莫克维迪轴流式调节阀
Belimo B219VSS 液体控制阀说明书

B219VSS•Stainless Steel Body, Ball and StemType overviewType DNB219VSS20 Technical dataFunctional data Valve size [mm]0.75" [20]Fluid chilled or hot water, up to 60% glycol, steamFluid Temp Range (water)-22...298°F [-30...148°C]Body Pressure Rating1500 psig WOGClose-off pressure ∆ps1000 psiFlow characteristic modified equal percentageMax Differential Pressure (Steam)50 psiFlow Pattern2-wayLeakage rate ANSI Class VIControllable flow range90° rotation, A – AB open ccw, B – AB open cwCv30Maximum Inlet Pressure (Steam)50 psiMaximum Velocity15 FPSMaterials Valve body Stainless steel A351-CF8M 316Housing seal PTFEStem316 stainless steelStem seal RPTFESeat RPTFELock nut stainless steelPipe connection SAE NPT (female connections)Ball316 stainless steelSuitable actuators Non-Spring NMB(X)GRCB(X)GRB(X)Spring NFB(X)Safety notesWARNING: This product can expose you to lead which is known to the State of California tocause cancer and reproductive harm. For more information go to B219VSSApplicationProduct featuresThese threaded valves are designed to provide modulating or two position control of hot or chilled water and saturated steam systems under 50 psi.Typical applications include reheat coils, VAV terminal control, unit ventilators, and air handlers, especially in areas which have minimum profile requirements.Up to 50 psi steam1/2" - 2000 PSIG WOG, Cold Non-Shock Federal Specification: WW-V-35C, Type II Composition: SS Style: 3Flow/Mounting detailsDimensionsType DN Weight B219VSS201.32 lb [0.60 kg]B219VSS+GRC..N4AB CD E F 14.1" [358]3.0" [76]11.8" [300]11.0" [279]3.4" [86]3.4" [86]NMB24-3-X1FootnotesOn/Off, Floating point, Non fail-safe, 24 VTechnical dataElectrical dataNominal voltageAC/DC 24 V Nominal voltage frequency 50/60 HzNominal voltage rangeAC 19.2...28.8 V / DC 21.6...28.8 V Power consumption in operation 2 W Power consumption in rest position 0.2 W Transformer sizing 4 VAElectrical Connection18 GA plenum cable, 1 m, with 1/2" NPTconduit connector, degree of protection NEMA 2 / IP54Overload Protectionelectronic thoughout 0...90° rotation Functional dataDirection of motion motor selectable with switch 0/1Manual override external push button Angle of rotation Max. 95°Angle of rotation note adjustable with mechanical stop Running Time (Motor)95 s / 90°Running time motor note constant, independent of load Noise level, motor 45 dB(A)Position indicationMechanical, 30...65 mm stroke Safety dataPower source ULClass 2 Supply Degree of protection IEC/EN IP54Degree of protection NEMA/UL NEMA 2Enclosure UL Enclosure Type 2Agency Listing ISO, CE, cCSAus Quality Standard ISO 9001UL 2043 CompliantSuitable for use in air plenums per Section 300.22(C) of the NEC and Section 602 of the IMCAmbient humidity Max. 95% RH, non-condensing Ambient temperature -22...122°F [-30...50°C]Storage temperature -40...176°F [-40...80°C]Servicingmaintenance-free Weight Weight2.1 lb [0.94 kg]MaterialsHousing material Galvanized steel and plastic housing†Rated Impulse Voltage 800V, Type action 1, Control Pollution Degree 3.NMB24-3-X1 AccessoriesElectrical accessories Description TypeBattery backup system, for non-spring return models NSV24 USBattery, 12 V, 1.2 Ah (two required)NSV-BATAuxiliary switch 1x SPDT add-on S1AAuxiliary switch 2x SPDT add-on S2AFeedback potentiometer 140 Ω add-on, grey P140A GRFeedback potentiometer 1 kΩ add-on, grey P1000A GRFeedback potentiometer 10 kΩ add-on, grey P10000A GRFeedback potentiometer 2.8 kΩ add-on, grey P2800A GRFeedback potentiometer 500 Ω add-on, grey P500A GRFeedback potentiometer 5 kΩ add-on, grey P5000A GR Electrical installationINSTALLATION NOTESActuators with appliance cables are numbered.Provide overload protection and disconnect as required.Actuators may also be powered by DC 24 V.Actuators Hot wire must be connected to the control board common. Only connect common toneg. (-) leg of control circuits. Terminal models (-T) have no-feedback.Actuators may be connected in parallel if not mechanically linked. Power consumption andinput impedance must be observed.Meets cULus requirements without the need of an electrical ground connection.Warning! Live electrical components!During installation, testing, servicing and troubleshooting of this product, it may be necessaryto work with live electrical components. Have a qualified licensed electrician or other individualwho has been properly trained in handling live electrical components perform these tasks.Failure to follow all electrical safety precautions when exposed to live electrical componentscould result in death or serious injury.Wiring diagramsOn/Off Floating PointFloating Point - Triac Sink。
Belimo G7100D 4英寸热水 冷水控制阀说明书

