AEG-Thyro-2A调功器安装说明中文说明书
thyro-a(热油加热器功率控制器)
Betriebsanleitung/Operating Instructions Array Thyristor-LeistungsstellerThyro-AThyristor Power ControllerThyro-AENContents1. General71.1 Type designations/Validity71.2 Abbreviations 101.3 Special Features 101.4 Warranty112. Safety122.1 Identification in the operating instructions122.2 General danger information 132.3 Operator requirements 132.4 Personnel requirements 142.5 Intended use 142.6 Use of the device 152.6.1 Operation152.6.2 Prior to installation/commissioning 152.6.3 Maintenance, service, faults 162.6.4 Transport 173. Functions183.1 Operating modes183.1.1 Full wave switch principle TAKT 183.1.2 Phase angle principle VAR193.1.3 Half wave switch principle QTM 193.2 Setpoint processing 193.3 Control modes 203.4 Limits233.5 Pulse inhibition 233.6 C urrent and voltage transformer (only for ...H RL1 and ...H RLP1) 233.7 D isplay via analog output(only for ...H RL1 and ...H RLP1) 243.8 Error and status messages 243.8.1 LED messages 293.8.2 F ault signalling relay K1(only for ...H RL1 and ...H RLP1) 313.9 Monitoring323.9.1Monitoring the mains voltage323.9.2 Load monitoring (only for ...H RL1 and ...H RLP1) 333.9.3 Device temperature monitoring 333.9.4 Fan monitoring (for ...F...) 333.10 E xtended functions(with bus module / THYRO-TOOL FAMILY) 333.10.1 Extended operating modes / circuit types 343.10.2 Averaging for the analog output 353.10.3 Control limits353.10.4 Controller parameters 353.10.5 Mains load optimization354. Settings and operation 364.1 Device overview 374.2 DIP switches S1394.2.1 Operating mode and load types 414.2.2 Control mode / Analog output414.2.3 Live zero and setpoint input range434.2.4 Analog output (only for ...H RL1 and ...H RLP1) 434.3 Potentiometer444.3.1 Setting the transformer load (AN1, SST, T 0) 454.3.2 Setting ohmic load 464.3.3 S etting maximum load value with control end U, U 2 and P control 474.3.4 S etting maximum load current (only for ...H RL1 and ...H RLP1) 484.3.5 S etting example for maximum load value at control end / maximum load current 494.3.6 A dapting analog output (scale) (only for ...H RL1 and ...H RLP1) 504.3.7 S etting load monitoring (undercurrent monitoring) (only for ...H RL1 and ...H RLP1) 515. Installation585.1 Connecting terminals (Overview) 605.2 Connecting power supply 625.3 C onnecting additional electronics supply (only for ...H RL1 and ...H RLP1) 625.4Connecting pulse inhibition63EN5.5 Connecting analog setpoint input635.6 Connecting control input for switch operation 635.7 Connecting the bus module 645.8 U sing the analog output(only for ...H RL1 and ...H RLP1) 655.9 Using the THYRO-TOOL FAMILY656. Mains load optimization 686.1 Internal mains load optimization 686.2 Synchronization with Thyro-Power Manager 686.3 Software synchronization (operating mode TAKT) 697. Connecting diagrams 718. Help in the event of problems 799. Technical data 8210. Dimension drawings 8911. Accessories and options 10412.Approvals and conformity105List of figures and tablesFig. 1 Setpoint inputs and effective setpoint 19Fig. 2 Operating elements61Fig. 3 User surface THYRO-TOOL FAMILY 67Fig. 4 Connection diagram Thyro-A 1A...H1 71Fig. 5 Connection diagram Thyro-A 2A...H172Fig. 6 Connection diagram Thyro-A 1A ...H RL1, ... H RLP1 73Fig. 7 C onnection diagram Thyro-A 2A ...H RL1, ... H RLP1 74Fig. 8 Connection diagram Thyro-A 3A...H175Fig. 9Connection diagram Thyro-A 3A ...H RL1, ... H RLP1 76Fig. 10 Load connection types77Fig. 11 A dditional electronics supply and connection withoptional bus module 77Fig. 12 C onnection diagram mains load optimizationwith Thyro-Power Manager 78Fig. 13 C onnection diagram mains load optimizationfor operating mode TAKT 78Tab. 1 Effects of a change in the load resistance 22Tab. 2 Effective limits23Tab. 3 Limit values for mains voltage monitoring32Tab. 4 Maximum load value at control end 48Tab. 5 Maximum load current 49Tab. 6 Analog output (scale)50Tab. 7a Load monitoring A 1A/2A, star delta, without neutral 52Tab. 7b L oad monitoring Load with common star point andwithout neutral conductor 53Tab. 7c Load monitoring , A 2A, star point54Tab. 8 L oad with common star point and without neutralconductor 55Tab. 9 Load in delta connection56Tab. 10 Other possibilities of load monitoring 57Tab. 11 Connecting terminals (Overview)60ENContactTechnical queriesDo you have any technical queries regarding the subjects dealt with in these operating instructions?If so, please get in touch with our team for power controllers:Tel. +49(0)2902 763-520 or 763-290 Fax +49(0)2902 763-1201Commercial queriesDo you have any commercial queries on power controllers?If so, please get in touch with our team for power controllers.Tel. +49 (0)2902 763-558 or (02902) 763-591Service-HotlineOur team is at your service on the following hotline:AEG Power Solutions GmbH Emil-Siepmann-Strase 32D-59581 WarsteinTel. +49 (0)2902 763-558 or +49 (0)2902 763-100http://www.aegps.deCopyrightNo part of these operating instructions may be transmitted, reprodu-ced and/or copied by any electronic or mechanical means without the express prior written permission of AEG PS.© Copyright AEG Power Solutions GmbH 2010.All rights reservedFurther information on copyrightThyro-A is an international registered trademark of AEG Power Solutions GmbH.Windows and Windows NT are registered trademarks of the Microsoft Corporation.All other company and product names are (registered) trademarks of the respective owners.1. GeneralThe Thyro-A is a communication-capable thyristor power controller. It can be used wherever alternating voltages, alternating currents or outputs in thermal process technology need to be controlled. The Thyro-A has several different control and regulation modes, can easily be connected to process and automation technology, has a high degree of control accuracy and is simple to handle.These operating instructions describe the configuration and functions of the Thyro-A and are designed to enable qualified personnel to per-form the following work:• planning• commissioning• maintenance and repair1.1 Type designations / ValidityThese operating instructions describe the Thyro-A series versions ...H 1, H RL1 and ...H RLP1. Product characteristics that are only provided by the Thyro-A ...H RL1 and ...H RLP1 series are marked in the text.These operating instructions comply with the current technical speci-fications of the device at the time of publication. The contents do not constitute a subject matter of the contract, but serve for information purposes only.We reserve the right to alter any specifications given in these opera-ting instructions, especially with regard to technical data, operation, weights and dimensions. AEG PS reserves the right to make modifi-cations with regard to the content and technical data in these opera-ting instructions.ENType codeThe type designation of the thyristor-power controller is derived from the configuration of the power unit as well as from other features.Thyro-A 1A T hyristor controller with single phase power unit, suited for single phase loadsThyro-A 2AT hyristor controller with two phase power unit, sui-ted for symmetrical loads in three phase operation in three phase saver circuitThyro-A 3AT hyristor controller with three phase power unit, suited for three phase loadsDesignation Characteristics Different version (example)of thepower controllerThyro-A 3A Three phase power controller with threephase power unit ...400- with 400V type voltage 230V, 400V,500V, 600V ...280 with 280A type current16 ... 1500A H with integrated semiconductor fuse F with fan (from 280A types) * R with signalling relay * L with load monitoring * P with additional power control (H RLP)* 1Identification Thyro-A, series*Example:Thyro-A 3A...H1* device-specificThyro-A ...H1Thyristor power controller with integrated semiconductor fuse, sys-tem bus interface, TAKT and VAR operating modes, synchronization option (in TAKT operating mode with Thyro-Power Manager option) and control modes U, U 2. Suitable for 3-phase operation in 3-phase circuit. Suitable for visualization and commissioning software from the Thyro-Tool Family.Thyro-A …HRL1Thyristor power controller with integrated semi conductor fuse, sys-tem bus interface, additional 24 DC/AC electronic power supply, signalling relay, load monitoring and analog output, channel separa-tion, with operating modes TAKT and VAR, synchronization option (in operating mode TAKT with Thyro-Power Manager), control modes U, U 2, I ,I 2. Suitable for the visualization and commissioning software Thyro-Tool Family.Thyro-A ...H RLP1Thyristor power controller with integrated semiconductor fuse, system bus interface, additional 24 VDC/AC electronic power supply, signal-ling relay, load monitoring and analog output, channel separation, with TAKT and VAR operating modes, synchronization option (in ope-rating mode TAKT with Thyro-Power Manager) and control modes U, U 2, I ,I 2 and P. Suitable for visualization and commissioning software Thyro-Tool Family.EN1.2 AbbreviationsAEG PS AEG Power Solutions GmbH AN1 Phase angle of the 1st half-wave SST Soft start time SYT Synchro cycle T 0 Cycle period T S Switch-on timeTakt Full wave switch principle - Thyrotakt Var Phase-angle principle - ThyrovarQTMHalf wave switch principle - Quick takt mode1.3 Special Features• Integrated semiconductor fuse • T ype range 230-600V, 16-1500A, single phase, two phase and three phase • A dditional electronic supply, therefore also operation with mains vol-tages up to 0.43 x U nom possible (only ...HRL 1 and ...H RLP1)• O hmic load and transformer load, as well as load with high R warm /R cold (≤ 6) peak current limitation of 3 x I nom (only ...H RL1 and ...H RLP1) in operating mode VAR • Soft start function for transformer load• Channel separation, necessary with countervoltage • Load current monitoring (only ...H RL1 and ...H RLP1)• Signalling relay (only ...H RL1 and ...H RLP1)• Analog output (only ...H RL1 and ...H RLP1)• C ontrol modes U, U 2; with ...H RL1 additional I, I 2, with ...H RLP1 additional P• Operating modes TAKT, VAR and QTM (with Thyro-A 1A)• S ynchronization option (for TAKT: with Thyro-Power Manager, for QTM: with internal mains load optimization)• Triggering with analog setpoint via PC or optional bus adapter • System interface standard• Safe isolation in acc. with EN 50178 ch. 3• U L approval (for standard devices 16-350A, 495-1500A in prepara-tion)• C onnection for optional visualization and commissioning software Thyro-Tool Family (via PC-Interface RS232)Options:•C onnection to various bus systems, e.g. Profibus DPV1, Modbus RTU) DeviceNet, CANopen, ProfiNet.Other bus systems on request.•P C-Interface and THYRO-TOOL FAMILY (visualization and commissioning software)1.4 WarrantyIn the event of any claims in connection with the Thyro-A, please contact us quoting:• type designation• fabrication number / Serial number • reason for the complaint• environmental conditions of the device • operating mode • period of useGoods and services are subject to the general conditions of supply for products of the electrical industry, and our general sales conditions. Claims in connection with supplied goods must be submitted within one week of receipt, along with the delivery note. AEG PS will rescind all obligations such as warranty agreements, service contracts, etc. entered into by AEG PS or its representatives without prior notice if maintenance and repair work is carried out using anything other than original AEG PS spare parts or spare parts purchased from AEG PS.EN2. Safety2.1 Identification in the operating instructionsIn these operating instructions, there are warnings before dangerous ac-tions. These warnings are divided into the following danger categories:DANGERDangers that can lead to serious injuries or fatal injuries.WARNINGDangers that can lead to serious injuries or considerable damage to property.CAUTIONDangers that can lead to injuries and damage to property.CAUTIONDangers that can lead to minor damage to property.The warnings can also be supplemented with a special danger sym-bol (e.g. “Electric current“ or “Hot parts“) , e.g.risk of electric current orrisk of burnsIn addition to the warnings, there is also a general note for useful information.NOTEContent of note2.2 General danger informationDANGERElectric currentRisk of injury from current carrying parts. There is a danger:- i n the case of devices not controlled, since the load circuit cannot be disconnected from the power supply network by the power controller.- a fter disconnection from the power supply network, since the capacitors can still carry a dangerous residual voltage. Wait approx. 1 minute until the residual voltage has dissipated DANGERElectric currentRisk of injury from current carrying parts. • Never operate the device without the cover DANGERHot deviceRisk of burns from heat sinks and neighbouring plastic parts(> 70°C possible)Do not touch the hot parts of the device.Affix the “Risk of burns“ warning symbol in the immediate vicinity of the device.2.3 Operator requirementsThe operator must ensure the following:• T he safety regulations of the operating instructions are observed.• T he accident prevention regulations valid in the respective country of use and the general safety regulations are observed.• A ll safety devices (covers, warning signs etc.) are present, in perfect condition and are used correctly.• T he national and regional safety regulations are observed.• T he personnel has access to the operating instructions and safetyregulations at all times.EN• T he operating conditions and restrictions resulting from the technical data are observed.• S hould abnormal voltages, noises, increased temperatures, vibra-tion or similar occur, the device is immediately put out of operation and the maintenance personnel is informed.2.4 Personnel requirements• O nly qualified electro-technical personnel who are familiar with the pertinent safety and installation regulations may perform the follow-ing:- transport - installation - connection - commissioning - maintenance - testing - operation.• T hese operating instructions must be read carefully by all persons working with or on the equipment prior to installation and initial start-up.2.5 Intended useThe device may only be used for the purpose for which it was inten-ded, as persons may otherwise be exposed to dangers (e. g. electric shock, burns) and plants also (e. g. overload). The user must therefo-re observe the following points:• I t is not permitted to make any unauthorised modifications to the unit or to use any spare parts or replacement parts not approved by AEG PS, or to use the unit for any other purpose.• T he warranty obligations of the manufacturer are only applicable if these operating instructions are observed and complied with.• T he device may only be used for control and regulation of electrical power.• The device is a component that cannot function alone.• Project planning must account for the proper use of the device.• N ever exceed the maximum permitted connection values as given on the type plate.• T he device may only be operated in conjunction with a connected ahead mains disconnect device (e. g. switch, VDE 0105 T1).• I t must be guaranteed that in the event of a fault, no uncontrolled currents, voltages or power may occur in the circuit.• D espite proper use, it is possible in the event of a fault, that the device will not control the currents, voltages and power in the load circuit (example: if the power components are destroyed (broken down or high-resistance), the following reactions are possible: cur-rent interrupted, half wave operation, permanent flow of power).2.6 Use of the device2.6.1 Operation• O nly switch on the mains voltage at the device when there is no danger to persons, system or load.• Protect the device against dust and damp.• Ensure that the ventilation openings are not blocked 2.6.2 Prior to installation / commissioning• I f stored in a cold environment: ensure that the device is absolutely dry. (Allow the device a period of at least two hours to acclimatise before commissioning)• C heck that the voltage data on the type plate matches the mains voltage.• Only install the device in an upright position.• Ensure sufficient ventilation of the cabinet if mounted in a cabinet.• O bserve minimum spacing (clearance: 150 mm above, 100 mm be-low). The devices can be installed next to each other without spa-cing between.• E nsure that the device cannot be heated up by heat sources below it. (The power loss is given in the type overview table, see page 87, Technical data).• G round the device in accordance with local regulations.• C onnect the device to the mains and the corresponding load in ac-cordance with the connection diagrams.• T he device is parameterised when delivered. The parameters are adapted to the particular power unit. (Default: operating mode VAR without N-conductor). Check default settings and adjust to appli-ENcation conditions if necessary (e.g. operating mode, control mode, limitations, monitoring, control characteristic curves, actual value output, fault messages etc.)NOTEConnecting the control signalsThe following control signals are absolutely necessary for operating the devices:- Setpoint (terminal X2.4 or via bus option)- Pulse blocking (to ground, on terminal X2.1, X2.2; bridge present) > U se shielded control conductors to connect the control signals.If the pulse blocking bridge is not connected, the device is blocked and is not operating. Communication is still possible via the interface (see page 63, Connecting pulse blocking).2.6.3 Maintenance, service, faultsIn order to avoid personal and material damages, the user must ob-serve the following:• Before all work:> Disconnect the device from all external voltage sources.> Secure the device against accidentally being switched back on.> U se suitable measuring instruments and check that there is no vol-tage present.> Ground and short circuit the device.> P rovide protection by covers or barriers for any neighbouring live parts.• T he device may only be serviced and repaired by trained electro-technical personnel.• T here is a risk of damage when carrying out repair work on the power unit.Various components of the power unit are screwed tight with a pre-cise torque.> R epairs to power units have to be carried out by AEG Power Solutions GmbH!• see also contact on page 62.6.4 Transport• Only transport the device in the original packaging.