电机正反转及能耗制动指导书
直流电动机的能耗制动
1.电动运行状态:当电磁转矩Tem的方向与转速n方向相同时,
电机运行于电动机状态,电磁转矩为驱动转矩。
2. 制动:当电磁转矩Tem的方向与转速n的方向相反时,电机 运行于制动状态,电磁转矩为制动转矩。 3. 制动目的:快速停车;减速;起重机下放重物等。 4. 制动方法:能耗制动、反接制动和回馈制动。
第2章 直流电动机的电力拖动
2.4 他励直流电动机的制动
教学内容: 2.4.1 能耗制动
2.4.2 反接制动 2.4.3 回馈制动 2.4.4 直流电动机的反转
教学目的与要求: 1. 掌握制动的概念
2. 掌握能耗制动和反接制动过程 3. 了解回馈制动的特点 4. 掌握直流电动机的正反转
第2章 直流电动机的电力拖动
0
C
电动机拖动反抗性 负载,电机停转。
TL
Tem
若电动机 带位能性 负载,稳 定工作点
第2章 直流电动机的电力拖动
讨论: n R a R B Tem 0 Tem 2
C E CT N
(1) 改变制动电阻RB的大小可以改变能耗制动特性曲线的斜 率,从而可以改变制动转矩及下放负载的稳定速度。 (2)R B 越小,特性曲线的斜率越小,起始制动转矩越大,而下 放负载的速度越小。 (3)制动电阻越小,制动转矩大,制动时间短,工作效 率高,但 R B过小,使制动电流越大。
U
电动
S
I
Tem
n
If
TemB
第2章 直流电动机的电力拖动
二、能耗制动时的机械特性 n R a R B Tem 0 Tem 2
CE CT N
三、能耗制动过程分析
n
制动瞬间 工作点 电动机状态工 作点
课题四能耗制动正反转控制线路

欢迎共阅编号:任课教师:教研室主任签字:课题名称:课题三相异步电动机能耗制动正反转控制线路讲授新课:课题三相异步电动机能耗制动正反转控制线路一、三相异步电动机能耗制动正反转控制线路的设计正、反转控制线路采用双重联锁,由KM1、KM2来完成。
能耗制动控制线路由KM3、KT来实现,要求有短路、过载保护,按时间原则进行控制。
二、三相异步电动机能耗制动正反转控制线路(1)M1 为电动机。
KM1、KM2为电机控制接触器。
KM3制动用接触器。
FR 热继电器、SB1---SB2控制按钮。
KT为时间继电器。
R为制动电阻(2)保护功能:短路保护----QS空气开关FU1 FU2熔断器SB1常开闭合→KM3线圈得电→KT线圈得电→→KM3自锁触头闭合自锁KM3主触头闭合→电动机M接入直流电能耗制动KM3联锁触头分断对KM1联锁→KT常闭触头延时断开→KM3自锁触头断开KM3主触头断开→电动机M停转1S制线路的各种工作状态及操作方法。
(2)在教师指导下,弄清能耗制动控制线路电器元件安装位置及走线情况;结合机械、电气、液压几方面相关的知识,搞清能耗制动控制线路电气控制的特殊环节。
四、三相异步电动机能耗制动正反转控制线路装配1.步骤(1)检查电器元件质量并固定。
(2)正确进行布线操作。
2、控制要求:如图4-1所示,明确线路的构成及工作原理后,先对电路图中所用的元器件进行布置和固定,能耗制动正反转控制线路的布置图,对线路图进行装配,调试及检修。
3、考核要求:(1) 根据能耗制动控正反转制线路的电路图,选用安装和检修所用的工具,仪表和器材;(2) 正确编写安装步骤和工艺要求;1、讲解能耗制动的意义;2、讲解能耗制动控正反转制线路的组成;3、讲解能耗制动正反转控制线路的工作原理;4、讲解能耗制动正反转控制线路的动作过程;三、实操训练安排1、安排第一组学生进行实操训练(约45~50分钟)讲评第一组学生的实习完成情况(约10~15分钟)2、安排第二组学生进行实操训练(约45~50分钟)讲评第二组学生的实习完成情况(约10~15分钟)3、安排第三组学生进行实操训练(约45~50分钟)3、强调能耗制动正反转控制线路装配步骤;4、讲解能耗制动正反转控制线路的布置图。
电机正反转及能耗制动指导书
实训项目名称:电机正反转及能耗制动项目编号:03一、实验目的:1、熟悉GX DEVELOPER编程软件、仿真软件;2、熟悉GT WORK3编程软件、仿真软件3、用PLC构成电机正反转及能耗制动。
4、通过仿真验证程序的正确性。
二、实验设备、仪器、工具、量具电脑仿真实训。
应用FX编程软件GX DEVELOPER、FX仿真软件GX DESIGNER6和触摸屏编程和仿真软件GT WORK3。
三、实验原理或实验要求:1、用GX DEVELOPER编程软件、GX DESIGNER6仿真软件实现程序的编制,调试,仿真。
从而验证PLC程序的正确性;2、用GT WORK3编程软件、仿真软件实现输入、输出设备的仿真,更形象的展示其工作过程。
四、实验内容:1)按正转按钮,KM1闭合,电机正转。
2)按反转按钮,KM2闭合,电机反转。
3)按停止按钮,KMZ闭合,电机断电,延时10秒,KMZ断开,观察停止时间。
要求用PLC程序实现五、实验步骤。
1.I/O地址分配输入:停止----X004; 正转启动按钮----X005; 反转启动按钮----X006; 输出:KM1-------Y1;KM2-------Y2;KMZ-------Y0;2.PL C程序见附件1:电机正反转及能耗制动PL C程序。
3.输入PLC程序,进入GX DEVELOPER编程软件、仿真软件界面,具体操作步骤如下:A 点击工程按钮→创建新工程→选项。
PLC系列:FXCPU;PLC类型:FX2N(C); 程序类型:梯形图逻辑→确定。
B 输入PLC程序,检查正确无误C 编译程序D 仿真.此时LADDER LOGIC TOOL中,RUN框变成黄色,运行状态:RUN。
同时PLC程序运行。
若点击STOP按钮,则程序停止运行。
4.在界面LADDER LOGIC TOOL中,选择菜单启动→软元件X; 软元件Y;实训项目名称:电机正反转及能耗制动项目编号:03这两个框中的数值即时软元件X和软元件Y的编号。
实验指导书1-正反转控制-降压启动控制.

