基本功能块的使用
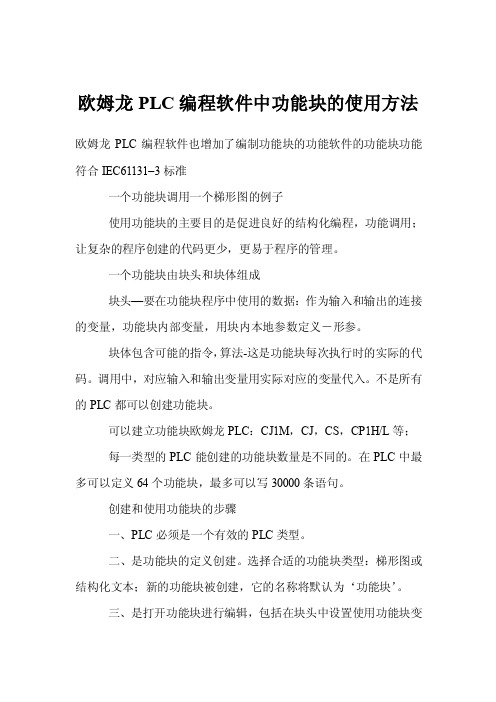
Honeywell霍尼韦尔C DCS系统学习

工厂数据 库系统 PHD
安全只读访问过程 画面的Web 服务器
工厂业务客户端 Web 浏览器
防火墙 工厂信息网络
工厂资产管理 Asset Manager
远程操作 Experion 操作站
多变量优化控制 Profit Suite
数字视频管理器 Digital Video Manager
仿真系统 UniSim
23
操作站中数据的来源: 1, Server中的过程数据及相关的报警和事件,直接来自
于控制器。 2, ES-F中的过程数据及相关的报警和事件,还有其他数据
信息,直接来自于服务器。 3, ES-C中的过程数据及相关的报警和事件,直接来自于控
制器;其他数据信息直接来自于服务器。 4, ES-CE中的过程数据及相关的报警和事件,还有其他数
热电阻和热电偶)
17
R300 C系列现场总线FF架构
Experion 服务器
操作站
容错以太网FTE 容错以太网FTE
C300 控制器 C300 IO
18
控制防火墙
FF接口
FF H1 总线
FOUNDATION™ Fieldbus FOUNDATION™ Fieldbus FOUNDATION™ Fieldbus
最高优先级;
- 广播信息风暴抑制 - 控制器不受上层IP网络通讯量的影响; • 可选光纤接口 - 光纤(FO)用于上层设备连接 - 单模光纤 (15 km) - 多模光纤 (2 km)
16
可选光纤 连接口
FTE 连接
C 系列I/O卡件的类型
• 模拟量输入卡(支持HART协议)—CC-PAIH01 • 模拟量输入卡(不支持HART协议)-- CC-PAIX01 • 模拟量输出卡(支持HART协议)-- CC-PAOH01 • 模拟量输出卡(不支持HART协议)-- CC-PAOX01 • 数字量输入卡(24VDC)-- CC-PDIL01 • 数字量输入卡(支持SOE)-- CC-PDIS01 • 数字量输入卡(高电压)-- CC-PDIH01 • 数字量输出卡(24VDC)-- CC-PDOB01 • 数字量输出卡(带有继电器板)-- CC-PDOB01 • 多路低电平模拟量输入卡-- CC-PAIM01(主要用于
Codesys——PLCopen基本运动控制功能块的使用方法总结
Codesys——PLCopen基本运动控制功能块的使⽤⽅法总结MC_Halt在MC_MoveVelocity模式下,⽤MC_Halt停⽌其轴,当前轴的状态由ContinuousMotion(当前转速)---》DiscreteMotion(速度不为0)---》Standstill(速度为0)。
MC_Stop在MC_MoveVelocity模式下,⽤MC_Stop停⽌其轴,当前轴的状态由ContinuousMotion---》Stopping---》StandStill(速度为0)MC_Reset当轴出错时,执⾏MC_Reset可清除轴错误,但不会掉使能。
执⾏复位功能块,也有可能报错;当轴报错且错误代码为34时,很有可能是MC_Stop的Execute⼀直为TRUE,此错误不需要⽤MC_Reset命令清除。
当取消MC_Stop的输⼊端Execute为FALSE后,就可以执⾏其他功能块。
MC_Power在bRegulatorOn为TRUE且bDriveStart为TRUE时,给Enable⼀个上升沿,MC_Power的输出Status就为TRUE。
上使能成功之后,即使修改输⼊端Enable为FALSE,其输出端Status仍然为TRUE。
MC_MoveVelocity每次要更新轴的设定速度时,需要给MC_MoveVelocity输⼊端的Execute⼀个上升沿,设定的速度值才会被更新到轴状态中。
MC_GearIn同MC_MoveVelocity,每次更新电⼦齿轮⽐并发挥作⽤,需要给MC_GearIn输⼊端Execute⼀个上升沿,电⼦齿轮⽐才会起作⽤。
MC_GearOut脱离齿合后,轴以脱离时的速度继续转动。
操作系统基本功能模块有哪些

操作系统基本功能模块操作系统是计算机系统中最核心的组成部分之一,负责管理和控制计算机硬件资源,为应用程序提供一个稳定、高效的运行环境。
为了实现这一目标,操作系统通过不同的功能模块来完成不同的任务。
本文将介绍操作系统的基本功能模块。
1. 进程管理进程是操作系统中最基本的执行单元,操作系统负责创建、调度和终止进程。
进程管理功能模块包括进程的创建、销毁、调度和同步等操作。
•进程创建:操作系统负责创建新的进程,并为其分配所需的资源。
它通常涉及到为进程分配唯一的进程标识符(PID)、内存空间和其他资源。
•进程销毁:当一个进程完成了它的任务或发生错误时,操作系统负责终止该进程并释放其占用的资源。
•进程调度:操作系统根据一定的调度策略决定哪个进程能够执行,并且在不同进程之间进行切换,以保证系统资源的高效利用和进程的公平性。
•进程同步:多个进程之间可能需要相互协作,操作系统提供了一系列的机制(如信号量、互斥量等)来实现进程之间的同步和通信。
2. 内存管理内存管理是操作系统的关键功能之一,它负责管理计算机的物理内存和虚拟内存。
内存管理功能模块包括内存分配、地址映射、内存保护和内存回收等操作。
•内存分配:操作系统负责将内存空间划分为不同的块,并为进程分配所需的内存空间。
这可以通过分页、分段和段页式等不同的内存管理方式来实现。
•地址映射:操作系统将程序中使用的逻辑地址映射到物理内存地址,以便正确访问内存中的数据和指令。
•内存保护:为了保护进程和操作系统的安全,内存管理模块提供了机制来限制进程访问其他进程或操作系统的内存空间。
•内存回收:当进程终止或不再需要某块内存时,操作系统负责回收该内存并将其释放给其他进程使用。
3. 文件系统文件系统是操作系统中负责管理存储设备和文件的功能模块。
它提供了一种组织和访问文件的方式,使得用户可以方便地存储和检索数据。
•文件管理:操作系统负责文件的创建、删除和修改等操作,并提供了一系列的文件访问接口供应用程序使用。
功能块(FB)教材