G7100D•••••Technical dataFunctional dataValve Size 4" [100]Fluidchilled or hot water, up to 60% glycol Fluid Temp Range (water)32...300°F [0...149°C]Body Pressure Rating ANSI Class 125, up to 175 psi below 150°F Flow characteristic linearServicing repack/rebuild kits available Rangeability Sv 50:1Flow Pattern 3-way Diverting Leakage rateANSI Class III Controllable flow range stem up - open AB – B Cv 154 ANSI Class125Body pressure rating noteup to 175 psi below 150°F MaterialsValve body Cast iron - ASTM A126 Class B Valve plug bronzeStem seal NLP EPDM (no lip packing)SeatStainless steel AISI 316Pipe connection125 lb flanged Suitable actuatorsNon-Spring EVB(X)Electronic fail-safeAVKB(X)Safety notesWARNING: This product can expose you to lead which is known to the State of California to cause cancer and reproductive harm. For more information go to The valve has been designed for use in stationary heating, ventilation and air-conditioning systems and must not be used outside the specified field of application, especially in aircraft or in any other airborne means of transport.Only authorised specialists may carry out installation. All applicable legal or institutional installation regulations must be complied during installation.The valve does not contain any parts that can be replaced or repaired by the user.When determining the flow rate characteristic of controlled devices, the recognised directives must be observed.Product featuresG7100D Flow/Mounting detailsDimensionsDimensional drawingsEVB, EVX, RVB, RVXA B C D E F Number of Bolt Holes13.7" [349]13.0" [330]29.7" [754]19.8" [502] 4.5" [114] 4.5" [114]8AFB, AFXA B C D E F Number of Bolt Holes13.7" [349]13.0" [330]28.0" [711]18.3" [464] 4.5" [114] 5.3" [135]8AVKB, AVKXA B C D E F Number of Bolt Holes13.7" [349]13.0" [330]29.7" [754]19.8" [502] 4.5" [114] 4.5" [114]8AVKB, AVKXG7100DA B C D E F Number of Bolt Holes13.7" [349]13.0" [330]29.7" [754]19.8" [502] 4.5" [114] 4.5" [114]8EVX120-3 On/Off, Floating Point, Non-Spring Return, Linear,AC 100...240 VTechnical dataElectrical data Nominal voltage AC 100...240 VNominal voltage frequency50/60 HzPower consumption in operation 5 WPower consumption in rest position 1.5 WTransformer sizing7.5 VA (class 2 power source)Electrical Connection18 GA appliance cable with 1/2" conduit connector,3 ft [1 m], degree of protection NEMA 2 / IP54Overload Protection electronic throughout full strokeElectrical Protection actuators are double insulatedFunctional data Actuating force motor560 lbf [2500 N]Input Impedance100 kΩ (0.1 mA), 500 Ω, 1000 Ω (on/off)Position feedback U note No FeedbackDirection of motion motor selectable with switch 0/1Manual override 5 mm hex crank (3/16" Allen), suppliedStroke2" [50 mm]Running Time (Motor)default 90 s, variable 90 or 150 sRunning time motor variable90 or 150 sNoise level, motor60 dB(A)Position indication Mechanically, with pointerSafety data Degree of protection IEC/EN IP54Degree of protection NEMA/UL NEMA 2 UL Enclosure Type 2Agency Listing cULus acc. to UL60730-1A/-2-14, CAN/CSAE60730-1:02, CE acc. to 2014/30/EU and 2014/35/EU; Listed to UL 2043 - suitable for use in airplenums per Section 300.22(c) of the NEC andSection 602.2 of the IMCQuality Standard ISO 9001Ambient temperature-22...122°F [-30...50°C]Storage temperature-40...176°F [-40...80°C]Ambient humidity max. 95% r.H., non-condensingServicing maintenance-freeWeight Weight 5.73 lb [2.6 kg]Materials Housing material Die cast aluminium and plastic casingSafety notesEVX120-3•••••PVC W'Shld for GV w/UGLK (GM)Battery Back Up System for SY(7~10)-110120 to 24 VAC, 40 VA transformer.50% voltage divider kit (resistors with wires).PC Tool computer programming interface, serial port.Electrical installationINSTALLATION NOTESActuators with appliance cables are numbered.Actuators may be connected in parallel. Power consumption and input impedance must be observed.Meets cULus requirements without the need of an electrical ground connection.Warning! Live Electrical Components!During installation, testing, servicing and troubleshooting of this product, it may be necessary to work with live electrical components. Have a qualified licensed electrician or other individual who has been properly trained in handling live electrical components perform these tasks. Failure to follow all electricalsafety precautions when exposed to live electrical components could result in death or serious injury. On/Off Floating Point。
莫克威尔德调节阀的操作及维护
制 阀的控 制原理 、操作 、维护 、可供长输 原油 管道的技 术人 员进 阀 。然后操 作液压泵手动杆 。
行设 备维护和保 养。
(4)手动 操作结束 后 ,若要恢 复到远控状 态 ,将手柄 掰到斜
关键词 :调节 阀结构 ;原理 ;操作 ;维护
下方 向 ,两 个螺钉旋 钮松开退 回,关 闭旁 通阀 ,并打开 气源 阀门
1 M oKVELD控 制 阀
1.1 MOKVELD控 制 阀的结 构 MOKVELD控 制 阀是 轴流 式调 节 阀 中的一 种,它是 由阀外
体 、阀 内体 、阀杆 、活塞 杆 、活塞 和笼筒 构成,其 中阀外体和 阀 内 体共 同构成 了阀体,是 指一个完整 的铸造体 阀的内外体之 间 ,有 一 轴 向对称 流道 。其 中有 一个 直 角式传 动机 构活 塞 由活 塞杆 与 阀杆共 同构成 ,通过 这个 传动机 构 ,可 以在 导轨 内顺 着阀 门 的 中心 线进行运 动,活 塞杆与 阀杆通过 有 45度角的齿 条相互啮 合,经过 阀杆的上 下传动 来带 动活塞 杆和 活塞在 整个行 程上 的 左右 运动 。活 塞可 以保持 内外 压 力平衡 是 因为活 塞的端 面上 均匀 的分 布着一些孔 洞,因此 ,在进行 运动的时候 可以不被轴 向 间的压 力所影 响 。
MOKVELD控 制 阀是轴 流 式活 塞 型控制 阀,活 塞边缘 与 笼
2、每周清洗空 压机空气过滤 器和润滑油过滤 器。
筒 的孔 口之 间发生 节流 是通过 在 笼筒 内对 活塞进 行 的引导 而
3、每年对供 气管线干燥过滤 器中的干燥剂进行 一次更换 。
产生 的。
4、每年对调节 阀系统进行一 次与站控 SCADA系统的调校 。
Festo 比例流量调节阀 VEMD-.-1 -5-R1 操作手册说明书
原版操作手册的译本1适用文件有关产品的所有可用文件 è /pk。
2安全2.1安全注意事项–仅允许将产品安装在处于安全状态的部件上。
–仅在原装状态下使用产品,请勿擅自进行改动。
–仅允许由具备资质的专业人员进行安装和装配。
专业人员接受过电气职业培训或相应指导。
–注意关于电气安全的其他措施 è 5.2 电气部分安装。
2.2按规定使用根据给定的额定值按比例调节惰性气体和空气的流量。
该阀在限定的技术特性范围内,适合用于医疗技术。