一、三相异步电动机的正反转控制线路一、实验目的1、通过对三相异步电动机正反转控制线路的接线,掌握由电路原理图接成实际操作电路的方法。
2、掌握三相异步电动机正反转的原理和方法。
3、掌握手动控制正反转控制、接触器联锁正反转、按钮联锁正反转控制及按钮和接触器双重联锁正反转控制线路的不同接法,并熟悉在操作过程中有哪些不同之处。
二、选用组件 1、实2、屏上挂件排列顺序:D61、D62三、实验方法1、倒顺开关正反转控制线路:(1) 旋转控制屏左侧调压器旋钮将三相调压电源U 、V 、W 输出线电压调到220V ,按下“停止”按钮切断交流电源。
(2) 按图8-4接线。
图中Q 1(用以模拟倒顺开关)、FU 1 、FU 2、FU 3选用D62挂件,电机选用WDJ24(△/220V )。
(3) 启动电源后,把开关Q 1合向“左合”位置,观察电机转向。
(4) 运转半分钟后,把开关Q 1合向“断开”位置后,再扳向“右合”位置,观察电机转向。
图8-4 倒顺开关正反转控制线路2、接触器联锁正反转控制线路:(1) 按下“停止”按钮切断交流电源。
按图8-5接线。
图中SB 1、SB 2、SB 3、KM 1、KM 2、FR 1选用D61挂件,Q 1、FU 1、FU 2 、FU 3、FU 4选用D62挂件,电机选用WDJ24(△/220V )。
经指导老师检查无误后,按下“启动”按钮通电操作。
(2) 合上电源开关Q 1,接通220V 三相交流电源。
(3) 按下SB 1,观察并记录电动机M 的220V转向、接触器自锁和联锁触点的吸断情况。
(4) 按下SB 3,观察并记录M 运转状态、接触器各触点的吸断情况。
(5) 再按下SB 2,观察并记录M 的转向、接触器自锁和联锁触点的吸断情况。
图8-5 接触器联锁正反转控制线路3、按钮联锁正反转控制线路:(1)按下“停止”按钮切断交流电源。
按图8-6接线。
图中SB 1、SB 2、SB 3、KM 1、KM 2、FR 1选用D61挂件,Q 1、FU 1、FU 2 、FU 3、FU 4选用D62挂件,电机选用WDJ24(△/220V )。
电机星三角启动、调速、正反转、制动实验报告
电机与拖动综合实践小型三相异步电动机电力拖动系统设计指导教师:时间:2018 年01 月05 日目录一、设计任务与要求 (1)二、方案比较 (1)三、电路图和电路原理说明 (1)四、调试问题分析和结果记录 (1)五、电气控制柜电气接线 (1)六、收获体会 (1)七、小组分工 (1)一、设计要求1、用PLC对异步电动机拖动系统进行控制。
实现星三角降压启动、调速、正反转换向、能耗制动——整个工作流程的设计。
拖动系统除了能完成以上基本功能外,还要有短路保护、过载保护设计。
2、选用额定电压为220V,额定电流为0.5A的交流异步电动机作为控制对象。
要求带一直流发电机负载进行实验。
二、方案比较本课程设计中,设计要求中已限定了采用星三角降压启动方式启动电机,正反转方案可以采用交换三相中两相接线来实现,而制动方案题中要求采用能耗制动,结合实验室所有设备,采用220V交流电经过变压器降压至26V后通过整流桥转换为直流电源,串制动电阻作为能耗制动的电路设计。
故本设计中,需解决解决的为调速方案的选取,方案比对和选取如下。
方案一:调压调速。
这种方式为通过异步电动机的定子三相交流电压大小来调节转子转速。
实验室中主要有两种电机,一种为鼠笼式异步电动机,一种为绕线式异步电动机。
不同于绕线式电动机,鼠笼式异步电动机应采用此种调速方案。
方案二:转子串电阻调速。
实验室中绕线式电机可采用此方案。
转子上串入电阻越大,转速越低,转差率就越大,机械功率在电磁功率中所占比率就越低,效率越低。
本实验中可采用的电阻为100Ω左右。
方案三:交流变频调速。
实验室中提供了变频器供变频调速使用。
变频调速具有如下优点:1调速范围宽,可以使普通异步电机实现无极调速;2启动电流小,启动转矩大;3起动平稳,清楚机械的冲击力,保护机械设备;4对电动机具有保护功能,降低电动机的维修费用;5具有显著的节电效果;6通过调节电压和频率的关系方便地实现恒转矩或者恒功率调速。
三相异步电动机正反转运转控制——实训指导书
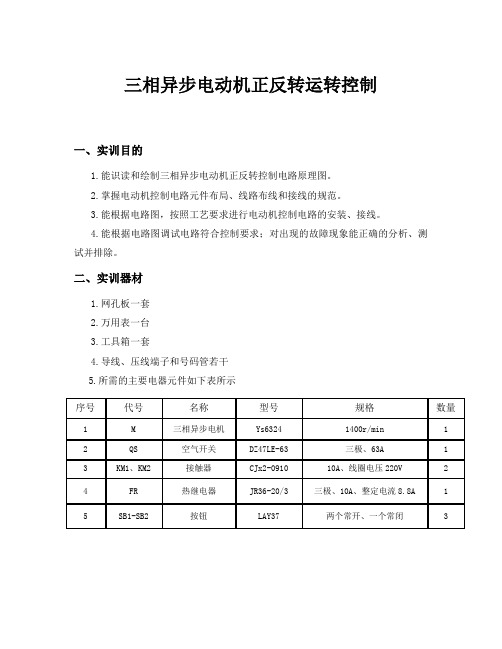
三相异步电动机正反转运转控制一、实训目的1.能识读和绘制三相异步电动机正反转控制电路原理图。
2.掌握电动机控制电路元件布局、线路布线和接线的规范。
3.能根据电路图,按照工艺要求进行电动机控制电路的安装、接线。
4.能根据电路图调试电路符合控制要求;对出现的故障现象能正确的分析、测试并排除。
二、实训器材1.网孔板一套2.万用表一台3.工具箱一套4.导线、压线端子和号码管若干5.所需的主要电器元件如下表所示三、考核要求1.元器件的选择与检测:(1)根据图1所示电路图选择电气元器件,熟悉电路中元器件的名称、型号规格,掌握元器件的测试和使用方法。
(2)熟练使用万用表对选择的元器件进行检查,如有损坏要求更换。
2.布线:正确选用导线,按照图1规范合理布线,导线安装在线槽中,接线端按要求使用压线端子和号码管。
3.线路测试:在不加交流电源时,完成分析与测试。
4.通电试车:在检查无误后,连接上电源线和电动机,按演示控制线路功能。
四、电路图图1 三相异步电动机正反转运行控制线路五、元件布置图图2所示为元器件布置图,QS表示空气开关,KM1、KM2表示交流接触器,FR表示热继电器,XT为端子排,SB为按钮开关SBKM1KM2FR图2 元器件布置图六、操作步骤1.根据图1所示接线图,检查接线是否正确,有无遗漏的地方。
2.布线完成后,在合上主电源之前,首先检查所有压线是不是牢靠,如有松动的地方及时进行压紧。
3.压线检查完成后,合上设备主电源,合上空气开关QS,利用万用表的交流电压档检查三相电源是否正常(此时设备已经带电,注意安全)。
4.按动起动按钮SB1,接触器KM1吸合,电机开始顺时针连续转动。
5.按动停止按钮SB3,接触器KM1断开,电机停转。
6.按动起动按钮SB2,接触器KM2吸合,电机开始逆时针连续转动。
7.按动停止按钮SB3,接触器KM2断开,电机停转。
8.对于调试过程中出现的问题进行总结。
七、安全文明操作要求1.不允许带电操作(通电试车除外)。
