美国海军水下无人航行器发展综述
美海军无人潜航器发展
美海军无人潜航器发展无人潜航器(UUV)有着广泛而重要的军事用途,在未来海战中有不可替代的作用。
UUV利用自身的各种传感器和武器,执行远程通信中继、反潜警戒、水下侦察与监视、反水雷等一系列重要军事支援任务。
UUV在未来海战中UUV还可作为水下武器平台、后勤支持平台等装备使用。
UUV具有零伤亡、隐蔽性能强、可重复使用和性价比高的特征,可通过搭载不同类型任务载荷,完成多种使命任务,应用前景十分广阔,作为一支独具特色的作战力量,已经成为未来海战的“倍增器”。
美国是研究水下无人潜航器平台时间最早、装备型号最多、功能最强大、技术水平最高的国家,引领各国水下无人平台的发展方向。
一规划2000年,美海军发布《无人潜航器主计划》第1版,明确了水下无人航行器在军事应用方面的7种使命与4 种作战的特征能力。
2002年,美海军颁布《美国海军转型路线图》,提出了加强海军新型无人飞机、水下无人潜航器等无人装备的研制和使用,以发展和运用海军持久的情报监视侦察能力、反潜战能力和反水雷能力。
2004年,美军公布的UUV 的发展规划报告中,为实现《21世纪海上力量》提出的4 种支柱能力目标,综合考虑动力能源技术、指挥控制通信自动化技术、载荷/传感器等技术的发展情况,按照优先级提出了UUV 的9 种“子支柱”能力及任务使命:情报、监视和侦察(ISR)、反水雷措施(MCM)、反潜战(ASW)、检查/识别、海洋学、通信/导航网络节点(CN3)、载荷投送、信息战(IO)以及时敏打击(TCS)。
美军先后发布了多版《无人系统集成路线图》。
系列文件显示了美军发展智能化AUV的规划,具有重要的导向作用。
2007年,美海军在《2007-2032 美国无人系统集成路线图》中提出无人系统4 大关键任务需求:侦察与监视;目标识别与指示;反水雷;核生化、辐射及爆炸物侦测。
2009年,美海军在《2009-2034 美国无人系统集成路线图》中提出了5项联合能力域中无人系统需求和2 项性能发展需求。
国外水下无人潜航器及其通信技术发展综述

国外水下无人潜航器及其通信技术发展综述一、本文概述随着科技的快速发展,无人潜航器(Unmanned Underwater Vehicle,UUV)作为海洋探索与利用的重要工具,已经吸引了全球科研人员和工程师的广泛关注。
作为无人潜航器的重要组成部分,水下通信技术对于实现潜航器的远程控制、数据传输、多潜航器协同作业等功能具有关键作用。
本文旨在综述国外水下无人潜航器及其通信技术的发展现状与趋势,分析当前主流通信技术的优缺点,并探讨未来可能的研究方向和应用前景。
通过对国外相关文献的梳理和分析,本文旨在为国内外从事水下无人潜航器及通信技术研究的学者和工程师提供有益的参考和启示。
二、国外AUV的发展现状近年来,随着科技的飞速发展,国外在自主水下航行器(AUV)领域取得了显著的进步。
AUV作为水下无人潜航器的一种,其自主导航、环境感知、任务执行等能力不断增强,为海洋科学研究、海底资源勘探、水下搜救等领域提供了有力支持。
在硬件设计方面,国外的AUV技术日趋成熟。
许多先进的AUV已经实现了小型化、模块化、高度集成化,以适应不同复杂度的水下环境。
例如,某些AUV采用了先进的推进系统,包括矢量喷水推进器、机械式螺旋桨等,以提高其机动性和稳定性。
同时,为了应对深海高压、低温等极端环境,AUV的耐压壳体和材料技术也在不断更新,确保了AUV的安全性和可靠性。
在软件技术方面,国外的AUV已经实现了高度智能化和自主化。
通过集成先进的算法和人工智能技术,AUV可以自主完成路径规划、环境感知、目标识别等任务。
随着深度学习技术的发展,AUV在图像识别、声呐信号处理等方面也取得了显著突破,进一步提升了其在水下复杂环境中的作业能力。
在通信技术方面,国外的AUV同样取得了长足的进步。
为了实现在水下环境中的数据传输和远程控制,研究人员开发了一系列高效、稳定的水下通信技术。
例如,某些AUV采用了高速水声通信技术,实现了与水面基站或卫星的实时数据传输;还有研究团队在探索利用电磁波或光学通信技术在水下环境中实现数据传输的可能性。
中国在南海当面捞走美军无人潜航器国外无人潜航器最新发展现状

美全国广播公司 (NPR )16 日报道, 本周四 (12 月15 日),中国海军趁美国一艘无人潜航器浮上水面之机, 抢在美 军打捞人员之前将其捞走,事情发生在距离菲律宾苏比克湾 约 50 海里的海上。
美国泰里达因公司研制的斯洛克姆无人水下滑翔机(Slocum glider ) 美国:水下无人滑翔机将用于远海作战 美国海军 学院新闻网 (USNI news ) 今天补充了部分事件细节,据称, 捞走美国无人潜航器的是中国海军“南救 510”号打捞救生船, 该船为中国 922 型救捞船 (北约称“大浪 3”级),该舰当时与美 国正在用无人机进行海底地形探测作业的“鲍迪奇”号海洋调 查船仅 500 码(457.2 米) 。
