机器人制作宝典
手工机器人的制作方法

手工机器人的制作方法今天来聊聊怎么制作手工机器人。
这手工机器人做起来可有意思啦,既能锻炼动手能力,又能发挥咱的创造力。
需要一些硬纸板、剪刀、胶水、彩笔、小电机、电池、电线啥的。
硬纸板可以从快递盒子或者旧包装盒上找,剪刀要那种锋利点的,不然剪起来可费劲了。
胶水嘛,最好是那种粘性强的,能把纸板粘得牢牢的。
小电机可以在网上或者电子市场买到,电池就用普通的五号或者七号电池就行。
材料准备好了,咱就开始动手吧。
第一步,先设计一下你的机器人。
你可以在纸上画个草图,想想你的机器人长啥样,有啥功能。
是高大威猛的,还是小巧可爱的?是会走路的,还是会唱歌的?这全凭你自己的想象。
第二步,根据你的设计,用剪刀把硬纸板剪成各种形状。
比如,身体、脑袋、胳膊、腿啥的。
剪的时候要小心点,别把自己的手给剪了。
如果你的设计比较复杂,可以多剪几个不同形状的纸板,然后再组合起来。
第三步,把剪好的纸板用胶水粘起来。
这一步很关键哦,要粘得牢固一点,不然等会儿机器人散架了可就不好玩了。
可以先从身体部分开始粘,然后再粘脑袋、胳膊和腿。
粘的时候要注意角度和位置,让机器人看起来比较协调。
第四步,给机器人装饰一下。
用彩笔给机器人画上眼睛、嘴巴、衣服啥的,让它看起来更漂亮。
你还可以用一些小贴纸、小珠子啥的来装饰,让机器人更加独特。
第五步,安装电机和电池。
如果你的机器人要会动,那就需要安装一个小电机。
把电机用胶水或者螺丝固定在机器人的身体里,然后用电线把电机和电池连接起来。
注意正负极不要接反了哦,不然电机可不会转。
第六步,测试一下你的机器人。
把电池装上,看看电机能不能正常工作,机器人能不能动起来。
如果有问题,就检查一下线路和电机,看看是不是哪里没接好或者坏了。
如果你的机器人还想有其他功能,比如会唱歌、会发光啥的,你可以再加上一些小喇叭、小灯珠啥的。
不过这就需要你有更多的电子知识和动手能力了。
制作手工机器人是一件很有趣的事情。
你可以根据自己的喜好和创意,做出各种各样的机器人。
乐高机器人简单讲义[宝典]
![乐高机器人简单讲义[宝典]](https://img.taocdn.com/s3/m/4cffab01a31614791711cc7931b765ce05087a85.png)
乐⾼机器⼈简单讲义[宝典]乐⾼机器⼈简单讲义[宝典] 机器⼈组装第⼀步:第⼆步:第三步:第四步:第五步:第六步:第七步:第九步:第⼗步:NXT控制器A B CNXT智能积⽊块有三个输出端⼝,分别为A、B、C,可以连接电机和灯泡。
NXT有四个输⼊端⼝1、2、3、4,连接不同的传感器,通过转换器可连接RCX系列传感器。
1 2 3 4 软件⾯板:菜单栏⼯具栏程序名字2.编程区⾯板3.控制⾯板1.模块⾯板基本⾯版完整⾯板⾃定义⾯板 4.参数设置⾯板常⽤⾯板介绍通过程序下载声⾳⽂可以设置A、B、C三个输出端⼝连接⽅式,电机输出⽅向、能量级别和延续时间等。
件到NXT,并保存在记录A、B、C三个端⼝输出动作、可以设置记录时间,然后通过“播放”功能,将刚才NXT“sound files”⽂件执⾏的动作复制出来。
中,可以选择软件⾃带的⽂件,也可以⾃可以显⽰图像和⽂本,我们可以通过将“数字转换为⽂本”功能,将电机和传感器的数据实时⼰来编写。
显⽰在NXT屏幕上。
有时间和传感器等待,包括触动传感器、声⾳传感器、光电传感器和超声波传感器等待。
分⽀条件有传感器和参数值判断,传感器包括“⽆限循环、时间循环、传感器循环、次数循环和逻辑判断循环”。
分⽀包括“触动、声⾳、光电等”,参数值分⽀包括“数字判断、逻辑判断和⽂本判断”。
完整⾯板介绍包含“常⽤⾯板”⾥所有的功能模块。
输出功能模块,包括单电机、灯泡、发送信息(通过蓝⽛)、声⾳和NXT显⽰器输出模块。
可以设置NXT传感器,RCX传感器、计时器传感器、NXT按钮和接收信息。
包括“等待、循环、分⽀”结构功能模块和停⽌输出模块。
可以定义变量,能进⾏数据运算,包括加、减、乘、除、⼤⼩、范围和逻辑判断。
包括⽂本模块、数字转换⽂本模块、保持激活模块、⽂件存储模块、校准模块、重置电机模块。
⾃定义⾯板:可以⾃⼰设计模块,根据需求可以设机成不同的图标,能进⾏个性化命名将⼀段程序模块化可以把任务分解成若⼲个⼩任务来单独完成,⽅便阅读。
机器人的制作方法

机器人的制作方法要制作一个机器人,首先需要明确机器人的功能和用途。
然后,根据这些需求,选择合适的材料和零部件进行制作。
下面,我将介绍一下制作机器人的基本步骤和方法。
首先,确定机器人的功能和用途。
机器人可以用于各种不同的场合,比如家庭助手、工业生产、科学研究等。
不同的功能和用途需要不同的设计和制作方法,所以首先要确定机器人的具体需求。
其次,选择合适的材料和零部件。
机器人的制作需要用到各种材料和零部件,比如金属、塑料、电子元件等。
根据机器人的功能和用途,选择合适的材料和零部件非常重要,这将直接影响到机器人的性能和稳定性。
然后,进行机器人的结构设计。
机器人的结构设计包括机械结构和电子结构两部分。
机械结构包括机器人的外形和各个零部件之间的连接方式,而电子结构则包括机器人的控制系统和传感器系统等。
结构设计需要考虑到机器人的稳定性、灵活性和可操作性,所以需要进行充分的设计和计划。
接下来,进行机器人的组装和调试。
根据结构设计,将各个零部件组装在一起,并进行调试和测试。
这个过程需要非常仔细和耐心,因为机器人的每个零部件都需要精确的安装和调整,才能确保机器人的正常运行。
最后,进行机器人的程序编写和控制。
根据机器人的功能和用途,编写相应的程序,并将程序加载到机器人的控制系统中。
然后,进行控制系统的调试和测试,确保机器人能够按照预期的方式进行工作。
总之,制作机器人是一个复杂而又有趣的过程。
通过以上的步骤和方法,我们可以按照需求制作出各种不同功能的机器人,这些机器人可以在各个领域发挥重要作用。
希望这些方法对你有所帮助,也期待看到更多有趣的机器人问世。
橡皮泥机器人制作方法

橡皮泥机器人制作方法橡皮泥机器人是一种非常有趣和创造力的手工制作项目。
你可以使用橡皮泥来制作一个可动的机器人,并给它设计出不同动作和特点。
下面是一个简单的橡皮泥机器人制作方法,希望对你有帮助。
材料准备:1. 不同颜色的橡皮泥2. 制作模具(如骨头、眼睛、手臂等)3. 牙签或小棍子4. 线5. 一些小工具(如小刀、小剪刀等)制作步骤:1. 确定机器人的形状和大小,你可以自己设计或者参考一些机器人的图案。
2. 开始制作机器人的身体部分。
将所需颜色的橡皮泥揉成一个球状,并按照机器人的形状,在桌子上轻轻滚动揉成所需形状的身体。
3. 制作机器人的头部。
用同样的方法,将橡皮泥揉成一个稍微大一点的球状,并在底部用手指轻轻按压凹陷处,制作出一个凹陷的地方,作为机器人的面部。
4. 将机器人的头部连接到身体上。
使用牙签或小棍子,在头部的凹陷处插入,然后再插入机器人的身体中。
5. 制作机器人的面部。
你可以使用不同颜色的橡皮泥来制作眼睛、嘴巴和鼻子等部位。
