水力式升船机承船厢液压系统仿真
90m自升式海上平台液压升降系统仿真分析
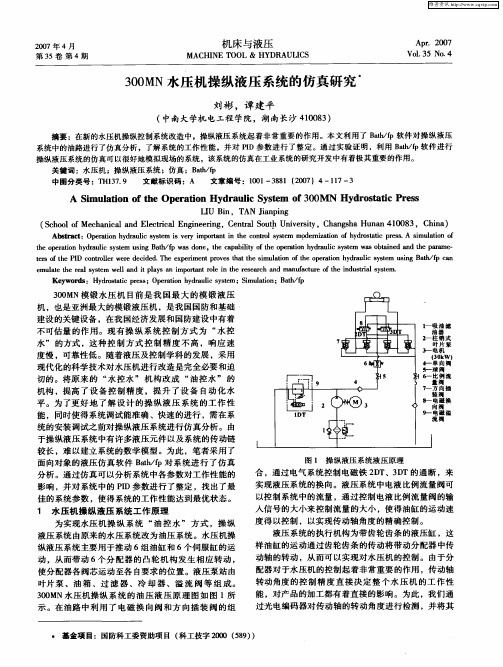
90m自升式海上平台液压升降系统仿真分析金豁然;李德堂;胡星辰;魏卓;杨尊儒【摘要】利用AMEsim软件对90m自升式海上平台液压升降系统建模.通过给定模拟信号,针对平台安全需求,对平台额定、预压和提升齿轮失效升降工况进行仿真,重点分析了液压系统中马达的性能.仿真结果表明:在预压工况和单只提升齿轮失效工况下,液压系统运行安全平稳,各马达的性能均能满足要求,拥有足够的扭矩和转速,能够安全可靠地驱动提升齿轮同步动作,带动平台主体或桩腿工作,验证了该系统设计的合理性.【期刊名称】《船舶与海洋工程》【年(卷),期】2016(032)003【总页数】7页(P10-15,26)【关键词】海上平台;AMEsim软件;液压升降;提升齿轮失效;预压载【作者】金豁然;李德堂;胡星辰;魏卓;杨尊儒【作者单位】浙江海洋学院船舶与海洋工程学院,浙江舟山316022;浙江省近海海洋工程技术重点实验室,浙江舟山316022;浙江海洋学院船舶与海洋工程学院,浙江舟山316022;浙江省近海海洋工程技术重点实验室,浙江舟山316022;浙江海洋学院船舶与海洋工程学院,浙江舟山316022;浙江省近海海洋工程技术重点实验室,浙江舟山316022;浙江海洋学院船舶与海洋工程学院,浙江舟山316022;浙江省近海海洋工程技术重点实验室,浙江舟山316022;浙江海洋学院船舶与海洋工程学院,浙江舟山316022;浙江省近海海洋工程技术重点实验室,浙江舟山316022【正文语种】中文【中图分类】U674.38+1海洋中蕴藏着丰富的油气资源,海洋石油开发已是当今世界的热点。
油气资源的勘探大部分都需要依靠海上平台,而自升式海上钻井平台是目前应用最广泛的移动式钻井设施[1]。
我国的自升式海上平台大多依靠进口,特别是作为自升式平台中核心部分的升降系统,几乎被国外生产厂家垄断,关键设备和技术掌握在国外厂商手里,严重制约着我国海洋油气的规模开发[2,3]。
浅析一种大型水坝升船机船箱液压系统
我国地域辽阔,河流众多,各大河流为蓄水和发电修建了诸多大型水坝,解决航运问题是建设大型水坝所面临的重要课题。
以往的航运方式,由于水位的巨大落差造成了水资源的严重浪费,对大型水电站和水资源较为紧张的河流是不可行的。
本文将介绍一种升船机装置,即在水坝的航道中建造液压升船箱,该装置在航运中不会造成水资源浪费,而且简便易行。
2 升船机船箱液压系统的工作原理及主要组成2.1 升船机船箱液压系统工作原理当升船机船箱靠近工位时,检测信号发信,夹紧缸伸出,先后靠在大坝固定梁后夹紧,顶紧缸推出,楔形块顶住销轴使船箱定位,此时应保证防撞梁降下,密封框退回,卧倒门开启,船箱与外航道连通,航运船只自由出入,当船只进入后,液压系统执行相反的动作。
通过船箱的提升和下降动作,以实现运送船只的过程。
2.2 升船机船箱液压系统主要组成升船机船箱液压系统设置系统动力源,卧倒门控制回路,防撞梁控制回路,夹紧控制回路(共两套),密封框控制回路,顶紧控制回路(共两套),均衡调平控制回路。
1)系统动力源泵吸油口设置吸油过滤器以防止吸入杂质及异物,泵出油口设置高压过滤器,向系统提供洁净的高压油。
系统采用恒压变量柱塞泵,实现在高负载状态下压力流量自我匹配。
油路中设置常规单向阀,防止高压反向冲击,起到保护泵的功能。
油路中并联单向电磁溢流阀,进行压力无级调节,全自动加压、卸载控制。
在压力油口设置压力传感器,液压泵油口设置压力继电器,以实现系统正常工作状态、低耗状态及过载保护的压力控制。
动力源设置一套活塞式蓄能器组,作为系统的补充和储备能源。
活塞式蓄能器配备6个氮气瓶供压,油流大、压力稳定,拥有优越的性能价格比。
2)卧倒门控制回路卧倒门控制回路设置双向液压锁,保证卧倒门的定位。
设置双向进油调速阀,控制卧倒门的开闭速度和同步运行。
设置回油背压顺序阀,防止出现负压失控卧倒门砸下现象。
3)防撞梁控制回路防撞梁控制回路设置进油减压阀,调整工作压力。
设置双向液压锁,保证防撞梁的定位。
自升自航式海洋平台液压升降系统设计与仿真
2018年第2期总第342期造船技术MARINE TECHNOLOGYNo. 2Apr.,2018文章编号:1〇〇〇-3878(2018) 02-〇026-〇5自升自航式海洋平台液压升降系统设计与仿真魏卓\李德堂u,陈树坤\苟瀚儒\刘文静2,方懂平3(1.浙江海洋学院船舶与海洋工程学院,浙江舟山316000;2.金海重工股份有限公司,浙江舟山316291;3.舟山巨洋技术开发有限公司.浙江舟山316000)摘要为突破升降系统设计制造的关键技术,以金海重工公司建造的90 m自升式海洋平台为研究对象,对平台的液压升降系统进行设计计算,利用AM ESim软件对液压升降系统进行建模仿真,按实际工况设置各仿真元件的具体参数以保证仿真准确性,通过升降试验进行验证。
仿真结果和试验结果表明:设计的升降保护装置可以消除液压系统故障对升降系统的影响,升降系统响应迅速、运行稳定,能满足各工况下的升降需求,可为自升式海洋钻井平台升降系统的设计研究提供科学参考。
关键词自升式海洋平台;升降系统;AM ESim仿真;升降试验中图分类号T H137 文献标志码 ADesign and Simulation of Hydraulic Lifting System of90m Jack up PlatformWEI Zhuo1,LI Detang1’2,CHEN Shukun1,GOU Hanru1,LIU Wenjing2,FAN G Dongping3(1. School of Naval Architecture and Ocean Engineering,Zhejiang Ocean University,Zhoushan 316000,Zhejiang,China; 2.Jinhai Heavy Industry Co. ,Ltd. ,Zhoushan 316291, Zhejiang,China;3.Zhoushan Giant Ocean Technology