课题四能耗制动正反转控制线路
课题四能耗制动正反转控制线路Document serial number【KKGB-LBS98YT-BS8CB-BSUT-BST108】:任课教师:教研室主任签字:课题名称:课题三相异步电动机能耗制动正反转控制线路教学目的:1、正确掌握能耗制动正反转控制线路的工作原理;2、正确进行能耗制动正反转控制线路装配。
德育目标:1、培养学生自主学习,主动学习的能力;2、引导学生逐渐养成勤俭节约的良好作风。
教学重点:星角降压启动正反转控制线路的安装、调试教学难点:掌握能耗制动正反转控制线路的工作原理分析教学方法:讲解法、演示法、现场实习法。
教学过程:课前准备:1.准备实习设备、材料及教学用具;2.检查学生出勤情况,工具及劳动保护穿戴情况;3.集中学生注意力,准备讲授教学内容。
安全教育:1.学习实训教室安全操作规程;2.讲解实训工位的安全注意事项。
讲授新课:课题三相异步电动机能耗制动正反转控制线路一、三相异步电动机能耗制动正反转控制线路的设计正、反转控制线路采用双重联锁,由KM1、KM2来完成。
能耗制动控制线路由KM3、KT来实现,要求有短路、过载保护,按时间原则进行控制。
二、三相异步电动机能耗制动正反转控制线路(1)M1 为电动机。
KM1、KM2为电机控制接触器。
KM3制动用接触器。
FR热继电器、SB1---SB2控制按钮。
KT为时间继电器。
R为制动电阻(2)保护功能:短路保护----QS空气开关 FU1 FU2熔断器过载保护-----FR热继电器欠压保护------KM1 、KM2、KM3接触器零位保护-------KM1 、KM2接触器联锁保护--------KM1 、KM2、KM3实现线路的工作原理如下:先合上电源开关QS正转启动控制:按下SB2→KM1线圈得电→KM1自锁触头闭合自锁KM1主触头闭合→电动机M启动运行KM1联锁触头分断对KM2、KM3联锁能耗制动停转:按下SB1→ SB1常闭断开→KM1线圈失电→KM1自锁触头断开∣KM1主触头断开→电动机M暂时失电∣KM1联锁触头分断对KM3联锁复位闭合SB1常开闭合→KM3线圈得电→KT线圈得电→→KM3自锁触头闭合自锁KM3主触头闭合→电动机M接入直流电能耗制动KM3联锁触头分断对KM1联锁→KT常闭触头延时断开→KM3自锁触头断开KM3主触头断开→电动机M 停转 KM3联锁触头复位→KT 线圈失电→→KT 常开触头复位L1L2L31SN三、三相异步电动机能耗制动正反转控制线路的要求(1)在实习教师的指导下,对能耗制动控制线路进行操作,了解能耗制动控制线路的各种工作状态及操作方法。
任务33直流电动机的启动、反转、调速与制动教材

3.电枢回路串电阻启动 转子回路串电阻启动,如图3-30(a)所示。一般在转速上升过程
中逐级短接切除。 启动开始瞬间,串入全部启动电阻,使启动电流不超过允许值:
二、直流电动机的反转 1.改变励磁电流方向 保持电枢两端电压极性不变,把励磁绕组反接,使励磁电流方
向改变,电动机反转。 2.改变电枢电流方向 保持励磁绕组电流方向不变,将电枢绕组反接,使电枢电流
直流电动机的励磁磁通,可使直流电动机转速升高,这种方法称为 减弱主磁通调速。如图3-33所示。
四、直流电动机的制动 1.他励直流电动机的能耗制动 (1)能耗制动接线图,如图3-34(a)所示。能耗制动的机械特性
曲线如图3-34(b)所示。
通常限制最大制动电流不超过2~2.5倍的额定电流。选择制动 电阻的原则是:
2.降低电源电压启动 降低转子电压启动,即启动前先调好励磁,将施加在直流电
动机转子两端的电压降低,最低电压所对应的人为特性上的启动 转矩T1>T2时,直流电动机就开始启动。直流电动机启动后,再 逐渐提高转子电压,使启动电磁转矩维持在一定数值,保证直流 电动机按需要的加速度升速,其接线原理图,如图3-29(a)所示, 启动工作特性,如图3-29(b)所示。
任务3.3 直流电动机的启动、反转、调速与制动
一、直流电动机的启动 为了满足启动要求,可采取下列三种启动方法:直接启动、转
子回路串电阻启动和降压启动。 1.直流电动机的直接启动
直接启动就是在直流电动机的转子 上直接加以额定电压的启动方式,如图 3-28所示。
对于一般的他励直流电动机,为了限制启动电流,可以采用 转子回路串联电阻或降低转子电压启动的启动方法。
④合上校正直流测功机MG的负载开关S,调节R2阻值,使MG 的负载电流IF改变,即直流电动机M的输出转矩T2改变。
三相异步电动机的正、反转控制实训指导书
三相异步电动机的正、反转控制实训指导书一、实训目的1、掌握三相异步电动机正、反转的控制方法。
2、熟悉常用低压电器。
3、掌握电气线路安装接线方法。
二、实训设备和元器件1、电动机控制线路接线模拟板1块;2、三相异步电动机350w左右、380v1套;3、BV1.0mm2,BVR0.75 mm2导线若干。
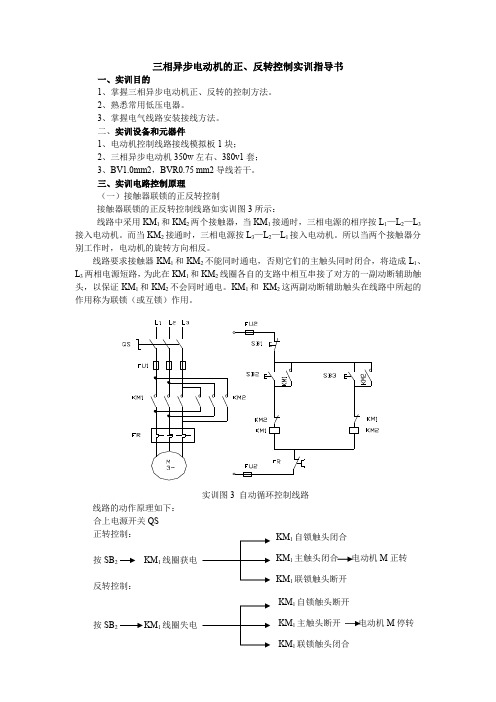
三、实训电路控制原理(一)接触器联锁的正反转控制接触器联锁的正反转控制线路如实训图3所示:线路中采用KM1和KM2两个接触器,当KM1接通时,三相电源的相序按L1—L2—L3接入电动机。
而当KM2接通时,三相电源按L3—L2—L1接入电动机。
所以当两个接触器分别工作时,电动机的旋转方向相反。
线路要求接触器KM1和KM2不能同时通电,否则它们的主触头同时闭合,将造成L1、L3合上电源开关QS正转控制:按SB2KM1线圈获电反转控制:按SB2KM1线圈失电KM1自锁触头闭合KM1主触头闭合电动机M正转KM1联锁触头断开KM1自锁触头断开KM1主触头断开电动机M停转KM1联锁触头闭合按SB 3KM 2线圈获电这种线路的缺点是操作不方便,要改变电动机转向,必须先按停止按钮SB 1,再按反转按钮SB 3,才能使电动机反转。
(二)按钮联锁的正反转控制按钮联锁的正反转控制线路如实训图4所示。
线路的动作原理如下:按下SB按下SB这种线路的优点是操作方便,缺点是易产生短路故障,单用按钮联锁的线路不太安全可靠。
(三)接触器、按钮双重联锁的正反转控制这种线路安全可靠、操作方便、较常用。
其原理图如实训图5所示,动作过程分析略。
