第5章 一维搜索
第一章 优化设计概述

绪论
二、从传统设计到优化设计:
优化设计与传统设计相比有以下三点特点:
• 设计的思想是最优设计,需要建立一个能够正确 反映实际设计问题的优化数学模型; • 设计的方法是优化方法,一个方案参数的调整是 计算机沿着使方案更好的方向自动进行的,从而选 出最优方案; • 设计的手段是计算机,由于计算机的运算速度快, 分析和计算一个方案只需要几秒甚至千分之一秒, 因而可以从大量的方案中选出“最优方案”。
由图中数据得:D*=6.43cm,h*=76cm,在极值点处m*=8.47kg
第一章 优化设计概述
第二节 机械优化设计问题实例
要用薄钢板制造一体积为5m3 的长方形汽车货箱(无上盖), 其长度要求不超过4m.问如何设计可使耗用的钢板表面积最小?
分析:
(1)目标:用料最少,即货箱的表面积最小。 (2)设计参数确定:长x1 、宽x2 、高x3; (3)设计约束条件: (a)体积要求 (b)长度要求
1 2 2
θ
θ
L
A 2 (T D 2 ) 4 8 A是钢管截面面积A ( R 2 r 2 ) TD (R4 r 4 ) r和R分别是钢管的内半径和外半径 D=r+R而T=R-r
第一章 优化设计概述
第一节 人字架的优化设计
F1 F ( B h ) A TDh Fe 2 E (T 2 D 2 ) 钢管的临界应力是 e A 8( B 2 h 2 ) 钢管所受的压应力是
第一章 优化设计概述
第三节 优化设计问题的数学模型
一个优化设计问题一般包括三个部分: 1.需要合理选择的一组独立参数,称为设计变量; 2.需要最佳满足的设计目标,这个设计目标是设计变量的 函数,称为目标函数; 3.所选择的设计变量必须满足一定的限制条件,称为约束 条件(或称设计约束)。
一维搜索-最优化方法

������2=0.538, ƒ2 = 1.751, ������1=������3+������������23 ������3 − ������3 =0.231
则ƒ2 = 1.822, ƒ1 > ƒ2,故得新区间为 [������4,������4]=[0.231, 0.846]
第五次迭代:
取������2=0.538, ƒ2 = 1.751, ������1=������2 − 0.1 ������4 − ������4 =0.477
问题3:按什么方式取点,求n次函数值之后多长的原始区间 缩短为最终区间长度为1?
• 1:Fibonacci数列:
• F0 =1 ;
F1 = 1 ;
F 迭代公式:Fn2 = Fn1 + n
•
;n 非负整数
n
0
1
2
3
4
5
6
7
…..
1
1
23ຫໍສະໝຸດ 5813 21 …..
Fn
设Ln表示试点个数为n,最终区间长度为1时的原始区间[a ,b] 的最大可能的长度,现在找出Ln的一个上界。设最初的两个 试点为x1,x2,且且x1< x2 。如果极小点位于[a , x1]内,则我们 至多还有n-2个试点,因此x1-a≤Ln-2;如果极小点位于[x1 , b] 内,则包括x2在内还可以有n-1个试点,因此b- x1≦Ln-1。
t (1中)任若设取[两 (a点t,1b)]t1<是<单(tt2谷2) ,函,则数那搜么(索t有) 区的:间一可个缩已短知为搜*[索a区, 间t2],.在[a,b]
( 2 ) 若 (t1 ) (t2 ),则搜索区间可缩短为[ t1,b]
《一维搜索方法》课件

02
线性搜索
线性搜索的定义
线性搜索是一种基本的搜索算法,它 从列表的第一个元素开始,逐个检查 每个元素,直到找到目标元素或遍历 完整个列表。
在线性搜索过程中,我们假设列表中 的元素是按顺序排列的,并且我们不 知道目标元素的确切位置,只知道它 存在于列表中。
线性搜索的步骤
初始化
选择一个起始位置,通常为列表的第一个元素。
抛物线搜索的步骤
3. 比较中间元素与目标值
2. 计算当前区间的中间元 素。
1. 初始化当前搜索区间为 整个数组。
01
03 02
抛物线搜索的步骤
01 如果中间元素等于目标值,返回该位置。
02
如果目标值小于中间元素,将左半部分区 间作为新的当前区间。
03
如果目标值大于中间元素,将右半部分区 间作为新的当前区间。
04
4. 重复步骤2和3,直到找到目标值或当前 区间为空。
抛物线搜索的时间复杂度
最坏情况下,抛物线搜索的时间复杂度为O(n),其中n为数 组长度。
平均情况下,由于每次比较都可以将搜索区间缩小一半,因 此时间复杂度为O(log n)。
THANKS
THANK YOU FOR YOUR WATCHING
的单峰函数。
一维搜索方法的重要性
解决实际问题
一维搜索方法广泛应用于各种实 际问题中,如参数优化、函数逼 近、插值等。
算法基础
一维搜索方法是许多算法的基础 ,如梯度下降法、牛顿法等都需 要用到一维搜索方法来寻找迭代 步长。
理论分析
一维搜索方法在数学分析中也有 重要应用,如中值定理、单调函 数性质等都需要用到一维搜索方 法。
常用的一维搜索方法
线性搜索
工程优化方法第1章

一致性 5 )灵敏性分析:参数扰动对解的影响情况 6 )解的实施:回到实践中 7 )后评估:考察问题是否得到完满解决
工程优化方法第1章
§3 基本概念 1、最优解与极值点
p m x iR n n fx s.t. gix0
设 f: D→ R 1( D R)n (D-定义域) (1) x 为D的一个内点; (2) f(x)在 x 可微; (3) x 为f(x)的极值点;
则: f x 0
工程优化方法第1章
Th3(充分条件) : 设 f: D→ R(1 D )Rn(D-定义域)
(1) x 为D的一个内点; (2) f(x)在 x 处二次可微;
2 f
x12
2 f x2x1
2 f
x
n
x1
2 f x1x2
2 f x22
2 f x1x3 2 f x2x3
2 f
2 f
xnx2 xnx3
2 f
x1xn
2 f
x2xn
2 f
xn2
线性函数:f (x) = cTx + b , 2f (x) = 0
二次函数:f (x) = (1/2) xTQx + cTx + b,
则 x ≤ 0, ≥ 0 . (2)若 xTy ≤ , y L Rn ,
则 x L, ≥ 0 .(特别, L=Rn时,x =0)
定理的其他形式:
“若 xTy ≤ , yRn 且 y ≤ 0,则 x ≥ 0, ≥ 0 .” “若 xTy ≥ , yRn 且 y ≥ 0,则 x ≥ 0, ≤ 0 .” “若 xTy ≥ , yRn 且 y ≤ 0,则 x ≤ 0, ≤ 0 .” “若 xTy ≥ , y L Rn , 则 x L, ≤ 0 .”
