摇摆式运输机机构分析
摆动式运输机机构分析
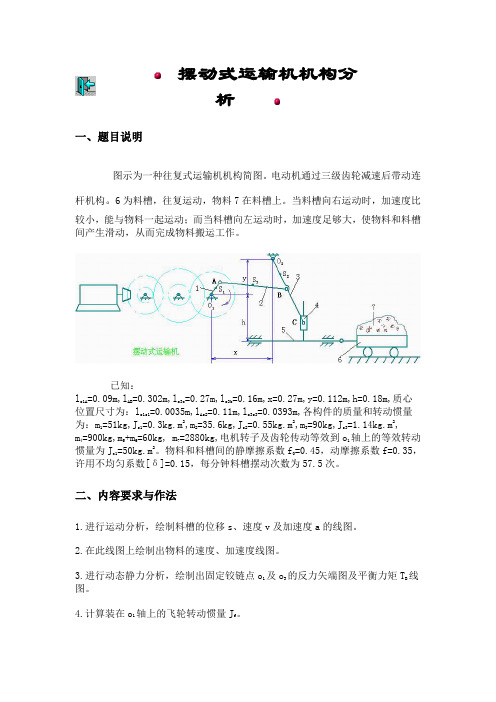
摆动式运输机机构分析一、题目说明图示为一种往复式运输机机构简图。
电动机通过三级齿轮减速后带动连杆机构。
6为料槽,往复运动,物料7在料槽上。
当料槽向右运动时,加速度比较小,能与物料一起运动;而当料槽向左运动时,加速度足够大,使物料和料槽间产生滑动,从而完成物料搬运工作。
已知:l o1A =0.09m,l AB =0.302m,l o3c =0.27m,l o3b =0.16m,x=0.27m,y=0.112m,h=0.18m,质心位置尺寸为:l o1s1=0.0035m,l As2=0.11m,l o3s3=0.0393m,各构件的质量和转动惯量为:m 1=51kg,J s1=0.3kg .m 2,m 2=35.6kg,J s2=0.55kg .m 2,m 3=90kg,J s3=1.14kg .m 2,m 4=900kg,m 5+m 6=60kg, m 7=2880kg,电机转子及齿轮传动等效到o 1轴上的等效转动惯量为J c1=50kg .m 2。
物料和料槽间的静摩擦系数f 0=0.45,动摩擦系数f=0.35,许用不均匀系数[δ]=0.15,每分钟料槽摆动次数为57.5次。
二、内容要求与作法1.进行运动分析,绘制料槽的位移s 、速度v 及加速度a 的线图。
2.在此线图上绘制出物料的速度、加速度线图。
3.进行动态静力分析,绘制出固定铰链点o 1及o 3的反力矢端图及平衡力矩T B 线图。
4.计算装在o 1轴上的飞轮转动惯量J f 。
5.试调整杆机构尺寸,进一步提高运输能力。
三、课程设计说明书内容1.机构简图和已知条件2.物料速度和加速度的求法(开始滑动位置、终止滑动位置、滑动过程中物料的速度、加速度表达式等)。
3.杆组的拆分方法及所调用的杆组子程序中虚参与实参对照表。
4.飞轮转动惯量的计算方法。
5.提高运动能力的措施。
6.自编程序中主要标识符说明。
7.主程序框图。
8.自编程序及计算结果清单。
9.各种线图:①料槽的位移、速度和加速度线图;②物料的速度和加速度线图;③平衡力矩线图;④固定铰链处反力矢端图;⑤等效转动惯量、等效阻力矩和等效驱动力矩线图。
矿山摇摆式输送机设计
矿⼭摇摆式输送机设计摘要当今社会,随着科技的发展,矿⼭摇摆式输送机的应⽤越来越⼴泛,⼈们对输送机的研究从来没有停⽌过,为了满⾜不同的需求,出现了各式各样的输送机,有摇摆式输送机和带式输送机,平板式输送机等为了把⾃⼰所学的专业知识理论更好的应⽤于实际,以摇摆式输送机为⽬标,该输送机主要有三部分组成:连杆机构,电动机,还有个减速器,它的设计是在连杆机构运动分析的基础上,进⾏电动机的选择,减速器零件的设计,其中包含有:轴,齿轮,轴承的设计和校核,材料的选择和附件的设计,最后完成减速器装配,从⽽构建了矿⼭摇摆式输送机,相⽐其他⼏类传输机⽽⾔,该减速器结构简单,装拆使⽤都很⽅便,适⽤范围也⽐较⼴,⼀般可应⽤于煤矿运输,也可⽤于矿⼭⼀类的材料运输。
关键词减速器;传输机;摇摆AbstractToday's society, along with the development of technology, mining sway conveyor application of more and more extensive. People on the conveyor of the study have never stopped. In order to meet different requirements for a wide range of conveyor. A swing-and conveyor belt, such as concrete mixers. With the progress of mankind, more and more and more good swing-conveyor will be manufactured to meet the needs of production development. Through this study and research the subject so that students learn knowledge on a systematic grasp and understanding. They found that training and problem-solving abilities. In order to study their expertise in theory better applied to practical, to sway for the transmission of goals. The design of transmission linkage is in motion analysis on the basis of the choice of motors, parts of the design reducer (shaft, gear, bearing the design and verification), the complete reducer assembly, which built a swing-transfer machine. Keywords Reduction gear Transmission machine Swing⽬录1绪论 (1)1.1毕业设计的⽬的,内容和进⾏形式 (1)1.2机械设计的⼀般过程 (1)1.2.1选定设计的课题 (1)2机构简介和设计数据 (2)2.1机构简介 (2)3连杆机构与物料的运动分析 (2)3.1机构进⾏速度分析 (3)3.2对机构进⾏速度加速度分析 (4)3.3连杆机构与物料的动态静⼒分析 (5)4传动装置的总体设计 (9)4.1动⼒机的机械特性 (9)4.2电动机的选择 (9)4.2.1 确定电动机的转速 (9)4.3总传动⽐的计算与分配 (11)4.3.1总传动⽐的计算 (11)4.3.2传动⽐的分配 (11)5传动零件的设计计算 (13)5.1带传动的设计 (13)5.2齿轮的设计 (15)5.2.1对⾼速级齿轮的参数计算 (15)5.2.2对低速级齿轮的参数计算 (18)6轴和轴承的设计 (22)6.1绘制装配图前的准备⼯作 (22)6.2对轴的设计 (22)6.2.1概述 (23)6.2.2初步设计 (23)6.3轴的校核 (24)6.4轴承的设计 (26)7减速器的附件和机体 (29)7.1附件概述 (29)7.1.1附件 (29)7.1.2轴承端盖设计 (30)7.1.3轴承的润滑与密封 (30)7.2箱体的设计 (30)7.2.1箱体的结构 (30)7.2.2箱体的结构尺⼨ (31)7.2.3箱体设计时应满⾜的要求 (32)7.3承盖、套杯、调整垫⽚组设计与选择 (32) 7.3.1轴承盖 (32)7.4速器的润滑与密封 (33)7.4.1齿轮油的选择 (33)7.4.2润滑济的选择 (33)7.4.3减速器的密封 (34)8机架的设计 (35)结论 (37)致谢 (38)附录 (39)英⽂原⽂: (39)中⽂翻译: (50)1绪论1.1毕业设计的⽬的,内容和进⾏形式培养理论联系实际的设计思想,训练综合运⽤机械设计和有关先修课程的理论,结合⽣产实际分析和解决⼯程实际问题的能⼒,巩固,加深和扩展有关机械设计⽅⾯的知识;通过制定设计⽅案合理选择传动机构和零件类型,正确计算零件⼯作能⼒,确定尺⼨和选择材料,以及较全⾯的考虑加⼯制造⼯艺,使⽤和维护等要求,之后进⾏结构设计,达到了解和掌握机械零件,机械传动装置或简单机械的设计过程和⽅法;进⾏设计基本技能的训练。
摆动式运输机运动分析与动态静力分析
机械原理课程设计摆动式运输机运动分析与动态静力分析院校:************班级:设计者: ***指导教师: ***时间:目录一、设计条件二、设计要求三、运动分析以及动态静力分析四、源程序五、计算结果六、心得体会前言:该运动学分析的任务是:找出角的位置, 驱动杆的角速度和角加速度或位置, 直线运动速度和线性加速度在驱动杆上的点,并找到了驱动力t,根据输入参数驱动线和各个方面各个环节.六杆系统输入数据表方案N1 a b L1L2L3L4L CE M3M4M5L DS3L ES4J s3J s44Pr单位rpm m m m m m m m kg kg kg m m Kgm2Kgm2KNI 460 0.19 0.1 0.12 0. 4 0.44 0.6 0.12 12 26 90 0.08 0.32 0.03 3 2.2一、设计条件1、按照知道教师布置的机构类型和设计参数进行机构分析。
2、已知机构的工作阻力Pr,从动件的工作摆角(舍),主动件角速度W1连杆和滑块的质心位置已知。
主动杆件不考虑惯性力的影响,各杆件的几何尺寸已知。
二、设计要求1、整理说明书一份(主要内容:题目、设计条件及要求、机构运动简图。
数据模型,列出矢量方程,程序流程图,计算结果分析及评估,要求:步骤清楚,叙述简明,文字通顺,书写端正。
)2、画机构运动起始位置简图(在说明书中简单说)。
3、打印结果一份:对应主动件处各位置时,从动件的位移,速度(角速度),加速度(角加速度)和主动件的平衡力偶M(平衡力F)。
4、打印位移S,速度V,加速度A曲线。
三.运动分析以及动态静力分析数学模型计算连杆2 , 3 , 4的角度和滑杆的位置:L1+L2=L3+L ADL1* cosθ1+L2* cosθ2=L3* cosθ3+L ED* cosθ 3L1* sinθ1+L2* sinθ2=L3* sinθ3+L ED* sinθ3θ4=arcsin((b-L3* sinθ3)/L4)从上式可得:θ 2 ,θ3,θ4计算杆和角速度和滑块的速度,对以上的函数求导即可得:ω3=(L1*sin(θ1-θ2)*ω1)/(L3-L ce)*sin(θ3-θ2)ω2=(ω3*(L3-L ce)*sin(θ3)-ω1*L1*sin(θ1))/(L2*sin(θ2))ω4=-(ω3*L3*cos(θ3))/(L4*cos(θ4))v f=-ω3*L3*sin(θ3)-ω4*L4*sin(θ4)对上面的函数求导计算连杆的角加速度和滑块的加速度:ε3=(D*cos(θ2)-E*sin(θ2))/((L3-Lce)*sin(θ2-θ3))ε2=(D+(L3-L ce)* ε3*sin(θ3))/(L2*sin(θ2))ε4=(L4*ω4*ω4*cos(θ4)-L3*(ε3*cos(θ3)-ω3*ω3*sin(θ3)))/(L4*cos(θ4))a f=-L3*(ε3*sin(θ3)+ω3*ω3*cos(θ3))-L4*(ε4*sin(θ4)+ω4*ω4*cos(θ4))D=(L3-L ce)*ω3*ω3*cos(θ3)-L1*(ε1*sin(θ1)+ω1*ω1*cos(θ1))-L2*ω2*ω2*cos(θ2); E=-(L3-L ce)*ω3*ω3*sin(θ3)-L1*(ε1*cos(θ1)-ω1*ω1*sin(θ1))+L2*ω2*ω2*sin(θ2);极限位置图力分析受力图构件1:构件2构件3构件4构件51 如图建立直角坐标系。
机械基础实验报告
摘要实验是教学中的一个重要的环节。
材料力学的结论及定律、材料的力学的性质(机械性质)都要通过实验来验证或测定;各种复杂构件的强度和刚度的研究,也需要通过实验才能解决。
故实验课能巩固、加强和应用基本理论知识,掌握测定材料机械性能及测定应力和变形的基本方法,学会使用有关的机器及仪表(如材料试验机、电阻应变仪等),初步培养独立确定实验方案、分析处理实验结果的能力。
通过实验还能培养严肃认真的工作态度,实事求是的科学作风和爱护财物的优良品质。
因此,实验是工程专业学生必须掌握的基本技能。