四、实训操作内容及要求1、在电动机控制线路模拟板上练习原理概述中,三种电路中的任意两种电路,要求安装时文明操作,注意接点牢靠、接触良好。
KM 2自锁触头闭合KM 2主触头闭合 M 停转 KM 2联锁触头断开 2的动断触头断开 联锁 2的动合触头闭合 KM 1线圈得电 M 正转 1自锁触头闭合SB 3 SB 3动合触头闭合 KM 2KM 1自锁触头断开 电动机M 反转KM 2自锁触头闭合2、每安装完一个电路、经检查无误后,接上试车电动机,通电试操作。
详解异步电机正反转启动能耗制动控制电路

异步电机正反转能耗制动控制电路—详解半波整流单向启动能耗制动控制电路唤时土M对于高手来说,上图一眼就看明白了,可是对于新手来说,可能看起来就有点晕头转向了。
今天就来分析一下半波整流单向启动能耗制动控制电路原理0SB1为停机按钮,SB2为正转启动按钮,SB3为反转启动按钮,KM1为正转启动接触器,KM2为反转启动接触器,KM3为制动接触器,FR为热继电器,KT为时间继电器。
下面来分析一下电路的工作过程:1、正转启动回路:按下按钮SB2后,KM1吸合。
启动回路LJ FUJ FU2T FR热继电器的常闭T KM3常闭T SB1常闭T SB2常开(SB1常开在按下时接通,KM1常开与开关SB2常开并联,这样接触器KM1形成自锁,松开按钮后仍然吸合)T SB3常闭T KM2常闭T KM1线圈接通,正转启动。
2、反转启动回路:按下按钮SB3后,KM2吸合。
启动回路L1T FU1T FU2T FR热继电器的常闭T KM3常闭T SB1常闭T SB3常开(SB3常开在按下时接通,常闭断开,而常闭是串联在正转启动回路中的,SB3常闭断开后,正转回路也会断开,KM1线圈失电,电机停止正转。
KM2常开与开关SB3常开并联,这样接触器KM2形成自锁,松开按钮后仍然吸合)T SB2常闭T KM1常闭(这里就是检查正转电路是否停止,只有停止的时候,KM1上的常闭才能接通,给电路提供了双重保护)T KM2线圈接通(接通后KM2的常闭触点断开,常闭触点是串联在启动回路中的,这样就保证了启动回路完全断开)3、急停回路:按下急停按钮SB1,SB1常闭触点断开,运行控制回路失电,电机停机。
SB1常开触点闭合,急停回路启动,延时继电器KT开始计时,到达时间后,延时继电器常闭断开,急停回路失电。
带能耗制动的双重互锁正反转控制线路工作原理

带能耗制动的双重互锁正反转控制线路工作原理下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!带能耗制动的双重互锁正反转控制线路工作原理1. 引言在工业控制系统中,双重互锁正反转控制线路是一种常见且关键的设计,特别是在需要高度安全性和可靠性的设备中。
几种电动机正反转星三角启动及能耗制动电路

断电/通电延时带直流能耗制动的星—三角起动控制线路
精彩文档
精彩文档
图1原理如下
精彩文档
大功率电动机双向星三角启动及能耗制动电路
大功率的电动机一般使用星三角启动的控制方式,以减少对电网及设备的冲击;为了提高工效,停车时采用能耗制动的方式以利于设备的利用率;本电路的控制要求如下:
1、双向启动均采用星三角减压方式;
2、正、反转均设有点动控制功能;
3、停车设有能耗制动;
4、停车时先将电动机绕组首尾串联,然后进行制动,制动时间由时间继电器控制;
5、点动操作时电动机只能作星接运行,能耗制动不起作用。
精彩文档
精彩文档
精彩文档
精彩文档
精彩文档
正反转星三角启动带能耗制动电路图:
精彩文档。
三相异步电动机的反转与制动

2023年8月26日 星期六
§4-9 三相异步电动机的反转与制动
3、电路安装
接触器KM1线圈 电
电动机正转
按下按钮 SB1
4、频繁反转的缺点
接触器KM2线圈 得电
电动机反转
按下按钮 SB2
2023年8月26日 星期六
§4-9 三相异步电动机的反转与制动
异步电动机在反转瞬间,转子由于惯 性,还朝原方向转动,而定子旋转磁场 方向已经改变,转子绕组与旋转磁场相 对速度为(n1 + n),转子感应电流很 大I2↑→I1↑> Ist,若频繁反转,会使 电机绕组过热,同时使转速产生很大的 冲击,损坏电机。
一、三相异步电动机的反转 1、原理
三相异步电动机的转子旋转方向取决于旋 转磁场方向,旋转磁场方向和电源相序有关, 所以只要改变旋转磁场的旋转方向,就能使 三相异步电动机反转。 2、方法
用倒顺开关、组合开关控制、接触器联锁 控制。来实现,即将电动机两相绕组与交流电 源的接线互相对调,则旋转磁场反向,电动 机跟着反转。
2023年8月26日 星期六
§4-9 三相异步电动机的反转与制动
③ 特点
制动力较强,能耗少,制动较平稳,
对电网及机械设备冲击小;但在低速时
制动力矩也随之减小,不易制动停止,
需要直流电源,常用于机床设备。
⑶再生制动(发电制动)
① 定义:在电动机工作过程中,由于外力 的作用,使n>n1导条切割旋转磁场的方向 相反,则电磁转矩方向与转子旋转的方 向相反,变为制动转矩。
返回
能耗制动电路原理图
2023年8月26日 星期六
§4-9 三相异步电动机的反转与制动
返回
绕线转子异步电动机转子串电阻的反接制动
三相异步电动机正反转启动能耗制动控制电路的安装与接线教案
教学设计
教学过程
教学环节教师讲授、指导(主导)内容
学生学习、
操作(主体)活动
时间
分配
一、二、组织教学 (师生问候)
教师确保设备已经调好,学生能够听见声音
新授知识
新课引入
一、实验目的
1、通过对接触器正、反转联锁控制线路的安装接线,掌握根
据原理图安装接线的方法;
2、掌握三相异步电机正、反转的工作原理
二、实验步骤
电路图
师生问好
作业设计:
用三个按钮控制一台电动机的启动停止,当按下绿色按钮时电动机正传,按下红色按钮时电动机停止。
再按下黑色按钮时电动机反转,按下红色按钮时电动机停止。
布置作业
完成习题册布置作业
三、。
三相笼型异步电动机正-停-反转控制实验指导书

三相笼型异步电动机正-停-反转控制实验指导书一、实验目的及要求1)熟悉控制电路中各电器元件结构、型号规格、工作原理、使用方法及其在电路中所起的作用。
2)通过实验加深对三相异步电动机和正-停-反转控制电路工作原理的理解。
3)掌握三相异步电动机正转和反转控制电路安装接线的步骤、方法、调试及排除故障的方法。
