動訊號介面接腳定義( U1)註1: PB, /PB : 脈衝B相位輸出註2: PA, /PA : 脈衝A相位輸出註3: A, /A : A 相位訊號輸入註4: B, /B : B 相位訊號輸入註5: C, /C : C 相位訊號輸入註6: EGND : 外部電源接地註7: AGND : 類比訊號接地註8: HS: 歸原點輸入控制信號註9: DACO : 類比訊號輸出註10: NC : 空腳2. 伺服控制介面接腳定義( P1, P2, P3, P4)註1: PB, /PB : 脈衝B相位輸出註2: PA, /PA : 脈衝A相位輸出註3: A, /A : A 相位訊號輸入註4: B, /B : B 相位訊號輸入註5: C, /C : C 相位訊號輸入註6: EGND : 外部電源接地註7: AGND : 類比訊號接地註8: SERON : 伺服致能訊號輸入註9: SVI_CM : 伺服控制訊號輸入共點註10: DACO : 類比訊號輸出註11: ALARM : 伺服警報輸出註12: FGND : 外殼接地註13: NC : 空腳2. 主軸控制訊號介面接腳定義( P5)註1 : ALARM : 主軸警報輸出註2 : IN1V : 主軸定位輸出註3 : RESET : 主軸警報清除輸入註4 : CW : 主軸正轉訊號輸入註5 : CCW : 主軸反轉訊號輸入註6 : PB, /PB : 脈衝控制訊號B相位輸入註7 : PA, /PA : 脈衝控制訊號A相位輸入註8 : SPI_CM : 主軸控制訊號輸入共點註9 : LM0, LM1 : 主軸負載訊號輸出註10 : JOG : 主軸吋動控制訊號輸入註12 : EGND : 外部電源接地註13 : DC24V : 外部DC24V 電源註14 : AGND : 類比訊號接地註15 : DACO : 類比訊號輸出( +10V ~ 0 或+10V ~ -10V) 註16 : FGND : 外殼接地註17 : NC : 空腳3. 手輪控制訊號介面接腳定義( P6)註1 : DC24V : 外部DC24V電源註2 : DC5V : 外部DC5V 電源註3 : EGND : 外部電源接地註4 : A, /A : A 相位訊號輸入註5 : B, /B : B 相位訊號輸入註6 : MPGS1 : 手輪軸向選擇第一軸註7 : MPGS2 : 手輪軸向選擇第二軸註8 : MPGS3 : 手輪軸向選擇第三軸註9 : MPGS4 : 手輪軸向選擇第四軸註10 : MPGR1 : 手輪倍率選擇一註11 : MPGR2 : 手輪軸向選擇第二註12 : FGND : 外殼接地4. 主軸編碼訊號介面接腳定義( P7)註1 : A, /A : A 相位訊號輸入註2 : B, /B : B 相位訊號輸入註3 : C, /C : C 相位訊號輸入註4 : EGND : 外部電源接地註5 : DC5V : 外部DC5V 電源註6 : FGND : 外殼接地5. ON/OFF 控制介面接腳定義( P8 )註1 : OTR1 : 過行程解除接點1註2 : SERON : 伺服致能燈註3 : EGND : 外部電源接地註4 : OFF1 : OFF 開關接點1註5 : EPS1 : 緊急停止開關接點1註6 : ON1 : ON開關接點1註7 : OTR2 : 過行程解除接點2註8 : OFFL : OFF 開關燈接點註9 : OFF2 : OFF 開關接點2註10 : ESP2 : 緊急停止開關接點2 註11 : ON2 : ON開關接點16. I/O 控制介面接腳定義( P9 )註1 : SPI_CM : 主軸控制訊號輸入共點註2 : SPALM : 主軸警報輸出註3 : MPGS4 : 手輪軸向選擇第四軸註4 : ESPAM : 緊急停止警報輸出註5 : XALM : X軸伺服警報輸出註6 : ZALM : Z軸伺服警報輸出註7 : MPGS1 : 手輪軸向選擇第一軸註8 : MPGR1 : 手輪倍率選擇一註9 : SPCW : 主軸正轉訊號輸入註10 : SPRST : 主軸警報清除註11 : IN1V : 主軸定位輸出註12 : MPGS3 : 手輪軸向選擇第三軸註13 : NCRY : 控制器準備完成註14 : YALM : Y軸伺服警報輸出註15 : 4ALM : 第4軸伺服警報輸出註16 : MPGS2 : 手輪軸向選擇第二軸註17 : MPGR2 : 手輪軸向選擇第二註18 : SPCCW : 主軸反轉訊號輸入註19 : SPJOG : 主軸吋動控制訊號輸入註20 : EGND : 外部電源接地四. 系統接線說明 1. 系統接線圖註1 : J1 => DRIVER OUTPUT : 使用在開關伺服及主軸的電源系統, 當發生過行程或緊急停止時, 此接點動作, 關閉電源系統註2 : J2 => AC POWER INPUT : 接入AC110V 或AC220V , 可供DRIVER 和PC 使用註3 : J3 => AC POWER OUTPUT : 使用J2之電源, 可供額外需求使用 註4 : J4 => PC POWER OUTPUT : 使用J2 之電源, 當POWER ON 時, 即提供電源給PC 使用, 當POWER OFF 時, 即關閉PC 電源註5 : J5 => DC POWER INPUT : 提供外部電源系統, 包含DC24V , 5V , 給予 伺服系統, 主軸系統, MPG , 運動控制卡等電源使用.註6 : J6 => DC24V POWER OUTPUT : 使用J5之DC24V 電源, 可供額外需求使用AC POWER INPUT AC POWER OUTPUT PC POWER OUTPUT DC POWER INPUTDC24V POWER OUTPUT EGNDOVERTRA VEL LOADING METER HOME SENSOR DRIVER OUTPUT X SERVO Y SERVO Z SERVO 4 SERVO SPINDLE MPGSPINDLEPOWER ON-OFF/ I/O CONTROL註7 : J7 => EGND : 使用J5之接地, 可供額外需求使用註8 : J8 => OVERTRA VEL : 過行程信號輸入註9 : J9 => LOADING METER : 主軸負載輸出信號註10 : J10 => HOME SERSOR : 歸原點訊號輸入2. 電源開關及緊急迴路系統接線圖ON1ON2OF F1OF F2RE7RE5RE7RE7ON L OF FL+24VGN DES P1ES P2OT1OT2OT R1OT R2RE7NC RDY1NC RDY2RE6GN DSE RONSE RONLES P/OT AL ARMRE8RE6依此圖所示:步驟1 : 在P8 的連接器Pin8 ON1 和Pin15 On2 接上ON的開關,再將ON2 連接到OFF1,此OFF1 再連接到P8 的Pin6,而OFF開關的另一接腳,連接到P8的Pin13。