随着我国现代化建设事业的发展,新材料、新理论、新技术不断涌现,新型结构层出不穷,给强度问题和实验应力分析提出了许多新的课题。
因此,材料力学实验的内容,愈来愈丰富,实验技术也将变得更为多样并得以提高。
以后要作为一名合格的工程技术人员,只有现在扎实地掌握实验的基础知识和技能,才能较快地接受新的知识内容,赶上科技浪潮。
关键字:实验材料性能实验一缝纫机头机构综合分析一.实验目的及意义1、了解缝纫机头的基本构造与组成,增强对机械零件及机构的感性识。
2、了解各个部件的运动及机构类型。
3、缝纫机机构中连杆机构的特点表现为具有多种多样的结构和多种多样的特性,通过对这一典型机构的运动分析,进一步加深对机构的认识。
二.实验设备及工具1、缝纫机头;2、铅笔,橡皮,三角板等会图工具。
三.实验内容1、JA型家用缝纫机机头的组成机构及其工作原理(1、)JA型家用缝纫机机头从外形看由下列零件组成,如图1-1所示。
图1-1 缝纫机机头外观图1、调压螺钉2、面板3、挑线杆4、夹线器5、夹线簧6、面板线钩7、压脚8、推板9、针板10、下插线杆11、过线器12、针距调节螺钉13、绕线器14、上轮15、上插线杆16、针杆17、针夹18、机针(2、)工作原理:缝纫机的工作循环一般以机针处于最高点为循环的起始点。
机针带着面线自上而下运动,穿过布料,到达最低点,与此同时,挑线机构自上而下摆至接近水平位置,摆梭逆时针摆动,到达勾线准备位置;当机针回升开始,先抛出线环,摆梭则开始顺时针摆动,勾住线环,进而带着绕由底线底梭心穿过线环;与此相配合,挑线机构先是在水平位置附近保持静止,以保证抛出的线环稳定,便于勾线,随后则迅速下摆,为摆梭穿越线环提供足够长的面线;机针继续上升,摆梭完全穿出线环,挑线杆便迅速上摆,收回放出的面线,并从线团中拉出下一循环所需的线,完成一个针迹;在机针退出布料和下一次刺进布料之间的空行程,则是送布机构的工作行程,送布牙被抬起后向前进,完成送布动作。
摇摆送料机构课程设计

摇摆送料机构课程设计一、课程目标知识目标:1. 学生能理解摇摆送料机构的基本概念、组成及工作原理;2. 学生能掌握摇摆送料机构的运动特点及其在自动化设备中的应用;3. 学生能了解摇摆送料机构的设计要点和参数计算方法。
技能目标:1. 学生能运用所学知识,分析摇摆送料机构的运动过程,并进行简单的故障排查;2. 学生能通过实际操作,掌握摇摆送料机构的安装、调试与维护方法;3. 学生能运用计算机辅助设计软件,完成摇摆送料机构的初步设计。
情感态度价值观目标:1. 培养学生对机械设计及其自动化领域的兴趣,激发创新意识;2. 培养学生严谨、细致的学习态度,提高团队协作能力;3. 增强学生对我国制造业的认识,树立正确的价值观。
课程性质:本课程为机械设计基础课程,旨在使学生掌握摇摆送料机构的基本知识,提高实际操作能力。
学生特点:学生具备一定的机械基础知识和动手能力,但缺乏实际操作经验。
教学要求:结合学生特点,注重理论与实践相结合,强化实际操作训练,提高学生的综合应用能力。
将课程目标分解为具体的学习成果,便于教学设计和评估。
二、教学内容1. 摇摆送料机构基本概念:介绍摇摆送料机构的定义、分类及其在自动化设备中的应用。
教材章节:第一章第二节2. 摇摆送料机构组成及工作原理:分析摇摆送料机构的各组成部分及其功能,阐述工作原理。
教材章节:第一章第三节3. 摇摆送料机构的运动特点:讲解摇摆送料机构的运动规律、运动特性及其在实际应用中的优势。
教材章节:第二章第一节4. 摇摆送料机构设计要点与参数计算:介绍摇摆送料机构设计的基本原则、参数计算方法及注意事项。
教材章节:第三章5. 摇摆送料机构的安装、调试与维护:讲解摇摆送料机构的安装方法、调试技巧及日常维护要点。
教材章节:第四章6. 计算机辅助设计软件在摇摆送料机构中的应用:介绍计算机辅助设计软件的使用方法,结合实际案例进行操作演示。
教材章节:第五章7. 实际操作与故障排查:组织学生进行摇摆送料机构的实际操作,培养动手能力,并进行简单的故障排查训练。
摇摆式输送机课程设计
自动机械课程设计说明书题目:摆式送料机构总体设计姓名:学号:专业:班级:学院:农业工程与食品科学学院指导教师:2012年6月9日目录前言 (2)第一章课程设计的指导书 (3)§1-1 课程设计目的 (3)§1-2 课程设计任务 (3)第二章摇摆式输送机设计过程 (4)§2-1 工作原理 (4)§2-2 设计要求及原始数据 (5)§2-3 设计内容及工作量 (5)§2-4 其他设计方案 (5)§2-5 利用解析法确定机构的运动尺寸 (6)§2-6 连杆机构的运动分析 (12)第三章传动系综合 (14)§3-1 电机的初步选择 (14)§3-2 V带的初步选择 (15)第四章课程设计总结 (18)第五章参考文献 (18)前言自动机械设计是一门以机构为研究对象的学科。
自动机械课程设计是使学生较全面的、系统的巩固和加深自动机械课程的基本原理和方法的重要环节,是培养学生“初步具有确定机械运动方案,分析和设计机械的能力”及“开发创新能力”的一种手段。
我们将从机构的运动学以及机器的动力学入手,研究机构运动的确定性和可能性,并进一步讨论机构的组成原理,从几何的观点来研究机构各点的轨迹、位移、速度和加速度的求法,以及按已知条件来设计新的机构的方法。
第一章自动机械设计课程设计指导书一.自动机械设计课程设计的目的自动机械设计课程设计是自动机械设计课程教学中最后的一个重要的实践性教学环节,是培养学个进行自动机械总体方案设计、运动方案设计、执行机构选型设计,传动方案设计控制系统设计以及利用用计算机对工程实际中各种机构进行分析和设计能力的一个重要的川练过程。
其目的如下:(1)通过课程设计,综合运用所学的知识,解决工程实际问题。
并使学生进一步巩固和加深所学的理论知识。
(2)使学生得到拟定机械总体方案、运动方案的训练,并且有初步的机械选型与组合及确定传动方案的能力,培养学生开发、设计、创新机械产品的能力。