目录第一章功能块(FB)编程概述11.1功能块(FB)简介11.2功能块(FB)使用特点11.3功能块(FB)使用环境21.3.1 支持FB功能的PLC类型21.3.2.支持FB功能的软件21.3.3 CX-Programmer6.0功能块特点2第二章梯形图功能块32.1梯形图功能块编程基础32.1.1梯形图功能块结构介绍32.1.2 梯形图功能块编辑区介绍42.2创建功能块42.2.1 新建梯形图FB52.2.2 设置功能块变量62.2.3 编写FB梯形图72.3使用功能块82.3.1 调用梯形图功能块82.3.2 梯形图FB的嵌套92.3.3 保存梯形图FB112.3.4 调试梯形图FB112.4FB存分配注意事项13第三章高级语言(ST语言)功能块15 3.1ST语言功能块编程基础153.1.1 高级语言编程概念153.1.2 ST语言编程特点153.2ST语言编程系统介绍163.2.1 ST语言常用运算符173.2.2 ST语言基本命令183.2.3 ST语言编程规则213.3创建ST语言FB223.4ST语言FB的使用243.4.1 调用ST语言FB243.4.2 ST语言FB的嵌套243.4.3 ST语言FB的保存和调试25第四章功能块——FB库264.1FB库概述264.1.1 FB库特点264.1.2 FB库应用简介264.2FB库容介绍284.2.1 FB库容简介284.2.2 FB库功能分类284.3FB库功能块使用294.3.1 创建FB库中的功能块294.3.2 阅览FB库中的功能块程序304.3.3 调用FB库中的功能块30第五章功能块应用示例31附录一:ST语言语法错误一览表36第一章功能块(FB)编程概述OMRON编程软件CX-Programmer从5.0版本开始,增加了一个全新的编程功能——功能块(Function Block,简称FB)。
CJ、CS、CP1H系列的PLC可以使用这个功能进行编程,它大大增强了CX-Programmer软件对PLC编程、控制和调试的能力。
FB2功能块的使用说明
FB2功能块的使用说明FB2是一种功能块,可在各种软件和程序中使用,以实现特定目的。
它是一种可重复使用的模块,可以在不同的应用程序中调用和执行,从而提高代码的组织性、可维护性和可重用性。
FB2功能块的使用说明如下:1.定义功能块:首先,需要定义一个要使用的功能块。
功能块通常包括一个或多个功能,用于执行特定的任务或操作。
功能块的定义应该清晰明了,包括功能的输入和输出,以及功能块的使用方法。
2.导入功能块:在使用功能块之前,需要先导入功能块到你的程序中。
这可以通过在代码中引用功能块的文件或库来实现。
导入功能块后,程序就可以使用功能块中定义的功能了。
3.调用功能块:要使用功能块中定义的功能,需要调用功能块。
这可以通过在程序中调用功能块的函数或方法来实现。
在调用功能块时,需要传递相应的参数,以便功能块执行所需的操作。
4.处理功能块的输出:在调用功能块后,可能会得到一些输出结果。
这些输出可以是值、对象、数组等。
程序可以对输出进行处理,以便根据需要进行后续操作。
5.关闭功能块:在程序使用完功能块后,应该关闭功能块,释放资源和内存。
通过关闭功能块,可以确保程序运行的效率,并避免资源泄漏等问题。
6.测试功能块:在使用功能块之前,应该进行功能块的测试,以确保功能块的正确性和稳定性。
测试功能块可以包括单元测试、集成测试、功能测试等多种方式。
7.优化功能块:在使用功能块时,应该不断优化功能块,以提高性能和效率。
优化功能块可以包括减少功能块的依赖、简化功能块的逻辑、优化功能块的算法等。
总的来说,FB2功能块的使用说明包括定义功能块、导入功能块、调用功能块、处理功能块的输出、关闭功能块、测试功能块和优化功能块等。
通过正确地使用功能块,可以提高程序的组织性、可维护性和可重用性,从而提升程序的质量和效率。
希望上述说明能够帮助你更好地使用FB2功能块,并在程序开发中取得更好的效果。
温度PID自动控制控制功能块FB58使用入门基础
15-1-22Siemens Industry Online Support - Automation Service, Automati on Support, Simatic Service, Simatic Support, Technical Support, Tech nical Consulting 自动化技术 > 自动化技术 > 工业自动化系统 SIMATIC > 工业软件 > 运行软件 > Loadable functionblocks > 标准 PID 控制温度PID控制功能块FB58使用入门1 FB58基本特性介绍在标准库(Libraries/Standard Library/PID Control Blocks)中的PID控制块中提供了两个用于温度控制的功能块FB58和FB59。
其中,FB58用于具有连续或脉冲输入信号的执行器的温度控制器,而FB59用于类似于定位电机的执行器的步进温度控制器。
除了基本的功能之外,FB58还提供P ID的参数自整定功能。
PID功能块是纯软件控制器,相关运算数据存放在相应的背景数据块中,对于不同的回路,应该使用不同的背景数据块,否则会导致PID运算混乱的错误。
FB58可以用在仅加热的温度控制回路(例如控制蒸汽的供给量来控制温度),也可以用在仅冷却的温度控制回路(例如控制冷却风扇的频率、或者冷媒的供给量来控制温度)。
如果用于冷却,则回路工作在反作用状态,则需要给比例增益参数GAIN分配一个负数,其他保持不变。
和常规PID功能块(例如FB/SFB41)对比,FB58具有如下特性:提供控制带(Control Zone)功能;控制输出提供脉冲方式;过程值转换增加对温度信号转换(PV_PER*0.1/0.01)方式的支持;参数保存和重新装载;控制器参数自整定功能;设定值变化时的比例作用弱化功能。
2 FB58基本使用2.1 功能块调用在STEP7中,提供了关于FB58和FB59的一个示例项目,其路径如下图所示:图1 FB58/59示例项目该示例项目包含有如下几个示例程序:(1)连续控制器Continuous controller输出类型是连续数值的一类控制器,其中的FB100和DB100是一个模拟的控制对象;(2)脉冲控制Pulse control OB35, OB1输出类型是单个脉冲信号的一类控制,在OB35和OB1中同时调用,其中的FB10 2和DB102是一个模拟的接收脉冲信号的控制对象;(3)脉冲控制Pulse control OB35, OB32输出类型是单个脉冲信号的一类控制,在OB35和OB32中同时调用,其中的FB1 02和DB102是一个模拟的接收脉冲信号的控制对象。
