内河航标遥测遥控系统设计
内河航道GPS遥测遥控研究
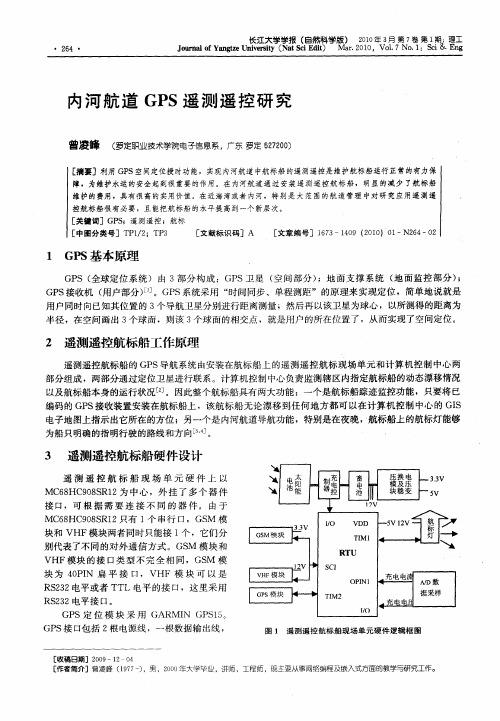
- -5 掣 嘉 模及压 I ~ 蠢 块稳变 l V’ H
1 V ,
VDD TI l M
GS 臭 M
别代 表 了不 同 的对 外通 信方 式 。GS 模 块 和 M VHF模块 的接 口类 型 不 完 全 相 同 ,GS 模 M
块 为 4 P N 扁 平 接 口,VHF 模 块 可 以 是 0I RS 3 2 2电平或 者 T TI 电平 的接 口 ,这 里采 用 RS 3 2 2电平接 口。 GP S定 位 模 块 采 用 GAR N S 5 MI GP I 。 GP S接 口包括 2 电源线 ,一 根数据 输 出线 , 根
遥测 遥控航 标船 的 GP S导航 系统 由安装 在航标 船 上 的遥 测遥 控 航标 现 场 单元 和计 算 机 控制 中心两 部 分组成 ,两 部分通过 定位 卫星进 行联 系 。计 算机 控制 中心负 责监测 辖 区内指定航 标船 的动 态漂移 情况 以及 航标船 本身 的运行 状况 [ 。因此 整个航 标船 具有 两大功 能 :一个是航 标船 踪迹 监控功 能 ,只要将 已 2 ]
用户 同时 向已知其 位置 的 3 导航卫 星分 别进行 距离测 量 ;然后再 以该 卫星 为球心 ,以所 测得 的距离 为 个
半径 ,在空 间画 出 3个球 面 ,则 该 3个球 面的相 交点 ,就是 用户 的所在 位置 了 ,从 而实现 了空 间定位 。
2 遥 测 遥 控航 标 船 工 作 原理
的经纬度 ,而且 每隔 1 发送 一次经 纬度数 据 。G S的 电源是 通过 开关 来 控制 的。R U ( e t Tr nl s P T R moe e a mi Unt 隔一定 时间对 G S进行 数据采样 ,以判 断遥测 遥控航标 船是否超 出漂移 范 围,在 不需要使用 G S i )每 P P 的时 间里将 GP S的 电源完全关 闭 ,在需 要通信 的时候 提前 l n将 G S模 块开启 。 mi P 航 标灯和 R U 之 间的通信是 全双工 通 信 。R U使 用 TI T T M1的 2个 时 间通道 来分 别模 拟 输人 和 输 出。 TM1的 C NN L 信道根 据波特率 和发送 的数据来 产生一定 的波形 ,采用输 出 比较 功能实现 。T M1的 I HA E l L C HAN L 信道 模拟航 标灯 的数 据输入 ,首先工 作 于输入 捕 捉状 态 ,捕捉 到起 始位 后 切换 到输 出 比较方 NE 0 式 ,根 据输入 的 电平来 获得每一 个位 (i 的数 据 。A/ bt ) - D数据采样 信号 ,一路是太 阳能 电压 采样 ,通过 采
遥测遥控航标的设计资料

摘要我国是世界上河流众多的国家之一,数量多,流程长,而且很多河流水域具有重要的航运价值。
然而我国许多河流一年之中水位变化频繁,水位发生变化后,指示航标极易偏离初始位置,无法准确指示航道位置,影响航行、人身及财产安全。
为了提高航标维护人员的工作效率,降低人工维护成本,遥测遥控无人值守的自动航标系统的研究应用势在必行。
本文主要研究了基于GSM短消息服务功能、GPS定位系统的遥控遥测航标系统的设计与应用。
本设计中,采用模块化的设计思想,将整个系统分为控制中心和航标船两个子系统,分别对控制中心的水位监测单元,报警单元和航标船的中心处理单元,供电单元,动力制动单元,GPS定位单元,船体故障检测单元以及连接二者的GSM无线通信单元从方案可行性,到电路设计,再到程序设计作了详细的研究与分析,最终完成了整个的设计。
该系统通过监控中心实时检测河流水位异常信息,通过GSM网络的短信功能,将异常信息发送给航标船。
航标船接收异常信息,根据水位信息作出相应的调整,保证船体始终能够正确导航。
关键词:航标船,遥控遥测,GSM,GPSABSTRACTChina is one of the countries that have many of rivers in the world not only the huge number, but also the long process. Many of them have the important value in shaping. However , the level of these rivers changes frequently in a year, making the indicating mark deviates from the initial position highly, so the indicating mark can not indicate the accurate channel position ,probably affecting navigation ,personal and property safety. In order to improve the navigation aid maintenance personnel’s working efficiency and reduce artificial maintenance costs, the research and application of automatic navigation system of remoting unattended is imperative.This paper mainly studies the design and application of remote control and telemetry navigation