摇摆式运输机机构分析
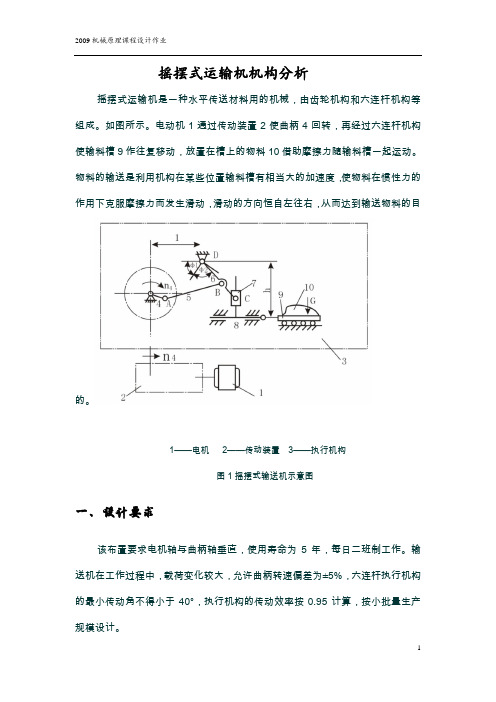
摇摆式运输机机构分析摇摆式运输机是一种水平传送材料用的机械,由齿轮机构和六连杆机构等组成。
如图所示。
电动机1通过传动装置2使曲柄4回转,再经过六连杆机构使输料槽9作往复移动,放置在槽上的物料10借助摩擦力随输料槽一起运动。
物料的输送是利用机构在某些位置输料槽有相当大的加速度,使物料在惯性力的作用下克服摩擦力而发生滑动,滑动的方向恒自左往右,从而达到输送物料的目的。
1——电机2——传动装置3——执行机构图1摇摆式输送机示意图一、设计要求该布置要求电机轴与曲柄轴垂直,使用寿命为5年,每日二班制工作。
输送机在工作过程中,载荷变化较大,允许曲柄转速偏差为±5%,六连杆执行机构的最小传动角不得小于40°,执行机构的传动效率按0.95计算,按小批量生产规模设计。
1.首先进行机构的结构分析并对机构进行杆组分析。
2.进行运动分析,绘制料槽的位移s、速度v及加速度a的线图。
3.进行动态静力分析,绘制出固定铰链点的反力矢端图及平衡力矩T5线图。
4.计算装在o1轴上的飞轮惯量J1。
5.选好电机后并对传动比进行分配和对齿树确定。
6.二、机构的运动分析1、杆长计算。
选择书中第7组数据进行计算及分析。
利用autocad2009软件精确制图,并量出两处需要的杆长。
作图如上。
得出:l OB1=201.1mm ,l OB2=305.96mm.得出l OA=52.43mm,l AB=253.53mm,l=210mm,h=335mm,l CD=210mm,G=2875kg,l DB=126mm,n4=120r/min,f= 0.35,2、杆组的拆分方法由机构的结构分析可知,本结构可分解为主动件单杆,还有RRR杆组及RPP杆组。
如图所示:2.形参与实参对照表1)调用bark函数求2点的运动参数2)调用rrrk函数求2、3构件的位置角、角速度、角加速度和2点的位置,速度和加速度。
3)调用bark 函数求5点的运动参数 4)调用rppk 函数求7点的位置、速度和加速度 5)调用bark 函数求①杆的质心8点的运动参数 6)调用bark函数求②杆的质心9点的运动参数。
《机械原理课程设计》摇摆式输送机的设计
《机械原理课程设计》摇摆式输送机的设计摘要:摇摆式输送机是一种水平传送材料用的机械,由齿轮机构和六连杆机构等组成。
物料的输送是利用机构在某些位置输料槽有相当大加速度,使物料在惯性力的作用下克服摩擦力而发生滑动,滑动的方向恒自左往右,从而达到输送物料的目的。
关键词:减速器;传输机;摇摆0绪论当今社会随着科技的发展人们对于各种资源的需求和消耗是非常巨大的因此就会牵涉到资源的开采问题如何能够高效率,低风险,无污染的开发矿物资源是当今社会面临的重大难题。
所以针对矿产资源而开发的矿山摇摆式输送机的应用就越来越广泛。
事实上人们对输送机的研究从来没有停止过为了满足不同的要求出现了各式各样的输送机有摇摆式输送机和带式输送机等。
摇摆式输送机作为一种传统的输送机械,适用范围非常广。
除粘性大的物料以外,一般的固体散状物料和成件物品均可输送。
已被用于采矿、冶金等部门。
矿山摇摆式运输机能够在恶劣的生产条件下进行工作可以满足很多种工作条件适用范围非常广泛。
由于它的牵引构件和承载构件大多由金属材料制成因而与其他输送机械相比,所输送物料的适应性更强。
摇摆式运输机可输送重的、具有锐利棱边的、磨损性及腐蚀性强的散状物料或物品同时适宜输送高温(600一700℃)物料和成品物体。
另外在输送过程中还可以进行干燥、冷却、分类、清选等各种工艺作业。
1摇摆式运输机机构结构原理如图1所示,电动机1通过传动装置2使曲柄4回转,再经过六连杆机构使输料槽 9 作往复移动,放置在槽上的物料10 借助摩擦力随输料槽一起运动。
1.电机2.传动装置3.执行机图1摇摆式输送机示意图2摇摆式输送机机构结构设计通过查询一般摇摆式输送机说明手册得到一些关键数据如下表所示。
表1a.利用作图法确定机构的运动尺寸根据数据确定六连杆机构的尺寸采用图一所示的机构进行设计,并用CAD作图解法,图解法CAD图如图2所示。
图2根据表1数据,可求得LDB=0.6LDC=0.6*0.27m=0.162m,并做出摇杆的两个极限位置DB1,DB2,利用公式θ=180(K-1)/(K+1),计算出θ=10.19°。
物料传送摇摆式输送机传动装置部件优化设计
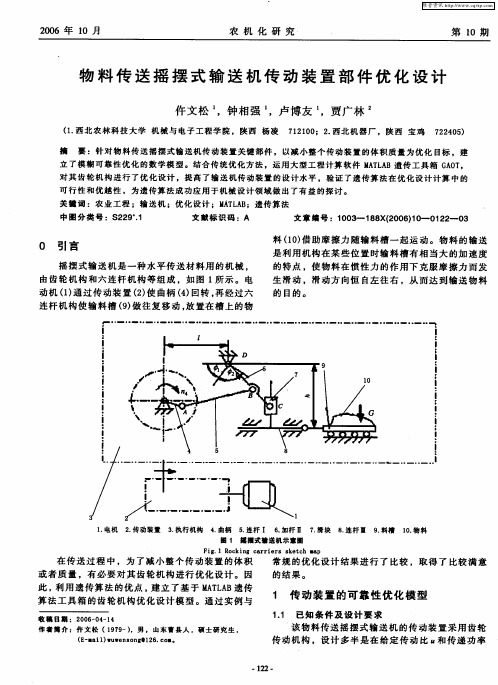
在 传 送 过 程 中 ,为 了减 小 整 个 传 动装 置 的体 积 或 者 质 量 ,有 必 要 对 其 齿 轮 机 构 进 行 优 化设 计 。 因 此 , 用 遗 传 算 法 的 优 点 , 立 了基 于 M T A 利 建 A L B遗传 算 法 工 具 箱 的齿 轮 机 构 优 化设 计 模 型 。通 过 实 例 与
摇 摆 式 输 送 机 是 一 种水 平 传 送 材料 用 的机 械 , 由齿 轮 机 构 和六 连 杆 机 构 等 组 成 ,如 图 1 示 。 电 所 动 机 () 过 传 动 装 置 ( ) 曲柄 ( ) 1通 2使 4 回转 , 经 过 六 再 连 杆 机 构 使 输 料 槽 ( ) 往 复 移 动 , 置 在 槽 上 的 物 9做 放
/1 27xi 17 6 90
2 2 x3
—
_
3 4 4 53 6 8 8 3.1
4
2
3 +53 2x 0 。 .3 1 。
>.o 1o 6
2 0< I 2 3< 1 0 O 1 .5< X I< 5. 0 20< 2 < 40 0. < 5 <1 .5
维普资讯
20 0 6年 l 0月
农 机 化 研 究
第 l 0期
物 料 传 送 摇 摆 式 输 送 机 传 动 装 置 部 件 优 化 设 计
仵 文 松 ,钟 相 强 ,卢 博 友 ,贾 广 林 。
I . .