用S7-300PLC进行PID控制——功能块FB41的功能及用法介绍

用S7-300PLC进行PID控制——功能块FB41的功能及用法介绍一、控制系统假设图1 液压系统控制框图如图1为液压系统的简单控制框图。
控制方式为使用变频器拖动泵,使系统的实际压力等于设定压力。
本文基于此系统,探讨一下如何用S7-300进行PID控制。
为方便讨论,做以下假定:•· 系统压力的可调范围为:0 – 1MPa;•· 变频器的变频范围为:0 – 50Hz;•· 压力传感器的输入外设地址:PIW272;模拟量输出外设地址为PQW288。
二、FB41简介在STEP7中的库中,有专门用于PID控制的FB块——FB41。
PID控制必须在循环中断中执行,以确保其扫描、执行时间基本固定。
本例中的CPU仅有OB35一个循环中断,因此,要在OB35中调用FB41。
图2 FB41在库中的位置图3 FB41的逻辑图FB41的逻辑如图3所示。
分解介绍如下:•· SP_INT端为给定值,本例中即为给定压力,假设为0.5MPa;即:0.5==>'SP_INT';•· 实际值有两条通路可选:· 当PVPER_ON=0时,PV_IN端的值为实际值,该值通常有FC105转换而来;· 当PVPER_ON=1时,PV_PER端的值为实际的压力值,该值来自AI模块,为压力传感器的反馈值;本例中,我们以PVPER_ON=1时,来说明。
即:1==>'PVPER_ON'、PIW272==>'PV_PER'•· PV_FAC、PV_OFF对应压力的范围,即:1==>'PV_FAC'、0==>'PV_OFF'。
•· PV是根据PV_PER计算出的实际压力值。
具体来说:PV_PER=0时,对应的实际压力为PV_OFF,即0MPa;PV_PER=27648时,对应的实际压力为PV_FAC,即1MPa;PV=PV_PER/27648*(PV_FAC –PV_OFF),本例中,PV=PV_PER/27648;•· ER为给定值SP_INT和实际值PV的偏差,PID即是基于它进行调节的;•· GAIN、TI、TD分别为比例、积分、微分的系数。
欧姆龙PLC编程软件中功能块的使用方法
欧姆龙PLC编程软件中功能块的使用方法欧姆龙PLC编程软件也增加了编制功能块的功能软件的功能块功能符合IEC61131–3标准一个功能块调用一个梯形图的例子使用功能块的主要目的是促进良好的结构化编程,功能调用;让复杂的程序创建的代码更少,更易于程序的管理。
一个功能块由块头和块体组成块头—要在功能块程序中使用的数据:作为输入和输出的连接的变量,功能块内部变量,用块内本地参数定义-形参。
块体包含可能的指令,算法-这是功能块每次执行时的实际的代码。
调用中,对应输入和输出变量用实际对应的变量代入。
不是所有的PLC都可以创建功能块。
可以建立功能块欧姆龙PLC:CJ1M,CJ,CS,CP1H/L等;每一类型的PLC能创建的功能块数量是不同的。
在PLC中最多可以定义64个功能块,最多可以写30000条语句。
创建和使用功能块的步骤一、PLC必须是一个有效的PLC类型。
二、是功能块的定义创建。
选择合适的功能块类型:梯形图或结构化文本;新的功能块被创建,它的名称将默认为‘功能块’。
三、是打开功能块进行编辑,包括在块头中设置使用功能块变量;块体使用书面的算法功能块梯形结构化编辑器或文本编辑器编写。
四、创建后的功能块可以在主程序梯图编辑器中调用使用。
如果某具体的功能块已经存在,那么可以从‘FB列表中’选择。
如果没有,创建的功能块只需要输入一个新名称,选择适当的‘FB 列表’定义。
选择的功能块会自动在全局符号表中创建(包括分配在功能块头中定义的每个变量的内存);功能块的调用将在梯形图中显示。
或者选中树型菜单中[功能块],再从下拉菜单[插入]中选择[功能块]有几种形式创建一是从文件中直接导入(后缀.CXF)现有的功能块;选择在编程区适当的单元格中,右键调用,或者使用从[插入]菜单[功能块调用]选项。
FC5 FC6功能块使用

显示订货号图一:设置通信连接FB200运行后,复位M0.3 "START-UP"。
图二OB1"ERROR"和 "STATUS"用来表示同一个循环中通讯完成情况及状态。
图三FB200FC5 "AG_SEND" 调用图四:FB200复位"SND_BUSY" 和保存"STATUS" 。
BYTE 100 。
图5:FB200调用FC6 "AG_RECV""Structure".的变量"STATISTIC"里保存着FB200的这些统计接口参数。
图7:数据类型"Structure" 的统计变量 "STATISTIC"通过变量"#STATISTIC.ON_OFF"可以打开/关掉状态分析。
图8:打开/关闭状态分析建。
S7_300_SEND_RCV.zipScroll down for English:How do you program the communication blocks FC5 and FC6? Display part number6ES7810-4CC08.. SIMATIC S7, STEP7 V5.46GK7342-5.. SIMATIC NET, CP342-5 f. S7-300, Profibus6GK7343-5.. SIMATIC NET, CP343-5 f. S7-300, Profibus6GK73431.. SIMATIC NET, CP 343-1 COMMUNICATIONS PROCESSOR IE Instructions:To communicate using one of the following communication connections, you must call the communication blocks FC5 "AG_SEND" and FC6 "AG_RECV" in the S7 program of the S7-300.