system of GPS positioning system,based on the GSM short message service function.This design adopts the idea of modular design,and the whole system is divided into the control center and the navigation mark ship two subsystems,this design respectively research on water level monitoring unit of control center, an alarm unit and the central processing unit of the navigation mark ship, power supply unit, dynamic braking unit,GPS positioning unit, The fault detection unit of the ship and the GSM wireless communication unit connected between them,from the feasibility of the scheme, the circuit design, and then to the program design makes a detailed research and analysis, and finally finished the whole design.The system through the control center detects the abnormal information of river water level real time,sends the abnormal information to the navigation mark ship through the GSM network short message function.when navigation mark ship receives the abnormal information,it will adjust the water level information according to the water level information, to ensure correct navigation all time.KEY WORDS: b uoy boat, telemetry and remote control , GSM ,GPS目录第1章绪论 (1)1.1 遥控遥测简介 (1)1.2 测量与控制中数据通信的要求 (2)1.3 遥测遥控航标的研究背景 (2)1.4遥测遥控航标设计任务 (2)第2章遥测遥控航标系统分析 (4)2.1 系统结构功能分析 (4)2.1.1 监控中心 (4)2.1.2 航标船 (5)2.2 方案可行性分析 (7)2.2.1 中心处理单元的选择 (7)2.2.2 GSM无线通信模块的选择 (8)2.2.3 GPS模块的选择 (10)第3章系统电路设计 (11)3.1 航标船系统电路设计 (11)3.1.1 中心处理单元 (11)3.1.2 航标船供电模块的设计 (13)3.1.3 航标船动力、制动模块的设计 (14)3.1.4 GSM无线通信模块 (15)3.1.5 GPS电路的设计 (19)3.1.6 船体故障检测单元 (20)3.2 监控中心系统电路设计 (22)3.2.1报警电路设计 (22)3.2.2水位监测单元 (22)第4章系统软件程序设计 (24)4.1系统软件开发平台 (24)4.2系统整体设计流程 (24)4.3模块化程序设计 (25)4.3.1水位检测子程序设计 (26)4.3.2 GSM通信子程序设计 (27)4.3.3 船体故障子程序设计 (28)4.3.4 GPS模块子程序设计 (29)第5章结论 (30)致谢 (31)参考文献 (32)附录第1章绪论1.1 遥控遥测简介遥控技术是指对受控对象进行远距离控制和监测,利用自动控制技术、通信技术的一项综合性技术。
基于无线传感网络与AIS的航标遥测遥控系统的设计与实际应用

基于无线传感网络与AIS的航标遥测遥控系统的设计与实际应用摘要:航标是一种水上船只进行各种活动时提供相关安全信息的设备,所以航标设备的质量和功能会直接影响到水上船只的运行安全。
航标遥测遥控系统是一种可以有效解决过去航标相互独立的缺点,将船只的航标连接到控制站,进而形成系统网络,并可以根据控制站对航标发布各种命令。
但是航标遥测遥控系统属于一种新技术,在实际使用中还有很多不足有待解决,例如,误差多、功率大、防水能力差、性能不稳定等,因此航标遥测遥控系统需要结合更多先进的技术进行完善,其中无线传感网络、AIS技术等对航标遥测遥控系统都能够有很好的改进效果。
关键词:无线传感网络;AIS;航标;遥测遥控系统前言:通过降低航标的操作端功率消耗,完善航标遥测遥控系统的控制模式,都可以提高航标设备的实际使用效果。
通过无线传感网络以及AIS技术可以对航标遥测遥控系统进行更有效的改善。
因此在设计的过程中需要对硬件和软件进行优化,包括硬件中的电源系统、电路系统、信息采集系统、控制系统、接口设备等,在软件中需要设计通讯系统、软件结构、航标算法等。
通过无线传感网络以及AIS技术对航标遥测遥控系统进行改进,不仅可以有效解决航标设备的不足之处,更可以进一步推动水上船只交通安全工作的发展。