• P rotect the device against damage, caused by jolts, knocks andcontamination, for instance.EN3.1.2 Phase angle principle VAR (only A 1A)In this operating mode, the sinus wave of the mains voltage is shifted. The shift depends on the setpoint value. Characteristic of this opera-ting mode are the high control dynamics.When phase angle control VAR is used, harmonics of the mains voltage form. These can be compensated for with various types of circuit.3.1.3 Half wave switch principle QTM (Quick Takt Mode only 1A)QTM is the applied for a patent fast operating mode which works on the half wave switch principle. QTM is suitable for ohmic loads. De-pending on the predetermined setpoint value, mains half waves are switched. DC components are avoided for the phase duration.The fast phase control is particularly suited for IR beams as an alternative to phase-angle control. When using several controllers it is possible, by synchronization, to keep the mains feedback small.3.2 Setpoint processingFig. 1: Setpoint inputs and effective setpointThe user can adapt the setpoint signal to process controllers or to the automation system (see page 43, Live zero and setpoint input range).3. FunctionsIn order for the Thyro-A to be adapted as best possible to the required application, it has numerous functions. These functions are described in this chapter.NOTEIdeal adaption of the Thyro-A to the loadChoose the operating or control mode to adapt the Thyro-A to best match the load.NOTETimes givenThe times given (duration), e. g. T 0 or SST are based on a 50 Hz mains frequency. With a mains frequency of 60 Hz, the times go down to 5/6 of the indicated value.3.1 Operating modesThe user selects the operating mode most suitable for optimum ad-aptation to the various applications and manufacturing processes, as well as to different electrical loads.3.1.1 Full wave switch principle TAKTIn this operating mode, the mains voltage is switched periodically, relative to the defined setpoint. Integer multiples of the mains periods are switched to avoid d.c. components. The operating mode full wave switch principle TAKT is particularly suited for loads with thermal iner-tia. The most important settings for this operating mode are the cycle time (T 0) and the transformer load (see page 45, Setting the transfor-mer load).The use of this function achieves the lowest mains feedback. Any mains feedback that will be still present (e.g. flicker) can be reduced to an insignificant amount using system load optimization (see page35, Mains load optimization).refer to chapter 2.62021ENThis is done by altering the starting and finishing points of the control characteristic curve. All common signals can be used.As soon as the power controller reaches a limit value (U max , I max , P max ), this is indicated by LEDs (see page 29, LED messages).The power controller has two setpoint inputs that are electrically isola-ted from the mains and of which only one is ever active.• s etpoint 1: analog signal X2.4 (+); X2.3 (ground)• s etpoint 2: via system interface (bus module, THYRO-TOOL FAMILY...)The effective setpoint is the value when connected through. The set-point input to be used is defined by configuring terminal X22.1 (see page 36, Settings and operation).3.3 Control modesThe power controller has various different control modes.Before commissioning the power controller and selecting a control mode, familiarization with the operating procedure and the effect upon the application is important.Control modes ...H1Control mode Control variableU, U 2highest conductor voltage Control modes ...H RL1Control mode Control variable U, U 2 highest conductor voltage I, I 2 highest phase current Control modes ...H RLP1Control mode Control variable U, U 2 highest conductor voltageI, I 2highest phase current P total effective powerFluctuations in mains voltage and changes in load are compensated directly by bypassing the inert temperature control circuit. This me-thod is therefore particularly fast (secondary control).Control characteristic curve and control variableThe control variable influencing the load is proportional to the effec-tive setpoint in the case of control modes U, I, P. In control modes U 2, I 2, the control variable influencing the load is a square of the effective setpoint.U Output voltage, U eff U 2 Output voltage, U 2effI Output current, I effI 2 Output current, I 2eff (only with …H RL1 und H RLP1)R2012223ENP Output power (only for ...H RLP1)If the load resistance changes, e.g. due to temperature, ageing orload interrupt, the variables influencing the load change.3.4 LimitsIn addition to setting the control mode, it is also possible to set limits for the following variables:• Voltage limitation (U)• Current limitation (I) (only for ...H RL1 aund ...H RLP1)• Power limitation (P) (only for ...H RLP1)Tab. 2Effective limits(*1 for ...H RL1 and H RLP1, *2 only for ...H RLP1)The Thyro-A 1A/3A ... H RL1 and ...H RLP1 also has peak current limiting (Î=3 x I nom ) at the phase angle.3.5 Pulse inhibitionThe pulse inhibition (PULSE INHIBIT; terminals X2.1 - X2.2 1.5 mm 2,grid 3.5) is activated by opening the pulse inhibition bridge, i.e. the power unit is no longer triggered. If the pulse inhibition is activated, the LED “PULSE INHIBIT” lights up red. After switching on or after pulse inhibition the first Takt-pulse (in Takt operation) takes place with the Soft-Start function. This is important for the transformer load if it was previously switched off for an undefined reason (remanence). For Thyro-A 2A or Thyro 3A the pulse inhibition is only wired to the master (L1, left).3.6 Current and voltage transformer(only for ...H RL1 and ...H RLP1)For each power unit the power controller has a current transformer that is wired. The load voltage is obtained from the measuring signalof the mains voltage.Tab. 1 Effects of a change in the load resistance(*1 for ...H RL1 and ...H RLP1, *2only for ...H RLP1)2425EN3.7 Display via analog output(only for ...H RL1 and ...H RLP1)The following variables are output at the analog output (e.g. when an external measuring instrument is connected):Load current (highest phase current from L1, L2, L3)Load voltage (highest conductor voltage)Effective power (total power) (only with ...H RLP1)Additional variables (can be selected via PC/bus, e.g. mains voltage setpoint etc.)The user must configure which variable is to be output at the analog output, (see page 41, Control mode / Analog output). The analog output can also be used as a setting aid for potentiometer settings (see page 44, Potentiometer).3.8 Error and status messagesThe Thyro-A has internal error and status messages. The THYRO-TOOL FAMILY can be used to configure the consequences. The usercan define what the reactions are to be in the event of a particular message. Possible reactions that can be set are blocking the load current (pulse inhibition) and an output at fault signalling relay K1 (only for ...H RL1 and ...H RLP1). The working principle can also be set at fault signalling relay K1. Basic error messages that make ope-ration of the device impossible always result in pulse inhibition being actuated or fault signalling relay K1.Overview Thyro-A…H1Default settings2627ENOverview Thyro-A…HRL1 and Thyro-A…H RLP1Please refer also to chapter LED messages (see page 29) and chapter Fault signalling relay K1 (see page 31).Default settingsDefault settingsDefault settings2829EN3.8.1 LED messages12345678Possible settings in THYRO-TOOL FAMILY3031ENWhen the semiconductor fuse is triggered, this causes a voltage failure at the power controller. The device therefore switches off or announces a frequency error.LED messagesIf the power controller is supplied from an external 24V source at theextra electronics supply input (see page 62, Connecting additional electronics supply), the device sends a frequency error message but does not switch off.3.8.2 Fault signalling relay K1(only for ...H RL1 and ...H RLP1)NOTEDefault settingThe function explained here is described in the default state.This setting can be changed with a bus module or with THYRO-TOOL FAMILY.X3.1 rootX3.2 N/O contact X3.3 N/C contactFault signalling relay K1 has a changeover contact. Messages that cause the fault signalling relay to switch can be set with THYRO-TOOL FAMILY. In the default state, fault signalling relay K1 functions on the closed circuit principle.In the event of the following errors, the fault signalling relay de-ener-gizes and the power controller switches off:• SYNC error • internal error• undervoltage in the mains • master/Slave error• error rotating field / phaseIn the event of the following errors, the fault signalling relay de-energizes, the power controller remains on and a message is sent (LED):• excess temperature• undercurrent in the load circuit。
A-T Controls NS系列弹簧座双塞旋钮阀门安装与维护指南说明书

Contents1SCOPE (2)2INSTALLATION (2)3VALVE OPERATION (3)4DISASSEMBLY (4)5STORAGE (4)6REPAIR KITS (4)8BILL OF MATERIALS (5)9STUD & BOLT SIZING (7)1SCOPE1.1CAUTION1.1.1For your safety, read this manual before installation or servicing.1.1.2Before installing or servicing, please ensure the line pressure has been relieved and any hazardous fluids havebeen drained or purged from the system.1.1.3Ensure that all Lockout and Tagout procedures for the system have been properly implemented.1.2USE1.2.1A-T Controls NS Series Resilient Seated Butterfly Valves are available in lug and wafer style designs and arecompatible with ANSI B16.5 Class 125/150 flanges. Wafer style valves are also compatible with EN1092-2 PN10/16 flanges.1.2.2Maximum results and optimum valve life can be maintained under normal service conditions and in accordancewith pressure/temperature ratings and corrosion data chart.2INSTALLATION2.1A-T Controls NS Series Resilient Seated Butterfly Valves are bi-directional and can be installed with the flow in eitherdirection. The valve can be mounted in any position so that the handle, gear, or actuator has proper clearance, can be easily accessed, and the open/close indicator can be viewed. If the gear is equipped with a chain wheel, the valve shall be mounted in a way so that the chain does not come in contact with the valve or pipeline.2.2Before installation of the valves, the pipe must be flushed clean of dirt, burrs, and welding residues. Failure to do socan cause the seats and sealing surfaces to be damaged.2.3The pipe must be free from tension and in proper alignment.2.4Before installation of the valves, check to ensure that all flange seals are free from defects.IMPORTANT NOTE: Flange gaskets shall not be used with A-T Controls NS Series Resilient Seated ButterflyValves. The valves have a seal around the seat so that a gasket shall not be used.2.5Before installation of the valves, check to ensure that there is proper clearance for the disc to be able to fully openand close without being obstructed. This is especially important when using sch. 80 pipe as the clearances become smaller. See the NS Series catalog for valve dimensions.2.6A-T Controls NS Series Resilient Seated Butterfly Valves shall be installed in the pipeline completely assembled andopen approximately 5 degrees from the closed position. The valves shall NOT be opened so that the disc is outside of the seat. Do NOT disassemble the valves or remove any handles, gears, or actuators to install.2.7Install the valve in the pipeline and tighten the flange bolts properly per the recommended minimum flange bolttorques in the table below. The bolts shall be torqued in a uniform pattern as to evenly compress the seat forsealing (no flange gaskets shall be used).2.8DEAD-END SERVICEA-T Controls NS Series Resilient Seated Butterfly Valves are rated for bi-directional dead-end service applications.The vulcanized molded seat design of these valves is what gives the valve its bi-directional dead-end servicecapability. The dead-end service rating for these valves follows the standard operating pressures and temperatures given in the catalog. The Dead-End Service White Paper on A-T Controls website can also be referenced for more information.3VALVE OPERATION3.1MANUALCAUTION: A-T Controls recommends a manual gear operator for all valves larger than 6”.3.1.1HANDLES3.1.1.110 Position HandlesTo OPEN the valve; squeeze the handle to unlock it and turn it in the counter-clockwise direction. The handle can be locked in at 10 degree increments to adjust the flow. The valve will be locked into the 90 degree marker and parallel to the pipeline when fully open.To CLOSE the valve; squeeze the handle to unlock it and turn it in the clockwise direction. The handle can belocked in at 10 degree increments to adjust the flow. The valve will be locked into the 0 degree marker andperpendicular to the pipeline when fully closed.Note: The handles contain a pin that can be used to deter unwanted operation. The pin can be removed ifunnecessary per the end user’s requirement. A padlock (not included) can also be used through this hole in the handle to lock out operation of the handle.3.1.1.2Infinite HandlesTo OPEN the valve; loosen the lock bolt & nut to unlock it and turn the handle in the counter-clockwise direction.The handle can be set in infinite positions between fully open and fully closed to adjust the flow. Once in thedesired position, tighten the lock bolt & nut to hold the handle in place. The valve will be fully counter-clockwise and parallel to the pipeline when fully open.To CLOSE the valve; loosen the lock bolt & nut to unlock it and turn the handle in the clockwise direction. Thehandle can be set in infinite positions between fully open and fully closed to adjust the flow. Once in the desired position, tighten the lock bolt & nut to hold the handle in place. The valve will be fully clockwise and perpendicular to the pipeline when fully closed.3.1.2GEARTo OPEN the valve; turn the hand wheel counter-clockwise. The indicator will be pointing to the open position and stop rotating when fully opened. The flow can be adjusted by stopping the indicator anywhere between open and close.To CLOSE the valve; turn the hand wheel clockwise. The indicator will be pointing to the close position and thehand wheel will stop rotating when fully closed. The flow can be adjusted by stopping the indicator anywherebetween open and close.Note: The gears contain a locking device that allows handwheel operation to be locked out through the use of a padlock (not included). The locking device can be removed if unnecessary per the end user’s requirement.3.2AUTOMATEDA-T Controls NS Series Resilient Seated Butterfly Valves can be mounted with quarter turn actuators. Valves with actuators shall be checked for proper valve stem alignment. Angular or linear misalignments may result in high operational torque and unnecessary wear on the valve stem. See the actuator IOM for information on operating the actuator.Note: When closing the valve, the disc will begin to seal on the seat before it is perfectly perpendicular to thepipeline/flow. In certain circumstances this may be desired to reduce the torque required to “close” the valve or when moving from the closed to open position. Gear or actuator stops can be adjusted to achieve the new “closed”position. This would only be recommended for lower pressure applications as A-T Controls only rates the valves to the full pressure differential in the fully closed position.4DISASSEMBLYA-T Controls NS Series Resilient Seated Butterfly Valves are not designed to be repaired and shall be replaced witha new valve in the case of valve failure. This is due to the vulcanized molded seat design which is not able to beseparated from the body and replaced.5STORAGEA-T Controls NS Series Resilient Seated Butterfly Valves should be clean and bagged sufficiently to preventcontamination and stored in a cool, dark place.6REPAIR KITSRepair kits are not available for A-T Controls NS Series Resilient Seated Butterfly Valves as they are not repairable due to the seat being molded to the body.8BILL OF MATERIALS**one bushing(7) not shown is located below lower stem flange bushing(6).# Under normal operation, the O-Ring and Bushings are not subjected to internal media & pressure.# Under normal operation, the O-Ring and Bushings are not subjected to internal media & pressure.9STUD & BOLT SIZING• Lug Stud and Bolt quantities are per side.• A-T Controls recommends using studs to ensure full engagement in tapped holes.• This table is provided by A-T Controls for reference only, it is the end user's responsibility toselect the correct material, grade, and size of fasteners for their application.A-T Controls product, when properly selected, is designed to perform its intended function safely during its useful life. However, the purchaser or user of A-T Controls products should be aware that A-T Controls products might be used in numerous applications under a wide variety of industrial service conditions. Although A-T Controls can provide general guidelines, it cannot provide specific data and warnings for all possible applications. The purchaser / user must therefore assume the ultimate responsibility for the proper sizing and selection, installation, operation, and maintenance of A-T Controls products. The user should read and understand the installation operation maintenance (IOM) instructions included with the product and train its employees and contractors in the safe use of A-T Controls products in connection with the specific application.While the information and specifications contained in this literature are believed to be accurate, they are supplied for informative purposes only. Because A-T Controls is continually improving and upgrading its product design, the specifications, dimensions and information contained in this literature are subject to change without notice. Should any question arise concerning these specifications, the purchaser/user should contact A-T Controls.For product specifications go to https:///Downloads/A-T Controls, Inc. • 9955 International Boulevard, Cincinnati, OH 45246 • Phone: (513) 530-5175 • Fax: (513) 247-5462 • 。
AEG选型手册

20000
10000
5000
分断时间30ms
合闸时间60ms
合分闸时间110ms
3P/4P
100%
A D H1 H2 A D H1 H2 A D H1 H2 A D H1 H2 A D H1 H2 A D H1 H2
1 1 2 2 1 1 2 2 2 1/2 2 2 2 1/2 2 2 2 2 2 2 2 2 2 2
1000
A
160-400
320-800
400-1000
V
690
V
1000
V
8000
次
20000
次
10000
次
5000
分断时间30ms
合闸时间60ms
ms
合分闸时间110ms
3P/4P
100%
A D A D H1 H2 A D H1 H2
1111221122
220V
50 70 50 70 80 80 50 70 80 80
合分闸时间
极数 第4极额定值 AEG型号 框架、规格
额定极限短路分断能力
In Ue Ui Uimp
Icu
额定运行短路分断能力
Ics
额定短时耐受电流
Icw
额定短时接通能力
Icm
消耗功率
外型 尺寸
重量(kg) 建议最小铜母线尺寸(mm)根据IEC947-1
A
400
800
GB 14048.2/IEC60947-1.2.3/VDE0660中101和107款/BS EN60947-2
1600 -
满足
满足
满足
2000 -
满足
满足
在ACB上级与下级之间短延时整定的最小时差为80ms,上级长延时整定电流大于或等于下级长延时整定值的1.56倍。
Thyro-A.操作手册
半导体可控硅功率调功器是一个组件设备,它只能用于对电能进行控制和调节。 .