•TCP connection•ISO-on-TCP communication (RFC 1006)•ISO transport connection•UDP connection• FDL connectionFeatures of the communication blocks FC5 "AG_SEND" and FC6 "AG_RECV"•FC5 and FC6 are asynchronous communication functions.•In this example, the blocks are called in the OB1 cycle (see also Entry ID: 2795485)•They can run over several OB1 cycles.•The FC5 is activated by the input parameter "ACT".•The end of the job is indicated by "DONE" or "ERROR".•AG_SEND and AG_RECV can communicate simultaneously via one connection.•You will find the communication blocks FC5 "AG_SEND" V4.2 and FC6 "AG_RCV" V4.7 in the SIMATIC_NET_CP library in "CP 300 > Blocks".Describing a sample programThe S7 program contains the call of the communication blocks FC5 "AG_SEND" and FC6"AG_RECV" from the SIMATIC_NET_CP library. The FC5 "AG_SEND" is for sending data to another S7 station, to a PC station, or to a third-party system. The FC6 "AG_RECV" is for receiving data from another S7 station, from a PC station, or from a third-party system.The sample program shows the functions of the communication blocks FC5 "AG_SEND" and FC6 "AG_RCV" using an ISO-on-TCP connection.First create the hardware configuration for your S7-300 station.Note:Configure the Marker byte 10 as clock marker. The send request is triggered by this clock marker. Save and compile the hardware configuration of your S7-300 station and load it into the CPU.The timer resource T10 is used in this sample program.Configure one of the above-mentioned communication blocks for the CPU in NetPro. You can configure a specified communication connection if the communication partners are configured together in a STEP 7 project. If the communication partner is not configured in the same STEP 7 project as the S7-300 station, then an unspecified communication connection is configured. Make sure you award the IP address or PROFIBUS address correctly when you configure thecommunication connection -> tab "General".Fig. 01: Configuring the communication connectionFig. 02: OB1Fig. 03: FB200: Calling the FC5 "AG_SEND"Fig. 04: FB200: Resetting "SND_BUSY" and saving "STATUS" instance: P#DB201.DBX100.0 BYTE 100.Fig. 05: FB200: Calling FC6 "AG_RECV"Fig. 06: FB200: STATUS FC6 and length of the received datathe FB200 in the variable "STATISTIC" of data type "Structure".Fig. 07: Statistical variable "STATISTIC" of data type "Structure"It is possible to switch on/off the STATUS evaluation via the variable "#STATISTIC.ON_OFF. Fig. 08: Switch STATUS evaluation on or offwas created with STEP 7 V5.4 SP3.S7_300_SEND_RCV.zipIMPORTANT!。
OMRON功能块调用
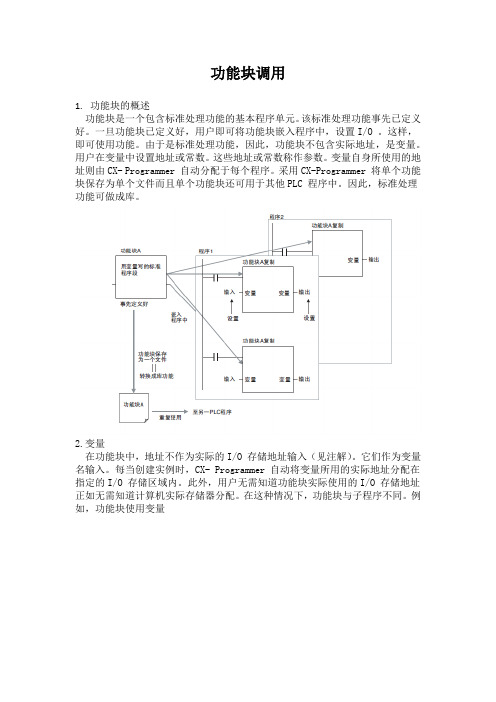
功能块调用1.功能块的概述功能块是一个包含标准处理功能的基本程序单元。
该标准处理功能事先已定义好。