可以使用模具来塑造出比较完美的形状,然后将它们粘附到机器人的头部上。
6. 制作机器人的四肢。
使用橡皮泥揉成四根长条状,作为机器人的手臂和腿部。
可以用小刀或小剪刀修剪橡皮泥,使其更加光滑和匀称。
7. 将机器人的四肢连接到身体上。
使用牙签或小棍子将手臂和腿部插入到机器人身体的相应位置。
8. 设计机器人的特征。
根据你的喜好,可以给机器人添加一些独特的特征,如骨头、翅膀、装饰等。
同样,你可以使用模具或手工塑造来制作这些特征。
9. 为机器人添加细节。
可以使用纹理工具或小工具在机器人的身体和面部添加一些细节,如纹理、花纹等,使其更加逼真或富有个性。
10. 完成机器人的装饰。
根据你的创意和喜好,可以给机器人的身体添加一些装饰,如五颜六色的小球、金属片等,使其更加华丽和吸引人。
总结:橡皮泥机器人的制作可以说是一项非常有趣和创造力的手工制作项目。
通过自己设计和动手操作,你可以制作出一个独特的机器人,并赋予它不同的特征和动作。
简单的机器人制作教程
简单的机器人制作教程这是一个最简单的机器人,一个振动机器人,即以偏心摆锤马达的震动效果作为挪动的动力,算是一种非常简单的BEAM机器人。
整个造型就像一只臭虫,由于振动时接近狂飙一样的不规则运动方式,所以起名为“暴走的臭虫”。
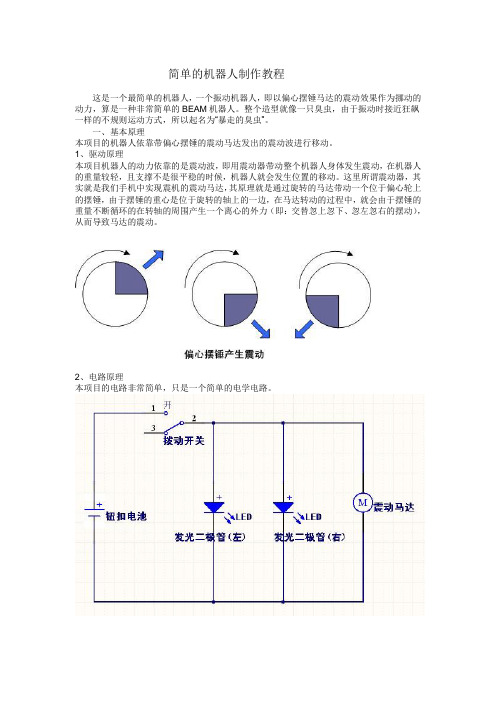
一、基本原理本项目的机器人依靠带偏心摆锤的震动马达发出的震动波进行移动。
1、驱动原理本项目机器人的动力依靠的是震动波,即用震动器带动整个机器人身体发生震动,在机器人的重量较轻,且支撑不是很平稳的时候,机器人就会发生位置的移动。
这里所谓震动器,其实就是我们手机中实现震机的震动马达,其原理就是通过旋转的马达带动一个位于偏心轮上的摆锤,由于摆锤的重心是位于旋转的轴上的一边,在马达转动的过程中,就会由于摆锤的重量不断循环的在转轴的周围产生一个离心的外力(即:交替忽上忽下、忽左忽右的摆动),从而导致马达的震动。
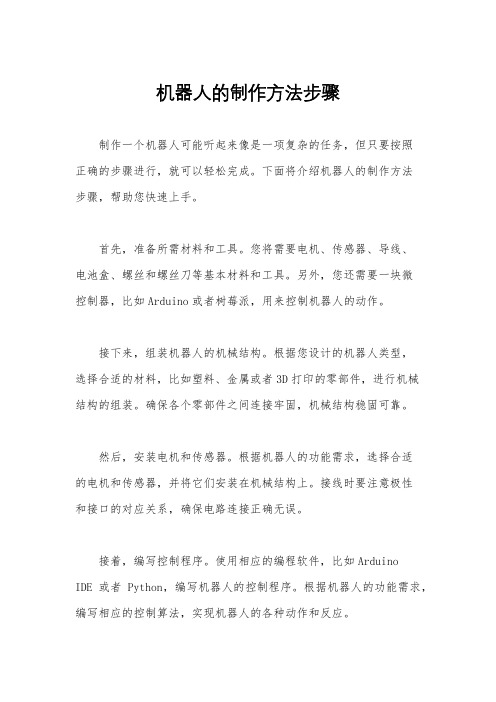
2、电路原理本项目的电路非常简单,只是一个简单的电学电路。
这里我们采用类似电子表所使用的微型钮扣电池作为机器人的能源;采用手机震机用的震动马达作为动力源;采用LED发光二极管作为发光的眼睛;而控制控制机器人启动的开关则是选择一般的小型选择拨动开关。
需要注意的是,一般的选择拨动开关有三个引脚,其中拨动开关可以使中间的引脚(上图之2)有选择的接通两边(上图之1和3)任意一侧的其中一个引脚。
同时,用于做眼睛发光的LED发光二极管的引脚是区分正负极的。
另外提一下,LED发光二极管是有一个启辉电压的,大概是2V多左右,只有供电的电压达到这个值时发光管才会发光。
本项目中,是使用了两只发光二极管作为眼睛的。
机器人开始启动的时候,发光二极管是会发光的,当发现其不亮的时候,就是说明电池的电能已经消耗了不少,电池的电压已经下降到发光二极管无法点亮的程度,这种时候震动马达还是会继续震动的。
因为震动马达启动的电压并不高,在电池的电压已经下降了很多的程度下震动马达还是可以继续工作。
其中注意:1、拨动开关选用1、2两个引脚;2、LED发光二极管的引脚是区分正负极的,要对应连接到电池的正负电极(下面有说明判别的方法);3、钮扣电池的外壳,只有一面金属部分的是负极,整个包住周围以及其中一面的金属部分是正极(见下图所示)。
机器人的制作方法步骤

机器人的制作方法步骤要制作一个机器人,首先需要确定机器人的类型和功能,然后按照以下步骤进行制作:1. 设计机器人结构。
首先,需要根据机器人的功能和用途设计机器人的结构。
确定机器人的外形、大小和材料,以及各个部件的布局和连接方式。
这一步需要考虑机器人的稳定性、灵活性和美观性,确保机器人能够顺利完成预定的任务。
2. 选择电子元件。
根据机器人的功能需求,选择合适的电子元件,如电机、传感器、控制器等。
这些电子元件将用于驱动机器人的运动、感知环境和执行任务。
在选择电子元件时,需要考虑其性能、功耗和兼容性,确保它们能够有效地配合工作。
3. 组装机械结构。
根据设计好的机器人结构,开始组装机械部件。
这包括连接各个部件、安装电子元件、调整机械结构等。
在组装过程中,需要注意各个部件之间的配合和连接方式,确保机器人的运动和功能正常。
4. 连接电子元件。
将选择好的电子元件连接到机器人的控制系统中。
这包括连接电机到电源和控制器、连接传感器到控制器、设置控制器的参数等。
在连接电子元件时,需要仔细检查接线是否正确、电路是否通畅,确保机器人的电子系统正常工作。
5. 编写控制程序。
根据机器人的功能需求,编写控制程序。
这包括编写机器人的运动控制程序、感知环境的程序、执行任务的程序等。
在编写程序时,需要考虑机器人的运动轨迹、感知数据的处理、任务执行的逻辑等,确保程序能够正确地控制机器人的运动和行为。
6. 调试和测试。
完成机器人的组装和程序编写后,进行机器人的调试和测试。
这包括对机器人的各项功能进行测试、对程序进行调试和优化、对机器人的外观和结构进行检查等。
在调试和测试过程中,需要发现并解决各种问题,确保机器人能够正常工作。
7. 完善和改进。
根据调试和测试的结果,对机器人进行完善和改进。
这包括对机器人的结构进行调整、对程序进行优化、对电子元件进行更新等。
在完善和改进过程中,需要不断地优化机器人的性能和功能,确保机器人能够更好地完成任务。
机器人的制作方法步骤
机器人的制作方法步骤
制作一个机器人可能听起来像是一项复杂的任务,但只要按照
正确的步骤进行,就可以轻松完成。
下面将介绍机器人的制作方法
步骤,帮助您快速上手。
首先,准备所需材料和工具。
您将需要电机、传感器、导线、
电池盒、螺丝和螺丝刀等基本材料和工具。
另外,您还需要一块微
控制器,比如Arduino或者树莓派,用来控制机器人的动作。
接下来,组装机器人的机械结构。
根据您设计的机器人类型,
选择合适的材料,比如塑料、金属或者3D打印的零部件,进行机械
结构的组装。
确保各个零部件之间连接牢固,机械结构稳固可靠。
然后,安装电机和传感器。
根据机器人的功能需求,选择合适
的电机和传感器,并将它们安装在机械结构上。
接线时要注意极性
和接口的对应关系,确保电路连接正确无误。
接着,编写控制程序。
使用相应的编程软件,比如Arduino
IDE或者Python,编写机器人的控制程序。
根据机器人的功能需求,编写相应的控制算法,实现机器人的各种动作和反应。
最后,测试和调试机器人。
将电池安装到电池盒中,给机器人供电,测试机器人的各项功能和性能。
如果发现问题,及时调试和修复,直到机器人能够正常运行为止。
通过以上步骤,您就可以成功制作一个机器人了。
当然,机器人的制作还有许多细节和技巧需要不断摸索和学习,希望这些基本步骤能够帮助您顺利完成机器人的制作。
祝您好运!。
仿生机器人制作入门 书籍

仿生机器人制作入门书籍
1. 《从 0 到 1 学做仿生机器人》
例子:嘿,你想过自己也能做出超级酷的仿生机器人吗?就像自己创造了一个新的小伙伴一样神奇!