一、航标遥测遥控系统构成航标遥测遥控系统主要是由航标的控制中心、通讯系统以及航标遥测遥控系统终端这三个部分构成[1]。
其中,航标遥测遥控系统的控制中心主要对系统终端位置收集航标的各种信息,对这些数据信息进行存储、分析、编辑、生成、归类、处理、显示、打印等,并最终形成航标系统所需的数据报表。
在航标遥测遥控系统的控制中心可以通过图像化的操作界面对数据进行查询、监视、分析等操作,然后向系统终端发送命令,实时检测航标的运行情况。
此外,控制中心的数据信息将会与系统的数据共享,为国家的航标监控系统发送信息,控制中心的网络模块能够为终端提供远程服务[2]。
遥测遥控航标的设计与应用

遥测遥控航标的设计与应用
,航标指示灯使用太阳能一体化闪灯。
2 控制系统组成及工作原理控制系统是系统的核心,由中心处理单元、GSM 无线通信单元、电机驱动模块、制动单元、GPS 定位单元和传感器单元组成。
控制系统原理如图2 所示。
遥测遥控航标系统靠太阳能供电模块维持日常通讯及控制工作。
当水位变
化超出设定门限,监控中心根据当前水位变化计算缆长调整量,并下发缆长调整信息给航标船,航标船GSM 无线通讯单元接收信息并通过串口转发给中心处理单元;中心处理单元应答指令并驱动电机调整缆长,调整完毕后,中心处理单元通过GSM 无线通讯单元,向监控中心上传调整结束状态信息。
指示航标系统定时开启GPS 定位单元获得航标船当前的经纬度信息,通过GSM 无线通讯单元发送至监控中心,监控中心参考GPS 信息确认航标是否调整到预定位置。
监控中心将定时发送工况询问指令,指示航标回复电压、电流、定位、故障等信息。
tips:感谢大家的阅读,本文由我司收集整编。
仅供参阅!。
基于单北斗定位及北斗短报文通讯的航标遥测遥控终端设计

终端应答通讯平台数据
图2 航标遥测遥控终端系统基于北斗短报文通 讯方式工作流程(下行)
图1 航标遥测遥控终端系统基于北斗短报文通讯 方式工作流程(上行)
基于北斗短报文通讯方式的 R T U 下行工作 流 程 与上行类似,即业 务平台通过以上工作流程逆向双工地 对RTU实施系统设置、系统重启和远 程 升 级等。航 道 动 态 通 讯平台基于北 斗短报文通讯方式向RTU传输数据 的下行工作流程见图2。
RTU集成的北斗通信模块包括收 发射频芯片,基带芯片,PA电路(10W) 及LNA电路,同时还集成北斗/GPS 双 模导航 模 块,可通 过内置 无 源 天 线即 可实现北斗一代的短报文通信功能和 北斗B1+GPS L1 的联合定位导航功 能。系统集成度高,体积小。
终端采用北斗短报文通讯方式 向业务平台报送数据的上行工作流程 见图1。
本模块设计中的通信管理在设计 平台中的主要作用为航道信息交互的 纽带,协议 处 理 模 块 主要 作用保证各 信息处理插件能够按照协议进行信息 入参和出参间的传递,通信检测模块 的主要作用为报文间能够按照不同方 式进行通信方式的切换。
航标遥测遥控终端RTU与航道 通 讯平台间 采 用北 斗 短 报 文 通 信 方 式 。航 标 遥测 遥 控 终 端 R T U定 时、定 时 刻向服 务端 上传 数 据 、主动 发 送 报 警 报 文、响 应 航 道 动 态 通 讯平台查询 及设置。
3.北斗短报文通讯功能可行性 北斗通信模块将来自控制系统的
信息调制后,在1616MHz信道上发射 航 标信息,在2492 MHz信道 上接收 到 运 营 中心返 回的回执信息 。航 标信 息按照设定的周期上报时间及定时刻 上报时间发射数据,无论是否接收到 回执信息。北斗通信模块配备唯一的 SIM卡。
航标遥测遥控系统的设计与实现

Ab tac Th e r ls r c u e a d f n to o t e r m o e m e ei nd c n r l y tm ee i r du e sr t e g nea tu t r n u c ins f h e t trng a o to s se w r nto c d brel ify,whih i omp e h ihtd t o lcin t r i l heGSM b i tc r e p nd nc ,t up r ii n c sc os doft e l aa c le to e m na ,t g pu lcne o r s o e e hes e vso c n e ft r ia n hes e vso u tm e em i a t .Thes se c n t et nfr ai a u a ga e t ro e m n la d t up r iin c so rtr n le c y t m a sor hei o m ton d t m ofn vi — to lad n daa a eoft vg to a isc ntr,g neat her p r or so ie e e y h d i ita in ina i si tb s hena i a in lad e e e r e t e o tf m rflsne d d b t ea m ns r to
1 总 体 设 计
系统建立起 来 的一个 现代化 的远程 实
d p rme t ,s n o t ea sg e fie y c mp t rn t r si r e o h h p ig a mi i r t n d p rme t e a t n s e d t h s in d o f sb o u e e wo k o d rf rt es ip n d n s a i e a t n s c n t o
航标遥测遥控系统的设计和实现
