永磁同步电机与转子磁场定向矢量控制
永磁同步电机的矢量控制系统
永磁同步电机的矢量控制系统一、本文概述随着科技的不断进步和工业的快速发展,电机作为核心动力设备,在各种机械设备和工业自动化系统中扮演着至关重要的角色。
其中,永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)因其高效率、高功率密度和优良的控制性能等优点,被广泛应用于电动汽车、风力发电、机床设备等领域。
为了实现永磁同步电机的精确控制,提高其运行效率和稳定性,矢量控制(Vector Control)技术被引入到永磁同步电机的控制系统中。
本文将对永磁同步电机的矢量控制系统进行深入探讨。
文章将简要介绍永磁同步电机的基本结构和运行原理,为后续的矢量控制理论奠定基础。
接着,文章将重点阐述矢量控制的基本原理和实现方法,包括坐标变换、空间矢量脉宽调制(SVPWM)等关键技术。
文章还将分析矢量控制系统中的传感器选择、参数辨识以及控制策略优化等问题,以提高系统的控制精度和鲁棒性。
通过本文的研究,读者可以对永磁同步电机的矢量控制系统有一个全面而深入的了解,为实际应用中提高永磁同步电机的控制性能提供理论支持和指导。
本文还将探讨未来永磁同步电机矢量控制系统的发展趋势和挑战,为相关领域的研究者和工程师提供有价值的参考信息。
二、永磁同步电机的基本原理永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种高效、高性能的电机类型,其工作原理基于电磁感应和磁场相互作用。
PMSM的核心组成部分包括定子、转子和永磁体。
定子通常由三相绕组构成,负责产生旋转磁场;转子则装有永磁体,这些永磁体在定子产生的旋转磁场作用下,产生转矩从而驱动电机旋转。
PMSM的工作原理可以简要概括为:当定子三相绕组通入三相交流电时,会在定子内部形成旋转磁场。
由于转子上的永磁体具有固定的磁极,它们在旋转磁场的作用下会受到力矩的作用,从而使转子跟随定子磁场的旋转而旋转。
通过控制定子电流的相位和幅值,可以精确控制旋转磁场的转速和转向,从而实现对PMSM的精确控制。
永磁同步电机矢量控制发展综述
永磁同步电机矢量控制发展综述
永磁同步电机矢量控制是一种高效、精确的电机控制技术,近年来得到了广泛的应用和发展。
本文将从永磁同步电机的基本原理、矢量控制的基本思想、发展历程和应用前景等方面进行综述。
永磁同步电机是一种具有高效、高功率密度、高精度和高可靠性的电机,其基本原理是利用永磁体产生的磁场与电流产生的磁场相互作用,从而实现电机的转动。
与传统的感应电机相比,永磁同步电机具有更高的效率和更低的损耗,因此在工业、交通、航空等领域得到了广泛的应用。
矢量控制是一种基于电机磁场矢量的控制技术,其基本思想是将电机的磁场分解为定子坐标系和转子坐标系两个矢量,通过控制这两个矢量的大小和方向,实现电机的转速和转矩控制。
矢量控制技术可以有效地提高电机的响应速度和控制精度,因此在永磁同步电机控制中得到了广泛的应用。
永磁同步电机矢量控制技术的发展历程可以追溯到上世纪80年代,当时主要应用于高端工业领域。
随着电力电子技术和数字控制技术的不断发展,永磁同步电机矢量控制技术得到了进一步的提升和完善。
目前,永磁同步电机矢量控制技术已经成为电机控制领域的主流技术之一,广泛应用于电动汽车、风力发电、轨道交通等领域。
未来,永磁同步电机矢量控制技术将继续发展和完善,主要体现在
以下几个方面:一是提高控制精度和响应速度,以满足更高的工业和交通应用需求;二是降低成本和提高可靠性,以促进技术的普及和应用;三是结合人工智能和大数据技术,实现电机的智能化控制和优化运行。
总之,永磁同步电机矢量控制技术的发展前景广阔,将为人类社会的可持续发展做出更大的贡献。
永磁同步电机矢量控制
永磁同步电机矢量控制1 引言永磁同步电机(PMSM)体积小,重量轻,转子无发热问题,具有损耗低、电气时间常数小、响应快等特点,因此在高控制精度与高可靠性等方面显示出优越的性能,永磁同步电动机调速系统正在成为近代交流调速领域中研究的一个热门课题。
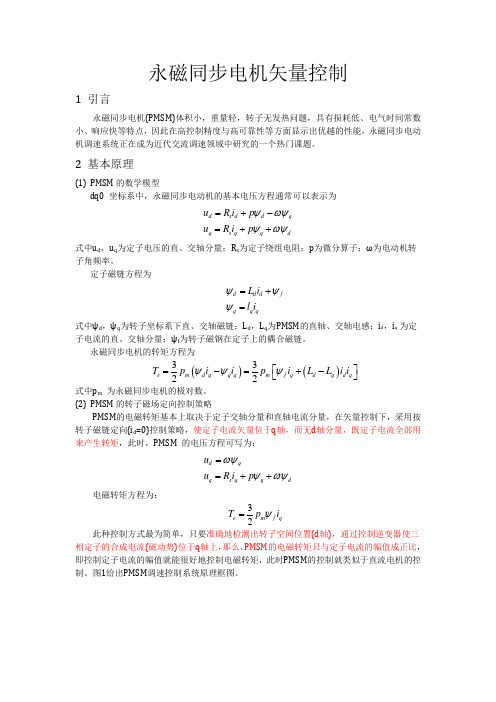
2 基本原理(1) PMSM 的数学模型dq0 坐标系中,永磁同步电动机的基本电压方程通常可以表示为d s d d q q s q q du R i p u R i p ψωψψωψ=+-=++式中u d ,u q 为定子电压的直、交轴分量;R s 为定子绕组电阻;p 为微分算子;ω为电动机转子角频率。
定子磁链方程为d d d f q q qL i l i ψψψ=+=式中ψd ,ψq 为转子坐标系下直、交轴磁链;L d ,L q 为PMSM 的直轴、交轴电感;i d ,i q 为定子电流的直、交轴分量;ψf 为转子磁钢在定子上的耦合磁链。
永磁同步电机的转矩方程为()()3322e m d q q q mf q d q d q T p i i p i L L i i ψψψ⎡⎤=-=+-⎣⎦ 式中p m 为永磁同步电机的极对数。