2. 《轻松上手仿生机器人制作》
例子:哇哦,制作仿生机器人真的没有那么难,只要跟着这本书一步步来,你也能行呀,别不信!
3. 《仿生机器人制作秘籍》
例子:你知道吗,这可不仅仅是一本普通的书,它简直就是打开仿生机器人世界大门的钥匙!
4. 《小白也能懂的仿生机器人制作指南》
例子:哎呀呀,就算你是个啥都不懂的小白,看了这本书也能变成高手,这可不是吹的哟!
5. 《带你走进仿生机器人制作的奇妙世界》
例子:嘿,朋友,快来跟着这本书一起走进那个奇妙无比的仿生机器人世界吧,保证让你惊叹不已!
6. 《一学就会的仿生机器人制作宝典》
例子:咋样,是不是很想拥有这本宝典呀,有了它,你就能像超人一样制作出厉害的仿生机器人啦!
7. 《仿生机器人制作启蒙之书》
例子:这不就是那本可以让你开启仿生机器人制作之旅的启蒙之书吗?还等啥呢!
8. 《开启仿生机器人制作大门的钥匙在这里!》
例子:难道你不想找到那把开启仿生机器人制作大门的钥匙吗?这本书就是啦!
9. 《仿生机器人制作,从这里开始》
例子:你准备好从这里开始你的仿生机器人制作征程了吗?绝对会超级精彩的呀!
我的观点结论:这些关于仿生机器人制作入门的书籍真的很棒,能够帮助大家轻松踏入这个有趣又充满挑战的领域,只要用心去学去做,一定会有满满的收获!。
机器人的制作方法和过程
机器人的制作方法和过程嘿,你有没有想过自己动手做一个机器人呀?那可真是超级酷的一件事呢!今天我就来和你唠唠机器人的制作方法和过程。
我有个朋友叫小李,他就是个机器人制作的狂热爱好者。
有一次我去他家玩,一进门就被他那满桌子的零件给惊到了。
他眼睛放光地跟我说:“今天我要给你展示下我做机器人的厉害!”我当时就想,这能行么?就像看着一堆杂乱无章的拼图碎片,能拼出个什么来呢?制作机器人的第一步,那就是要有个好的设计思路。
这就好比盖房子之前得有个蓝图一样重要。
小李告诉我,他在设计这个机器人的时候,脑海里就像在放电影。
他想让这个机器人能在家里帮忙干点简单的活儿,像拿个东西,打扫下小角落啥的。
他说:“你想啊,如果有个小机器人像个小管家一样,那多棒啊!”我当时就觉得他的想法真不错,就像在黑暗中点亮了一盏灯。
有了设计思路后,就得开始收集零件了。
这可不是件轻松的事儿。
就像你去森林里找不同种类的树叶来做一幅独特的画一样。
小李的房间里有各种各样的零件盒,那些小螺丝、小铁片、还有电路板啥的,看得我眼花缭乱。
他说有些零件是他从旧的电子设备里拆出来的,这就像是从废旧的城堡里挖掘宝藏一样。
有些则是他专门去电子市场淘来的。
他在市场里就像个寻宝猎人,眼睛得特别尖,在一堆东西里找到自己想要的。
接下来就是组装啦。
这可真是个精细活儿,就像绣花一样。
小李先拿起了机器人的骨架部分,那是一个用轻质金属做的框架。
他小心翼翼地把螺丝拧进去,嘴里还嘟囔着:“这可不能松了,不然机器人就散架了,那可就成了个破铜烂铁喽。
”我在旁边看着都有点紧张,感觉每一个动作都像是在进行一场精密的手术。
在组装的过程中,电路连接是关键。
那些密密麻麻的线路就像迷宫一样。
小李拿着电烙铁,就像一个拿着魔法棒的魔法师。
他说:“这线路要是接错了,机器人可就像个迷路的孩子,不知道该干啥了。
”他仔细地对照着电路图,把每一根线都连接到正确的位置。
有时候他会皱起眉头,那是遇到难题了。
有时候又会突然笑起来,肯定是解决了一个大麻烦。
机器人的制作方法步骤
机器人的制作方法步骤机器人的制作方法可以分为以下几个步骤,通过这些步骤,你可以制作出一个简单的机器人模型,让它动起来。
第一步,确定机器人的功能和设计。
在制作机器人之前,首先要确定机器人的功能和设计。
你可以考虑机器人的用途,比如是用来做家务助手,还是用来进行娱乐互动等。
同时,你还需要设计机器人的外形,包括大小、形状、颜色等方面的设计。
第二步,选择合适的材料和零部件。
根据机器人的功能和设计,选择合适的材料和零部件。
比如,如果你要制作一个可以移动的机器人,你就需要选择轮子、电机等零部件。
此外,你还需要选择适合的外壳材料,比如塑料、金属等。
第三步,组装机器人的框架。
根据设计图纸,组装机器人的框架。
这包括安装电机、传感器等零部件,同时搭建机器人的外形。
在这一步,需要确保零部件的安装位置和连接方式是准确的,这对机器人后续的功能实现至关重要。
第四步,安装控制系统。
安装机器人的控制系统,这包括主控板、传感器、电路等。
控制系统是机器人的大脑,它可以接收指令,控制机器人的动作和行为。
在这一步,需要确保控制系统的连接正确,同时进行简单的程序编写。
第五步,调试和测试。
完成机器人的组装后,进行调试和测试。
这包括检查各个零部件的工作状态,测试机器人的基本功能,比如移动、感应等。
如果发现问题,及时进行调整和修正,确保机器人的正常运行。
第六步,优化和改进。
根据测试结果,对机器人进行优化和改进。
比如增加新的功能模块,改进机器人的外形设计,提高机器人的性能等。
通过不断的优化和改进,使机器人更加完善。
通过以上步骤,你可以制作出一个简单的机器人模型。
当然,如果你想制作更复杂的机器人,还需要更多的知识和技能。
希望这些步骤对你有所帮助,祝你制作机器人顺利!。
机器人制作方法
机器人制作方法
机器人制作方法
机器人制作是一项复杂的任务,需要综合运用机械、电气、计算机等多学科知识,因而并不是每个人都能成功制作出机器人,但只要努力学习、仔细实践,一定可以成功制作出机器人,下面就介绍几个机器人制作的步骤:
一、设计机器人
1.确定需要构建的机器人外形。
2.制定机器人的使用目的,确定机器人的功能需求。
3.根据需求确定机器人各部件的规格,如电机转速、传动比例、接口等,并确定机器人的电路设计方案。
4.绘制机器人的全貌图,进行细节设计,把握机器人的几何尺寸。
二、准备材料
1.准备机器人需要的部件,如电机、传感器、传动装置等。
2.准备金属制件,如螺丝、螺栓、轴承等。
3.准备电子元件,如电源模块、控制板、接口板等。
三、组装机器人
1.按图纸把机器人各部分加工成型,进行组装安装。
2.使用金属制件进行机器人机械构件的连接。
3.将电子元件安装好,通过接口对机器人进行控制。
4.安装机器人的电源,测试检查机器人的动作是否正常,调整做到机器人各部分之间的良好协调。
四、编程编写
1.用计算机语言完成机器人控制程序的编写,完善机器人的功能。
2.完善机器人各个细节,如变量的设置,计算过程等。
3.测试、调试,保证机器人程序的稳定运行。
通过以上几个步骤,就可以制作出一个功能良好的机器人了,至此,一台完整的机器人就做好了。
简单机器人制作方法
简单机器人制作方法机器人是一种能够执行特定任务的自动化设备。
制作一个简单的机器人可以分为几个步骤。
首先,需要确定机器人的功能和设计。
然后,选择适当的材料和零件来构建机器人。
最后,编写程序使机器人能够执行所需的任务。
下面是详细的制作步骤:第一步:确定机器人的功能和设计在开始制作机器人之前,需要明确机器人的功能和设计。
例如,你想制作一个能够移动的机器人,还是一个能够执行特定任务的机器人?机器人的设计可能会影响到材料的选择和构建过程。
第二步:选择适当的材料和零件根据机器人的设计,选择适当的材料和零部件来构建机器人。
常用的材料包括金属、塑料和木材等。
零部件可能包括电机、传感器、线缆和螺栓等。
选择材料和零部件时,要考虑到它们的可靠性、耐用性和可用性等因素。
第三步:组装机器人的身体根据机器人的设计和选择的材料,开始组装机器人的身体。
首先,制作机器人的框架,可以使用金属管或树脂板等材料来做。
然后,根据需要,安装电机和轮子等驱动部件。
最后,安装传感器和其他附件以完成机器人的身体组装。
第四步:连接电路和传感器在机器人的身体组装完成后,需要连接电路和传感器,使其能够接收和处理信息。
首先,连接电机和电源,确保它们能正常工作。
然后,根据需要,连接传感器,如红外线传感器、温度传感器或触摸传感器等。
确保传感器能够与控制系统进行有效的通信。
第五步:编写控制程序编写控制程序是使机器人能够执行所需任务的关键步骤。
根据机器人的功能和设计,选择合适的编程语言,如C++或Python等。
首先,编写代码以控制机器人的基本动作,如前进、后退或转向等。
然后,根据需要,编写代码以实现其他功能,如避障、跟随线路或抓取物体等。
第六步:测试和调试在机器人完成组装和程序编写后,需要进行测试和调试。
首先,测试机器人的基本动作,确保它能够按预期移动。
然后,测试其他功能和传感器,确保它们能够正常工作。
如果发现问题,需要检查代码和电路连接,进行调试和修复。
总结:制作一个简单的机器人需要明确机器人的功能和设计,并选择适当的材料和零部件。