一维搜索

非线性规划非线性规划问题是比线性规划问题更一般的数学规划问题,它的目标函数或约束函数中至少含有一个非线性函数,非线性规划就是研究非线性规划问题的有关理论和方法的学科。
非线性规划是运筹学的一个重要分支,它在军事、经济、工程、管理以及最优设计等方面都有着广泛的应用。
本部分介绍无约束非线性规划和约束非线性规划的基本理论和方法。
第三章 无约束优化方法无约束非线性规划问题是指可行域是整个决策空间的非线性规划问题。
本章首先分析无约束非线性规划问题的一阶和二阶最优性条件,包括必要条件和充分条件,然后讨论一维搜索问题,最后介绍无约束优化的求解方法,包括最速下降法,Newton 法共轭梯度法和拟Newton 法等。
补充:最优性条件现在考虑无约束非线性规划问题)(min x xf (UNP)其中决策变量n R ∈x ,目标函数1:R R f n →。
我们先引进下降方向的概念,并研究其充分条件,由此建立(UNP)的一阶和二阶最优性条件。
补.1 下降方向定义补.1 设函数1:R R f n →,n R ∈x ,nR ∈s 是非零方向。
若存在δ>0,使()(f f λ+<x s x ,(0,)λδ∀∈则称s 是f 在x 处的下降方向。
注补.1 设*x 是(UNP)的局部最优解,则f 在*x 处不存在下降方向。
定理补.1 设)(x f 在x 处可微,nR ∈s 是非零方向。
若()Tf ∇x s <0,则s 是f 在x 处的下降方向。
证明:对任意的λ>0,因为)(x f 在x 处可微,故由)(x f 在x 处的一阶Taylor 展开式知,()()()()()[()()/]T T f f f o f f o λλλλλλ+=+∇+=+∇+x s x x s x x s (补.1)根据条件()Tf ∇x s <0和0()lim0o λλλ→=知,存在δ>0,使()()0T o f λλ∇+<x s ,(0,)λδ∀∈代入(补.1)并由λ>0得到,()(f f λ+<x s x ,(0,)λδ∀∈由此知s 是f 在x 处的下降方向。
一维搜索的搜索区间
第二阶段: 第二阶段: 采用某种分割技术或 插值方法缩小这个区间. 插值方法缩小这个区间.
一维搜索的搜索区间与进退法
进退法----确定搜索区间 进退法----确定搜索区间 ---进退法思想
从一点出发,按一定的步长, 试图确定出函数值呈现“高-低-高” 从一点出发,按一定的步长, 试图确定出函数值呈现“ 的三点。一个方向不成功,就退回来,再沿相反方向寻找。 的三点。一个方向不成功,就退回来,再沿相反方向寻找。
一维搜索的搜索区间与进退法
进退法----确定搜索区间 进退法----确定搜索区间 ---进退法的计算步骤
一维搜索的搜索区间与进退法
一维搜索的概念
根据步长选取的不同原则,一维搜索分为两种类型: 根据步长选取的不同原则,一维搜索分为两种类型:
(1) 最优一维搜索 精确一维搜索 最优一维搜索(精确一维搜索 精确一维搜索)
最优步长 最优步长
一维最优化问题
(2) 可接受一维搜索 非精确一维搜索 可接受一维搜索(非精确一维搜索 非精确一维搜索) 适当的下降量: 适当的下降量
一维搜索的搜索区间与进退法
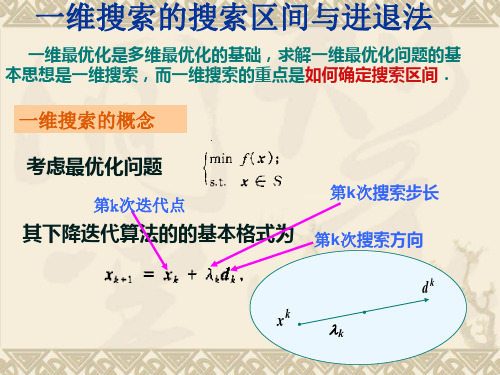
一维最优化是多维最优化的基础, 一维最优化是多维最优化的基础,求解一维最优化问题的基 如何确定搜索区间. 本思想是一维搜索,而一维搜索的重点是如何确定搜索区间 本思想是一维搜索,而一维搜索的重点是如何确定搜索区间.
一维搜索的概念 考虑最优化问题
第k次迭代点 第k次搜索步长 次
一维搜索的搜索区间与进退法
进退法----确定搜索区间 进退法----确定搜索区间 ---举例
其下降迭代算法的的基本格式为 第k次搜源自方向 次dkx .