被捞走的无人水下航行器是“水下 滑翔机”,这是美国最复杂的无人潜航器, 用于进行海洋调查, 上面装有用于探测海底地形的非保密装备。
美媒称捞走 他们水下航行器的就是这艘南救 510 号救捞船 无人潜航器,英文名 Unmannedunderwater vehicle 是没有 人驾驶、靠遥控或自动控制在水下 航行的器具,主要指那 些代替潜水员或载人小型潜艇进行深海探测、救生、排除水 雷等高危险性水下作业的智能化系统。
其实也就是水下机器 人(或其中某种) 。
人潜航器按应用领域,可分为军用与民 用。
在军用领域上,无人潜航器可作为一种新概念武器中无 人作战平台武器。
从这种意义上说,无人潜航器的作用和无 人机作用差不多。
中国在南海当面捞走美军无人潜航器 新发展现状 国外无人潜航器最从外形上看,一些无人潜航器与鱼雷十分相似,那是因为它们可能直接由拆除了炸药的鱼雷改进而来,或者是需要从潜艇的鱼雷发射管中释放,但更多的无人潜航器则针对特定的功能, 具有各自独特的构造。
无论外观怎样,无人潜航器一般都由骨架及浮体、推进系统、航行控制系统以及探测系统等部分组成,一些无人潜航器上还配有机械手等机构。
无人潜航器的发展得益于仿生学的进步,这一点毋庸置疑。
无人水下航行器声呐装备现状与发展趋势
无人水下潜航器(UUV)最早出现于20世纪60年代。
在发展初期,UUV主要用于深水勘探、沉船打捞、水下电缆铺设及维修等民用领域,后逐步扩展应用于水下声源探测、协助潜艇深水避雷、港口战术侦察等军事领域。
近十几年来,随着平台、推进器、导航、控制系统以及传感器技术的发展,加上现代战争追求人员零伤亡的理念,UUV的军事应用得到高度重视,其在水下侦察、水下通信和反潜、反水雷作战、信息作战等领域的应用得到了空前发展。
美国国防部于2007~2013年间前后发布了4版《无人系统(一体化)路线图》,其中针对UUV的4个级别将任务按优先级扩充为17项,如表1所示。
表1 不同级别UUV任务需求优先级美海军于2000年和2004年分别发布两版《海军无人水下潜航器总体主规划》,将UUV(不分级别)的任务按优先顺序归纳为9类:①情报/监视/侦察(ISR);②水雷对抗(MCM);③反潜战(ASW);④检查/识别;⑤海洋调查;⑥通信/导航网络节点(CN3);⑦载荷投送;⑧信息作战;⑨时敏打击。
不论是《海军无人水下潜航器总体主规划》,还是《无人系统(一体化)路线图》,这几版文件中对于所有级别的UUV,情报/监视/侦察(ISR)、检查/识别和水雷对抗(MCM)这3项任务的排序都十分靠前,这也印证了在当今复杂国际环境下美国海军对于这3项UUV任务执行的迫切需求。
UUV执行各项任务无一不需要声呐的配合,尤其是对于ISR、检查/识别和MCM,声呐性能的优劣,往往是任务完成度的决定性因素。
根据功能的不同,UUV声呐装备主要分为三大类:通信声呐、导航声呐和探测声呐,如图1所示。
图1 UUV主要声呐装备通信声呐主要用于UUV与协同行动的其他UUV、母船(艇)或通信浮标之间的信息链接;导航声呐为UUV的安全航行和执行作业任务提供其位置、航向、深度、速度和姿态等信息;探测声呐主要用于警戒、探测、识别水中或沉底目标信息,对水下地形、地貌、地质进行勘察和测绘。
无人水面航行器发展
S ac n y rga hc V hc ,A H) erh a d H do r i e i e S ,后来 p l
加坡 海军加入到了美 国海军 的S A T N 划 P RA 计 之 中。 P R A S 是 一种模 块化 、 SA T N U V 可重 构 、 多
无人 航行 展 装备研 究 麓 水面 器发
无 人 水 面 航 行 器 发 展
A s a c n t e De eo Re e r h o h v lpme to h ma n d S r c hc e n ft e Un n e u f e Ve ils a
一
使命功 能
关键技术
文 献标 识码 : A
文章 编号 :6 1 4 4 (0 9 0 — 0 7 0 1 7 - 5 7 2 0 )6 0 1 — 4
信 息 战是2 世纪 的主导 战争 样式 。随着 信 息战 向海 战 场 的延 伸 , 来 的海 战面 1 未
临着信息化的挑战。在海上一些恶劣海情和区域下 , 参战人员很难完成相应的作战
合扫雷能力。 国海军正在开发一种猎雷U V 美 S, 称 为 远 距 离 猎 雷 系 统 (e t Mieh nig R mo n— ut e n Ss m, MS 如 下 图 1, yt R , e )其通 气 孔 半 潜 于 水 下 , 拖曳有猎雷传感器。该系统是水面舰船建制式 反 水雷 的一种 。