对于带有特殊要求的应用,例如与卫生和消毒有关的要求,必须根据情况采取进一步的措施。
该阀是一款设计用于安装在终端设备中的组件。
2.3可预见的错误使用不得在没有绝缘壳体的情况下使用产品。
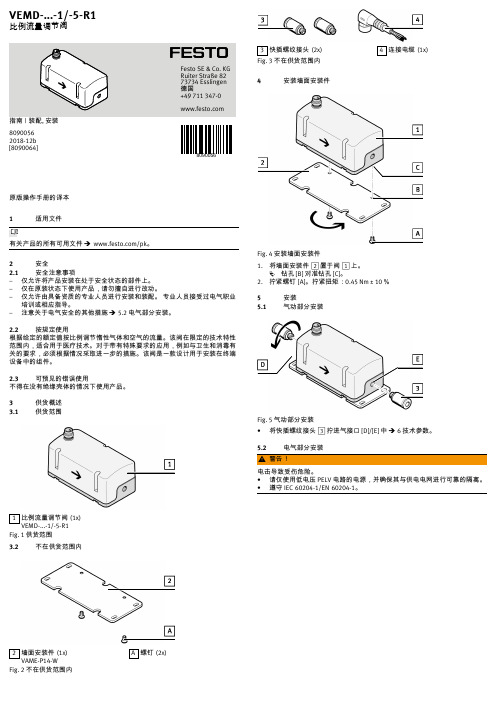
3供货概述3.1供货范围1比例流量调节阀 (1x)VEMD-...-1/-5-R1 Fig. 1 供货范围3.2不在供货范围内2墙面安装件 (1x)VAME-P14-WA 螺钉 (2x)Fig. 2不在供货范围内3快插螺纹接头 (2x)4连接电缆 (1x)Fig. 3 不在供货范围内4安装墙面安装件Fig. 4 安装墙面安装件1.将墙面安装件 2 置于阀 1 上。
Ä钻孔 [B] 对准钻孔 [C]。
2.拧紧螺钉 [A]。
拧紧扭矩:0.45 Nm ± 10 %5安装5.1气动部分安装Fig. 5 气动部分安装•将快插螺纹接头 3 拧进气接口 [D]/[E] 中 è 6 技术参数。
5.2电气部分安装电击导致受伤危险。
•请仅使用低电压 PELV 电路的电源,并确保其与供电电网进行可靠的隔离。
•遵守 IEC 60204-1/EN 60204-1。
8090056VEMD-...-1/-5-R1比例流量调节阀80900562018-12b [8090064]Festo SE & Co. KG Ruiter Straße 82 73734 Esslingen 德国+49 711 Fig. 6 电气部分安装•将连接电缆 4 安装到插头 [F] 上 è 6 技术参数。
Festo Didactic三路空气控制阀门与数字位器(HART)-DVC 6200,实验室系列说明

LabVolt Series Datasheet Three-Way Pneumatic Control Valve with Digital Positioner (HART) - DVC 6200588376 (46955-E0)* The product images shown in this document are for illustration purposes; actual products may vary. Please refer to the Specifications section ofeach product/item for all details. Festo Didactic reserves the right to change product images and specifications at any time without notice.Festo Didactic en 120 V - 60 Hz 12/2023Three-Way Pneumatic Control Valve with Digital Positioner (HART) - DVC 6200, LabVolt SeriesTable of ContentsGeneral Description_________________________________________________________________________________3 Manual___________________________________________________________________________________________3 Table of Contents of the Manual(s)_____________________________________________________________________3Three-Way Pneumatic Control Valve with Digital Positioner (HART) - DVC 6200, LabVolt Series•••••••••••••General DescriptionThe Three-Way Control Valve is an industrial bronze control globe valve designed mainly for temperature control applications. This reliable valve features a durable construction, tight shutoff, and good control characteristics. The valve is designed to be used in mixing mode (two inlets, one outlet) and is of equalpercentage type. This valve is normally open on the lower port.Like the Control Valve, Model 46950-X, this model has either a pneumatic or an electric actuator and mayfeature options such as a digital valve controller (either a DVC 2000 or a DVC 6200) supporting either HART or Fieldbus, or a pneumatic positioner. Refer to the description of the equivalent 46950-X model for moreinformation.46955-0 Three-Way Pneumatic Control Valve with Digital Positioner (HART) - DVC 200046955-A Three-Way Pneumatic Control Valve with Positioner (Fisher 3660)46955-B Three-Way Pneumatic Control Valve 46955-C Three-Way Electric Control Valve 46955-D Three-Way Pneumatic Control Valve with Digital Positioner (FOUNDATION Fieldbus) - DVC 600046955-E Three-Way Pneumatic Control Valve with Digital Positioner (HART) - DVC 6000ManualDescription ManualnumberControl Valves (User Guide) __________________________________________________________585145 (86001-E0)Table of Contents of the Manual(s)Control Valves (User Guide) (585145 (86001-E0))1 Basic Control Valve Theory2 Basic Control Valve (46950-B)3 Pneumatic Control Valve with a Positioner (46950-A)4 Control Valve with DVC2000 (46950-0)5 Control Valve with DVC6000 – HART/FF (46950-E/-D)6 Control Valve with DVC6200 – HART/FF (46950-E/-D)7 Electric Control Valve (46950-C)Three-Way Pneumatic Control Valve with Digital Positioner (HART) - DVC 6200, LabVolt Series Reflecting the commitment of Festo Didactic to high quality standards in product, design, development, production, installation, and service, our manufacturing and distribution facility has received the ISO 9001 certification.Festo Didactic reserves the right to make product improvements at any time and without notice and is not responsible for typographical errors. Festo Didactic recognizes all product names used herein as trademarks or registered trademarks of their respective holders. © Festo Didactic Inc. 2023. All rights reserved.Festo Didactic SERechbergstrasse 373770 DenkendorfGermanyP. +49(0)711/3467-0F. +49(0)711/347-54-88500Festo Didactic Inc.607 Industrial Way WestEatontown, NJ 07724United StatesP. +1-732-938-2000F. +1-732-774-8573Festo Didactic Ltée/Ltd675 rue du CarboneQuébec QC G2N 2K7CanadaP. +1-418-849-1000F. +1-418-849-1666。
莫克威尔德RZD控制阀在西气东输的应用

莫克威尔德RZD控制阀在西气东输的应用作者:屠明刚高峰来源:《中国新技术新产品》2009年第09期摘要:莫克威尔德阀门公司 RZD 控制阀的控制方式是轴流式活塞型控制阀,专门用于控制流量和压力,在西气东输分输场站上起着控制天然气压力和流量的的作用,通过对控制阀的结构、特性的充分阐述,以及对RZD控制阀典型控制的充分分析,论述RZD控制阀在西气东输的具体应用。
关键词:RZD控制阀;结构;特性;典型控制;应用1 莫克威尔德RZD 控制阀在西气东输上用途描述西气东输天然气分输场站采用德国RMG安全截断阀、RMG调节阀和荷兰莫克威尔德控制阀相配合的压力和流量控制方式,依据下游天然气工业和城市用气量的多少来进行调压和流量的调节。
了解莫克威尔德阀门RZD 控制阀的结构、典型控制,对日常维护、常见故障的分析与解决起到决定性的作用。
莫克威尔德RZD控制阀主要特性如下:1.1非常好的流体分布控制阀阀体的形状可以使流体非常容易的通过,同时可使流体在阀门内部径向均匀分布,从而最大限度的减少紊流和噪音。
1.2密封性好主密封包括一个梯形的软密封环,这种特殊的结构可以使密封圈在流体压力下被压紧,从而达到密封的效果。
1.3控制流体阀门的机械部分包括带孔的圆筒(笼套),及中空的活塞,活塞可以左右移动,活塞在笼套中的位置,以及笼套上孔的不同形状和大小决定了多少流体可以通过控制阀。
1.4 快速关闭控制阀的机械结构使得活塞在移动时基本上不受阀门前后压差的阻力,这样,就可以用相对小和快速的执行机构操作阀门。
1.5动作在活塞上安装有活塞杆,活塞杆上有 45°角的啮齿,活塞杆由有相同啮齿的阀杆操作。
当阀杆向上移动时,活塞向后移动,阀门开启。
2 莫克威尔德RZD 控制阀的结构莫克威尔德RZD控制阀主要由多孔龙套、活塞、活塞杆、45°角的啮齿传动杆、阀体组成。