大连理工大学专业学位硕士学位论文图3.1遥测遥控结构图Fig.3.1ThecompositionofTelemeteringandTelecontro!System图3.2终端站结构图Fig.3.2Thecompositionofterminalstation3.4.2终端站的功能终端站计算机控制系统直接安装于航标设备现场,采集系统所要求的监测数据,控制航标设备正常运行,同时接受和完成监测站下达的遥控操作指令,实现系统对现场设备的遥测与遥控功能。
(1)监测功能航标遥测遥控系统的设计与实现(1)轮询分站按照设定的数据采集时间,周期性地向监测站上报航标运行参数。
数据采集周期等于或大于终端站的数据采集周期。
建有实时数据库和历史数据库,并根据需要对数据进行存储、显示、处理、报警,编辑、生成存档、打印和报送监测站所需的各类报表,并按时向监测站上报航标设备运行信息。
(2)事件通讯分站在接收到设定级别的报警信息后,自动上报监测站,由监测站数据报警系统进行数据处理并产生报警信息。
(3)控制通讯在分站,航标设备管理人员可通过图形化人机界面,监视或查询航标设备的运行信息,并可随时向各终端站发送遥控指令,以检查或更改设备运行参数和状态。
监测站在下达遥控操作指令时。
由中继通讯网连通指定分站由分转发操作指令。
图3.3分站的组成Fig.3.3SubstaIioncomposition3.4.5监测站(中心站)的组成监测站设立于航标处,是处级遥测遥控系统的中心。
监测站计算机系统由数据服务器、WEB数据服务器、操作员站、工程师站、数据报表打印机、调制解调器、路由器、公用电话网、IE测览终端组成。
大连理工大学专业学位硕士学位论文图3.4中心站的组成Fig.3.4Centralstationcomposition3.4.6监测站的功能监测站负责从分站及终端采集航标设备运行信息,建立处级实时数据库和历史数据库,并根据要求对数据进行存储、显示、处理、报警和打印,编辑、生成、存档、打印和报送航标管理所需的各类报表。
浅谈航标遥测遥控系统在航道管理中的应用

浅谈航标遥测遥控系统在航道管理中的应用摘要:随着长江内河航道交通运输业的发展,船舶趋于大型化、高速化,船舶数量和水域交通密度及危险货物装载量不断增加,海上交通事故及经济损失呈增长趋势,严重威胁船舶航行安全及长江内河航道生态环境。
因此,在大力发展长江内河航道交通运输业的同时,应探索运用新的技术,提高海上交通的安全,保护长江内河航道环境。
航标系统是海上交通安全保障体系的重要组成部分。
对航标的有效监控和管理,确保航标信息的准确性,为满足船舶安全航行需求提供更好的服务是非常重要的。
航标遥测遥控系统正是为了满足海事管理部门对航标实时定位测控需要而建立起来的一个现代化的监控系统。
下面,本文对航标遥测遥控系统在航道管理中的应用进行分析。
关键词:航标遥测遥控系统;航道管理;应用航标遥测遥控系统以保障航道安全畅通,提高航道管理效率为根本目标。
航标遥测遥控技术能够有效实现对航标状态的实时监控和自动警报,提高航标维护效率,节约航标管理成本,在保障航道安全畅通的前提下逐步实现延长巡标周期、方便航道管理的良性循环。
1航标遥测遥控系统组成及工作原理1.1系统组成航标遥测遥控系统主要由数字化航标终端、信息传输系统及综合监控系统等3个部分组成。
数字化航标终端:安装在航标上,利用全球卫星定位系统(GPS)和传感器测定航标灯工作状态(包括航标位置、电压、充电电流、闪光周期等参数)。
信息传输系统:主要依靠全球移动通信技术(GSM)、长江专网等构建信息传输通道,以短信息等方式将航标终端上传的信息传回综合监控系统。
综合监控系统:由前置通信机、数据库服务器、地理信息系统(GIS)平台等组成,以电子航道图系统和信息管理系统为基本数据源,将航标终端传输的信息在电子航道图中叠加显示,同时实现对航标相关指令的发送及处理功能。
1.2工作原理航标上安装的数字航道航标终端在每个轮询周期(一般设为2h)通过GPS天线接收GPS信号以测定航标位置,并由传感器测定航标灯工作状态。
内河航标遥控遥测技术应用研究

科 技
朱年龙 周
庆 姚 海 亮
摘 要 通 过对r , 航标遥 控遥测技术 白应用 研究 , xg j 勺 技出该技 术在 实际应用中的不足之处 , 为今后该技术的升级打下扎实的基础。 关键词 : 内河航标 遥测技术
内河 航 标 |置 在缸 、 } 尊 通 航 水域 . 境 比 较 蕴 . 殳 删『 ! 】 环 世 须乘 船 去 转 查 和 维 护 , 护 成 本 报 高 为 悍 讧航 标 正常 率 、 维 E 减 轻 航 标 人 员 的 劳 动 强 度 . 航 标遥 测 管 理 系 统 2I 年 被 立 (m 为 江苏 省 交 通 厅 科 研 项 I 2( 年 研 制 成 功 井 投 ^ 使 川 01 1 经 过 将 近 哪年 试 运 行 . 泼项 口更 趟 于完 善 吏 一目 前 . 已 编制 成功 省 . 、 三 纽 遥 测 同 络 管 理 软 件 , 标 日常 管 州 千 市 县 航 ¨ 吾 种报 表 的 处理 和 传 输 完 全 达 到 无 纸 化 硬 件 采用 国际 先进 的 低功 耗有 高速 处理 能 力 的 单 片 机 和 收 发 模 块 . 有 整 l 具 、 型 化的 特 点 航 标 遥 测 费 用 也 从 最 初 的 ( 1 6元 逝 . 至 0 1 座 降
镇 f辅 区 共 有 航标 4 T 3座 . 分 布 f 苏 南 运 河 、 丹 盘 漂 漕 E 河 九 曲 河 、 资 河 这 4条 等叛 航 道 上 . 中 有 发 光 标 1 高 其 、 7睦
瞥 线标 2 2座 . 同 牌 4 . 指 座 没标 里程 q 6公 里 , 护 理 程 为 维
元, 次 一 座
备
J 刮 风 下雨 . 寒 酷 暑 持 按 制 腰 逃 眦 查标 .『 极 色 严 一 l 怍
