搜索策略.
网络搜索技巧:如何利用搜索策略提高搜索效果?(四)

网络搜索技巧:如何利用搜索策略提高搜索效果?在当今信息爆炸的时代,我们经常需要从海量的信息中找到我们所需要的具体内容。
网络搜索引擎成为了我们最重要的工具之一。
然而,如何提高搜索效果,找到最相关的信息却是一个常常困扰着我们的问题。
本文将介绍几个实用的网络搜索技巧,帮助您更好地利用搜索策略,提高搜索效果。
1. 使用引号进行精确搜索在进行搜索时,我们可以使用引号来限制搜索项的范围,从而得到更加精确的搜索结果。
例如,如果我们想搜索关于“夏威夷旅游”的相关信息,我们可以将搜索项用双引号包围起来,这样搜索引擎将会只返回包含完整短语“夏威夷旅游”的结果,而不是返回包含夏威夷和旅游两个独立的关键词的结果。
这样可以有效地缩小搜索范围,提高搜索效果。
2. 使用布尔运算符进行组合搜索在搜索过程中,我们经常遇到需要组合多个关键词进行搜索的情况。
此时,使用布尔运算符可以帮助我们更好地控制搜索条件,准确获取到所需信息。
常用的布尔运算符有“与”、“或”和“非”。
使用“与”运算符可以让搜索引擎返回包含同时包含两个关键词的结果;使用“或”运算符可以让搜索引擎返回包含其中一个关键词的结果;而使用“非”运算符可以排除某个关键词,从而去除与该词相关的结果。
通过合理运用布尔运算符,我们可以筛选出更加相关的搜索结果。
3. 利用高级搜索选项进行进一步精确搜索除了基本的关键词搜索外,许多搜索引擎还提供了高级搜索选项,可以帮助我们进行更加深入的搜索。
例如,我们可以根据文件类型、网站、发布日期等信息来筛选搜索结果。
选择合适的高级搜索选项可以更好地满足我们的搜索需求,快速找到我们想要的内容。
4. 利用站内搜索功能针对特定网站进行搜索有时候,我们只想在某个特定的网站中进行搜索,而不是在整个互联网上搜索。
许多网站提供了站内搜索功能,可以帮助我们快速找到该网站上的特定内容。
在搜索引擎中,我们可以通过使用"site:"命令,加上目标网站的域名和关键词,来实现针对特定网站的搜索。
第3章 搜索策略
总费用 操作费用 控制费用
小 ←─── 启发式信息量 ───→ 大
搜索的费用
一般地,盲目搜索算法需要搜索的空间比较大, 因而,其操作的费用较高;而启发式搜索算法的控制 策略比较复杂,因而,其控制的费用较高。 一方面,启发式信息利用程度越高,问题的搜索 空间越小,操作的费用越低。另一方面,启发式信息 利用程度越高,控制策略越复杂,控制的费用越高。 操作费用与控制费用的这种辨证关系对于我们设 计或选择图搜索算法具有指导意义。
搜索的策略和算法
在状态图(树)中,寻找由起始节点通向目标节点的 路径可以有各种不同的搜索策略。不同的策略以不同的方 式控制着搜索的过程。因此,搜索策略又称控制策略。 与问题相关的信息往往能帮助我们进行更为有效的搜 索,当然,这取决于相关信息的质和量。依据控制策略利 用与问题相关信息的情形来对图搜索算法进行分类,可将 其分为: (1) 盲目搜索算法 (Blink Search) (2) 启发式搜索算法 (Heauristic Search)
搜索的相关定义
开节点(open node):未进行扩展操作的节点; 闭节点(closed node) :已进行扩展操作的节点;
扩展节点(expended node):已进行扩展操作,并生长 出子结点的节点;
死节点(dead node):闭节点,但不是扩展节点; 叶节点(leaf node):无子节点或未生成子节点的节点。
深,搜索图上的节点数将成几何级数地增长,这意
味着,对于大的问题,宽度优先搜索算法需要巨大 的记忆体或存储空间。
A
B
C
D
宽度优先搜索
K
E
F
G
H
I
J
L
M
搜索策略

6.1.3 与/或树表示法
与/或树是用于表示问题及其求解过程的另一种方法,通 常用于表示比较复杂问题的求解。 对于一个复杂问题,直接求解往往比较困难。此时可通过 下述方法进行简化:
分解 把一个复杂问题分解为若干个较为简单的子问题,每个子问题又 可继续分解。重复此过程,直到不需要再分解或者不能再分解为 止。如此形成“与”树。 等价变换 利用同构或同态的等价变换,把原问题变换为若干个较为容易求 解的新问题。如此形成“或”树。
2,3 3,3 1,3 1,2 3,2 A(3,2) 2,2
采用状态空间表示方法,首先要把问题的一切状态都表示出 来,其次要定义一组算符。 问题的求解过程是一个不断把算符作用于状态的过程。如果 在使用某个算符后得到的新状态是目标状态,就得到了问题 的一个解。这个解就是从初始状态到目标状态所采用算符的 序列。使用算符最少的解称为最优解。 对任何一个状态,可使用的算符可能不止一个。这样由一个 状态所生成的后继状态就可能有多个。此时首先对哪一个状 态进行操作,就取决于搜索策略。
7. 8.
按某种搜索策略对OPEN表中的节点进行排序; 转第2步。
一些说明
一个节点经一个算符操作后一般只生成一个子节点。但适用于 一个节点的算符可能有多个,此时就会生成一组子节点。这些 子节点中可能有些是当前扩展节点的父节点、祖父节点等,此 时不能把这些先辈节点作为当前扩展节点的子节点。 一个新生成的节点,它可能是第一次被生成的节点,也可能是 先前已作为其它节点的子节点被生成过,当前又作为另一个节 点的子节点被再次生成。此时,它究竟应选择哪个节点作为父 节点?一般由原始节点到该节点的代价来决定,处于代价小的 路途上的那个节点就作为该节点的父节点。 在搜索过程中,一旦某个被考察的节点是目标节点就得到了一 个解。该解是由从初始节点到该目标节点路径上的算符构成。 如果在搜索中一直找不到目标节点,而且OPEN表中不再有可 供扩展的节点,则搜索失败。 通过搜索得到的图称为搜索图,搜索图是状态空间图的一个子 集。由搜索图中的所有节点及反向指针所构成的集合是一棵树, 称为搜索树。根据搜索树可给出问题的解。
搜索策略概述
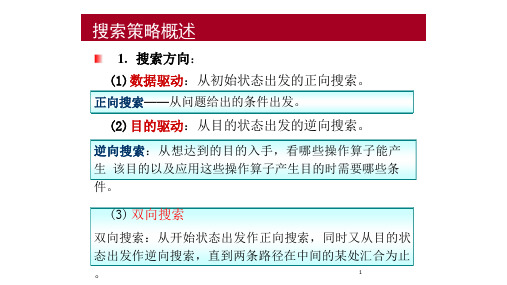
1. 搜索方向: (1)数据驱动:从初始状态出发的正向搜索。
正向搜索——从问题给出的条件出发。
(2)目的驱动:从目的状态出发的逆向搜索。
逆向搜索:从想达到的目的入手,看哪些操作算子能产 生 该目的以及应用这些操作算子产生目的时需要哪些条 件。
(3) 双向搜索
双向搜索:从开始状态出发作正向搜索,同时又从目的状
态出发作逆向搜索,直到两条路径在中间的某处汇合为止
。
1
搜索策略
2. 盲目搜索与启发式搜索: 1 盲目搜索:在不具有对特定问题的任何有关信
息的条件下,按固定的步骤(依次或随机调用 操 作算子)进行的搜索。 2 启发式搜索:考虑特定问题领域可应用的知识, 动态地确不必要的搜索,以求尽 快地到达结束状态。
2
搜索引擎优化(SEO)策略