宝元程式操作说明书3

3.1 G代码概要3.2 定位(G00)3.3 直线切削(G01)3.4 圆弧切削/螺纹切削(G02、G03)3.5 无运动时间(G04)3.6 准确定位校验(G09、G61、G64)3.7 输入可编程数据(G10)3.8 软限程3.9 返回到工作原点(G28)3.10 自工作原点开始的返回(G29)3.11 返回到第2、第3、第4工作原点(G30) 3.12 选择机械坐标系(G53)3.13 选择工件坐标系(G54~G59)3.14 选择追加工件坐标系(G54.1)3.15 坐标旋转功能(G68、G69)3.16 使用测量结果坐标旋转(G168)3.17 绝对位置坐标指令与相对位置坐标指令(G90、G91)3.18 设定工件坐标系(G92)3.19 测量进给(G131、G132)3.20 攻丝转向的转换3.21 (G133、G134)G代码优先顺序3.1 G代码概要G代码以地址字母G后3位内的数字指令此程序段执行何种功能。
G代码有以下2种不同的有效范围。
有*的接通电源时即为常态。
(注)坐标计算功能在第6章说明。
(注)刀具直径补正在第4章说明。
有*的接通电源时即为常态。
(注)刀具长度修正在第4章中说明。
有*的接通电源时即为常态。
(注)固定循环在第5章中说明。
有*的接通电源时即为常态。
(注)G120~G129指令在操作说明书的选购的「自动测量」中说明。
3. 2 定位(G00)从现在位置到终点位置,各轴分别以快速进给方式移动。
也就是说,刀具的运动轨迹不一定是直线。
指令形式没有选购附加轴,而对附加轴发出指令时,发生报警。
刀具轨迹终点起点03L01.ai(注1)限定位置中校验是指确认现在位置是否在指定(终点)位置的范围之内。
(由机械参数设定各轴的限定位置中的范围。
)(注2)由机械参数设定各轴的快速进给速度。
也就是说,不能以F指令来指定快速进给速度。
3. 3 直线切削 (G01)从现在位置到终点位置以指定的进给速度作直线移动指令形式X 、Y 、Z 、A 、B 、C 轴内任意2轴可同时指令。
宝元系统 调机简易说明 车床

新机调机简易说明一:通电(1):通电前确认事项1:所有焊接信号线需正向测量一边,反向测量一边确认信号线接线正确无误2:确认输入总电源电压为为380V(2):通电1:将所有电箱内通电开关关闭2:测量电箱内开关输入及输出(三相AC220V,三相AC380V,AC24V,DC24V)无短路,确认主电路接线无误。
3:将主机后背DC24V输入插头拔除,安川输入三相电源插头拔除,安川开关电源插头拔除。
4:主轴伺服及变频器通电,先送确认变频器电源开关,测量输入端三相电压为AC380V,无缺相后,打开开关确认变频器正常后。
5:安川伺服通电,先确认伺服驱动器电源开关输入端电压为AC220V,无缺相,打开电源开关,测量安川伺服主电源端子三相电压为AC220V,无缺相,再确认安川开关电源电压二相为AC220V。
三轴伺服相同测试方法,确认后断电插入安川电源主电路及开关电源输入端子,通电测试伺服是否正常。
6:系统电源通电:先确认系统电源开关输入电压为二相AC220V,打开电源开关,确认主轴电源输入电压为AC220V,用万用表DC5V,DC12V输出电压正确,再确认到主机DC24V电源端子直流电压是否为DC24V,正负是否正确(可查看主机后背DC24V母座标示)。
以上确认正确后可进行下部操作二:参数汇入功能1:联网上传资料新机过来请将系统参数651号设为1,并关机重启,开机后设定机台IPPARAM→网络设定→设定IP如下范例控制器端IP 172.17.90.9子网屏蔽255.255.255.0预设网关172.17.90.1计算机端IP 172.17.90.10子网屏蔽255.255.255.0预设网关172.17.90.1设定IP后系统关机重启,开启计算机端ReCON – Maintenance联网软件,机台联线设定控制器的IP172.17.90.9,单击联机。
控制器端会出现联机授权画面。
授权后→机台参数→设定参数所在路径→控制器端压下急停→选择要上传的项目→单击上传。
宝元程式操作说明书3
3.1 G代码概要3.2 定位(G00)3.3 直线切削(G01)3.4 圆弧切削/螺纹切削(G02、G03)3.5 无运动时间(G04)3.6 准确定位校验(G09、G61、G64)3.7 输入可编程数据(G10)3.8 软限程3.9 返回到工作原点(G28)3.10 自工作原点开始的返回(G29)3.11 返回到第2、第3、第4工作原点(G30) 3.12 选择机械坐标系(G53)3.13 选择工件坐标系(G54~G59)3.14 选择追加工件坐标系(G54.1)3.15 坐标旋转功能(G68、G69)3.16 使用测量结果坐标旋转(G168)3.17 绝对位置坐标指令与相对位置坐标指令(G90、G91)3.18 设定工件坐标系(G92)3.19 测量进给(G131、G132)3.20 攻丝转向的转换3.21 (G133、G134)G代码优先顺序3.1 G代码概要G代码以地址字母G后3位内的数字指令此程序段执行何种功能。
G代码有以下2种不同的有效范围。
有*的接通电源时即为常态。
(注)坐标计算功能在第6章说明。
(注)刀具直径补正在第4章说明。
有*的接通电源时即为常态。
(注)刀具长度修正在第4章中说明。
有*的接通电源时即为常态。
(注)固定循环在第5章中说明。
有*的接通电源时即为常态。
(注)G120~G129指令在操作说明书的选购的「自动测量」中说明。
3. 2 定位(G00)从现在位置到终点位置,各轴分别以快速进给方式移动。
也就是说,刀具的运动轨迹不一定是直线。
指令形式没有选购附加轴,而对附加轴发出指令时,发生报警。
刀具轨迹终点起点03L01.ai(注1)限定位置中校验是指确认现在位置是否在指定(终点)位置的范围之内。
(由机械参数设定各轴的限定位置中的范围。
)(注2)由机械参数设定各轴的快速进给速度。
也就是说,不能以F指令来指定快速进给速度。
3. 3 直线切削 (G01)从现在位置到终点位置以指定的进给速度作直线移动指令形式X 、Y 、Z 、A 、B 、C 轴内任意2轴可同时指令。
IO扩展卡使用说明书
CHV系列模块化矢量型变频器选配件IO扩展卡使用说明书1.型号与规格1.1型号说明CHV系列变频器的IO扩展卡型号为VHV00IO,为CHV系列变频器提供更多的输出、输出接线端子,方便用户特殊的控制需要。
1.2 外型示意图2、IO扩展卡端子说明端子名称 端子用途及说明S6~S8 开关量输入端子,与PW和COM形成光藕隔离输入输入电压范围:9~30V输入阻抗:3.3KΩHDI2 高速脉冲或开关量输入,与PW和COM形成光藕隔离输入脉冲输入频率范围:0~50KHz输入电压范围:9~30V输入阻抗:1.1KΩCOM 为+24V或者外部电源的公共端。
AI3 模拟量输入,电压范围:-10V~10V 输入阻抗:10KΩAI4 模拟量输入,电压(0~10V)/电流(0~20mA)通过J1可选。