二、实验装置及仪表三、电气原理图实验电气原理图,如图1.1所示。
图1.1 三相电机正-停-反控制原理图四、实验步骤1.熟悉、检查电器元件查看本次实验各电器元件,并将其型号规格等填入表中。
检查各电器元件的质量,用万用表的欧姆档检测各电器的常开、常闭触点的通断情况。
实验一电器元件的型号规格2.按图接线按图1.1主电路和正-停-反转控制电路接线,从空气开关的下端开始自上而下地接线,先接主电路后接控制电路,先串联后并联,先控制点后保护点的接线规律连接,最后接电源进线。
主电路使用导线的粗细按电动机的工作电流选取,中小容量电动机的辅助电路一般可用截面积为1mm2左右导线,实验中使用实验室提供的导线即可。
3.检查电路接线完成后,仔细检查电路有无漏接、短接、错接以及接线端的接触是否良好。
检查主电路,断开FU,切除控制电路,用万用表欧姆档对各接点做通断检查。
检查控制电路,也是同样断开FU,切断主回路,用万用表欧姆档对各接点做通断检查。
4.通电实验1)电动机正转起动、停止控制:合上电源开关QS,接通电源,按下按钮SB2,观察接触器KM1动作情况以及电动机运行情况,放开按钮SB2,接触器KM1的常开触点闭合,进行“自保”,电动机仍继续运转。
按下停止按钮SB1,接触器KM1失电,电动机停转。
反复操作SB1、SB2,观察电路的工作情况。
切记千万不能同时按下SB2、SB3按钮,否着可能会烧毁电机。
2)电动机反转起动、停止控制:合上电源开关QS,接通电源,按下按钮SB3,观察接触器KM2动作情况以及电动机运行情况,放开按钮SB2,接触器KM2的常开触点闭合,进行“自保”,电动机仍继续运转。
三相鼠笼式异步电动机正反转及能耗制动电气控制系统

三相鼠笼式异步电动机正反转及能耗制动电气控制系统电机拖动课程设计电拖及综合课程设计题目:专业:班级:三相鼠笼式异步电动机正反转及能耗制动电气控制系统电气工程及其自动化电气一班第 1 页共 1 页电机拖动课程设计三相鼠笼式异步电动机正反转及能耗制动电气控制系统[摘要] 本课题主要是关于用西门子的PLC控制机械手来完成一系列预定动作,其中机械手由三相鼠笼式异步电动机来控制,系统的外部信息由五个行程开关及按钮提供,电动机的制动方式为能耗制动。
本设计主要完成如下任务:1.完成三相鼠笼式异步电动机正反转及能耗制动系统主电路设计;2.完成PLC控制系统硬件电路设计;3.设计中用到的所有元器件的选型。
1.系统设计方案:本实验用 Y100L2-4型三相鼠笼式异步电动机驱动机械手来完成如下动作:机械手初始位置时停在左边,位置传感器SQ1 为ON。
当按下起动按钮SB1 后,机械手开始工作,前进到工位1 时工作6s,前进到工位2 时工作6s,然后返回到初始位置。
当按下停止按钮SB2 后,机械手停止工作。
当机械手运动到左(右)极限位置时,报警指示并使机械手停止运动。
机械手的正反转以及停车等由三相鼠笼异步电动机及可编程控制器实现。
左极限位右极限位前进返回位置传感器位置传感器SQ1SQ4暂停6s工位1前进暂停6s 工位2位置传感器SQ2起动按钮SB1停止按钮SB2位置传感器SQ3位置传感器SQ5左极限报警指示右极限报警指示图1:(机械手运动工作示意图)第 2 页共 2 页电机拖动课程设计2.电动机主电路设计:电动机的运动状态分为正转,反转,停止三种,制动形式为能耗制动。
电机选用.Y100L2-4型三相鼠笼式异步电动机.PLC可编程控制器图中QS,FU1,FU2,FR分别为空气开关,熔断器,用于电机的过载,缺相保护等。
电机的正反转互换由改变输入电路的相序来实现。
正转是KM1闭合, KM2断开,反转时KM1断开,KM2闭合,输入电路的相序就由L1-L2-L3变为L3-L2-L1,实现电路的反转。
电动机双重联锁正反转起动能耗制动控制线路识读

电动机双重联锁正反转起动能耗制动控制线路识读第一篇:电动机双重联锁正反转起动能耗制动控制线路识读《电动机双重联锁正反转起动能耗制动控制线路识读》说课稿课题:《电动机双重联锁正反转起动能耗制动控制线路识读》一、本节课的目的:因为本专业毕业生在工厂第一线能从事电气安装、调试、运行、维护、等工作。
所以在工厂中的实际应用最重要。
本节课以引导探索法为主,配合运用多种教学方法(手段),解决学以致用,活学活用的目的。
达到今天的学习,明天的实际应用的目标。
二、作为支撑的课题研究主要内容:美国教育心理学家K.F,朗利教授指出学习中获得了成功的学生不是最聪明的孩子,是那些学习风格碰巧迎合了我们教学方式的学生。
对于学生的差异,本节课运用实物、图片、多媒体课件等增强学生的感性认识。
关注学生的学习倾向差异,顾及到视觉优越、听觉优越和触觉优越风格的学生。
选择合适的课程和多层次的教育内容,选配多样化的教育方法,促使每一位学生在适合的环境中求得最佳发展。
三、教学方法教学设计思路:从应用出发设立情景,通过多媒体教学和现场体验式互动教学,启发式教学。
增强学生对所学情景的体验和认识。
以任务为导向设置识学习读电路图情景。
由于电气识读枯燥、抽象,学生学习时常感到摸不着,理不清学起来索然无味。
为此运用多种教学方法。
首先应用直观教学法在课堂上运用实物、图片演示及多媒体课件等使学生得到课题的情景脉络。
其次运用现场体验式教学,由于枯燥、抽象最好的方法得到感性认识为此每人一套电路控制板实物和一张图纸,采用图物对照,控制逻辑关系能生动鲜明的体现出来,具有说服力。
同时关注学生的学习倾向差异。
教学过程以引导探究法为主传统的教学过程,教学方法上是满堂灌,要讲一个新的知识内容,从概念、定义分析、举例、说明、归纳、总结。
教师先提出问题最终解决问题。
学生是听众,要记结论一方面学生负担重,更重要的是不利于培养学生的创造能力。
引导探究教学和学习,要求学生所学的知识和技能不是简单地从教师那里接受现成的答案,而是教师引导下自主探究,从而获取知识和技能也提高学习能力。
电动机起停及正反转控制装置制作学习指导书