搜索引擎优化(SEO)策略搜索引擎优化(SEO)是一种通过优化网站内容和结构,提高网站在搜索引擎结果页面(SERP)中的排名,从而增加网站流量和曝光度的策略。
在当今竞争激烈的互联网时代,SEO已经成为了各个企业和个人网站必备的营销手段。
本文将介绍一些常用的SEO策略,帮助您提升网站的排名和曝光度。
一、关键词研究和优化关键词是用户在搜索引擎中输入的词语,也是搜索引擎判断网页内容和排名的重要指标。
因此,关键词研究和优化是SEO策略中的重要一环。
1.1 关键词研究在进行关键词研究之前,首先需要明确网站的主题和目标受众。
然后,通过使用一些关键词研究工具,如Google AdWords关键词规划工具、百度指数等,来寻找与网站主题相关的高搜索量和低竞争度的关键词。
这些关键词将成为网站内容优化的基础。
1.2 关键词优化关键词优化是指在网站的标题、描述、正文和链接等位置合理地使用关键词,以提高网站在搜索引擎中的排名。
在进行关键词优化时,需要注意以下几点:(1)标题优化:将关键词尽量放在标题的前面,使其更容易被搜索引擎识别。
(2)描述优化:在网页的meta标签中添加关键词相关的描述,以吸引用户点击。
(3)正文优化:在网页正文中自然地使用关键词,但不要过度堆砌,以免被搜索引擎认定为垃圾信息。
(4)链接优化:在网站内部和外部链接中使用关键词,增加关键词的权重。
二、网站结构优化网站结构是指网站的布局和导航方式。
一个良好的网站结构可以提高用户体验和搜索引擎的抓取效率,从而提高网站的排名。
2.1 网站布局网站布局应该简洁明了,使用户能够轻松找到所需的信息。
同时,网站布局也应该符合搜索引擎的抓取规则,使搜索引擎能够快速地索引网站的内容。
2.2 导航方式网站的导航方式应该清晰明了,使用户能够快速找到所需的页面。
同时,导航链接也应该包含关键词,以增加关键词的权重。
三、内容优化内容是网站的核心,也是吸引用户和搜索引擎的重要因素。
因此,优化网站内容是SEO策略中的关键一环。
搜索策略相关知识讲义