Development Co.,L td.,Zhoushan 316000,Zhejiang,China)Abstract In order to break through the key technologies for the design and manufacture of jacking systems,the90 m jack-up platform built by Jinhai Heavy Industry is selected as theresearch object,the hydraulic jacking system of the platform is designed and calculated,andthe hydraulic jacking system is modeled and simulated by AMESim software.The specific parameters of the simulation components are set up in accordance with the actual conditions toensure the accuracy of the simulation.The test is carried out by the up-and-down test.Thesimulation results and test results show that the designed lifting protection device can eliminate the influence of hydraulic system failure on the jacking system,and the jacking system responds quickly and is stable in operation.It can meet the lifting requirements under variousworking conditions and can be lifted for a jack-up drilling platform.Key words jack-up platform;jacking system;AMESim;up-and-down test〇引言21世纪将是海洋经济时代,据相关资料统计[1],90%的海底油气资源都在大陆边缘的近海区域,活动式海洋钻井平台因其适宜在浅海进行作业 而得到广泛使用。
液压系统建模和仿真SimHydraulics

液压系统建模和仿真SimHydraulics--液压系统建模和仿真SimHydraulics是液压传动和控制系统的建模和仿真工具,扩展了Simulink?的功能。
使用这个工具可以建立起含有液压和机械元件的物理网络模型,可用于跨专业领域系统的建模。
SimHydraulics提供了构成液压系统的元器件模块库,库中也包括了用于构造其它元件的基本元素模块。
SimHydraulics适用于汽车,航空,国防和工业装备等领域中的各种应用,例如自动变速器,舵面操纵系统和重载驱动装置的建模分析。
SimHydraulics同SimMechanics,SimDriveline和SimPowerSystems一同使用,能够支持对复杂机液系统和电液系统的建模,以分析他们相互交联的影响。
主要功能液压和液压机械系统的物理建模环境超过75个液压和机械元器件模型,包括泵,阀,蓄能器和管路基本液压构造元素库,还有基本机械和运算单元可定制的常用液压流体工作介质SimHydraulics可在Simulink下建立液压系统回路的网络模型,模型表达基于ISO1219流体传动系统标准,并且建立的模型可以同机械和控制器模型相结合。
机械液压和液压系统网络建模使用SimHydraulics可以建立起完整的液压系统模型,过程如同组建一个真实的物理系统。
SimHydraulics使用物理网络方式构建模型:每个建模模块对应真实的液压元器件,诸如油泵,液压马达和控制阀;元件模块之间以代表动力传输管路的线条连接。
这样,就可以通过直接描述物理构成搭建模型,而不是从基本的数学方程做起。
SimHydraulics库提供了75个以上的流体和液压机械元件,包括油泵,油缸,蓄能器,液压管路和一维机构单元,大部分商品化元器件都可以找到对应模型。
SimHydraulics的模型符号符合ISO1219流体动力系统标准,SimHydraulics可以自动从模型原理图综合出描述系统行为特征的方程组。
基于Unity3D与3Dmax的虚拟船舶液压系统三维模型展示
基于Unity3D与3Dmax的虚拟船舶液压系统三维模型展示作者:吕文梅宋代广来源:《软件导刊》2014年第06期作者简介作者简介:吕文梅(1987-)女,山东科技大学信息科学与工程学院硕士研究生,研究方向为软件工程;宋代广(1978-),男,临矿集团临沂亿金物资有限责任公司科长,研究方向信息管理。
0引言在科学技术飞速发展的今天,众多单位对虚拟技术的要求越来越高,也因此出现了很多虚拟系统来满足他们的需要。
对企业和电子商务来说,工业产品虚拟展示以三维的表现形式,全方位地展现一个物体,具有二维图像所不能比拟的优势。
目前,国内外比较流行的是应用于虚拟展示的Unity3D技术。
在实现虚拟产品展示时,主要是两大方面:一是三维模型的创建;二个是利用Unity3D 实现虚拟展示。
主要以船舶液压系统的展示为例,对三维模型与Unity3D 的完美结合进行研究应用。
长期以来,VRP的实现主要还是基于几何建模技术,但在计算机图形图像处理应的地址段。
如果存在通过BRAS拨号上网的用户,其IP地址池地址要和其它地址相分离,保证拨号上网用户必须通过BRAS认证和计费。
对于每个节点设备,统一规划各自的loopback地址,并和业务地址区分开,有利于以后的网络维护。
5结语随着今后业务数量的增长和业务对带宽要求的提高,传输带宽将逐渐成为瓶颈,无法满足用户的业务需求,此时需要运用QoS技术来保证重要业务的响应质量。
提高IP网络的服务质量,通常有两种实现方法:一是在全网络或网络瓶颈处实施QoS技术,二是增加网络中各交换节点的交换容量。