任务 , 此 , 国 、 罗 斯 、 洲 、 为 美 俄 欧 日本 等 国 , 正在 加 紧 研 制 无 人 水 面 航 行 器 (s ) u v项 目, 于完成 恶劣 战 场环境 的作战需 求 。 用 无 人 水 面航 行 器 (s umand sr c eie是一 种 小 型水 面 自航 载体 , u v,n n e uf evhc ) a l 以 水 面舰 艇为支 援 平 台 , 长 时间 自主 远程航 行 的无 人 智能 小 型武 器装 备平 台。利用 可 无 人水 面航行 器 可 以进 行海 战 坊 隋报 收集 , 战场 监视 分析 、 战场感 知传 播等 。 海 海
UUV与AUV国内外发展情况
USV与AUV国内外发展情况一、USV国内发展情况1.1上海海事大学“海腾01”上海海事大学日前对外发布最新科研成果,由该校科学研究院航运技术与控制工程交通行业重点实验室无人水面艇课题组开发研制的“‘海腾01’号智能高速无人水面艇”成功落水。
作为国际研究热点,“海腾01”号瞄准世界最先进无人水面艇技术,开发具有全天候、高海况下自主航行,实时进行水面监视监测、水下测量勘探功能,多操控模式、大载荷特点的高速无人水面艇。
“海腾01”号可在海事巡航、航道测量、水文监测、水面防污染监测、进出港与过境船舶监测监视、水上消防、水上溢油控制与回收、海上搜寻救助、沉船勘探打捞、水上反恐、专属经济区守护与活动取证、海洋资源调查与取样等领域无人作业。
该项目获得2010年中央财政支持地方高校发展专项资金支持,并在国内首次实现海上溢油处理水面机器人技术及其装备的试验性应用。
据介绍,“海腾01”号智能高速无人水面艇长10.5米,宽3.6米,满载排水量8.5吨,吃水0.8米。
使用喷水推进,最大航速40节,巡航速度30节。
由艇体、推进系统、能源系统、导航系统、通讯系统、控制系统和任务系统等组成。
具有全自航模式、半自航模式和全遥控模式三种工作模式。
配备有毫米波雷达、激光雷达、前视声纳、立体视觉和360度监控摄像机等监测设备,可进行水上和水下障碍物的全方位探测。
并通过多源信息融合提高障碍物探测的准确性和可靠性,为自主避障提供足够信息。
“海腾01”号既可无人驾驶,也可人工驾驶,驾控台上的人工驾驶具有最高优先级,便于无人艇调试过程中的监控与紧急情况处置。
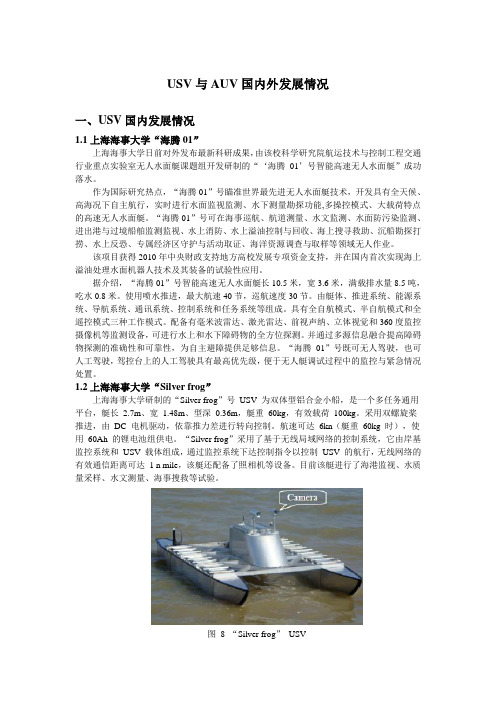
1.2上海海事大学“Silver frog”上海海事大学研制的“Silver frog”号USV 为双体型铝合金小船,是一个多任务通用平台,艇长2.7m、宽1.48m、型深0.36m,艇重60kg,有效载荷100kg。
采用双螺旋桨推进,由DC 电机驱动,依靠推力差进行转向控制。
航速可达6kn(艇重60kg 时),使用60Ah 的锂电池组供电。
美海军分析2025年自主潜航器需求

防务观察】美海军分析2025 年自主潜航器需求本文转自“国防科技要闻” ID : CDSTIC )一、自主潜航器基本分类自主潜航器是指可自主航行、执行水下作战任务的各种水下航行器。
美海军当前将其分为自推进型、环境动力型、其他系统三大类。
1. 自推进型自主潜航器自推进型自主潜航器可分为超大型、大型、中型、小型自主潜航器四类。
①超大型自主潜航器:直径超过84英寸(合213厘米),可利用起重机等操作设施从岸上或舰上布放。
②大型自主潜航器: 直径在21〜84英寸(合53〜213厘米)之间,可通过“弗吉尼亚”级潜艇有效载荷模块、巡航导弹核潜艇有效载荷发射管及其他合适的水面舰艇布放,也可通过操作设施从岸上或舰上布放。
③中型自主潜航器:直径在10〜21英寸(合25〜53 厘米)之间,可通过潜艇标准鱼雷发射管、大型鱼雷发射管、垂直发射系统发射管布放,也可从岸上或水面舰艇上布放。
④小型自主潜航器:直径在3〜10英寸(合7.6〜25厘米)之间,可以是便携式自主潜航器,可通过各种平台(包括较大型自主潜航器)布放,还可通过潜艇布放。
▲美国波音公司研制的大型自推进潜航器'回声旅行者'I Echo Voyager )2. 环境动力型自主潜航器环境动力型自主潜航器大体可分为浮力滑翔机和波浪滑翔机两类。
①浮力滑翔机:通常是通过固定翼将浮力转换为前进动力的小到中型自主潜航器,但此种推进方式在速度方面较为受限。
大多数该类型自主潜航器可通过小型舰艇布放与回收。
②波浪滑翔机:也被归类于无人水面舰艇,该类自主潜航器通常携带类似冲浪板的漂浮板,利用波浪运动可产生1〜2节的推进力,另外,漂浮板表面覆盖着太阳能板,可为滑翔机电池充电。
此类自主潜航器可运行数月之久,可从岸上或舰上布放与回收。
▲美国“滑浪者” Wave Glider )无人系统利用海浪运动产生推力3. 其他可部署的水下传感器和通信系统其他系统包括隐蔽型探测系统,能源补给、数据管理与通信基础设施等。
美军水下无人系统发展探讨