搜索策略相关知识讲义策略是指在进行信息和信息检索时采用的一系列方法和技巧。
在互联网时代,策略的重要性愈发凸显。
精确的策略可以帮助我们高效地获取所需信息,节省时间,提高效率。
以下是一份关于策略的相关知识讲义。
一、引擎的基本原理和使用技巧1.1引擎的基本原理:介绍引擎的工作原理,包括爬虫、索引和排名等流程。
1.2 常用的引擎:介绍常见的引擎,如Google、百度、必应等,以及各自的特点和使用技巧。
1.3语法:介绍引擎的高级语法,如通配符、逻辑运算符、引号等,帮助用户更精确地所需信息。
二、关键词选择和优化2.1关键词的选择:介绍如何选择合适的关键词,如使用具体和明确的关键词,使用同义词和近义词等。
2.2关键词的优化:介绍如何在中使用关键词,如将关键词放在标题、正文和链接中,提高引擎对相关性的识别。
三、结果的评估和筛选3.1结果的评估:介绍如何评估结果的质量,如查看网站的可信度、权威性和更新性等。
3.2结果的筛选:介绍如何筛选结果,如使用工具、过滤器和高级选项等,以减少不相关的结果。
四、使用专业工具和数据库4.1 学术引擎和数据库:介绍各类学术引擎和数据库,如谷歌学术、PubMed等,以及其特点和使用方法。
4.2行业工具和数据库:介绍各类行业专用的工具和数据库,如专利数据库、商业情报数据库等,以及其搜素策略和使用技巧。
五、其他策略和技巧5.1高级:介绍如何使用高级选项和筛选器,精确所需信息。
5.3反向:介绍如何使用反向,通过已有信息查找相关的信息。
5.4手动:介绍如何通过查阅参考书、刊物和实体图书馆等方式进行手动,获取特定领域的专业信息。
六、策略的实践案例和练习通过实际案例和练习,帮助学习者掌握策略和技巧,并提高其效果。
策略相关知识讲义在互联网时代的信息获取中扮演着重要的角色。
通过学习引擎的基本原理和使用技巧,掌握关键词选择和优化的方法,以及结果的评估和筛选的技巧,可以帮助我们更高效地获取所需信息。
此外,学习专业工具和数据库的使用方法,掌握其他策略和技巧,也能够提高效果。
搜索技巧和策略
1.关键词的选取(1)准确表达需要搜索内容的关键词如:要搜索“张三”,+班级再+学校,以缩小搜索范围,避免很多无关内容。
(2)拆分关键词关键词很长,可拆成几个关键词来搜索,词与词之间用空格隔开。
如:要查找有关“如何在中学物理教学中更好地应用探究式教学方法”,用百度搜索只找到为数不多的相关网页。
这时,可以对关键词进行拆分,找出重要的关键词如“中学物理教学”、“探究式教学方法”。
例:考试:手机上网搜试题,再找答案…2、基本搜索语法(1)+、空格、and:表示逻辑“与”操作指“既包含…又包含…”。
(2)-、not:表示逻辑“非”操作指包含…而不包含…,如“中考物理试题–选择题”注意:这里的“+”和“-”号,是英文字符,而不是中文字符的“+”和“-”。
此外,操作符与作用的关键字之间,不能有空格。
(3)or、|:表示逻辑“或”操作表示前后两个词是"或"的逻辑联系。
(4)巧用双引号精确查找双引号的作用是缩小搜索范围,实现精确搜索。
如:查找“探究式教学”,不用双引号会找到很多与“探究”、“教学”等词相关的网页,而我们要查找的“探究式教学”本身就是一个完整的术语,所以在搜索时避免那些把术语分开来看待的无关网页,就可以在关键词“探究式教学”上加上双引号引起来。
3、常用高级搜索1、【mp3】命令mp3命令在查询音乐的下载试听地址,如想搜寻歌曲“同桌的你”的下载试听地址,就能够够输出“mp3:同桌的你”查询。
2、【intitle】命令intitle的含义在于搜寻网页标题中含有的关键词,例如想搜寻标题中含有“庐江中学”的方式,就搜寻intitle:庐江中学,就会搜寻到网页标题中含有“庐江中学”关键词的网页。
3、【inurl】命令inurl命令在于查询网址中含有的关键词,如搜寻网址中含相关键词“ljzx”的词语,就能够输出“inurl:ljzx”查询。
4、Site:表示搜索结果局限于某个具体网站或者网站频道,或者是某个域名。
搜索策略 Search strategy

例题1:求100以内的所有素数
分析:只要使用2到该数的平方根之间的所有数去除这个 数,就可以判断其是否是素数。 方法一:分析:只要使用2到该数的平方根之间的所有数 去除这个数,就可以判断其是否素数。(for 循环判断是否 为素数、利用flag作标志) 方法二、(用while循环来判断素数)分析:我们可对100- ( while ) 100 200之间的每一整数进行判断,判断它是否为素数,是则 输出。而对于任意整数i,根据素数定义,我们从2开始, 到 ,找i的第一个约数。若找到第一个约数,则i必然不是 素数。否则i为素数。源程序如下: while (x<=trunc(sqrt(i)))and(i mod x<>0)do x:=x+1; 方法三、筛选法:把不符合条件的筛选掉,剩下的就是需 要的。分析:用数组A[100]存放100个自然数,I从2开始循 环,当A[I]>0时,J从I+1开始循环,只要A[J]是I的倍数, 就置A[J]为0,最后数组中大于0的都是素数。
分析:
枚举法 解法:把鸡的头数、脚数与兔子的头数、 脚数列表一一对应,最后查出鸡有多少, 兔有多少。
源代码:
var j,t:integer; begin for j:=1 to 100 do for i:=1 to 100 do if (j+t=30)and(j*2+t*4=90) then write('ji:',j,' zhi tu:',t,' zhi') end.
源代码:
Var n,k,i:byte; ans,s:longint; a:array[1..20] of longint; Procedure prime(s:longint); Var i:integer; Begin i:=2; While (sqr(i)<=s) and (s mod i<>0) do inc(i); If sqr(i)>s then inc(ans) end; Procedure dfs(I,m:byte); Var j:byte; Begin for j:=m to n-k+I do
搜索的策略

