5 龙门刨床速度控制系统设计参考答案
基于PLC的龙门刨床工作台多段速控制系统设计
基于PLC的龙门刨床工作台多段速控制系统设计德州职业技术学院 王玉梅【摘要】因为生产工艺,生产效率和生产质量等方面的要求,许多生产机械要求在不同的工作阶段电动机运行在不同的转速,由于变频调速技术的迅速,多数生产机械可以通过变频器实现多段速的运行控制,还可以通过PLC对每段速度的运行时间进行设置,实现多段速运行的自动控制。
【关键词】PLC;变频器;龙门刨床龙门刨床的工作台的运行是自动往复运行控制,在工作台前进阶段加工工件,在工作台返回阶段,不加工工件,为了提高生产效率,要求工作台在前进和后退的控制过程中实现多段速运行控制。
本文通过西门子PLC 控制MM440变频器实现基于PLC 的龙门刨床工作台多段速控制方案。
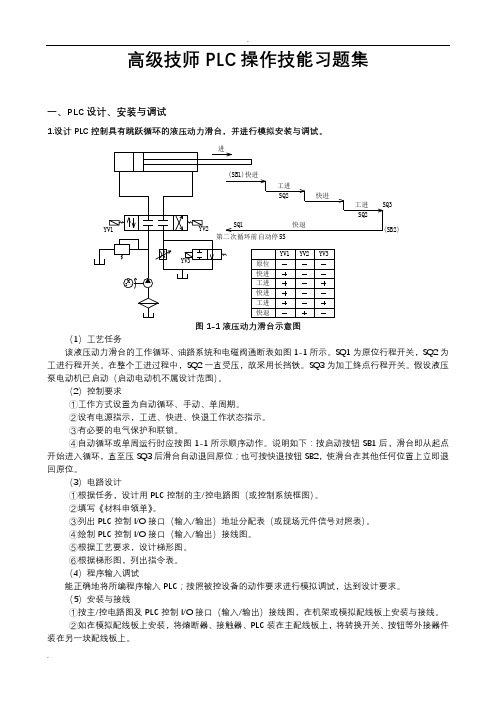
1.工作台控制系统要求一龙门刨床由一台三相异步电动机拖动的工作台自动往复进给控制,刨床工作台停在上限位开关SQ1和左限位开关SQ2位的原点位置。
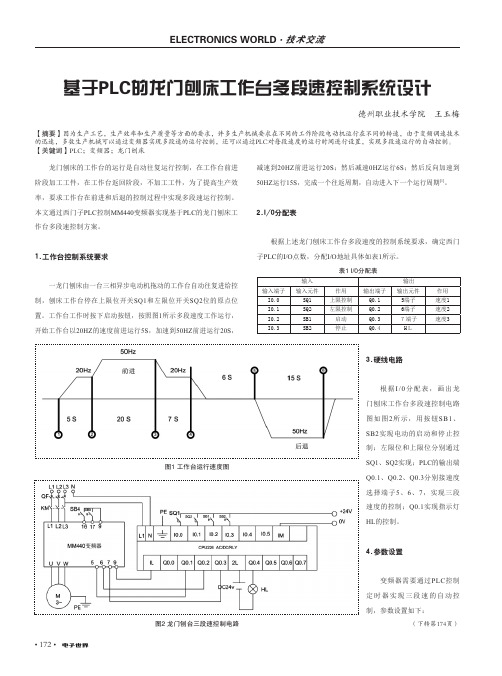
工作台工作时按下启动按钮,按照图1所示多段速度工作运行,开始工作台以20HZ 的速度前进运行5S ,加速到50HZ 前进运行20S ,减速到20HZ 前进运行20S ;然后减速0HZ 运行6S ;然后反向加速到50HZ 运行15S ,完成一个往返周期,自动进入下一个运行周期[1]。
2.I/0分配表根据上述龙门刨床工作台多段速度的控制系统要求,确定西门子PLC 的I/O 点数,分配I/O 地址具体如表1所示。
表1 I/0分配表输入输出输入端子输入元件作用输出端子输出元件作用I0.0SQ1上限控制Q0.15端子速度1I0.1SQ2左限控制Q0.26端子速度2I0.2SB1启动Q0.37端子速度3I0.3SB2停止Q0.4HL图1 工作台运行速度图图2 龙门刨台三段速控制电路3.硬线电路根据I /0分配表,画出龙门刨床工作台多段速控制电路图如图2所示,用按钮SB1、SB2实现电动的启动和停止控制;左限位和上限位分别通过SQ1、SQ2实现;PLC 的输出端Q0.1、Q0.2、Q0.3分别接速度选择端子5、6、7,实现三段速度的控制;Q0.1实现指示灯HL 的控制。
维修电工高级技师PLC 操作技能习题集
.开始进入循环,直至压SQ3后滑台自动退回原位;也可按快退按钮SB2,使滑台在其他任何位置上立即退回原位。
(3)电路设计①根据任务,设计用PLC控制的主/控电路图(或控制系统框图)。
②填写《材料申领单》。
③列出PLC控制I/O接口(输入/输出)地址分配表(或现场元件信号对照表)。
④绘制PLC控制I/O接口(输入/输出)接线图。
⑤根据工艺要求,设计梯形图。
⑥根据梯形图,列出指令表。
(4)程序输入调试能正确地将所编程序输入PLC;按照被控设备的动作要求进行模拟调试,达到设计要求。
(5)安装与接线①按主/控电路图及PLC控制I/O接口(输入/输出)接线图,在机架或模拟配线板上安装与接线。
②如在模拟配线板上安装,将熔断器、接触器、PLC装在主配线板上,将转换开关、按钮等外接器件装在另一块配线板上。
(6)联调试验②填写《材料申领单》。