(2) PMSM 的转子磁场定向控制策略PMSM 的电磁转矩基本上取决于定子交轴分量和直轴电流分量,在矢量控制下,采用按转子磁链定向(i d =0)控制策略,使定子电流矢量位于q 轴,而无d 轴分量,既定子电流全部用来产生转矩,此时,PMSM 的电压方程可写为:d qq s q q du u R i p ωψψωψ==++电磁转矩方程为:32e mf q T p i ψ=此种控制方式最为简单,只要准确地检测出转子空间位置(d 轴),通过控制逆变器使三相定子的合成电流(磁动势)位于q 轴上,那么,PMSM 的电磁转矩只与定子电流的幅值成正比,即控制定子电流的幅值就能很好地控制电磁转矩,此时PMSM 的控制就类似于直流电机的控制。
图1给出PMSM 调速控制系统原理框图。
永磁同步电机矢量控制

永磁同步电机矢量控制在交流传动系统中,为了实现高精度、高动态性能的速度和位置控制,通常采用磁场定向矢量控制或直接转矩控制。
无论采取哪种控制方案,都需要测量转子的位置和速度,这一般是通过传感器(旋转变压器、编码器、解算器和测速发电机)来实现。
但是,这类传感器有安装、电缆连接、故障等问题,降低了系统的可靠性,特别是在高速、超高速传动控制中,机械式传感器实现困难,更有结构、价格等问题,这都限制了其应用范围。
为了解决机械传感器带来的各种缺陷,许多学者开展了无传感器控制技术的研究,其主要思想是利用电机绕组中的有关电信号,通过适当的方法估算出转子的位置和转速,实现转子位置的自检测。
在各种转子位置和速度的检测方法中大多数都是通过检测基波反电势来获得转子的位置信息[1-3]。
这种基于基波激励的方法虽然实施简单,但在零速或低速时会因反电势过小或根本无法检测而失败,故多只适用于高转速运行。
另外,由于这些方法要利用基波电压和电流信号来计算转子位置和速度,因此对电机参数变化很敏感,鲁棒性差。
为了在包括零速在内所有速度下都能获得精确的转子位置信息,一些文献提出了转子凸极追踪法[4-6]。
这种方法要求电机具有一定程度的凸极性,而且需注入持续高频激励。
由于这种方法追踪的是电机转子的空间凸极效应,因此对电机参数的变化不敏感,鲁棒性好。
高频信号注入法的基本原理是在电机中注入特定的高频电压(电流)信号,然后检测电机中对应的电流(电压)信号以确定转子的凸极位置。
但这些转子位置估计方法活或多或少存在以下问题:无法确定转子初始位置;低速段精度较差;过于依赖电机参数;算法复杂、计算量大,需要高速运算处理器,实现困难,效果也不尽人意。
本文提出了一种新型的转子位置检测方法,在定子绕组的适当位置安装一个锁定型霍尔传感器。
通过适当的处理,可以提取转子位置信号和转速信号。
该方法简单易行,在转速稳定时精度高,检测到的转子位置信号误差小,并且每一个机械角度都可以对误差量进行修正,减少累计误差,保证测量精度。
永磁同步电动机矢量控制

永磁同步电动机矢量控制永磁同步电动机是一种新型的高性能电机,具有高效率、高功率密度、高转矩密度等特点,在工业和交通领域有广泛应用。
矢量控制是一种高级的控制方法,可以实现电机的高精度运行和性能优化。
本文将介绍永磁同步电动机矢量控制的结构和方法。
永磁同步电动机的结构包括永磁转子、定子绕组和控制器等几个部分。
永磁转子由永磁体和转子绕组组成,永磁体产生一个恒定的磁场,而转子绕组用于传导电流。
定子绕组是通过变频器提供的三相电流激励,产生旋转磁场。
控制器则根据电机的位置、速度和负载要求等信息,调节电机的电流和控制策略,实现对电机的控制。
永磁同步电动机的矢量控制方法主要包括电流控制、转子磁链观测、速度和位置估算等几个步骤。
电流控制是通过控制器提供的电流指令,调节电机的电流大小和相位,使电机的磁场与转子磁场同步,实现最大力矩输出。
转子磁链观测则通过计算电机的电流与磁场之间的关系,实时估算转子的磁链大小和位置,用于后续的控制。
速度和位置估算则是通过测量电机的转子位置和速度,采用信号处理和滤波算法,推算出电机的实际运行状态,用于控制器的反馈。
在矢量控制中,还可以应用一些高级控制技术,如预测控制、自适应控制和模型预测控制等,以进一步提高电机的性能和动态响应。
预测控制通过模型预测电机的状态和负载要求,优化控制策略,实现最佳性能。
自适应控制则是通过实时调节控制器的参数,使控制器能够适应电机的变化,提高控制性能。
模型预测控制则是通过建立电机的动态数学模型,预测未来一段时间的状态和输出,以实现最佳的控制性能。
综上所述,永磁同步电动机矢量控制是一种高级的电机控制方法,能够实现对电机的高精度控制和性能优化。
通过控制电机的电流和磁场,在不同的工况下实现最大力矩输出和高效能运行。
未来,随着控制算法和硬件技术的不断发展,永磁同步电动机矢量控制在各个领域将有更广泛的应用。
永磁同步电机与转子磁场定向矢量控制
12 伺服系统概述
5. PMSM的矢量控制
由永磁同步电机在转子坐标系的转矩方程可知,转矩由两项组 成,第一项是由三相旋转磁场和永磁磁场相互作用所产生的电磁转 矩,与交轴电流iq成正比;第二项是由凸极效应引起的磁阻转矩,它 是由d、q 轴同步电感的不同造成的,且与d、q 轴电流的乘积成正 比。对于嵌入式永磁同步电机,一般Lq > Ld ;对于凸装式转子结构 的永磁同步电机,转子磁路对称Lq = Ld ,磁阻转矩为零。
12 伺服系统概述