1 搜索策略搜索策略是指在搜索过程中如何选择扩展节点的次序问题。
一般来说,搜索策略就是采用试探的方法。
它有两种类型:一类是回溯搜索,另一类是图搜索策略。
2 盲目的图搜索策略图搜索策略又可分为两种:一种称为盲目的图搜索策略,或称无信息图搜索策略;而另一种称为启发式搜索策略,又称为有信息的图搜索策略。
最常用的两种无信息图搜索策略是宽度优先搜索和深度优先搜索。
2.1 宽度优先搜索它是从根节点(起始节点)开始,按层进行搜索,也就是按层来扩展节点。
所谓按层扩展,就是前一层的节点扩展完毕后才进行下一层节点的扩展,直到得到目标节点为止。
这种搜索方式的优点是,只要存在有任何解答的话,它能保证最终找到由起始节点到目标节点的最短路径的解,但它的缺点是往往搜索过程很长。
2.2 深度优先搜索它是从根节点开始,首先扩展最新产生的节点,即沿着搜索树的深度发展下去,一直到没有后继结点处时再返回,换一条路径走下去。
就是在搜索树的每一层始终先只扩展一个子节点,不断地向纵深前进直到不能再前进(到达叶子节点或受到深度限制)时,才从当前节点返回到上一级节点,沿另一方向又继续前进。
这种方法的搜索树是从树根开始一枝一枝逐渐形成的。
由于一个有解的问题树可能含有无穷分枝,深度优先搜索如果误入无穷分枝(即深度无限),则不可能找到目标节点。
为了避免这种情况的出现,在实施这一方法时,定出一个深度界限,在搜索达到这一深度界限而且尚未找到目标时,即返回重找,所以,深度优先搜索策略是不完备的。
另外,应用此策略得到的解不一定是最佳解(最短路径)举例BFS搜索的一般过程。
POJ 2251Dungeon Master#include<iostream>#include<stdio.h>#include<algorithm>#include<queue>using namespace std;#define MMax 31struct node//入队的每个节点的信息{int x,y,z,t;};char map[MMax][MMax][MMax];int r,c,l;node start,end;//上,下,左,右,前,后六个方向,三维地图的搜索intdis[6][3]={{0,0,1},{0,0,-1},{0,1,0},{0,-1,0},{1,0,0},{-1,0,0}};/*二维的有左,右,前,后方向:int dis[4][2]={{0,1},{0,-1},{1,0},{-1,0}}*//*当然,还有相应的八个方向的搜索什么的,修改一下dis就可以了*/bool judge(node a)//判断节点a有无越界{return(a.x>=0&&a.x<l&&a.y>=0&&a.y<r&&a.z>=0&&a.z<c);}int bfs(){node now,next;queue<node>Q;//申请一个结构体node类型的队列Qstart.t=0;//开始节点Q.push(start);//开始节点入队map[start.x][start.y][start.z]='#';//标记while(!Q.empty())//判断队是否为空,空返回true{now=Q.front();//出队一个节点给nowQ.pop();//删除队头元素/*上面两个一般是连起来用的*/for(int i=0;i<6;i++)//枚举6个方向{//next为该方向要搜的那个点next.x=now.x+dis[i][0];next.y=now.y+dis[i][1];next.z=now.z+dis[i][2];if(judge(next)&& map[next.x][next.y][next.z]!='#')//条件{next.t=now.t+1;if(map[next.x][next.y][next.z]=='E')//搜到了return next.t;map[next.x][next.y][next.z]='#';//标记Q.push(next);//入队}}}return-1;}int main(){//freopen("D://1.txt","r",stdin);while(scanf("%d%d%d",&l,&r,&c)!=EOF){if(l+r+c==0)break;for(int i=0;i<l;i++){for(int j=0;j<r;j++){//cin>>map[i][j];scanf("%s",map[i][j]);for(int k=0;k<c;k++){if(map[i][j][k]=='S')start.x=i,start.y=j,start.z=k;//开始节点else if(map[i][j][k]=='E')end.x=i,end.y=j,end.z=k;//}}}int ans=bfs();if(ans==-1)printf("Trapped!\n");else printf("Escaped in %d minute(s).\n",ans);}return0;}。
人工智能搜索策略

通过强化学习技术,让搜索引擎在与用户互动中不断优化自身的搜 索策略,提升用户体验。
知识图谱驱动的搜索策略
借助知识图谱技术,理解实体之间的关系,为用户提供更精准的搜 索结果和推荐。
多智能体协同搜索技术探讨
多智能体系统架构
设计高效的多智能体系统架构,实现智能体之间的协同和信息共 享,提高搜索效率。
IDA*算法优化技巧
迭代加深
01
通过限制搜索深度,逐步增加深度限制,以实现迭代加深搜索,
提高搜索效率。
启发式函数优化
02
针对具体问题领域,设计更为有效的启发式函数,以提供更准
确的搜索指导。
剪枝策略
03
在搜索过程中,根据问题特性采用剪枝策略,如可行性剪枝、
最优性剪枝等,以减少无效搜索。
性能评估与对比分析
目的
搜索策略的主要目的是在给定的问题 空间内,通过智能地选择和探索可能 的解决方案,以最高效的方式找到问 题的最优解或近似最优解。
常见搜索策略类型
盲目搜索
包括深度优先搜索、广度优先搜 索等,这类策略在搜索过程中不 依赖任何问题特定的信息,而是 按照某种固定的模式进行搜索。
启发式搜索
如A*搜索、模拟退火算法等,这 类策略在搜索过程中会利用一些 与问题相关的启发式信息来指导 搜索方向,从而加速搜索过程并
04 遗传算法在搜索中应用
遗传算法基本原理介绍
遗传算法是一种模拟生物进化过 程的优化算法,通过模拟自然选 择和遗传学原理来搜索问题的最
优解。
遗传算法从一组随机生成的初始 解开始,通过不断迭代进化,逐
步逼近问题的最优解。
遗传算法采用适应度函数来评价 每个解的优劣,并根据适应度大 小进行选择、交叉和变异等操作,
状态图各种搜索策略的分类体系