一维搜索的搜索区间
一维搜索的搜索区间与进退法
进退法----确定搜索区间 进退法的计算步骤
一维搜索的搜索区间与进退法
进退法----确定搜索区间 举例
最优步长一维最优化问题在实际应用中有着重要价值一维搜索的概念最优一维搜索的性质几何解释一般地线性搜索算法分成两个阶段
一维搜索的搜索区间与进退法
一维搜索的概念
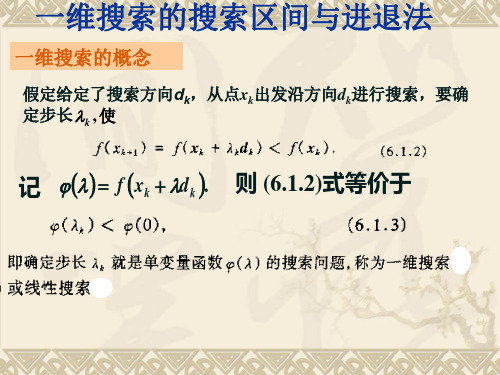
假定给定了搜索方向dk,从点xk出发沿方向dk进行搜索,要确
定步长 k , 使
记 f xk dk . 则 (6.1.2)式等价于
进退法----确定搜索区间
一般地,线性搜索算法分成两个阶段:
第一阶段:确定包含理想的步长因子 (或问题最优解)的搜索区间;
如何确定一个包含极小点的搜索区间? 进退法!
第二阶段: 采用某种分割技术或 插值方法缩小这个区间.
一维搜索的搜索区间与进退法
进退法----确定搜索区间
进退法思想
从一点出发,按一定的步长, 试图确定出函数值呈现“高-低-高” 的三点。一个方向不成功,就退回来,再沿相反方向寻找。
一维搜索的搜索区取的不同原则,一维搜索分为两种类型:
(1) 最优一维搜索(精确一维搜索)
一维最优化问题
最优步长
(2) 可接受一维搜索(非精确一维搜索) 适当的下降量:
在实际应用中 有着重要价值
一维搜索的搜索区间与进退法
一维搜索的概念 最优一维搜索的性质
几何解释
一维搜索的搜索区间与进退法
§4.3 一维搜索方法
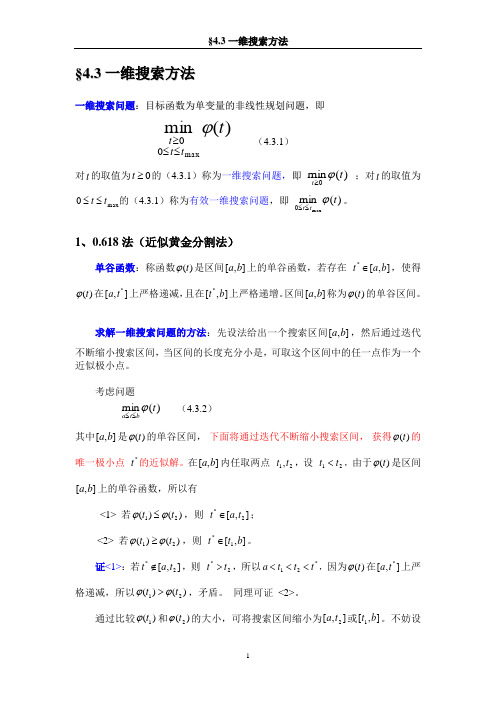
§4.3 一维搜索方法一维搜索问题:目标函数为单变量的非线性规划问题,即)(min max00t t t t ϕ≤≤≥ (4.3.1)对t 的取值为0≥t 的(4.3.1)称为一维搜索问题,即 )(min 0t t ϕ≥ ;对t 的取值为max 0t t ≤≤的(4.3.1)称为有效一维搜索问题,即 )(minmax0t t t ϕ≤≤。
1、0.618法(近似黄金分割法)单谷函数:称函数)(t ϕ是区间],[b a 上的单谷函数,若存在 ],[*b a t ∈,使得)(t ϕ在],[*t a 上严格递减,且在],[*b t 上严格递增。
区间],[b a 称为)(t ϕ的单谷区间。
求解一维搜索问题的方法:先设法给出一个搜索区间],[b a ,然后通过迭代不断缩小搜索区间,当区间的长度充分小是,可取这个区间中的任一点作为一个近似极小点。
考虑问题)(min t bt a ϕ≤≤ (4.3.2)其中],[b a 是)(t ϕ的单谷区间, 下面将通过迭代不断缩小搜索区间, 获得)(t ϕ的唯一极小点 *t 的近似解。
在],[b a 内任取两点 21,t t ,设 21t t <,由于)(t ϕ是区间],[b a 上的单谷函数,所以有<1> 若)()(21t t ϕϕ≤,则 ],[2*t a t ∈;<2> 若)()(21t t ϕϕ≥,则 ],[1*b t t ∈。
证<1>:若],[2*t a t ∉,则 2*t t >,所以*21t t t a <<<,因为)(t ϕ在],[*t a 上严格递减,所以)()(21t t ϕϕ>,矛盾。
同理可证 <2>。
通过比较)(1t ϕ和)(2t ϕ的大小,可将搜索区间缩小为],[2t a 或],[1b t 。
不妨设为],[2t a ,则在],[2t a 只需另找一个点 2t ',比较 1t 和2t '的目标函数值,又可以进一步缩小搜索区间。
最优化 14 一维搜索
2
k ak (1 )(bk ak ) k ak (bk ak )
若令 1 ,即 1 ,则k 1 k,
2 2
k 1不必重新计算,减少计算量。
解方程 2 1
计算f (1 )和f ( 1 )。令k 1。
2.若bk ak L,则停止计算;否则当 f (k ) f ( k ) 时,转3;当f (k ) f ( k )时,转4。
3.置ak 1 k , bk 1 bk , k 1 k ,
k 1 ak 1 0.618(bk 1 ak 1 ), 计算f ( k 1 ),转5。
计算 f (k 1), k k 1
k 1 k k 1 ak 1 0.618(bk 1 ak 1 )
计算 f (k 1 ), k k 1
步骤:
1.置初始区间[a1 , b1 ]及精度要求L 0,计算
1 a1 0.382(b1 a1 ), 1 a1 0.618(b1 a1 ),
k ak (1 )(bk ak ) k ak (bk ak )
设在第k次迭代得出f (k ) f ( k ),则 [ak 1 , bk 1 ] [ak , k ] 在第k 1次迭代中,需要取试探 点k 1, k 1
k 1 ak 1 (bk 1 ak 1 ) ak ( k ak ) ak (ak (bk ak ) ak ) 2 k ak (1 )(bk ak ) ak (bk ak ). k ak (bk ak )
如果存在k,使得 f x ( k ) k d ( k ) f x ( k ) 则称该一维搜索为非精确一维搜索(Inexact Line Search).