内河航标遥控遥测

器要维持正常工作,只有单纯消耗蓄电池电 压,蓄电池内存容量未得到及时补充,致 使其容量损耗较为严重,从而造成蓄电池 电压不足,不能提供航标正常工作所需要 的电压,形成了蓄电池内存电压偏低导致 报警的现象。如九曲河江口1#示位标和九 曲河口5#左右通航标遥测电压折线图所示:
两图对比,5#左右通航标的折线图平缓延 伸,其波动在设定值正常允许范围以内; 九曲河1#示位标的遥测电压则曲折明显且 低压损耗严重,反映出存在长期性的蓄电 池欠压现象。 (2)蓄电池老化,致使报警。我处目前遥 控遥测航标灯器存在蓄电池超年限使用 的情况(使用十年的蓄电池还在工作), 正是因此原因而使蓄电池内阻增大,接板 老化,使其蓄电的实际容量达不到原有容 量100安时的标准,从而导致遥测系统自动
由于苏南运河2#示位标采用的接收太阳能方阵板 每块为20W,一组3块共60W,对于持续高温导致 太阳能充电系统对蓄电池过量充电问题,航标管 理人员通过试验减少一块20W的太阳能方阵板, 使用40W一组的太阳能方阵板,则该航标报警自 动解除,说明减少蓄电池过量充电的压力能消除 报警。
• 原因分析:
交通繁忙,航标的遥控遥测系统要求环照分布均 匀,因此灯器透镜设定为300MM视距9公里,设 置的额定电压值为12V±10%。其他发光标志灯 器透镜设定155MM视距3.5公里,额定电压值为 6V±10%。 1、 降低航标管理成本,节省航标维护经费根据 测算,遥测系统运行后,到现场检查航标2个 月不超过一次。即使按照每月检查航标一次计 算,每座航标一年也可节约4875元,全省发光 航标采用航标自动遥测监控系统后,由于管理 方式从分散的人工管理变为集中的自动管理, 工作量和劳动强度大大降低,每年可节省维护 经费200万元。按此计算镇江辖区9座应用
航标灯不亮,蓄电池电压偏高、偏低、被盗; 航标被撞;标体移动超过20米等故障,系统都 会自动报警,还可以跨区域遥控和测量控制太 阳能和风力电站、无人值守基站,大大的提高 了航标管理与维护的科技含量。
内河无人航道测量船系统设计
内河无人航道测量船系统设计黄国良;徐恒;熊波;洪珺;杨传华【摘要】针对内河传统测量船受人力、物力、时间、吃水等因素的制约而导致的航道信息时效性受限以及浅水区域无法测量等问题,设计了一种用于基于无人船的内河航道信息测量系统.该系统搭载数字测深仪、RTK、GPS、声学多普勒流速剖面仪(ADCP)等设备,利用船舶无人驾驶技术实现航道水深、流速的自动测量,并通过无线传输网络将测量数据实时传送至测量中心,无人航道测量船的应用是未来内河航道测量智能化的重要尝试.【期刊名称】《水运工程》【年(卷),期】2016(000)001【总页数】7页(P162-168)【关键词】水深测量;流速测量;无人船;RTK;GPS【作者】黄国良;徐恒;熊波;洪珺;杨传华【作者单位】武汉理工大学智能交通系统研究中心,武汉湖北430063;中海油能源发展采油服务公司天津,300450;武汉理工大学智能交通系统研究中心,武汉湖北430063;长江武汉航道局,武汉湖北430011;长江武汉航道局,武汉湖北430011;长江武汉航道局,武汉湖北430011【正文语种】中文【中图分类】U644.4随着内河航道尺度的不断提升以及内河电子航道图系统的全面推广应用,航道测量的需求将持续增长、要求不断提高。
传统的航道测量虽然在大规模航道信息采集方面发挥了显著作用,但是航道测量维护成本高,且易受人力、物力、气象、时间及船舶吃水等多因素的制约,只能不定期开展传统航道测量,再加上其内外业数据处理的周期较长,最终对外提供的航道信息服务时效性受限。
此外,由于航道测量船对吃水有一定的要求,在浅水区域无法进行航道测量。
无人船是一种新型的水上勘测装备,一般以小型船舶为平台,可集成定位、导航、视频监控、雷达和控制等设备,装载多种传感器,以遥控或自动控制方式完成军事、救助或测绘等任务,具有吃水浅、机动性高、能耗低等优势。
因此,利用无人船平台开展内河航道测量研究是值得探索的一种测量方式,能够尝试解决当前内河航道测量遇到的问题。
航标遥测遥控系统实现方案的探讨

中图 分 类 号 :U 4 . 641
文献 标 识 码 :B
文 章 编 号 : 10 - 9 2 2 0 )8 0 7 — 5 0 24 7 (0 6 0 — 0 4 0 -
O n Sc m ef rCo s r tn m o eM o io i g an M e urng Sy t m r he o n t uc i g Re t n t r n d as i se f o Na i a i n a k v g to M r s
脉 ,西 起 自然 资 源 丰 富 的 川渝 地 区 ,穿 越 美 丽 的
道 的建设 与发 展 ,对 航 标设 施提 出 了更 高 的要求 , 如 何 根据 长江 航 道 的具 体 晴况 ,实 现航 标 的 标位 、 灯 质 、工 作 状 况 的 电子一 体 化 远 程 管 理 和 对 行 轮
先 实 现 了长 江 下 游 南 京 燕 子 矶 一 苏 太 仓 浏 河 口 江 3 1 1 m 主航 道 以及 8 . k 副航 道 的航 路 改革 . 1. 6k 95 m
航 标 遥 测遥 报 系统 是 近年 来 随着 计 算 机 图形 处 理 、数 字通 信 以及 卫 星定 位 3大 支 撑技 术 的 发 展 与 普及 而迅 速 兴起 的航 标 管理 新 技 术应 用成 果 . 它 是 集 G S I、G M ( 称 3 技 术 为 一 体 P 、GS S 简 G) 的现 代 化 航 标 维 护 管 理 平 台 。是 实 现 长 江 数 字 化 航 道 的前 沿 数 据 采 集 的基 础 性建 设 内容 。其 总 体