根据IP专用承载网及其业务的特点,国内大客户也可以在骨干网或城域网边缘有计划地实施QoS,以保证大客户的服务质量。
参考文献参考文献:\[1\]PETER TOMSU,CHRISTIAN SCHMUTZER.下一代光网络IP层的智能与光层技术的融合[M].龚倩,译.北京:人民邮电出版社,2003.[2]唐雄燕.智能光网络——技术与应用实践[M].北京:电子工业出版社,2005.[3]胡先志.构建高速通信光网络关键技术[M].北京:电子工业出版社, 2008.[4]张杰.自动交换光网络ASON[M].北京:人民邮电出版社,2004.[5]李秉钧,万晓榆,樊自甫.演进中的电信传送网[M].北京:人民邮电出版社,2005.[6]龚倩.高速超长距离光传输技术[M].北京:人民邮电出版社,2005.[7]纪越峰.李慧,陆月明.自动交换光网络原理与应用[M].北京:北京邮电大学出版社,2005.[8]龚双瑾.下一代网关键技术及发展[M].北京:国防工业出版社,2006.责任编辑(责任编辑:孙娟)技术高速发展的今天,已难以满足用户对虚拟现实中真实感的要求。
基于Modelica∕MWorks的舰船液压操舵系统建模与仿真
基于Modelica∕MWorks的舰船液压操舵系统建模与仿真舰船液压操舵系统是海洋船舶中非常重要的控制系统,它们负责将舵轮的运动转化为舵柄的旋转,从而改变船舶的方向。
为了保证船舶的运行稳定性和安全性,必须对其进行系统建模和仿真分析,以便在实际应用中发现并解决潜在问题。
本文将介绍使用Modelica∕MWorks进行舰船液压操舵系统建模和仿真分析的方法及结果。
首先,我们需要对舰船液压操舵系统进行建模。
该系统主要包括舵轮、舵链、齿轮、液压缸等多个部分。
在Modelica中,这些部分都可以被定义为一个个组件。
我们可以使用连接器将这些组件连接起来,形成完整的系统。
为了进一步简化模型,我们将使用代理组件来代替实际液压管道的建模,这样可以更方便地描述整个系统状态。
在建模过程中,我们需要确定每个组件的物理参数,例如模块的惯性、质量、弹性系数等。
这些参数通常是从船舶制造商提供的技术规格书和实验数据中获得的。
我们还需要定义控制算法和仿真参数,以便在仿真过程中模拟控制算法的交互。
接下来,我们可以使用Modelica的仿真工具MWorks来模拟系统的运行。
MWorks提供了与模型对应的仿真界面,方便用户控制仿真参数和查看模型输出结果。
在绘制结果时,我们可以添加曲线拟合和突变点检测等功能,对结果进行更深入的分析。
通过仿真结果,我们可以对舰船液压操舵系统的表现进行评估。
例如,我们可以检查系统响应时间是否足够快,是否存在过度振荡或不稳定性等问题。
如果在仿真过程中发现问题,我们可以通过调整组件参数或控制算法来改进系统性能,并通过重新仿真来测试改进效果。
总之,使用Modelic a∕MWorks进行舰船液压操舵系统建模和仿真分析是非常实用的方法,可以帮助我们发现潜在问题,并为实际应用提供指导。
在实际应用中,我们可以将该技术应用到各种不同类型的液压系统中,以支持基于仿真的设计优化。
为了更好地进行舰船液压操舵系统的建模和仿真分析,我们需要收集相关的数据,并进行分析。
水力式升船机承船厢液压系统仿真

水力式升船机承船厢液压系统仿真常奎;邱亚峰;赵晓军;毛喜旺【期刊名称】《机床与液压》【年(卷),期】2012(40)7【摘要】采用AMESim软件对升船机承船厢液压系统进行模拟仿真,得出承船厢液压系统各工作执行油缸的压力曲线和工作执行部件的位移曲线,并将仿真结果与理论计算结果和预设的理论值进行比较,结果基本吻合,证实了承船厢液压系统设计的可行性.%AMESim was used to make simulation for the ship chamber hydraulic system. The pressure curves of the cylinders and the displacement curves of the pistons were obtained. The simulation results were compared with the theoretical results and the default values and the results were consistent. So the design of the ship chamber hydraulic system is feasible.【总页数】4页(P135-138)【作者】常奎;邱亚峰;赵晓军;毛喜旺【作者单位】南京理工大学机械工程学院,江苏南京210094;南京理工大学机械工程学院,江苏南京210094;南京晨光集团有限责任公司,江苏南京210006;南京理工大学机械工程学院,江苏南京210094【正文语种】中文【中图分类】TH137.7【相关文献】1.液压升船机承船厢纵倾力矩计算研究 [J], 葛俊旭;沈寿林;张光乐;隋永声2.景洪水力式升船机承船厢充放水运行流程设计 [J], 刘锦;易春辉;王洋3.某大型升船机承船厢卧倒门电液同步控制系统仿真研究 [J], 向阳;王贵成;时文卓;王刚4.200米级齿爬式升船机安装过程中承船厢结构及驱动系统变形仿真 [J], 李红享; 梁恒诺; 张阳; 周吉; 李智; 石端伟5.水力式升船机承船厢受力特性研究 [J], 吴穹因版权原因,仅展示原文概要,查看原文内容请购买。
基于Unity3D与3Dmax的虚拟船舶液压系统三维模型展示
地 址要 和 其 它 地 址 相 分 离 , 保 证 拨 号 上 网用 户 必 须 通 过 BRAS认 证 和 计 费 。对 于每 个 节 点 设 备 , 统 一 规 划 各 自的 l o o p b a c k地 址 , 并 和业 务 地 址 区 分 开 , 有 利 于 以 后 的 网 络
在 全 网络 或 网络 瓶 颈 处 实 施 Qo S技 术 , 二 是 增 加 网 络 中
[ 6 ] 龚 倩 .高 速 超 长 距 离 光 传 输 技 术 [ M] . 北 京: 人 民邮 电 出版 社 ,
2 00 5 .