输入阻抗:10KΩ(电压输入)/250Ω(电流输入)Y2 开路集电极输出端子,其对应公共端为CME。
外接电压范围:0~24V输出电流范围:0~50mACME2 开路集电极输出的公共端。
AO2 模拟量输出端子,可通过跳线J2选择电压或电流输出。
输出范围:电压(0~10V)/电流(0~20mA)RS485+,RS485- RS485串行通讯RO3A、RO3B、RO3C RO3继电器输出,RO3A公共端,RO3B常闭,RO3C常开触点容量:AC250V/3A,DC30V/1A3、跳线说明跳线名称 跳线说明J1 电压(0~10V)/电流(0~20mA)输入切换跳线。
1(V)、2(GND)短接为电压输入;2(GND)、3(I)短接为电流输入J2 电压(0~10V)/电流(0~20mA)输出切换跳线。
1(V)、2(GND)短接为电压输出;2(GND)、3(I)短接为电流输出S1 RS485通讯口终端器设置选择拨码开关ON:采用终端器;拨码开关OFF:不用终端器当该RS485通讯端口位于RS485通讯网络电缆的末端时,需使用终端器4、端子的排列顺序示意图5、有关RS485通讯功能部分,请参考《CHV系列变频器通讯卡使用说明书》。
宝元系统M600I操机步骤
LNC-M600I操机步骤在操机前,请认真阅读下面的操作步骤,如果有疑问请迅速联系我公司,否则由于误操作造成的故障,我们将根据故障的轻重由你们负部分或全部的责任。
一、开机1、在开机之前要先检查机床状况有无异常,冷油机是否准备好,润滑油是否足够,气压压力是否足够等等,如一切正常,即可开机。
2、先按下急停开关,开稳压器、冷油(水)机等辅助设备电源开关,然后合上机床总电源开关。
3、按下开机(OP面板右下角绿色键) 开关,等待数秒后机床启动完成,松开急停开关。
二、回原点进入系统以后,在模式选择(MODE SELECT)中选择原点复归模式(HOME/ZRN),再按程式启动(CYCLE START)键(OP面板左下角绿色键)即可。
注意:为了保护机床和误操作,开机应该直接回原点,不要移动轴。
假如开机以后不回原点,系统会报开机尚未回原点的警告,只有执行回原点操作才能消除,而且在未归原点状态下只有手轮可让机床移动,其它模式禁止使用。
三、安装工件、刀具装好刀具,再在“手动”模式下,按下“F1”按钮,即可将刀柄装入主轴。
注意:一定要在“手动模式”下,才能装刀或卸刀;“手动模式”是指手动连续进给(JOG)、手动快速连续进给(RAPID)、原点复归模式(HOME/ZRN)、手轮操作模式(MPG/HANDLE);任意选择这四种模式中任一种都可以。
四、设置加工坐标原点和对刀对于分中的方法,本系统提供两种绝然不同,各有所长,都异常方便的分中方法。
方法一:(适用范围:每换一次刀就对一次刀;使用时先分中,后对刀。
)在“OFFSET”菜单下选择“坐标系”,即可进入分中界面。
根据你加工毛胚的需要,选择“矩形中心”、“圆形中心”或“教导输入”。
下面以“矩形中心”举个例子:点击“矩形中心”进入对应的分中界面以后,通过方向键“←”、“→”选择你需要的分中坐标G54、G55等等。
接着:a、移动X轴,使刀具或分中棒与平行于Y轴的一工件边相触,然后按下“X1设入”;b、移动X轴,使刀具或分中棒与平行于Y轴的另一工件边相触,然后按下“X2设入”;c、移动Y轴,使刀具或分中棒与平行于X轴的一工件边相触,然后按下“Y1设入”;d、移动Y轴,使刀具或分中棒与平行于X轴的另一工件边相触,然后按下“Y2设入”;e、刷Z轴平面(即加工坐标原点Z0),选择“手动资料输入模式(MDI)”,输入“G36”,按右边的“登录”,并按“程式启动”键,机器自动完成取基准面的操作。
宝元数控LNC-M515i中文操作手册

LNC-M515i操 作 手 冊2010/8 版本:V04.00.000(4408210083)Leading Numerical ControllerLNC Technology Co., Ltd.寶元數控精密股份有限公司 LNC Technology Co., Ltd.1LNC-M515i目錄目 1錄CNC 操作 ...................................................................................................... 11.1 1.2 1.3 操作裝置種類 ...................................................................................................................................................... 1 操作裝置介紹 ...................................................................................................................................................... 2 畫面及功能說明 .................................................................................................................................................. 7 1.3.1 1.4 顯示畫面佈置 ........................................................................................................................................ 7座標機能(POS) .............................................................................................................................................. 9 1.4.1 1.4.2 1.4.3 1.4.4 檔案總管 ............................................................................................................................................. 28 程式核對 ............................................................................................................................................. 