t n t ra d me s r e t l h a ia in ma k ,a d p t f r a d c n tu t e s g e t n n f t r lr e o mo i n a u e r mo e y t e n v g t r s n u s o r o sr c i u g s o s o u u e a g — o o w v i s ae c n t c i n o n t r g a d me s r gs se f ri l n a i ai n ma k f rsu y n n n l zn h c l o sr t f u o mo i i n a u n y t m n a d n v g t r sat t d i g a d a ay i g t e o n i o o e
内河航标遥测遥控系统设计
内河航标遥测遥控系统设计孙星;吴勇;初秀民;严新平【期刊名称】《中国航海》【年(卷),期】2011(034)002【摘要】针对内河航标的特点,设计了一种基于无线传感网络的内河航标遥测遥控系统,实现了航标状态的远程监测,并能够进行灯质控制.介绍了系统中主控单元、遥测遥控等模块作用和电路设计,在模块选型、电路设计、应用方法等多方面充分考虑了航标遥测遥控系统的能耗、传输距离、可靠性等要求,利用ZigBee路由算法,并进行了多项测试试验.试验结果表明,该系统能够解决以往类似系统中存在的通信不可靠、能耗过高等问题.【总页数】6页(P5-9,23)【作者】孙星;吴勇;初秀民;严新平【作者单位】武汉理工大学智能交通系统研究中心,湖北武汉430063;水路公路交通安全控制与装备教育部工程研究中心,湖北武汉430063;武汉理工大学智能交通系统研究中心,湖北武汉430063;水路公路交通安全控制与装备教育部工程研究中心,湖北武汉430063;武汉理工大学智能交通系统研究中心,湖北武汉430063;水路公路交通安全控制与装备教育部工程研究中心,湖北武汉430063;武汉理工大学智能交通系统研究中心,湖北武汉430063;水路公路交通安全控制与装备教育部工程研究中心,湖北武汉430063【正文语种】中文【中图分类】U644.1【相关文献】1.内河航标维护船监控系统设计研究 [J], 郭星2.基于北斗卫星通信的航标灯智能遥测遥控系统设计 [J], 宋广军;顾和伟;刘凯文;陈瑞星;张文帅3.基于北斗的航标遥测遥控系统设计 [J], 王永涛4.航标遥测遥控模拟训练系统设计 [J], 黄书科;董大琼5.基于北斗卫星通信的智能航标灯终端物联网遥测遥控系统设计 [J], 王志威;郑恭明因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于ZigBee和AIS的内河航标遥测遥控系统[实用新型专利]
![一种基于ZigBee和AIS的内河航标遥测遥控系统[实用新型专利]](https://img.taocdn.com/s3/m/b23892c3cfc789eb162dc824.png)
专利名称:一种基于ZigBee和AIS的内河航标遥测遥控系统专利类型:实用新型专利
发明人:严新平,黄子超,吴青,初秀民,吴勇
申请号:CN201120276029.4
申请日:20110801
公开号:CN202310007U
公开日:
20120704
专利内容由知识产权出版社提供
摘要:本实用新型提供一种基于ZigBee和AIS的内河航标遥测遥控系统,包括通过AIS连接的海事监管中心、AIS基站,其特征在于:它还包括航标终端和岸基中心节点,航标终端之间以及航标终端与岸基中心节点之间通过ZigBee网络连接,岸基中心节点通过AIS与AIS基站连接。
过ZigBee技术将分散的各航标终端组成通信网络,并将采集信息传输给岸基中心节点;岸基中心节点通过AIS将信息以广播形式发送并传给AIS基站,过往船只也可通过AIS收到航标的信息;AIS基站再通过互联网将获得的信息后传输给海事监管中心。
申请人:武汉理工大学
地址:430070 湖北省武汉市洪山区珞狮路122号
国籍:CN
代理机构:湖北武汉永嘉专利代理有限公司
更多信息请下载全文后查看。
内河航道航标遥测监管系统的开发与设计
要 交 通 桁 纽 。 湖 州 西 部 属 丘 岭 半 山 区 , 非 金 属 矿 产 资 源 非 常 丰 富 , 东 部 为 平 原 ,航 道 纵 横 交 错 ,港 口 密 布 ,具 有十 分 优 越 的 水 运 条件 , 航 道 网 络 十 分 发 达 。 湖 州 航 区 现 有 定 级 航 道 1 6条 , 总 里 1
2. 测控 对象 4
该 系 统 的 测 控 对 象 为 航 标 灯 及 其 相 关 辅 助 设 施 ,主 要 为 以 下设 备 。 ( ) 主 灯 : 绿 光 , l 5 , ACl 0 供 1 W 7 lV
湖 州 位 于 浙 江 省 北 { , 杭 嘉 湖 平 原 西 ; I ; 侧 ,北 濒 太 湖 , 西 接 安 徽 省 ,东 临 江 苏 ,南
2 6 测控 平 台软 件 设计 要 求 .
程 l6 1 3公 里 , 设 有 各 类 标 志 标 牌 5l 0座 ,
电 , 无 换 泡 机 和 闪 光 器 , 一 台 AC2 0 交 2V 流 日光 开 关 。 ( 2) 副 灯 : 自 光 , 8秒 4闪 ,
DC1 V2 w ,2节 6 2 O V/5 At 蓄 电 池供 电 。 0 I ( 3) 充 电 :A C2 0 交 流 转 直 流 给 蓄 电 池 2V
・
数 字技 术 ・
内河航道航标遥测监管系统的开发与设计①
冯 玉 如
吴 显 德