3 西气东输典型的控制系统3.1 就地手动操作3.2 远程双向电动控制,在西气东输主要是电动控制操作也就是PID控制。
MOKVELD控制阀的特点及日常操作维护要点

摘要:西气东输天然气输气场站采用控制阀对下游用户进行压力和流量的调节,其阀门为莫克威尔德轴流式控制阀,它的坚固耐用、低维护、高性能的特点,在西气东输场站中的总效率非常高。
本文介绍了西气东输站场的调压撬的调压系统、MOKELD阀门的结构特点及工作原理、操作方法、维护检修以及常见故障判断和处理。
关键词:MOKVELD阀门;原理;操作;故障维护一、西气东输调压系统简介西气东输站场的输气调压系统由安全截断阀、监控调压阀、工作调压阀串联组成,构成一个调压撬,三者均为独立的设备。
正常情况下,安全截断阀、监控调压阀为常开且全开状态,由工作调压阀根据下游压力的大小进行阀门开度的调节。
一旦工作调压阀出现故障无法对下游压力进行调节时,就会由监控调压阀进行调节。
监控调压阀也出现故障时,无法对下游进行压力调节,下游压力不断升高,达到安全阀设定的极限保护压力时,安全截断阀自动跳断,关断气源,起到保护压力管道和设备的安全,这就是所谓的三级调压的原理。
二、MOKVELD的结构及原理(一)基本结构:由阀杆、活塞杆、活塞、笼套、阀体五部分构成。
阀腔形成轴流式环形通道,阀杆与活塞杆采用90°的啮合齿条扭矩传递设计,活塞端面设有平衡孔,使活塞在阀腔内腔移动中受力平衡。
(二)工作原理:MOKVELD控制阀为轴流式控制阀,通过位于阀杆和活塞上90°啮合齿条传动机构将阀杆的垂直运动转化成活塞的轴向运动,然后改变活塞与笼套相对接触面积的大小来控制阀门开度,从而进行压力调节。
三、操作方法(一)操作方式MOKVELD-RZD控制阀控制与操作方式分为远程和就地操作,远程操作又分手动控制和自动控制,就地控制又分为就地手动和就地电动控制。
(二)远程操作1、远程手动控制在站控机操作界面下点击需要操作的阀门图标,出现该阀的操作面板,在模式中选择手动,可以通过操作面板中的“强制”选项输入阀门的开度值(用百分号表示阀门开度),还可以通过操作面板中的“开阀命令”和“关阀命令”进行阀门的开关操作。
WCC 1745 流体温度调节阀说明书

Product FeaturesFast quarter turn open or closed operation, Stainless steel ball and stem,Positive shut-off, Two piece body constructionApplicationWater-side control of air handling apparatus in ventilation and air-conditioningsystem.Water/Steam control in heating system.300:1 rangeability.The dimensions and drilling of end flanges conform to the American cast ironflange standard, Class 150 (ANSI B16.1).B2100VB-024, 1”, V Ball Control ValveHardened Chrome Plated Carbon Steel Body, Stainless Steel Ball and StemDatecreated,7/22/216-Subjecttochange.©BelimoAircontrols(USA),Inc.B2100VB-024, 1”, V Ball Control Valve Hardened Chrome Plated Carbon Steel Body, Stainless Steel Ball and StemDatecreated,7/22/216-Subjecttochange.©BelimoAircontrols(USA),Inc.*Variable when configured with MFT options.†Rated Impulse Voltage 800V, Type of action 1.AA, Control Pollution Degree 3NFX24-MFT-S-X1Modulating, Spring Return, 24 V, Multi-Function Technology®D a t e c r e a t e d , 07/22/2016 - S u b j e c t t o c h a n g e . © B e l i m o A i r c o n t r o l s (U S A ), I n c .AActuators with appliance cables are numbered.Provide overload protection and disconnect as required.Actuators may also be powered by 24 VDC.Two built-in auxiliary switches (2x SPDT), for end position indication,interlock control, fan startup, etc.Only connect common to negative (-) leg of control circuits.A 500 Ω resistor (ZG-R01) converts the 4 to 20 mA control signal to 2to 10 VDC.Control signal may be pulsed from either the Hot (Source) or Common(Sink) 24 VAC line.For triac sink the Common connection from the actuator must be connected to the Hot connection of the controller. Position feedback cannot be used with a triac sink controller; the actuator internalcommon reference is not compatible.Actuators may be connected in parallel if not mechanically linked. Powerconsumption and input impedance must be observed.IN4004 or IN4007 diode. (IN4007 supplied, Belimo part number 40155).Apply only AC line voltage or only UL-Class 2 voltage to the terminals of auxiliary switches. Mixed or combined operation of line voltage/safetyextra low voltage is not allowed.Meets cULus requirements without the need of an electrical ground connection.!WARNING! LIVE ELECTRICAL COMPONENTS!During installation, testing, servicing and troubleshooting of thisproduct, it may be necessary to work with live electrical components. Have a qualified licensed electrician or other individual who has been properly trained in handling live electrical components perform these tasks. Failure to follow all electrical safety precautions when exposed to live electrical components could result in death or serious injury.NFX24-MFT-S-X1Modulating, Spring Return, 24 V, Multi-Function Technology®D a t e c r e a t e d , 07/22/2016 - S u b j e c t t o c h a n g e . © B e l i m o A i r c o n t r o l s (U S A ), I n c .NFX24-MFT-S-X1Modulating, Spring Return, 24 V, Multi-Function Technology®D a t e c r e a t e d , 07/22/2016 - S u b j e c t t o c h a n g e . © B e l i m o A i r c o n t r o l s (U S A ), I n c .。
莫克维迪轴流式调节阀
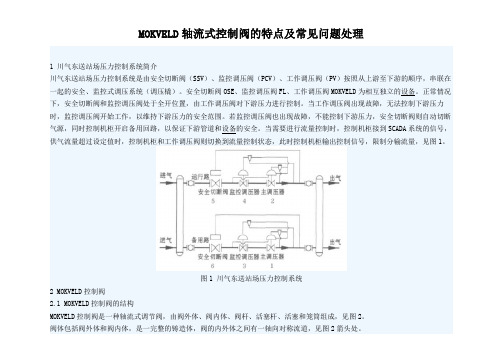
MOKVELD轴流式控制阀的特点及常见问题处理1 川气东送站场压力控制系统简介川气东送站场压力控制系统是由安全切断阀(SSV)、监控调压阀(PCV)、工作调压阀(PV)按照从上游至下游的顺序,串联在一起的安全、监控式调压系统(调压橇)。
安全切断阀OSE、监控调压阀FL、工作调压阀MOKVELD为相互独立的设备。
正常情况下,安全切断阀和监控调压阀处于全开位置,由工作调压阀对下游压力进行控制。
当工作调压阀出现故障,无法控制下游压力时,监控调压阀开始工作,以维持下游压力的安全范围。
若监控调压阀也出现故障,不能控制下游压力,安全切断阀则自动切断气源,同时控制机柜开启备用回路,以保证下游管道和设备的安全。
当需要进行流量控制时,控制机柜接到SCADA系统的信号,供气流量超过设定值时,控制机柜和工作调压阀则切换到流量控制状态,此时控制机柜输出控制信号,限制分输流量,见图1。
图1 川气东送站场压力控制系统2 MOKVELD控制阀2.1 MOKVELD控制阀的结构MOKVELD控制阀是一种轴流式调节阀,由阀外体、阀内体、阀杆、活塞杆、活塞和笼筒组成,见图2。
阀体包括阀外体和阀内体,是一完整的铸造体,阀的内外体之间有一轴向对称流道,见图2箭头处。
笼筒是减压阀的关键部件,壁面上有许多孔洞,MOKVELD控制阀选用三层笼筒,即笼筒壁面分三层,每层按一定规律分布有许多孔洞,三层壁面按一定的要求组合为一体。
活塞杆与阀杆构成一个90°的角式传动机构(见图2),活塞借助此传动机构在导轨内沿阀门的中心线运动,活塞杆与阀杆上4 5°的齿条相互啮合,阀杆上下传动,带动活塞杆及活塞在全行程上左右运动。
活塞的端面上均匀分布有孔洞,以使活塞内外压力平衡,左右运动时不受轴向压力的影响。
1)阀外体;2)阀内体;3)活塞杆;4)阀杆;5)活塞;6)笼筒图2 MOKVELD控制阀结构示意图2.2 MOKVELD控制阀的特点2.2.1 介质的轴流性由于采用轴向对称流道,完全避免了间接流和流向不必要的改变,最大限度地提高了单位直径上的流通能力,大大降低了噪音和紊流的形成,并可以防止上游未经过处理的流体腐蚀阀门。
克利巴德实验室4路切换阀说明书

4-Way TV-4D TV-4M TV-4DM TV-4DH TV-4MH TV4DMH
35
2.437 1.437 1.062 4
4-Way 1/8” NPT Valves
0.125 0.875
35 5/8-32 thd.