状态图各种搜索策略的分类体系
搜索策略的分类体系可以按照搜索引擎查询时的操作方法和目标来划分。
以下是一些常见的搜索策略分类:
1. 基本搜索策略:
- 关键词搜索:在搜索引擎中输入关键词或关键词组合。
- 精确搜索:使用引号将多个关键词组合成短语进行搜索。
- 排除搜索:使用减号(-)将不想要的关键词排除在搜索结果之外。
- 竖线搜索:使用竖线(|)将多个关键词组合起来,在搜索结果中同时显示多个关键词的相关信息。
2. 高级搜索策略:
- 文件类型搜索:限定搜索结果为特定文件类型,如PDF、PPT等。
- 网站搜索:在搜索关键词之后加上"site:"指定搜索特定的网站或域名下的内容。
- 时间范围搜索:限定搜索结果在指定的时间范围内。
- 地区搜索:在搜索结果中限定特定地理区域的信息。
- 关联搜索:在搜索结果中寻找与特定网页或文档相关的信息。
3. 深度搜索策略:
- 引用搜索:在搜索结果中找到引用或引用自特定网页或文档的信息。
- 相似搜索:根据已有的搜索结果找到类似或相关的信息。
- 图片搜索:使用图片来搜索与之相关的信息。
- 视频搜索:使用视频来搜索与之相关的信息。
这些是常见的搜索策略分类,当然还有其他更多的搜索策略可以根据实际需求进一步探索和应用。
5种有效的搜索引擎优化策略
5种有效的搜索引擎优化策略1. 引言随着互联网技术的飞速发展,搜索引擎优化(SEO)变得越来越重要。
SEO是一种提高网站在搜索引擎结果页(SERP)中排名的技术。
在这篇文章中,我们将重点介绍5种有效的SEO策略。
2. 关键字研究关键字研究是SEO中最重要的一步。
通过了解人们在搜索引擎中使用哪些关键字,您可以确定哪些关键字应该优化以提高排名。
使用关键字工具,如Google Keyword Planner或SEMrush,可以找到与您的网站相关的热门关键字。
一旦您找到了合适的关键字,您可以将它们放入您的网站标题、meta描述、H1和内容中。
确保您的内容是高质量的,与您的关键字相关。
此外,注意不要过度使用关键字,否则您的网站可能会被搜索引擎视为垃圾邮件。
3. 内部链接内部链接是指在您的网站中创建链接以连接不同页面的过程。
内部链接可以改善您的网站导航,并使搜索引擎更好地了解您的网站结构。
使用内部链接可以帮助您的网站获得更高的排名,并促进用户在您的网站上花更多的时间。
另外,内部链接还有助于传播页面的权重,从而使整个网站获得更高的排名。
4. 外部链接外部链接是指其他网站链接到您的网站的过程。
获得高质量的外部链接对于提高排名很重要,因为搜索引擎认为外部链接是对您网站内容的认可。
要获得高质量的外部链接,您可以使用博客、社交媒体和其他营销渠道来推广您的网站。
此外,您还可以向其他网站所有者发送电子邮件,请求他们链接到您的网站。
但是,记住不要购买链接或使用“黑帽”方法获得链接,否则您的网站将面临惩罚。
5. 移动优化在当前的数字时代,移动优化至关重要。
搜索引擎更喜欢移动友好的网站,并倾向于将它们排在移动搜索结果的顶部。
要优化您的网站以适应移动设备,您需要确保您的网站在移动设备上易于阅读和导航。
另外,您还应该确保您的网站速度快,这对于提高排名也很重要。
6. 结论SEO是一个需要耐心和时间的过程。
通过使用上述5种策略,您可以提高网站在搜索引擎结果页中的排名,并增加流量和转化率。
搜索策略讲义课件
s k0 = 2 s k0 = 3 s k0 = 1 s k0 = 3 s k0 = 1 s k0 = 2 s k1 = 2 s k1 = 3 s k1 = 1 s k1 = 3 s k1 = 1 s k1 = 2
17
第七章 搜索策略
根本概念 状态空间的搜索策略 与/或图的搜索策略 博弈树搜索
➢ 7.1.2 状态图表示法
P
P1
P2
P3
27
第七章 搜索策略
根本概念 状态空间的搜索策略 与/或图的搜索策略 博弈树搜索
3) “与/或〞树:
上述两种方法也可结合起来使用,此时的图称为“与/或 〞树。其中既有“与〞节点,又有“或〞节点。
注意:状态图是与/或图的特殊形式,即与/或图中既有与关系 又有或关系,而状态图只有或关系。
描述; 2) 叶节点:无子节点的节点,亦称端节点; 3) 终止节点:有解的叶节点,对应本原问题。即终止节点一定
是端节点,但端节点不一定是终止节点。
29
第七章 搜索策略
根本概念 状态空间的搜索策略 与/或图的搜索策略 博弈树搜索
4) 可解节点:满足以下条件之一者: 它是一个终止节点。 它是一个“或〞节点,且其子节点中至少有一个是可解节点。 ③它是一个“与〞节点,且其子节点全部是可解节点。 5) 不可解节点:关于可解节点的三个条件全部不满足的节点
其中:a表示q1的变化, b表示q2的变化, c表示q3的变化。
9
第七章 搜索策略
根本概念 状态空间的搜索策略 与/或图的搜索策略 博弈树搜索
➢ 7.1.2 状态图表示法
把这种描述得到的有向图称为状态〔空间〕图。
其中的节点代表一种格局〔或称为状态〕,而两节 点之间的连线表示两节点之间的联系,它可视为某种操 作、规则、变换等。
网络营销的信息搜索策略

网络营销的信息搜索策略在网络营销中,信息搜索策略是至关重要的一环。
它涉及到寻找目标受众、了解竞争对手和市场趋势等关键信息,以便制定有效的市场推广策略并实现营销目标。
下面是一些网络营销的信息搜索策略:1. 网络搜索引擎:利用搜索引擎,如谷歌、百度、必应等,可以快速准确地找到相关的网络营销信息。
通过输入相关的关键词和短语,可以找到包括市场调研数据、竞争对手信息、用户需求等相关信息的网页、新闻、论坛等。
2. 社交媒体监测:社交媒体已经成为了解用户观点和趋势的重要渠道。
通过监测用户在社交媒体上的讨论和互动,可以获得关于产品好评和差评的反馈,了解用户需求和偏好,并及时回应用户问题和投诉。
3. 行业报告和研究:许多市场研究公司和咨询机构会定期发布涵盖各个行业的报告和研究。
通过阅读这些报告,可以了解行业的趋势、市场规模、竞争情况和预测等重要信息,从而指导网络营销策略的制定。
4. 参与行业社区和论坛:参与行业社区和论坛可以让你了解行业内专家和从业者的见解和经验分享。
这些交流平台常常涉及新技术、趋势、最佳实践以及与竞争对手的比较,可以帮助你发现新的营销机会并改进现有的营销策略。
5. 追踪竞争对手:了解竞争对手的营销活动和策略对于网络营销至关重要。
通过订阅竞争对手的新闻资讯、社交媒体渠道和邮件列表,可以及时了解他们的最新动态,从而进行市场定位的调整和竞争策略的优化。
6. 客户反馈和调查:通过与客户建立紧密的联系,收集和分析客户的反馈和意见。
可以通过在线调查、客户满意度调查等方式,获得客户对产品和服务的评价,了解他们的需求和期望,并根据反馈做出相应的改进。
综上所述,网络营销的信息搜索策略是多样的,可以利用网络搜索引擎、社交媒体监测、行业报告和研究、行业社区和论坛的交流、竞争对手追踪以及客户反馈和调查等方法来获得关键信息。
这些信息将为企业制定有效的网络营销策略和实现营销目标提供有力支持。
网络营销的信息搜索策略非常重要,因为只有了解目标受众、竞争对手和市场趋势,才能制定出有效的推广策略,并使营销活动取得成功。
第五章 搜索策略.