( . 浙 江 信 息 工 程 学 校 浙 江 湖 州 3 0 0; 2 湖 州 市 港 航 管 理 局 浙 江 湖 州 3 0 0 L l 0 . 3 1 0) 3
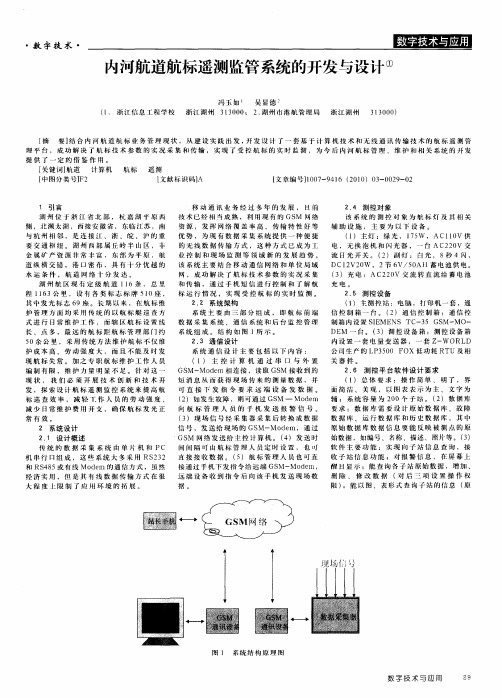
[ 摘 要 】 合 内 河航 道 航 标 业 务 管 理 现 状 ,从 建 设 实 践 出 发 , 发 设 计 了一 套基 于计 算 机 技 术 和 无 线 通 讯 传 输技 术 的航 标 遥 测 管 结 开 ’ 理 平 台 , 成 功 解 决 了 航 标 技 术 参 数 的 实 况 采 集 和 传 输 , 实 现 了 受 控 航 标 的 实 时 监 测 , 为 今 后 内 河 航 标 管 理 维 护 和 相 关 系 统 的 开 发
航标遥测遥控系统的设计与实现
航标遥测遥控系统的设计与实现陈宏;彭国均【摘要】介绍航标遥测遥控系统的总体架构及功能组成,系统由灯器数据采集终端、GSM公网通信、监控中心、监控客户端等组成,该系统可使航标信息按指定格式集中汇总在该航标中心的数据库中,并自动生成航标管理部门及主管部门所需的各类报表及资料,通过计算机网络传送至指定地点或进行打印输出,使航运主管部门及时掌握航运信息,避免事故发生.【期刊名称】《船海工程》【年(卷),期】2007(036)002【总页数】3页(P126-128)【关键词】航标;遥测遥控;电子海图【作者】陈宏;彭国均【作者单位】福建交通职业技术学院,福州,350007;集美大学航海学院,厦门,361021【正文语种】中文【中图分类】TP391.9航标系统是海上交通安全保障体系的重要组成部分。
对航标的有效监控和管理,确保航标信息的准确性,为满足船舶安全航行需求提供更好的服务是非常重要的。
对福建沿海港口进行的海上交通研究表明,由于船舶未能及时、准确获取航标信息而造成的海上交通事故常有发生。
航标遥测遥控系统正是为了满足海事管理部门对航标监控管理的需要而建立起来的一个现代化的远程实时监控系统。
本文研究的航标遥测遥控系统是集全球卫星定位系统(GPS)、全球数字蜂窝移动通信技术(GSM)、电子海图信息与显示系统(ECDIS)和计算机网络技术为一体的综合性高科技应用系统,它实现了航标实时监控管理和航标信息的发布,使船舶及涉海部门及时、准确、方便获取航标信息,为进出海域的船舶保驾护航。
系统总体架构见图1。
1.1 工作原理系统的工作原理就是通过安装在航标上的数据采集器(监控终端)采集航标工作参数,并利用GPS获得航标的经纬度数据,再通过公网GSM通信模块,按照设定传输方式将航标工作参数、航标位置等数据实时传输到航标管理部门的监控中心(中心站),监控中心由高性能计算机、收发设备、GPS后差分处理器以及满足IHO-S57标准的电子海图平台组成,监控中心负责航标数据的处理、存储及分发至具体管理者,管理者通过客户端软件对航标实现远程的遥测遥控工作。
内河航标遥测监控系统
内河航标遥测监控系统
顾永林
【期刊名称】《中国水运(上半月)》
【年(卷),期】2004(000)005
【摘要】自古便有“江南水乡”美称的湖州,是全国内河水上交通最发达的地区之一。
湖州航区现有定级航道116条,总里程1163km,共配布了510座各类标志标牌,其中发光标志69座。
长期以来均采用传统的航标艇巡查方式进行日常维护工作,而辖区航标配布线长点多,最远的航标距湖州市区约48km,采用传统方法维护航
【总页数】2页(P42-43)
【作者】顾永林
【作者单位】湖州市港航管理局,浙江,313000
【正文语种】中文
【中图分类】U6
【相关文献】
1.内河航标遥测遥控系统设计 [J], 孙星;吴勇;初秀民;严新平
2.内河航标遥控遥测技术应用研究 [J], 朱年龙;周庆;姚海亮
3.内河航标遥控遥测管理初探 [J], 严桂强;吴绪权
4.内河航道航标遥测监管系统的开发与设计 [J], 冯玉如;吴显德
5.内河航道航标遥测监管系统的开发与设计 [J], 冯玉如;吴显德
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
信 息 或监测 对 象 的信 息 , 能够对 信息 进行 处理 , 并 传
送 给 需 要 的 用 户 。 Zg e j iB e系 统 的 显 著 特 点 是 功
象, 而且 由于航 标特 殊 的条 件状 况 , 如潮 湿 、 晃动等 ,
收 稿 日 期 : 01 3 1 2 1O 8
Su n , W u Yo g Ch umi , Yan Xi pi g n Xi g n ~, u Xi n n n ・
( . I e l n r ns r s e sR e e r h Ce t r W uh n U n v r iy o 1 nt li ge tT a po Sy t m s a c n e , E a i e st f T e hn o c ol gy, u n 4 00 3,Chi a; 2 Eng n e i g R e e r h W ha 3 6 n . i e rn s a c
方 法 等 多方 面充 分 考 虑 了 航 标 遥 测 遥 控 系统 的 能 耗 、 输 距 离 、 靠 性 等 要 求 , 用 Z g e 路 由算 法 , 进 行 了 多 传 可 利 i e B 并
项 测 试 试 验 。试 验结 果 表 明 , 系 统 能 够 解 决 以往 类 似 系统 中存 在 的 通信 不 可 靠 、 耗 过 高 等 问题 。 该 能
网状拓扑 结构 。
遥控 遥测 系统 , 弥补 Zg e 以 iB e传 输 距 离短 的不 足 。 针对 内河航 标遥 测遥控 系统进 行 了电路设 计 。
1 内河航 标 遥 测 系统构 建
1 1 内 河 航 标 特 点 .