一旦功能块已定义好,用户即可将功能块嵌入程序中,设置I/O 。
这样,即可使用功能。
由于是标准处理功能,因此,功能块不包含实际地址,是变量。
用户在变量中设置地址或常数。
这些地址或常数称作参数。
变量自身所使用的地址则由CX- Programmer 自动分配于每个程序。
采用CX-Programmer 将单个功能块保存为单个文件而且单个功能块还可用于其他PLC 程序中。
因此,标准处理功能可做成库。
2.变量在功能块中,地址不作为实际的I/O 存储地址输入(见注解)。
它们作为变量名输入。
每当创建实例时,CX- Programmer 自动将变量所用的实际地址分配在指定的I/O 存储区域内。
此外,用户无需知道功能块实际使用的I/O 存储地址正如无需知道计算机实际存储器分配。
在这种情况下,功能块与子程序不同。
例如,功能块使用变量可以支持以下变量类型(用法):内部:在实例中只能使用内部变量。
这些内部变量不能直接用来传输数据至I/O 参数或从I/O 参数中上传数据。
输入:输入变量可以从实例外的输入参数中输入数据。
默认输入变量为传输输入条件数据的EN (Enable)变量。
输出:输出变量可以输出数据至实例外的输出参数。
默认输出变量为传输实例执行状态的ENO (Enable Out)变量。
外部:外部变量是事先由CX-Programmer 寄存的系统定义变量(例如,条件标志和一些辅助区域位)或用户定义的全局符号(用于每个实例数中)。
变量具有以下属性:变量名可用来识别功能块中的变量。
如果其他功能块也使用了相同的名称,这也没有什么问题。
注变量名可达30,000 字符长但不得以数字开始。
此外,在一排中,名称不能包含两个下划线字符。
字符串不能与变址寄存器相同。
例如, IR0 到IR15。
在下面数据类型中,选择其中一个作为变量:BOOL、INT、UINT、DINT、UDINT、LINT、ULINT、WORD、DWORD、LWORD,REAL、LREAL、TIMER、COUNTERAT 设置(分配实际地址)将变量设于特殊的I/O 存储地址中而非系统自动分配地址。
EAM系统的基本功能模块

EAM系统的基本功能模块EAM(企业资产管理)系统是一种帮助企业有效管理和优化资产、设备和设施的信息管理系统。
它集成了企业的资产管理、维护管理、采购管理、合同管理、预防性维护、生命周期管理和能源管理等功能模块。
以下是EAM系统的基本功能模块的详细介绍。
1.资产管理模块:资产管理模块用于跟踪、记录和管理企业内部和外部的所有资产,包括设备、机械、电子设备、车辆和其他固定资产。
它可以提供资产清单、资产分布图、资产评估和监控等功能,以便企业了解和掌握资产的状况、位置和价值。
2.维护管理模块:维护管理模块用于计划、安排和跟踪资产和设备的维护活动。
它可以帮助企业制定维护计划、预防性维护和故障维修,实时监控维护进度和维修记录,提供维修费用和绩效指标分析等功能。
3.采购管理模块:采购管理模块用于管理企业资产和设备的采购活动。
它可以帮助企业制定采购计划、发起采购请求、选择供应商、编制采购订单、跟踪交货和支付情况,提供采购合同管理、供应商评价和采购费用分析等功能。
4.合同管理模块:合同管理模块用于管理和跟踪企业与供应商、客户和其他合作方之间的合同。
它可以帮助企业管理合同的签订、到期、续签和变更,提供合同履行情况监控、支付款项和费用分析等功能。
5.预防性维护模块:预防性维护模块用于制定和执行设备和资产的预防性维护计划,以减少设备故障和维修成本,提高设备可靠性和利用率。
它可以帮助企业制定维护任务、计划维护活动、记录维护历史和分析维护效果等功能。
6.生命周期管理模块:生命周期管理模块用于跟踪和管理资产和设备的整个生命周期,从采购到退役。
它可以帮助企业记录资产的购买、入库、领用、使用和报废过程,提供资产价值评估、使用寿命分析和资产处置流程等功能。
7.能源管理模块:能源管理模块用于监控和管理企业的能源消耗和能源效率。
它可以帮助企业实时监测能源数据、分析能源使用情况、发现能源浪费和提供能源节约建议,以降低能源成本和环境影响。
EAM系统的这些基本功能模块可以帮助企业有效管理和优化资产、设备和设施,提高设备的可靠性、可用性和效率,降低维护成本和风险,并为企业的决策提供基于数据的支持。
功能FC和功能块FB的使用

功能FC和功能块FB的使用功能(Functional Capabilities,FC)和功能块(Functional Blocks,FB)是软件开发中常用的概念,用于描述系统的功能和实现方式。
这两个概念可以帮助开发人员更好地组织代码和设计系统,并且在软件开发过程中起到了重要的作用。
下面将详细介绍功能FC和功能块FB的使用。
功能(Functional Capabilities,FC)是系统或软件所提供的一种特定功能或行为。
它描述了系统在特定情况下应具备的能力,可以是一个简单的操作或一个复杂的功能。
FC通常是对系统所需功能的高级描述,它不仅仅包括系统的输入和输出,还包括系统的行为和约束。
FC与用户需求息息相关,它是将用户需求转化为系统所需功能的中间步骤。
功能块(Functional Blocks,FB)是实现功能的基本单元。
一个功能块是具有特定功能的代码块,它接收输入,执行一系列操作,并生成输出。
功能块主要用于将系统的功能划分为更小的模块,以便于开发、维护和重用。
一个复杂的系统通常由多个功能块组成,每个功能块负责一个特定的功能或行为。
通过合理的组织和设计功能块,可以使系统更加模块化、可靠和可扩展。
在实际的软件开发过程中,我们通常会先进行功能分析和需求确定,然后将需求转化为功能,再将功能细化为功能块。
这个过程可以通过以下几个步骤实现:步骤一:功能分析和需求确定。
在这个阶段,我们需要与用户进行沟通,了解他们的需求和期望。
通过与用户的交流,我们可以确定系统所需的功能,并将其记录为功能描述。
步骤二:定义功能。
在功能分析阶段完成后,我们需要将功能描述转化为具体的功能。
例如,如果我们的系统需要实现一个登录功能,我们可以将其定义为一个“登录”功能。
步骤三:细化功能。
在细化功能时,我们需要将每个功能进一步分解为更小的功能块。
这些功能块可以是独立的,也可以依赖其他功能块。
通过细化功能,我们可以更好地组织代码,并确保每个功能块的责任清晰明确。
台达功能块的使用方法