为了使得永磁同步电动机具有正弦波感应电动势波形,其转子磁钢形 状呈抛物线状,使其气隙中产生的磁通密度尽量呈正弦分布。定子电枢采 用短距分布式绕组,能最大限度地消除谐波磁动势。
图1-2 旋转磁动势波形图
12 伺服系统概述
2. 永磁同步电机的优势与应用
2.1 永磁同步电动机的优势
我国电动机保有量大,消耗电能大,设备老化,效率较低。永 磁同步电动机(PMSM)具有体积小、效率高、功率因数高、起动力矩 大、力能指标好、温升低等特点。
12 伺服系统概述
永磁同步电机的定子与普通电励磁同步电机的定子一样有 三相对称绕组,转子上安装有永磁体,定子和转子通过气隙磁 场存在电磁耦合关系。 永磁同步电机的定子磁链是由定子三相绕组电流和转子永 磁极产生,定子三相绕组电流产生的磁链与转子位置角有关, 转子永磁极产生的磁链也与转子位置有关,转子永磁极在每相 绕组中产生反电势。
2015年6月24日,历时11年,累计1000万次试验,积累150G数据, 耗资1亿元,中国中车旗下株洲电力机车研究所有限公司攻克了第三 代轨道交通牵引技术,即永磁同步电机牵引系统,掌握完全自主知 识产权,成为中国高铁制胜市场的一大战略利器。
12 伺服系统概述
永磁同步电机的控制方法
永磁同步电机的控制方法
永磁同步电机是一种常见的电动机型号,具有高效、能耗低等优点,在不少领域广泛应用,如空调、洗衣机、汽车等。
为了使电机工作更加稳定、可靠,需要对其进行控制,本文将介绍几种常见的永磁同步电机控制方法。
一、矢量控制方法
矢量控制方法也称为矢量调速,是对永磁同步电机进行控制的一种较为复杂的方法。
通过对电机的磁场和电流进行精细控制,可以实现电机速度和转矩的精准调节。
具体实现时,需要提取电机转子位置,进行磁场定向控制。
二、直接转矩控制方法
直接转矩控制方法是对电机电流进行直接调节的方法,可以实现对电机转矩的调节。
该方法操作简单,但控制效果较为粗糙,容易造成电机振动和噪音。
三、电压向量控制方法
电压向量控制方法通过调节电机的电压和相位,控制电机的速度和转矩。
该方法比直接转矩控制方法更加精准,但控制难度较大,计算量较大。
四、滑模控制方法
滑模控制方法是近年来发展的一种新型控制方法,可以实现低成本、高效率的电机控制。
该方法借助滑模变量实现对电机转速和转矩的控制,具有控制精度高、响应速度快等优点。
五、解析控制方法
解析控制方法也是近年来发展的一种新型控制方法,该方法是通过解
析电机的动态特性,设计控制器实现对电机的精准控制。
该方法适用于大功率电机控制,但计算量较大,难度较高。
以上是几种常见的永磁同步电机控制方法,不同的方法具有不同的特点和适用范围,需要根据实际情况选择合适的控制方法。
随着科技进步和工业发展,永磁同步电机控制技术也将不断进步和发展。
永磁同步电机控制原理
永磁同步电机控制原理位置控制是指将电机转子的位置控制在给定的位置上,常用的方法有传统的电流环控制和矢量控制。
传统的电流环控制是通过控制电机的电流来实现位置控制。
首先,测量电机的转子位置,通常使用光电编码器或霍尔传感器。
然后,通过闭环控制系统计算得到合适的电流指令。
最后,将电流指令发送到电机驱动器,控制电机的电流。
该方法的优点是简单且稳定,但低效。
矢量控制是一种较为先进的方法,可以实现更高的转速和更高的效率。
矢量控制通过直接控制电机的转子位置和转矩来实现位置控制。
矢量控制的原理是将电机的转子电流和磁场定向地控制在给定的位置上。
为了实现矢量控制,需要测量电机的转子位置和转速,并通过采样和滤波等技术对其进行处理。
然后,通过矢量控制算法计算得到合适的电流指令,并将其发送到电机驱动器。
电机驱动器会根据电流指令调整电机的相电流,从而控制电机的转子位置和转矩。
除了位置控制,永磁同步电机的控制还包括转速控制和转矩控制。
转速控制是指将电机的转速控制在给定的范围内。
常用的方法有开环控制和闭环控制。
开环控制是指根据电机驱动信号的占空比和频率来控制电机转速。
通过改变驱动信号的占空比和频率可以改变电机的转速。
该方法简单易实现,但不稳定且精度较低。
闭环控制是指在电机的转子位置和速度反馈信号的基础上,通过PID控制器或其他控制算法,计算得到合适的电压指令,并将其发送到电机驱动器。
电机驱动器会根据电压指令调整电机的相电压,从而控制电机的转速。
转矩控制是指将电机的输出转矩控制在给定的范围内。
常用的方法有矢量控制和直接转矩控制。
矢量控制是指在电机的转子位置、速度和转矩反馈信号的基础上,通过矢量控制算法计算得到合适的电流指令,并将其发送到电机驱动器。
电机驱动器会根据电流指令调整电机的相电流,从而控制电机的转矩。
直接转矩控制是指通过测量电机输出转矩并在闭环控制系统中计算得到合适的电流指令,并将其发送到电机驱动器。
电机驱动器会根据电流指令调整电机的相电流,从而控制电机的转矩。
永磁同步电机的矢量控制策略的研究和实现

主要内容
? 基于永磁同步电机动态数学模型的控制策略 ? PMSM 电机的 FOC 控制策略 ? 后续的工作
2/19
一.永磁同步电机动态数学模型的控制策略
? 电动机是电能与机械能转换的能量载体,电气传 动控制技术则通过电压、电流、频率等电气量, 实现速度、转矩、角度、位移等机械量的控制、 使得生产机械按照人们期望的方式运行。
(L ?