机器人的制作方法步骤

机器人的制作方法步骤制作机器人是一项既有趣又具有挑战性的活动,它涉及到机械、电子、编程等多个领域的知识。
下面将介绍一种简单的机器人制作方法,希望能够帮助大家快速入门。
材料准备。
首先,我们需要准备一些基本的材料,包括电机、轮子、螺丝、螺母、导线、电池盒、开关、遥控器等。
这些材料可以在电子市场或者网络上购买到,价格也比较实惠。
机械结构搭建。
接下来,我们开始搭建机器人的机械结构。
首先,将两个电机固定在底盘上,然后安装轮子到电机轴上。
接着,将电池盒和开关安装在机器人的合适位置上,确保电路连接正确,避免出现短路或者其他问题。
电路连接。
完成机械结构后,我们需要进行电路连接。
首先,将电机与电池盒通过导线连接起来,然后接入开关和遥控器。
在连接电路的过程中,一定要注意极性的正确性,避免损坏电子元件。
程序编写。
接下来,我们需要编写机器人的控制程序。
可以使用Arduino、树莓派等开发板,通过简单的编程语言来控制机器人的运动。
编写程序时,需要考虑机器人的运动逻辑、遥控器的信号解析等问题,确保程序的稳定性和可靠性。
调试测试。
完成程序编写后,我们需要对机器人进行调试测试。
首先,确认电路连接正确,然后通过遥控器来控制机器人的运动,观察是否符合预期。
在调试测试过程中,可能会出现一些问题,需要及时排查并解决。
优化改进。
最后,根据调试测试的结果,对机器人进行优化改进。
可以调整电机的转速、增加传感器模块、改进程序算法等,提高机器人的性能和稳定性。
优化改进是一个不断迭代的过程,需要耐心和细心。
总结。
通过以上步骤,我们就可以制作出一个简单的机器人。
当然,机器人制作的过程中还有很多细节和技巧,需要我们不断学习和积累经验。
希望大家可以通过制作机器人,对机械、电子、编程等知识有更深入的了解,同时也能够培养动手能力和创造力。
祝大家制作机器人顺利,玩得开心!。
格斗机器人制作方法
格斗机器人制作方法
嘿,朋友们!今天我就来给你们讲讲超酷的格斗机器人制作方法!
首先,咱得找些厉害的材料啊,就像蝙蝠侠得有他的高科技装备一样!你想想,要是没有坚固的外壳,那机器人不就一下被打垮啦?比如找些结实的金属板,这就是机器人的“铠甲”呀!
然后呢,得有强大的动力来源。
这就好比汽车得有个好引擎,咱的格斗机器人也得有能让它活力四射的动力装置哦!电池或者小电机啥的可不能少。
接下来就是关键啦,设计机器人的“身体结构”。
这可不能马虎,你得让它能灵活运动,就像体操运动员一样矫健,对吧?给它装上灵活的关节,能让它做出各种厉害的动作。
再说说控制系统吧。
这就好像是机器人的“大脑”呀!你得能精确地指挥它,让它按照你的想法去行动。
就好比你控制遥控汽车一样,但可比那复杂多啦!
嘿,你说这像不像在创造一个迷你超级英雄?也许你的格斗机器人就能在赛场上大杀四方啦!
咱可以和伙伴们一起头脑风暴,讨论怎么让机器人更厉害。
“嘿,咱给它装个这个怎么样?”“哇,那肯定酷毙啦!”这种一起奋斗的感觉真的太棒啦!
总之,制作格斗机器人可太有意思啦!你能把你的想法统统实现,看着它一点点成型,变得超级厉害,那成就感简直爆棚!还等什么呢?赶快动手去创造属于你自己的格斗机器人吧!别犹豫啦!。
科技小发明制作简易机器人手臂

科技小发明制作简易机器人手臂在科技的世界里,机器人手臂一直是令人着迷的存在。
它们在工业生产、医疗领域、科学研究等众多方面发挥着重要作用。
但你是否想过,自己也能动手制作一个简易的机器人手臂呢?接下来,就让我带你一起探索这个有趣的制作过程。
要制作一个简易机器人手臂,我们首先需要明确它的基本构成和工作原理。
一般来说,一个机器人手臂由多个关节、驱动装置、控制系统和执行器组成。
关节用于实现手臂的各种动作,驱动装置提供动力,控制系统指挥动作的执行,而执行器则将动力转化为实际的动作。
在材料准备方面,我们需要以下这些东西:一些硬纸板或塑料板用于制作手臂的结构,小型直流电机作为驱动装置,电池为电机供电,电线用于连接电路,螺丝和螺母用于固定各个部件,以及一些简单的电子元件如开关、电阻等。
此外,还需要一些工具,如剪刀、胶水、螺丝刀、电钻等。
接下来就是制作的具体步骤。
第一步,设计手臂的结构。
根据自己的想法和需求,在纸上画出机器人手臂的大致形状和尺寸,包括手臂的长度、关节的位置和角度等。
然后,将硬纸板或塑料板按照设计图纸裁剪成相应的形状。
第二步,组装关节。
使用螺丝和螺母将各个部件连接起来,形成关节。
关节的灵活性是关键,要确保它们能够顺畅地转动。
第三步,安装驱动装置。
将小型直流电机固定在合适的位置,并通过齿轮、皮带等传动装置与关节相连,以实现电机带动关节转动。
第四步,连接电路。
将电池、开关、电机和电子元件通过电线连接起来,形成一个完整的电路。
注意要正确连接正负极,避免短路。
第五步,调试和优化。
在完成初步组装后,接通电源,测试机器人手臂的动作是否符合预期。
如果有卡顿或不灵活的地方,需要对关节进行调整,或者检查电路是否存在问题。
在制作过程中,还需要注意一些细节。
比如,各个部件的尺寸要精确,否则会影响手臂的整体性能;电路连接要牢固,避免接触不良;驱动装置的选择要根据手臂的负载和动作要求来确定,不能过大或过小。
当我们的简易机器人手臂制作完成后,可以通过编程或者手动控制来实现各种有趣的动作。
【下载】小型智能机器人制作全攻略4版
【下载】小型智能机器人制作全攻略4版第一部分机器人制作中的科学与技术 1第1章欢迎来到机器人的精彩世界 21.1 制作机器人的乐趣 21.2 为什么制作机器人 31.2.1 机器人技术是现代科技的基石 31.2.2 机器人技术可以作为职业生涯的一块敲门砖 4 1.2.3 机器人救援技术 41.2.4 最重要的一点,机器人实在是太好玩了 41.3 模块化制作方式 41.4 成本更低,机器人更好 51.5 需要掌握的技术 51.5.1 电子学背景 61.5.2 编程经验 71.5.3 机械经验 71.5.4 手工技能 71.5.5 两个非常重要的技能 71.6 自制、套件或者成品 81.6.1 自己制作 81.6.2 成品机器人 81.6.3 套件或零件 81.6.3.1 VE×机器人设计系统 91.6.3.2 Lynxmotion舵机制作套件 91.6.3.3 Bioloid机器人套件 91.6.3.4 Pitsco/FIRST机器人FTC套件 91.6.4 与你的技能相称的项目 101.7 像机器人设计师那样思考 10第2章机器人的构造 112.1 固定与移动式机器人 112.2 自动与遥控式机器人 122.3 人工与自主机器人 132.4 那么,机器人到底是什么 132.5 机器人的身体 142.5.1 机器人的尺寸、形状和样式 14 2.5.1.1 乌龟或桌面机器人 142.5.1.2 小车机器人 152.5.1.3 步行机器人 152.5.1.4 手臂和夹持器 162.5.1.5 机器人和类人型机器人 162.5.2 骨骼结构 172.5.3 骨头和肉——木头、塑料或金属 18 2.6 运动系统 192.6.1 车轮 192.6.2 履带 202.6.3 腿 202.7 动力系统 212.7.1 电池的种类 212.7.2 其他动力来源 212.8 传感器 212.8.1 触觉 222.8.2 光线和声音 222.8.3 嗅觉和味觉 232.8.4 遥感 232.8.5 倾斜、运动、定位 232.9 输出设备 232.10 “机器人”名称的由来 24第3章准备材料 253.1 电子配套材料商店 253.2 在线电子经销商 263.3 使用查找元件 26 3.4 专业在线机器人零售商 273.5 业余爱好和模型商店 273.6 工艺用品商店 273.7 五金和家装材料商店 283.8 电子制造商的样品 283.9 上网查找你需要的材料 293.10 有计划的一次性采购 293.11 令人难忘的剩余物资商店 30 3.12 从专业商店购买材料 303.13 回收:利用现有资源 313.14 做事情有条理 323.14.1 小材料的收纳柜 323.14.2 大型储存柜 333.14.3 工具箱和背包 333.14.4 保管好你的存货清单 333.14.5 特别的储存方案 34第二部分制作机器人 35第4章安全第一(永远放在首位) 36 4.1 操作安全 364.2 电池安全 374.3 焊接安全 374.4 防火安全 374.5 防止静电损害 384.5.1 静电放电的问题 384.5.2 使用防静电腕带 384.5.3 保存静电敏感元件 394.5.3.1 