半导体可控硅调功器只能运行在型号标牌上允许连接的最大负载之内。
半导体可控硅调功器主电路中需要串联上一个合适的断路装置(例如,开关, VDE 0150 T1).
作为一个组件装置,半导体可控硅调功器是无法单独进行工作的,而且在规定使用范 围内使用该装置的时候,必须提供相关的保护,从而将残留风险降低到最小。
73
> 目录
安全手册
70
安全规则
76
关于当前操作说明和 T h y r o -A 标注
78
> 1 . 介绍
79
1.1 综述
80
1.2 特性
80
1.3 类型名称
81
1.4 缩写
81
> 2 . 功能
82
2.1 操作模式
82
2.2 设定点控制特性
83
2.3 控制类型
85
2.3.1 受控值
86
2.3.2 限定值
86
2.3.3 控制器响应
86
2.4 指示
86
2.4.1 LE D 指示
86
2.4.2 报警继电器 K 1
87
2.5 监视
87
2.5.1 负载和电源电压的监视
87
2.5.2 绝对值监控电流
87
2.5.3 设备温度监视
88
2.5.4 散热装置的监视
88
2.6 在使用总线模块时的设定点处理
88
2.7 T hyro-A 的附加功能
.
故障和起因
如果出现了故障,则可能是由于功率、电压或,电流高于调功器或负载铭牌上所 规定的值。从原理上说,这可能会导致调功器和负载的损坏。
AEG 产品安装和维护指南说明书

[I B 1 Sha 2 Pur 3 Adj 4 Put 5 Leg 6 AE 7 Out 8 Inst 9Inst AppendixAcronym AE AEGs ALT AMT AOC NOP OKS PAA R/O TCE TOCnsert O riefing aring of risk/o rpose of this ustment Eve tting risk allo gal/contractu alignment p tline for the A tructions for tructions for 1: Owner’s T ms in this do Adjustmen Adjustmen Alliance Le Alliance M Actual Out Non-Owne Overall KR Project Alli Risk/oppor Target Cos Target OutOwner O on Ad opportunity –briefing pap ents – comm cation in per ual context – rocess overv AE alignmen completing t returning the Team Attend cument nt Event nt Event Guid eadership Te anagement T tturn Cost er Participant RA score iance Agreem rtunity st Estimate tturn Cost Organiz djustme – setting the er ...............ercial contex rspective .....why the AE view ............nt workshop a the questionn e completed dees ............delines eam Team t mentzation][ent Eveoverall conte ....................xt .....................................Guidelines r ....................and who sho naire ............questionnair ....................Insert N ent alig ext ...........................................................................really matter .....................ould attend .......................res o gnmen ........................................................................................................................................................................................................of Proje t proce ........................................................................................................................................................................................................ect] ess...........2 ...........2 ...........3 ...........4 ...........5 ...........6 ...........7 ...........9 (10) (11)1Sh 1.1Und Allia be 1.2All hav1.3The to r 1.4Wh cult con per 2Pu 2.1The be 2.2Spe(a) (b) (c) (d)2.3 Not Sceharing of r der the ‘3-lim ance Particip borne unilate risk/opportu ve agreed are e ‘Adjustmen reached infor hile focussed tural alignm nventional ris rformance is urpose of t e legal/comm developed d ecifically, this explains provides performa describes andprovides te that it is enario Quest isk/oppor mb’ compens pants) or reta erally by the nity is share e retained un nt Event alig rmed alignm d primarily o ment. The p sk-transfer m the norm.this briefin mercial conte during the All s briefing pap the contractu guidance on ance alliance s the AE alig instructions essential yo tionnaire.rtunity – se sation frame ained unilate Non-Owner ed collectivel nilaterally by nment proce ent on what on commerc rocess is d mindset to an ng paperext of the Adj iance Develo per: ual/commerc n the comme ; gnment proce for completin ou read this etting the work, risk/op erally by the Participants ly except for y the owner.ess’ describe risks/opportu cial alignmen designed to alliance min justment Eve opment Phas cial context o ercial rationa ess and conf ng and return s briefing pa overall co pportunity is Owner. The (NOPs). r those types ed in this bri unities will be nt the proce facilitate a ndset and a ent Guideline se are set ou of Adjustmen ale for the tre firms the logi ning the atta aper thoroug ontexteither share ere is no opti s of risk/opp efing paper e borne unila ess is as m radical an “one-team” e es and the pr ut in this brief t Events (AE eatment of ri stics for the ched ‘Scena ghly before s ed collectivel on for risk/op portunity the enables the aterally by th uch, if not m d rapid tran environment rocess by wh fing paper. Es);sk/opportuni AE alignmen ario Question starting to c ly (by all the pportunity to participants participants e owner. more, about nsition from where high-hich they will ity in a high-nt workshop,nnaire’.complete the e o s s t m -l -,e3Ad 3.1The Eve gai 3.2AsR/O col par R/O uni Ow 3.3The pro will wheuni djustment e diagram b ent (AE) nee nshare/pains noted aboveOptionO is shared lectively by t rticipants O is borne ilaterally by t wner e default pre ovisions for r be conside ere the ass laterally by th Events – elow illustra eds to be con share regime e, there are o the ∙ Pro Est coll ∙ If th Out the ∙ If th targ imp ∙ It is the Ow ∙ The the esumption is isk/opportun red to be an sociated risk he Owner.commerc ates the NOP nsidered in t e.only two optio Com ovisions for ri timate (TCE)lectively by t he risk/oppor tturn Cost (T he risk/oppor gets may nee pact. In other s not required TCE for risk wner.e Owner will net costs as that all risks ity within the n Adjustment k/opportunity ial contex P compensa the context o ons for how r mmercial an isk/opportun ) consistent w he participan rtunity eventu TOC) or any o rtunity eventu ed to be adju r words, it is d or appropr ks (or opportu need to mak ssociated wit s/opportunitie e TCE the p t Event (AE)y, should th xtation framew of this comp risk/opportun nd administr ity must be i with the risks nts. uates there i of the non-co uates then th usted, consis an Adjustme iate to allow unities) that ke an allowa th Adjustmen es are share participants m ) i.e. they m hose circum work. The co ensation mo nity (R/O) is s rative implic ncluded in th s/opportunitie s no adjustm ost targets. he TOC and/stent with the ent Event. any provisio are being bo nce, separat nt Events.ed. In order t must align on ust agree th mstances ev oncept of an odel and in p shared/alloca cationshe Target Co es being born ment to the T /or non-cost e agreed ass ons in the bui orne unilatera te from the T to be able to n what situat he circumsta ventuate, wi Adjustment particular the ated: ostne argetlimb 3ociated ild-up ofally by the TCE, for o finalise the tions, if any,nces, if any,ll be borne t e e, , e4Pu 4.1It is risk bala4.2The dia (a)(b)4.3At t and sha utting risk s important to k/opportunity ance betwee Increas risk/opp retained ProsLower TOC - minimal provisio for risk included within TCEe decisions a l’ towards eit The furth more rob upwards The upwa the risk/o left). The the comm adversar the AE align d Proponent)aring of risk/a allocation o understand y should be s en two extrem sing number o portunity items d by the Owne C ond Expecthigh ad High pdispute Negati unfoldiOwner Higher at the AE alig ther end of th her to the rig bust will be th pressure on ard pressure opportunity is e more you tu mercial foun ial form of co ment worksh ) clearly und allocation.n in persp d that there i shared collec mes, as illust ofs rCons t lots of AEs, dmin otential for e ve events ing = r’s risk r AOC (?)gnment work he spectrum ght the dial he ‘one team the TOC.e on the TOC s retained u urn the dial a ndation of th ontract.hops we will derstandsthe ectives no ‘right’ o ctively or reta trated in sim The ris sharing/allo ‘dial’kshop(s) can – in this res is turned (ie m’ foundation C can be eas nilaterally by away from fu he alliance, s explore this eimplication or ‘wrong’ ap ained unilate plistic terms skocation’n be likened spect:e. more risk/ of the allian sed by increa y the Owner ull risk/oppor shifting it ba concept furt ns ofmoving proach, and rally by the O in the follow All/morisk/o sharePros Little/no enadmin of AE All risk/opp shared ‘obehaviour’ Lower AOC to turning th /opportunity nce. The dow asing the num r (ie. turn th rtunity sharin ack towards ther so that g the dial(tothe decision Owner involv wing diagram:ost pportunity is ed collectively sergy on Esortunityone team’ C (?)Hi c w he ‘risk sharin shared colle wnside is that mber of situa e dial back ng the more a traditiona the whole gr o the left) aw n on whether ves striking a :Cons Higher TOC – increased contingency within TCEng/allocation ectively), the t this will put ations where towards the you weaken al potentially roup (Owner way from full r a net e e n y r l5Le 5.1Cla clea 12.12.5.2Givin d 5.3The Typ rise (a)(b)gal/contra ause 12 of t arly: 2The Pa Alliance 12.2.1 t 12.2.2 t them; o 12.2.3 a except that the indicate 3 ThePa 12.3.1 t opportu 12.2.2 t opportu 12.2.3 t retained elsewhe ven this legal determining a ere are time pically, in eac e to the misa Key playeAdjustme which ma mean tha they faile such ass There wasame un the Adjusactual con the draft PA articipants h e Works, reg those risks o the Participa or any provision for those ris e Participan ed in the Adju rticipants ack the types of s unity is share the types of s unity is retain there are no d unilaterally ere in this Ag l context the and clarifying es when the ch of those c lignment:ers involved ent Event Gu any of the k at an Adjust ed to have re umptions an as little or no derstanding stment Eventntext – wh AA sets out have agreed gardless of w or opportuniti nts could (or n was made sks or oppor nts have spe ustment Eve knowledge th scenarios in ed are not ex scenarios in ned unilateral other types y by the Own greement to guidelines d g how risk/op ALT is una cases the fo in developin uidelines. Ty key players, ment Event egard to the A nd therefore b o attempt to of the Adjus t alignment w y the AE G the legal co d to share a whether: ies are within r should) rea for them in t rtunities (or p ecifically agr ent Guideline hat: the Adjustm xhaustive; the Adjustm lly by the Ow of events or er, except fo be an Adjust developed at pportunity wi able to reac llowing root ng the TCE f ypically, the T more accust would apply Adjustment E by default, w ensure that stment Event workshop(s).Guidelines ontext of the all risks and n the control asonably hav the Target O portions of s reed will be s.ment Event G ment Event G wner is exhau circumstanc or events or c tment Event.the AE align ll be shared ch agreemen causes (amo failed to gras TCE/TOC re tomed to co y if the assu Event Guide were a shared t new/replace t Guidelines s really m e Adjustment d opportuniti of the Partic ve foreseen o utturn Cost,such types o e retained s uidelines for uidelines for ustive; and ces for which circumstance .nment works amongst the nt on contes ongst others sp the signifi eport contain onventional te umptions pro elines which d risk/opportu ement memb as the peop attert Event Guid ies associat cipants;or made allow of risks or op solely by the r which a risk r which a risk a risk or opp es expressly hop(s) play a e participants sted Adjustm ) are signific icance/impor ed lists of ‘a endering, tho oved to be in made no me unity. bers of the A ple who were delines very ted with the wance for pportunities)e Owner as k or k or portunity is stated a critical role s. ment Events.cant in giving rtance of the assumptions’ought would ncorrect. But ention of any ALT had the e involved in y e) s e . g e ’ d t y e n6AE 6.1Sel com whe coll 6.2Ple alig own 6.3A [Pro trea wor 6.4Ide forw use maj hav Thi eva 6.5The [Insert Al E alignmen ected perso mplete and re ether the ris lectively (by ease note tha gnment proce nership of th Insert Name oponent, see ated as an A rkshop to en ally, based o ward a singl e it as the Ad jor divergen ve a differen rd Party Est aluating the t e timeline for ignment Pro nt process nnel from th eturn the att sk (or oppor all Participan at getting ind ess, in order e agreed out e of Alliance eking to reac AE. It may b able the grou on the respe e set of Adj djustment Ev ce between nt set of AE timator, will two Project P r the alignme cess Schedu s overview he Owner an tached Scen rtunity) in ea nts) or retain dividual, not r to ensure t tcome – i.e. Facilitator]-ch alignment be necessary up to reach a ective output ustment Eve vent Guidelin the risk/opp Guidelines f make an al Proposals. ent process is ule Graphic]wd each Prop ario Questio ach of the h ed unilateral corporate, p the level and we want you -facilitated al t for each h y to hold a alignment on s of the alig ents Guidelin nes (to form portunity app for each Pro lowance for s shown belo ponent, throu onnaire giving hypothetical lly by the Ow erspectives d quality of ur personal v lignment wo ypothetical s shorter follow n all scenario nment works nes seeking part of Sche petite of the oponent. In t the differen ow:ugh this brief g their perso scenarios w wner (i.e. an A is fundamen understandin view, not the rkshop will b scenario whe w-up worksh os. shops, the O agreement edule 5 of th two groups that case th nce in risk/o fing paper, a onal/individua would/should Adjustment E ntal to the int ng, debate a ‘corporate p be conducte ether or not hop soon aft Owner will be from each P he PAA). Wh it may be n e Owner, gu pportunity p are asked to al view as to d be shared Event). tegrity of the and eventual osition’. ed with each it would be ter the main e able to put Proponent to here there is necessary to uided by the rofiles when o o d e l h e n t o s o e n7Ou 7.1The info 7.2 The 7.3Thi as aCom tim D a y 1, [I n s e r t D a t e ]1234D a y 2, [i n s e r