(. 北 农 林 科 技 大 学 机 械 与 电子 工 程 学 院 ,陕 西 杨 凌 7 2 0 ;2 西 北 机 器 厂 ,陕 西 宝 鸡 72 0 ) 1西 110 . 24 5 摘 要 :针 对 物 料 传 送 摇 摆 式 输 送 机 传 动 装 置 关键 部 件 ,以减 小 整 个 传 动 装 置 的体 积 质 量 为 优化 目标 ,建
摇摆式输送机设计

OB'2 + B'C'2 - OC'2 g1 = arccos = 24.640 < 400 2 OB' B'C'
机构在右极限位置时,在ΔOBC(如图2-5所示)中, 可算得此时机构的传动角:
OB2 + BC2 - OC2 g1 ' = p - arccos = 79.000 2 OB BC
0 g min = g1 = 24.640 < 40,不满足设计要求,故舍 所以,
利用解析法确定机构的运动尺寸
根据设计数据的要求,曲柄4的转速n4=114r/min,其
角速度4为:
114´ 2p w4 = rad / s = 11.94rad / s 60
极位夹角:
K- 1 1.2 - 1 0 q=180 =180 ? K+ 1 1.2 + 1
0
16.360
取右极限位置分析,建立如图坐标系D-XY, 得各点的坐标为: D(0,0) B(-78,78) B'(78,78) C'(130,130) O(225,Oy) C(-130,130) 则:OB=(-303,78-Oy) Oy) BB'=(156,0) OC'=(-95,130-Oy) OB'=(-147,78OC=(-355,130-Oy) OD=(-225,-Oy)
t B
=
在误差允许的范围内,上述理论分析结果与下列曲线上对应时 刻的数据基本一致,故计算是正确的。
摇杆的角速度、角加速度曲线
图2-8
图2-7
图2-9
推杆的位移、速度、加速度曲线
图2-10
图2-12
图2-11
机械课程设计摇摆式输送机
第4章
机构的运动学及动力学数值分析 ................................ 11
4.1 运动学分析 ........................................................................................................................11 4.1.1 建立位移方程 .....................................................................................................11 4.1.2 建立速度方程 .................................................................................................... 13 4.1.3 建立加速度方程 ................................................................................................ 14 4.2 动力学分析 .................................................................................................................... 15
进步,但是与国外相比,仍存在较大的差距。首先是整机性能的落后, 生产输送能力相对较低,事故率高;再者使用寿命短,关键零部件使 用寿命短,可靠性低;还有生产自动化程度不高,过载保护张力调节 能力不足。 国外摇摆式运输机技术发展很快,其主要表现在两个方面;一方 面是摇摆式运输机的功能的多元化,应用范围扩大化,发展成在各个 领域可以使用的运输机械。另一方面是摇摆式运输机本身技术与装备 有了巨大的发展,尤其是长距离、大运量、高速率运输机已成为运输 机发展的主要方向。 摇摆式运输机是为了适合矿山采矿等目的而设计的,因此就要解 决人力问题,最大限度的解放人力劳动,提高矿产资源的开采效率, 增大产量是设计的主要任务。 随着计算机技术和数学最优化理论的发展,使机械设计开始进入 计算机辅助设计和优化设计的阶段。对于能够建立优化数学模型的设 计问题,如机械零件的参数设计,可借助计算机,用数学最优化理论等 方法,使设计问题在满足约束的条件下,自动达到优化方案和优化参
课程设计摇摆送料机构

课程设计摇摆送料机构一、教学目标本课程的学习目标包括知识目标、技能目标和情感态度价值观目标。
知识目标要求学生掌握摇摆送料机构的基本原理、结构和设计方法;技能目标要求学生能够运用所学知识分析和解决实际工程问题;情感态度价值观目标要求学生培养创新意识、团队合作精神和对工程事业的热爱。
二、教学内容教学内容主要包括摇摆送料机构的原理、结构、设计方法和应用。
具体安排如下:1.第一章:摇摆送料机构概述,介绍摇摆送料机构的定义、分类和应用领域。
2.第二章:摇摆送料机构原理,讲解摇摆送料机构的工作原理、动力学分析和运动学分析。
3.第三章:摇摆送料机构结构设计,介绍摇摆送料机构的常见结构形式、设计要求和计算方法。
4.第四章:摇摆送料机构应用,分析摇摆送料机构在实际工程中的应用案例,探讨其优缺点和适用条件。
三、教学方法本课程采用讲授法、讨论法、案例分析法和实验法等多种教学方法。
讲授法用于讲解基本原理和理论知识,讨论法用于引导学生深入思考和探讨问题,案例分析法用于分析实际工程应用,实验法用于验证理论知识并进行实践操作。
四、教学资源教学资源包括教材、参考书、多媒体资料和实验设备。
教材选用《机械设计基础》一书,参考书包括《机械原理》和《机械设计手册》等。
多媒体资料包括教学PPT、视频动画和工程图片等,实验设备包括摇摆送料机构模型和实验仪器等。
教学资源应能够支持教学内容和教学方法的实施,丰富学生的学习体验。
五、教学评估教学评估采用多元化的方式,包括平时表现、作业、考试等。
平时表现主要评估学生的课堂参与度、提问回答和团队协作等情况;作业分为课后练习和项目设计,用于巩固和应用所学知识;考试包括期中考试和期末考试,全面考察学生的知识掌握和应用能力。
评估方式应客观、公正,能够全面反映学生的学习成果。
六、教学安排教学安排规定了教学进度、教学时间和教学地点等。
本课程共32课时,每周2课时,共计16周完成。
教学时间安排在下午或晚上,根据学生的作息时间灵活调整。
摆动式运输机机构课程设计

摆动式运输机机构课程设计
摆动式运输机是一种特殊的飞行器,它的翅膀可以摆动起伏,实现对飞行过程中的稳定、操控以及缩短起飞和降落距离的影响。
为了设计摆动式运输机机构课程,我们需要涵盖以下内容:
1. 摆动式运输机的原理和设计概述:介绍摆动式运输机的原理,包括翅膀摆动的机构设计和工作原理,以及相应的稳定性和操控性优势。
2. 摆动式运输机机构设计的要求和挑战:讲解摆动式运输机机构设计面临的要求和挑战,如结构强度、摆动机构的可靠性和灵活性等。
3. 摆动式运输机机构的设计方法和工具:介绍摆动式运输机机构的设计方法和工具,包括模型分析、仿真和优化设计等。
4. 摆动式运输机机构关键部件的设计:详细介绍摆动式运输机机构的关键部件设计,如摆动关节、扭转箱和控制系统等。
5. 摆动式运输机机构的性能测试和验证:讲解摆动式运输机机构的性能测试和验证,包括静态和动态加载试验等。