③列出PLC控制I/O接口(输入/输出)地址分配表(或现场元件信号对照表)。
④绘制PLC控制I/O接口(输入/输出)接线图。
⑤根据工艺要求,设计梯形图。
⑥根据梯形图,列出指令表。
(3)程序输入调试能正确地将所编程序输入PLC;按照被控设备的动作要求进行模拟调试,达到设计要求。
(4)安装与接线①按主/控电路图及PLC控制I/O接口(输入/输出)接线图,在机架或模拟配线板上安装与接线。
②如在模拟配线板上安装,将熔断器、接触器、PLC装在主配线板上,将转换开关、按钮等外接器件装在另一块配线板上。
(5)联调试验正确使用电工工具及万用表,进行仔细检查,最好通电试验一次成功,并注意人身和设备安全。
3.用PLC控制自控成型机的设计。
图1-3 自动成型机示意图(1)工艺过程①初始状态:当原料放入成型机时,液压缸Y1、Y2、Y4为“OFF”,Y3为“ON”,S1、S3、S5为“OFF”,S2、S4、S6为“ON”。
②启动运行:a、当按下启动键SB1,系统动作要求Y2为“ON”时,液压缸B的活塞向下运动,使S4为“OFF”。
电力拖动自动控制系统--运动控制系统第4版-习题答案

习题解答(供参考)习题二2.2 系统的调速范围是1000~100min r ,要求静差率s=2%,那么系统允许的静差转速降是多少? 解:10000.02(100.98) 2.04(1)n n sn rpm D s ∆==⨯⨯=-系统允许的静态速降为2.04rpm 。
2.3 某一调速系统,在额定负载下,最高转速特性为0max 1500min n r =,最低转速特性为0min 150min n r =,带额定负载时的速度降落15min N n r ∆=,且在不同转速下额定速降不变,试问系统能够达到的调速范围有多大?系统允许的静差率是多少?解:1)调速范围 max min D n n =(均指额定负载情况下)max 0max 1500151485N n n n =-∆=-= min 0min 15015135N n n n =-∆=-= max min 148513511D n n ===2) 静差率 01515010%N s n n =∆==2.4 直流电动机为P N =74kW,UN=220V ,I N =378A ,n N =1430r/min ,Ra=0.023Ω。
相控整流器内阻Rrec=0.022Ω。
采用降压调速。
当生产机械要求s=20%时,求系统的调速范围。
如果s=30%时,则系统的调速范围又为多少??解:()(2203780.023)14300.1478N N a N Ce U I R n V rpm =-=-⨯= 378(0.0230.022)0.1478115N n I R C e r p m ∆==⨯+=[(1)]14300.2[115(10.2)] 3.1N D n S n s =∆-=⨯⨯-= [(1)]14300.3[115(10.3)] 5.33N D n S ns =∆-=⨯⨯-=2.5 某龙门刨床工作台采用V-M 调速系统。