M
)
??iB
? ?
?
?
r ??cos(?
? 120 ?)??
??? C ??
??iC ??
电压方程可表示为
??cos(? ? 120?)??
转子电角速度
可表示为 ?uA ?
??uB
? ?
??uC ??
?
?iA ?
Rs
??i
B
? ?
?
??iC ??
(L ?
M)
d dt
?iA ?
??iB
? ?
?
?
??iC ??
r?
? sin? ?
r ??sin (?
?
120
?)
? ?
??sin (? ? 120 ?)??
?
r
?
d?
dt
?
6/19
电磁转矩方程可表示为
Te ? np? r (iAsin? ? iBsin(? ? 120?) ? iCsin(? ? 120?))
根据永磁同步电机在三相静止坐标系下的数 学模型公式可以看出,许多电机参数和转子位置 角度有关,而其是时变系数,所以此时系统是非 线性的。由于非线性系统的复杂性,利用坐标变 换原理简化永磁同步电机的数学模型。根据坐标 变换原理,可建立永磁同步电机在两相旋转坐标 系下的数学模型。
永磁同步电动机矢量控制模型的设计与仿真
永磁同步电动机矢量控制模型的设计与仿真交流调速理论包括矢量控制和直接转矩控制。
1971年,由F.Blaschke 提出的矢量控制理论第一次使交流电机控制理论获得了质的飞跃。
矢量控制采用了矢量变换的方法,通过把交流电机的磁通与转矩的控制解耦使交流电机的控制类似于直流电动机。
矢量控制方法在实现过程中需要复杂的坐标变换,而且对电机的参数依赖性较大。
直接转矩控制是1985年Depenbrock教授在研究异步电机控制方法时提出的。
该方法是在定子坐标系下分析交流电机的数学模型,强调对电机的转矩进行直接控制,对转矩进行砰一砰控制,无需解耦,省掉了矢量旋转变换计算。
控制定子磁链而不是转子磁链,不受转子参数变化的影响,但不可避免地产生转矩脉动,低速性能较差,调速范围受到限制。
而且由于它对实时性要求高、计算量大,对控制系统微处理器的性能要求也较高。
矢量控制的基本思想是在普通的三相交流电动机上设法模拟直流电动机转矩控制的规律,在磁场定向坐标上,将电流矢量分解成为产生磁通的励磁电流分量和产生转矩的转矩电流分量,并使得两个分量互相垂直,彼此独立,然后分别进行调节。
这样交流电动机的转矩控制,从原理和特性上就和直流电动机相似了。
控制策略的选择上是PID控制,传统的数字PID控制是一种技术成熟、应用最为广泛的控制算法,其结构简单,调节方便。
1 永磁同步电机的数学模型1.1 永磁同步电机系统的结构永磁同步电机的基本组成:定子绕组、转子、机体。
定子绕组通过三相交流电,产生与电源频率同步的旋转磁场。
转子是用永磁材料做成的永磁体,它在定子绕组产生的旋转磁场的作用下,开始旋转。
1.2 坐标变换坐标变换,从数学角度看,就是将方程中原来的一组变量,用一组新的变量来代替。
线性变换是指这种新旧变量之间存在线性关系。
电动机中用到的坐标变换都是线性变换。
在永磁同步电机中存在两种坐标系,一种是固定在定子上的它相对我们是静止的,即:α,β 坐标系,它的方向和定子三相绕组的位置相对固定,它的方向定位于定子绕组 A 相的产生磁势的方向,另一种是固定在转子上的旋转坐标系,我们通常称之为 d,q 坐标,其中 d 轴跟单磁极的 N 极方向相同,即和磁力线的方向相同,q 轴超前 d 轴 90 度下图所示。
永磁同步电机两种磁场定向控制策略的比较

2.1 矢量控制 FOC[2]
控制定子磁链的幅值和旋转方向。而定子电压矢量
在 d,q 坐标系中,PMSM 电压方程通常表示为:
!# ud=Rsid+Ld
did dt
- !"q
" $# uq=Rsiq+Lq
diq dt
+!"d
(1)
式中 ud,uq— ——定子电压 d,q 轴分量
id,iq—— —定子电流 d,q 轴分量
1引言
永磁同步电机(PMSM)有很多优点[1],如转矩纹 波系数小、动态响应快、运行平稳、过载能力强,很适 合在负载转矩变化较大的情况下使用;功率因数高, 长期使用节能效果明显,等等。因此,它在交流传动 领域的应用非常广泛,对其高性能控制策略的研究 也成为众多学者关注的焦点。
近几十年,为了满足工业发展对传动控制技术 的需要,高性能的交流传动控制策略不断出现,其 中 , 最 具 代 表 性 的 就 是 矢 量 控 制(Field-Oriented Control,简称 FOC)和直接转矩控制(Direct Torque Control,简称 DTC)。FOC 基于转子磁场定向,而 DTC 基于定子磁场定向。虽然这两种控制策略的控 制规则不同,但其最终目标是相同的,即无论电机或 负载参数及外界扰动如何变化,通过对电机转矩和