机械优化设计课后答案
机械优化设计课后答案【篇一:机械优化设计第5章习题参考答案】?4000.333?时, f(x*)??cjxj??5.567。
t第2题答案:x??2024840 0?,z??428。
*t第3题提示:求解方法可参考第四节中的应用实例。
第4题提示:如果设x1、x2、x3、x4、x5分别以Ⅰ、Ⅱ、Ⅲ、Ⅳ、Ⅴ五种下料方式所用钢材的件数,则此问题的数学模型是:求一组xj(j?1,2,?,5)的值,满足下列限制条件x1?2x2 ?x4 ?100?2x3?2x4?x5 ?100???3x1?x2?2x3 ?3x5?100?xj?0 (j?1,2,?,5)??使总的尾料z?0.1x2?0.2x3?0.3x4?0.8x5 达到最小。
【篇二:《机械优化设计》复习题答案】xt>一、填空题1、用最速下降法求f(x)=100(x2- x12) 2+(1- x1) 2的最优解时,设x(0)=[-0.5,0.5]t,第一步迭代的搜索方向为 [-47,-50]t。
2、机械优化设计采用数学规划法,其核心一是,二是。
3、当优化问题是的情况下,任何局部最优解就是全域最优解。
4、应用进退法来确定搜索区间时,最后得到的三点,即为搜索区间的始点、中间点和终点,它们的函数值形成高-低-高趋势。
5、包含n个设计变量的优化问题,称为维优化问题。
6、函数 1txhx?btx?c的梯度为。
28模型的基本要素。
9、对于无约束二元函数f(x1,x2),若在x0(x10,x20)点处取得极小值,其必要条件是10约束函数梯度的非负线性组合。
11、用黄金分割法求一元函数f(x)?x2?10x?36的极小点,初始搜索区间[a,b]?[?10,10],经第一次区间消去后得到的新区间为12、优化设计问题的数学模型的基本要素有、。
?1?h13、牛顿法的搜索方向dkkgk,其计算量且要求初始点在极小点置。
14、将函数f(x)=x12+x22-x1x2-10x1-4x2+60表示成1txhx?btx?c 的形式215、存在矩阵h,向量 d1,向量 d2,当满足t d1和向量 d2是关于h共轭。
一维搜索
这两类方法一般只能求得极小点的近似值。
3.一维搜索的基本框架
一维搜索实际上是一元函数的极值问题,其基本的解决框 架是:
(1)确定包含最优解的初始搜索区间;
(2)采用某些区间分割技术或插值方法不断缩小搜索区 间,最后得到解。
5
0.056 0.348 0.168 0.236 -1.112 -1.125
6
0.168 0.348 0.236 0.279 -1.125 -1.123
7
0.168 0.279
函数逼近法
函数逼近法
谢谢!
一维搜索
一.一维搜索的基本概念 二. 试探法 三.函数逼近法
一维搜索的基本概念
一维搜索的基本概念
一维搜索的基本概念
2.一维搜索的方法有哪些?
一维搜索的方法有很多大体可以分成两类: 一类是试探法。采用这类方法,需要按照某种方式找
试探点,通过一系列试探点来确定极小点。 另一类是函数逼近法,或称插值法。这类方法是用某
确定初始区间
确定初始搜索区间的进退法
单峰函数的定义
缩小搜பைடு நூலகம்区间
下面定理表明,对单峰函数,可以通过简单地比较函数值,缩小搜索 区间。 定理:
试探法
一维搜索常见方法中0.618法,Fibonacci法,二分法等基本 思想都是通过取试探点并进行函数值比较,然后不断缩小搜索 区间,当区间长度缩到一定程度后,区间内各点均可作为近似 解。这类方法仅需计算函数值,十分简便,尤其适合于非光滑 及导数表达式复杂或写不出的情形,用途广泛。 这里主要介绍0.618法。
试探法
试探法
试探法
最优化设计:第5章 一维最优化方法
➢用切线代替弧线来逐渐逼近函数根值。
华南理工大学机械与汽车工程学院
19
华南理工大学机械与汽车工程学院
20
5.5 格点法
首先利用m 个等分点α1、 α2 、α3 、…、αm将目标函 数f (α) 的初始单峰搜索区间[a,b]分成m+1 个大小相 等的子区间,计算目标函数f (α) 在这m 个等分点的 函数值,并比较找出其中的最小值f (αk)
华南理工大学机械与汽车工程学院
21