t D a t e ]5 6a6b7D a y 3, [I n s e r t D t ]8 9autline for t e overall pu ormed set of e workshop w s workshop a contingenc mmencing [I me] . A draft s 14.00 Pre 14.30 Fra wo 15.45 Bre 16.00 On rev alig 17.30 Sum pro 18.00 Da 14.00 Set 14.20 On rev alig 15.45 Bre 16.00 On rev alig 17.30 Sum clo 18.00Da 14.00 Set 14.20 On revthe AE alig rpose of the draft Adjustm will be facilita will be held cy in case ex Insert Date]sample agen eliminariesaming theorkshopeak screenview and gnmentmmariseogressay 1 closet up day 2 screenview and gnmenteak screenview and gnmentmmarise andse out ay 2 closet up day 3 screenview and gnment wo e AE alignm ment Event G ated by[Inser over 3 x ha xtra time is ne starting at [da is set out ∙ Opening ∙ Confirm ∙ Set up fo parking ∙ Review c ∙ Commer foundat ∙ Align on ∙ Process ∙ Work th or not it ∙ Review ∙ Reflect &∙ Insights ∙Overnig ∙ Team ch ∙ Agree pr ∙ Work th or not it∙ Work th or not it ∙ Review ∙ Reflect &∙ Overnig ∙ Review a ∙ Agree pr ∙ Work th or not it orkshop a ment worksh Guidelines. rt Name of A alf-day sessio eeded): [Insert time](t below: g comments, b purpose and or effective co lot) and confi compensation rcial context –ion. n expectations briefing rough and aim t would consti Day 1 progres & correct exer and lessons f ht actions / re heck in & revie riorities for us rough and aim t would consti rough and aim t would consti Day 2 progres & correct exer ht actions/req any overnight riorities for us rough and aim t would consti and who s op with eac Alliance Facili ons [Insert L (sharp) and a brief introduc agenda for th onversations, rm commitme n framework a – there is no ‘s of each othe m to reach alig itute an Adjus ss and remain rciserom this sessi equestsew any overni se of remainin m to reach alig itute an Adjus m to reach alig itute an Adjus ss & behaviou rcise questst actions se of remainin m to reach alig itute an Adjus should atte ch Proponen itator].Location](with aiming to fin tions, housek his workshop agree protoco ent to particip and putting A right’ answer.er at this work gned view for stment Event ing scenarios ion ight actionsng timegned view for stment Event gned view for stment Event rs ng timegned view for stment Eventendnt is to align h a 4th half-d nish no later keepingols (conduct, pate positively Es in proper p . Co‐creating kshop r each scenari r each scenari r each scenari r each scenari n on a well-day reserved than [insert outputs, y perspective the right o whether o whether o whether o whether -d t9b10Day 4 [Inse7.4 Wefou7.5 Proguidwho7.6 Thecoma va(a)(b)(c)7.7 NOScecomcomalig15.45 Bre16.00 Onrevalig17.30 Sumclo18.00 Dayert Date]e expect thatrth session aoponents aredance provido will be attee workshop smmercial rolealuable contGiven thaan AE, itIn practicof circum(AMT) beAllianceleadershiProponenpeople wHoweverOTE* - It is aenario Questmpleted/returmplications ingnmenteakscreenview andgnmentmmarise andse outy 3 / workshopt only theseavailable as ae invited to bded below. Pending.should be ate in the estabribution to that in most inis expectedce, once themstances justefore beingProject Manip role in thents can chowho will be rer, legal represa requirementionnaire (refrned the Scento the proce∙Work thor not it∙Review s∙Reflect &∙General∙Overnigp closee 3 half-daya contingencring a total oProponents attended by thblishment anhe conversatinstances it wthat all nomialliance is utifies an AE wreferred tonager and ralliance atteoose to bringesponsible fosentation atnt that eachfer instructioenario Questess.rough and aimt would constistatus & confi& correct exerfeedback andht actions/reqPlacehosessions wicy.of between 1are requiredhose who nend/or deliveryion. In this rewill be the ALinated Propounder way itwill initially tathe ALT. Oelevant nomend this workg membersor the Projecthis workshoperson atteons below). Htionnaire or vm to reach aligitute an Adjusirm next stepsrcised residual issuquests (if contolder if requireill be require0 and 12 ped to confirmeed to be invy of the allianespect:LT that deteronent ALT mis expectedake place wiOn that basisminees for thkshop.of their comct Proposal Top is not expeending the wHaving peopvice versa ingned view forstment Eventsuestinuing to dayeded but particeople to the win writing novolved becaunce along wirmines whethembers attenthat the discthin the Allias it is expeche AMT andmmercial anTCE developected or requworkshop cople attend thetroduces unhr each scenariy 4)cipants shouworkshop ino later than [use they havith others whher circumstand.cussion on wance Managected that thed those withnd estimatingpment) to thuired.mpletes ande workshophelpful and uo whetheruld keep theline with the[Insert Date]ve a relevantho can makeances justifywhether a setement Teame nominatedh a relevantg team (i.e.e workshop.d returns thewho haven’tunnecessaryee]teytmdt..ety8Ins 8.1The _Mthe Pro 8.2Inse sele of t 8.3Forind be (co give as t 8.4Bel sce thin des of d 8.5The Ple newstructions e questionna yName.xlsx ) filename w oponent Nam ert your full ect from the he ALT, click r each of th icate (by ins treated as alumn F). Avoe full details the concept ow the [Ins enarios (A, B nk there mig scription that detail as in th e spreadshee ease do not re w row or rem Please no ‘rig s for comp aire is provide ). The first st ith your nam me]_ [insert n name in ce drop-down l k on cell E2 a e[Insert Num erting a ‘1’ in an Adjustmen oid using co in column F of an Adjustm sert Number B) covering s ght be misali t clearly expl he set scena et is protecte emove the p move rows).e complete a ght’ or ‘wrong wo pleting the ed as an Exc tep is to save me - eg. [Ins name] .xlsx .ll B2, your i list which org and select “A mber of Sce n column C, nt Event (AE olumn E (‘?’ F. [Note: - as ment Event o r of Scenari situations tha ignment. If y ains the con rios). ed so you ca protection or ** NO nd return the g’ answers. ork with othe e question cel spreadsh e the file un sert Name] w nitials in cel ganisation yo ALT”, if not le enarios]set s D or E) whe E). Give reas indicating ‘D sume that ea only comes i ios] set sce at are not al you do inser ntext, cause n only edit ce try to change OTE –very e questionna Please do no ers to respon nnaireheet (CDHRP nder a new n would save t l C2 (please ou represent eave cell E3 scenarios, re ether or not y sons for you Depends’) if ach scenario into play afte enarios, you lready cover rt extra scen and associa ells that are e the structu important **aire on your ot check you d to the ques P_AEG_Q1-[name replac the file as: C e use 3 lett t. If you are n blank. ead the scen you think tha ur answer in possible but o occurs afte er the TOC is may insert red by the se narios pleas ted implicatio intended to b re of the spre *own – reme ur responses stionnaire.[Insert Propo cing the “My.CDHRP_AEG ters ), click o nominated a nario carefu at situation s the ‘Comme if you do us er the TOC is s locked in.] t one or tw et scenarios e ensure yo ons (with the be user chan eadsheet (e.mber there a with others onent Name]Name ” bit of G_Q1-[Insert on cell D2 to as a member lly and then should/would ents’ column se it, please s locked in –wo additional s, where you ou provide a e same level ngeable. .g. insert are or] f t o r n dn e – l u a l9Ins 9.1 E-m 9.2The no (a) (b)9.3If y Constructions mail your com e Proponent later than [In a list of th for each you have any ntact Person s for return mpleted (rena Contact Rep nsert Date] co hose who wil person atten y technical p n.ning the c amed) Excel presentative omprising:ll be attendin nding the wor problems with ompleted file to Propo is required t ng the works rkshop a com h the spread question onent Contac to submit an hop, andmpleted indiv dsheet, pleas nairesct Represent e-package t vidual Excel Q se have you tative.to the Contac Questionnair r query forw ct Person by re.arded to the y eAppendixNamFacilx 1: Owne elitators & Ober’s Team bserversAttendees RoleAlliance Fa Alliance Fa Third Party Fairness Rsacilitator acilitator y Estimator eviewerOr[In Al Fa [In Al Fa [In Th Es [In Fa Re Strictl rganisationnsert Name o lliance acilitator] nsert Name o lliance acilitator] nsert Name o hird Party stimator] nsert Name o airness eviewer]y ConfidentialPage 11ofof of ofl。
AEG 全系列产品手册.pdf说明书

全系列产品手册德国现代工业的先驱全球电气技术的领导者AEG 于1887年在德国柏林成立,很多创造和发明来自于AEG :•第一个长距离交流电力输配系统在德国运行•第一个三相电站-奥博斯普瑞发电站•第一条长途电气轨道在德国投入运行•第一台带温度控制及压缩机系统的电冰箱• 第一条高压直流HVDC 长距离输电线路贯穿整个非洲大陆•第一台鼠笼型转子异步电动机• 第一个128兆瓦蒸汽发电厂(1915),为当时世界最大容量机组•1938年首个以SF6为绝缘介质的专利•第一个序列化生产中压真空灭弧装置•第一台自由喷射式空气断路器•第一台环氧树脂浇注式干式变压器• 迄今世界最大的柴油发电机电源油路总路开关 德国制造 AEG Oil aircuit breakerType CO301-30/400 MOD自1937年建厂以来一直使用良好,92年新建变配电大楼后停止使用。
胜利矿(1926~2010)抚顺信和纱厂(1933~1992)上海中国驻德国大使蒋作宾参观AEG 工厂(1928)绵阳风洞群CRH 高铁车载电力保障ConocoPhillips 海上石油平台上海通用汽车工厂华星光电澳门威尼斯人酒店根植中国,源远流长目录12013914034121044226064329084534094637104738114849中压产品系列US3.0气体绝缘环网柜MAST 自动电源转换系统SecoVac 系列VL 真空断路器SecoVac 系列VB2 Plus 真空断路器SecoVac 系列VB2 Plus G-15发电机出口真空断路器SecoVac 系列iVB 智能真空断路器SecoVac 系列WCH 真空接触器SecoVac 系列CR193真空接触器低压产品系列MEAT 自动电源转换系统MEG 空气断路器M-PACT 空气断路器Record Plus TM 塑壳断路器Record C Plus 塑壳断路器Elfa 微型断路器AT10自动转换开关E9SPD 浪涌保护器工控产品系列AIC 低压变频器MC 电动机保护器AE 综合保护装置MS10智能仪表TDG 电力电容器FCR 滤波电抗器PFC 功率因数控制器EFC 可控硅投切开关ASW 有源电力滤波器AEG 全系列产品01产品概述产品特点US3.0全绝缘环网柜,适用于12~24kV 以下配电系统,以灵活多变的功能组合方式,为环网供电、双辐射供电、以及电缆馈电网络的工商业区和农村乡镇等供电负荷大、密度高的地区提供各种系统化解决方案。
AEG调功器
德国AEG 电源系统公司是世界著名的电源调功器生产商和供应商,其Thyro-S,-A,-P 系列调功器产品在全球电加热领域享有盛誉。
产品广泛使用在阻性、感性、变压器等负载,精度达到0.5%,具有多种控制和通讯方式,具有自诊断功能,具有专利的ASM自动功率分配功能,可以液晶显示,可以实现远程/就地控制的转换。
可控硅耐反击穿电压高,风冷情况下电流可达2900A,带有快熔和散热片。
AEG公司已经为法国空中客车公司,德国奔驰汽车公司,德国宝马汽车公司,德国瓦克公司(多晶硅),拜耳公司,巴斯夫公司,易普森电炉公司,洛玻公司,南玻公司,英国Pilkington上海玻璃公司(常州),等世界著名公司提供产品和服务。
其他国内著名客户包括:北京爱协林工业炉公司,上海易普森工业炉公司,上海斯坦因工业炉公司,北京瑞士高奇公司,上海ald工业炉公司,德国UAS公司,德国SORG公司,天津LOI 公司,天津美国赛科沃克工业炉公司,无锡天龙科技炉业公司,杭州金舟炉业公司;南京高速齿轮有限公司,中国二重精衡传动公司,大连重工,太原重工,中信重工,陕西法士特,綦江齿轮传动,大连瑞士SKF轴承公司、天津SEW减速机退火炉、美国铁木肯(无锡)轴承公司、上海宝钢硅钢厂、武钢硅钢厂、鞍山钢铁集团连续冷轧线、涟源钢铁有限公司、马钢比欧西气体有限公司,上海BASF聚亚氨酯特气(中国)有限公司、南京扬子巴士夫石化、上海GEA公司(奶粉设备)、中钢吉林炭素有限公司、帝斯曼工程塑料(江苏)有限公司、湖南株洲硬质合金集团公司、保定乐凯集团、新乡金龙管业、秦川机床集团,北京龙源制冷设备有限公司、兰州大成真空科技有限公司、上海纳博热工业炉有限公司、液化空气(杭州)有限公司、林德工程(杭州)有限公司、吉林晨鸣纸业有限公司,长春一汽公司车轮装备部、浙江巨石玻纤集团公司(中国最大)、泰山玻纤集团公司、厦门金鹭特种合金有限公司、咸阳彩虹电子玻璃有限公司等。
北京三磊创基科技发展有限公司是AEG 电源系统公司在中国的核心分销商,负责AEG调功器产品在中国的具体销售和技术服务。
Thyro-A说明书.pdf

Hainault Lannion MilanoTours PenangSingapore VitoriaGermanyUSA电加热加热元件供电电源变压器Thyro-P e.g. Thyro-PPI, I²介质Profibus DP / Modbus R T U /e.g.Thyro-P ready for operationThyro-P ready for operationThyro-P ready for configurationThyro-P ready for configurationAEG PSS Thyro-P is listed in the SIEMENS productcatalog(A&D)as a partner-productAEG PSS Thyro-P is listed in the SIEMENS productcatalog(A&D)as a partner-product优异的过程控制方式+ 减少调试的时间和成本优异的过程控制方式+ 减少调试的时间和成本A400-280H F RLP用于1相负载的单相调功器用于三相负载的三相两控经济型调功器用于三相负载的三相调功器A Thyro-A系列230额定主(电源)电压 230, 400, 500, 690V 16额定电流16 A - 2900 AH内置半导体快熔F强制冷却 (1新Thyro-S/A版本继电器输出和负载监视 (仅用于Thyro-S/A)功率测量和调节 (仅用于 for Thyro-S/A)切掉第一个半波以避免电流冲击切掉第一个半波以避免电流冲击没有谐波的周波没有谐波的周波To = 循环周期20-5000msTs = 导通时间Toff= 关断时间To = 100ms / 1sec (5 / 50 line periods)ααααααα上限值EndvalueSetpoint [%]设定值[%]设定值[%]V-调节设定值特性V 2–调节设定值特性V -负载[V ]V -负载[V ]V-LoadV-LoadThyro-A 1A...H1单相可控硅交流电源控制器具有内置半导体快熔熔断器和通信总线接口,共有周波TAKT、移相、半波QTM三种工作方式和U, U²二种调节/控制方式。
AEG-Thyro-2A调功器安装说明

AEG-Thyro-2A 调功器安装说明(中文说明书)德国AEG电源系统公司是世界着名的电源调功器生产商和供应商,其Thyro-S,-A,-P系列调功器产品在全球电加热领域享有盛誉。
产品广泛使用在阻性、感性、变压器等负载,精度达到%,具有ProfiBus-DP, ModBus RTU, DeviceNet , RS232, 4-20m 等多种控制和通讯方式,具有自诊断功能,具有专利的ASM自动功率分配能,可以液晶显示,可以实现远程/ 就地控制的转换。
可控硅耐反击穿电压高,风冷情况下电流可达2900A,带有快熔和散热片。
4. 安装及接线说明Thyro-2AX—Thyro-2AX可整合成VDE 0610用于工业用途—Thyro-2AX应该竖直安装与墙面的间隙应》100mm与顶墙面的间隙应》150mm设备下方不能有发热源—Thyro-2AX 应安装在配电箱内,以防人员误碰配电箱内要保证有适当的通风—Thyro-2AX适用于干燥的室内环境内部不能有污染及腐蚀性气体进入—Thyro-2AX 应根据当地电气设备管理部门规定正确接地—Thyro-2AX能够与主电源(VDE 0160)之间切断为了避免故障,应遵守下面的安装手册—如果可能,主电缆及控制电缆应分开布线—用短的绞接线(避免缠绕)—单元应正确接地注意:如果要打开Thyro-2AX在修理或维护前一定要确保设备已与所有的电源回路断开连接,如果做不到这样,只能由熟悉该设备并知道潜在风险的有资质的人员进行相关工作。
在紧急状态,脉冲锁不能用于安全停机。
例如在晶闸管发生短路时 不能断开脉冲锁开关,对于变压器负载和控制横向控制和电源分离 的,Thyro-2AX 必须通过脉冲锁来进行释放,只有当电压用于电源系 统时方可释放,这必须在电源无电压时进行设定。
半导体保险用于晶闸管短时的短路或过流进行保护,当轻微过载时 并不立即动作,因此不适用于 VDE 调节规定的线路保护。
AEG说明
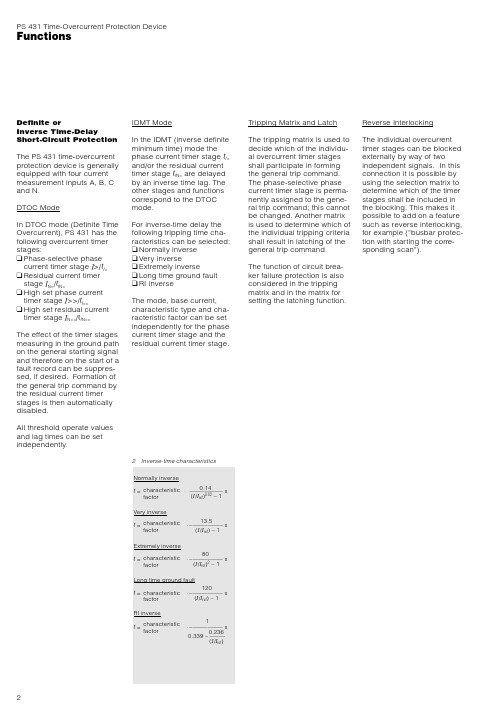