40 手動輸入 ............................................................................................................................................. 43 通訊連線(RS232) ........................................................................................................................... 491.5補正機能(OFFSET) ...................................................................................................................................... 51 1.5.1 1.5.2 1.5.3 1.5.4 1.5.5 刀具補正 ............................................................................................................................................. 51 溫昇補償 ............................................................................................................................................. 52 巨集變數 ............................................................................................................................................. 53 座標系設定.......................................................................................................................................... 55 刀具登錄 ............................................................................................................................................. 601.6GRAPH 機能(GRAPH) ................................................................................................................................. 61 1.6.1 1.6.2 1.6.3 功能簡介 ............................................................................................................................................. 61 路徑顯示 ............................................................................................................................................. 61 視窗定義 ............................................................................................................................................. 621.7診斷機能(DGNOS) ....................................................................................................................................... 64 1.7.1 1.7.2 1.7.3 1.7.4 1.7.5 1.7.6 1.7.7 警報內容 ............................................................................................................................................. 64 IOCSA ................................................................................................................................................ 67 MLC2.................................................................................................................................................. 68 系統資訊 ............................................................................................................................................. 71 加工參數畫面 ...................................................................................................................................... 73 系統更新 ............................................................................................................................................. 74 循圓檢測 ............................................................................................................................................. 841.8PARAM 參數 ..................................................................................................................................................... 86 1.8.1 1.8.2 1.8.3 系統參數 ............................................................................................................................................. 86 用戶參數 ............................................................................................................................................. 87 使用期限 ............................................................................................................................................. 88寶元數控精密股份有限公司 LNC Technology Co., Ltd.ILNC-M515i目錄1.8.4 1.8.5 1.8.6 網路設定 ............................................................................................................................................. 89 【變更密碼】 ...................................................................................................................................... 94 切換用戶 ............................................................................................................................................. 952控制面板操作 .............................................................................................. 972.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 操作面板 ........................................................................................................................................................... 97 LED 燈號(LED SIGNAL) ............................................................................................................................. 98 模式選擇(MODE SELECT) .......................................................................................................................... 98 軸向選擇(AXIS SELECTION) .................................................................................................................... 101 輔助功能鍵 ..................................................................................................................................................... 102 緊急停止鍵(EMG-STOP) ........................................................................................................................... 104 程式啟動(CYCLE START)& 程式暫停(FEED HOLD)............................................................................ 105 主軸操作鍵(SPINDLE ROTATION) & 主軸速率調整鈕(SPINDLE SPEED ADJUSTMENT SWITCH) .. 106 快速進給 & 寸動進給率調整鈕功能區 ............................................................................................................ 1073RS232 傳輸軟體使用說明章節 .................................................................. 1093.1 3.2 3.3 3.4 傳輸線準備 ..................................................................................................................................................... 