(Hangzhou Dianzi University,Hangzhou 310018,China) Abstr act: The theories of Field-Oriented Control(FOC)and Direct Torque Control(DTC)for permanent magnet synchronous motor(PMSM) are analyzed in brief.FOC is based on rotator field-oriented and the idea of decoupling.The motor current is decoupled into torque and magnetized current and dividually controlled for high performance.DTC is based on stator field-oriented and its controlling object is torque.The idea of DTC can be expressed as:observing torque and flux linkage,with Bang-Bang controller and switching table,controlling the state of power inverter,outputting proper voltage space vector,then realizing control of torque and flux linkage.An experimental system based on TMS320LF2407A and intelligent power module(IPM)is set up.Primary experiments are carried out for these two theories.The results of experiments showed that DTC has the same dynamic response as FOC,but the ripples of current and torque are so obvious. Keywor ds: permanent magnet motor;field-oriented control;torque control
永磁同步电机if电机控制算法
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)是一种常见的交流电机,其转子上装有永磁体,因此具有高效率、高功率密度和高转矩密度等优点。
在 PMSM 的控制中,常使用的算法是矢量控制(Vector Control)和直接转矩控制(Direct Torque Control,DTC)。
矢量控制是一种基于转子磁场定向的控制方法,它将电机的电流分解为励磁电流和转矩电流,并通过控制这两个电流分量来实现对电机转矩和速度的控制。
矢量控制算法需要对电机的参数进行精确测量和建模,因此对控制器的计算能力和传感器的精度要求较高。
直接转矩控制是一种直接控制电机转矩的方法,它通过测量电机的定子电压和电流,计算出电机的转矩和磁链,并通过控制定子电压和电流来实现对电机转矩的控制。
直接转矩控制算法不需要对电机的参数进行精确测量和建模,因此对控制器的计算能力和传感器的精度要求较低,但其控制精度和动态性能相对较差。
在实际应用中,矢量控制和直接转矩控制算法都有其优缺点,需要根据具体的应用场景和要求选择合适的算法。
此外,还有一些其他的控制算法,如模糊控制、神经网络控制等,也被应用于 PMSM 的控制中。
永磁同步电机矢量控制

最后,可将式(3-13)表示为
此式为定子电压矢量方程。
us
Rs is
Ls
dis dt
jωr ψ f
(3-16)
16
可将其表示为等效电路形式,如图 3-8 所示。图中, e0 jωrψf ,为感应 电动势矢量。在正弦稳态下,因 is 幅
值恒定,则有 Ls
dis dt
jωs Lsis ,于是式
(3-16)可表示为
但有一基本原则,即除了考虑成本、制造和可靠运行外,应尽量产生正弦分 布的励磁磁场。
3
图 3-4 和图 3-5 分别是二极面装式和插入式 PMSM 的结构简图。图中,标出了 每相绕组电压和电流的正方向,并取两者正方向一致(电动机原则),电压和电流可 为任意波形和任意瞬时值;将正向电流流经一相绕组产生的正弦波磁动势的轴线定义 为相绕组的轴线,并将 A 轴作为 ABC 轴系的空间参考坐标,同样可以将三相绕组表 示为位于 ABC 轴上的线圈;假定相绕组中感应电动势的正方向与电流的正方向相反 (电动机原则);取逆时针方向为转速和电磁转矩的正方向,负载转矩正方向与此相反。
2
PMSM 的转子结构,按永磁体安装形式分类,有面装式、插入式和内装式三 种,如图 3-1、图 3-2 和图 3-3 所示。
图 3-1 面装式转子结构
图 3-2 插入式转子结构
图 3-3 内装式转子结构
对于每种类型转子结构,永磁体的形状和转子的结构形式,根据永磁材料的 类别和设计要求的不同,可以有多种的选择,可采取各式各样的设计方案。
5
a) 转子等效励磁绕组
b) 物理模型
图3-6 二极面装式PMSM物理模型
6
如图 3-6a 所示,由于永磁体内部的磁导率接近于空气,因此对于定 子三相绕组产生的电枢磁动势而言,电动机气隙是均匀的,气隙长度为 g。于是,图 3-6b 相当于将面装式 PMSM 等效为了一台电励磁三相隐极 同步电动机,惟一的差别是电励磁同步电动机的转子励磁磁场可以调节, 而面装式 PMSM 的永磁励磁磁场不可调节。在电动机运行中,若不计及 温度变化对永磁体供磁能力的影响,可认为 f 是恒定的,即 if 是个常值。
永磁电机的矢量控制技术应用