0.171 dia. mtg. holes
0.187
2 (exhaust 3) #10-32 (outlet 2)
3
TV-4D
TV-4DP
4 5 1 TV-4M
2
3
TV-4MP
TV-4DM
4
5 1
2
3
TV-4DMP
#10-32 1/8” NPT #10-32 1/8” NPT #10-32 1/8” NPT
Detented Momentary Detented
SPRING CENTERED supply blocked both sides exhausted
4
2
0 10 20 30 40 50 60 70 80 90 100
Pressure (psig)
• Designed for use with Clippard manual, airpiloted, electrical or mechanical actuators, or combinations
Detented Momentary Momentary
Clippard Instrument Laboratory, Inc. 877-245-6247
124
Toggle Plastic Plastic Plastic ENP Steel ENP Steel ENP Steel
4-Way TV-4DP TV-4MP TV-4DMP TV-4DPH TV-4MPH TV4DMPH
MASCOT产品选型样本

201 支架 202 气缸 210 调节螺钉 211 执行机构推杆 213 行程刻度牌 225 活塞 227 弹簧扣 228 执行机构推杆垫片 229 弹簧 248 调节螺钉垫片 249 阀杆夹 253 支架衬套 256 固定环 271 活塞O形环 272 活塞推杆O形环 274 支架O形环 275 执行机构推杆O形环 348 执行机构推杆锁紧螺母
锻造
锻造车间的能力包括落锤锻造和自由锻造直径最大至1000mm的各种标准材料 和特殊材料,制造成阀盖、法兰、阀塞和阀座环。
配合
诸如大型加工中心和数控机床(CNC)等扩展 设备能够生产各种不同尺寸的阀组件。
涂装
可以满足各种不同的涂装要求,比如标准涂装、用于海上服务的厚涂层涂装,以及用 于高温场合的涂装要求。
MASCOT Industrial 15A Randor Street Campbellfield, Victoria 3061 Australia
Tel: +61 3 9357 6555 | Fax: +61 3 9357 6566 Email: sales@ | Web: 本手册仅供信息参考,我们会努力确保资料的准确性和所提供技术规格的精确度, 但手册内容不作为对 于产品本身的解释或担保。MASCOT Industrial保留对产品设计的更改或改进的权力,本手册中产品信息 和技术规格如有变更,恕不另行通知。MASCOT Industrial对产品的选型,使用和维护不予负责。产品的
高端技术 紧密关断
澳大利亚的制造能力
高可靠性 值得信赖
Page 2
源自澳大利亚的制造能力
MASCOT公司所具有的源自澳大利亚的制造能力包括针对困难工况,应用多种 材料和特殊设计,制造压力等级为ASME CL150至CL4500,尺寸范围由0.5” 至36”的球阀以及2.0”至48”的旋转阀(蝶阀、V形球阀、偏心旋塞阀)。 澳大利亚企业利用供应商合作关系来完成铸件的生产和阀组件的加工 这使加工车间的工作量更具弹性并且大大减少了生产交付周期。 与合作伙伴迄今二十年的合作使MASCOT公司在高品质和及时交付表现上取得 了有证明的良好记录。
MOKVELD轴流式控制阀及常见问题分析

V
L K流 E O 制 阀 及 常 见 问 题分析 MO 轴 式控
王 陈让
,
,薛荞荞2 ,吴乐3 ,赵壹
`
1 3
中石 油 北 京 天 然 气 管 道 有 限 公 司 ; 2 延 长 石 油 管道 运 输 第一 输 气 分公 司 ; 4 吴 起 县 飞 龙租 赁 有 限 责任 公 司
,
LD
以 M O KV E
。
Z M O KV E L D
、
、
、
、
,
。
,
,
。
,
。
,
,
,
。
,
,
,
。
,
、
,
。
、
,
使 密封 圈 内 的流 体 被 压 紧 在 流 量较低 的情况 下 很难 起 压密 封 具 有非 常好 的密封效果 2 3 3 较高 的防 水 击 能 力 与 其 它 类 型 的 控制 阀相 比 M O K V E L D 控制 阀 内部精 确 的 弹 簧设 计 和 过 流面 积 的 巧 妙 设 置 使 得 其具 有 更 加优 异 的动 态 特 性 因 此 M O K V E L D 控制 阀可 以 迅 速 地 对 回 流的流 体作 出响 应 同时 确 保 阀门 关 闭 时 无 撞 击 降低 了 水 击 现 象 对 阀门 的破 坏程 度 在 同样 的流 量 负 加 速 度下 M O K V E L D 控制阀 中流 体 的 倒 流 速度远小于 其 它 控制阀 水 击 的大 小 又 和倒 流速度 成 正 比 因 此 M O K v E L D 控制阀关 闭产 生 的水 击 会 比 其 它 控制 阀小 3 M O KV E L O 控 制 阀的常见 问 题及 处 理 3 1 阀门有 内漏 或外 漏 现 象 在 使 用 过 程 中 如果 密 封线 圈 损坏 则 会 造成 阀 门 的轻 微 内 漏 为 了检查 阀门是 否 内漏 需 要连续将 阀门开 关 几次进行检查 如有 必 要则 需 要 厂 家 更 换密封 圈 如果 阀门处有 外 漏 只 能 更 换 密封 圈 如果 有 严 重 的泄 漏 现 象 则要 检查 阀门是 否 损坏或 活塞 是 否被 卡住 3 2 阀门 动作 不正 常 造成 阀门动 作 不正 常 的原 因 是 多 方 面 的 如果 执行机 构 控制 部 分 出现 问题 则 需 要 对 电力 气 源 等执行机 构 部 分 进行必 要 的检 查 如果检查发现阀门损坏 阀门活塞或 者执行器 活塞 卡住 则 需 要 专 门 的 工程 师 将 阀门从管线上 拆 下来 进行 维 修 ; 如果 不 是执行 机 构 和 阀门 的问题 则 需 要 对 Z T D I C 进行 检查 确认 其定位器 中 的 否 目 菜单 是 在 根 录层 其 工作 模 式是 否 正确 不正 确 的话 需 要 对 其 进行重 新 选择 3 3 控制 阀压 力波动范 围大 a M O K v E L D 控制 阀 的可 控压 力一般 在负 0 0 5 M p 到正 0 0 5 Ma P 比 之 间 能够 较精确 的对压 力 进行 调 节 如果在工作中发现控制阀 I D C 智能定位器 中的死 区 和 中公 的压 力波动范 围较大 则 需 要 对 T Z 否 差 带 进行检查 看 其 设定值 是 满足要 求 ; 如果 均无 问题 则 需 要重 I D 参数 直到 控制阀 的压 力波动恢复 正常 新设 定 P 3 井 冰堵造成 的控制 阀损坏 M O K V E L D 控制 阀内部笼筒 和 活塞 之 间结 构 紧密 如果 气质水 露点 不达 标 在调 压节 流时 会造成冰堵现 象 尤 其 在北 方 较 寒 冷 的地 区 冰堵现 象更 是 时有 发 生 如果 出 现这种情况 需 要 迅 速切 换 到备 用 支 路 进行 小 幅度 节 流 降压 ; 为 了有 效 预防 冰堵现 象 的发 生 可 以 对调 压撬进行 电伴 热保 温 或用 水 套 炉对 天 然气进行 预热