项目一电动机起停及正反转控制装置制作学习指导书一、学习目的1.了解以下国家/行业相关规范与标准◆盘、柜及二次回路结线施工及验收规范GB50171—92◆电气设备安全设计导则GB 4064-83◆国家电气设备安全技术规范GB 19517-2004◆机械安全机械电气设备:通用技术条件GB 5226.1-2002◆用电安全导则GBT 13869-922.熟悉PLC控制系统安装与布线工艺◆按照以上标准与规范进行元件安装与布线3.掌握PLC结构与工作原理,理解循环扫描的工作过程◆S7-200的外部端子及接线方法◆S7-200的内部电路结构框图◆S7-200的输入输出电路工作原理◆S7-200的循环扫描工作过程特点4.学会使用编程软件(Micro/Win)◆操作界面各区域的功能和设置方法◆程序编写及修改的方法和步骤◆上传、下载程序及在线监测的方法5.熟悉基本位逻辑指令的功能与用法◆触点及线圈的概念◆正负跳变指令及取反指令的功能与用法◆置位与复位指令的功能与用法◆堆栈指令的功能与用法6. 能正确编写调试简单逻辑控制程序◆电机起停控制程序◆电机正反转控制程序7.学习规范编写技术文件◆原理图◆布置图◆元件清单◆项目进程表◆程序流程图二、需准备的资料1.Micro/Win软件使用说明书2.S7-200使用手册3.技术文档编写规范三、预习要求1.阅读S7-200使用手册2.阅读Micro/Win软件使用说明书3.阅读技术文档编写规范四、重点或难点1.PLC工作原理2.编程软件使用方法3.基本位逻辑指令的功能、用法4.规范编写技术文件五、学习方法建议1.搜集需准备的资料2.预习基础知识,重点是PLC循环扫描的工作方式、位逻辑指令的功能和用法3.听理论知识讲解时,注意解决预习时遇到的问题4.学习编程软件的使用时,一边看老师演示一边动手实践,加深记忆5.学习基本位逻辑指令时,先重点理解功能和用法,再照搬现成的例子查看运行情况,最后仿照例子编写新的程序并调试。
三相异步电机正反转+能耗制动程序
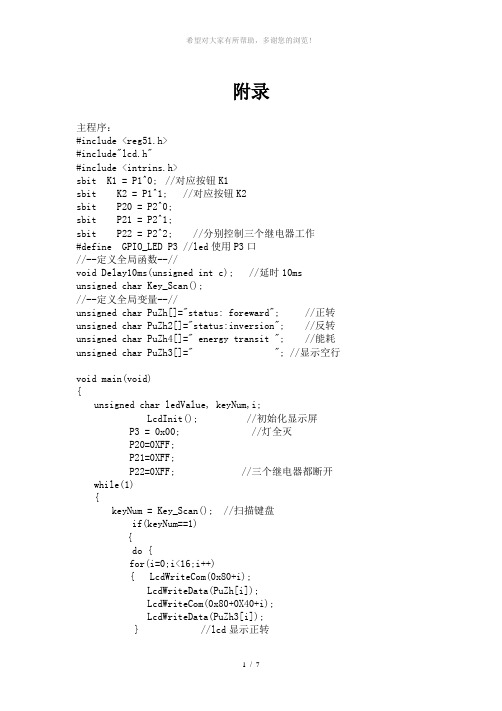
附录主程序:#include <reg51.h>#include"lcd.h"#include <intrins.h>sbit K1 = P1^0; //对应按钮K1sbit K2 = P1^1; //对应按钮K2sbit P20 = P2^0;sbit P21 = P2^1;sbit P22 = P2^2; //分别控制三个继电器工作#define GPIO_LED P3 //led使用P3口//--定义全局函数--//void Delay10ms(unsigned int c); //延时10ms unsigned char Key_Scan();//--定义全局变量--//unsigned char PuZh[]="status: foreward"; //正转unsigned char PuZh2[]="status:inversion"; //反转unsigned char PuZh4[]=" energy transit "; //能耗unsigned char PuZh3[]=" "; //显示空行void main(void){unsigned char ledValue, keyNum,i;LcdInit(); //初始化显示屏P3 = 0x00; //灯全灭P20=0XFF;P21=0XFF;P22=0XFF; //三个继电器都断开while(1){keyNum = Key_Scan(); //扫描键盘if(keyNum==1){do {for(i=0;i<16;i++){ LcdWriteCom(0x80+i);LcdWriteData(PuZh[i]);LcdWriteCom(0x80+0X40+i);LcdWriteData(PuZh3[i]);} //lcd显示正转ledValue = 0x01;GPIO_LED = ledValue;P20=0X00; //继电器吸和打开P21=0XFF;P22=0XFF;Delay10ms(500); //正转10秒keyNum = Key_Scan(); //扫描键盘for(i=0;i<16;i++){ LcdWriteCom(0x80+0X40+i);LcdWriteData(PuZh4[i]);LcdWriteCom(0x80+i);LcdWriteData(PuZh3[i]);} //lcd显示能耗ledValue = 0x02;GPIO_LED = ledValue;P20=0XFF;P21=0X00;P22=0XFF;Delay10ms(50); //能耗1秒keyNum = Key_Scan(); //扫描键盘for(i=0;i<16;i++){ LcdWriteCom(0x80+0X40+i);LcdWriteData(PuZh2[i]);LcdWriteCom(0x80+i);LcdWriteData(PuZh3[i]);} //lcd显示反转ledValue = 0x04;GPIO_LED = ledValue;P20=0XFF;P21=0XFF;P22=0X00;Delay10ms(500); //反转10秒keyNum = Key_Scan(); //扫描键盘for(i=0;i<16;i++){ LcdWriteCom(0x80+0X40+i);LcdWriteData(PuZh4[i]);LcdWriteCom(0x80+i);LcdWriteData(PuZh3[i]);} //lcd显示能耗ledValue = 0x02;GPIO_LED = ledValue;P20=0XFF;P21=0X00;P22=0XFF;Delay10ms(50); //能耗1秒keyNum = Key_Scan(); //扫描键盘} while(keyNum!