美军水下无人系统发展探讨海军装备部摘要:美军试图通过大力发展以自主潜航器为主体的水下战无人装备,加强前沿水下无人系统预置,全力推进水下无人区域监控系统布建,突出攻关水下自主导航、通信组网、自主协同等先进技术,打造新型水下作战体系。
本文对美军的水下无人系统的发展进行了论述。
关键词:水下无人系统;美国海军;无人潜航器;水下战1 突出水下无人系统对于联合作战的重要性长期以来,美国海军对于水下无人系统的研发和应用更多偏重于执行ISR和反水雷等作战辅助任务。
随着海军作战能力需求的变化,水下无人系统能力的提升,美国海军正重新审视水下无人系统在联合作战中的地位与作用。
1.1 积极利用水下无人系统增强水下综合作战能力美国海军认为,美国的潜在对手正在构建能对美军舰艇及水下基础设施形成威胁的能力,美国在水下战领域的优势正不断被削弱。
而核潜艇等先进水下平台,由于建造和使用成本高昂,数量上无法完全满足作战需求,迫切需要补充新型作战力量,与潜艇形成优势互补,从而增强综合水下战能力。
《下一代水下无人系统》报告指出,水下无人系统能够有效补充并拓展有人水下系统的能力,对当前因缺乏有效作战手段而难以执行的军事任务,可由无人作战系统来完成,即便是核潜艇能够完成的任务,水下无人系统的协同和配合也能大幅提高作战效能。
1.2 积极增强水下无人系统跨域协同作战能力如何充分发挥水下作战优势以弥补其他作战领域面临的严峻挑战,是美国海军重点关注的问题。
创造性地使用水下无人系统,能为美国海军提供全新作战能力。
美国海军认为,未来水下无人系统的应用模式将主要是联合使用和分布式作战,联合形式包括:多形态无人系统跨域协同或组网、异构无人系统协同或组网、子母式无人系统接力作战、跨介质组合式无人系统等。
美国海军于2016年“先进海军技术演习”期间,演示了“潜艇-无人潜航器-无人机”子母式协同作战的能力。
上浮式有效载荷和深海预置武器等新概念装备的出现,也可视为该努力的一部分。
海洋科技前沿 自主水下航行器导航技术发展现状与分析
科技前沿▏自主水下航行器导航技术发展现状与分析近年来,随着微电子、人工智能和新兴量子导航等技术的快速发展,极大地推动了海洋技术前沿领域相关技术的进步,无人水下航行器技术已经成为各海洋强国争先发展的重点领域。
2017年,美国国防高级探究计划局称计划开发深海定位导航系统,该系统能够为各种载有该移动工作端的水下目标提供实时、连续、稳点以及精确的导航信息。
自主水下航行器(AUV)具有活动范围大、机动性强、智能化程度高等优点,在海洋调查、海洋资源勘探、水下搜救、潜水支援、军事侦探等领域有重大利用价值。
当前,导航问题是AUV所面临的关键挑战之一,由于受到海水介质物理特性的限制和海洋环境条件的影响,水下导航技术面临可用信息源少、水下干扰多、惯性传感器精度难以提升技术难题一直没有被很好地解决。
近些年,随着激光陀螺仪、光纤陀螺仪和小型化及数字化多普勒测速仪(DVL)的出现,大幅度提高了运动速度和航向的测量精度,为AUV组合导航系统的构建提供了关键配套技术和器件。
当前,我国惯性导航技术和国外有很大差距,主要体现在惯性系统总体精度和功能特性,惯性传感器精度,组合滤波算法等方面,在协同导航领域还处于跟跑状态。
陀螺仪的精度对惯性导航的精度起着决定性的作用,近几年新兴起来的基于超冷原子的量子导航技术可使陀螺仪的精度提高3个数量级以上,这将有望使全空域、全时域的无缝导航成为可能。
本文以近十年的研究成果为主,综述典型水下导航技术的应用现状及技术瓶颈,并提出解决技术问题的关键思路。
在此基础上,从3个维度对未来水下导航技术进行了展望。
一、惯性导航技术惯性导航系统(INS)具有完全自主式、隐蔽性好等优点,可以实时输出高精度的位置、姿态、速度信息,适用于全自主水下长时间导航需求,此外还可以方便地与其他导航技术相结合,比如DVL、重力仪等,建立组合导航系统,因而成为当前AUV的首选导航方式,尤其对于隐蔽性要求很高的军事用途的AUV。
随着INS不断发展,一些新型的惯性定位系统也不断涌现,如光子惯性导航系统(PHINS)。
世界无人水面艇发展综述

世界无人水面艇发展综述无人水面艇(USV,Unmanned Surface Vehicle),是指依靠遥控或自主方式在水面航行的无人化、智能化作战平台。
可通过飞机或大型舰艇携载,到达预定地点后施放,也可直接在基地近岸使用,实现保护己方、打击敌方的作用。
无人水面艇较无人潜航器和无人机的研究起步较晚,但发展迅速,目前已受到世界各海上强国的高度重视。
本文将追溯世界无人水面艇的发展历史,介绍世界各国USV的服役特点与研制情况,分析其关键技术,并展望未来发展趋势。
无人水面艇发展回顾无人水面艇的发展历史最早可以追溯到1898年,当时著名发明家尼古拉・特拉斯发明了名为“无线机器人”的遥控艇。
首次应用于实战则在二战时期,最初设计成鱼雷状用以清除碎浪带的水雷和障碍物。