[ 7 ] 纪越 峰 . 李慧 , 陆 月 明 .自动 交 换 光 网 络 原 理 与 应 用 [ M] . 北京: 北
关键词 : Un i t y 3 D 虚拟 技 术 ; 船 舶 液 压 系统 ; 3 D ma x建模 ; 轻 量 化 建 模
中 图分 类 号 : TP 3 1 9
文 献标 识 码 : A
文章 编 号 : 1 6 7 2 — 7 8 0 0 ( 2 0 1 4 ) 0 0 6 — 0 7 4 7 4 0 7 4 — 0 3
2 01 4 年 6 月
V o1 .1 3 NO.6
J un e. 2 Ol 4
基于 U n i t y 3 D与 3 D ma x的虚 拟 船 舶 液 压 系 统 三 维 模 型 展 示
吕 文 梅 , 宋 代 广
( 1 . 山 东科技 大学 信 息科 学与 工程 学院 , 山东 青岛 2 6 6 0 0 0 ; 2 . 临矿 集 团临 沂亿 金 物 资有 限 责任公 司 , 山东 临沂 2 7 6 0 1 6 )
1000 t级超大型升船机承船厢结构有限元仿真
1000 t级超大型升船机承船厢结构有限元仿真
邓达人;黄金根;罗德武;王艺;高伟
【期刊名称】《机电工程技术》
【年(卷),期】2024(53)4
【摘要】根据升船机承船厢结构特点,对承船厢模型进行合理简化;利用三维建模软件CATIA建立升船机承船厢三维模型,利用有限元分析软件Abaqus建立升船机承船厢1/4结构有限元模型;根据升船机运行中重点关注的常载、超载和锁定3种重要工况,设定有限元模型载荷及边界条件,采用有限元法对1000 t级超大型升船机的承船厢结构进行仿真分析,通过静强度和刚度的计算分析,验证承船厢结构的安全性和可靠性。
研究所采用的计算方法简便可靠,能够全面反映承船厢结构的受力特性,对升船机的设计、制造和后期运行监测具有重要的指导意义。
该计算方法可推广应用于类似类型的升船机承船厢结构的设计和改造。
【总页数】3页(P92-94)
【作者】邓达人;黄金根;罗德武;王艺;高伟
【作者单位】中国电建集团贵阳勘测设计研究院有限公司;杭州国电机械设计研究院有限公司
【正文语种】中文
【中图分类】TU311
【相关文献】
1.升船机承船厢结构有限元分析研究
2.高坝洲升船机承船厢结构有限元分析
3.大型钢丝绳入水式升船机承船厢结构设计与有限元分析
4.200米级齿爬式升船机安装过程中承船厢结构及驱动系统变形仿真
5.三峡升船机承船厢的有限元分析
因版权原因,仅展示原文概要,查看原文内容请购买。
水力式升船机液压系统管道共振分析
件共 同对管道共振进行评估。利用 A E i M S m软件对承船厢液压系统进行建模 仿真 ,并验证其 仿真结果 的准确性 , 进 而得 出液压管道 内部压力 曲线及压力幅频特性曲线。再 用 A ss ny 软件对液压管道进行模态分析 ,得出管道的固
有频率 。通过 比较管道 内部压力幅频特性曲线和管道 固有频率 ,得出液压 管道不会 发生共 振 ,验证 了承船厢 液
nig t e h drul ppei it r a e s e u v s n p e s r mpltde fe ue c c a a trsi c r e . e n h y a i i lne n e n pr sur c r e a d r s u e a c l iu ・r q n y h r ce itc u s Th n Ans s v y
0 引言
液压 系统管 道共振 会造 成 系统 寿命 的锐减 ,削
弱 系统 可靠性 ,甚 至会造 成工 程事 故 。因此 ,管道
了新途径。 1 升 船 机 承 船 厢 液 压 系统 工 作 原 理
承船 厢液压 系 统 分 为 调 平 液 压 系 统 、夹 紧 液 压 系统 、顶 紧 液 压 系 统 和 防撞 液 压 系 统 。调 平 液 压 系统 的功 能 是 完成 船 厢 水 平 位 置 调 整 。 夹 紧 和 顶 紧 液 压 系 统 是通 过 调 节 摩 擦 片挤 压 船 厢 运 动 轨 道 ,以确 保 船 厢 与 坝 体 位 置 锁 定 。 防撞 液 压 系 统 的功能 是升 降防撞 梁 ,以 防止船身 撞击 船厢 。 船 厢上 的设 备 分 为 4组 ,分 别 设 置 在 以船 厢 中心为 原 点 的 4个 象 限 ,每 个 象 限 的设 备 由一 个 液压 能源 进 行 控 制 。 列举 一 个 象 限进 行 分 析 ,承
某型艇车装卸液压系统数字仿真研究
一
:= :
: :
通 过在 AD AMS中添加 约 束 、 和 驱动 来进 行艇 车装 卸 力
载 的动 力 学 分析 ,如 图 2所 示 为 A A D MS中 的艇 车 模
型。
箱 , 原 理 图如 图 4所 示 。可 以看 出 , 其 平衡 阀在 系统 中
起 关键 作 用 , 以保 证装 卸 载过 程 的平 稳 , 止发 生失 用 防
12 装卸载 动力 学分析 .