合适的服装可以减小静电 39 4.5.3.2 使用接地的焊接工具 404.6 用电安全 404.7 急救 404.7.1 眼睛伤害的急救 404.7.2 电击伤害的急救 414.8 利用常识,并享受你的爱好 41第5章制作机器人的身体——基本知识 42 5.1 选择合适的制作材料 425.1.1 木头 435.1.2 塑料 435.1.3 金属 445.1.4 轻质复合材料 455.2 评论:选择正确的材料 455.3 用“身边”的材料制作机器人 465.4 制作机器人的基本工具 465.4.1 卷尺 465.4.2 螺丝刀 475.4.3 锤子 475.4.4 钳子 475.4.5 钢锯 475.4.6 电钻 485.4.7 钻头 485.4.8 螺丝批头 495.4.9 雕刻刀 495.4.10 套筒螺丝刀 495.5 可选工具 495.6 五金用品 505.6.1 螺丝和螺母 505.6.2 垫片 505.6.3 支架 505.7准备一个工作室 51第6章机械加工技术 526.1 重中之重:眼镜与耳朵的保护 52 6.2 计划、起草、测量、标记 52 6.3 材料的钻孔 536.3.1 选择正确的钻头 536.3.2 选择合适的速度 546.3.3 保养好钻头的卡盘 546.3.4 控制钻孔的深度 556.3.5 钻孔的垂直校正 566.3.6 使用夹具和台钳 566.3.7 钻孔窍门 566.4 材料的切割 576.4.1 注意安全 576.4.2 使用锯的窍门 586.4.3 限制切割深度 586.4.4 其他金属切割方法 596.5 使用手持电动工具 596.5.1 工具的安全 596.5.2 工具的保养 606.5.3 使用常识 606.6 使用气动工具提高工作效率 60 第7章木头的加工 617.1 硬木和软木的区别 617.2 木板与胶合板 617.2.1 使用胶合板 627.2.2 使用木板 637.2.3 常见木板规格 637.2.4 中密度纤维板 637.3 木工技巧 647.3.1 切割一个底盘 647.3.1.1 多边形底盘的加工 647.3.1.2 去除更多的角 657.3.1.3 制作轮框 667.3.2 框架的切割 677.3.2.1 正确的测量 687.3.2.2 组装框架 687.3.3 木头的钻孔 697.3.3.1 使用垫板 697.3.3.2 调节钻孔的速度 697.3.4 木头的打磨 707.3.4.1 粗磨和休整 707.3.4.2 砂纸 707.3.4.3 油漆 70第8章制作木制结构的移动平台 71 8.1 制作底盘 718.1.0 切割和钻孔 728.2 安装电动机 738.3 安装车轮 748.4 安装球形万向轮 758.5 PlyBot的使用 758.6 其他方式 76第9章塑料的加工 779.1 常见塑料的种类 779.2 最适合用于机器人的塑料 78 9.3 哪里去买塑料 799.4 硬质发泡PVC的特性 799.4.1 发泡PVC的优点 799.4.2 选择板材的厚度 809.5 怎么切割塑料 809.5.1 裁切技巧 819.5.2 用锯切割 819.6 怎么给塑料钻孔 829.6.1 先定位再扩孔 829.6.2 电动工具的转速 829.7 制作塑料底盘 829.7.1 参考木制底盘的设计 839.7.2 直线切割制作底盘 839.8 制作塑料框架 849.9 如何使塑料弯曲定型 859.10 如何将塑料的边沿打磨光滑 85 9.11 如何黏合塑料 859.11.1 使用液状黏合剂 869.11.2 使用家用黏合剂 869.12 使用热胶枪加工塑料 879.13 如何给塑料上漆 879.14 家用塑料制品制作机器人 87第10章制作塑料结构的移动平台 89 10.1 制作底盘 8910.2 安装电动机 9110.3 安装车轮 9210.4 安装球形万向轮 9210.5 使用PlastoBot 9210.6 更改PlastoBot的设计 93第11章金属的加工 9511.1 适合制作机器人的金属种类 95 11.1.1 铝 9511.1.2 钢 9511.1.3 铜 9611.1.4 锌和锡 9611.2 测量金属的厚度 9611.3 什么是热处理 9711.4 哪里去买金属材料 9811.5 机器人常用金属 9811.6 家装商店里的金属材料 9911.6.1 铝型材 9911.6.2 加强板 9911.6.3 钢管和角铁 10011.6.4 EMT管子 10011.7 工艺和业余爱好商店里的金属材料 101 11.8 金属加工技术 10111.8.1 切割底盘 10211.8.2 切割厚金属板 10311.8.3 切割薄金属板 10311.8.4 切割框架 10311.8.4.1 使用短锯和斜锯架 10411.8.4.2 制作箱式框架 10411.8.5 给金属钻孔 10411.8.5.1 冲定位坑 10511.8.5.2 使用钻孔油 10511.8.5.3 使用钻床 10511.8.5.4 给金属攻丝 10511.8.6 弯曲金属 10611.8.7 修整金属 10711.8.7.1 使用金属锉 10711.8.7.2 使用砂纸 10711.8.7.3 金属上漆 108第12章制作金属结构的移动平台 109 12.1 制作底盘 10912.1.1 准备材料 11012.1.2 钻孔 11112.1.3 组装条带和钉接板 11212.1.4 安装舵机支架 11212.1.5 安装万向轮 11312.1.6 安装舵机和车轮 11312.2 使用TinBot 114第13章装配技术 11513.1 螺丝、螺母和其他紧固件 115 13.1.1 紧固件的尺寸 11613.1.1.1 英制 11613.1.1.2 公制 11613.1.2 木螺丝和金属自攻螺丝 116 13.1.3 螺丝头部的样式 11713.1.4 螺丝刀的样式 11713.1.5 螺母 11813.1.6 垫片和它们的用法 118 13.1.7 紧固件的材料 11913.1.8 紧固件的购买 11913.1.9 攻出螺纹 12013.2 支架 12013.2.1 镀锌钢板支架 12013.2.2 塑料支架 12113.3 黏合剂的选择和使用 121 13.3.1 接合与定型 12213.3.2 家用胶水 12213.3.2.1 PVAc(聚醋酸乙烯) 122 13.3.2.2 硅酮 12213.3.2.3 接触黏合剂 12213.3.2.4 液状黏合剂 12313.3.3 使用家用胶水 12313.3.4 双份环氧树脂黏合剂 123 13.3.4.1 环氧树脂特别在哪里 12313.3.4.2 使用双份环氧树脂 12413.3.5 你、机器人和超级胶水 12413.3.6 使用热熔胶 12513.3.7 用夹具或胶带固定好接合部位 125 13.3.8 接合加固的方法 12613.3.9 总结:选择合适的胶水 127第14章快速成型法 12814.1 选择轻量机器人材料 12814.1.1 加厚硬纸板,就是它 12814.1.2 空心塑料板 12914.1.3 泡沫塑料板 12914.1.4 建筑泡沫 12914.1.5 相框牛皮纸板 13014.2 基底板的切割和钻孔 13014.2.1 使用小刀进行切割 13114.2.2 使用纸板切割器 13114.3 使用临时紧固件辅助快速成型 131 14.3.1 搭扣紧固件 13214.3.2 塑料扎带 13314.3.3 胶带 13314.3.4 双面胶带 13314.3.5 电缆夹具 13414.3.6 可用于快速成型的各种黏合剂 134第15章用计算机辅助设计机器人的草图 135 15.1 规划钻孔和切割的布局 13515.1.1 手工设计布局 13515.1.1.1 直接绘制 13515.1.1.2 使用纸模板 13615.1.1.3 制作多个零件 13615.1.1.4 使用复写纸和划线器 13615.1.2 用计算机图形程序设计布局 137 15.1.2.1 矢量图是最佳的选择 137 15.1.2.2 使用Inkscape设计机器人 137 15.1.3 用低成本CAD程序设计布局 138 15.1.3.1 CAD的优点 13915.1.3.2 基本CAD功能 14015.2 矢量图形的格式 14015.3 使用激光切割服务 14115.4 金属与塑料零件的快速成型 142 第16章用玩具制作高科技机器人 143 16.1 Erector制作套件 14316.2 慧鱼(Fischertec—hnik) 144 16.3 K'NEx 14416.4 