那么在连续的三点αk −1 、αk 和αk +1处目标函数值呈 现“两头大、中间小”的情况,因此极小值点α*必
然位于区间[αk −1 , αk +1] 内,做置换 a = αk −1 , b = αk +1
若αk +1−αk -1 ≤ε ,则将αk 作为α*的近似解。否则,将 新区间等分,并重复上述步骤,直至区间长度缩至
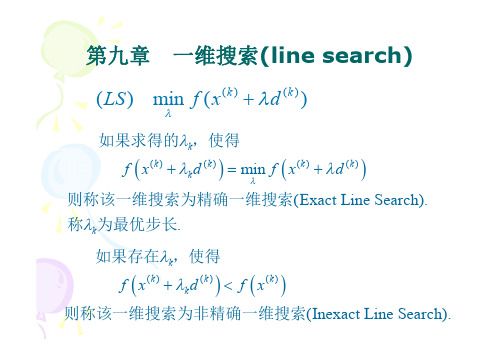
第5章 一维最优化方法
min f ( xk1 ) f ( xk sk )
✓一维搜索是多维搜索的基础。 ✓求解一维优化问题首先要确定初始的搜索区 间,然后再求极小值点。 ✓一维优化方法可分为两类: 直接法:按某种规律取若干点计算其目标函 数值,并通过直接比较目标函数值来确定最 优解; 间接法:即解析法,需要利用导数。
3
➢进退法一般分两步:一是初始探察确定进 退,二是前进或后退寻查。
华南理工大学机械与汽车前工程进学运院 算
4
华南理工大学机械与汽车工程学院
5
后退运算
华南理工大学机械与汽车工程学院6Biblioteka 华南理工大学机械与汽车工程学院
7
5.2 黄金分割法
➢黄金分割法是利用区间消去法的原理,通 过不断缩小单峰区间长度,即每次迭代都 消去一部分不含极小值点的区间,使搜索 区间不断缩小,从而逐渐逼近目标函数极 小值点的一种优化方法。
最优化理论与算法一维搜索
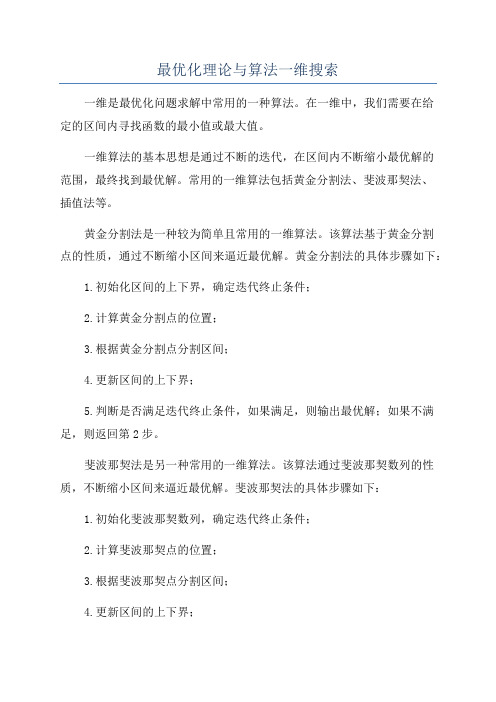
最优化理论与算法一维搜索一维是最优化问题求解中常用的一种算法。
在一维中,我们需要在给定的区间内寻找函数的最小值或最大值。
一维算法的基本思想是通过不断的迭代,在区间内不断缩小最优解的范围,最终找到最优解。
常用的一维算法包括黄金分割法、斐波那契法、插值法等。
黄金分割法是一种较为简单且常用的一维算法。
该算法基于黄金分割点的性质,通过不断缩小区间来逼近最优解。
黄金分割法的具体步骤如下:1.初始化区间的上下界,确定迭代终止条件;2.计算黄金分割点的位置;3.根据黄金分割点分割区间;4.更新区间的上下界;5.判断是否满足迭代终止条件,如果满足,则输出最优解;如果不满足,则返回第2步。
斐波那契法是另一种常用的一维算法。
该算法通过斐波那契数列的性质,不断缩小区间来逼近最优解。
斐波那契法的具体步骤如下:1.初始化斐波那契数列,确定迭代终止条件;2.计算斐波那契点的位置;3.根据斐波那契点分割区间;4.更新区间的上下界;5.判断是否满足迭代终止条件,如果满足,则输出最优解;如果不满足,则返回第2步。
插值法是一种基于函数插值的一维算法。
该算法通过插值函数来拟合原函数,并通过求解插值函数的最小值或最大值来近似求解原函数的最小值或最大值。
插值法的具体步骤如下:1.初始化区间的上下界,确定迭代终止条件;2.根据插值函数拟合原函数,得到插值函数的表达式;3.求解插值函数的最小值或最大值;4.更新区间的上下界;5.判断是否满足迭代终止条件,如果满足,则输出最优解;如果不满足,则返回第2步。
除了上述算法,还存在其他一维算法,如割线法、牛顿法等。
这些算法各有特点,适用于不同类型的最优化问题。
一维算法的优势在于其计算简单、耗时少的特点。
然而,一维算法也存在一些缺点,例如容易陷入局部最优解、收敛速度较慢等。
因此,对于一些复杂的最优化问题,可能需要使用更高维度的算法进行求解。
总之,一维是最优化问题求解中常用的一种算法。
通过在给定的区间内不断迭代,可以逼近最优解。
完整版一维搜索方法
f (? 1 ) f (? 2 )
o
?1 ?2
?
6
2) 若f1≤ f2 ,如下图所示, 则作后退计算。 令 h=-h, 将α1、 f1与α2、 f2对调,转入第3)步。
f (? )
f (? 2 )
f (? 1)
o
?1 ?2 ?
7
3)计算第3个试点α3 =α2+h, 计算函数值f3=f(α3), 并 比较f2 和 f3 ,有如下两种情况 :
1
? 一维优化一般可分为两大步骤: ?确定初始搜索区间[a,b]; 该区间应为包含一维优化目标函数的极小点在内的单 峰区间。 ?在搜索区间[a,b]内寻找极小点。
优化算法的基本迭代公式:
X k?1 ? X k ? ? k S k , k ? 0, 1, 2,?