为 精 确仿 真 艇 车装 卸 载 过程 ,本 文运 用 P E于 m, AA D MS联合 的方式 【 在 P O E中建 立 艇 车 的参 数化 J 】 , R /
模 型 , 本文 需要 考 察 的装 卸 机 构各 模块 如 液压缸 、 对 基
臂、 基臂 支座 、 缸支 座 、 主 主臂 、 臂 等进 行精 确 的参数 辅
液 压 气 动 与 密  ̄' 0 1年 第 6 期 J2 1 /
某 型艇 车装 卸 液压 系统数 字 仿 真研 究
杨建 峰 王 强 吴 应 奎 冯 国勇 0
7 25 ) 3 7 0 107 . 0 3 甘肃酒 泉 (. 1 解放 军理工 大学 工程兵 工程学 院 , 苏南京 2 0 0 ; 26 6 2部 队 , 江
Ke W o d : a tb a- r c y r s u o o t t k; la i g n u l a i g h d a l s se u o d n a d n o dn ; y ru i y t m; smu a in c i lt o
O 引言
某 型 艇 车是 我 军 现役 某 型 汽 艇 的 陆地 运 输 装备 。 在 长 期 的使 用 过 程 中发 现其 在 装 卸 载 时 存 在 低 频 抖 动、 噪声 大 , 卸载 到下 止点 或装 载 到上 止点 处 时 出现装
219383046_升船机船厢门锁定机构液压系统部件内泄漏仿真分析
升船机船厢门锁定机构液压系统部件内泄漏仿真分析杨博,朱汉华,吴洁,陈聪(武汉理工大学船海与能源动力工程学院,湖北武汉430063)摘要:升船机的船厢门锁定机构液压系统部件内泄漏是影响船厢门性能和可靠性的主要故障形式。
文章选取了船厢门锁定机构的锁定油缸和电磁换向阀作为研究对象,分析了内泄漏问题的故障机理,并在AMESim软件平台上分别搭建了锁定油缸和电磁换向阀的内泄漏仿真模型。
分别计算了锁定油缸和电磁换向阀的间隙量、偏心距和油液动力黏度等不同参数对内泄漏量的影响,得到了锁定油缸内泄漏量和电磁换向阀内泄漏量随时间的变化曲线。
仿真结果表明,间隙量对内泄漏量的影响最大,及时换新液压油,保证安装精度可以有效减小内泄漏量。
关键词:船厢门锁定机构;内泄漏;故障仿真;AMESim软件中图分类号:TH137文献标志码:A doi:10.13352/j.issn.1001-8328.2023.03.009Abstract:The internal leakage of the hydraulic system components of the cabin door locking mechanism of a ship lift is the central failure mode affecting the performance and reliability of the cabin door.This paper selects the locking cylinder and the electromagnetic directional valve of the locking mechanism for the cabin door as the research objects,and the failure mechanism of the internal leakage is analyzed.In addition,the internal leakage simulation models of the locking cylinder and the electromagnetic directional valve are respectively built on the AMESim soft⁃ware platform.The influence of different parameters such as clearanc,eeccentricity,and oil dynamic viscosity of the locking cylinder and the electromagnetic directional valve on the internal leakage is calculatedand the change curves of the internal leakage of the locking cylinder and the electromagnetic directional valve with time are obtained. The simulation results show that the clearance imposes the greatest impact on the internal leakageand the internal leakage can be effectively reduced by timely replacing the hydraulic oil to ensure installation accuracy.Key words:locking mechanism of cabin door;internal leakage;failure simulation;AMESim software升船机作为船舶快速通过大坝的重要通道,其安全性是船舶快速通行的必要保障[1]。
船用起重机开闭式液压系统的仿真分析比较
船用起重机开闭式液压系统的仿真分析比较任建辉;汤波;姬红斌;王进峰【摘要】为比较船用起重机开、闭式液压系统的性能差异,以30 t/28 m船用起重机为研究对象,应用AMESim仿真平台分别建立开、闭式液压系统中起升回路的仿真模型,对其在最大工作幅度28 m、起吊额定载荷30 t工况进行仿真分析,结果表明,闭式液压系统能够回收电动机反馈制动产生的电能,系统效率和起吊重物时的压力冲击高于开式液压系统,两者对机械结构的冲击基本一致.【期刊名称】《船海工程》【年(卷),期】2015(044)001【总页数】5页(P107-111)【关键词】船用起重机;AMESim;开式系统;闭式系统;仿真【作者】任建辉;汤波;姬红斌;王进峰【作者单位】武汉船用机械有限责任公司,武汉430084;武汉船用机械有限责任公司,武汉430084;武汉船用机械有限责任公司,武汉430084;武汉船用机械有限责任公司,武汉430084【正文语种】中文【中图分类】TH137按照调速方式的不同,船用起重机液压系统有开式和闭式两种形式[1]。