6. 摆动式运输机机构的改进和优化:探讨摆动式运输机机构的改进和优化方向,如减轻结构重量、提高摆动机构的响应速度和精度等。
7. 摆动式运输机机构的应用和发展前景:分析摆动式运输机机
构在实际应用中的前景,并探讨未来可能的发展方向,如自适应控制和智能化设计等。
通过以上的课程设计,学生可以全面了解摆动式运输机的机构设计原理和方法,掌握相关的设计工具和技术,以及了解其应用和发展前景。
同时,培养学生的创新能力和团队合作精神,以应对复杂的机构设计和工程挑战。
机械原理课程设计摇摆式输送机
机械原理课程设计摇摆式输送机说明书负责人:何竞飞学院:机电工程学院班级:机械1102班学号: 0806110229 日期: 2013年 7月1 日目录1.设计任务及原始参数…………………………………………… 2.运动方案设计……………………………………………………2.1 主机构方案…………………………………………………2.2 电动机——主机构(齿轮传动机构方案)………………2.3 总体方案图…………………………………………………3. 电动机选择……………………………………………………….3.1 电动机型号………………………………………………3.2 电动机的功率……………………………………………4. 传动比分配………………………………………………………5. 齿轮机构设计……………………………………………………5.1齿轮参数选择…………………………………………………5.2变位齿轮设计…………………………………………………6. 主机构设计………………………………………………………7. 主机构运动分析…………………………………………………8. 主机构受力分析…………………………………………………9. 主机构速度波动调节……………………………………………9.1等效力矩确定………………………………………………9.2最大盈亏功计算……………………………………………9.3等效转动惯量计算…………………………………………9.4飞轮转动惯量计算…………………………………………10. 设计总结…………………………………………………………1. 课程设计的任务机械原理课程设计的任务是对机器的主体机构进行运动分析、动态静力分析,求出所有的运动副反力及平衡力矩。
要求学生根据设计任务,绘制必要的图纸(或编制计算程序),编写设计计算说明书。
要达到课程设计的目的,必须配以课程设计的具体任务:按照选定的机械总功能要求,分解成分功能,进行机构的选型与组合;设计该机械系统的几种运动方案,对各运动方案进行对比和选择;对选定方案中的机构——连杆机构、凸轮机构、齿轮机构,其他常用机构,组合机构等进行运动分析与参数设计;通过计算机编程,将机构运动循环图在计算机屏幕上动态地显示出来,并给出相应的运动参数值。
机械原理课程设计摇摆式输送机
机械原理课程设计摇摆式输送机说明书负责人:何竞飞学院:机电工程学院班级:机械1102班学号: 0806110229 日期: 2013年 7月1 日目录1.设计任务及原始参数…………………………………………… 2.运动方案设计……………………………………………………2.1 主机构方案…………………………………………………2.2 电动机——主机构(齿轮传动机构方案)………………2.3 总体方案图…………………………………………………3. 电动机选择……………………………………………………….3.1 电动机型号………………………………………………3.2 电动机的功率……………………………………………4. 传动比分配………………………………………………………5. 齿轮机构设计……………………………………………………5.1齿轮参数选择…………………………………………………5.2变位齿轮设计…………………………………………………6. 主机构设计………………………………………………………7. 主机构运动分析…………………………………………………8. 主机构受力分析…………………………………………………9. 主机构速度波动调节……………………………………………9.1等效力矩确定………………………………………………9.2最大盈亏功计算……………………………………………9.3等效转动惯量计算…………………………………………9.4飞轮转动惯量计算…………………………………………10. 设计总结…………………………………………………………1. 课程设计的任务机械原理课程设计的任务是对机器的主体机构进行运动分析、动态静力分析,求出所有的运动副反力及平衡力矩。
要求学生根据设计任务,绘制必要的图纸(或编制计算程序),编写设计计算说明书。
要达到课程设计的目的,必须配以课程设计的具体任务:按照选定的机械总功能要求,分解成分功能,进行机构的选型与组合;设计该机械系统的几种运动方案,对各运动方案进行对比和选择;对选定方案中的机构——连杆机构、凸轮机构、齿轮机构,其他常用机构,组合机构等进行运动分析与参数设计;通过计算机编程,将机构运动循环图在计算机屏幕上动态地显示出来,并给出相应的运动参数值。
摇摆式输送机设计概要
目录绪论 (2)一方案设计 (3)二.电动机的选择与计算 (5)1.电动机类型的选择 (5)2.电动机功率的选择 (5)三.传动装置的运动及动力参数的选择及计算 (5)1.传动比 (5)2.各个轴的转速计算 (6)3.各轴的输入功率计算 (6)四.V 带的设计计算 (6)1.计算功率P C (6)2.选取V带型号 (6)3.验算带速 (6)4.从动带轮直径 (6)5.传动比 (7)6.从动轮转速 (7)7.确定中心距a和带长 (7)8.验算小带轮包角Α1 (7)9.确定V带根数Z (7)10.计算单根V带初拉力F (8)11.计算对轴的压力FQ (8)12.确定带轮的结构尺寸 (8)五.齿轮的设计计算 (8)1、高速级减速齿轮设计(直齿圆柱齿轮) (8)1、低速级减速齿轮设计(直齿圆柱齿轮) (10)六.轴的直径计算及校核 (12)1.高速轴的设计 (12)2.中间轴的设计 (18)3.低速轴的设计....................................................... 错误!未定义书签。
七.键连接的选择及计算............................................. 错误!未定义书签。
1.高速轴 ................................................................... 错误!未定义书签。
3.低速轴 ................................................................... 错误!未定义书签。
八.滚动轴承的计算..................................................... 错误!未定义书签。
九.润滑和密封方式的选择......................................... 错误!未定义书签。
摇摆式输送机设计