2FunctionsDefinite orInverse Time-DelayShort-Circuit Protection The PS 431 time-overcurrent protection device is generally equipped with four current measurement inputs A, B, C and N.DTOC ModeIn DTOC mode (Definite Time Overcurrent), PS 431 has the following overcurrent timer stages:u Phase-selective phase current timer stage I >/t I >u Residual current timer stage I N>/t I N>u High set phase current timer stage I >>/t I >>u High set residual current timer stage I N>>/t I N>>The effect of the timer stages measuring in the ground path on the general starting signal and therefore on the start of a fault record can be suppres-sed, if desired. Formation of the general trip command by the residual current timer stages is then automatically disabled.All threshold operate values and lag times can be set independently.IDMT ModeIn the IDMT (inverse definite minimum time) mode the phase current timer stage t I >and/or the residual current timer stage t I N> are delayed by an inverse time lag. The other stages and functions correspond to the DTOC mode.For inverse-time delay the following tripping time cha-racteristics can be selected:u Normally inverse u Very inverseu Extremely inverseu Long time ground fault u RI inverseThe mode, base current,characteristic type and cha-racteristic factor can be set independently for the phase current timer stage and the residual current timer stage.Tripping Matrix and Latch The tripping matrix is used to decide which of the individu-al overcurrent timer stages shall participate in forming the general trip command.The phase-selective phase current timer stage is perma-nently assigned to the gene-ral trip command; this cannot be changed. Another matrix is used to determine which of the individual tripping criteria shall result in latching of the general trip command.The function of circuit brea-ker failure protection is also considered in the tripping matrix and in the matrix for setting the latching function.Reverse Interlocking The individual overcurrent timer stages can be blocked externally by way of two independent signals. In this connection it is possible by using the selection matrix to determine which of the timer stages shall be included in the blocking. This makes it possible to add on a feature such as reverse interlocking,for example (”busbar protec-tion with starting the corre-sponding scan”).3Functions(continued)Cir Circuit Br cuit Br cuit Breaker Failur eaker Failur eaker Failure e Pr Protectionotection When the trip command is issued a timer stage formonitoring the circuit breaker is also started. When this timer stage has elapsed due to a sustained general star-ting condition, then the circuit breaker failure signal is issued.The input of a circuit breaker failure signal through an appropriately configured binary input brings about a non-delayed trip command if the general starting signal is present.Measuring Cir Measuring Circuit cuit MonitoringMeasuring circuit monitoring of the phase currents is based on the principle of maximum allowable magnitu-de unbalance. In this case the arithmetic difference between the maximum and minimum phase currents as referred to the maximum phase current is compared with the set threshold operate value. With the appropriate settings it is also possible to monitor the phase currents even with an economy-type CT connection (CTs in only two phases).Operating Data Measur Measurementement The PS 431 time-overcurrent protection device acquires the following measuredoperating data and updates them at approximately 1 s intervals, as long as a fault is not being processed at the time:u Maximum value of the three phase currents u Phase currents u Residual currentThe measured data are displayed as r.m.s. values and are normalized to the corresponding nominal value of the protection device.Event CountingThe following events are counted by the PS 431 time-overcurrent protection de-vice:u Tripping on faults u Faultsu Warning entriesFault Data Acquisition After the end of a general starting condition, the follo-wing measured fault data are acquired:u Running timeu Short-circuit current Fault LoggingProtection signals at the time of a fault are stored in chro-nological order. A total of five faults with a maximum of 64start/end signals each, can be held in a circular memory - the signal memory. If more than five faults occur and no faults have been erased in the interim, the oldest fault record will be overwritten. A four-digit resettable counter identifies the individual faults by serial number.The fault records can be read from the local control panel.Self-MonitoringExtensive monitoring routines in the PS 431 ensure that internal hardware or software faults will not lead to mal-functioning of the protective relaying system. When the auxiliary voltage V A is turned on, a function test is carried out. Cyclic self-monitoring tests are run during operati-on. If test results deviate from the default value, a fault signal is issued. The result of fault diagnosis determines whether a protective blocking will occur or whether only a warning will be issued. The faults diagnosed in con-junction with self-monitoring are stored in a memory(monitoring signal memory).The contents of the monito-ring signal memory can be read from the local control panel.4Design3Local control panelMechanical Design The PS 431 consists of an aluminum case with reversi-ble connector blocks and adjustable side brackets.The case can be used for wall surface mounting or for panel flush mounting, as desired. In either case the unit is connected by threaded terminal ends.The processor module car-rying the local control panel is mounted directly on the rear of the removable front panel. It is connected to the combined I/O (input/output)module by a flat connecting cable. The I/O module con-tains the voltage supply, the input transformers, the output relays, and the optical coup-lers for the binary inputs.In the front panel are win-dows for the display and label strips located behind them. The keyboard for the integrated local control panel is also located in the front panel.Figure 4 on Page 10 shows the case and mounting dimensions.Local Contr Local Control Panel ol Panel The integrated local control panel comprises two 4-digit,7-segment LCD displays and six function keys. The set-tings, signals and measured variables are numerically coded. This code is called the address and is displayed in the lower 4-digit 7-segment display. Access barrierssafeguard against accidental or unauthorized changing of settings.Eight LED indicators areprovided for visual signaling.The first two have permanent signal assignments, while the other six can be configured as desired (see Page 9).The control panel has two label strips. The strip on the left is used to label the LED indicators, and the strip on the right provides a visual record of frequentlyperformed control steps.Both strips can be replaced and labeled by the user asdesired.5T echnical DataType T ests (continued)InsulationVoltage testAccording to IEC 255-52 kV AC, 60 sFor the voltage test of the power supply inputs, direct voltage (2.8 kV DC) must be used.The PC interface must not be subject-ed to the voltage test.Impulse voltage withstand test According to IEC 255-5Front time: 1.2 µsTime to half-value: 50 µs Peak value: 5 kVSource impedance: 500 ΩMechanical Robustness Vibration testAccording to IEC 255-21-1, test severity class 1Frequency range, in operation:10 to 60 Hz, 0.035 mm,60 to 150 Hz, 0.5 gFrequency range, during transport:10 to 150 Hz, 1 gShock response and withstand test,bump testAccording to IEC 255-21-2,test severity class 1Acceleration: 5 g/15 g Pulse duration: 11 msSeismic testAccording to EN 60255-21-3, test procedure A, class 15 to 8 Hz, 3.5/1.5 mm,8 to 35 Hz, 10/5 m/s 23 × 1 cycleRoutine TestsAll tests according to EN 60255-6and DIN 57 435 Part 303Additional thermal test100 % controlled thermal endurance test, inputs loadedEnvironmental ConditionsAllowable ambient temperatures Operating temp.:– 5 °C to + 55 °C Storage temp.:– 25 °C to + 55 °C Shipping temp.:– 25 °C to + 70 °C Ambient humidity rangeRelative humidity to preclude any condensation;45 to 75 % (annual mean)NoticesManufacturer’s Conformity Statement The product designated as ”PS 431Time-Overcurrent Protection Device”has been developed and manufac-tured in conformity with the interna-tional standard series EN 60255-6and in accordance with the provisions of the Low Voltage Directive issued by the European Community.DQS CertificateThe internationally recognized,independent and impartial associa-tion for the certification of quality assurance systems, DQS (Deutsche Gesellschaft zur Zertifizierung von Qualitätssicherungssystemen), has awarded AEG the DQS certificate,thereby certifying that AEG hasintroduced and uses a state-of-the-art quality assurance system thatcomplies with all requirements stated in EN ISO 9001 that apply to its products and services.General DataDesignCase suitable for wall surfacemounting or panel flush mounting.Installation Position Vertical ± 30°Degree of ProtectionIP 51 according to DIN VDE 0470and EN 60259 or IEC 529Weight 3.4 kg Dimensions See Page 10T erminal Connection Diagram See Page 10PC InterfaceDIN 41652 connector , type Submin-D, 9-pin.A special connecting cable is required for electrical isolation.T erminalsThreaded terminal ends M4,self-centering with wire protection for conductor cross-sections of 0.5 to 6 mm 2 or 2 x 2.5 mm 2Creepage Distances and Clearances Per IEC 255-5, series CType TestsAll tests according to EN 60255-6and DIN 57435 Teil 303Electromagnetic Compatibility (EMC)Interference suppression According to EN 55022 and DIN VDE 0878 Part 3, class B 1 MHz burst disturbance test According to IEC 255 Part 22-1,class IIICommon mode test voltage: 2.5 kV Differential test voltage: 1.0 kV T est duration: > 2 sSource impedance: 200 ΩImmunity to electrostatic discharge According to EN 60801 Part 2,severity level 3Contact discharge,Single discharges: > 10Holding time: > 5 s T est voltage: 6 kV T est generator:50 to 100 MW, 150 pF/330 ΩImmunity to radiated electromagnetic energyAccording to ENV 50140, level 3Antenna distance to tested device:> 1 m on all sidesT est field strength, frequ. band 80 to 1000 MHz: 10 V/m T est using AM: 1 kHz / 80 %Single test at 900 MHz:AM 200 Hz /100 %Electrical fast transient / burst requirementsAccording to IEC 801-4, test severity level 3Rise time of one pulse: 5 nsImpulse duration (50% value): 50 ns Amplitude: 2 kV / 1 kV Burst duration: 15 ms Burst period: 300 ms Source impedance: 50 ΩSurge immunity testAccording to IEC 1000-4-5,test level 3T esting of power supply circuits,unsymmetrically / symmetrically operated linesOpen-circuit voltage front time / time to half-value: 1.2 / 50 msShort-circuit current front time / time to half-value: 8 / 20 ms Amplitude: 1 / 2 kVPulse frequency: > 5 / min Source impedance: 12 / 42 ΩImmunity to conducted disturbances induced by radio frequency fields According to IEC 65A/77B (Sec) 145/110, test level 2Disturbing test voltage: 3 V Power frequency magnetic field immunityAccording to EN 61000-4-8, level 4Frequency: 50 HzT est field strength: 30 A/mAlternating component (ripple) in d.c.auxiliary energizing quantity of measuring relaysAccording to IEC 255-1112%6Definite-Time Overcurrent Protection (DTOC)Phase CurrentThreshold operate value I >:Increments:0.4-4.0 I nom 0.1Delay time t I >:Increments:0.00-9.99 s 0.0110.0-99.9/∞ s0.1Threshold operate value I>>:Increments:0.4-40.0/∞ I nom 0.1Delay time t I >>:Increments:0.00-9.99 s 0.01Residual CurrentThreshold operate value I N >:Increments:0.05-2.00/∞ I nom 0.05Delay time t I N>:Increments:0.00-9.99 s 0.0110.0-99.9/∞ s0.1Threshold operate value I N >>:Increments:0.10-8.00/∞ I nom 0.05Delay time t I N>>:Increments:0.00-9.99 s 0.0110.0-99.9/∞ s0.1Inverse Definite Minimum Time Overcurrent Protection (IDMT)Phase Current Base current I B :Increments:0.40-4.00 I nom0.01Characteristic factor:Increments:0.10-1.00 I nom0.05Characteristic type:Normally inverse Very inverseExtremely inverseLong time ground fault RI inverseThreshold operate value I>>:Increments:0.4-40.0/∞ I nom 0.1Delay time t I >>:Increments:0.00-9.99 s 0.01Residual CurrentBase current I NB orThreshold operate value I >:Increments:0.04-0.40/∞ I nom0.010.08-0.80/∞ I nom0.01Characteristic factor:Increments:0.10-1.00 I nom0.05Characteristic type:Normally inverse Very inverseExtremely inverseLong time ground fault RI inverse Delay time t I N>:Increments:0.00-9.99 s 0.0110.0-99.9/∞ s0.1Threshold operate value I N>>:Increments:0.10-8.00/∞ I nom 0.05Delay time t I N>>:Increments:0.00-9.99 s 0.0110.0-99.9/∞ s0.1Technical Data(continued)Inputs and OutputsMeasurement Inputs CurrentNominal current I nom :1 and 5 A (terminal choice)Nominal consumption per phase:< 0.3 VA at I nom Load rating:continuous: 4 I nom for 10 s: 30 I nom for 1 s: 100 I nomFrequencyNominal frequency f nom :50 or 60 Hz Operating range:45 to 65 HzBinary Signal Inputs Equipment:2 optical coupler inputs (freely configurable)Function assignment:see Page 9Nominal V I n,nom :24-250 V DCOperating range:0.8-1.1 V I n,nom with a residual ripple of up to 12% of V I n,nomPower consumption per input:35 mA ± 30% at V I n, nom = 24 V DC 15 mA ± 30% at V I n,nom = 48 V DC 4 mA ± 30% at V I n,nom = 60-250 V DC Output RelaysEquipment:4 output relays (freely configurable)Function assignment:see Page 9Contact rating Rated voltage:300 V DC, 250 V AC Continuous current: 5 A Short-time current:30 A for 0.5 sMaking capacity:1000 W (VA) at L/R = 40 ms Breaking capacity:0.2 A at 220 V DC and L/R = 40 ms4 A at 230 V AC and cos ϕ = 0.4Local Control PanelInput or output of protection data:via six keys and two 4-digit displays State and fault signals:8 LED indicators(2 permanently assigned,6 freely configurable)Function assignment:see Page 9PC Interface Transmission speed:4800 baudA special PC connecting cable is required for connecting to a PC (see Page 12).SettingsGlobal Function Parameters General Starting without I N> or I N>>with I N> or I N>>Trip Command 1/2t I >t I >CBFt I >t I N>t I >t I N>CBF t I >t I >>t I >t I >>CBF t I >t I >>t I N>t I >t I >>t I N>CBF Latching 1/2without latchingCBF t I N>t I N>CBF t I >>t I >>CBF t I >>t I N>t I >>t I N>CBF t I >t I >CBFt I >t I N>t I >t I N>CBF t I >t I >>t I >t I >>CBF t I >t I >>t I N>t I >t I >>t I N>CBF Trip Command 2/2without t I N>>with t I N>>Latching 2/2without latching at t I N>>with latching at t I N>>Blocking E1without blockt I N>>t I N>t I N>t I N>>t I >>t I >>t I N>>t I >>t I N>t I >>t I N>t I N>>t I >t I >t I N>>t I >t I N>t I >t I N>t I N>>t I >t I >>t I >t I >>t I N>>t I >t I >>t I N>t I >t I >>t I N>t I N>>Blocking E2See selection for blocking E1Mode for Current Timer Stages Definite-time-lag (DTOC)Inverse-time-lag (IDMT)Information OutputOperating Data Measurement Max. phase current IncrementsI P ,max : 0.00-18.00 I nom 0.01Phase currentsI A : 0.00-18.00 I nom 0.01I B : 0.00-18.00 I nom 0.01I C : 0.00-18.00 I nom 0.01Residual current I N : 0.00-3.50 I nom 0.01Event CountingNumber of trip commands:0 to 9999Number of faults: 0 to 9999Fault Data AcquisitionIncrementsRunning time:0.00-99.99 s0.01Short-circuit current:0.00-36.00 I nom 0.01Fault LoggingUp to 5 faults are stored, then the oldest fault is erased.Up to 64 signals per fault can bestored, subsequent signals trigger the overflow indication.