永磁电机的矢量控制技术应用一、矢量控制技术的基本原理矢量控制技术是一种基于矢量分析的电机控制方法,其基本原理是将电机的电流和磁通分解为直流分量和交流分量,然后通过控制这些分量的大小和相位来实现对电机的精确控制。
具体来说,矢量控制技术可以分为磁链定向控制和转子定向控制两种方式。
磁链定向控制是通过控制电机的定子电流和磁场方向来实现对电机的控制,主要应用于感应电机和永磁同步电机。
而转子定向控制则是通过控制电机的转子电流和磁场方向来实现对电机的控制,主要应用于永磁同步电机和永磁直流电机。
无论是磁链定向控制还是转子定向控制,其基本原理都是在保持电机定子电流和转子电流的大小和相位恒定的情况下,通过控制电机的磁通方向和大小来实现对电机的精确控制。
二、永磁电机的特点永磁电机是一种以永磁体作为励磁源的电机,具有磁通密度高、磁场强度大、磁场稳定等特点,因此在工作时具有高效、高性能、轻巧、体积小等优点,广泛应用于各种领域。
相比之下,传统的感应电机和异步电机则需要外部提供励磁电流来产生磁场,因此在工作时效率较低,且需要大量的绕组和冷却设备,体积较大,因此在一些对体积和效率要求较高的场合往往难以满足要求。
永磁电机的磁场是恒定的,不需要外部提供励磁电流,因此具有自励磁性和无需外部提供磁场激励的特点,可以在较宽的转速范围内保持高效工作。
永磁电机的磁场也可以通过外部的控制来实现对电机的精确调节,因此在矢量控制技术中得到了广泛的应用。
矢量控制技术在永磁电机中的应用主要体现在以下几个方面:1.提高电机的动态响应特性。
矢量控制技术可以通过精确控制电机的电流和磁通方向来实现对电机的精确控制,提高了电机的动态响应特性,使电机能够更加快速、精确地响应外部控制信号,满足各种复杂工况下的控制要求。
2.提高电机的效率和功率密度。
永磁电机的磁场稳定、磁通密度高等特点使其在工作时能够实现高效工作,矢量控制技术可以进一步提高电机的效率和功率密度,使其在相同功率输出下体积更小、重量更轻。
永磁电机的矢量控制技术应用

永磁电机的矢量控制技术应用
矢量控制技术是一种先进的电机电力控制技术,已经广泛应用于永磁电机控制系统中。
该技术能够通过控制永磁电机的电流、电压和转速等参数来达到更高的效率、更低的噪音、更高的可控性和更稳定的性能。
本文将介绍永磁电机的矢量控制技术应用。
一、矢量控制技术介绍
矢量控制技术根据电机转子定子间的磁场关系(即旋转磁场理论),将电机控制分解
为电流控制和转矩控制两个环节。
其主要特点有:
1.能够实现电机高效、低噪音的控制;
2.能够协调各个机械负载的变化,增加电机的可控性;
3.能够使电机具有更加稳定的性能,如启动、加速、制动和反转等。
二、永磁电机的特点
永磁电机是一种依靠永磁体产生磁场的电机,具有高效、低噪音、高转矩、小体积、
轻质化等优点。
其特点有:
1.高转矩密度,适合高性能应用场合;
2.因为永磁体产生的磁场非常稳定,所以控制系统非常简单;
3.动态响应快,控制精度高,适合高精度应用场合。
永磁电机的矢量控制技术主要应用于工业生产中的各种机器设备、电动车辆、家电等
领域。
其应用包括:
1.工业生产中的各种机械设备,如机床、冷却水泵、风机等,可以通过矢量控制技术
实现更高的效率、更小的噪音和更高的可控性。
2.电动车辆中,通过永磁电机的矢量控制技术,可以实现电机更高的能量利用率和低
噪音的性能。
3.家电中,永磁电机的矢量控制技术可以使家电的性能更稳定、更高效、更低噪音,
如室内空调中的风机、洗衣机中的电机等。
四、结论。
永磁同步电机矢量控制原理公式。

永磁同步电机矢量控制原理公式。
全文共四篇示例,供读者参考第一篇示例:永磁同步电机矢量控制是一种先进的控制技术,通过对电机的电流和转子位置进行精确控制,实现电机的高性能运行。
在这种控制方法中,需要根据电机的数学模型来建立控制算法,其中最关键的是磁链方程、定子电压方程和永磁同步电机的运动方程。
下面我们就来详细介绍永磁同步电机矢量控制的原理及相关公式。
一、永磁同步电机的数学模型永磁同步电机是一种具有永磁体的同步电机,其主要结构包括定子和转子。
在永磁同步电机的数学模型中,通常采用dq轴坐标系描述电机的状态。
d轴与永磁磁场方向一致,q轴与d轴垂直。
永磁同步电机的磁链方程可表示为:\[\psi_d = L_d i_d + \psi_{fd}\]\[\psi_q = L_q i_q\]\(\psi_d\)和\(\psi_q\)分别为d轴和q轴的磁链,\(i_d\)和\(i_q\)分别为d轴和q轴的电流,\(L_d\)和\(L_q\)分别为d轴和q轴的电感,\(\psi_{fd}\)为永磁体的磁链。
定子电压方程可表示为:\(u_d\)和\(u_q\)分别为d轴和q轴的定子电压,\(R\)为定子电阻,\(\omega_{e}\)为电机的电角速度。
永磁同步电机的运动方程可表示为:\(T_e\)为电机的电磁转矩,\(P\)为电机的极对数。
二、永磁同步电机矢量控制原理1. 测量电机的dq轴电流和转子位置信息;2. 根据电机数学模型计算出电机的磁链和电压;3. 根据控制算法计算出需要的d轴和q轴电流指令;4. 将电流指令转换为三相电流控制信号,实现对电机的控制。
在矢量控制中,关键是根据电机的数学模型建立控制算法。
在控制算法中,常用的控制方法包括电流内环控制和速度外环控制。