诺曼底登陆战役期间,盟军为实现其战略欺骗和作战掩护的目的,曾设计出一种装载大量烟幕剂的无人水面艇,可按预先设定的航向机械地驶往欺骗海域,从而造成舰艇编队登陆的假象。
二战后期美国海军还曾通过在小型登陆艇上加装无线电控制的操舵装置和扫雷火箭弹,用于浅海雷区作业。
二战结束后,无人水面艇得到了进一步的发展,主要用于扫雷和战场损伤评估(BDA)等任务,如1946年的“十字路口行动”中,原子弹每次爆炸后,均使用无人水面艇收集辐射水域样品。
到20世纪60年代,苏联研制了小型遥控式无人水面艇,用于向敌方舰艇发动自杀式的撞击爆炸性攻击。
这一时期,美国将一型V-8汽油机驱动的7米玻璃钢小艇改装为遥控扫雷艇,配备到胡志明市南部的第113水雷分队,用于越南境内的扫雷作业。
20世纪70~80年代,由于技术的限制,无人水面艇发展并未获得很大突破,主要应用于军事演习和火炮射击的海上靶标。
20世纪90年代,美国研制的遥控猎雷作战原型(RMOP)艇成功在波斯湾从“库欣”号驱逐舰进行了海上作业。
1997年1~2月的“SHAREM 119”演习中,RMOP进行了长达12天的猎雷行动。
随着信息技术、自动控制技术、导航技术及材料科学等方面的进步,无人水面艇技术也得到了新的发展,截止目前,已有十几个国家研制、部署了无人水面艇。
美国海军无人作战能力建设发展分析
美国海军无人作战能力建设发展分析
陈楠楠;沈良;刘颜鹏
【期刊名称】《指挥信息系统与技术》
【年(卷),期】2024(15)1
【摘要】从作战理论、作战模式和作战装备建设等方面,对美海军无人作战能力建设发展进行了分析。
阐述了分布式作战和马赛克战的作战概念,介绍了有人-无人协同作战和无人集群作战方式,分析了无人水面艇、无人潜航器和无人机的典型型号,从而为他国海军的无人系统建设提供参考。
【总页数】6页(P45-50)
【作者】陈楠楠;沈良;刘颜鹏
【作者单位】海装上海局驻上海地区第八军事代表室;中国电子科技集团公司第二十八研究所
【正文语种】中文
【中图分类】TP24;E939
【相关文献】
1.美国海军发展网络中心作战能力的启示
2.美国海军无人系统作战特点及关键技术分析
3.美国海军无人机的发展及作战使用
4.美国海军近海反潜战作战能力的发展方向
5.美国海军无人作战系统分析
因版权原因,仅展示原文概要,查看原文内容请购买。
未来超级武器:无人水下航行器将大有作为
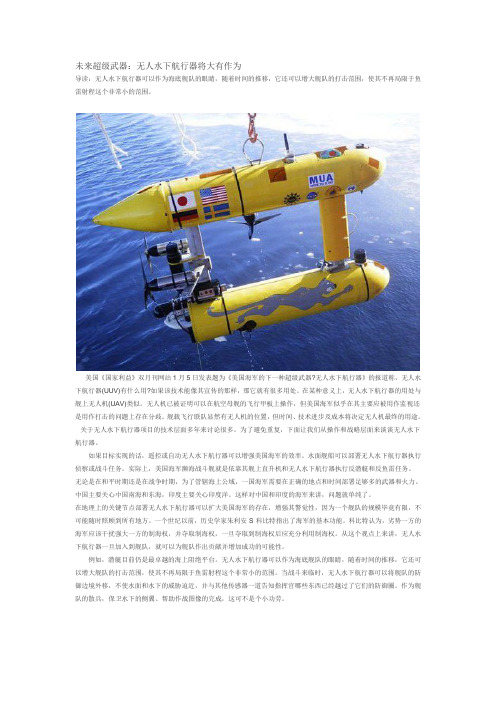
未来超级武器:无人水下航行器将大有作为导读:无人水下航行器可以作为海底舰队的眼睛,随着时间的推移,它还可以增大舰队的打击范围,使其不再局限于鱼雷射程这个非常小的范围。
美国《国家利益》双月刊网站1月5日发表题为《美国海军的下一种超级武器?无人水下航行器》的报道称,无人水下航行器(UUV)有什么用?如果该技术能像其宣传的那样,那它就有很多用处。
在某种意义上,无人水下航行器的用处与舰上无人机(UAV)类似。
无人机已被证明可以在航空母舰的飞行甲板上操作,但美国海军似乎在其主要应被用作监视还是用作打击的问题上存在分歧。
舰载飞行联队显然有无人机的位置,但时间、技术进步及成本将决定无人机最终的用途。
关于无人水下航行器项目的技术层面多年来讨论很多。
为了避免重复,下面让我们从操作和战略层面来谈谈无人水下航行器。
如果目标实现的话,遥控或自动无人水下航行器可以增强美国海军的效率。
水面舰船可以部署无人水下航行器执行侦察或战斗任务。
实际上,美国海军濒海战斗舰就是依靠其舰上直升机和无人水下航行器执行反潜艇和反鱼雷任务。
无论是在和平时期还是在战争时期,为了管辖海上公域,一国海军需要在正确的地点和时间部署足够多的武器和火力。
中国主要关心中国南海和东海,印度主要关心印度洋。
这样对中国和印度的海军来讲,问题就单纯了。
在地理上的关键节点部署无人水下航行器可以扩大美国海军的存在,增强其警觉性,因为一个舰队的规模毕竟有限,不可能随时照顾到所有地方。
一个世纪以前,历史学家朱利安·S·科比特指出了海军的基本功能。
科比特认为,劣势一方的海军应该干扰强大一方的制海权,并夺取制海权,一旦夺取到制海权后应充分利用制海权。
从这个观点上来讲,无人水下航行器一旦加入到舰队,就可以为舰队作出贡献并增加成功的可能性。
例如,潜艇目前仍是最卓越的海上阻绝平台。
无人水下航行器可以作为海底舰队的眼睛,随着时间的推移,它还可以增大舰队的打击范围,使其不再局限于鱼雷射程这个非常小的范围。
国外水下无人装备研究现状及发展趋势

一、国外水下无人装备现状本文以水下无人航行器、水下预置装备、水下监听网等典型水下无人装备的研究现状及典型项目案例为牵引,综述国外水下无人装备的发展现状。