台达功能块的使用方法
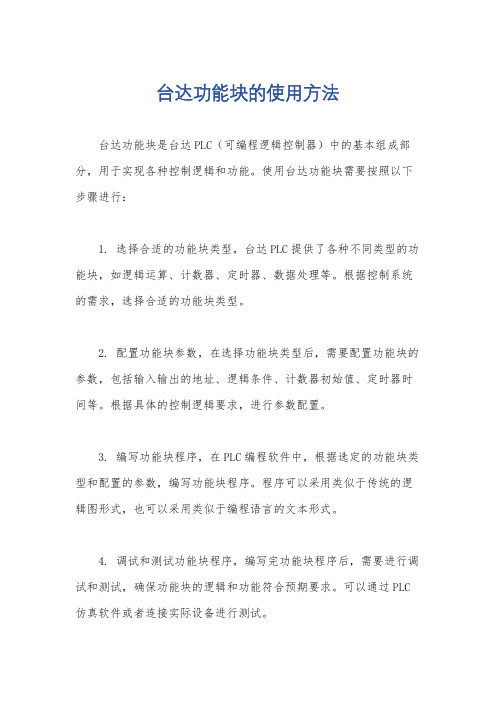
台达功能块是台达PLC(可编程逻辑控制器)中的基本组成部分,用于实现各种控制逻辑和功能。
使用台达功能块需要按照以下步骤进行:
1. 选择合适的功能块类型,台达PLC提供了各种不同类型的功能块,如逻辑运算、计数器、定时器、数据处理等。
根据控制系统的需求,选择合适的功能块类型。
2. 配置功能块参数,在选择功能块类型后,需要配置功能块的参数,包括输入输出的地址、逻辑条件、计数器初始值、定时器时间等。
根据具体的控制逻辑要求,进行参数配置。
3. 编写功能块程序,在PLC编程软件中,根据选定的功能块类型和配置的参数,编写功能块程序。
程序可以采用类似于传统的逻辑图形式,也可以采用类似于编程语言的文本形式。
4. 调试和测试功能块程序,编写完功能块程序后,需要进行调试和测试,确保功能块的逻辑和功能符合预期要求。
可以通过PLC 仿真软件或者连接实际设备进行测试。
5. 部署功能块程序,经过测试无误后,将功能块程序部署到实际的PLC设备中,让其开始运行控制系统。
总的来说,使用台达功能块需要根据实际的控制需求选择合适的功能块类型,配置参数,编写程序,测试调试,最终部署到实际设备中。
这样才能实现对控制系统的精确控制和运行。
2_PID功能块使用基础

PID 功能块使用基础 PID Function Block usage摘要本文档主要用于讨论与PID功能块相关使用的基本问题。
关键词PID;FB41;FB42;FB43;FB58;FB59Key Words PID;FB41;FB42;FB43;FB58;FB59目录PID 功能块使用基础 (1)1.基础部分: (4)1.1自动控制系统分类 (4)1.1.1.开环控制系统 (4)1.1.2.闭环控制系统 (4)1.1.3.阶跃响应 (4)1.1.4. PID控制的原理和特点 (4)1.1.5. PID控制器的参数整定 (5)1.1.6. PID与自适应PID的区别 (6)1.1.7. PI,PD,PID系统的适用范围 (7)2.应用部分: (8)2.1. FB41/42/43/58/59,SFB41/42/43的区别 (8)2.2. Continuous controller与 Step controller的区别 (8)2.3. FB41/42/43/58/59,SFB41/42/43的适用范围 (8)2.4. PID功能块的调用 (9)2.4.1.定时中断与PID功能块采样周期CYCLE的关系 (9)2.4.2.定时中断与PID功能块输出控制精度的关系 (9)2.4.3 PID功能块的初始化 (9)2.4.4. PID功能块的工作模式及模式切换 (9)2.4.5. PID功能块的各主要输入输出变量的定义与关系 (10)2.5.利用PID Control Parameter Assignment进行参数设置 (11)2.6. FB 58的一些使用经验 (15)1. 基础部分:1.1. 自动控制系统分类自动控制系统可分为开环控制系统和闭环控制系统。
1.1.1. 开环控制系统开环控制系统(open-loop control system)是指被控对象的输出(被控制量)对控制器(controller)的输出没有影响。
SIS功能块的使用

4、“数型转换块”——以“整型 DINT”变“实型 REAL”为例
关于该 FBD 作用,举个实例更易于理解: 若 A=1234,经功能块处理后,得到的输出 B=1234.0 注释:关于数据类型长度和特征如下, BOOL 布尔量,1字节长; REAL 单精度型,32位字长; DINT 双整型, 32位字长。
变量类型 INPUT INPUT INPUT INPUT INPUT INPUT INPUT INPUT OUTPUT OUTPUT OUTPUT OUTPUT OUTPUT OUTPUT OUTPUT OUTPUT OUTPUT OUTPUT OUTPUT OUTPUT
参数 RAWSHT MOS_IN DB HH_SP H_SP L_SP LL_SP TRIP_TD RAW_OUT ENG_VALUE HH HH_D H H_D L L_D LL LL_D INV INV_D
类型 REAL BOOL REAL REAL REAL REAL REAL REAL DINT REAL BOOL BOOL BOOL BOOL BOOL BOOL BOOL BOOL BOOL BOOL
说明 仪表上限故障设定值 维护旁路开关 报警/联锁恢复死区, 量程的百分比 (2%) 高高限报警设定值 高限报警设定值 低限报警设定值 低低限报警设定值 联锁报警延时设定值 =RAW_IN(可用于第三方设备通讯) 工程量 高高报警, HH:= MOS_IN OR HH_D 高高报警,报警信息用于第三方通讯 高报警, H:= MOS_IN OR H_D 高报警, 报警信息可用于第三方设备通讯 低报警,L:= MOS_IN OR L_D 低报警,报警信息用于第三方设备通讯 低低报警, LL:= MOS_IN OR LL_D 低低报警, 报警信息用于第三方设备通讯 仪表故障报警, INV:= MOS_IN OR INV_D 故障报警, 报警信息用于第三方设备通讯
FB41 PID功能模块的基本操作
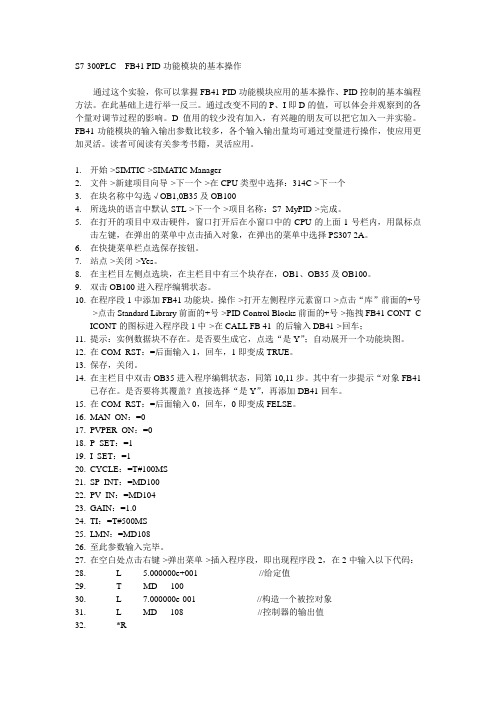
S7-300PLC FB41 PID功能模块的基本操作通过这个实验,你可以掌握FB41 PID功能模块应用的基本操作、PID控制的基本编程方法。
在此基础上进行举一反三。
通过改变不同的P、I即D的值,可以体会并观察到的各个量对调节过程的影响。
D值用的较少没有加入,有兴趣的朋友可以把它加入一并实验。
FB41功能模块的输入输出参数比较多,各个输入输出量均可通过变量进行操作,使应用更加灵活。
读者可阅读有关参考书籍,灵活应用。
1.开始->SIMTIC->SIMATIC Manager2.文件->新建项目向导->下一个->在CPU类型中选择:314C->下一个3.在块名称中勾选√OB1,0B35及OB1004.所选块的语言中默认STL->下一个->项目名称:S7_MyPID->完成。