莫克威尔德轴流式控制阀说明--四川省国茂科技-王敏
莫克威尔德轴流式控制阀四川国茂科技有限公司王敏翻译前言莫克威尔德对控制阀的开发研究和现场应用已经有三十多年的历史。
莫克威尔德控制阀是高质量的机械设计与对现场需要深刻领会的结晶,它广泛应用在石油和天然气的生产和加工行业,以及几乎所有油气产品的运输、分配和储存工艺系统中。
“轴流”是指流体到控制区以前在阀的内体和外体之间有一轴向对称的流道。
轴流式阀门最初设计用于电力发电厂,在1900年初期已开始使用。
莫克威尔德认识到轴流原理的突出优点,在1955年将它应用于控制阀的设计,并且在应用于石油和天然气工业上的轴流式阀门的设计和开发上处于领先地位。
莫克威尔德轴流式控制阀广泛应用于世界各地的油气生产全过程:生产、处理、运输、储存和分配。
流体介质从原油到炼厂产品,从高油气比的多相流体到高含砂的天然气,以及从饮用水到腐蚀性极强、杂质含量高的生产污水。
莫克威尔德已向世界最大的原油处理厂、液化天然气厂、天然气储存站、调压站、压缩机站和泵站提供了控制阀。
一:性能卓越的控制阀莫克威尔德轴流式控制阀坚固耐用、低维护、高性能,优秀的设计使它在各种应用场合的总效率都非常高。
由于采用轴向对称流道,完全避免了间接流和流向不必要的改变。
因此,大大降低了噪音和紊流的形成,并可以防止上游未经过处理的流体腐蚀阀门。
轴流式设计与传统设计相比,最大限度地提高了单位直径上的流通能力。
1零泄漏级密封即使在最恶劣的工作条件下,莫克威尔德控制阀都能在全压力范围内保持关闭严密。
在要求控制阀必须维持100%严密关断的应用场合,莫克威尔德控制阀专利密封系统的可靠性具有无与伦比的记录,即使在超期使用也能做到这一点。
该特性与执行机构的种类无关。
2压力平衡flang所有型号的莫克威尔德控制阀都装有压力平衡活塞。
这意味着操作的轴向力完全与阀门两端的压力无关,因此与传统控制阀相比,使用扭矩较小的执行结构就能达到快动的目的。
而且,在总体设计上,活动部件比较少,在有特殊要求的情况下,允许冲程的时间非常短,例如压缩机的喘振控制。
MOKVELD轴流式电动调节阀的操作及维护

MOKVELD轴流式电动调节阀的操作及维护摘要:MOKVELD轴流式电动调节阀在西南油气田分公司输气管理处中大型输气站中使用较广。
在输气站场上起着控制天然气压力和流量的作用。
本文重点分析输气管理处成都作业区使用的MOKVELD 电动调节阀的结构、特点、控制原理、维护,可供输气站的技术人员进行设备维护和保养。
关键词:MOKVELD电动调节阀结构;特点;原理;维护1 MOKVELD电动调节阀1.1 MOKVELD电动调节阀的结构MOKVELD电动调节阀是轴流式调节阀中的一种,它是由电动执行机构、阀外体、阀内体、阀杆、活塞杆、活塞和笼筒构成(见图1),其中阀外体和阀内体共同构成了阀体,是指一个完整的铸造体阀的内外体之间,有一轴向对称流道。
其中有一个直角式传动机构活塞由活塞杆与阀杆共同构成,通过这个传动机构,可以在导轨内顺着阀门的中心线进行运动,活塞杆与阀杆通过有45 度角的齿条相互啮合,经过阀杆的上下传动来带动活塞杆和活塞在整个行程上的左右运动。
活塞可以保持内外压力平衡是因为活塞的端面上均匀的分布着一些孔洞,因此,在进行运动的时候可以不被轴向间的压力所影响。
1—阀外体;2—阀内体;3—活塞杆;4—阀杆;5—活塞;6—笼筒图 1MOKVELD控制阀结构示意图2 MOKVELD 调节阀具有的特点2.1 介质的轴流性采用的轴向对称流道方式防止了对间接流和流向之间不必要的改变,大幅度的提高了单位直径上的流通能力,对噪音和紊流的形成有了明显的降低作用,对上游未经过处理的流体对阀门的腐蚀也进行了有效的降低作用。
2.2 零泄漏级密封密封系统运用的是自紧式的压力设计,两个密封环构成了阀门的密封性,并由一根弹簧进行预紧,这种设计可以使在关闭阀门的时候,通过上游流体压力将密封圈进行压紧,进一步提高的密封效果,具有一定的特殊性。
2.3 压力平衡活塞内外的压力的平衡是因为活塞端面分布的一些孔洞, 在进行左右运动时,与阀门两端的压力无关,为了达到快动的目的,这时候可以使用扭矩较小的执行结构。
Rexroth ED02系列压力调节阀 说明书

产品手册2Bosch Rexroth AG | Pneumatics压力调节阀 → 电气比例阀系列 ED02粗体字标识的材料编号从德国的中心仓库起即可使用,详细信息请见购物篮气动产品-目录,在线PDF,制定于 2011-11-05, © Bosch Rexroth AG,保留更改权利安装组件, 用于安装板103Bosch Rexroth AG | Pneumatics压力调节阀 → 电气比例阀E/P压力调节阀, 系列 ED02▶ 压缩空气 接口 出口: G 1/8, 1/8 NPTF ▶ 电子连接: 通过信号接口 ▶ 信号连接: 输入和输出, 多芯插头, M12, 5-針粗体字标识的材料编号从德国的中心仓库起即可使用,详细信息请见购物篮气动产品-目录,在线PDF,制定于 2011-11-05, © Bosch Rexroth AG,保留更改权利00123883结构特点提动阀控制方式模拟量合格证书CE认证环境温度 最小值/最大值+0°C / +50°C 最低/最高介质温度+0°C / +50°C 介质压缩空气颗粒大小 max.50 µm 压缩空气中的最大含油量 1 mg/m³安装位置±α = 0 - 90° ±β = 0 - 90°进气压力见下表工作电压DC 24 VDC电压公差-20% / +20%允许的脉动5%功率消耗 max.0,3 A 防护等级 带有接线盒 / 插头IP 65压缩空气 接口 人口G 1/8, 1/8 NPTF 压缩空气 接口 出口G 1/8, 1/8 NPTF 排气类型未收集, 带有消音器重量0,32 kg材料:外壳铝材-压铸件; 钢密封氢化-丙烯腈-树胶4Bosch Rexroth AG | Pneumatics压力调节阀 → 电气比例阀E/P压力调节阀, 系列 ED02▶ 压缩空气 接口 出口: G 1/8, 1/8 NPTF ▶ 电子连接: 通过信号接口 ▶ 信号连接: 输入和输出, 多芯插头, M12, 5-針Array粗体字标识的材料编号从德国的中心仓库起即可使用,详细信息请见购物篮气动产品-目录,在线PDF,制定于 2011-11-05, © Bosch Rexroth AG,保留更改权利5Bosch Rexroth AG | Pneumatics压力调节阀 → 电气比例阀E/P压力调节阀, 系列 ED02▶ 压缩空气 接口 出口: G 1/8, 1/8 NPTF ▶ 电子连接: 通过信号接口 ▶ 信号连接: 输入和输出, 多芯插头, M12, 5-針粗体字标识的材料编号从德国的中心仓库起即可使用,详细信息请见购物篮气动产品-目录,在线PDF,制定于 2011-11-05, © Bosch Rexroth AG,保留更改权利6Bosch Rexroth AG | Pneumatics压力调节阀 → 电气比例阀E/P压力调节阀, 系列 ED02▶ 压缩空气 接口 出口: G 1/8, 1/8 NPTF ▶ 电子连接: 通过信号接口 ▶ 信号连接: 输入和输出, 多芯插头, M12, 5-針粗体字标识的材料编号从德国的中心仓库起即可使用,详细信息请见购物篮气动产品-目录,在线PDF,制定于 2011-11-05, © Bosch Rexroth AG,保留更改权利00125477E/P电气比例阀根据模拟量设定值调整工作压力。