开式液压系统一般采用负载敏感控制,通过变量泵和负载敏感阀,使泵的输出功率与负载相适应,从而达到节能的目的[2];闭式液压系统一般采用变量泵直接控制液压马达,节流损失小、效率高,但结构复杂、成本较高。
目前,相关文献主要集中在对闭式液压系统的实际故障进行处理和开、闭式液压系统工作原理的分析比较及节能探讨[3-4]。
由于船用起重机液压系统往往需要根据实际情况选用开式或闭式系统,因此,对两者性能进行分析。
起升回路是用来实现货物升降的回路,是起重机中最基本最重要的回路,其工作性能的优劣将直接影响起重机的技术性能。
1.1 仿真模型的建立船用起重机闭式液压系统中起升回路在仿真平台AMESim中的模型见图1。
其工作原理为:在起升重物的过程中,异步电动机驱动变量泵,变量泵输出的高压油直接进入液压马达,通过行星齿轮减速机驱动卷扬机工作;在下放重物的过程中,液压马达工作在泵工况,而液压泵则工作在马达工况,并拖动异步电动机加速旋转,当转速超过其同步转速时,电动机处于反馈制动状态,输出转矩与转动方向相反,从而实现对重物下放速度的控制。
景洪水力式升船机承船厢充放水运行流程设计
景洪水力式升船机承船厢充放水运行流程设计刘锦;易春辉;王洋【摘要】Hydraulic ship lift is a kind of navigation structure for ships to cross a high dam, the validity and rapidity of its electrical control system is very important. Taking the water driving system and ship-chamber system of the project of Jianhong ship lift as an example, we apply a set of program flow for the combined water filling and discharging valves and tumble gates of the ship chamber to meet the needs of auto filling or discharging water for the tank of the ship-chamber.This method has been successfully validated in Jinghong hydraulic ship lift.%水力式升船机是高坝通航建筑物,其电气控制系统的正确和快速反应极为重要.以景洪水力式升船机的驱动系统和承船厢系统为例,采用充、泄水阀门和承船厢的上、下游卧倒门的自动化控制流程,通过升降承船厢实现厢内自动快速充放水,此方法已在景洪升船机取得成功应用.【期刊名称】《水运工程》【年(卷),期】2017(000)012【总页数】6页(P14-19)【关键词】水力式升船机;充水阀门;泄水阀门;卧倒门;控制流程;厢内自动充放水【作者】刘锦;易春辉;王洋【作者单位】西安航天自动化股份有限公司, 陕西西安710065;西安航天自动化股份有限公司, 陕西西安710065;西安航天自动化股份有限公司, 陕西西安710065【正文语种】中文【中图分类】U642.2设计有升船机的通航建筑物与内河航道之间是点与线段的关系,河流各梯级航道由通航建筑物连接成为全线畅通的航道网,在水运交通中占有十分重要的地位。
船舶起货机液压系统的可视化仿真
船舶起货机液压系统的可视化仿真贾小平;孙贤贤【摘要】针对当前船舶液压系统科研和教学过程中传统实物设备的封装性、隐蔽性、抽象性不足等问题,提出并实现了一套模拟和再现液压系统整体工作场景和液压油流动特性的可视化仿真系统。
运用纹理映射方法对管道内液压油的流体特性及形态进行模拟;运用数值方程对液压系统工作机制和液压油动力学规律进行模拟,成功地仿真了船舶起货机液压系统的工作过程,为船舶起货机液压系统的科学研究和教学训练提供了有效手段。
%Aiming at the encapsulation, concealment and abstract problems of traditional marine hydraulic equipment during research and teaching, a visual simulation system is proposed and implemented to emulate the entire hydraulic system working procedure and hydraulic oil flow characteristic.The texture mapping method is used to simulate appearance of hydraulic oil in pipe.Numerical equations are used to simulate hydraulic component working mechanism and hydraulic oil dynamics to simulate successfully the working process of the marine crane hydraulic system, providing a new effective approach for scientific research and training of marine crane hydraulic system.【期刊名称】《船海工程》【年(卷),期】2015(000)006【总页数】4页(P78-81)【关键词】液压系统;数值方法;纹理映射;流体;仿真【作者】贾小平;孙贤贤【作者单位】大连海事大学轮机工程学院,辽宁大连116026; 青岛远洋船员职业学院,山东青岛266071;青岛民航凯亚系统集成有限公司,山东青岛266108【正文语种】中文【中图分类】TP391.9;U664.4液压系统以其执行功率大、结构紧凑、工作平稳可靠、换向冲击小、能够实现无极调速等突出优点而普遍应用于航空航天、机械制造、船海工程等各个领域[1]。
300MN水压机操纵液压系统的仿真研究