109 PC 端安裝(使用寶元數控所提供 ReCON-232 軟體).........................................................................................110 NC 端使用說明 ................................................................................................................................................112 通訊連線(RS232)-【 DNC 檔案上傳下載傳輸功能 】 .............................................................................. 126 3.4.1 3.4.2 3.4.3 3.4.4 3.5 路徑程式下載儲存作業(使用 ReCON 軟體)....................................................................................... 126 路徑程式上傳儲存作業(使用 ReCON 軟體)....................................................................................... 129 路徑程式下載儲存作業(使用一般通用軟體)....................................................................................... 132 路徑程式上傳儲存作業(一般通用軟體).............................................................................................. 136USB 轉 RS232 接頭注意事項與設定方式 ....................................................................................................... 1414系統警報(Alarm)及警告(Warning).................................................. 1434.1 4.2 4.3 OP 操作相關警報 ........................................................................................................................................... 143 INT 解譯相關警報 .......................................................................................................................................... 146 MOT 運動相關警報 ........................................................................................................................................ 155II寶元數控精密股份有限公司 LNC Technology Co., Ltd.LNC-M515iCNC 操作1 CNC 操作1.1 操作裝置種類就操作者所操作的面板來說,區分為 MDI 資料輸入面板及 OP 操作面板。
宝元系统简易操作指南
宝元系统简易操作指南宝元簡易操作步驟一:分中(1)工件矩形分中(四邊形)按OFFSET→按座標系→選擇G54-G59坐標→按矩形中心→靠工件左邊→按X1設入→靠工件右邊→按X2設入→靠工件前邊→按Y1設入→靠工件後邊→按Y2設入→按返回→OK(2)工件圓形分中(圓柱形)按OFFSET→按座標系→選擇G54-G59坐標→按圓形中心→靠圓形一點(第一點)→按P1設入→第一點移動到120度→按P2設入→第一點移動到240度→按P3設入→按返回→OK(3)工件分中(直接抄工件位置機械坐標X軸)按OFFSET→按座標系→選擇G54-G59坐標→按教導輸入→確認X軸中心位置→按X1設入→按返回→OK(4)工件分中(直接抄工件位置機械坐標Y軸)按OFFSET→按座標系→選擇G54-G59坐標→按教導輸入→確認Y軸中心位置→按Y1設入→按返回→OK(5)工件分中(直接抄工件位置機械坐標Z軸)按OFFSET→按座標系→選擇G54-G59坐標→按教導輸入→確認Z軸中心位置→按Z1設入→按返回→OK二:Z軸刀補設定(1)對刀儀自動抄數(1號刀為例)量工件到對刀儀落差:每一個件第一次需要按此部操作,剎工件平面→按MDI→按PROG→輸入G36→按登錄→按啟動加工→執行完成後及OK自動對刀:換好刀→按MDI→按PROG→輸入M36T1→按登錄→按啟動加工→執行完成後及OK備注:自動對刀需要確認G54-G59確認Z軸坐標為0,流程→按OFFSET→按座標系→選擇對應坐標系→如為0返回→不為0設入Z0→OK再程序裡加入G43H1及可調出刀補資料。
(2)直接設入Z軸坐標按OFFSET→按座標系→選擇對應坐標系→設入Z0→OK三:自動加工(1)開檔案:按EDIT→按PROG→按檔案總管→選擇程序→按回車→檔案已開啟OK(2)自動加工:按EME→按SOFTPL→按手輪空跑(燈亮)→按啟動加工→確認程序及動作正常後→關手輪空跑(燈滅)四:手動輸入(M3S1500開主軸為例)按MDI→按PROG→輸入M3S1500→按登錄→按啟動加工→執行完成後OK。
宝元程式操作说明书 (2)
.1.1 程序的种类和构成1.2 程序段的构成1.3 单词的构成1.4 数值指令1.5 编号1.6 可选择程序段的程序跳过1.7 控制脱开接入功能1.1 程序的种类和构成程序分为主程序和子程序2种(1)主程序加工一个零件的程序。
在主程序中调取子程序,可提高制作程序的效率。
结束主程序用M02(或M30)。
主程序(2)子程序由主程序或其他子程序调取使用。
最后用M99结束子程序。
子程序1.2 程序段的构成程序由数个指令构成。
每一个指令称为程序段。
程序段由1个或数个单词构成。
每个程序段之间以程序段结束代码(EOB)分开。
(本书说明中,程序段结束代码以“;”表示。
)···;NO001G92×100 ;•···;M02 ;程序段程序段(注1)程序段结束代码在ISO码是[LF] OA(16位数)EIA码是[CR] 80(16位数)(注2)1个程序段的最多字数是128个字母。