其他值得一试的制作套件 145 16.4.1 Inventa 14516.4.2 Zoob 14516.4.3 Zometool 14516.4.4 值得纪念的制作玩具 14516.5 元件拼插式制作 14616.5.1 建立永久性的连接 14616.5.2 用拼接零件组装模块 14716.6 改装机器人的特制玩具 14716.6.1 田宫 14716.6.2 OWIKIT和MOVITS 14816.7 把玩具车改装成机器人 14816.7.1 机动车辆 14916.7.2 使用车辆里面的零件 15016.7.3 零件的重新组装 150第17章用身边的材料制作机器人 152 17.1 几个寻找可用材料的思路 15217.2 尝试“免切割”金属底盘的设计 153 17.2.1 迷你T—BOT简介 15317.2.2 制作迷你T—BOT 15417.2.3 使用大号T型铁制作大机器人 155 17.2.4 木头加强用的金属片 15517.2.4.0 更多思路 15617.3 使用木头和塑料样品 15717.4 注意观察多动脑 157第三部分动力、电动机和运动 159第18章电池大全 16018.1 动力概述 16018.2 适用于机器人的电池 16118.2.1 碳—锌电池 16118.2.2 碱性电池 16118.2.3 可充电碱性电池 16118.2.4 镍—镉电池 16118.2.5 镍金属氢化物电池 16218.2.6 锂离子电池 16218.2.7 密封式铅—酸电池(SLA) 162 18.2.8 应该选择哪种电池 16318.3 了解电池的参数 16318.3.1电压 16318.3.1.1 名义上的(“标称”)电压 163 18.3.1.2 电压下降的问题 16418.3.2 容量 16518.3.2.1 用安时表示容量 16518.3.2.2 预留出一定容量 16518.3.2.3 过放电的危害 16518.3.2.4 小电池的容量 16618.3.3 了解电池的内阻 16618.3.4 了解电池的充电参数 16718.4 给电池充电 16718.5 机器人电池一览 16718.6 常见的电池尺寸 16718.7 增加电池的额定值 169第19章机器人的动力系统 17019.1 电源和电池的电路符号 17019.2 使用预制电池组 17119.2.1 使用模型预制的电池组 17119.2.2 镍镉或镍氢电池 17119.3 制作你自己的可充电电池组 17219.4 使用电池和电池仓 17319.4.1 将电池仓安装在机器人上 17319.4.2 9V电池卡扣和电池卡子 17419.4.3 用电池仓实现“中间”电压 17419.5 最好的电池布局 17519.6 电池和机器人的连接 17519.7 预防电池反接 17619.7.1 结构互锁式连接 17619.7.2 电路反接保护 17719.8 在线资源:如何给电池仓或插墙式稳压电源焊接桶形插头17719.9 加入熔丝保护 17719.10 提供多组电压 17819.10.1 单电池、单电压 17819.10.2 单电池、多组电压 17919.10.3 多组电池、多组电压 17919.10.4 多组电池、分组电压 17919.11 调整电压数值 18019.11.1 使用硅二极管降压 18019.11.2 稳压二极管的电压调整 181 19.11.3 线性稳压器 18219.11.4 开关式稳压电源 18319.11.5 使用多组电压调整 18419.12 处理电力不足的问题 18519.13 电池电压监视器 185第20章让机器人动起来 18620.1 选择一种运动系统 18620.2 轮式运动 18720.2.1 差速运动 18720.2.2 车式转向 18820.2.3 三轮车式转向 18920.2.4 全方位转向 18920.2.4.1 全方位转向是如何实现的 190 20.2.4.2 其他结构的全方位转向 191 20.3 履带式运动 19120.4 腿式运动 19220.5 其他运动方式 19320.6 在线资源:控制机器人的重量 194 第21章选择正确的电动机 19521.1 交流电动机还是直流电动机 195 21.2 连续旋转还是步进电动机 196 21.3 舵机 19621.4 电动机参数 19721.4.1 工作电压 19721.4.2 电流消耗 19721.4.3 转速 19821.4.4 转矩 19821.4.5 失速或额定转矩 19921.4.6 判断电动机的转矩 19921.5 测量电动机的电流消耗 20021.5.1 直接测量电动机电流 20021.5.2 间接测量电动机的电流 20221.6 处理电压下降的问题 20221.7 消除电噪声 203第22章使用直流电动机 20522.1 直流电动机的原理 20522.1.1 永磁直流电动机:经济实惠,使用方便 205 22.1.2 转向可逆 20622.2 评论直流电动机的参数 20722.3 控制直流电动机 20722.4 用开关控制电动机 20722.4.1 用开关实现简单的开/关控制 20822.4.2 用开关控制转向 20822.5 用继电器控制电动机22.5.1 继电器的内部结构 20922.5.2 简单的继电器开关控制 21022.5.3 用继电器控制方向 21022.5.4 创建一个继电器半桥 21122.5.5 继电器的额定电流 21222.5.6 简易继电器驱动电路 21222.6 用双极型晶体管控制电动机 21322.6.1 基本的晶体管电动机控制 21422.6.2 双向晶体管控制 21522.7 用功率场效应晶体管控制电动机 21522.7.1 基本的MOSFET电动机开关 21622.7.2 使用场效应晶体管的电动机H桥 216 22.7.3 常见晶体管H桥的设计要点 21722.8 用双向模块控制电动机 21822.8.1 使用l293d和754410电动机驱动IC 21922.8.2 附加项目:使用L298电动机驱动IC 22022.8.3 “智能”双向电动机控制模块 22022.9 控制直流电动机的速度 22122.9.1 不应该采取的方法 22122.9.2 基本速度控制 22122.10 附加项目:电动机控制模块的接口电路 222第23章使用舵机 22323.1 遥控舵机的工作原理 22323.1.1 内部结构 22423.1.2 旋转限位 22523.2 R/C舵机的控制信号 22523.2.1 脉冲同样控制着速度 22623.2.2 脉冲宽度范围的变化 22623.3 电位器的作用 22723.4 特殊用途的舵机类型和尺寸 22723.5 齿轮机构和输出力度 22723.6 输出轴的轴衬或轴承 22823.7 典型舵机参数 22823.8 连接器的类型和配线 22923.8.1 连接器的类型 22923.8.2 引出线 23023.8.3 彩色编码 23023.8.4 用排插配合连接器 23023.9 模拟与数字舵机 23123.10 舵机的控制电路 23123.10.1 用单片机控制舵机 23223.10.2 使用串行舵机控制器 23323.10.3 附加项目:使用LM555时基IC控制舵机,以及更多方法23323.10.4 使用超过7.2V的电压 23323.10.5 处理和避免“死区”问题 23323.11 使用连续旋转的舵机 23423.12 把标准舵机改造成可以连续旋转的舵机 234 23.12.1 改造舵机的方法 23523.12.2 基本改造说明 23523.12.3 你需要的工具 23523.12.4 选择要改造的舵机 23623.12.5 改造HitechS—422的步骤 23623.12.6 改造FUTABAS3003舵机的步骤 238 23.12.7 测试改造好的舵机 23823.12.8 改造舵机的局限性 23823.13 用舵机控制传感器转台 239第24章安装电动机和车轮 24024.1 安装直流电动机 24024.1.1 使用安装孔 24024.1.2 使用自带的底座 24124.1.3 使用支架 24124.1.3.1 金属支架 24224.1.3.2 木头或塑料支架 24224.1.3.3 使用夹具 24324.2 用铝槽管安装和校准电动机的位置 243 24.3 安装R/C舵机 24324.3.1 用螺丝安装舵机 24424.3.1.1 特制的舵机安装板 24424.3.1.2 只做你自己的舵机安装板 24424.3.1.3 舵机的“支撑”式安装支架 24524.3.2 用黏合剂固定舵机 24524.4 在轴上安装传动元件 