• 扩展节点1,只生成 有向边旁的箭头是指向父节点的 单一后继节点2,节 指针,每边代价为1
点2已有父节点3,
即节点2在先前扩展
节点3时已被生成,
现又作为节点1的后 继节点被再次生成。
从S0-3-2的代价为4,
从S0-1-2的代价为2,
后者代价小,修改 节点2指向父节点的
指针,让它指向节
点1。
S0
节点6为父节点,而需改
为以节点2为父节点。
S0
1
6
2
3
4
5
2 广度优先搜索—宽度优先搜索
(1扩)基展本并思考想察:它从是初否始为节目点标S节0开点始,,在逐第层n地层对的节节点点进没行有 全部扩展并考察之前,不对第n+1层的节点进行扩展。 OPEN表中的节点总是按进入的先后顺序排列,先进 入的节点排在前面,后进入的排在后面。
(4)缺点:搜索的盲目性较大,当目标节点距离 初始节点较远时,搜索效率低。
2
283 14
765
283
s0 1
4
1
765
3
2
3
184
765
4 283 14 765
5
283
164
7
5
6
83 214 765
14
8
3
214
765
22 83 214 765
7 283 714
65
15
283
714
6
5
23
813
2
4
765
8 23
184 765
16
123 84
765
24
283
7
搜索策略

4.1.2 状态空间法
1. 状态空间表示方法 状态(State): 是表示问题求解过程中每一步问题状况的数据结构,它可形式地表示为: Sk={Sk0, Sk1, …} 当对每一个分量都给以确定的值时,就得到了一个具体的状态。 操作(Operator) 也称为算符,它是把问题从一种状态变换为另一种状态的手段。。操作可以 是一个机械步骤,一个运算,一条规则或一个过程。操作可理解为状态集合上的 一个函数,它描述了状态之间的关系。 状态空间(State space) 用来描述一个问题的全部状态以及这些状态之间的相互关系。常用一个三元 组表示为: (S, F, G) 其中,S为问题的所有初始状态的集合;F为操作的集合;G为目标状态的集合。 状态空间也可用一个赋值的有向图来表示,该有向图称为状态空间图。在状 态空间图中,节点表示问题的状态,有向边表示操作。 4
P
t
t t
解树
20
4.1.3 问题归约法
11
这32种状态并非全有意义,除去不合法状态和修道士被野人吃 掉的状态,有意义的状态只有16种: S0=(3, 3, 1) S1=(3, 2, 1) S2=(3, 1, 1) S3=(2, 2, 1) S4=(1, 1, 1) S5=(0, 3, 1) S6=(0, 2, 1) S7=(0, 1, 1) S8=(3, 2, 0) S9=(3, 1, 0) S10=(3, 0, 0) S11=(2, 2, 0) S12=(1, 1,0) S13=(0, 2, 0) S14=(0, 1, 0) S15=(0, 0, 0) 有了这些状态,还需要考虑可进行的操作。 操作是指用船把修道士或野人从河的左岸运到右岸,或从河的 右岸运到左岸。 每个操作都应当满足如下条件: 一是船至少有一个人(m或c)操作,离开岸边的m和c的减少数 目应该等于到达岸边的m和c的增加数目; 二是每次操作船上人数不得超过2个; 三是操作应保证不产生非法状态。 因此,操作应由条件部分和动作部分: 条件:只有当其条件具备时才能使用 12 动作:刻划了应用此操作所产生的结果。
人工智能之搜索策略介绍课件

游戏AI:启发式搜 索策略在游戏中用
3 于寻找最优策略, 如国际象棋、围棋 等棋类游戏的AI算 法。
任务调度:启发式 搜索策略在任务调
2 度中用于优化任务 分配,如最小化任 务完成时间和资源 消耗。
机器人控制:启发 式搜索策略在机器
4 人控制中用于规划 机器人运动路径, 如自主导航和避障。
务调度、资源分配等。
启发式搜索策略的分类
局部搜索策略:只考虑当前状态
01
附近的解空间 全局搜索策略:考虑整个解空间
02
的所有状态 启发式搜索策略:根据问题特点, 03 选择合适的搜索策略 自适应搜索策略:根据搜索过程
04
中的信息,动态调整搜索策略
启发式搜索策略的应用实例
路径规划:启发式 搜索策略在路径规
强化学习搜索 策略:将强化 学习和搜索策 略相结合,以 实现更优的决 策和行动
强化学习搜索策略的分类
01 基于模型的搜索策略:使
用模型来预测状态和动作 的价值,如Q-learning 和Deep Q-Networks。
02 基于策略的搜索策略:直
接优化策略,如Policy Gradients和ActorCritic方法。
游戏AI:游戏策略、游戏 角色行为等
机器人控制:机器人路径 规划、机器人行为控制等
启发式搜索策略的定义
1
启发式搜索策略是一种基于 启发式信息的搜索策略。
2
它通过使用启发式信息来指 导搜索过程,以减少搜索空
间,提高搜索效率。
3
启发式信息可以是问题领域 的知识、经验或启发式函数。
4
启发式搜索策略广泛应用于 各种问题,如路径规划、任
第五章搜索策略分析