5.在打开的项目中双击硬件,窗口打开后在小窗口中的CPU的上面1号栏内,用鼠标点击左键,在弹出的菜单中点击插入对象,在弹出的菜单中选择PS307 2A。
6.在快捷菜单栏点选保存按钮。
7.站点->关闭->Yes。
8.在主栏目左侧点选块,在主栏目中有三个块存在,OB1、OB35及OB100。
9.双击OB100进入程序编辑状态。
10.在程序段1中添加FB41功能块。
操作->打开左侧程序元素窗口->点击“库”前面的+号->点击Standard Library前面的+号->PID Control Blocks前面的+号->拖拽FB41 CONT_C ICONT的图标进入程序段1中->在CALL FB 41 的后输入DB41->回车;11.提示:实例数据块不存在。
是否要生成它,点选“是Y”;自动展开一个功能块图。
12.在COM_RST:=后面输入1,回车,1即变成TRUE。
13.保存,关闭。
14.在主栏目中双击OB35进入程序编辑状态,同第10,11步。
SDH原理

② 复用器类型II.1和II.2能够将若干STM-N 信号汇接成单个STM-M(M>N),这样能够使各类 低速信号进入高速线路进行传输。 ③ 复用器类型III.1和III.2,又称为分插复用 器,它能够利用其内部的时隙交换功能,实现带宽 管理,即允许STM-M信号之间的不同VC实现互联, 其功能相当于一个小型交换连接设备。利用 ADM设备可以构成各种自愈环,应用于用户接入 网、市内局间中继网以及长途网中,这部分内容 将在第四章中进行介绍。
7.高阶通道终端功能(HPT)
高阶通道终端功能是高阶通道开销的 源和宿,即在构成STM-N净负荷过程中加 入高阶通道开销(POH),而在分解过程 中则取出POH。其功能图如图3-7所示。
图3-7 高阶通道终端功能
8.高阶通道适配功能(HPA)
高阶通道适配功能所完成的是高阶通 道与低阶通道之间的组合和分解以及指针 处理等项工作。即在复用和解复用过程中, 当信号经过HPA时,在此将分别进行字节 间插处理和消间插处理、指针的插入和取 出操作,从而实现VC-12与C-3/4之间的 复用、解复用功能。
二、 再生器终端(1)
此时在RST(1)的参考点B(1)处所接收的是再 生的STM-1数据,该信号在再生器定时发生器输 出的相关定时信号的作用下,首先从再生的 STM-1中恢复出帧定位字节A1A1A1A2A2A2,以 识别帧的起始位置,然后对除帧结构中第一行的 字节外的整个帧信息进行解扰码处理,同时提取 RSOH字节,并通过U1参考点送给OHA(开销插 入功能块)进行处理,而带有定时的STM-1信号, 经C参考点直接送入RST(2)。
低阶通道终端功能是低阶通道开销的 源和宿,即在构成TU支路信号过程中,加 入低阶通道开销,而在分解过程中,取出
汇川plc中功能块的使用
汇川plc中功能块的使用## English Answer:Function Blocks in Huichuan PLCs.Function blocks are reusable software modules that encapsulate a specific functionality or behavior. They provide a structured and modular approach to programming PLCs, making it easier to develop and maintain complex control systems.Types of Function Blocks.Huichuan PLCs support various types of function blocks, including:Basic function blocks: Perform simple operations like arithmetic, logical, and comparison.Communication function blocks: Handle data exchangewith other devices or networks.Control function blocks: Implement control algorithms, such as PID controllers and motion control.User-defined function blocks: Created by users toextend the functionality of the PLC.Structure of a Function Block.A function block in Huichuan PLCs typically consists of:Instance name: A unique identifier for the function block.Inputs: Parameters that receive data from other logic elements.Outputs: Parameters that provide data to other logic elements.Code: The logic that defines the function block'sbehavior.Using Function Blocks.Function blocks are used in Huichuan PLCs by:1. Creating an instance: Each function block is defined only once in the library, but can be used multiple times by creating instances.2. Connecting inputs and outputs: The inputs and outputs of the function block are connected to other logic elements, such as variables, constants, or other function blocks.3. Configuring parameters: Some