⒈水下无人航行器水下无人航行器(UUV)也称无人潜航器,美海军将UUV定义为无人、自带能源、自推进、自主控制(预编程或实时自适应使命控制)或最低程度监控、无缆(除数据光纤)的潜器;俄罗斯海洋科学技术研究所将UUV定义为能够在预定海域深度范围内,按照预编程轨迹航行并完成需要作业的装有仪器设备的潜器。
⑴UUV的发展现状UUV起源于20世纪50年代末,但由于技术条件限制,致使UUV发展缓慢,80年代以后,随着计算机性能的提升、水声通信技术的突破,UUV开始具备半自主控制能力。
21世纪以来,伴随着智能算法的应用、海洋资源的探索及军备竞争的需要,在军民科研领域掀起了UUV研究热潮,各种新概念、新方向被提出,UUV的自主控制水平得到进一步提高,其任务开始从反水雷向反潜、水下侦察、探测与识别等领域扩展。
美国是最早研究、研制UUV且技术最先进的国家,主要的UUV产品有蓝鳍金枪鱼机器人公司的Bluefin系列、WHOI的ABEAUV、Oceanserver公司的IverAUV等,军用UUV的典型型号有便携式的SAHRV、轻型的SMCM和重型的BPAUV等;欧洲国家在UUV的发展上仅此于美国,主要的UUV产品有挪威的REMUS系列(交付美海军)及HUGIN系列、法国的Alister系列、瑞典的SAAB 系列、英国的Autosub系列和Tailsman系列、德国的seaOtterMK系列。
另外,我国周边的俄罗斯和日本在UUV研究方面也具备较高的水平,例如俄罗斯海洋技术研究所的SKATAUV和MT-88AUV、日本海洋科学技术中心的深海型URASHIMAAUV等。
⑵UUV典型分类随着水下作业需求的增加,更多适应不同工作需求的水下无人航行器研制并应用,按照结构及工作模式,主要分为遥控水下航行器(ROV)和自主水下航行器(UUV)。
美国海军水下作战发展探讨

美国海军水下作战发展探讨摘要:在界定水下作战内涵与范围的基础上,全面归纳了美军水下作战的发展历程,从美军水下作战的发展体系、网络、武器、装备、技术等方面较为系统地分析其发展现状、规律和特点并预测其未来发展趋势。
关键词:美军;水下作战;发展;现状;趋势1 引言水下作战是指利用潜艇和其他水下系统在水下及从水下发起的进攻性或防御性军事行动,包括监视、部署特种部队,以及摧毁或压制敌方部队和水下基础设施。
具体包括潜艇战、反潜战、水雷战和反水雷战、水下无人平台作战、水下信息监视和情报侦察、水声对抗、水下信息传输和指挥控制等。
2 美军水下作战发展概况冷战结束后,世界濒海国家迅速装备常规潜艇,对近海作战行动构成了较大威胁。
为此,自20世纪90年代以来,在“21世纪海上力量”和“由海向陆”等国防部顶层方针的指引下,美海军的战略重点逐渐由深海向浅海转移。
由于浅海中的声场环境异常复杂,电磁波无法实现远距离信息传输,而水声信道的不稳定性又对新世纪水下作战的信息优势提出了挑战,因此濒海水域作战大大增加了探潜、反潜和猎雷的难度,要求美海军必须增加水下探测距离和分辨率、提高水下作战场信息控制能力,扩大水声预警探测范围。
这些作战需求驱动着水下作战的发展。
1997年,美海军提出了“网络中心战”的概念,随后提出网络中心反潜战,并开始深入研究作战理论,研制相关设备,加速进行以平台为中心的反潜战向以网络为中心的反潜战过渡,美军水下作战的主要模式逐渐向水下网络中心战转变。
纵观美军水下作战发展历程,其主要特点一是反潜机制趋于联合。
为实现反潜作战指挥、装备技术以及情报共享机制方面的无缝链接,美军联合日本设立了“美日反潜战中心”,成立了“海上联合反潜作战指挥协调组”,基本形成了“美军主导、日台配合、广泛监控、重点封堵”的反潜格局。
二是运用多种兵力手段进行综合反潜。
针对潜艇行动的不同阶段,采取不同的侦察探测手段、兵力使用强度和反潜搜索样式,基本实现了对潜艇出航、航渡、大洋活动全过程、全航态、全方向的立体探测。
一文看懂水下机器人的发展及应用
一文看懂水下机器人的发展及应用水下机器人(Underwater Robot)是指能够在水下环境中进行工作和行动的机器人。
随着科技的不断发展,水下机器人在海洋资源开发、环境监测、海洋科学研究、维修、救援等领域得到了广泛应用,并取得了一系列的成果。
本文将就水下机器人的发展历程以及其应用进行简要介绍。
水下机器人的发展始于20世纪60年代。
当时,水下机器人主要被用于军事目的,如潜艇的敌对水下活动监测。
此后,水下机器人的应用逐渐扩展到了科学研究与商业领域。
1985年,美国海军研究办公室(ONR)开展了水下机器人技术的研究与开发计划,推动了水下机器人的快速发展。
随着计算机技术、传感器技术和通信技术的进步,水下机器人的功能和性能得到了极大的提高。
水下机器人的应用领域非常广泛。
在海洋资源开发方面,水下机器人可以进行海底油气资源勘探、海底矿产资源调查与开采等工作,大大提高了资源开发的效率和安全性。
在海洋科学研究领域,水下机器人可以进行水下生物调查、海底地形测绘、海洋环境监测等工作,为科学家们提供了大量的珍贵数据。