由于 自然 条 件 的原 因 , 内河 航 标有 许 多不 同于
海上航 标 的特点 :
1 )内河 有洪 水期与 枯水 期之 分 。在洪 水 期 , 河
面增 宽 , 深 、 速增 大 。 因此 , 须 注 意标 示 出淹 水 流 必 没 的河岸 、 屿 和 其 它 碍 航 物 , 及 时 开 辟 经 济 航 岛 并
岸标 岸标
滋
趸船
’ 网
道 。在枯水 期 , 标 配布应准 确标示 航道 方 向 , 航 注意
标 示浅滩航 道 的轮 廓 和揭 示 浅滩 航 道 的最浅 水 深 , 航标 的位置 不是 固定不 变 的。 2 )由于河水 的单 向流动 , 发生 由于洪 水 冲刷 易 和其他 因素 而导致 的移 位或 流标的现 象 。 3 )内河 航道 由于受 到地形 、 势 和河 流特 征 的 地 影 响较 多 , 能出现水 位 陡涨陡落 现象 。 可 这些 都要求 对 内河 航标 进行实 时 的定 位 和遥测 遥控 , 以确保 航行 安全[ 。 5 ]
摘 要 : 对 内河 航 标 的特 点 , 计 了一 种 : 针 设 基于无 线传 感 网 络 的 内河 航 标 遥 测 遥 控 系 统 , 现 了航 标 状 态 的远 程 监 实
测 , 能 够 进 行 灯 质 控 制 。介 绍 了 系 统 中 主 控 单 元 、 测 遥 控 等 模 块 作 用 和 电 路 设 计 , 模 块 选 型 、 并 遥 在 电路 设 计 、 用 应
取 和 处 理 技 术 , 够 实 时 监 测 、 知 和 采 集 各 种 环 境 能 感
基 本保 障 。对 航 标 灯 的灯 质 等 信息 进 行 遥 测 遥 控 , 具有 投入 小 、 围广 、 靠性 高 等优 点_ 。发 展智 能 范 可 】 ] 航标 的遥 测遥 控 技术 , 实现 内河航 道 管: 是 哩现代 化 、
内 河 航 标 遥 测 遥 控 系 统 设 计
孙 星 , 吴 勇 , 初 秀 民 , 严 新 平 。
( . 汉理 工大 学 智 能交通 系 统研 究 中心 , 1武 湖北 武 汉 4 0 6 ; 3 0 3 2 水路公 路 交通 安全 控制 与装 备 教育 部工 程研 究 中心 , . 湖北 武汉 4 0 6 ) 3 0 3
a d m a e t r a re t T e tr ulsi c et tt ss t m o d b o u in f o e s o o r la i— n ny t s s a e c r id ou . s es t ndiat ha hi ys e c ul ea s l to orpr blm flw e ib l iy o o m u c ton an xc s ie p w e ons m pto f o t fcm nia i d e e sv o rc u in r m whih ex si g s s e s s fe . c itn y t m u f r
f n t n n ic i d sg o i o to n t e o e mo i rn n o t o n ta d o h r u i r r s n e . u c i s a d c r u t e i n f rma n c n r l i,r m t n t i g a d c n r lu i n t e n t a e p e e t d o u o s
里 , ] 因此 将 Zg e 技 术 同 AI iB e S相 结 合 , 成 航 标 组
Zg e 模块 传至 趸船 。在趸 船上 , 过 AI iB e 通 S模块 或 者 Zg e 终端将 数据 传输 到计算 机 , 而利 用海 事 iB e 从
专网 ( 互联 网) 至 监控 指 挥 中心 , 或 传 整个 系统 构成
耗低 , 特别适 用 于航标 遥 测遥 控 , 是 系统通 信传输 但
基金项 目: 西部 交通 建 设 科 技 项 目( 0 9 2 8 1 6 ) 武 汉 理 工 大 学 创 新 基 金 项 目 2038104 ; 作者简介 : 孙 星 ( 9 7 ) 男 , 东 潍 坊 人 , 士 生 , 事 轮 机 工 程 研 究 。E ma :u xn : wh t e u c . 18 一 , 山 硕 从 — i sn ig l @ u.d . n
The s e ilr q r m e si w e ons m pton,t a m iso dit nc nd r la lt t et ke n o a c un h n p ca e uie nt n po rc u i r ns s in s a ea e ibiiy e ear a n i t c o tw e
s l c ig mo u e ,d sg i g ee to cr u t n h o i g wo k n d s e e tn d ls e i n n lc r — ic isa d c o sn r i g mo e .Th i B e Ro tn l o i m t ie e Z g e u ig ag rt h i u izd s l
关 键 词 : 路 运 输 ; 字 航 道 ; 测 遥 控 系 统 ; 耗 ; 标 ;试 验 水 数 遥 功 航 中 图分 类 号 : 4 . U6 4 1 文献标志码 : A
De i n o l ’ e e i g a d R e o e Co r lS s e s g f Te e M t r n n m t nt o y t m o n a a e wa a ia in M a k f I l nd W t r y N v g to r s
Ke r s wa e wa r n p r a i n i ia f i y; ee me e ig a d r mo e c n r ls s e ;p we o s mp i n y wo d : t r y t a s o t t ;d g t ar o 1 wa t l— t rn n e t o t o y t m o rc n u t ; o
Ce t rf r Tr n p t to f t M i s r f Educ ton),W u n 4 0 3,Ch na n e o a s ora i n Sa e y( nit y o ai ha 3 06 i )
Aba t rs is o nlnd w a e w a vga i a ks e em e e i nd r i g s e ily a a e o t e c r c e itc fi a t r y na i ton m r ,a t l— trng a e—
m ot o t i pe a i n c diin s w el s t e ot c t o o he i c a a t rsi s i c e e e m niorng of o r to on to a l a he r m e on r l f t l ght h r c e i tc s a hiv d. The
n v g t o a k; t s a iain m r et
航 标 作 为 重 要 的 导 航 工 具 , 船 舶 安 全 航 行 的 是
许 多模块 会 出现 不稳定 的情况 。 电 子技术 的发 展为 航标 遥控 遥测 提供 了新 的途 径 。集成 了传 感器 、 嵌入 式计 算 、 网络 和无 线通信 四 大技 术而 形成 的 Zg e 技 术 是 一 种 全 新 的信 息 获 iB e
第 3 4卷 第 2 期 2 1 年 6月 01
中 国 航
海
Vo. 4 NO 2 13 .
NAVI GA T 1 N 0 0F CH I A N
J n 01 u .2 1
文 章 编 号 :0 0 6 3 2 1 ) 2 0 5 5 1 0 —4 5 ( 0 1 0 —0 0 —0