–7T echnical Data(continued)Typical Characteristic DataReset timefrom 2-fold threshold operating value to 0:≤ 25 ms Resetting ratio:≥ 0.95Minimum output pulse for trip com-mand:100 msDeviationsTime-Overcurrent Protection 1)Threshold Operate Values, Phase-Current StagesDeviation when I < 0.2 I nom : ± 15%Deviation when I ≥ 0.2 I nom : ± 5%Variation at 20°C ± 20 K: ± 2.5%Variation at V A,nom ± 20%: ± 1%Variation at f nom ± 5%: ± 5%Threshold Operate V alues, Residual Current Stages Deviation: ± 5%Variation at 20°C ± 20 K: ± 2.5%Variation at V A,nom ± 20%: ± 1%Variation at f nom ± 5%: ± 5%Delay Time of Definite-Time-Delayed StagesDeviation: ± 1% or ± 30 ms Variation at 20°C ± 20 K: ± 1%Delay Time of Inverse-Time-Delayed StagesDeviation: ± 7.5%Variation at 20°C ± 20 K: ± 2.5%Variation at V A,nom ± 20%: ± 1%Variation at f nom ± 5%: ± 5%Operating Data Measurement 2)Currents I A , I B , I C , I N each > 0.4 I nom Deviation: ± 5%Variation at 20°C ± 20 K: ± 2.5%Variation at V A,nom ± 20%: ± 1%Variation at f nom ± 5%: ± 5%Fault Data Acquisition 2)Short-circuit current > 0.4 I nom :Deviation: ± 5%Variation at 20°C ± 20 K: ± 2.5%Variation at V A,nom ± 20%: ± 1%Variation at f nom ± 5%: ± 5%Settings (continued)Circuit Breaker Failure Protectiont CBF : 0.00-9.99/∞ s; increments: 0.01Measuring-Circuit Monitoring Mode:without I A , I BI A , I B , I CI mcm >:0.25-0.50 I Pmax ; increments: 0.05t mcm :0.00-9.99s; increments: 0.010.0-99.9/∞ s; increments: 0.1Power SupplyNominal auxiliary voltage V A,nom :24-60 V DC and (internally switcha-ble) 110-250 V DC / 100-230 V AC 3)Operating range for direct voltage:0.8 to 1.1 V nomwith a residual ripple of up to 12% of V A,nom For alternating voltage:0.9-1.1 V A,nomNominal consumption:approx. 5 W at V A = 220 V DC1)Deviations referred to the set value with sinusoidal measured variables,total harmonic distortion ≤ 2%,ambient temperature 20°C, and nominal auxiliary voltage V A,nom 2)Deviations referred to the respective nominal value with sinusoidal measured variables,total harmonic distortion ≤ 2%,ambient temperature 20°C, and nominal auxiliary voltage V A,nom3)V A,nom = 230 V AC only for units with a corresponding indication on the type identification label (beginning with hardware version 302)Signal ListSignal InputsThe signal inputs allow inter-vention in the Protection sequence. Each input can be set for one of the signals given in Table 1. However, a given signal may be as-signed to only one input. The signal names refer to the”active” state of the input signal. Each input can be set as follows:active = low signal oractive = high signal.Abbreviations forFunction GroupsCBF:Circuit breakerfailure protectionDTOC:Definite-timeovercurrentprotectionIDMT:Inverse definiteminimum timeovercurrentprotectionMAIN:Main functionMON:Self-monitoringOutput RelaysThe output relays are freelyconfigurable and can beassigned any of the signalslisted in Table 3. Any signalcan also be assigned to morethan one free output relay forcontact multiplication purpo-ses.All relays are operated in anenergize-on-signal arrange-ment (‘open-circuit function’,the make contact is closedwhen the signal is present)except for the case where anoutput relay is configured forthe signal ”MAIN: Blocked/faulty.” In this case the relayoperates in an normally-energized arrangement(‘closed-circuit function’) andthe break contact is closedfor the blocked/faulty conditi-on.LED IndicatorsTwo LED indicators on thelocal control panel havepermanently assigned sig-nals (Table 2a). The other sixLED indicators are freelyconfigurable and can beassigned any of the signalslisted in Table 2b.89Signal List(continued)T able 2a:Permanently Configured LED Indicators Indi-Func-Signalcator tionGroupTable 3:Freely Configurable Output RelaysRe-Func-Signallays tion GroupTable 2b:Freely Configurable LED Indicators Indi-Func-Signal cator tionGroupT able 1:Freely Configurable Signal Inputs Input Func-Signaltion GroupDimensional Drawing and T erminal Connection Diagram10Connection Example11。
单相电力调整器(调功器)的使用说明书
第六章 故障处理及保养维护................................................................................ 34
6.1 故障处理 ......................................................................................................................... 34 6.2 保养维护 ......................................................................................................................... 34
第三章 安装及配线 ................................................................................................. 7
3.1 3.2 3.3 3.4 3.5 3.6 开箱检查 ........................................................................................................................... 7 使用条件 ........................................................................................................................... 7 安装 ................................................................................................................................... 8 电气配线 ........................................................................................................................... 8 基本接线原理图 ............................................................................................................... 9 端子说明 ......................................................................................................................... 10
Thyro A说明书

Hainault Lannion MilanoTours PenangSingapore VitoriaGermanyUSA电加热加热元件供电电源变压器Thyro-P e.g. Thyro-PPI, I²介质Profibus DP / Modbus R T U /e.g.Thyro-P ready for operationThyro-P ready for operationThyro-P ready for configurationThyro-P ready for configurationAEG PSS Thyro-P is listed in the SIEMENS productcatalog(A&D)as a partner-productAEG PSS Thyro-P is listed in the SIEMENS productcatalog(A&D)as a partner-product优异的过程控制方式+ 减少调试的时间和成本优异的过程控制方式+ 减少调试的时间和成本A400-280H F RLP用于1相负载的单相调功器用于三相负载的三相两控经济型调功器用于三相负载的三相调功器A Thyro-A系列230额定主(电源)电压 230, 400, 500, 690V 16额定电流16 A - 2900 AH内置半导体快熔F强制冷却 (1新Thyro-S/A版本继电器输出和负载监视 (仅用于Thyro-S/A)功率测量和调节 (仅用于 for Thyro-S/A)切掉第一个半波以避免电流冲击切掉第一个半波以避免电流冲击没有谐波的周波没有谐波的周波To = 循环周期20-5000msTs = 导通时间Toff= 关断时间To = 100ms / 1sec (5 / 50 line periods)ααααααα上限值EndvalueSetpoint [%]设定值[%]设定值[%]V-调节设定值特性V 2–调节设定值特性V -负载[V ]V -负载[V ]V-LoadV-LoadThyro-A 1A...H1单相可控硅交流电源控制器具有内置半导体快熔熔断器和通信总线接口,共有周波TAKT、移相、半波QTM三种工作方式和U, U²二种调节/控制方式。
Thyro-A说明书

Hainault Lannion MilanoTours PenangSingapore VitoriaGermanyUSA电加热加热元件供电电源变压器Thyro-P e.g. Thyro-PPI, I²介质Profibus DP / Modbus R T U /e.g.Thyro-P ready for operationThyro-P ready for operationThyro-P ready for configurationThyro-P ready for configurationAEG PSS Thyro-P is listed in the SIEMENS productcatalog(A&D)as a partner-productAEG PSS Thyro-P is listed in the SIEMENS productcatalog(A&D)as a partner-product优异的过程控制方式+ 减少调试的时间和成本优异的过程控制方式+ 减少调试的时间和成本A400-280H F RLP用于1相负载的单相调功器用于三相负载的三相两控经济型调功器用于三相负载的三相调功器A Thyro-A系列230额定主(电源)电压 230, 400, 500, 690V 16额定电流16 A - 2900 AH内置半导体快熔F强制冷却 (1新Thyro-S/A版本继电器输出和负载监视 (仅用于Thyro-S/A)功率测量和调节 (仅用于 for Thyro-S/A)切掉第一个半波以避免电流冲击切掉第一个半波以避免电流冲击没有谐波的周波没有谐波的周波To = 循环周期20-5000msTs = 导通时间Toff= 关断时间To = 100ms / 1sec (5 / 50 line periods)ααααααα上限值EndvalueSetpoint [%]设定值[%]设定值[%]V-调节设定值特性V 2–调节设定值特性V -负载[V ]V -负载[V ]V-LoadV-LoadThyro-A 1A...H1单相可控硅交流电源控制器具有内置半导体快熔熔断器和通信总线接口,共有周波TAKT、移相、半波QTM三种工作方式和U, U²二种调节/控制方式。
AEG操作手册【精选文档】
AEG UPS 典型操作手册编制:审核:批准:宁波海越新材料电仪部2015年10 月备注:1、此典型操作手册适用于除行政中心3#、4#UPS以外的AEG品牌UPS。
2、操作过程中步骤与指导书中不一致时,应停止操作,汇报班长及主管技术员.AEG UPS 典型操作手册一.UPS 的原理框图二.UPS 人机界面1 LED 指示灯: 红, 黄, 绿 (从上到下)2 图形化的液晶显示 (LCD)3 4个功能按键 4回车键(ENTER)1. LED 指示灯含义:红灯闪烁: 系统失败=> 需要服务 黄灯闪烁: 自认为失败/预告, 特殊的系统状态 绿灯闪烁: 静态旁路运行 绿灯常亮: 逆变状态运行 声音报警:紧急情况,系统失败(旁路柜上)脱机旁路开关(主机柜内)2.键盘操作4 个功能键的选择依靠于LCD 显示的菜单内容。
当前选定的功能会在LCD 的右侧小区域显示一个图标。
回车键(ENTER)用来确认选定的子菜单、控制功能和设置数值。
回车键也可用来退出子菜单。
3.运行状态显示如果在一段时间里,没有操作按键,系统会自动返回,显示系统的运行状态图。
如果好几分钟后,没有按键操作,LCD的背景照明灯会熄灭。
一旦某键被按下,背景灯会马上点亮。
运行状态图包含三个部分:左侧是系统状态结构图。
设备的各个功能单元被图形化的表示出来。
当此单元出现故障或报警时,此功能单元的图标会闪烁。
另外,当前的功率流向也以较粗的条棒形状标出来.在中间部分,显示比较重要的测量值。
可以数字和柱形显示,因设备结构不同而不同。
在最右侧,显示当前的按键.只要没有被锁定,可以根据设备状态启动和关闭各个变换器。
也可确认蜂鸣器的声音信号,在有故障或系统消息发生时会有蜂鸣声.按下底部的按键可进入各个功能单元的状态/测量值菜单.比较详细的数据都集中在这里。
UPS在正常情况下的运行显示图:Capac. utilis. L1-L3在手动旁路状态时UPS的运行显示图(Q29 在位置2):Capac. utilis. L1-L3如果在手动旁路运行,UPS是与负载分离开的,负载直接从市电供电.用一个额外的箭头标示此状态。
AEG综保说明书

主要性能指标
内容 系统使用寿命 系统平均无故障时间 遥测量 开关量 遥控、遥调正确率
CPU 负载
遥信变化送到主站 遥测量送到主站 遥控命令 画面调用时间 画面刷新周期 SOE 分辨率
指标 ≥ 10 年 系统 MTBF ≥ 30000 小时 遥测合格率 >99.9% 遥信正确率 >99.9% 100% 正常情况下负荷率≤ 15%(任意 5 分钟内平均) 事故情况下负荷率≤ 35%(任意 1 分钟内平均) ≤ 1.5 秒 ≤ 1.5 秒 ≤ 1.5 秒 ≤1秒 ≤1秒 1ms
03
电力天眼PMSky系统
系统概述 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 05
软件功能 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 06
讯。 ● 支持普通以太网、移动网络GPRS、CDMA、GSM等方式和设备进行通讯。 ● 支持主流的电力规约、电厂DCS、PLC、DDC、现场总线、智能仪表等1000多种厂家设备的通讯。 ● 支持通过移动GPRS、CDMA网络与控制设备或其它节点通讯,数据变化传输的流量控制机制保证了系统应用中节省通
讯费用。
产品外形尺寸 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 13
电气接线图 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 14
AEG调功器资料

Provisional Description, Profibus-DP for Thyro-P Version 2 Order number:2000000391Table of Contents1.Introduction (2)2.Cyclical Data Exchange (3)3.PIV Interface (5)4.Calculating the Actual Values (7)5.Diagnostic Messages (9)6.Digital Inputs (10)7.Local operation of the Setpoint Motorpoti (11)8.Project Planning of the "Thyro-P" DP Slave (12)9.Annex (17)1. IntroductionThis communications card adds the Profibus-DP communications interface to the Thyro-P (thyristor power controller). It can be used for integrating the Thyro-P into complex systems using the fieldbus. In addition, there are 4 digital electrically isolated inputs on the card (see section 6). These can be accessed via terminal X21.The scope of delivery includes:- A Profibus card- A cover for installing in the Thyro-P- A diskette containing the files needed for project planning- These instructionsThe Profibus connection uses a 9-pin sub D socket (X20). It provides data lines A and B as well as an electrically isolated supply voltage (5 V, 80 mA).Figure 1.1 Profibus card2. Cyclical Data ExchangeCyclical data traffic is used for transmitting the input and output data. The cyclical data traffic has been expanded by a parameter identifier value (PIV) mechanism for transmitting acyclical data (see section 3).Output dataWith the output data the following values are transmitted.Octet Purpose1 2Parameter identifier3 4Parameter valuePIV interface56Setpoint master78Setpoint master error9FunctionsTable 2.1 Cyclical data master"Setpoint master"With it the power of the load can be regulated.Setpoint master 16383== 100 %"Setpoint master error"This value is used in case of failure of the profibus.Setpoint master error16383== 100 %Tip: If the Steller is in remote operation ("Setpoint master" is active only), it can be useful, if the "Setpoint master" is written also on the " Setpoint mopo". So that it is possible to switch from remote to local with out give a skip function to the regulator. This function can activated by setting the second parameter in the parametriertelegramm to 1.