目录绪论 (4)一方案设计 (4)二.电动机的选择与计算 (6)1.电动机类型的选择 (6)2.电动机功率的选择 (6)三.传动装置的运动及动力参数的选择及计算 (6)1.传动比 (6)2.各个轴的转速计算 (7)3.各轴的输入功率计算 (7)四.V 带的设计计算 (7)1.计算功率P C (7)2.选取V带型号 (7)3.验算带速 (7)4.从动带轮直径 (7)5.传动比 (8)6.从动轮转速 (8)7.确定中心距a和带长 (8)8.验算小带轮包角Α1 (8)9.确定V带根数Z (8)10.计算单根V带初拉力F (9)11.计算对轴的压力FQ (9)12.确定带轮的结构尺寸 (9)五.齿轮的设计计算 (9)1、高速级减速齿轮设计(直齿圆柱齿轮) (9)1、低速级减速齿轮设计(直齿圆柱齿轮) (11)六.轴的直径计算及校核 (13)1.高速轴的设计 (13)2.中间轴的设计 (19)3.低速轴的设计 (20)七.键连接的选择及计算 (21)1.高速轴 (21)2.中间轴 (21)3.低速轴 (22)八.滚动轴承的计算 (22)九.润滑和密封方式的选择 (23)十.箱体及附件的结构设计和选择 (23)1.箱体的选择 (23)2.箱体的结构尺寸 (23)十一.摆杆分析 (27)十二.致谢 (29)十三.参考文献: (29)十四.设计心得 (30)如需要完整文档及cad图等其他文件,请加球球:一九八五六三九七五五绪论1课题设计的目的机械毕业设计是培养学生具有机械系统运动方案设计能力的技术基础,它是机械原理课程的重要实践环节,其目的在于系统地学习课本理论后,通过设计进一步巩固和加深学生的基本概念和基本知识,培养学生分析和解决有关的具体机械所涉及的实际问题的能力,使学生对于机械的选型,运动方案的确定,运动学和动力学的分析和设计有一个较完整的概念,并进一步提高计算,分析,绘图以及查阅和使用资料的综合能力。
一方案设计1、机构简介摇摆式输送机是一种传送材料用的矿山运输机械,其机构运动简图如图。
摆动式货车转向架摇动台及支座结构分析研究_田葆栓
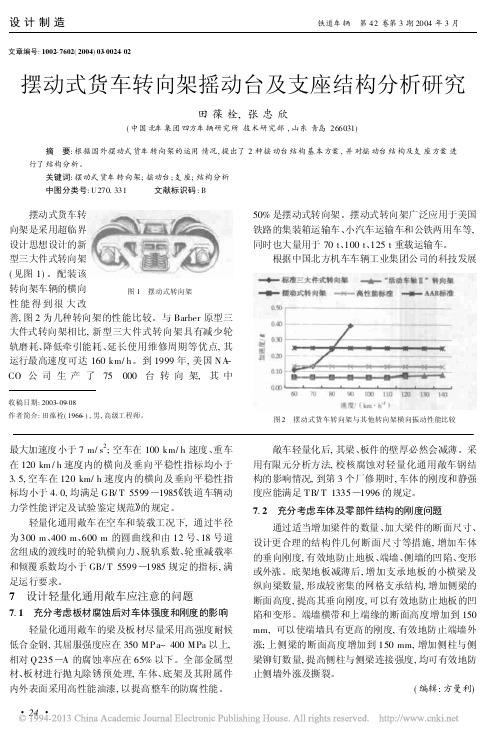
2. 2 计算载荷工况
载荷 计 算方 法 与 1.
2. 3 条相同。计算载荷工
况见表 3, 料的 许用应
力为 195 M Pa。
图 7 摇动台支座有限元模型图
表 3 计算载荷工况
kN
组合载荷 垂向载荷 横向载荷
275 29. 8
垂向 275 + 横向 29. 8
2. 3 计算结果分析
计算结果表明, 在组合载荷工况下, 最大应力值为 7415 MPa, 发生在支座与摇动台圆柱底 部交接处, 其 他部位的应力均较小, 其变形也很小, 满足设计要求, 计算结果见表 4。
方案 2: 底部圆柱不延至工字断面, 且工字断面处
加 4 根筋。
方案 3: 底部圆柱延至工字断面。
1. 2 计算模型
在结构模型的基础上 对摇动台进行 了有限元分
析, 以考察其强度。 1. 2. 1 模型简化及单元划分
该结构对称于横向、纵向 2 个中心面, 主要采用四 面体单元进行网格 的自动 划分, 单 元的总体 尺寸为 15 mm。该模型共 划分了 10 515 个单元, 2 870 个节 点, 有限元模型见图 5。 1. 2. 2 约束设置
低合金钢, 其屈服强度应在 350 MP a~ 400 MPa 以上, 相对 Q235 ) A 的腐蚀率应在 65% 以下。全部金属型 材、板材进行抛丸除锈预处理, 车体、底架及其附属件 内外表面采用高性能油漆, 以提高整车的防腐性能。
# 24 #
敞车轻量化后, 其梁、板件的壁厚必然会减薄。采 用有限元分析方法, 校核腐蚀对轻量化通用敞车钢结 构的影响情况, 到第 3 个厂修期时, 车体的刚度和静强 度应能满足 T B/ T 1335 ) 1996 的规定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摇摆式运输机机构分析摇摆式运输机是一种水平传送材料用的机械,由齿轮机构和六连杆机构等组成。
如图所示。
电动机1通过传动装置2使曲柄4回转,再经过六连杆机构使输料槽9作往复移动,放置在槽上的物料10借助摩擦力随输料槽一起运动。
物料的输送是利用机构在某些位置输料槽有相当大的加速度,使物料在惯性力的作用下克服摩擦力而发生滑动,滑动的方向恒自左往右,从而达到输送物料的目的。
1——电机2——传动装置3——执行机构图1摇摆式输送机示意图一、设计要求该布置要求电机轴与曲柄轴垂直,使用寿命为5年,每日二班制工作。
输送机在工作过程中,载荷变化较大,允许曲柄转速偏差为±5%,六连杆执行机构的最小传动角不得小于40°,执行机构的传动效率按0.95计算,按小批量生产规模设计。
1.首先进行机构的结构分析并对机构进行杆组分析。
2.进行运动分析,绘制料槽的位移s、速度v及加速度a的线图。
3.进行动态静力分析,绘制出固定铰链点的反力矢端图及平衡力矩T5线图。
4.计算装在o1轴上的飞轮惯量J1。
5.选好电机后并对传动比进行分配和对齿树确定。
6.二、机构的运动分析1、杆长计算。
选择书中第7组数据进行计算及分析。
利用autocad2009软件精确制图,并量出两处需要的杆长。
作图如上。
得出:l OB1=201.1mm ,l OB2=305.96mm.得出l OA=52.43mm,l AB=253.53mm,l=210mm,h=335mm,l CD=210mm,G=2875kg,l DB=126mm,n4=120r/min,f= 0.35,2、杆组的拆分方法由机构的结构分析可知,本结构可分解为主动件单杆,还有RRR杆组及RPP杆组。
如图所示:2.形参与实参对照表1)调用bark函数求2点的运动参数2)调用rrrk函数求2、3构件的位置角、角速度、角加速度和2点的位置,速度和加速度。
3)调用bark 函数求5点的运动参数 4)调用rppk 函数求7点的位置、速度和加速度 5)调用bark 函数求①杆的质心8点的运动参数 6)调用bark函数求②杆的质心9点的运动参数。
7)调用bark 函数求③杆的质心10点的运动参数。
三,运动分析1、根据以上分析进行编程,求得料槽的速度和加速度值。
运动分析。
#include "graphics.h"#include "subk.c" /*运动分析子程序*/#include "draw.c" /*绘图子程序*/main(){static double p[20][2],vp[20][2],ap[20][2],del;static double t[10],w[10],e[10];static double pdraw[370],vpdraw[370],apdraw[370],wdraw[370],edraw[370];static int ic; /*定义静态变量*/double r12,r43,r24,r35,r45,r18,r29,r310,gam4;double pi,dr;double r2,vr2,ar2,r3,vr3,ar3;int i; /*定义局部变量*/FILE *fp; /*定义文件指针变量*/char *m[]={"p","vp","ap","w","e"};/*定义字符串,改变字符串会改变绘图结果的标注*/r12=0.05243;r24=0.25353;r43=0.126;r35=0.210;r45=0.084;del=10.0;r18=0.026215;r29=0.126765;r310=0.105;gam4=90.0;e[1]=0.0,t[1]=0.0;t[6]=0.0;w[6]=0.0;e[6]=0.0;p[1][1]=0.0;p[1][2]=0.0;p[3][1]=0.21;p[3][2]=0.24635;p[6][2]=-0.121;p[6][1]=0.0;p[7][2]=-0.121; /*变量赋值*/pi=4.0*atan(1.0); /*求 