艾默生 GULDE 7200 V 型控制球阀 数据表

GULDE 7200 V 型控制球阀旋转阀产品样本2023年9月GULDE 7200 V型控制球阀是一款适用于蒸汽、液体、气体或纸浆和造纸工业关键工况的调节球阀,尤其适用于含纤维、颗粒浆液、高粘性溶液和其他具有特殊特性的流体调节应用工况。
产品特点图1 – 7200 V 型控制球阀配Bettis RPX 系列执行机构 和3800SA 智能阀门定位器GULDE 7200 控制阀旋转阀的设计使 V 型切口球和阀座之间产生剪切作用,令操作平稳、无阻塞。
采用直通式流道设计,提高了阀门的流体流通能力。
单阀座设计,驱动扭矩比典型的固定球阀门要低,因此具有操作容易,所需执行机构的成本低等优点。
两种阀座设计:-双层阀座,提供 ANSI/FCI 70-2 IV 级关断,用于对关断 等级要求比较高的工况。
-整体阀座,提供 ANSI/FCI 70-2 II 级关断,适用于高速和磨蚀性或侵蚀性工况。
V 型切口球具有较高的可调比和平稳的节流作用。
符合 ISO 5211 标准的执行机构安装法兰。
高强度不锈钢阀杆,适用于重载和高刚度的工况。
多种填料可选,无需拆卸阀门或执行机构即可轻松调整。
阀杆上的轴套保证了阀门具有耐久性、平稳性和易操作性。
分体式阀体保证了球和阀座配合的同轴性,更有利于内漏的控制。
花键连接可最大程度地减少轴和球芯的空程,从而实现出色的控制性能G7200B0CN标准规格产品结构图GULDE 7200 控制阀阀体连接件螺柱螺母填料组件轴套阀体端盖螺母螺柱阀座垫片密封垫球芯从动轴下轴套从动轴垫片从动轴调整垫片支撑垫下端盖螺母螺柱止推垫片支架填料压环螺栓支架填料压盖螺栓驱动轴执行机构9212021图2 – 7200控制阀结构2023年9月表1: 7200 V 型控制球阀规格3 2023年9月GULDE 7200控制阀V 型口阀门是一种单阀座设计,扭矩比典型的固定球式设计的阀门低,具有便于操作、降低执行机构成本等优点。
有两种独特的阀座设计可供选择:阀座选择图4 – 整体阀座图3 – 双层阀座ANSI/FCI 70-2 IV 级关断适用于恶劣的工作条件ANSI/FCI 70-2 II 级关断适用于高速和磨蚀性或侵蚀性工况图7 – V 型口阀门的固有流量特性为修正等百分比特性GULDE 7200 控制阀阀杆密封填料固有流量特性V 型组合密封填料有“自封”作用,当液体压力作用时压力使V 口改变接触状态和加大接触应力,使V 型圈与阀杆接触的更紧密,介质就更难通过,即使通过一道V 型圈,压力也降低了许多,再通过二道V 型圈,压力再次降低,如此继续,内压将消耗殆尽,泄漏被阻止,产生很好的密封效果。
莫克维迪止回阀原理--国茂科技--王敏

莫克维尔德止回阀工作原理:止回阀作为一种非关键设备,被广泛用于防止下游管线和储油设施的倒流,以及防止由于泵反转而使得密封和电机受损。
早期的设计基于简单的可摆动瓣和板,主要适用于低压或者一些小型的系统。
保护管线系统的应急保护设备,随着大管径的气、液传输管道建设项目的增加,以及管道的压力损失和运营成本的降低越来越重要,也就导致了对止回阀工艺的剧烈的变化。
这些变化和要求是一般止回阀难以做到的。
莫克维尔德止回阀久经考验,用一丝不苟的设计满足这些不断出现的新要求。
本着相同的风格用于莫克维尔德的品控和截流阀的设计基于轴流的概念。
“轴流”是指流体到控制区以前在阀的内体和外体之间有一轴向对称的流道。
莫克维尔德止回阀已用于石油,天然气,石化和水处理,并在未来的发展设计上已经处于领先。
莫克维尔德止回阀被认为是所有如防止处于低压的旋转设备或系统的压力损失的关键设备的标准要件。
介质范围从石油到炼厂产品,从多相流体到含砂天然气,从饮用水到高腐蚀性的生产污水。
莫克维尔德提供的止回阀已经用于世界上最大的水和原油管线,天然气传输系统,储气设施,液化天然气和烯烃生产厂。
莫克维尔德止回阀同时被广泛用于主要的石油和天然气公司,化工工业和水传输等公司。
莫克维尔德止回阀的特点:莫克维尔德轴流式止回阀的设计有如下特点:低压力损失全开启流体通道和高恢复率的文丘里形的阀体带来的是非常低的流体总压力损失。
低压降可以直接降低泵或压缩机的操作成本。
高稳定性专利的文丘里形设计使得莫克维尔德的止回阀在工作时尤为稳定。
开启的特性保证了即便在流体低流速和全行程过程中的阀门的完全平稳开启。
高紧密性阀体的软密封以及金属对金属的密封面确保了本阀门达到了100%的严密关断。
高安全性阀体的法兰和内壳由一个整体的高刚性铸件铸成,内部结构设计基于声学基础的机械工程原理,从而避免了因阀门组件的松散而损坏旋转设备的风险。
本阀门同时也获得了防火认证。
缓闭操作由于独特的工作原理,本止回阀在所需状态下可以平顺并稳定地响应。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MOKVELD轴流式控制阀的特点及常见问题处理
1 川气东送站场压力控制系统简介
川气东送站场压力控制系统是由安全切断阀(SSV)、监控调压阀(PCV)、工作调压阀(PV)按照从上游至下游的顺序,串联在一起的安全、监控式调压系统(调压橇)。
安全切断阀OSE、监控调压阀FL、工作调压阀MOKVELD为相互独立的设备。
正常情况下,安全切断阀和监控调压阀处于全开位置,由工作调压阀对下游压力进行控制。
当工作调压阀出现故障,无法控制下游压力时,监控调压阀开始工作,以维持下游压力的安全范围。
若监控调压阀也出现故障,不能控制下游压力,安全切断阀则自动切断气源,同时控制机柜开启备用回路,以保证下游管道和设备的安全。
当需要进行流量控制时,控制机柜接到SCADA系统的信号,供气流量超过设定值时,控制机柜和工作调压阀则切换到流量控制状态,此时控制机柜输出控制信号,限制分输流量,见图1。
图1 川气东送站场压力控制系统
2 MOKVELD控制阀
MOKVELD控制阀的结构
MOKVELD控制阀是一种轴流式调节阀,由阀外体、阀内体、阀杆、活塞杆、活塞和笼筒组成,见图2。
阀体包括阀外体和阀内体,是一完整的铸造体,阀的内外体之间有一轴向对称流道,见图2箭头处。
笼筒是减压阀的关键部件,壁面上有许多孔洞,MOKVELD控制阀选用三层笼筒,即笼筒壁面分三层,每层按一定规律分布有许多孔洞,三层壁面按一定的要求组合为一体。
活塞杆与阀杆构成一个90°的角式传动机构(见图2),活塞借助此传动机构在导轨内沿阀门的中心线运动,活塞杆与阀杆上4 5°的齿条相互啮合,阀杆上下传动,带动活塞杆及活塞在全行程上左右运动。