当迭代初始点 Xk 及搜索方向Sk 确定后,迭代所得的新点 Xk?1 取
作代换: α1 =α2 , f1=f2; α2 =α3 , f2 = f3。 继续计算
α3 (即步骤 3) );如此重复该过程,总能找到相继3试点 的函数值符合“大-小-大” 变化的要求。左端点为a,
右端点为b,从而找到了搜索区间[a, b]。
f (? )
f (? 1) f (? 2 )
f (? 3 )
a=min( α1 ,α3 ), b=max ( α1 ,α3 )
h=2h, α3= α2+h, 计算f(α3)
N
作代换 α1 =α2 , α2 =α3 , f(α1)= f(α2) , f(α2)= f( α3) , α3= α2+h, 计算f(α3)
结束
10
? 进退法确定搜索区间的步骤:
2. 方法二 (1) 给定初始点α0和初始步长h0; (2) 令α1 =α0, h=h0, α2 =α1+h, 得: 两试点α1 ,α2 ,计算 f1 =f(α1), f2 =f(α2);
最优化方法-一维搜索法

搜索区间及其确定方法
• 加步探索法算法的计算步骤: • (1) 选取初始数据.选取初始点 t0 [0, ) (或 t0 [0, tmax ]),
计算0 (t0 ), 给出初始步长h0 0, 加步系数 1,令 k 0 • (2) 比较目标函数值.令 tk 1 tk hk计算 k1 (tk1) ,
方向 Pk 之间应满足
f (Xk1)T Pk 0
4.2
• 事实上,设 (t) f ( X k tPk ), 对 t 求导有
(t) f (X k tPk )T Pk
• 令 '(t) 0, 即 f (X k tPk )T Pk 0 所以 f (X k1)T Pk 0
这一准则对于定义域上的凸函数是完全正确的.若是非凸函数,有 可能导致误把驻点作为最优点。 对于约束优化问题,不同的优化方法有各自的终止准则.
• 定义3.3 当一个算法用于n元正定二次函数求最优 解时,可以从任意初始点出发,至多经过n步迭 代求出最优解,就称此算法具有二次终止性。
• 如果算法具有二次终止性,则认为算法比较好。 • 二次终止性仅仅是判断一个算法优劣的衡量标准
存在
,且
,则称[t1 t2]是函数(t)
的最优解 的一个搜索区间。
搜索区间及其确定方法
•单峰区间和单峰函数有如下有用的性质: •定理3.1 设 : R1 R1, [a, b] 是的单峰区间,任取
t1, t2 [a, b] 并且 t2 t1 . (1)若有 (t2 ) (t1) ,则 [a, t1 ]是(t) 的单峰区间. (2)若有 (t2 ) (t1) ,则[t2 , b]是(t)的单峰区间.
第三节 一维搜索方法
若令 t1′ = t1 ,则有 w = 1 ;若令 t2′ = t1 ,则有 w = 0.618 以后类似迭代
0.618法步骤 0.618法步骤
称为在[a,b]上是单谷 [a,b]上是单谷的 函数 ϕ (t ) 称为在[a,b]上是单谷的,如果存在一个 t * ∈ [a , b] ,使得 ϕ (t ) 在 [a , t * ] 上严格递减,且在 [t * , b] 上严格递增。区间[a,b]称为 ϕ (t ) 的单谷区间。 上严格递减, 上严格递增。区间[a,b] [a,b]称为 单谷区间。
• 例4.3.3 用Goldstein法求解 Goldstein法求解 min ϕ (t ) = t 3 − 2t + 1
t ≥0
t0 取= 2, m1 = 0.2, m2 = 0.7, α = 2
解答
4.Armijo法 4.Armijo法
• Armijo法 法
ϕ (0)
y = ϕ (t )
tk
Mt
第三节 一维搜索方法
目标函数为单变量的非线性规划问题称为一维搜索问 目标函数为单变量的非线性规划问题称为一维搜索问 线性搜索问题) 题(或线性搜索问题),其数学模型为 min ϕ (t) ,
t ≥0 ( 0≤ t ≤ t max )
其中 t ∈ R 。
精确一维搜索方法: 0.618法 Newton法 精确一维搜索方法: 0.618法,Newton法 非精确一维搜索方法: Goldstein法 Armijo法 非精确一维搜索方法: Goldstein法,Armijo法
1. 0.618法 0.618法
• 0.618法——思想 0.618法——思想
第一步: 插入 t1 , t2使 [ a, t2 ][t1 , b ] 等长度,令 第一步: 等长度,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第5章 一维搜索§5.1 最优化算法的简单介绍1.算法概念在解非线性规划时,所用的计算方法,最常见的是迭代下降算法. 迭代:从一点)(k x 出发,按照某种规则A 求出后继点)1(+k x.用1+k 代替k ,重复以上过程,产生点列}{)(k x。
规则A 是在某个空间X 中点到点的映射,即对每一个X xk ∈)(,有点X xA xk k ∈=+)()()1(.更一般地,把A 定义为点到集的映射,即对每个点X x k ∈)(,经A 作用,产生一个点集X xA k ⊂)()(.任意选取一个点)()()1(k k xA x∈+,作为)(k x的后继点.定义1: 算法A 是定义在空间X 上的点到集映射,即对每一个点X x ∈,给定-个子集X x A ⊂)(.例1 考虑线性规划:1s.t. min 2≥x x最优解1=x .设计一个算法A 求出这个最优解.⎪⎪⎩⎪⎪⎨⎧<⎥⎦⎤⎢⎣⎡+≥⎥⎦⎤⎢⎣⎡+=1 ,1 ),1(211 ,)1(21 ,1x x x x A 从一点出发,经A 作用得到一个闭区间.从此区间中任取一点作为后继点,得到一个点列.在一定条件下,该点列收敛于问题的解.利用算法A 可以产生不同的点列,如以3=x 为起点可产生点列:{} ,5/4 ,3/2 ,2 ,3其聚点是问题的最优解.在许多情况下,要使算法产生的点列收敛于全局最优解是比较困难的.因此,一般把满足某些条件的点集定义为解集合.当迭代点属于这个集合时,就停止迭代.无约束最优化问题可以定义解集合为}0)(|{=∇=Ωx f x约束最优化问题可以定义解集合为}T -K 为|{点x x =Ω2. 算法收敛问题设Ω为解集合,X X A →:是一个算法,集合X Y ⊂.