Ab t a t s r c :Op rt n h d a l y tm s v r mp r n n t e c n r ls se m9 e n z t n o y rsai r s . smu ain o ea i y r u i s se i ey i o t ti h o to y t m d r i i fh d o tt p e s A i l t f o c a ao c o
维普资讯
20 0 7年 4月
机床与液压
MACHI NE TOOL & HYDRAUL CS I
Ap . 2 0 r 07
采用比例控制与压力补偿的船用升降机液压系统仿真研究
采用比例控制与压力补偿的船用升降机液压系统仿真研究肖清;叶冀萍;郑立捷;刘瑞海【期刊名称】《机床与液压》【年(卷),期】2012(040)014【摘要】利用AMESim仿真工具建立了采用比例控制与压力补偿的船用升降机液压系统的模型,并对该液压系统进行了仿真,得出了升降机在不同供油压力、负载下的速度曲线.仿真结果可用于验证该系统的设计合理性及系统的进一步优化.%The model of shipboard elevator hydraulic system with proportional control and pressure compensation was built using AMESim. And this hydraulic system was simulated. The velocity curves of the elevator at different supply oil pressures and loads were gotten. The simulation results can be used to verify the design reasonability of the system and to optimize the hydraulic system.【总页数】3页(P70-72)【作者】肖清;叶冀萍;郑立捷;刘瑞海【作者单位】中国舰船研究设计中心,湖北武汉430064;中国舰船研究设计中心,湖北武汉430064;中国舰船研究设计中心,湖北武汉430064;中国舰船研究设计中心,湖北武汉430064【正文语种】中文【中图分类】TH137【相关文献】1.基于压力补偿器的液压比例控制系统技术改造 [J], 万飞;2.某型船调距桨装置液压系统仿真及试验研究分析 [J], 李光;戚珩;姜红刚3.采用负载压力补偿的变频调速液压电梯控制系统 [J], 陈娟;徐兵;杨华勇4.有双端缓冲装置的船用液压升降机动态特性仿真研究 [J], 郑立捷;叶冀萍;邱磊;杜昭晖5.水辅成型水液压系统的压力比例控制试验研究 [J], 张增猛;高院安;周华;王佳因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
水力驱 动式 升船 机 是一 种新 型 的通 航 过坝 建筑 物 ,在安全性及机构 的简化方 面跟其 他型式 升船机相
比具有较 大的优 势。 承船厢液压 系统是水力式升船机液压系统 的重要 组 成部分 ,其作用是保证承船厢在工作过程 中时刻处 于水平状态及水平位置锁定 。承船厢液压 系统性 能的 好坏对升船机 的实用性 和安全性 至关 重要 ,因此研 究 承船箱液压 系统对 我国水力式升船机性能的提高意义 重大 。 与传 统的理论计算方法不 同 , 利用 A E i M Sm仿真 软件 图形化 的建模方法 ,可 以方便快捷地构 建诸 如升 船机这类复杂 的机 电液一体化 系统 , 通过 改变设计参 数 , 以替代 实物样 机进行设 计参数 的测试 评估 ,可 可 缩短设计周期 , 避免重大设计 错误 ,节省制 造费用 和 时 间 , 开发成本大大降低 。 使 1 承 船厢 液压 系统 工 作原理 承船厢设备液压系统分为调平液 压系统 、夹 紧液 压系统 、顶紧液压系统 和防撞液压 系统。调 平液压 系 统的功能是完成船厢调 平。夹 紧和顶紧液压系统是通 过摩擦片挤压船 厢运动轨道 ,以保证船厢与坝体位置 锁定 。防撞液压 系统的功能是升降 防撞梁 ,以防止船
基金项 目:国家重点建设工程资 助项 目 作 者 简 介 :常 奎 ( 9 7 ) 1 8 一 ,男 ,硕 士 ,研 究 方 向为 机 械 电 子 。E—m i hn ki S 13 cr。 al a guY M@ 6 .o :c n
・
16・ 3
机床与液压
第4 0卷
溢流阀进行 压力调节 ,以保证系统缓慢建压 。当系统
水 力式 升船 机 承船 厢 液 压 系统 仿真
常奎 ,邱亚峰 赵 晓军 ,毛喜 旺 ,
( .南京A - 大学机械 工程 学 院 ,江 苏南京 209 ; 1 v - 104 2 .南京晨 光 集 团有 限责 任公 司,江 苏南京 200 ) 10 6
摘要 :采用 A S ME i m软件对升船机承船厢液压 系统进行模 拟仿 真 ,得出承船厢 液压系统各 工作 执行油缸 的压力 曲线和 工作执行部件 的位移 曲线 ,并将仿 真结 果与理论计算结果和预设 的理论值进 行 比较 ,结果基本 吻合 ,证实 了承船 厢液压系
此 阶段 因无杆 腔工作压力较高 ,换 向时产生了压力 冲 击 ,导致 有杆 腔压力 迅 速升高 ,可 达 2 P ,未超 3M a 过系统设定安全压 力 ,且无 杆腔泄压 过程 比较平稳 , 如图 7所 示 ,压 力 曲线 没有 大 的波 动 ,符 合 工作 要
求。
25 2 0
置 ( 位移为 0 0 ,即摩擦片碰到滑动导轨 时 ,无 . 6m) 杆腔内的压力 升高 ,摩擦片与导轨之间的压力达到预 定值时 ,力传感器发 出控制信 号 ,系 统保压 ;同时 , 因无杆腔压力突然升高 ,有 杆腔压力有个小跳跃 ,但 随之就 回到 0 ,不影 响 系统 正 常 工作 ;t 8—8 =3 0S 时 ,系统处 于保压状态 ,无杆腔和有杆腔压力 分别保
表 1 A Sm仿真参数表 ME i
压缸保压 ,有杆 腔和无 杆 腔压力 分 别为 1. 7 0 24 1和 0 1M a . P 。压力 曲线与 位移 曲线 比较光 滑 ,说 明调平 油缸工作平稳 ,符合实际工作要求 。
l 8 1 6 14 l 2 10 0
.
2
皇 8
6
目 - 4 昌 6
. .
.