值*/gam4=gam4*dr;dr=pi/180.0; /*求弧度*/w[1]=-57*pi/15;printf("\n The Kinematic Parameters of Point 7 and Line 3\n"); printf("No THETA1 S7 V7 A7 W3 E3\n"); printf(" deg m m/s m/s/s r/s r/s/s\n");/*在屏幕上写表头*/if((fp=fopen("file1","w"))==NULL){printf("Can't open this file./n");exit(0);} /*建立并打开文件file1*/ fprintf(fp,"\n The Kinematic Parameters of Point 7 and Line 3\n");fprintf(fp,"No THETA1 S7 V7 A7 W3 E3\n"); fprintf(fp," deg m m/s m/s/s r/s r/s/s\n");/*在文件file1中写表头*/ic=(int)(360.0/del);for(i=0;i<=ic;i++){ /*建立循环,调用运动分析子程序*/ t[1]=(-i)*del*dr;bark(1,2,0,1,r12,0.0,0.0,t,w,e,p,vp,ap);rrrk(-1,2,3,4,2,3,r43,r24,t,w,e,p,vp,ap);bark(3,0,5,3,0.0,r35,0.0,t,w,e,p,vp,ap);rppk(5,6,5,7,4,5,6,0.0,0.0,pi/2,&r2,&vr2,&ar2,&r3,&vr3,&ar3,t,w,e,p, vp,ap);bark(1,0,8,1,0.0,r18,0.0,t,w,e,p,vp,ap);bark(2,0,9,2,0.0,r29,0.0,t,w,e,p,vp,ap);bark(3,0,10,1,0.0,r310,0.0,t,w,e,p,vp,ap);printf("\n%2d %12.3f %12.3f %12.3f %12.3f %12.2f % 12.2f",i+1,t[1]/dr,p[7][2],vp[7][1],ap[7][1],w[3],e[3]);/*把运算结果写在屏幕上*/ fprintf(fp,"\n%2d %12.3f %12.3f %12.3f %12.3f %12.2f %12.2f", i+1,t[1]/dr,p[7][1],vp[7][1],ap[7][1],w[3],e[3]);/*把运算结果写入文件file1中*/ pdraw[i]=p[7][1];vpdraw[i]=vp[7][1];apdraw[i]=ap[7][1];wdraw[i]=w[3];edraw[i]=e[3];/*将运算结果传给pdraw[i]、vpdraw[i]、apdraw[i]、wdraw[i]、edraw[i]以备绘图使用*/if((i%16)==0){getch();} /*屏幕满16行停顿*/}fclose(fp); /*关闭文件file1*/ getch();draw1(del,pdraw,vpdraw,apdraw,ic,m); /*调用绘图子程序*/draw2(del,wdraw,edraw,ic); /*主程序结束*/}三.2运行结果:The Kinematic Parameters of Point 7 and Line 3No THETA1 S7 V7 A7 W3 E3deg m m/s m/s/s r/s r/s/s1 0.000 0.184 0.021 -8.699 0.10 -41.752 -10.000 0.183 -0.107 -8.737 -0.51 -41.983 -20.000 0.181 -0.232 -8.379 -1.12 -40.474 -30.000 0.176 -0.350 -7.708 -1.69 -37.655 -40.000 0.170 -0.456 -6.800 -2.21 -33.916 -50.000 0.163 -0.548 -5.710 -2.68 -29.547 -60.000 0.155 -0.623 -4.477 -3.07 -24.698 -70.000 0.145 -0.678 -3.108 -3.40 -19.329 -80.000 0.135 -0.713 -1.569 -3.64 -13.0710 -90.000 0.124 -0.723 0.260 -3.77 -5.0011 -100.000 0.114 -0.702 2.698 -3.76 7.1612 -110.000 0.104 -0.638 6.425 -3.52 28.2013 -120.000 0.095 -0.505 11.952 -2.87 62.5414 -130.000 0.090 -0.296 15.617 -1.72 88.7015 -140.000 0.087 -0.087 11.944 -0.51 70.0316 -150.000 0.087 0.046 6.674 0.27 39.2217 -160.000 0.088 0.120 3.740 0.70 21.5418 -170.000 0.090 0.164 2.426 0.95 13.4519 -180.000 0.093 0.194 1.876 1.12 9.9320 -190.000 0.096 0.220 1.684 1.25 8.5421 -200.000 0.099 0.245 1.672 1.37 8.2122 -210.000 0.103 0.270 1.761 1.49 8.4323 -220.000 0.107 0.296 1.905 1.62 8.9424 -230.000 0.111 0.325 2.070 1.75 9.5325 -240.000 0.116 0.357 2.221 1.90 10.0226 -250.000 0.122 0.390 2.309 2.05 10.1827 -260.000 0.128 0.424 2.269 2.19 9.7028 -270.000 0.134 0.455 2.021 2.32 8.2329 -280.000 0.141 0.481 1.477 2.43 5.4030 -290.000 0.148 0.497 0.565 2.47 0.9431 -300.000 0.156 0.496 -0.730 2.45 -5.2032 -310.000 0.163 0.474 -2.340 2.32 -12.6733 -320.000 0.169 0.427 -4.102 2.07 -20.7634 -330.000 0.175 0.354 -5.798 1.71 -28.4935 -340.000 0.180 0.259 -7.212 1.24 -34.9436 -350.000 0.183 0.145 -8.198 0.70 -39.4437 -360.000 0.184 0.021 -8.699 0.10 -41.75四.静力分析1、调用subk函数计算各个质心的运动参数,计算各构件的惯性力和惯性力矩,从外力已知的杆组开始,依次调用subf函数计算各个力的参数,对各个函数要求的形式参数进行赋值。