若以任一初点Y x∈)1(开始,算法产生的序列其任一收敛子序列的极限属于Ω,则称算法映射A 在Y 上收敛.收敛速率: 定义2: 设序列}{)(k γ收敛于*γ,定义满足∞<=--≤+∞→βγγγγpk k k *)(*)1(lim的非负数p 的上确界为序列}{)(k γ的收敛级.若序列的收敛级为p ,就称序列是p 级收敛的.若1=p 且1<β,则称序列是以收敛比β 线性收敛的. 若1>p 或者1=p 且0=β,则称序列是超线性收敛的. 例2 序列{}10 ,<<a a k.0→ka 1lim1<=+∞→a aakk k序列{}ka以收敛比a 线性收敛于零.例3 序列{}10 ,2<<a ak02→ka[]1lim2221=+∞→kk a ak序列{}ka 2是2 级收敛的.注1:收敛级取决于当∞→k 时该序列所具有的性质,它反映了序列收敛的快慢. 收敛级p 越大,序列收敛得越快.当收敛级p 相同时,收敛比β越小,序列收敛得越快。
§5.2 一维搜索基本概念5.2.1 基本概念在许多迭代下降算法中,得到点)(k x 后,需要按某种规则确定一个方向)(k d,再从)(k x出发,沿方向)(k d在直线(或射线)L 上求目标函数的极小点,从而得后继点)1(+k x .求目标函数在直线上的极小点,称为一维搜索,或称为线搜索.一维搜索可归结为单变量函数的极小化问题.求目标函数)(x f 在直线L 上极小点转化为求一元函数)()()()(k k dxf λλφ+=的极小点.一维搜索大体可分成两类:试探法: 按某种方式找试探点.通过一系列试探点来确定极小点.函数逼近法,或插值法:用某种较简单的曲线逼近本来的函数曲线,通过求逼近函数的极小点来估计目标函数的极小点.这两类方法一般只能求得极小点的近似值,称为非精确一维搜索.5.2.2 搜索区间及其确定方法一维搜索需要事先给定一个包含极小点的区间,此区间称为搜索区间。
搜索区间确定方法:进退法.进退法是一种试探法:从一点出发,按一定的步长,试图确定出函数值呈现“高-低-高”的三点。
一个方向不成功,就退回来.再沿相反方向寻找.进退法的计算步骤: (l)给定初点1)0(R x∈,初始步长00>h .置0h h =,)0()1(xx=,计算)()1(xf ,并置0=k .(2)令h xx+=)1()4(,计算)()4(xf ,置1:+=k k .(3)若)()()1()4(xf x f <,则转步骤(4);否则,转步骤(5). (4)令)1()2(x x=, )4()1(xx=, )()()1()2(xf xf =, )()()4()1(xf xf =,置02:h h =,转步骤(2).(5) 若1=k ,则转步骤(6);否则,转步骤(7). (6) 置h h -=:, )4()2(xx =,)()()4()2(xf x f =,转步骤(2).(7) 令)2()3(xx=,)1()2(xx=,)4()1(x x=,停止计算.得到含有极小点的区间],[)3()1(xx 或者],[)1()3(xx .注2:实际应用中,为了获得合适的0h ,有时需要做多次试探才能成功.5.2.3 单峰函数及其性质定义3: 设f 是定义在闭区间],[b a 上的一元实函数, x 是f 在],[b a 上的极小点,并且对任意的],[,)2()1(b a x x ∈,)2()1(xx<,有当x x≤)2(时,)()()2()1(xf xf >,当)1(xx ≤时,)()()1()2(xf xf >,则称f 是在闭区间],[b a 上的单峰函数.单峰函数的性质:通过计算区间],[b a 内两个不同点处的函数值,就能确定一个包含极小点的子区间.定理1: 设f 是区间],[b a 上的单峰函数,],[,)2()1(b a xx ∈,且)2()1(xx <.如果)()()2()1(xf xf >,则对每一个],[)1(xa x ∈,有)()()2(xf x f >;如果)()()2()1(x f xf ≤,则对每一个],[)2(b x x ∈,有)()()1(xf x f >.根据定理1,只需选择两个试探点,就可将包含极小点的区间缩短.§5.3 0.618法和Fibonacci 法5.3.1 0.618法0.618 法(黄金分割法)适用于单峰函数.基本思想:通过取试探点使包含极小点的区间(不确定区间)不断缩短,当区间长度小到一定程度时,区间上各点的函数值均接近极小值,因此任意一点都可作为极小点的近似.试探点计算公式:设)(x f 在],[11b a 上单峰,极小点],[11b a x ∈.设进行第k 次迭代时,有],[k k b a x ∈.为缩短包含极小点的区间,取两个试探点],[,k k k k b a ∈μλ,并规定k k μλ<.)(382.0k k k k a b a -+=λ (1))(618.0k k k k a b a -+=μ (2)计算步骤:(1)置初始区间],[11b a 及精度要求0>L ,计算试探点1λ和1μ,计算函数值)(1λf 和)(1μf .计算公式:)(382.01111a b a -+=λ )(618.01111a b a -+=μ令1=k .(2)若L a b k k <-,则停止计算.否则,当)()(k k f f μλ>时,转步骤(3);当)()(k k f f μλ≤时,转步骤(4).(3)置k k a λ=+1,k k b b =+1,k k μλ=+1, )(618.01111++++-+=k k k k a b a μ 计算函数值)(1+k f μ,转步骤(5).(4)置k k a a =+1,k k b μ=+1,k k λμ=+1, )(382.01111++++-+=k k k k a b a λ 计算函数值)(1+k f λ,转步骤(5).(5)置1:+=k k ,返回步骤(2).例4:解下列问题:12)(min 2--=x x x f 。