24524.4.1 压接 24524.4.2 螺丝固定 24624.4.3 专门设计的互锁机构 24624.4.4 舵盘 24624.4.5 黏合剂 24624.5 车轮与直流减速电动机的安装 246 24.5.1 使用配套的电动机和车轮 24724.5.2 制作定制车轮 24724.5.2.1 车轮和固定螺丝 24724.5.2.2 使用法兰盘 24824.6 车轮与舵机的安装 24824.6.1 和舵机配套的车轮 24824.6.2 制作和舵机配套的车轮 24824.7 给舵机安装联动机构 24924.7.1 控制直线运动 25024.7.2 增加润滑 25024.8 机器人的传动元件 25024.9 使用刚性和柔性轴连器 25224.9.1 购买现成的轴连器 25224.9.2 制作你自己的刚性轴连器 25324.9.2.1 用管型材制作轴连器 25324.9.2.2 用立柱或螺纹接头制作轴连器 254 24.9.3 制作你自己的柔性轴连器 25524.10 不同轴型的用法 25524.11 你需要了解的一些齿轮方面的知识 256 24.11.1 齿轮入门 25624.11.2 齿轮是圆形的杠杆 25724.11.3 建立齿轮减速 25724.11.4 齿轮齿的种类 25824.11.5 常见齿轮规格 25924.11.6 使用带有减速齿轮的电动机 259 24.11.7 哪里可以找到齿轮 259第25章用形状记忆合金控制机器人的运动 261 25.1 形状记忆合金与机器人技术 26125.2 形状记忆合金基础知识 26125.3 使用形状记忆合金 26225.3.1 终结器 26225.3.2 力矩偏置 26325.3.3 控制电路 26325.4 用单片机控制形状记忆合金 26425.5 试验SMA机械装置 26625.6 使用现成的SMA机械装置 266……第四部分常见机器人项目 269第五部分机器人电子学 331第六部分计算机与电子控制 387第七部分微控制器构成的大脑 421第八部分传感器、导航和反馈 501附录A RBB技术支持网站 614网站内容 614后备技术支持网站 614特殊材料和网站资源 614附录B 在线材料资源 616机器人技术 616电子学 617模型 618论坛和博客 618更多在线资源 618附录C 机械参考 619十进制小数 619钻头和丝锥的尺寸——英制 620钻头和丝锥的尺寸——公制 620钻头的数字与分数英寸对照表 621紧固件:英制螺纹标准一览 621十进制英寸、分数英寸、Mil与Gauge(以铝板为例)的对照表622上网获得更多信息 622附录D 电子参考 623公式 623欧姆定律 623电阻的计算 623计算两个电阻并联 624缩写 624六种最常见的电子计量单位 627电阻色环 628电阻色环编码表 628导线规格 628。
微型机器人制作方法

如何制作微型机器人
微型机器人制作是一个创新而有趣的科技活动。
下面是一些步骤可以帮助你制作自己的微型机器人。
步骤1. 准备硬件和材料
首先,需要一些基础的电子元件和工具,如电池、电机、细金属线等。
可以在电子元件店购买这些物品。
另外,需要一些废旧的玩具和塑料材料作为机器人外壳。
步骤2. 组装机器人电路
使用万用表等工具,在获得的电子元件上连接正确的电线。
然后将电线连接到电池和电机上,组成机器人的基本电路。
步骤3. 制作机器人外壳
使用废旧的玩具和塑料材料,按照个人创意设计机器人的形状和尺寸。
最终可以制作出一个简单而有趣的机器人外壳。
步骤4. 安装电路到外壳中
将组装好的电路安装进机器人的外壳内部。
需要注意电路与外壳之间的安全和合适的固定方式。
步骤5. 测试机器人的功能
连接电池和电机,测试机器人的功能和动作是否符合预期。
需要不断调整细节,确保机器人的运动和外观都准确无误。
通过以上步骤,您可以制作出一个自己的微型机器人。
让我们用科技创造更多有趣的体验吧!。
小型智能机器人制作全攻略

小型智能机器人制作全攻略简介小型智能机器人是近年来备受关注的领域,它能够实现人机互动、自主导航、语音识别等功能,成为了现代科技的新宠儿。
本文将介绍如何制作一台小型智能机器人,供爱好者参考和实践。
所需材料在开始制作小型智能机器人之前,请确保准备了以下材料:1.Arduino主控板2.舵机3.超声波传感器4.电池5.杜邦线6.面包板7.轮子和底盘8.蓝牙模块(可选)步骤1. 硬件组装第一步是组装硬件部分。
按照以下步骤进行操作:1.将Arduino主控板固定在面包板上,确保稳固。
2.连接舵机和轮子,将它们装在底盘上,使机器人能够运动。
3.连接超声波传感器,并将其放置在机器人的前方,用于测量距离。
4.将电池连接到Arduino主控板,以供机器人供电。
5.如果需要,连接蓝牙模块,以便通过手机或电脑控制机器人。
2. 编程完成硬件组装后,开始编写机器人的控制程序。
使用Arduino IDE或其他集成开发环境进行编程:#include <Servo.h>Servo motor;void setup() {motor.attach(9);//连接舵机到引脚9//进行其他设置}void loop() {//在这里实现机器人的行为逻辑}以上是一个基本的Arduino程序框架,你可以根据需要添加更多功能。
例如,你可以使用超声波传感器来测量距离,根据不同的距离来控制机器人的移动方向;也可以使用蓝牙模块实现手机遥控机器人等。
3. 调试和优化编写完控制程序后,将程序上传到Arduino主控板,连接电池并启动机器人。
在使用过程中,你可能会遇到一些问题,如机器人行走不稳定、超声波测距不准确等。
这时需要进行调试和优化,具体方法有:•检查硬件连接是否正确,确保电路没有松动或短路。
•确保舵机的角度调整正确,以便控制机器人的转向。
•校准超声波传感器,确保测量距离的准确性。
•逐步调整程序中的参数和算法,以改进机器人的性能。
4. 扩展功能一旦你完成了基本的小型智能机器人制作,你可以继续扩展它的功能。
纸箱机器人制作方法

纸箱机器人制作方法简介纸箱机器人是一种由纸箱和其他简单材料制成的机器人模型。
制作纸箱机器人可以培养创造力和动手能力,并且可以作为艺术品和装饰品。
本文将介绍一种简单的纸箱机器人制作方法,希望能给大家带来一些灵感和乐趣。
材料准备在制作纸箱机器人之前,我们需要准备一些基本的材料,包括:•纸箱:选择合适大小的纸箱,它将是机器人的主体部分。
•剪刀:用于剪裁纸箱和其他材料。
•胶水或双面胶:用于粘合纸箱和其他材料。
•彩色纸和彩笔:用于装饰机器人。
•其他装饰材料:如杂志图片、毛线等,可根据自己的喜好和创意选择。
制作步骤1.准备纸箱:选择一个合适大小的纸箱作为机器人的主体部分。
确保纸箱没有破损或弯曲,并且可以固定在桌面上。
可以根据自己的需求对纸箱进行裁剪和调整。
2.绘制机器人的外形:使用彩色纸和彩笔来绘制机器人的外形。
可以根据自己的创意想象自己的机器人是什么样子的,可以是一个人形机器人、动物形机器人或是其他有趣的形状。
3.制作机器人的零件:根据机器人的外形,裁剪出相应的零件。
可以使用不同颜色的彩色纸来制作机器人的头、身体、手臂、腿等部分。
使用胶水或双面胶将这些零件粘贴在纸箱上。
4.添加细节和装饰:使用彩色纸、彩笔和其他装饰材料来为机器人添加细节和装饰。
可以添加机器人的眼睛、嘴巴、按钮、螺丝等细节,使机器人更加生动和有趣。
5.完成机器人:经过粘贴和装饰后,你的纸箱机器人就完成了!可以根据自己的需求和创意对机器人进行进一步的调整和装饰。
技巧和注意事项•在裁剪纸箱和其他材料时,一定要小心,避免剪到手指或其他部位。
•使用胶水或双面胶时,要注意使用量,以免造成粘贴不牢固或污染纸箱和其他材料。
•在绘制和装饰机器人时,可以多参考一些图片或设计,获取更多灵感和创意。
•可以将制作纸箱机器人作为家庭活动或手工课的项目,与家人、朋友或同学一起制作,增加乐趣和互动。
结语通过简单的纸箱和一些简单的材料,我们可以制作出有趣的纸箱机器人。
制作纸箱机器人不仅可以锻炼创造力和动手能力,还可以作为艺术品和装饰品。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
我在这里凭自己的经验介绍一些自己动手制作机器人小车的基础知识,如果你是曾经自
己动手做过的高手,那么你可以绕行,我这里介绍的都是为未入门者准备的最基本的理论知
识和一些动手经验。
那么现在我们开始,首先是理论部分——小车的控制结构。
[一]小车的整体控制系统
小车是怎么来控制的?为什么小车判断出障碍物后可以自动的绕开?