=2);}P3=0x00;}}unsigned char Key_Scan(){ unsigned char keyValue = 0 , i; //保存键值//--检测按键1--//if (K1==0) //检测按键K1是否按下{Delay10ms(1); //消除抖动if (K1==0) //再次检测按键是否按下{keyValue = 1;i = 0;while ((i<50) && (K1==0)) //检测按键是否松开{Delay10ms(1);i++;}}}//--检测按键2--//if (K2==0) //检测按键K2是否按下{Delay10ms(1); //消除抖动if (K2==0) //再次检测按键是否按下{ keyValue = 2;i = 0;while ((i<50) && (K2==0)) //检测按键是否松开{Delay10ms(1);i++;}}}return keyValue; //将读取到键值的值返回}void Delay10ms(unsigned int c) //延时{unsigned char a, b;for (;c>0;c--){for (b=38;b>0;b--){for (a=130;a>0;a--);}}}LCD1602显示程序:#include"lcd.h"void Lcd1602_Delay1ms(uint c) //延时1秒{uchar a,b;for (; c>0; c--){for (b=199;b>0;b--){for(a=1;a>0;a--);}}}/******************************************************************* ************* 函数名 : LcdWriteCom* 函数功能 : 向LCD写入一个字节的命令* 输入 : com* 输出 : 无******************************************************************** ***********/#ifndef LCD1602_4PINS //当没有定义这个LCD1602_4PINS时void LcdWriteCom(uchar com) //写入命令{LCD1602_E = 0; //使能LCD1602_RS = 0; //选择发送命令LCD1602_RW = 0; //选择写入LCD1602_DATAPINS = com; //放入命令Lcd1602_Delay1ms(1); //延时--等待数据稳定LCD1602_E = 1; //写入时序Lcd1602_Delay1ms(5); //保持时间LCD1602_E = 0;}#elsevoid LcdWriteCom(uchar com) //写入命令{LCD1602_E = 0; //使能清零LCD1602_RS = 0; //选择写入命令LCD1602_RW = 0; //选择写入LCD1602_DATAPINS = com;//由于4位的接线是接到P0口的高四位,所以传送高四位不用改Lcd1602_Delay1ms(1);LCD1602_E = 1; //写入时序Lcd1602_Delay1ms(5);LCD1602_E = 0;Lcd1602_Delay1ms(1);LCD1602_DATAPINS = com << 4; //发送低四位Lcd1602_Delay1ms(1);LCD1602_E = 1; //写入时序Lcd1602_Delay1ms(5);LCD1602_E = 0;}#endif/******************************************************************* ************* 函数名 : LcdWriteData* 函数功能 : 向LCD写入一个字节的数据* 输入 : dat* 输出 : 无******************************************************************** ***********/#ifndef LCD1602_4PINSvoid LcdWriteData(uchar dat) //写入数据{LCD1602_E = 0; //使能清零LCD1602_RS = 1; //选择输入数据LCD1602_RW = 0; //选择写入LCD1602_DATAPINS = dat; //写入数据Lcd1602_Delay1ms(1);LCD1602_E = 1; //写入时序Lcd1602_Delay1ms(5); //保持时间LCD1602_E = 0;}#elsevoid LcdWriteData(uchar dat) //写入数据{LCD1602_E = 0; //使能清零LCD1602_RS = 1; //选择写入数据LCD1602_RW = 0; //选择写入LCD1602_DATAPINS = dat; //由于4位的接线是接到P0口的高四位,所以传送高四位不用改Lcd1602_Delay1ms(1);LCD1602_E = 1; //写入时序Lcd1602_Delay1ms(5);LCD1602_E = 0;LCD1602_DATAPINS = dat << 4; //写入低四位Lcd1602_Delay1ms(1);LCD1602_E = 1; //写入时序Lcd1602_Delay1ms(5);LCD1602_E = 0;}#endif/******************************************************************* ************* 函数名 : LcdInit()* 函数功能 : 初始化LCD屏* 输入 : 无* 输出 : 无******************************************************************** ***********/#ifndef LCD1602_4PINSvoid LcdInit() //LCD初始化子程序{LcdWriteCom(0x38); //开显示LcdWriteCom(0x0c); //开显示不显示光标LcdWriteCom(0x06); //写一个指针加1LcdWriteCom(0x01); //清屏LcdWriteCom(0x80); //设置数据指针起点}#elsevoid LcdInit() //LCD初始化子程序{LcdWriteCom(0x32); //将8位总线转为4位总线LcdWriteCom(0x28); //在四位线下的初始化LcdWriteCom(0x0c); //开显示不显示光标LcdWriteCom(0x06); //写一个指针加1LcdWriteCom(0x01); //清屏LcdWriteCom(0x80); //设置数据指针起点}#endif(注:可编辑下载,若有不当之处,请指正,谢谢!)。
PLC实验3直流电机正反转及能耗制动DOC