“Functions”Over this byte special functions can be executed in the Thyro-P. For executing a function the funct. nr. must be transmitted. Whereby each function is implemented internal by continuous write a value to a PNU address ( see Table 2.2 ).Funct. Nr.Purpose PNU Value0No function--1No function--2No regulator suppressor3203Regulator suppressor3214No acknoledge30205Acknoledge30216No Ext. Error message32807Ext. Error message3281Table 2.2 Executable functionsInput dataActual values (voltage, current, etc.) can be transferred with the input data. However, not all values are always required. Consequently, in order to reduce the transmission time, it has been made possible to select which parameters are to be transferred (see section 8).Octet Purpose1 2Parameter identifier3 4Parameter valuePIV interface5 4 digital inputs 6-?Actual values Table 2.3 Cyclical data slave3. PIV InterfaceCyclical data traffic is supplemented by the PIV (parameter identifier value) interface for transmitting acyclical data. The master can use this interface for reading and editing the process parameters. The PIV interface comprises the following parts:1. Order response identifier (OI)For transmitting commands and fault messages (see Table 3.2)2. Toggle bit order (TO)Handshake for handling orders3. Parameter number (PNU)The required parameter is selected using the PNU4. Parameter valueOctetPurposeBit position765432101OI TO res.HI PNUParameter identifier 2LO PNUParameter value 3HI byte4LO byteTable 3.1 Structure of the PIV interfaceOrder identifier (OI)The master signals the type of order to the slave using the OI (order identifier). The slave responds with the response identifier when it has carried out the order (see Table 3.2).OIFUNCTIONMASTER SLAVE0No order No order1Request parameter Transmit parameter2Edit parameter Inadmissible OI3Illegal PNU.4Parameter cannot be alteredTable 3.2 Order response identifierToggle bit order (TO)The master uses the toggle bit TO to indicate that there is a new order. In response, the slave performs the order and then changes the toggle bit TO (TOs = TOm) to indicate that the order has been carried out. The master cannot send a new order until this happens.This method ensures that each order initiated by the master is processed correctly. Figure 3.1 shows the sequence of events.rNew requestRepeat request Unable to process requestSend responseNew request Send responseNew request Figure 3.1 Order processing sequenceThe "No order" order should be processed first after the slave is initialised (restarted) in order to initialise the toggle bit in the slave. This ensures that the first order is processed correctly.Parameter number (PNU)The PNU is used for selecting the desired parameter value. Refer to the Annex for the table of parameters with the PNU, value range and identifier. Please refer to the "Thyro-P" instructions for more information about the individual values.Parameter valueThe parameter value of the master is ignored in the "Request parameter" order. Once the order has been processed correctly, the current value is sent continuously with cyclical data traffic until a new order is sent. This makes it possible to transmit a further value cyclically via the PIV interface.The parameter value is transmitted to the power controller when the "Edit parameter" order is sent,provided it is admissible for the parameter to be changed. Then, the content of the PNU is transmitted continuously with cyclical data traffic (as for "Request parameter").4. Calculating the Actual ValuesThe voltage, current and power values are normalised and transmitted in LSB. The following conversions must be performed in order to obtain the values in volts, amps or watts:CurrentIeff_1= Ieff_LSB_L1 * I_TYP / I_TYP_LSB [A]Ieff_2= Ieff_LSB_L2 * I_TYP / I_TYP_LSB [A]Ieff_3= Ieff_LSB_L3 * I_TYP / I_TYP_LSB [A] VoltageUeff_1= Ueff_LSB_L1 * U_TYP / U_TYP_LSB [U]Ueff_2= Ueff_LSB_L2 * U_TYP / U_TYP_LSB [U]Ueff_3= Ueff_LSB_L3 * U_TYP / U_TYP_LSB [U]PowerP1= Peff_LSB_P1 * P_TYP / P_TYP_LSB [W]P2 = Peff_LSB_P2 * P_TYP / P_TYP_LSB [W]P3 = Peff_LSB_P3 * P_TYP / P_TYP_LSB [W]Ptot = Peff_LSB_Ptot * P_TYP / P_TYP_LSB [W] ConductanceGeff_1= Geff_LSB_L1 * I_TYP * U_TYP_LSB / ( I_TYP_LSB * U_TYP * 1024 )[S]Geff_2= Geff_LSB_L2 * I_TYP * U_TYP_LSB / ( I_TYP_LSB * U_TYP * 1024 )[S]Geff_3= Geff_LSB_L3 * I_TYP * U_TYP_LSB / ( I_TYP_LSB * U_TYP * 1024 )[S] TemperatureTemp= ( Temp_LSB - 1000 ) / 3.82[°C]The values for calculating the power are 32-bit values; this means they have to be calculated from the 16-bit values as follows:Peff_LSB_Px= Peff_LSB_Px_H* 65536 + Peff_LSB_Px_LP_TYP= P_TYP_H* 65536 + P_TYP_LP_TYP_LSB= P_TYP_LSB_H* 65536 + P_TYP_LSB_LThe conversion factors must be read out via the PIV interface (see section 3).Conversion factor PNU (address)I_TYP90U_TYP93P_TYP_H121P_TYP_L122I_TYP_LSB113U_TYP_LSB118P_TYP_LSB_H119P_TYP_LSB_L120Table 4.1 PNUs of the conversion factorsAll other actual values are normalised as follows:Period1== 1 µsTotal setpoint16383== 100 %Actual on-time value50== 1 sOn-angle alpha1== 0.01° elLED&Relais Bit 0== LED …control“Bit 1== LED …limit“Bit 2== LED …pulse lock“Bit 3== LED …fault“Bit 4== LED …overheat“Bit 5== Relais (1)Bit 6== Relais (2)Bit 7== Relais (3)SW Active Bit 0== Terminal 10 activeBit 1== Terminal 11 activeBit 2== Setpoint master activeBit 3== Setpoint mopo active5. Diagnostic MessagesThe slave sends device-related diagnostic information to the master in the event of a fault.The structure is explained in Table 5.1.Octet Bit position Messages80SYNC fault6MOSI in peak current limitation90Undercurrent in load circuit1Overcurrent in load circuit4Undervoltage in mains5Overvoltage in mains100Regulator suppressor3Limit4Overtemperature115SSC faultTable 5.1 Structure of the diagnostic telegram4 bytes are transmitted with the diagnostic message. Each bit corresponds to a signal which displays the current status of the Thyro-P. Please refer to the Thyro-P instructions for more details about the individual values."Static diagnosis" is triggered if there is a communication malfunction between the Profibus card and Thyro-P; the "SSC fault" message is transmitted. In this case, no data exchange between the master and the slave is possible. This fault indicates that the Profibus card is not inserted in its slot correctly, for example.6. Digital InputsThe Profibus card provides three digital inputs as well as an input for the activation of the localoperation (see section 7), via the 9-pin sub D plug (X21). These are automatically reproduced on the Profibus (see Table 2.3, Octet 5).Pin Designation Function1Earth Earth2M1Ground for IN0 and IN13IN 0Input 04IN 1Input 15M24Ground / internal 24 V supply 6M2Ground for IN2 and IN37IN 2Input 28IN 3Input 39+24+24 V / internal 24 V supplyFigure 6.1 Connection assignment X21Inputs 0 and 1 always relate to ground M1 and inputs 2 and Loc always relate to ground M2. There is also a 24 V supply provided for connecting simple signallers such as limit switches, etc. This would make the following connection possible, for example:SFigure 6.2 Example of connecting inputs7. Local operation of the Setpoint MotorpotiIn certain situations, e.g. failure of the profibus, is it sometimes necessary to change the desired value quickly. This can take place over the LBA. It is however pedantic for certain applications too. . In order to remove this deficiency, the possibility of the local operation of the Setpoint Motorpoti was created over Switchs.Over the input Loc (pin 8) can be activated the local operation of the Setpoint Motorpoti of desired value. It is then possible to switch the value SW_ACTIV between remote (open) and local (closed) over the input IN0 (pin 3).In the local operation mode the Setpoint Motorpoti value can be changed over the inputs IN1 and IN2. Whereby the desired value with pressed switch around 1% per second changes. With simultaneous operation of the UP and Down keys the desired value is reduced.For the local operation the plug X21 is to be connect as follows.UpFigure 7.1 Local operation of the Setpoint MotorpotiNote: When using the local operation the following points are to be considered:1. To prevent a precipitous modification of the setpoint when switching from remote to local, the“setpoint motorpoti" is set in the remote operation equal to the "setpoint master". This takes place automatically by setting the second byte in the Parametrietelegramms to 1 (see figure 8,7).2. With the switch "local" is closed ("4 digital inputs " bits 0 = 0) the process regulatur must bedeactivates and to the "setpoint master" is set equal to "setpoint total", in order to enable a jump-free switching from local to remote. For this the “setpoint total” is to be transferred cyclically.3. With switch from local to remote, the process regulator participates to initialize with the “setpointtotal” and has activate afterwards.8. Project Planning of the "Thyro-P" DP SlaveThis section describes project planning with the "COM PROFIBUS" project planning tool from Siemens.First copy the following files into the corresponding folders (see the instructions supplied with the project planning tool):•PSS104C0.GSD Device master file• PSS_R.DIB Normal display• PSS_D.DIB Diagnostic display•PSS_S.DIB Display in special operating statusThen start the tool. The following window appears once the project planning for the master has been completed successfully ( Figure 8.1 ):Figure 8.1 Editing window for a master systemIt is now possible to assign a new slave to the master. Do this by selecting the product group (on the right-hand side). The Thyro-P is in the Others group. Enter the slave address after you have placed a slave under the master ( Figure 8.2 ).Figure 8.2 Selecting the slave addressThis address must correspond to the address in the Thyro-P thyristor power controller, because the "modify slave address" function is not supported. Note that the Thyro-P has to be switched off after the power controller address has been changed before the new address is activated.This leads you to the "Slave characteristic" window ( Figure 8.3 ) in which you can select the desired slave, in this case Thyro-P. Then enter a name so as to be able to identify the slave unambiguously later on.Figure 8.3 Selecting the DP slaveNow the slave can be configured. Do this by clicking the "Configuration..." button which calls up the "Configuration" window ( Figure 8.4 ).Figure 8.4 Standard configuration of the Thyro-PThe first six modules (0 – 5) are already occupied. Never change these. Table 8.1 provides a more detailed explanation of their function.NO.IDENTIFIER SIZE DIRECTION SIGNIFICANCE02AA 2 words Output PIV interface master/slave11AA 1 word Output Setpoint master21AA 1 word Output Setpoint master error38DA 1 byte Output Functions42AE 2 words Input PIV interface slave/master58DE 1 byte Input 4 digital inputs (bits 0 – 4)Table 8.1 Significance of the default settingsThe actual values which are to be transmitted cyclically can now be entered from module 6 onwards. Do this by marking row 6 and clicking the "order number ..." button, which causes the "Auswahl über Bestellnummer für Slot x" window to appear ( Figure 8.5 ). Please do not be confused by the termFigure 8.5 Selecting the cyclical valuesAfter you have selected the desired value (in this case, "Power L1") and clicked the "take over" button, the value appears in row 6. You can then enter another actual value in row 7. shows a sample configuration.The cyclical transfer of input data resulting from this setting is shown in Table 8.2.BYTE 1 – 456-910 – 1112 – 13 VALUE PIV interface4D in Power L1Load current L1Load voltage L1 Table 8.2 Structure of cyclical transfer (slave/master)Figure 8.6 Example of actual value selectionIt is now possible enter the comments, input and output addresses (see the instructions supplied with the project planning tool).Each actual value that is cyclically transferred, extends the Parametrier telegram by a byte. With its assistance the identifier of the desired actual value is transferred. The Parametrierung can press through the button "Parametrieren" ( Figure 8.3 ) and following operation of the button "Hex..." ( Figure 8.7 ) to be controlled.Figure 8.7 ParametrierenThe identifier of the individual actual values starting from the third byte (pos 2) into the Parametrier telegram are entered. The second byte (pos 1) serves the automatic transfer of the "Setpoint master" for the activation on the "Setpoint mopo" (see section 2 ).The link between the master and slave is displayed when the configuration of the Thyro-P has been completed ( Figure 8.8 ). The symbol shows the status of the Thyro-P, in this case "run-mode".Figure 8.8 Display of the link between the master and slave9. AnnexPNU Symbol Name Value range Combo-Opt Unit R / W Defaultr / w TAKT 5BETR Operating mode0...4TAKT, VAR, SSSD,SOFT, Rectifier6MOSI Op. of molybdenum silicide rods0..2OFF, RAMP, STELL r / w OFF 7TDS Thyrosoft delta circuit0...1OFF, ON r / w OFF 8SEB Service mode0...1OFF, ON r / w OFF0...1OFF, ON r OFF 9ASM Automatic synchronisation formultiple power controllerapplications11TYP Number of controlled phases 1...3r / w 1 phase Table 9.1 Operating modePNU Symbol Name Value range Combo-Opt Unit R / W Default 12AN1Phase angle of the 1st half-wave0...180°el.01°el r / w60°el 13SST Soft-start time (setting)0...9980 ms20 ms r / w120 ms 14SDN Soft-down time (setting)0...9980 ms20 ms r / w120 ms 15T0_TI Cycle period0...T0_MAX20 ms r / w 1 s 17TSMAX Maximum cycle on-time0...T0_TI20 ms r / w 1 s 18TSMIN Minimum cycle on-time0...T0_TI20 ms r / w0 ms 19SYNC_EXT Synchronous cycle0...1Internal/external r Internalinternal/external20SYNC_ADR Synchronous cycle address0...655350 ms10 ms r / w 1 ms 21T0_KORR T0 correction0...1OFF, ON r OFF Table 9.2 TimesPNU Symbol Name Value range Combo-Opt Unit R / W Default 22RE Regulation0...8Uload^2, Uload eff,r / w Uload^2Iload^2, Iload eff,Real power, Speed,U_const, I_const,Without regulationRegulator suppressor request0...1 1 == Request r / w032REG_SPERR_ANFTable 9.3 RegulationsPNU Symbol Name Value range Combo-Opt Unit R / W Default 40V_IE Front pulse limit position0...180°el0.01°el r / w180°el 41H_IE Back pulse limit position0...180°el0.01°el r / w0°el Table 9.4 LimitsPNU Symbol Name Value range Combo-Opt Unit R / W Default 48UEMA Maximum r.m.s. voltage setpoint0...65535 V V r / w440 V 49IEMA Maximum r.m.s. current setpoint0...65535 A A r / w110 A 50PMA_H Maximum power setpoint0...65535 xW65536 W r / w0 W 51PMA_L Maximum power setpoint0...65535 W W r / w48400 W 57SW_SPRUNG Setpoint jump0..1OFF, ON r / w ON94SW_ACTIV Setpoint activation0...15Bit 0 = 1 (Setpointt10 activ) ...r / w1552SW Setpoint linking0...3_ADD, IADD, _PRO,IPROr / w_ADD 42SW_INP_IU_10Input voltage/current terminal 100...2 5 V, 10 V, 20 mA r / w20 mA44STA_REGLER Control start regulator inputterminal 10Depending onSW_INP_IU_100.3 mV0.6 mV1.22 µAr / w292 µA(240)45STE_REGLER Control end regulator inputterminal 10Depending onSW_INP_IU_100.3 mV0.6 mV1.22 µAr / w20000 µA(16383)43SW_INP_IU_11Input voltage/current terminal 110...2 5 V, 10 V, 20 