1.3单词的构成单词由如下所示地址及几位数的数值构成。
(数值前可加+,-符号。
)X -1000地址数值单词(注1)地址由英文字母(A~Z)中的一个字母表示。
(注2)地址字母「O」除备注以外不使用。
1.4数值指令(1)小数点指令数值的指令方法有以下2种,由参数1设定。
指令方法1 (基本)指令方法2 (最小)(注)用户参数……参照操作说明书(2)地址的数值指令范围最大位数为9位。
指令中小于最小设定单位部分,自动削除。
1.5 编码指在各程序段的位置字母N后可加上编码(1~9999)。
利用编码可使用编码搜索及重新开始功能。
指令形式i )在N后接数字(0~9)表示。
i i )编码最多以4位数指定。
(注1)不要用NO。
(注2)编码写在程序段的前面。
NO 1 0 0 G 9 0 ×1 0 0 ;如在程序段的前面有可选择跳过程序段(’/’)指令的情况下,编码写在其前后都可以。
NO 1 0 0 /G 9 0 ×1 0 0 ;或者/NO 1 0 0 G 9 0 ×1 0 0 ;(注3)编码的顺序可任意定,不是连续的数字也可以。
宝元操作说明新版
宝元操作说明新版1.1宝元528(5800)系统⾯板1.2功能区群组1.3模式功能区1.4按键区2宝元528(5800)系统操作使⽤2.1⼀般操作流程:1)开机---回机床原点---⼯件分中----对⼑-----拷贝加⼯程序----选择程序进⾏开档---切换到⾃动模式(⾃动模式)---⼿轮模拟(F2)-----启动(CYCLE START)2)回原点:ZRN---启动(CYCLE START)(直到⾯板上HOME指⽰类亮为⽌,表⽰回原点完成3)分中:补偿----座标系设定----矩形中⼼---设X1,X2,Y1,Y2,(为四⾯分中)对⼑:补偿---座标系设定----⼀般设定---设Z。
5)拷贝程序:编辑模式---PROG—档案总管---复制档案----选择E或Z盘----选择要加⼯的⽂件名----确定⽂件名----将加⼯⽂件进⾏开档。
2.2常⽤命令:1)移动⾄要加⼯⼯件的中⼼点(下例为:G54座标系来说明的)按下《⼿动输⼊》输⼊“G54G0X0Y0”--按下《登录》--按下《启动(CYCLE START)》2)输⼊主轴转速⼿动输⼊—输⼊“M3S10000”---登录----启动(CYCLE START);M3表⽰主轴正转,S10000表⽰转速值为每分钟10000转。
3)加⼯前座标偏移(机床重启后数值不变,应注意在加⼯另⼀⼯序时改为0)补偿---座标系设定----移动光标⾄0座标系----输⼊您想要偏移的轴及值---确定(按回车键)(例如:输⼊“Z10”,表⽰在G54座标系的基础上将Z轴抬⾼10MM。
)4)加⼯中偏移座标(⼿轮中断,机床重启后⾃动归0)按下程序暂停(FEED HOLD,灯亮)---F3(⼿轮中断)---按下座标---按下《⼿轮中断》----⽤⼿轮移动你想要偏移的轴和值。
注:A:未重新启动时,这偏移值仍然有效,在加⼯另⼀⼯序时应⽤⼿轮中断功能将该⼿轮移动值移动为零。
B:⼿轮中断有模式控制锁定的,在⾃动模式(⾃动模式)下的程序暂停的情形下,按下操作⾯板上的F3才能启动⼿轮中断功能(⼿轮插⼊功能)。
大族激光 EMCC卡IO转接板使用说明
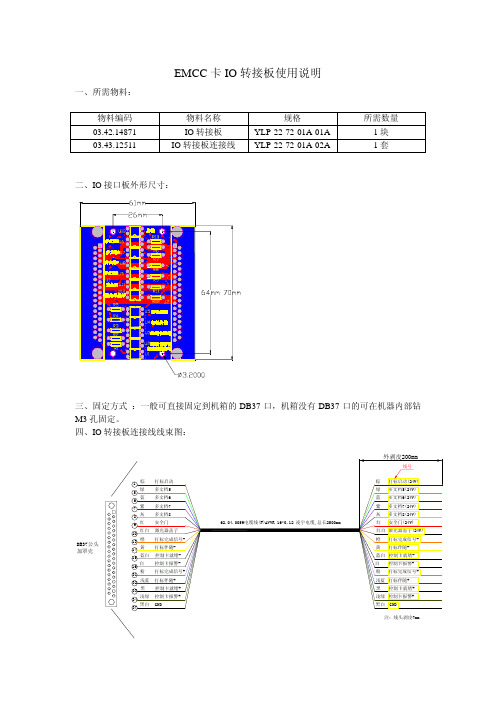
EMCC卡IO转接板使用说明
一、所需物料:
物料编码物料名称规格所需数量
03.42.14871 IO转接板 YLP-22-72-01A-01A1块
03.43.12511 IO转接板连接线 YLP-22-72-01A-02A1套
二、IO接口板外形尺寸:
三、固定方式:一般可直接固定到机箱的DB37口,机箱没有DB37口的可在机器内部钻M3孔固定。
四、IO转接板连接线线束图:
加罩壳
五、连接方式:
六、IO 接口板包含信号(脚位定义):
DB37
1打标启动(24V)5多文档5(24V)6多文档6(24V)7多文档7(24V)10激光器盖子(24V)13
打标完成信号-14
打标伴随-16
控制卡报警-31
打标完成信号+32打标伴随+34控制卡报警+37
GND
黑白浅绿红
粉白黄橙黑
紫蓝绿棕15
控制卡就绪-33控制卡就绪+
蓝白红白
浅蓝8多文档8(24V)灰9
安全门(24V)
七、信号说明:客户输入全为24V 启动,输出全为NPN 型干接点信号,客户所需信号需包
含在以上信号中,否则需定制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轉接板使用說明一.主旨此轉接板設計為了LNC600 系列使用, 所以在設計上考慮了電源開關, 歸原點, 過行程及緊急停止等保護電路, 其伺服系統彈性化的設計, 符合大部分的伺服系統使用, 並且提供主軸控制介面與MPG控制介面.二.轉接板元件配置圖三.轉接板接線定義表1. 運動訊號介面接腳定義( U1)註1: PB, /PB : 脈衝B相位輸出註2: PA, /PA : 脈衝A相位輸出註3: A, /A : A 相位訊號輸入註4: B, /B : B 相位訊號輸入註5: C, /C : C 相位訊號輸入註6: EGND : 外部電源接地註7: AGND : 類比訊號接地註8: HS: 歸原點輸入控制信號註9: DACO : 類比訊號輸出註10: NC : 空腳2. 伺服控制介面接腳定義( P1, P2, P3, P4)註1: PB, /PB : 脈衝B相位輸出註2: PA, /PA : 脈衝A相位輸出註3: A, /A : A 相位訊號輸入註4: B, /B : B 相位訊號輸入註5: C, /C : C 相位訊號輸入註6: EGND : 外部電源接地註7: AGND : 類比訊號接地註8: SERON : 伺服致能訊號輸入註9: SVI_CM : 伺服控制訊號輸入共點註10: DACO : 類比訊號輸出註11: ALARM : 伺服警報輸出註12: FGND : 外殼接地註13: NC : 空腳2. 主軸控制訊號介面接腳定義( P5)註1 : ALARM : 主軸警報輸出註2 : IN1V : 主軸定位輸出註3 : RESET : 主軸警報清除輸入註4 : CW : 主軸正轉訊號輸入註5 : CCW : 主軸反轉訊號輸入註6 : PB, /PB : 脈衝控制訊號B相位輸入註7 : PA, /PA : 脈衝控制訊號A相位輸入註8 : SPI_CM : 主軸控制訊號輸入共點註9 : LM0, LM1 : 主軸負載訊號輸出註10 : JOG : 主軸吋動控制訊號輸入註12 : EGND : 外部電源接地註13 : DC24V : 外部DC24V 電源註14 : AGND : 類比訊號接地註15 : DACO : 類比訊號輸出( +10V ~ 0 或+10V ~ -10V) 註16 : FGND : 外殼接地註17 : NC : 空腳3. 