在航道维护与救援领域,水下机器人可以进行船体检查与维护、海底障碍物清除、海上救援行动等工作,提高了航道安全性和救援效率。
除了上述领域,水下机器人还被广泛应用于海底考古、水下考古、海洋文化遗产保护等工作。
通过水下机器人的使用,考古学家和文物保护专家可以更好地保护和研究海洋文化遗产,探寻历史的未知。
水下机器人的发展还面临一些挑战。
首先是技术挑战。
水下机器人需要在极端的水下环境中工作,对其性能、稳定性和可靠性提出了更高的要求。
其次是能源挑战。
由于水下机器人需要长时间在水下工作,因此对于其能源供应的需求也很大。
目前,水下机器人主要依靠电池供电,能源续航能力有限。
解决能源问题是发展水下机器人的重要课题。
总的来说,水下机器人的发展与应用为人们认识和开发海洋提供了新的手段和技术支持。
随着科技的不断进步,水下机器人的功能和性能将会不断提升,进一步推动海洋领域的发展和利用。
国外AUV研发现状综述
国外AUV研发现状资料(一):以下资料来自:(1)美国根据1994年美国海军制定的水下无人航行器(UUV)发展计划,包括AUV和ROV(遥控航行器)两个方面的研究涉及五个领域:运载器、能源、传感器、导航与控制、通信。
其它方面的研究包括:1)AUV和ROV探测网反潜的研究,利用探测网进行水下三维探测,通过就地采样或层析获得的环境信息有利于提高反潜探测,同时还可以利用多个小型分散平台与有人平台一起构成反潜作战探测网;2)作为武器平台,携带近程攻防武器对敌方潜艇进行秘密攻击;3)布设水下通信网络;4)进行海洋探测。
美国海军主要研制UUV的单位包括:美国海军水下作战中心(NUWC)、美国海军研究局(ONR)、美国海军海洋系统中心(NAVOCEANO)、美国海军空间和海战(SPAWAR)系统中心、美国国防高级研究计划局(DARPA)和查尔斯·斯塔克·德雷珀实验室(CSDL)、美国海军研究生院(NPS)等。
此外,麻省理工学院、Woods Hole海洋研究所、通用动力公司和雷声公司、洛克希德导弹和宇航公司、佩里技术公司等,下面分别就各单位的AUV研发情况进行介绍。
美国海军空间和海战(SPAWAR)系统中心:该中心主要从事AUV的指挥和控制系统、光纤和水声通信系统、非金属材料和运载器总体的研制。
该中心拥有三个UUV试验运载器:先进的无人搜索系统(AUSS)、自游者II(Free Swimmer II-SFII)和飞行插塞(Flying Plug)。
AUSS是一个用于深海搜索的鱼雷形AUV,全长5200mm,直径800mm,重量1230kg,以最大速度6kn航行航力为10小时,采用20kWh 银锌电池,推进装置为2个垂直推进器和2个纵向推进器。
AUSS带有水声通信设备,可在水深6000m的水下向水面传送侧视声纳数据或CCD电视信号,AUSS是自主式的,它对目标的搜索时间只需常规拖曳式搜索系统的1/10。
美海军海上无人系统及数字化发展
美海军海上无人系统及数字化发展来源:全球航空资讯作者:远航根据美国海军未来舰队发展计划,未来30年,美国海军将大力发展海上无人系统,并重点瞄准这类系统发展数字基础设施。
但是,美海军海上无人系统在成本预算、战略目标、组织管理及原型开发方法等方面,目前还存在着一系列问题2022年4月,美国政府问责局(GAO)发布最新评估报告,对这些问题进行了评估。
一、海上无人系统主要项目(1)主要项目美国海军正在开发六类大型海上无人系统原型。
其中四类由海军采办组织即“海上无人系统办公室下无人和小型战斗系统项目办公室”(PEO USC)发起。
另外两类原型由国防部科技机构组织发起,包括DARPA、国防部长战略能力办公室和海军研究办公室。
目前,这两类原型开发工作也已移交给PEO USC。
海上猎人/海鹰(Sea Hunter/Seahawk)中排量无人水面舰艇发起机构:DARPA/海军研究办公室重要事件:•2018 年 6 月,带有侦察载荷的海军演习•2020 年 9 月,先进自主性和感知能力演习•2021 年 4 月,秘密有效载荷演习原型数量:已交付2艘,计划中0艘潜在任务:支持中型无人水面舰艇(MUSV)和大型无人水面舰艇(LUSV)开发霸王无人水面舰艇(Overlord Unmanned Surface Vessel)发起机构:国防部战略能力办公室/海上无人系统项目办公室重要事件:•2020年10月和2021年4月,对两种可用原型开展从墨西哥湾沿岸地区到西海岸的自主运输演习•2020年12月,电子战有效载荷海军演习原型数量:已交付2艘,另有2艘计划2023财年交付潜在任务:支持中型无人水面舰艇(MUSV)和大型无人水面舰艇(LUSV)开发大型无人水面舰艇(LUSV)发起机构:海上无人系统项目办公室重要事件:•2019 年 9 月,海军授出价值 4200 