活塞的端面上均匀分布有孔洞,以使活塞内外压力平衡,左右运动时不受轴向压力的影响。
1)阀外体;2)阀内体;3)活塞杆;4)阀杆;5)活塞;6)笼筒
图2 MOKVELD控制阀结构示意图
MOKVELD控制阀的特点
介质的轴流性
由于采用轴向对称流道,完全避免了间接流和流向不必要的改变,最大限度地提高了单位直径上的流通能力,大大降低了噪音和紊流的形成,并可以防止上游未经过处理的流体腐蚀阀门。
零泄漏级密封
密封系统采用自紧式压力设计,阀门的密封由两个密封环组成,并由一根弹簧预紧,这种特殊的设计可以使阀门在关闭时,密封圈在上游流体压力下被压紧,从而达到非常好的密封效果。
压力平衡
活塞的端面上均匀分布有孔洞,以使活塞内外压力平衡,左右运动时与阀门两端的压力无关,使用扭矩较小的执行结构就能达到快动的目的。
执行机构
在活塞上有活塞杆,活塞杆上有45°角的啮齿,活塞杆由有相同啮齿的阀杆操作。
阀杆和活塞垂直正交,当阀杆向上移动时,阀门开启,反之,阀门关闭。
MOKVELD控制阀的控制原理
MOKVELD控制阀是轴流式活塞型控制阀,活塞在笼筒内被导引,节流发生在活塞边缘与笼筒的孔口之间,气流来自笼筒外,因此在笼筒层孔内气流速度很高,笼筒选用的材质高度抗腐蚀与磨蚀。
密封系统采用自紧式压力设计,主密封圈位于笼筒的最前端,活塞在全行程上被导引,当被推动穿过主密封圈时,阀门前后的差压强迫主密封圈紧贴活塞壁而紧密关闭阀门。
阀杆和活塞垂直正交,阀杆借助活塞杆上45b的齿条传动活塞杆,活塞通过活塞杆的引导在笼筒内左右运动,当执行机构驱动阀杆向上运动时,活塞向后移动,阀门打开;反之,则关小阀门。
控制阀采用了带气动阀门定位器的活塞执行机构,气源装置给执行机构提供了一定压力的压缩空气,电/气转换器把从控制室来的4~20mADC信号转换为~的标准气动信号,传输信号为电信号,现场操作为气动信号。
执行机构接受控制信号,转换成相应的直线位移输出,通过推杆带动阀杆上下移动,从而使阀门开度在全行程上变化。
3 TZIDC-200智能定位器
TZIDC-200智能定位器结构特点
TZIDC是一种具备通信能力的、可电子配置参数的定位器,安装于气动直行程或角行程执行机构上。
其特点为设计小巧紧凑,采用模块化结构,并具有极好的性价比。
控制参数全自动确定并与终端控制元件适配,能够节省大量调试时间并达到最优控制。
带有后置气动放大器的I/P模块用来控制气动执行机构。
I/P模块通过调节三位三通阀,将从CPU发出的定位电信号按比例转换为气动信号。
执行机构增压或减压的调整是连续的,因此可以达到极好的控制效果。
当到达设定点时,三位三通阀锁定在中间位置,将耗气量减到最小。
定位器有一个内置的操作面板,提供2行LCD和4个按钮,用于本地参数配置、调试及运行监控。
用户也可使用适当的组态程序和通过通信进行操作。
TZIDC-200智能定位器工作原理
TZIDC定位器采用微处理器对给定值和位置反馈值进行比较,如果检测到偏差,其利用一个5步开关程序来控制压电阀,压电阀进而调节进入执行机构气室的气流量。
微处理器根据偏差的大小和方向输出一个电控指令给压电阀,压电阀将控制指令转换为气动位移增量,当控制偏差很大时(高速区),定位器输出一个连续信号;当控制偏差不大(低速区)时,定位器输出连续脉冲;当控制偏差在允许偏差范围内(自适应或可调死区范围内),则没有控制指令输出。
TZIDC-200智能定位器几个重要参数
图3为TZIDC-200智能阀门定位器参数调整示意图。
图3 智能阀门定位器参数调整示意图
检查行程参数
执行机构和定位器安装完以后,要检查现场执行机构是直行程还是角行程,同时要查看定位器中此项的参数设定是否与现场安装一致。
这一点很重要,因为在自动调整过程中,定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
川气东送站场MOKVELD控制阀所采用的执行机构均为直行程式,且为弹簧开气动执行机构1VO型,定位器中参数设定也由厂家完成,只需检查验证。
方法为:同时按住↑和↓键;点击ENTER键;等待3s,计数器从3计数到0;松开↑和↓键;程序自动进入配置菜单。
使用↑和↓键查看定位器安装形式为直行程或角行程。
进行自动调整
启动自动调整程序(执行器或阀门安装完系统后最好通过此程序重新整定)。
按住MODE键;点击↑键一次或多次,直到显示出“”;松开MODE键;按住ENTER键3s直到计数器倒计数到0;松开ENTER 键,自动调整程序开始运行,显示器显示正在进行的程序语句号;自动调整程序顺利结束后,显示器显示“COMPLETE”。
在自动调整过程中,如果遇到故障,程序将被迫终止并显示出故障代码,根据故障代码即可检查出故障原因。
也可以人为地强制中断自动调整程序。
公差带和死区的调整
公差带和死区的设定直接影响着阀门的控制精度,公差带为%~10%,死区为%~10%,出厂时一般公差带和死区均设定为最小值。
但有时也不设为最小值,例如川气东送站场所用定位器出厂时,死区设定值就较高,为1%~3%,在此设定值下,如果出口压力要求,则其波动范围可达(±)MPa,无论怎样调整PID参数,都无法将压力控制稳定。
调整为%后,压力可稳定在(±)MPa。
公差带和死区的调整方法同上,进入“”调整公差带和死区。
4 MOKVELD控制阀常见问题及处理
冰堵
由于MOKVELD控制阀内部笼筒与活塞之间结构紧密,如果气质水露点不达标,通过控制阀节流,温度骤然下降,会造成冰堵现象,尤其在北方较寒冷地区新建管道投产初期,冰堵现象时有发生。
如果发生冰堵,不可用现场手动操作,强加外力使控制阀运动,这样很可能损坏控制阀。
简单的方法就是用热水浇开、切换至备用路或利用调压橇前的节流设施进行小幅度节流降压后再进行调压。
比较长远的办法是利用水套炉对天然气进行加热或对调压橇增加电伴热保温。
压力波动范围大
MOKVELD控制阀是比较精确的压力调节阀,一般可控制压力在设定值±范围内。
如果压力波动范围较大,那么就要检查TZIDC-2 00智能定位器中公差带和死区的设定值是否满足要求,方法如前文所述。
如果公差带和死区均无问题,那么就要对PID参数重新进行摸索设定,直至满足要求。
阀门无动作
给信号后,阀门无动作,这种情况原因比较多。
执行机构控制部分出现故障,如遇这种情况,一般检查执行机构动力系统,如电力或气源等,对执行机构进行必要的测试;执行器活塞或阀门活塞被卡住了,或者阀门内部有损坏,这时要将阀门从管线上拆下来进行内部检查,这种操作要由厂家工程师来完成;阀门和执行机构均无问题,阀门就是无动作,这时要检查一下TZIDC定位器中菜单是否回到根目录一层,并且选择了正确的工作模式,如果菜单不在根目录,那么无论怎样给信号,阀门也不会动作。
阀门轻微内漏
如果阀门有轻微内漏,则可能是密封圈有轻微损坏,这时可以连续将阀门开关几次,检查是否仍然内漏,必要时由厂家更换密封圈。
如果阀门内漏严重,则要考虑阀门活塞是否被卡住或阀门已损坏。
5 结束语
MOKVELD控制阀及其控制系统是一套精细的调压/调流控制系统,其运行稳定可靠、精度高,在日常管理中要加强检查和维护保养,积累运行经验,才能使其更好地发挥作用。