3直流电机正反转及能耗制动一、实验目的1.掌握PLC控制的基本原理。
2.掌握直流电机正反转及能耗制动的基本原理及程序设计。
二、实验器材1. ZYE3103B型可编程控制器实验台2. ZYPLC02直流电机正反转及能耗制动演示板3. PC机或FX-20P-E编程器4.编程电缆5.连接导线三、实验原理与实验步骤1.面板上K1、K2、KZ分别表示正转、反转、制动,是PLC给电机的三个控制信号。
KM1、KM2、KM3是模拟实际情况中的接触器,用来控制直流电机的正、反转及制动。
2.控制要求:(1)按下正转按钮K1 , KM1闭合,电机正转;按下制动按钮KZ , KMZ延时1秒动作, 电机能耗制动。
(2)按下反转按钮K2 , KM2闭合,电机反转;按下制动按钮KZ , KMZ延时1秒动作,电机能耗制动。
3.实验步骤:根据具体情况编制输入程序,并检查是否正确。
按接线图连线,实验台与ZYPLC02连接,检查连线是否正确。
按下正转、反转、制动按钮,观察运行结果。
四、设计程序清单1. I/O地址分配清单:输入地址:输出地址: K1 X1 K2 X2 KZ X3KM1 Y1 KM2 Y2 KMZ Y02.程序若干(1) 打开PLC实验台电源,编程器与PLC连接。
(1)梯形图m灿時YDDH 'M-,--------------- --------1 9¥101(11 XIDIDS—Ih YWO T卜(2)指令表m YDDD YDiDi]44^——If——T50< VIOIDOJCSD KID{ END ]0LD XOOl1OE YOOl2AMI X0033AMI YODO4m yoo211OUT Y0025OUT yool12LD X003e LD X00213OE YOOO7OE Y0D214AN]T5D3AMI X00315OUT YOOO9ANI yooo le OUT顶10AM ycoi13ENDKIO3.接线图接线明细表:正转按纽端子K1 ――X1端子,反转按纽端子K2 ――X2端子制动按纽端子KZ ―― X3端子KM1 ——Y1 KM2 ——Y2 KMZ ——Y0+24V——电源部分+24V COM——电源部分COM (注:图中所示的PLC上输入口和输出口的COM端实验台内部已连好。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实训项目名称:电机正反转及能耗制动项目编号:03
一、实验目的:
1、熟悉GX DEVELOPER编程软件、仿真软件;
2、熟悉GT WORK3编程软件、仿真软件
3、用PLC构成电机正反转及能耗制动。
4、通过仿真验证程序的正确性。
二、实验设备、仪器、工具、量具
电脑仿真实训。
应用FX编程软件GX DEVELOPER、FX仿真软件
GX DESIGNER6和触摸屏编程和仿真软件GT WORK3。
三、实验原理或实验要求:
1、用GX DEVELOPER编程软件、GX DESIGNER6仿真软件实现程序的编制,调试,仿真。
从
而验证PLC程序的正确性;
2、用GT WORK3编程软件、仿真软件实现输入、输出设备的仿真,更形象的展示其工作过程。
四、实验内容:
1)按正转按钮,KM1闭合,电机正转。
2)按反转按钮,KM2闭合,电机反转。
3)按停止按钮,KMZ闭合,电机断电,延时10秒,KMZ断开,观察停止时间。
要求用PLC程序实现
五、实验步骤。
1.I/O地址分配
输入:停止----X004; 正转启动按钮----X005; 反转启动按钮----X006; 输出:KM1-------Y1;
KM2-------Y2;KMZ-------Y0;
2.PL C程序见附件1:电机正反转及能耗制动PL C程序。
3.输入PLC程序,进入GX DEVELOPER编程软件、仿真软件界面,具体操作步骤如下:
A 点击工程按钮→创建新工程→选项。
PLC系列:FXCPU;PLC类型:FX2N(C); 程序类型:梯
形图逻辑→确定。
B 输入PLC程序,检查正确无误
C 编译程序
D 仿真.此时LADDER LOGIC TOOL中,RUN框变成黄色,运行状态:RUN。
同时PLC程
序运行。
若点击STOP按钮,则程序停止运行。
4.在界面LADDER LOGIC TOOL中,选择菜单启动→软元件X; 软元件Y;
实训项目名称:电机正反转及能耗制动项目编号:03这两个框中的数值即时软元件X和软元件Y的编号。
双击编号可实施强制接通和断开。
看看梯形图有什么变化。
另外也可选“时序图’→启动→监控停止→此时进入“正在进入监控状态”,双击某个软
元件X,看软元件Y的变化,将“图表表示范围”选X20。
观察输入X输出Y的时序对应关
系。
退出“时序图’和软元件图。
5.建立“电机正反转及能耗制动”组态图。
进入触摸屏GT WORK3的GT DESIGNER3编程软件界面.,具体操作步骤如下:
A 选择“新建”按钮→确定→下一步→机种(G):GT11**-V-C(640X480)
→下一步→制造商(M):三菱电机;机种(E):MELSEC-FX →下一步→下一步→下一
步→下一步→下一步→结束。
B 进入操作界面,编辑”电机正反转及能耗制动”触摸屏组态图,见附件2。
C 编辑完成后,保存。
选好保存路径,工作区名:电机正反转及能耗制动;工程名:111,然后
点保存按钮。
D 退出GT DESIGNER3触摸屏编程软件界面。
6.进入GT SIMULATOR3触摸屏仿真软件界面,具体操作步骤如下:
GOT1000系列(GT11)仿真→启动→工程→打开→工程→找出刚才保存的工程名:111 →确定→点击文件111 →打开。
此时出现“电机正反转及能耗制动“画面。
这时可以仿真演示了
其工作过程:点击”正转”按钮,代表电机正转的Y1灯亮;按“反转”按钮,代表电机反转Y2的灯灭。
点击”停止”按钮,代表电机停止的灯Y0亮10S后断电。
这时你可以把梯形图程序的仿真界面和触摸屏的仿真界面对比看有什么变化。
六、注意事项:
1、触摸屏组态画面仿真实现的前提是,一定要保持PLC程序在仿真状态。
2、退出PLC程序时,别忘了保存该程序。
实训项目名称:电机正反转及能耗制动项目编号:03附件1:电机正反转及能耗制动PLC程序
附件2:电机正反转及能耗制动触摸屏组态图。