• 可解节点:满足下列条件之一
-它是一个终止节点
-它是一个“或”节点,且子节点中至少有一个是可
解节点
-它是一个“与”节点,且子节点全部是可解节点
• 不可解节点:关于可解节点的三
p
个条件全部不满足的节点称为不
可解节点
• 解树:由可解节点构成,并且由 这些可解节点推出初始节点(原 始问题)为可解节点的子树称为 t 解树,解树中一定包含初始节点。
2 状态空间表示法
• 状态空间表示法是用“状态”和“算符”来表示问 题的一种方法。“状态”用以描述问题求解过程中 不同时刻的状况;“算符”表示对状态的操作,算 符的每一次使用就使问题由一种状态变换为另一种 状态。当达到目标状态时,由初始状态到目标状态 所用算符的序列就是问题的一个解。
(1)状态:描述问题求解过程中任一时刻状况的数据 结构,一般用一组变量的有序组合表示: Sk=(Sk0,Sk1…) 当每一个分量确定时,就得到一个具体的状态
• 对任何一个状态,可使用的算符不止一个, 生成的后继状态可能有多个,涉及搜索策 略。
3 与/或树表示法:用于比较复杂的问题
(1)分解:把一个复杂问题分解为若干个较为简单的子问 题,每个子问题又可继续分解为若干个更为简单的子 问题,重复此过程,直到不需要再分解或者不能再分 解为止。然后对每个子问题分别进行求解,最后把各 个子问题的解复合起来就得到了原问题的解。
第五章 搜索策略
§5.1 基本概念1 什么搜索(1)搜索引起:人工智能要解决的问题大部分 是结构不良或非结构化的问题,而对这样的 问题一般不存在成熟的求解算法,只能用已 有的知识一步步地摸索着前进
搜索策略

搜索到第三层时, f1(s5)=f1(s7)=4 f1(s4)=f1(s6)=3, 出现均势,为打破均势,还需要一个新 的启发式函数, 定义新的启发式函数: f2=所有数字当前位置次最短路径走到正确 位置的步数乊和
各状态的启发式函数值:
数码
1 2 3 4 5 6 7 8 f2(s0)=1+1+0+0+0+1+0+2=5 f2(s1)=1+2+0+0+0+0+0+0+0+0+1+1+2=6 f2(s3)=1+1+0+0+1+1+0+2=6 f2(s4)=1+1+0+0+0+0+0+1=3 f2(s5)=1+1+0+0+0+1+0+2=5 f2(s6)=1+2+0+0+0+0+0+2=5
在3*3的方格棋盘上放置1、2、3、4、5、6、7、8共8个 棋子,初始状态为s0,目标状态为sg。
深度优先搜索其基本思想:
从初始节点S0开始,在其子节点中任选 一个节点迚行考察,若不是目标节点,则 再在该子节点的子节点中选择一个节点迚 行考察。如果该子节点可以扩展,则扩展 该子节点,依次向下搜索。在搜索树的每 一层始终先只扩展一个子节点,如此一直 向下搜索,直到某个子节点既不是目标节 点又不能继续扩展时,才从当前节点返回 上一级节点,沿另一方向继续前迚。
搜索引擎优化策略