理论:控制工程——处理自动控制系统各种工程实现问题的综合工程技术。包括
对自动控制系统提出要求(即规定指标)、进行设计、构造、运行、分析、检验等过程。它
是在电气工程和机械工程的基础上发展起来的。
闭环控制:闭环控制有反馈环节,通过反馈系统是系统的精确度提高,响应时间缩
短,适合于对系统的响应时间,稳定要求高的系统பைடு நூலகம்
编者:机器人天空网站()
2010.04.01
机器人天空()
3
版权声明
本书中所收录的文章除《用Arduino控制的三轮小车》一文外,其余文章全部原创首发
于机器人天空(),转载请注明出处和作者。
文档。希望它可以让更多的机器人爱好者走进到精彩无限的机器人世界中来。
我曾在一篇文章的结尾处这样写到:“我们的作品基本上不会有什么科技价值,也不会
填补什么技术空白,不会为社会主义建设添什么砖加什么瓦,纯粹只是自娱自乐。不过我想,
当更多的人——尤其是学生,以制作机器人作为一种娱乐项目的时候,应该也是一件令人高
障碍物”,“有没有声音信号”等。还有一种返回值返回的是一个已知范围内任意值,比如
一只光敏电阻返回的信号就可能是0~5V范围内的任意电压信号。我一般把这种量称为“强
度量”。它所反映的是一个有效范围内的强度。比如“机器人左边的障碍物有多远”,“现
在的声音信号有多强”等。
“状态量”反映的信息较简单,相应的传感器也较简单,成本较低。而“强度量”反映的
音)的部分,并且可以根据控制器部分的信号调整自己的状态。对机器人小车来说,最基本
的就是轮子。这部分就好比人的四肢一样。
好的,现在我们来分析一下机器人小车的避障行为控制:机器人正在行走过程中(人在
路上走),忽然接收到装在机器人前部的传感器发来的一个“左前方有障碍物”的信号(人
眼发现左前方有一根电线杆),我们事先写在机器人控制芯片中的程序算法要求机器人发现
人看着别人的电路图原理图如坠雾中,完全摸不着头脑;有的人做到一半发现遇到了自己解
决不了的问题,时间一长最后便不了了之;有的人受身边条件所限,想动手却什么都买不到;
时间、金钱……障碍一层又一层。特别是一些非理工科出身的爱好者,满怀着儿时的机器人
梦想,却被一堆专业名词将梦想击得支离破碎。
我也曾浏览过很多的机器人制作相关资料和书籍,也发现现在很多资料和论文还带有很
概念剖析:什么是BEAM机器人?………………………………………………………18
经验篇……………………………………………………………………………………………20
制作机器人常用的单片机性能特点及使用经验…………………………………………21
制作机器人常用传感器盘点………………………………………………………………35
兴的事吧”。直至今天,这仍然是我的目标,希望可以有更多的年轻人投入到哪怕是最简单
的机器人活动中来,那么也不枉本书中收录的那些文章作者的辛勤劳动了。
机器人天空()
6
理论篇
机器人天空()
7
如何制作机器人小车---给初学者
控制器部分、执行器部分。
传感器部分:机器人用来读取各种外部信号的传感器,以及控制机器人行动的各种开关。
好比人的眼睛、耳朵等感觉器官。
控制器部分:接收传感器部分传递过来的信号,并根据事前写入的决策系统(软件程序),
来决定机器人对外部信号的反应,将控制信号发给执行器部分。好比人的大脑。
执行器部分:驱动机器人做出各种行为,包括发出各种信号(点亮发光二极管、发出声
作者:胡泊
最近接触了很多机器人爱好者,很多
人都对机器人技术展示出了浓厚的兴趣,
也在计划如何动手制作自己的第一个机器
人。但是似乎很多的人都摸不到门路,只
能是站在大门外满怀兴趣的向内观望,观
望了一阵兴趣渐失只好叹口气走开……
很多初学者可能都是看了一些视频或
是现场的比赛,勾起了儿时的美好回忆,
制作机器人机械结构的一些经验…………………………………………………………41
看看你的实验室还缺了什么………………………………………………………………45
项目篇……………………………………………………………………………………………51
瓢虫机器人制作教程………………………………………………………………………52
信息则较丰富,相应的传感器的成本就会比较高,同时给控制上也带来了更大的灵活和复杂。
下面我们来看一些常用的传感器:
碰撞开关:电路常开,碰到障碍物后连通,可以用来检测机器人是否发生碰撞。
光敏电阻:光敏电阻器是利用半导体的光电效应制成的一种电阻值随入射光的强弱而改
变的电阻器;入射光强,电阻减小,入射光弱,电阻增大。光敏电阻器一般用于光的测量、
等。
下面我来分别介绍一下这三个部分。
[二]传感器部分
传感器是机器人的眼睛,想要小车完成不同的任务就要配备各种不同的传感器。
现在市场上林林总总的传感器数不胜数,一般个人机器人爱好者经常使用的有碰撞检测
传感器(碰撞开关)、红外测障传感器、红外测距传感器、光敏电阻、电子温度计、电子指
南针等等。
自己的状态,使机器人的前进方向改变,避开障碍物(恭喜你,躲开了电线杆)。
怎么样,是不是有了点机器“人”的意思?
那么这三部分是怎么联系起来的呢?很简单:电!其实机器人小车就是一个电子作品,
传感器将外部的光信号、声音信号、温度信号等全部转换为控制部分可以接受的电信号,控
制系统发出的指令也是各种电信号,通过执行部分转变为电机输出的扭矩、声音、光信号等
机器人天空()
4
目目目目录录录录
前言………………………………………………………………………………………………5
理论篇……………………………………………………………………………………………6
如何制作机器人小车---给初学者………………………………………………………9
创了一些非常适合初学者的图文并茂的文章,在文章中多以实物图为主,抽象图为辅,力图
可以将更多徘徊在门外的爱好者拉进到这扇门里来。直到去年春节前,我忽然意识到机器人
天空网站上现有的一些精品文章已经足够可以拼出一本专门针对入门者的电子书籍来。春节
过后便一直忙于收集资料,请朋友帮忙写一些补充的文章,终于拼出了大家现在看到的这篇
兴起了自己动手制作机器人的念头,很多
人可能并不是嵌入式开发的业内人士,甚
至没有听说过单片机、步进电机这些名词,看着别人满地乱跑的各种机器人,颇有无处下手
机器人天空()
8
的感觉。有的人一上来就准备做一个可以双足行走的人形机器人,可以平稳行走,可以靠摄
5
写在前面
一转眼机器人天空已经运行维护了四年多了,在这四年中认识了全国各地众多热爱机器
人技术的朋友,很多朋友都为机器人天空的发展做出了自己的贡
献。像早期的网友留心、肉粑粑、wen2xiao1、yiyix……还有后
来的hym523、yunkangliu、刘天龙等等我叫得上名字的,许许多
多我叫不上名字的。虽然有人离开,却总是有更多的人进来,这
控制,我就见过一个机器人小车配了一支笔,将机器人放在纸上,机器人一转,刷的一下在
纸上画出一个圈来,当然由于摩擦力和机械误差等原因,画出来的圆圈可能不闭合,也可能
不圆。不过人家阿Q都说了:“孙子才画的圆呢……”
机器人天空()
9
有点迷糊?没关系,其实简单一点说就是这样:机器人可以分为三部分——传感器部分、
日本爱好者制作的微型巡线小车…………………………………………………………68
如何制作你的第一个机器人………………………………………………………………74
基于笔记本电脑的移动机器人……………………………………………………………92
一个BEAM四足机器人的制作过程………………………………………………………105
浓厚的大学教材气息,满篇都是抽象概念和抽象的原理图,很多东西啃了半天弄明白了它的
原理和功能,却连它长什么样子,可以到哪里购买都弄不清楚。这让很多知识结构不够健全
的朋友完全不知该如何下手。最后的感觉就是画张图纸简单,做个实际的东西却是难于登天。
意识到这个问题以后,在维护机器人天空网站的过程中我便有意识地去搜集、翻译、原
用Arduino控制的三轮小车……………………………………………………………116
国内机器人爱好者的作品………………………………………………………………123
资源篇…………………………………………………………………………………………134
机器人天空()
************************************************************************
机器人制作天空宝典
***********************************************************************
一般机器人用的传感器返回的信号分两种:一种返回值很简单,只有两个状态:“有”
机器人天空()
10