万美元的六项概念设计研究•根据2021财年预算,海军决定推迟采购原型数量:交付0艘,打算将开发计划变更为主要能力采购潜在任务:海上作战中型无人水面舰艇(MUSV)发起机构:海上无人系统项目办公室重要事件:•2019 年 7 月,海军授予 L3 Harris 公司价值 3500 万美元的制造合同,预计在 2023 财年第二季度交付原型数量:交付0艘,已定计划开发2艘,在拟合同7艘潜在任务:具有可互换有效载荷,任务多功能舰艇,可执行监视和电子战任务“乌鳢”大排量水下无人艇(LDUUV)发起机构:海上无人系统项目办公室重要事件:•2012年,作为采购计划启动,但在2017年才制定加速研发工作•政府主导的原型将于 2022 财年交付•2021年发布两艘生产原型征求建议书原型数量:1艘在建,2艘计划短期内开发潜在任务:具有可互换有效载荷,任务多功能舰艇,可执行监视和电子战任务“逆戟鲸”超大型无人水下航行器 (XLUUV)发起机构:海上无人系统项目办公室重要事件:•2017年3月,海军授予波音公司一份价值2.74亿美元的合同•因持续的生产问题,第一艘XLUUV的交付将延迟21个月至2022年9月完成原型数量:已交付0艘,5艘在建,在拟合同4艘,打算将开发计划变更为主要能力采购潜在任务:用于海底战争的模块化有效载荷(2)美国海军对海上无人系统的研究情况海上无人系统是美国海军舰队现代化方案的一个重要组成。
国外AUV研发现状综述

国外A U V研发现状综述 SANY GROUP system office room 【SANYUA16H-国外AUV研发现状资料(一):以下资料来自:(1)美国根据1994年美国海军制定的水下无人航行器(UUV)发展计划,包括AUV和ROV(遥控航行器)两个方面的研究涉及五个领域:运载器、能源、传感器、导航与控制、通信。
其它方面的研究包括:1)AUV和ROV探测网反潜的研究,利用探测网进行水下三维探测,通过就地采样或层析获得的环境信息有利于提高反潜探测,同时还可以利用多个小型分散平台与有人平台一起构成反潜作战探测网;2)作为武器平台,携带近程攻防武器对敌方潜艇进行秘密攻击;3)布设水下通信网络;4)进行海洋探测。
美国海军主要研制UUV的单位包括:美国海军水下作战中心(NUWC)、美国海军研究局(ONR)、美国海军海洋系统中心(NAVOCEANO)、美国海军空间和海战(SPAWAR)系统中心、美国国防高级研究计划局(DARPA)和查尔斯·斯塔克·德雷珀实验室(CSDL)、美国海军研究生院(NPS)等。
此外,麻省理工学院、Woods Hole海洋研究所、通用动力公司和雷声公司、洛克希德导弹和宇航公司、佩里技术公司等,下面分别就各单位的AUV研发情况进行介绍。
美国海军空间和海战(SPAWAR)系统中心:该中心主要从事AUV的指挥和控制系统、光纤和水声通信系统、非金属材料和运载器总体的研制。
该中心拥有三个UUV试验运载器:先进的无人搜索系统(AUSS)、自游者II (Free Swimmer II-SFII)和飞行插塞(Flying Plug)。
AUSS是一个用于深海搜索的鱼雷形AUV,全长5200mm,直径800mm,重量1230kg,以最大速度6kn航行航力为10小时,采用20kWh银锌电池,推进装置为2个垂直推进器和2个纵向推进器。
AUSS带有水声通信设备,可在水深6000m的水下向水面传送侧视声纳数据或CCD电视信号,AUSS是自主式的,它对目标的搜索时间只需常规拖曳式搜索系统的1/10。
美国推进大排量无人水下航行器研制项目
美国推进大排量无人水下航行器研制项目
宋杨
【期刊名称】《舰船科学技术》
【年(卷),期】2012(34)6
【摘要】据航空周刊报道,美国海军研究办公室计划推进无人潜航器项目。
目前研制的大排量无人水下航行器(LDUUV)外形大,自动控制能力强,能够数月远距离执行任务。
它将作为母舰部署,并操作静、动传感器,持久监视沿海水域,最终可能装备武器。
LDUUV能够探测并规避水面和水下的障碍和危险物,通过声呐探测近距离障碍物,其声学传感器能对几英里外的敌舰进行报警。
LDUUV有1个大型的有效载荷舱,可以布放传感器、通信浮标、更小的UUS和武器等。
【总页数】1页(P8-8)
【关键词】无人水下航行器;美国海军;大排量;研制项目;声学传感器;声呐探测;无人潜航器;自动控制
【作者】宋杨
【作者单位】
【正文语种】中文
【中图分类】U674.941
【相关文献】
1.美国研制大型水下无人航行器 [J], 一辉
2.美国海军无人水下航行器研制动向(上) [J], 李波;于霞
3.美国海军无人水下航行器研制动向(下) [J], 李波;于霞
4.美国霍普金斯大学研制出飞鱼型空中水下无人航行器 [J],
5.美国海军推进无人水下航行器的研制 [J], 时兆峰
因版权原因,仅展示原文概要,查看原文内容请购买。