搜索引擎优化策略在当今数字化的时代,拥有一个在搜索引擎中排名靠前的网站对于企业和个人来说至关重要。
搜索引擎优化(SEO)是一种通过优化网站结构、内容和技术等方面,以提高在搜索引擎结果页面(SERP)中排名的策略。
接下来,让我们深入探讨一些有效的搜索引擎优化策略。
一、关键词研究与选择关键词是搜索引擎优化的基础。
首先,需要确定与您的网站或业务相关的核心关键词。
这些关键词应该是潜在用户在搜索时可能使用的词汇。
可以通过以下几种方式进行关键词研究:1、使用关键词研究工具,如 Google 关键字规划师、百度指数等,了解不同关键词的搜索量、竞争程度和趋势。
2、分析竞争对手的网站,看看他们在使用哪些关键词。
3、与潜在用户进行交流,了解他们在寻找您的产品或服务时会使用哪些词汇。
选择关键词时,要注意平衡搜索量和竞争程度。
高搜索量的关键词通常竞争激烈,难以获得好的排名;而竞争程度较低的关键词虽然容易排名,但可能搜索量较小。
因此,最好选择一些既有一定搜索量,又相对竞争较小的关键词。
二、网站结构优化一个清晰、合理的网站结构有助于搜索引擎爬虫更好地抓取和理解您的网站内容。
以下是一些网站结构优化的要点:1、确保网站的导航简洁明了,用户能够轻松找到所需的信息。
2、使用面包屑导航,帮助用户和搜索引擎了解页面在网站中的位置。
3、创建网站地图(XML 和 HTML 版本),并提交给搜索引擎,以便它们更全面地了解您的网站架构。
此外,合理的 URL 结构也很重要。
URL 应该简洁、包含关键词,并且易于理解。
例如,``这样的 URL 结构就比较清晰。
三、内容优化优质、有价值的内容是吸引用户和搜索引擎的关键。
以下是一些内容优化的建议:1、确保您的内容是原创的、独特的,并且能够满足用户的需求。
2、在内容中自然地融入选定的关键词,但要避免过度堆砌,以免被搜索引擎视为作弊。
3、使用标题标签(H1、H2、H3 等)来组织内容,使内容结构更清晰,便于搜索引擎理解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
信息工程学院
2007年5月10日
第5章 搜索策略
(4) 考察节点n是否为目标节点。若是,则得到问题 的解,成功退出; (5) 若节点n不可扩展,则转第(2)步; (6) 扩展节点n,将其子节点放入Open表的首部,并 为每一个子节点设置指向父节点的指针,然后转第(2) 步。 从以上过程可以看出,深度优先搜索和广度优先 搜索的唯一区别是节点在Open表中的排列顺序不同。 广度优先搜索是把最新生成的节点放在Open表的尾部 (用队列实现),而深度优先搜索则是把最新生成的 节点放在Open表的首部(用堆栈实现)。
信息工程学院 2007年5月2007年5月10日
第5章 搜索策略
5.2.3 深度优先搜索(用STACK) 深度优先搜索是一种后生成的节点先扩展的策略。这种搜索策略的 搜索过程是:从初始节点S0开始,在其子节点中选择一个最新生成的节 点进行考察,如果该子节点不是目标节点且可以扩展,则扩展该子节点, 然后再在此子节点的子节点中选择一个最新生成的节点进行考察,依此 向下搜索,直到某个子节点既不是目标节点,又不能继续扩展时,才选 择其兄弟节点进行考察。Open表是一种栈结构,最先进入的节点排在最 后面(压在最下面),最后进入的节点排在最前面。 深度优先搜索算法如下: (1) 把初始节点S0放入Open表中; (2) 如果Open表为空,则问题无解 ,失败退出; (3) 把Open表的第一个节点取出放入Closed表,并记该节点为n; (栈顶元素)
信息工程学院 2007年5月10日
第5章 搜索策略
例5.6 八数码难题。要求用深 度优先搜索策略寻找从初始状态到 目标状态的解路径。 解:应用广度优先搜索策略, 其部分搜索树如图5-14所示。在图 5-14中,由于问题的目标尚未达到, 因此搜索还需要继续进行下去。 从深度优先搜索的算法可以看 出,搜索一旦进入某个分支,就将 沿着这个分支一直进行下去,如果 目标恰好在这个分支上,则它可以 很快找到解。但是,如果目标不在 这个分支上,且该分支又是一个无 穷分支,则搜索过程就不可能找到 解。因此,深度优先搜索是一种不 完备策略,即使问题有解,它也不 一定能够找到解。此外,即使在能 找到解的情况下,按深度优先找到 的解也不一定是路径最短的解。
信息工程学院 2007年5月10日
第5章 搜索策略
应用实例
• 例5.5 八数码难题。在3×3的方格棋盘上,分别放置了标有 数字1、2、3、4、5、6、7、8的八张牌,初始状态S0,目标 状态Sg,如图5-11所示。可以使用的操作有:空格左移,空 格上移,空格右移,空格下移。即只允许把位于空格左、上、 右、下方的牌移入空格。要求应用广度优先搜索策略寻找从 初始状态到目标状态的解路径。 • (定义距离函数,评价每张与目标的距离)
信息工程学院
2007年5月10日
第5章 搜索策略
解:应用广度优先搜索策略,可以在第四级得到解, 其搜索树如图5-12所示。 由图5-12可以看出,解的路径是 S0→3→8→16→26 优点:广度优先搜索是一种完备策略,即只要问题有 解,它就一定可以找到解。并且,广度优先搜索找到 的解,还一定是路径最短的解。 缺点:主要缺点是盲目性较大,尤其是当目标节点距 初始节点较远时,将产生许多无用的节点,因此其搜 索效率较低。
第5章 搜索策略
5.2 状态空间的盲目搜索 状态空间的搜索策略可分为盲 目搜索和启发式搜索两大类。尽管 盲目搜索的性能不如启发式搜索, 但由于启发式搜索需要抽取与问题 本身有关的特征信息,而这种特征 信息的抽取往往又比较困难,因此 盲目搜索仍不失为一种有用的搜索 策略。 5.2.1 一般图搜索过程 当用状态空间法解决问题时, 有以下两个方面的因素需要考虑: 一方面,对大问题计算机无法保存 其全部状态空间;另一方面,对具 体问题与解有关的状态空间一般仅 是全部状态空间的一部分。解决这 一问题的方法是采用状态空间搜索 技术。
信息工程学院 2007年5月10日
第5章 搜索策略
5.2.4 有界深度优先搜索 为了弥补上述两种策略的缺点,一种较好的折衷办法是在深度优先策 略中引入深度限制,即采用有界深度优先搜索。有界深度优先搜索过程总 体上按深度优先策略进行,但对搜索深度需要给出一个深度限制dm,当搜 索深度达到了dm,但还没有找到目标时,就停止该分支的搜索,换到另外 一个分支进行搜索。 当给定的深度限制为dm时,有界深度优先搜索算法如下: (1) 把初始节点S0放入Open表中,置S0的深度d(S0)=0; (2) 如果Open表为空,则问题无解,失败退出; (3) 把Open表的第一个节点取出放入Closed表,并记该节点为n; (4) 考察节点n是否为目标节点。若是,则得到问题的解,成功退出; (5) 如果节点n的深度d(n)=dm,则转第(2)步; (6)若节点n不可扩展,则转第(2)步; (7)扩展节点n,将其子节点放入Open表的首部,并为每一个子节点设 置指向父节点的指针,然后转第(2)步。
信息工程学院
2007年5月10日
第5章 搜索策略 5.2.2 广度优先搜索
广度优先搜索也称为宽度优先搜索,它是一种先生成的节点先扩展的策略。 这种搜索策略的搜索过程是:从初始节点S0开始逐层向下扩展,在第n层节点 还没有全部搜索完之前,不进入第n+1层节点的搜索。Open表中的节点总是按 进入的先后排序,先进入Open表的节点排在前面,后进入Open表的节点排在后 面。 广度优先搜索算法如下:(用QUEUE) (1) 把初始节点S0放入Open表中; (2) 如果Open表为空,则问题无解,失败退出; (3) 把Open表的第一个节点取出放入Closed表,并记该节点为n; (4) 考察节点n是否为目标节点。若是,则得到问题的解,成功退出; (5) 若节点n不可扩展,则转第(2)步; (6) 扩展节点n,将其子节点放入Open表的尾部,并为每一个子节点设置 指向父节点的指针,然后转第(2)步。
信息工程学院
2007年5月10日
第5章 搜索策略
组合爆炸问题 • 对那些结构性能较好,理论上有算法可依的问题, 如果问题或算法的复杂性较高(如按指数形式增 长),由于受计算机在时间和空间上的限制,也 无法付诸实用。 • 例如,64阶梵塔问题有 3,433,683,820,292,512,484,657,849,089,281状 态,仅从空间上来看,这是一个任何计算机都无 法存储的问题。可见,理论上有算法的问题实际 上不一定可解。像这类问题,也需要采用搜索的 方法来进行求解。