function blocks have configurable parameters that can be set during programming.Advantages of Using Function Blocks.Function blocks offer several advantages:Code reusability: Function blocks can be reused in different programs, reducing development time and effort.Modularity: Function blocks enable the decomposition of complex programs into smaller, manageable units.Encapsulation: Function blocks hide implementation details, making code more understandable and maintainable.Consistency: Function blocks provide a standardized way of implementing common functionalities, ensuring consistency across different programs.## 中文回答:汇川PLC中的功能块。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基本逻辑功能块的使用
1)、算术运算符
ADD(加)、SUB(减)、MUL(乘)、DIV(除)
2)、位串运算符
AND(与)、OR(或)、NOT(非)
3)、选择运算符
SEL(选择)、MAX(二取大)、MIN(二取小)、LIMIT(限幅)、MUX(多选一)
4)、比较运算符
GT(大于)、LT(小于)、LE(小于等于)、GE(大于等于)、EQ(等于)、NE(不等于)
5)、数据类型转换运算符
BOOL_TO_INT、BYTE_TO_BOOL、REAL_TO_INT、
LREAL_TO_REAL
6)、延时器(Timer)功能(软时间继电器功能)
TP(脉冲) TON(延时闭合) TOF(延时断开)
6.1TP讲解
TP(IN,PT,Q,ET):IN和Q都是BOOL类型的,PT,ET都是TIME 类型的。
如果IN是FALSE,Q是FALSE,ET是0.
如果IN是TRUE并且ET小于等于PT,Q是TRUE。
否则,Q是FALSE 。
该功能块能产生一个单脉冲信号,常用于将一开关量信号转换成一个高电平脉冲信号,脉冲信号宽度时间最长为设置的PT时间(如果开关量在此时间内从1变为0,则脉冲宽度与开关量从1变为0的时间相同,这里修正了软件自带帮助说明中的时序图错误)。
6.2TON(延时闭合)
TON(IN,PT,Q,ET):IN,Q是BOOL类型,PT,ET是TIME类型。
如果IN是FALSE,Q是FALSE,ET为0.当IN变成TRUE时,ET以毫秒记数直到ET等于PT.然后保持常熟。
当IN是TRUE并且ET 等于PT时,Q是TRUE。
否则Q为FALSE.
该功能块常用于电机的延时启动,数字开并的防抖处理(即用作数字开关量的滤波功能)。
延时时间为PT引脚输入值。
IN脚引入的开关信号如果为1(TRUE),最少要经过PT时间的确认,才能输出1(TRUE)。
强调的是输出为1(TRUE)时的效果。
7)、触发器(Trigger)
R_TRIG上升沿触发器仅产生一个扫描周期的1(TRUE)信号,如果输入引脚CLK引入的信号发生了从0到1的变化。
F_TRIG下降沿触发器仅产生一个扫描周期的1(TRUE)信号,如果输入引脚CLK引入的信号发生了从0到1的变化。
功能块经常应用于判断信号或条件是否发生了变化、作一次记录,某种数据值进行一次有效的传送后保持不变。
8)、双稳态功能块(置位与复位功能块)
R(复位)、S(置位)、RS(复位置位)、SR(置位复位)
RS(复位置位)或SR(置位复位)在使用功能上一样,只是根据逻辑要求哪个优先而已。
RS是复位优先功能,SR是置位优先功能,即二个引脚同时得到信号时,输出信号以优先的那个为准。
R(复位)、S(置位)功能块,常与脉冲信号一同使用,是将脉冲信号变换位0或1进行应用的一种手段。
置位与复位功能应成对使用。
复杂的逻辑控制中,因少用了复位信号功能造成的逻辑问题是常见的故障现象。
PID定义:HSPID01: HSPID := (PT:=80,TI:=150,SV:=100,KD:=1,TD:=5,DI:=0,OT:=100,OB:=0,OU: =5,DL:=20,MU:=100,MD:=0,PK:=0,OM:=0,AD:=1,TM:=TRUE,RM: =0,ME:=TRUE,AE:=TRUE,CE:=FALSE,TE:=FALSE,FE:=TRUE,A V:=0,MC:=0,PU:=100,PD:=0,CP:=0.5); (*1#反应釜冷却水调节*)
SCS定义:SCS01: HSSCS5:= (RT:=60,DE:=0,SC:=FALSE,CM:=TRUE,OS:=TRUE,CS:=TRUE,O U:=FALSE,L4:=TRUE,L5:=TRUE); (*A喷淋切断阀*)
局部变量
在关键词VAR和END_VAR之间声明的变量都是程序的局部变量。
它们没有外部的联系;换句话来说,它们不能在本程序之外被调用。
变量声明的对话框
可以选择定义成局部变量(VAR),输入变量(VAR_INPUT),输出变量(VAR_OUTPUT),输入输出变量(VAR_INPUT),还是全局变量(VAR_GLOBAL)。
声明为表格
在“工程”“选项”“编辑器”类下的选项对话框里如果声明为表被选中,声明编辑器看起来象一个表。
如同在卡索引对话框中,你可选择每个变量类型的选项卡并编辑变量。
对每一个变量你被给出下列字段。
Name: 输入变量标识符
Address: 如果必要,输入变量的地址(AT声明)(AT声
明)
Type: 输入变量的可能初始化值(在“:=”复值符之后)
Initial: 输入变量的可能初始化值(在“:=”复值符之后)
Comment: 输入一个注释。