手輪控制訊號介面接腳定義( P6)註1 : DC24V : 外部DC24V電源註2 : DC5V : 外部DC5V 電源註3 : EGND : 外部電源接地註4 : A, /A : A 相位訊號輸入註5 : B, /B : B 相位訊號輸入註6 : MPGS1 : 手輪軸向選擇第一軸註7 : MPGS2 : 手輪軸向選擇第二軸註8 : MPGS3 : 手輪軸向選擇第三軸註9 : MPGS4 : 手輪軸向選擇第四軸註10 : MPGR1 : 手輪倍率選擇一註11 : MPGR2 : 手輪軸向選擇第二註12 : FGND : 外殼接地4. 主軸編碼訊號介面接腳定義( P7)註1 : A, /A : A 相位訊號輸入註2 : B, /B : B 相位訊號輸入註3 : C, /C : C 相位訊號輸入註4 : EGND : 外部電源接地註5 : DC5V : 外部DC5V 電源註6 : FGND : 外殼接地5. ON/OFF 控制介面接腳定義( P8 )註1 : OTR1 : 過行程解除接點1註2 : SERON : 伺服致能燈註3 : EGND : 外部電源接地註4 : OFF1 : OFF 開關接點1註5 : EPS1 : 緊急停止開關接點1註6 : ON1 : ON開關接點1註7 : OTR2 : 過行程解除接點2註8 : OFFL : OFF 開關燈接點註9 : OFF2 : OFF 開關接點2註10 : ESP2 : 緊急停止開關接點2 註11 : ON2 : ON開關接點16. I/O 控制介面接腳定義( P9 )註1 : SPI_CM : 主軸控制訊號輸入共點註2 : SPALM : 主軸警報輸出註3 : MPGS4 : 手輪軸向選擇第四軸註4 : ESPAM : 緊急停止警報輸出註5 : XALM : X軸伺服警報輸出註6 : ZALM : Z軸伺服警報輸出註7 : MPGS1 : 手輪軸向選擇第一軸註8 : MPGR1 : 手輪倍率選擇一註9 : SPCW : 主軸正轉訊號輸入註10 : SPRST : 主軸警報清除註11 : IN1V : 主軸定位輸出註12 : MPGS3 : 手輪軸向選擇第三軸註13 : NCRY : 控制器準備完成註14 : YALM : Y軸伺服警報輸出註15 : 4ALM : 第4軸伺服警報輸出註16 : MPGS2 : 手輪軸向選擇第二軸註17 : MPGR2 : 手輪軸向選擇第二註18 : SPCCW : 主軸反轉訊號輸入註19 : SPJOG : 主軸吋動控制訊號輸入註20 : EGND : 外部電源接地四. 系統接線說明 1. 系統接線圖註1 : J1 => DRIVER OUTPUT : 使用在開關伺服及主軸的電源系統, 當發生過行程或緊急停止時, 此接點動作, 關閉電源系統註2 : J2 => AC POWER INPUT : 接入AC110V 或AC220V , 可供DRIVER 和PC 使用註3 : J3 => AC POWER OUTPUT : 使用J2之電源, 可供額外需求使用 註4 : J4 => PC POWER OUTPUT : 使用J2 之電源, 當POWER ON 時, 即提供電源給PC 使用, 當POWER OFF 時, 即關閉PC 電源註5 : J5 => DC POWER INPUT : 提供外部電源系統, 包含DC24V , 5V , 給予 伺服系統, 主軸系統, MPG , 運動控制卡等電源使用.註6 : J6 => DC24V POWER OUTPUT : 使用J5之DC24V 電源, 可供額外需求使用AC POWER INPUT AC POWER OUTPUT PC POWER OUTPUT DC POWER INPUTDC24V POWER OUTPUT EGNDOVERTRA VEL LOADING METER HOME SENSOR DRIVER OUTPUT X SERVO Y SERVO Z SERVO 4 SERVO SPINDLE MPGSPINDLEPOWER ON-OFF/ I/O CONTROL註7 : J7 => EGND : 使用J5之接地, 可供額外需求使用註8 : J8 => OVERTRA VEL : 過行程信號輸入註9 : J9 => LOADING METER : 主軸負載輸出信號註10 : J10 => HOME SERSOR : 歸原點訊號輸入2. 電源開關及緊急迴路系統接線圖ON1ON2OF F1OF F2RE7RE5RE7RE7ON L OF FL+24VGN DES P1ES P2OT1OT2OT R1OT R2RE7NC RDY1NC RDY2RE6GN DSE RONSE RONLES P/OT AL ARMRE8RE6依此圖所示:步驟1 : 在P8 的連接器Pin8 ON1 和Pin15 On2 接上ON的開關,再將ON2 連接到OFF1,此OFF1 再連接到P8 的Pin6,而OFF開關的另一接腳,連接到P8的Pin13。
步驟2 : 將ON的指示燈一端接到ON2和OFF1的連接處,另一端接到P8的Pin5 外部接地。
步驟3 : 將OFF的指示燈一端接到P8的Pin12,另一端接到P8的Pin5外部接地。
步驟4 : 若有過行程的開關時,請接到J8的端子台, 依序接X軸、Y軸和Z軸,若不使用過行程保護時,必須要將此端子台短路,或任一軸不使用過程程保護時,須將那一軸短路。
步驟5 : 將緊急停止開關( 使用常閉接點)的一端EPS1 接到P8的Pin7。
另一端EPS2 接到P8的Pin14。
步驟6 : 將P9的Pin5 和 P9的Pin18 接到繼電器的接點,當數值控制器完成起動程序時,將此繼電器致能,代表數值控制器已經準備完成。
如此伺服 致能才能完成。
3. 歸原點及過行程接線圖3.1 歸原點接線圖將第一軸S1的歸原點開關接到J10的Pin 1 和 Pin 2 , 依此類推第二軸, 第三軸和第四軸, 當有歸原點開關動作時, 相對的LED 會亮, 可知歸原點開關是否動作. 如下圖接法J10CON812345678S1S2S3S43.2 過行程接線圖OT XOT YOT ZOT 1OT 2將第一軸過行程開關( 必須是常閉接點) 接到J8的Pin 1和 Pin2, 依據此原則接第二軸, 第三軸。
注意若沒有使用到的軸項必須短路, 否則無法動作, 如下圖所示4. 伺服控制信號電源特性設定 ( JP1)本轉接板, 可以依據使用者使用伺服馬達控制信號特性設定控制介面電源信號可由JP1設定伺服控制電氣特性, 例如三菱伺服馬達MR-J2S 輸入控制為不帶電接點( 乾接點), 輸出控制為外部電源輸入, 所以JP1之SVI_COM 開路, SVO_COM 短路到DC24V 。
例如使用PANASONIC A 系列伺服馬達, 輸入控制信號為GND, 輸出控制信號為VDC ( DC12~24V), 所以JP1之SVI_COM 短路到 GND, SVIO_COM 短路到DC24V .S1J8CON6123456S2S3OT Z OT Y OT 1OT X OT 2。