电流内环控制通过控制d轴和q轴电流来实现对电机磁链和电磁转矩的精确控制;速度外环控制则通过控制电机的机械转矩和转速,实现对电机运行的稳定性和性能的优化。
永磁同步电机矢量控制的实现
永磁同步电机矢量控制的实现永磁同步电机矢量控制的实现永磁同步电机是一种高效、高功率密度和高可靠性的电机,在工业领域中得到了广泛的应用。
为了提高永磁同步电机的性能,矢量控制技术被引入其中。
本文将详细介绍永磁同步电机矢量控制的实现过程,并探讨其优势和应用。
一、永磁同步电机矢量控制的原理永磁同步电机矢量控制的基本原理是通过控制转子磁场的方向和大小,使得转子磁场与定子磁场同步,并使转子磁场随时按照需要调整,从而实现电机的高精度控制。
具体来说,永磁同步电机矢量控制主要包括速度环控制和定子电流环控制两个环节。
1.1 速度环控制速度环控制是永磁同步电机矢量控制的核心环节,其目的是使电机的转速能够稳定地跟踪给定的速度指令。
其中,速度环控制主要包括速度估计和速度控制两个部分。
速度估计是通过测量电机的电流和电压信号,利用数学模型或滤波器等方法估计电机的转速。
估计出的转速信号可以作为反馈信号输入到速度控制器中,用于判断电机的转速与给定速度之间的偏差,从而进行相应的控制。
速度控制是根据估计出的转速信号和给定速度信号之间的差值,结合控制算法,对电机的输入电压或电流进行调整,使得转速能够稳定地跟踪给定的速度指令。
1.2 定子电流环控制定子电流环控制是永磁同步电机矢量控制的另一个重要环节,其目的是控制电机的定子电流,从而调节定子磁场的大小和方向,实现电机的角度和转矩控制。
定子电流环控制主要包括定子电流测量、电流控制和电流反馈等步骤。
定子电流测量是通过对电机的电流进行采样和测量,得到准确的定子电流值。
电流采样可以采用采样电阻、霍尔传感器等方式来完成。
电流控制是根据得到的定子电流值与给定的电流指令之间的差值,结合控制算法,对电机的输入电压或电流进行调整,从而使得电机的定子电流能够稳定地跟踪给定的电流指令。
电流反馈是将测量得到的定子电流值作为反馈信号输入到电流控制器中,以实现定子电流与给定电流之间的闭环控制。
二、永磁同步电机矢量控制的优势永磁同步电机矢量控制相较于传统的驱动方式,具有以下几个优势:2.1 高动态性能通过精确控制转子磁场的方向和大小,永磁同步电机矢量控制能够实现电机的高精度控制和快速响应。
《2024年永磁同步电机的矢量控制系统》范文
《永磁同步电机的矢量控制系统》篇一一、引言随着现代工业的快速发展,电机驱动技术已成为众多领域的关键技术之一。
其中,永磁同步电机(PMSM)以其高效、节能、高精度等优点,在工业自动化、新能源汽车、航空航天等领域得到了广泛应用。
而永磁同步电机的矢量控制系统作为其核心技术,更是研究的热点。
本文将详细介绍永磁同步电机的矢量控制系统的基本原理、组成及实现方法。
二、永磁同步电机的基本原理永磁同步电机是一种利用永磁体产生磁场,通过电磁感应原理实现能量转换的电机。
其工作原理基于法拉第电磁感应定律和洛伦兹力定律。
在电机的定子上安装有电枢绕组,通过改变电流的频率和幅值,可以控制电机的转速和转矩。
而转子上安装有永磁体,产生的磁场与定子上的磁场相互作用,使电机实现同步转动。
三、矢量控制系统的基本原理矢量控制系统是一种先进的电机控制技术,它通过控制电机的电流矢量,实现对电机转矩和转速的精确控制。
在永磁同步电机中,矢量控制系统通过对电机电流的幅值和相位进行精确控制,实现电机的高效、稳定运行。
四、永磁同步电机的矢量控制系统组成永磁同步电机的矢量控制系统主要由以下几个部分组成:1. 控制器:负责接收来自传感器或其他设备的信号,根据预设的控制算法计算控制信号,并输出给驱动器。
2. 驱动器:接收控制器的控制信号,将其转换为电机所需的电流信号,驱动电机运行。
3. 传感器:用于检测电机的转速、位置等参数,为控制器提供反馈信号。
4. 电源:为控制器、驱动器和电机提供所需的电能。
五、永磁同步电机的矢量控制系统的实现方法永磁同步电机的矢量控制系统的实现方法主要包括以下几个步骤:1. 传感器信号的采集与处理:通过传感器实时采集电机的转速、位置等参数,并进行信号处理,提取出有用的信息。
2. 控制算法的设计与实现:根据电机的实际需求和运行环境,设计合适的控制算法,如PID控制、模糊控制等。
并通过编程或硬件电路等方式实现控制算法。
3. 驱动器的设计与实现:根据控制器的控制信号,设计合适的驱动电路,将控制信号转换为电机所需的电流信号,驱动电机运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电气工程
12 伺服系统概述
永磁同步电机结构和工作原理 永磁同步电机的优势与应用 永磁同步电机的数学模型 永磁同步电机的控制方式 PMSM的转子磁场定向矢量控制 总结
12 伺服系统概述
1. 永磁同步电机的结构和工作原理
1.1 永磁同步电机(P M S M )的结构 ermanent agnetic ynchronous achine
12 伺服系统概述
3. 永磁同步电机的数学模型
3.1 在静止坐标系下的数学模型
电机的数学模型中含有时变参数,给分析和计算带来困难。为了简 化永磁同步电机的数学模型,首先对电机做如下假设:
(3)可靠性高。从电机本体来对比,永磁同步变频调速电机与 异步电机的可靠性相当,但由于永磁同步电机结构的灵活性,便于实 现直接驱动负载,省去可靠性不高的减速箱。在某些负载条件下甚至 可以将电机设计在其驱动装置的内部,从而可以省去传统电机故障率 高的轴承,大大提高了传动系统的可靠性。
12 伺服系统概述
转子导体内将产生感应电流。这个电流产生的磁场和定子绕组产生的旋转 磁场相互作用产生电磁转矩,从而使转子(永磁体)“跟着”定子磁场旋 转起来,其转速为n。如果能改变定子三相电源的频率和相位,就可以改变 转子的速度和位置。
12 伺服系统概述
为了使得永磁同步电动机具有正弦波感应电动势波形,其转子磁钢形 状呈抛物线状,使其气隙中产生的磁通密度尽量呈正弦分布。定子电枢采 用短距分布式绕组,能最大限度地消除谐波磁动势。
图1-1 定子三相对称绕组结构
1)永磁同步电机的结构主要包括定子、转子及测量转子位置的传感器。 2)定子采用三相对称绕组结构,它们的轴线在空间彼此相差120度。 3)转子上贴有磁性体,一般有两对以上的磁极。 4)位置传感器一般为光电编码器或旋转变压器 。
12 伺服系统概述
1.2 永磁同步电机的工作原理
(5)起动力矩大、噪音小、温升低。永磁同步电机在低频的时 候仍能保持良好的工作状态,低频时的输出力矩较异步电机大,运行 时的噪音小。
转子无电阻损耗,定子绕组几乎不存在无功电流,因而电机温升 低,同体积、同重量的永磁电机功率可提高30%左右;同功率容量的 永磁电机体积、重量、所用材料可减少30%。
12 伺服系统概述
(4)体积小,功率密度大。永磁同步变频调速电机体积小,功 率密度大的优势,集中体现在驱动低速大扭矩的负载时,一个是电机 的极数的增多,电机体积可以缩小。
电机效率的增高,相应地损耗降低,电机温升减小,则在采用相 同绝缘等级的情况下,电机的体积可以设计的更小;电机结构的灵活 性,可以省去电机内许多无效部分,如绕组端部,转子端环等,相应 体积可以更小。
带来更佳的舒适感。
12 伺服系统概述
电动汽车 伴随汽车工业的急速发展,环保问题也越来越严重,为了解决上
述问题,并且大幅改善燃油经济型,毫无疑问就是使用电动汽车。永 磁同步电机以其高效率、高功率因数和高功率密度等优点,正逐渐成 为电动汽车驱动系统的主流电机之一。
12 伺服系统概述
轨道交通领域 2007年,阿尔斯通公司研发的新一代永磁牵引电机系统的高速
AGV列车—V150,创下列车速度世界新纪录574.8km/h。
2015年6月24日,历时11年,累计1000万次试验,积累150G数据, 耗资1亿元,中国中车旗下株洲电力机车研究所有限公司攻克了第三 代轨道交通牵引技术,即永磁同步电机牵引系统,掌握完全自主知 识产权,成为中国高铁制胜市场的一大战略利器。
当电机对称三相绕组接通对称三相电源后,流过绕组的电流在定转子 气隙中建立起旋转磁场,其转速为:
n
ns
60 f p对数; 转子为永磁体且n与ns相同(同步); 磁场的转速正比于电源频率,反比于定子的极对数。 磁场的旋转方向取决于绕组电流的相序。由于电磁感应作用,闭合的
12 伺服系统概述
家电行业领域 由于永磁电机在低运转时效率极高,可以有效的降低频繁启动
的损耗,是实现家电节能的较佳技术途径之一。
12 伺服系统概述
船舶电力推进领域 推进电机是船舶综合电力系统的重要组成部分、永磁同步推进电
机具有体积小、重量轻、效率高、噪声低、易于实现集中遥控、可靠 性高、可维护性好等优点,是船舶推进电机的理想选择。
图1-2 旋转磁动势波形图
12 伺服系统概述
2. 永磁同步电机的优势与应用
2.1 永磁同步电动机的优势
我国电动机保有量大,消耗电能大,设备老化,效率较低。永 磁同步电动机(PMSM)具有体积小、效率高、功率因数高、起动力矩 大、力能指标好、温升低等特点。
12 伺服系统概述
永磁同步电机相比交流异步电机优势: (1)效率高、更加省电。由于永磁同步电机的磁场是由永磁 体产生的,从而避免通过励磁电流来产生磁场而导致的励磁损耗。 永磁同步电机的外特性效率曲线相比异步电机,其在轻载时效 率值要高很多,这是永磁同步电机在节能方面,相比异步电机最 大的一个优势。 由于永磁同步电机功率因数高,这样相比异步电机其电机电流 更小,相应地电机的定子铜耗更小,效率也更高。 永磁电机参数,不受电机极数的影响,因此便于设计成多极电 机,这样对于传统需要通过减速箱来驱动负载电机,可以做成直 接用永磁同步电机驱动的直驱系统,从而省去了减速箱,提高了 传动效率。
12 伺服系统概述
(2)电机结构简单灵活。由于异步电机转子上需要安装导条、 端环或转子绕组,大大限制了异步电机结构的灵活性,而永磁同步电 机转子结构设计更为灵活,如对铁路牵引电机,可以将电机转子的磁 钢可直接安装在机车轮对的转轴上,从而省去了减速齿轮箱,结构大 为简化。
由于永磁同步变频调速电机参数不受电机极数的限制,便于实现 电机直接驱动负载,省去噪音大,故障率高的减速箱,增加了机械传 动系统设计的灵活性。
2.2 永磁同步电机的应用案例
基于永磁同步电机上述众多优势,特别在目前国家“节能减 排”的大背景下,其应用前景极为广阔。随着永磁体及永磁同步 电机控制技术的日益成熟可靠,其应用范围基本上可以覆盖目前 应用电机所有领域。
12 伺服系统概述
电梯领域 永磁同步电机产生较小的谐波噪声,应用于电梯系统中,可以