初始区间]1 ,1[],[11-=b a ,精度16.0=L .kk a k b k λ k μ )(k f λ )(k f μ1 -1 1 -0.236 0.236 -0.653 -1.1252 -0.236 1 0.236 0.528 -1.125 0.9703 -0.236 0.528 0.056 0.236 -1.050 -1.1254 0.056 0.528 0.236 0.348 -1.125 -1.106 5 0.056 0.348 0.168 0.236 -1.112 -1.125 6 0.168 0.348 0.236 0.279 -1.125 -1.123 70.1680.279经6次迭代达到L a b <=-111.077,极小点]279.0,168.0[∈x .该问题的最优解25.0*=x .可取23.02/)279.0168.0(=+=x 作为近似解.5.3.2 Fibonacci 法Fibonacci 法与0.618法类似,也是用于单峰函数. Fibonacci 法与0.618法的主要区别:(1)区间长度缩短比率不是常数,而是由Fibonacci 数确定. (2)需要事先知道计算函数值的次数. 定义4:设有数列}{k F ,满足条件:(1)110==F F ;(2)),2,1( 11 =+=-+k F F F k k k 则称}{k F 为Fibonacci 数列.k0 1 2 3 4 5 6 7 8 9 ⋯ k F11235813213455⋯Fibonacci 法在迭代中计算试探点的公式:1,,1 ),(11-=-+=+---n k a b F F a k k k n k n k k λ (3)1,,1 ),(1-=-+=+--n k a b F F a k k k n k n k k μ (4)n 是计算函数值的次数.利用(3)式和(4)式计算试探点时,第k 次迭代区间长度的缩短比率恰为1/+--k n k n F F . 给定初始区间长度11a b -及精度要求L ,可求出计算函数值的次数n (不包括初始区间端点函数值的计算).由下式La b F n 11-≥求出Fibonacci 数n F ,根据n F 确定计算函数值的次数n .Fibonacci 法与0.618 法的关系: (1)0.618法可作为Fibonacci 法极限形式:618.0lim1≈-∞→nn n F F(2)Fibonacci 法精度高于0.618 法.在计算函数值次数相同条件下,0.618法的最终区间大约比使用Fibonacci 法长17%.(3)Fibonacci 法缺点是要事先知道计算函数值次数.0.618 法不需要事先知道计算次数,且收敛速率与Fibonacci 法比较接近.在解决实际问题时,一般采用0.618法.§5.4 插值法(二次)5.4.1 牛顿法(一点二次插值法)基本思想:在极小点附近用二阶Taylor 多项式近似目标函数)(x f ,进而求出极小点的估计值.考虑问题1),(min R x x f ∈ (5)令 2)()()()(')())(("21))(()()(k k k k k xx xf x x x f xf x -+-+=ϕ又令 0))((")()()()()(''=-+=k k k xx xf xf x ϕ得到)(x φ的驻点,记作)1(+k x,则)(")(')()()()1(k k k k xf x f xx-=+ (6)在点)(k x 附近,)()(x x f ϕ≈,因此可用函数)(x ϕ的极小点作为目标函数)(x f 极小点的估计.如果)(k x 是)(x f 极小点的一个估计,那么利用(6)式可以得到极小点的一个进一步的估计.利用迭代公式(6)可以得到一个序列}{)(k x.可以证明,在一定条件下,这个序列收敛于问题(5)的最优解,而且是2级收敛. 牛顿法的计算步骤: (1)给定初点)0(x ,允许误差0>ε,置0=k .(2)若ε<|)('|)(k x f ,则停止迭代,得到点)(k x.(3)计算点)1(+k x,)(")(')()()()1(k k k k xf x f xx-=+,置1:+=k k ,转步骤(2).注3:运用牛顿法时,如果初始点靠近极小点,则可能很快收敛;如果远离极小点,迭代产生的点列可能不收敛于极小点.5.4.2 割线法(二点二次插值法)基本思想:用割线逼近目标函数的导函数的曲线)('x f y =,把割线的零点作为目标函数的驻点的估计.迭代公式:)(')(')(')()1()()1()()()1(k k k k k k k xf x f xf xx xx--+---=得到序列}{)(k x.可以证明,在一定的条件下,这个序列收敛于解(收敛级为1.618).注4:与牛顿法相比,收敛速率较慢,但不需要计算二阶导数.注5:缺点与牛顿法类似,都不具有全局收敛性,如果初点选择得不好,可能不收敛.5.4.3 抛物线法(三点二次插值法)基本思想:在极小点附近,用二次三项式)(x ϕ逼近目标函数)(x f ,令)(x ϕ与)(x f 在三点)3()2()1(xxx<<处有相同的函数值,并假设)()()2()1(x f xf >,)()()3()2(xf xf <.令 2)(cx bx a x ++=ϕ 又令)()()1(2)1()1()1(x f cx bxa x=++=ϕ (7) )()()2(2)2()2()2(x f cx bx a x =++=ϕ (8) )()()3(2)3()3()3(xf cxbxa x=++=ϕ (9)解方程组(7)-(9),求二次逼近函数)(x ϕ的系数b 和c .为书写方便,记)()()1(2)3(2)2(1x f x x B -= )()()1()3()2(1x f xxC -= )()()2(2)1(2)3(2x f x x B -= )()()2()1()3(2xf xx C -=)()()3(2)2(2)1(3xf xxB -= )()()3()2()1(3xf xxC -=))()(()1()3()3()2()2()1(xxxx xxD ---=由方程(7)-(9)得到D B B B b /)(321++= (10) D C C C c /)(321++-= (11))(x ϕ的极小点对应的驻点为cb x 2-=.把驻点x 记作)(k x ,则)(2321321)(C C C B B B xk ++++=(12)把)(k x作为)(x f 的极小点的一个估计.再从)1(x ,)2(x,)3(x,)(k x中选择目标函数值最小的点及其左、右两点,给予相应的上标,代入(12)式,求出极小点的新的估计值)1( k x.以此类推,产生点列}{)(k x.注6:在一定条件下,这个点列收敛于问题的解,其收敛级为1. 3.。