4 2 பைடு நூலகம் 2 O
8
2 4 ,6 8 1 0 O 0fs 0 0 0
0
2 4 0 n 6 8 l0 0 0 0 fs ,
图 5 调 平 液 压 油
图 6 调 平 油缸 活塞
缸压力 曲线
杆位 移曲线
统设计 的可行性 。 关键词 :承船厢液压 系统 ;A Sm软件 ;工作压力 ;位移 ME i
中 图 分 类 号 :T 3 . H177 文献 标 识 码 :A 文 章 编 号 :10 —3 8 (0 2 0 1 8 1 2 1 )7—15— 3 4
Si u a i n o hi m l to f S p Cha mbe d a i y t m n hi lf y t m r Hy r ulc S s e i S p—i S se t
状况 。
图 2 承船厢液压 系统原理 图
具体模型如 图3 所示 。
图 3 A Sm仿真模型图 ME i
第 7期
常奎 等 :水力式升船机承船厢液压系统仿真
・1 7・ 3
在参数模 式 ( a m t d )下设 定每 个元件 Pr e r a e Moe 所需 的参数 ,主要仿 真参 数如表 1 所示 。
身撞击船厢 。 承船厢 液压 设备 如 图 1所示 ,由 4套 夹 紧装置 ( 8个夹紧油缸 ) 、2套顶紧装 置 ( 2个顶 紧油缸 ) 、2 套 防撞装 置 ( 4个油缸 ) 4只钢丝绳 调平油缸 ( 、6 简 称调平油缸 ) 、4套船 厢设 备液 压系统 、6 机械调 4套 平装置等设备组成。船 厢上 的这些设备分为 4组 ,分 别设置在船厢的 4个象 限 ,每个象限 的设 备 由一个 液 压能源进行控制 。
持在 2 0和 0 M a =8 P 。t 0~8 时 ,有 杆 腔 进 油 ,活 3S
塞杆收 回,活塞 杆 位移 由 00 回到 初始 位 置 0 .6 m ,
是根据升船机 液压 系统设计 中的数值所设 置。 根 据升船 机的工作流程设置控制信号 。以船厢上 行 为例 ,将船 上行简化为 :船厢调平一夹紧机构推 出 ( 位置锁定 )一 降 防撞梁 ( 开舱 门 ,等待船 入船 厢 ) 一提防撞 梁 ( 入船 厢 ,关 舱 门)一 收 回夹 紧装 置 船 ( 船厢上行 ) 。船 厢设 备 液压 系统 的控 制 信号 如 图 4 所示 ,图中实线 、虚线和点划线分别为调平 、夹 紧及 防撞油缸控制信号 。
C A G K i,Q U Y fn HA i jn , O Xw n H N u I a g ,Z O X a u MA ia g e o ( .ntueo c a i l nier g N nigU i ri f c n ea dT c n l y 1 Istt f i Mehnc g ei , aj n esyo i c n eh oo , aE n n n v t Se g
达到额定压力后 ,根据系统指令 ,电磁 比例换 向阀的 相应 电磁铁通 电动作 ,液压缸开始工作 ;待工作部件 达到预定位 置且 系统压力 稳定后 ,电磁 比例换 向阀断 电,阀芯 回中位 ,油缸工作 腔处 于保压状态 。另外 在 每个油缸 的有杆腔和无杆腔均设置 了压力及位移传感 器 ,对油缸两腔 的压差和活塞杆位置进行检测 。
日
60 50
1 5
4 0
昌
蓦 l O
5
昌3 0
20
0
—
1 0
0
5
图 7 夹紧液压油 缸压力 曲线
图 8 夹 紧 油 缸 活 塞
图 1 船 厢 液 压 系统 三 维 图
列举一个象限进行分析。承船厢液压系统液压原 理如 图 2 所示 ,调平 、夹紧及 防撞油缸 由一个液压能 源控制 。采用 电磁换 向阀、比例溢流阀与电磁溢流 阀 的组合形式进行调压 。在 电机泵组启动时 ,采用 比例
收 稿 日期 :2 1 — 3— 3 0 1 0 2
夹紧液压油 缸压 力 曲线及 活 塞杆位 移 曲线 如 图 7 、8所示 。由图可得 t 3 3 时 ,无 杆 腔进油 , = 5~ 8S 活塞杆空载推出 ,当活塞杆前段摩擦片到达预定的位
技术要求 2 4h内调平 油缸活塞 位 移量不 得 大于 1m m。因此 为位移传感器设置 的 0 0 1 为假设 调平 .0 m 油缸偏离水平位置 的距 离。0 0 、3I 分别为夹 紧和 . 6 1 l 防撞油缸 的工作行 程 。为力 传感器 设置 的 900 0N 2 0 为夹紧油缸工作载荷 的大小 。仿真模 型中其他参数都
21 0 2年 4月
机 床与液压
M ACHI NE T0OL & HYDRAUL C IS
Ap .2 1 r 02 Vo . 0 No 7 14 .
第4 0卷 第 7期
DO : 0 3 6 /.sn 1 0 I 1 . 9 9 jis. 0 1—3 8 . 0 2 0 . 4 8 12 1 . 7 0 3
N nigJ n s 10 4,C ia aj i gu2 0 9 n a hn ; 2 N nigC e g agG o o ,Ld N nigJ ns 10 6 . aj h nu n rpC . t , aj i gu2 0 0 ,C i ) n n a h a n
Ab ta t AMES m a s d t k i lt n fr t e s i h mb r h d a l y tm.T e p e s r u v s o h yi d r sr c : i w su e o ma e smu ai o h h p c a e y ru i s se o c h rs u e c r e ft e c l e s n a d t e d s l c me t u e f h itn e e o ti e .T e smu ai n r s l r o a e t et e r t a e ut n h e n h ip a e n r so e p s sw r b an d cv t o h i l t e u t we ec mp r d wi t h o ei l s l a d t e d — o s hh c r s fu tv l e n h e u t w r o s tn . S h e i n o e s i h mb rh d a l y tm sf a i l. a l au s a d t e r s l e e c n i e t o t e d sg ft h p c a e y r ui s se i e s e s s h c b Ke wo d :S i h mb rh d a l y tm ;AME i s f r ;W o k p e s r ;Dip a e n y r s hp c a e y rui s s c e S m ot e wa r r su e s lc me t