mA r / w 5 V46STA_POTI Control start potentiometer inputterminal 11Depending onSW_INP_IU_110.3 mV0.6 mV1.22 µAr / w72 mV(240)47STE_POTI Control end potentiometer inputterminal 11Depending onSW_INP_IU_110.3 mV0.6 mV1.22 µAr / w 5 V(16383)53STA_MASTER Control start master0...100 %0.0061%r / w0 % 54STE_MASTER Control end master0...100 %0.0061%r / w100 %(16383) 55STA_MOPO Control start motor potentiometer0...100 %0.0061%r / w0 % 56STE_MOPO Control end motor potentiometer0...100 %0.0061%r / w100 %(16383) Table 9.5 Control characteristicPNU Symbol Name Value range Combo-Opt Unit R / W Default 514TEMP Temperature sensor0..3none, PT100,PT1000, NTCr / w none59TEMP_KVE Characteristic number0...7Characteristic 0 ...Characteristic 7r / w No charac-teristicTable 9.6 TemperaturePNU Symbol Name Value range Combo-Opt Unit R / W Default 63IST_1Actual value output 10..120 mA, 10 V--r / w20 mA 64IST_2Actual value output 20..120 mA, 10 V--r / w20 mA 65IST_3Actual value output 30..120 mA, 10 V--r / w20 mA 60OF_1Offset 10...20000 µAµA r / w0 µA 61OF_2Offset 20...20000 µAµA r / w0 µA 62OF_3Offset 30...20000 µAµA r / w0 µA 84DAC_1_VA_U Measuring instrument full-scaledeflection DAC1, voltage0...10000 mV mV r / w10 V85DAC_1_VA_I Measuring instrument full-scaledeflection DAC1, current0...20000 µAµA r / w20 mA86DAC_2_VA_U Measuring instrument full-scaledeflection DAC2, voltage0...10000 mV mV r / w10 V87DAC_2_VA_I Measuring instrument full-scaledeflection DAC2, current0...20000 µAµA r / w20 mA88DAC_3_VA_U Measuring instrument full-scaledeflection DAC3, voltage0...10000 mV mV r / w10 V89DAC_3_VA_I Measuring instrument full-scaledeflection DAC3, current0...20000 µAµA r / w20 mA81DAC_1_CTRL Configuration registeranalog output 1bit-by-bit r / w1882DAC_2_CTRL Configuration registeranalog output 2bit-by-bit r / w2083DAC_3_CTRL Configuration registeranalog output 3bit-by-bit r / w2266I_FA_1Scale end value currentactual value output 10...65535 A A r / w150 A67I_FA_2Scale end value currentactual value output 20...65535 A A r / w150 A68I_FA_3Scale end value currentactual value output 30...65535 A A r / w150 A69U_FA_1Scale end value voltageactual value output 10...65535 V V r / w500 V70U_FA_2Scale end value voltageactual value output 20...65535 V V r / w500 V71U_FA_3Scale end value voltageactual value output 30...65535 V V r / w500 V72P_FA_1_H Scale end value poweractual value output 10...65535 xW xW r / w073P_FA_1_L Scale end value poweractual value output 10...65535 W W r / w50000 W74P_FA_2_H Scale end value poweractual value output 20...65535 xW xW r / w075P_FA_2_L Scale end value poweractual value output 20...65535 W W r / w50000 W76P_FA_3_H Scale end value poweractual value output 30...65535 xW xW r / w077P_FA_3_L Scale end value poweractual value output 30...65535 W W r / w50000 W78ALPHA_FA_1Scale end value alphaactual value output 10...180°el.01°el r / w180°el79ALPHA_FA_2Scale end value alphaactual value output 20...180°el.01°el r / w180°el80ALPHA_FA_3Scale end value alphaactual value output 30...180°el.01°el r / w180°el Table 9.7 Actual valuesPNU Symbol Name Value range Combo-Opt Unit R / W Default 90I_TYP Power controller rated current0...65535 A A r / w110 A 113I_TYP_LSB Rated current in LSB0...65535r97UE_I Voltage converter ratio0...65535r / w100 92R_BUERDE_I Load resistor current0...653 ohm.01 ohm r / w0.91 ohm 93U_TYP Power controller connectionvoltage0...1000 V V r / w400 V 118U_TYP_LSB Rated voltage in LSB0...65535r96UE_U Voltage converter ratio0...1000r / w16 123TYP_BEREICH Voltage range changeover0...2230 V, 400 V, 690 V r / w400 V 91R_BUERDE_U Load resistor voltage0...65535 ohm Ohm r / w1680 ohm124R_BUERDE_U_1Load resistor voltagerange 10...65535 ohm Ohm r / w1680 ohm125R_BUERDE_U_2Load resistor voltagerange 20...65535 ohm Ohm r / w1680 ohm95U_NETZ_ANW Mains voltage user0...1000 V V r / w400 V 121P_TYP_H Power controller rated power0...65535 xW xW r / w0 122P_TYP_L Power controller rated power0...65535 W W r / w44000 W 119P_TYP_LSB_H Rated power Hi in LSB0...65535r120P_TYP_LSB_L Rated power Low in LSB0...65535rTable 9.8 Hardware parametersPNU Symbol Name Value range Combo-Opt Unit R / W Default 126SPG_MIN Mains voltage monitoring minimum0...1000 V V r / w320 V 127SPG_MAX Mains voltage monitoringmaximum0...1000 V V r / w480 V128UN_S Undercurrent monitoring0...1OFF, ON r / w OFF 130UE_S Overcurrent monitoring0...1OFF, ON r / w OFF 313REL_ABS Load break0...1REL_, ABS_r / w REL_ 311LASTBRUCH_MINUndercurrent monitoring value0..99 %%r / w0 %312LASTBRUCH_MAXOvercurrent monitoring value101...255 %%r / w0 %159LASTBRUCH_MIN_ABSUndercurrent monitoring value0...65535r / w0160LASTBRUCH_MAX_ABSOvercurrent monitoring value0...65535r / w0 Table 9.9 MonitoringPNU Symbol Name Value range Combo-Opt Unit R / W Default 0Power controller address 1...998r / w100 32Regulator suppressor0...1OFF, ON r / w0 302--Acknoledge through set to 10...1r / w303SAVE Save the settings by setting to 100.10r / w328--Ext. Error message0...1OFF, ON r / w OFF290--Real-time clock: Date: Year andmonth Low byte month,high byte yearr / w0291--Real-time clock: Date: Day andhour Low byte hour,high byte dayr / w0292--Real-time clock: Date: Minute andsecond Low byte second,high byte minuter / w0293UHR_WRITE_ENABLE Setting to 1 enables time to bechangedSetting to 0 adopts the timer / w0100IMAB_2Pulse switch-off on fault Error bits r / w0 101IMAB_1Pulse switch-off on fault Error bits r / w0 297DA_EN_2Data logger enable register Error bits r / w65535 298DA_EN_1Data logger enable register Error bits r / w65535 806--Version jear2000...r807--Version month 1..12r808--Version day 1..31rTable 9.10 MiscellaneousPNU Symbol Name Value range Combo-Opt Unit R / W Default 706--Actual value Peff in LSB L1 (HI)0...65535r707--Actual value Peff in LSB L10...65535r708--Actual value Peff in LSB L2 (HI)0...65535r709--Actual value Peff in LSB L2 (LOW)0...65535r710--Actual value Peff in LSB L3 (HI)0...65535r711--Actual value Peff in LSB L3 (LOW)0...65535r712--Actual value Peff in LSB total (HI)0...65535r0...65535r713--Actual value Peff in LSB total(LOW)700--Actual value Ieff in LSB L10...65535r701--Actual value Ieff in LSB L20...65535r702--Actual value Ieff in LSB L30...65535r703--Actual value Ueff in LSB L10...65535r704--Actual value Ueff in LSB L20...65535r705--Actual value Ueff in LSB L30...65535r784--Conductance in LSB L10...65535r785--Conductance in LSB L20...65535r786--Conductance in LSB L30...65535r771--Status LEDs & Relais0...255r787--Temperature0...65535r724--Period0...65535 µsµs rr732--Setpoint total0..100 %16383== 100%717--On-time value0...T0_MAX0.02 s r408--On-angle alpha0...180°el0.01°el rr / w15 94SW_ACTIV Setpoint activation0...15Bit 0 = 1 (Setpointt10 activ) ...r733--Setpoint terminal 100..100 %16383== 100%r734--Setpoint terminal 110..100 %16383== 100%722--Current fault register Error bits r65535 723--Current fault register Error bits r65535 731Setpoint master0..100 %16383r0== 100%r0 306--Setpoint mopo0..100 %16383== 100%718--Actual value voltage rectifier0...65535V r719--Actual value current rectifier0...65535A rTable 9.11 Actual values21。
Thyro-A说明书
---------------------------------------------------------------最新资料推荐------------------------------------------------------Thyro-A说明书-AEG可控硅电源调功器Thyro-A可控硅电源调功器- 可控硅电源调功器概述 - 控制方式 - 负载电路配置 - Thyro-A产品介绍 - 如何选择AEG可控硅电源调功器P11/ 60-AEG可控硅电源调功器可控硅电源调功器概述超过40年可控硅调功器历史 20年高性能调功器经验调功器解决方案:设计, 生产, 研发, 技术支持和应用P2---------------------------------------------------------------最新资料推荐------------------------------------------------------ -AEG可控硅电源调功器质量认证产品质量满足客户严格的质量要求Belecke Hainault Lannion Milano完全满足ISO9001质量体系Penang Toronto ToursSingaporeVitoriaZwanenburg产品设计和制造满足大多数国际安全标准Europe USA Canada GermanyP33/ 60-AEG可控硅电源调功器可控硅电源调功器温度传感器实际值温度控制器介质 0(4) - 20 mA 0(1) - 5 V 0(2) - 10 V?设定值PLC电加热 P I, I? U, U?加热元件变压器PC / PCS7 Thyro P 软件Thyro-P e.g. Thyro-PPower ControllerProfibus DP / Modbus R T U / 或者其他通过电位计调整设定值供电电源N L2L1P4---------------------------------------------------------------最新资料推荐------------------------------------------------------ -AEG可控硅电源调功器可控硅电源调功器电源调功器的用途可控硅电源调功器通常应用于以下工业流程:? 加热 ? 熔化 ? 干燥 ? 成型能非常精确地控制 - 电压、电流和功率;而且也能非常精确地设置、显示和输出及打印这些参数 - 电压、电流和功率。
[指南]AEG调功器参数设置指导
![[指南]AEG调功器参数设置指导](https://img.taocdn.com/s3/m/d7a68076dcccda38376baf1ffc4ffe473368fdcd.png)
AEG调功器参数设置指导
1.确认负载已经接入,确认上电前检查工作已经完成,确认已经按
照我写的调试大纲完成各项。
2.连接编程电缆(培训课程中已经讲到,如有疑问,联系我)
3.进入Thyro-Toolfamily。
(前提条件是安装该软件,培训完成后各
位已经有了软件,或则调功器随机的光盘里也有,再不行就联系我。
)
4.File-Open-Parameters选择对应PRC文件(铂金选500V,成型选
400V,电流对应你目前要设置的调功器型号的电流)
5.File-Transmit to完成后点击保存键。
6.通过调功器Fluse lock灯确认使能旋钮的功能。
7.旋动SS2至中档,确认KM吸合并红色报警灯亮。
8.点击软件中的LST键,出现输出设置列表。
9.输入20%,确认负载得到输出,并且绿色运行指示灯亮。
10.输入50%,确认负载得到输出。
11.SS2旋转至右档,检测柜门上的+ -按钮的功能。
12.点击软件最左侧的New Parameter View出现参数设置列表。
13.Limit-IEAM项对应value值设置成指导性文件里的电流值。
(成型
区改值*1.2输入调功器)
14.Limit=PAM项对应value值设置成指导性文件里的功率值。
(铂金
该值*1.2输入调功器)
15.System-chang power conteller address 输入指导性文件里的地址。
16.修改对应回路电流表的量程,具体设置值见指导性文件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AEG-Thyro-2A调功器安装说明〔中文说明书〕德国AEG 电源系统公司是世界著名的电源调功器生产商和供给商,其Thyro-S,-A,-P 系列调功器产品在全球电加热领域享有盛誉。
产品广泛使用在阻性、感性、变压器等负载,精度到达0.5%,具有ProfiBus-DP, ModBus RTU, DeviceNet , RS232, 4-20mA 等多种控制和通讯方式,具有自诊断功能,具有专利的ASM自动功率分配能,可以液晶显示,可以实现远程/就地控制的转换。
可控硅耐还击穿电压高,风冷情况下电流可达2900A,带有快熔和散热片。
4.安装及接线说明Thyro-2A*—Thyro-2A*可整合成VDE 0610用于工业用途—Thyro-2A*应该竖直安装与墙面的间隙应≥100mm与顶墙面的间隙应≥150mm设备下方不能有发热源—Thyro-2A*应安装在配电箱,以防人员误碰配电箱要保证有适当的通风—Thyro-2A*适用于枯燥的室环境部不能有污染及腐蚀性气体进入—Thyro-2A*应根据当地电气设备管理部门规定正确接地—Thyro-2A/5.88〕之间切断为了防止故障,应遵守下面的安装手册—如果可能,主电缆及控制电缆应分开布线—用短的绞接线〔防止缠绕〕—单元应正确接地注意:如果要翻开Thyro-2A*,在修理或维护前一定要确保设备已与所有的电源回路断开连接,如果做不到这样,只能由熟悉该设备并知道潜在风险的有资质的人员进展相关工作。
在紧急状态,脉冲锁不能用于平安停机。
例如在晶闸管发生短路时不能断开脉冲锁开关,对于变压器负载和控制横向控制和电源别离的,Thyro-2A*必须通过脉冲锁来进展释放,只有当电压用于电源系统时方可释放,这必须在电源无电压时进展设定。
半导体保险用于晶闸管短时的短路或过流进展保护,当轻微过载时并不立即动作,因此不适用于VDE调节规定的线路保护。
端子*1.3电子控制回路的保险2 A/tr提供了线路的保护功能。
5. 连接图Thyro-2A*的连接图注意:2A*...-28HF风扇连接请参见5.2章运行模式:TAKT负载:阻性负载—三角形接线—无中性线的星形接法变压器负载—一次侧:无中性线的星形接法〔推荐〕—二次侧:星形或三角形接法下游负载:—星形或三角形接法注意:K1:到VDE 0160 /5.88的隔离点2 A/tr保险提供线路的保护功能*3:故障信号继电器故障:1-3闭合5.2 风扇的连接〔2A*...-28HF〕电源控制器2A*..-28HF安装了风扇进展强制通风。
端子排*7用于风扇工作电源的连接,分开固定在风扇上。
电器在*3端子排〔端子1-3将闭合〕,同时LED灯"超温〞将点亮。
开关S15,功能为超温故障继电器可以设置如下:S15闭合:超温将启动故障报警继电器S15断开:超温将不启动故障报警继电器连接:5.3 输入设置的应用6. 调试Thyro-2A*的接线及调试必须由有资质的技术人员按照安规进展。
平安注意点:1. 比拟Thyro-2A*铭牌数据、电源供给、负载是否匹配。
2. 只在Thyro-2A*完全失电的情况下进展开关设置。
3. 检查单元的连接图与实际接线是否一致。
4. 中选择I2-电流控制或者P-功率控制,主和辅控制器最大的工作电流或工作功率应与电位计"电流-/功率限制〞相适应。
5. 当用户用到R W:R K≥2,Thyro-2A*应由脉冲锁来启动。
6.1 工作原理控制开关及电位计可让单元适用于不同的功能。
操作模式:S1 全波模式S2 变频模式S6/电位计"Traf-适应〞〔R25〕前半波相角调节,用于变压器负载控制特性:S9/S10 控制特性选择电位计"I-/P-限制〞〔R60〕设定最大工作电流〔I2-电流控制〕或最大功率〔P-功率控制〕负载回路监测:S11 非对称负载〕负载回路监测系统启动门槛的设置电位计"低-/过流〞〔100Thyro-2A* 监测系统S14 开/关Thyro-2A*监测系统超温监测系统〔仅 2A*..-280 HF〕S15 开/关超温报告到故障信号继电器输入设置S4 调整输入为0..20mA/0..5V(最大 24V)S5 由*一固定阶段控制启动电位计"零点〞〔R〕控制特性线,调整启动设置1电阻R5 调节电阻以调整电压设置最高至24V〔在连接支撑点〕单元-特性开关S3/S13 调整Thyro-2A*为主端子的分配*1 电子回路控制电压接线*2.1(-), 2:电子锁*2.3(-), 4: 设置输入*: SYT 9 同步连接*2.3(-), 6: 实际值输出*2.8 部5V输入*3 故障继电器输出*4 部CT连接*5 部接线6.2 设置图6.3 输入的设置输入电压、电流可通过S4接点进展匹配设置。
通过电位计"零点〞,可以全量程修改启动控制点。
除了这些可变设置特性,启动控制也可以使用S5开关,通过⊿S到达控制目的。
控制特性线由所选择的控制特性的最大值和主设定值,启动控制及停顿控制共同决定。
2. 通过电位计"零点〞进展起动控制〔主〕如果上述的起曲特性不能满足特殊要求,须进展前期校验,输入设置应选择将要被设置的特性。
两个工作状态〔参数〕应该有所变化:2a. 工作电流已建立把电位计向右调,只到工作电流恰好停顿,以设定电位计"零点〞2b. 无工作电流流过把电位计向左调,只到恰好有工作电流开场形成,以设定电位计"零点〞额定电流为130A/170A/280A,主工作元件的连接图移开盖子后,根据下表的定义对开关进展设定(见零电压工作操作规程)移开盖子后,根据下表的定义对开关进展设定(零电压工作操作条件) 从工作元件的连接图,电流30…110A。
额定电流为130A/170A/280A,从工作元件的连接图6.4 感性负载的应用Thyro-2A*厂家通过调节相位角〔90o围〕导通全波的前半周波以适应感性负载,因此感性负载在电流过零点时接通,涌流将触发整套半导体保险,应当设定相位夹角〔通过电位计"感性适应〞和一个示波器〕来最小化涌流。
当一个负载对称监视系统投用时,这个必要的,考虑单元接通时励磁涌流的反任用,电位计"感性适应〞L1和L3应分别设定。
感性负载时的开关位置:S1:位置1S2:合S3:合6.5 Thyro-2A*监控系统的设定Thyro-2A*监控系统可按如下设定:Thyro-2A* 监控系统启用,S14:合Thyro-2A* 监控系统投退,S14:分6.6 控制特性的设定根据不同的情况,Thyro-2A* 具有如下的控制特性:—I2电流控制—U2电压控制—P 功率控制设定控制特性实际值由实际输出端子排*2.3-6给定,显示值参考:—最大工作电流〔I2电流控制〕—最大过电压〔U2电压控制〕—最大工作功率〔P 功率控制〕6.6.1 I2电流控制I2电流控制用于非连续性工作的阻性加热元件R W/R K,这种情况下,最大的工作功率不是最重要的。
电流控制需要Thyro-2A*适应最大的工作电流,否则小的设定值甚至不能实现全调节。
最大的工作电流定义为:R W热态时,电阻R W/R K< >1,全调节时的电流。
注意:最大工作电流必至少为Thyro-2A*额定电流的25%。
1. 通过电源及负载计算最大的有效工作电流。
2. 开关位置〔主/从控制器〕S9:位置2S10:位置13. 设定电位计"I/P—限制〞来计算刻度值:刻度值=10*最大工作电流额定电流厂家设定=右侧停顿案例:Thyro-2A* 型号 2A* 400-30HThyro-2A* 额定电流= 20A最大工作电流= 11A刻度值=10*A A 3011刻度值= 6个刻度等级运行过程中,Thyro-2A*工作在最大电流限值下。
注意:运行过程中,能检查设定值,最大的工作电流必须流过100%的设定值,必要时,需要校正"I/P 限制〞电位计。
6.6.2 小工作电流的应用Thyro-2A*单元工作电流从30A 到110A ,它也能工作在25%额定电流下,实现完整的控制特性。
要实现此功能,桥插头必须位于正确的位置〔跳线板*8/*9/*10〕。
警告:不要用跳线来提搞单元电流,跳线只能单向向跳线板边缘侧移出。
6.6.3 U 2电压控制U 2电压控制用于不受时间影响的加热元件,例如恒电阻〔R W /R K =1〕或者符合德国工业标准DIN 17470/17471的热元件。
电源电压的波动被直接抵消到达平衡了。
电压控制不需要特别的负载适应,电压控制设计用来实现对100%设定和电源电压的全控制。
开关位置:S9: 位置1S10: 位置26.6.4 P 功率控制功率控制用于连续性超温/超时的热元件,也就是与温度非正比关系的加热器,如石墨或者SiC 。
功率控制需要Thyro-2A*在必须的电源上实现全控制,应采用恒定的电源。
注意:最大的工作功率应当至少为25%Thyro-2A*的额定功率。
1. 通过电源及负载计算最大的工作功率。
2. 开关位置:S9:位置2S10:位置23. 设定电位计"I/P 限制〞〔主/从控制器〕,直接计算刻度值:刻度值=10*的额定功率最大的工作功率AX Thyro 2 案例:Thyro-2A* 型号 2A* 400-30HThyro-2A* 额定功率= 21kVA最大工作功率= 12.5kVA刻度值=10*21kVA 12.5kVA刻度值= 6个刻度等级运行过程中,Thyro-2A*工作在最大功率限值下。
一旦相L1或者L3发生故障,将会把故障传递至其它相。
注意:运行过程中,能检查设定值,最大的工作功率必须流过100%的设定值,必要时,需要校正"I/P 限制〞电位计。
6.7 负载回路监测系统的设定负载回路监测系统的使用保证了负载对称及每相最多5个并联负载的监测,负载回路监测系统不能切断,但它可以简化为全部断开时信号报警,它是通过调节从控制器"过/低电流〞电位计到底直到听到一声嘀嗒声来实现的。
负载回路监测系统由厂家进展设定,这样当回路电阻改变造成电流变化超过额定电流30%时发出报警信号。
假设最大的工作电流低于额定电流,则厂家设定值的灵敏度将降低,因此这种情况下也要适用。
1. 根据电源及负荷数据,计算最大的工作电流。
2. 设定将被监测的阻性负荷的变化值⊿R 。
3. 根据阻性负荷在星形或角形连接时电阻变化值⊿R 设定不平衡系数KA 。
4. 设定电位计,通过调节UmR 电位计"低/过流〞〔从控制器〕 UmR=KA 额定电流最大工作电流AX Thyro 2 5. 确认S11位置〔主控制器〕S11:位置06. 把"低/过流〞电位计调〔从控制器〕左向调到底〔听到声音〕,然后向右旋转到计算UmR 位置。