已知直流电动机60,220,305,1000min N N N N P kW U V I A n r ====,主电路总电阻R=0.18Ω,Ce=0.2V•min/r,求:(1)当电流连续时,在额定负载下的转速降落N n ∆为多少? (2)开环系统机械特性连续段在额定转速时的静差率N S 多少?(3)若要满足D=20,s ≤5%的要求,额定负载下的转速降落N n ∆又为多少? 解:(1)3050.180.2274.5/min N N n I R Ce r ∆=⨯=⨯= (2) 0274.5(1000274.5)21.5%N N S n n =∆=+=(3) [(1)]10000.05[200.95] 2.63/min N n n S D s r ∆=-=⨯⨯=2.6 有一晶闸管稳压电源,其稳态结构图如图所示,已知给定电压*8.8u U V =、比例调节器放大系数2P K =、晶闸管装置放大系数15S K =、反馈系数γ=0.7。
基于PLC的龙门刨床自动控制设计
机电一体化1234?plc变频器触摸屏综合是以plc和变频器控制系统应用和设计为主线?通过对具体控制系统设计总体方案的拟定?控制系统硬件电路的设计安装以及控制程序的编写?使我们学生综合运用plc技术变频技术传感器技术低压电气控制技术和组态控制技术等各方面知识?把多门专业课程有机的结合起来?进行一次全面的训练
h
结论
在我做课题设计的过程中,无论是在理论学习阶段,还 是在选题、资料查询、开题、研究和撰写的每一个环节, 无不得到陆伟老师的悉心指导。她多次询问研究进程, 并为我指点迷津,帮助我开拓研究思路,精心点拨、热 忱鼓励,感谢她耐心的辅导!这些都将使我终生受益。 借此机会向导师表示衷心的感谢!完成整个论文的过程 中,她不仅提供了大量的资料,及时提出论文中存在的 问题并给予了耐心的指导,对论文初稿进行了认真细致 的审查并提出了许多宝贵的意见。她严谨务实的治学态 度,敏锐的洞察力,准确把握课题研究最新方向的能力 和勇于创新的精神,给我留下了深刻的印象,我从中获 益非浅。为此,特向她致以深深的谢意。
龙门刨床控制系统设计

基于PLC、变频器的龙门刨床控制系统设计要求一、龙门刨床系统介绍龙门刨床是一种广泛使用的金属切削加工机床,是具有门式框架和卧式长床身的刨床,是许多大型企业不可缺少的设备。
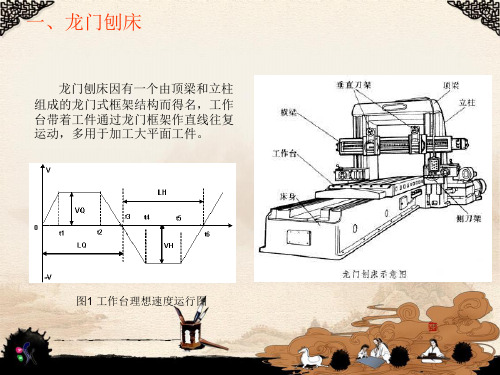
龙门刨床主要用于刨削大型工件,也可在工作台上装夹多个零件同时加工,是制造重型设备(如大型轧钢机,汽轮机,发电机,矿山设备等)不可缺少的工作母机,是用来加工各种平面、斜面、槽,更适合于加工大型而狭长的工件的机床设备(如机床的床身,箱体,导轨等),在机械加工行业里应用十分广泛。
龙门刨床主要分为机械控制和电气控制两大组成部分,生产工艺对刨床电力拖动自动控制系统的要求也越来越高,要使龙门刨床运行在最优状态主要取决于电气控制部分。
龙门刨床工作时需要控制的对象:●工作台的运动:工作台的人工点动运行(进\退),自动往复循环运行及速度变换。
●刀架的运动:垂直刀架和左、右侧刀架的自动进给、手动快速移动;●横梁升降和夹紧等;1.龙门刨床的基本结构龙门刨床主要用来加工各种平面、斜面、槽,更适合于加工大型而狭长的工件,如机床床身、横梁、立柱、导轨和箱体等。
龙门刨床的结构如图9-1所示,主要由以下七个部分组成。
图1.1 龙门刨床的结构(1)机座:是一个箱形体,上有V形和U形导轨,用于安置工作台。
(2)工作台:也叫刨台,用于安置工件。
下有传动机构,可顺着床身的导轨作往复运动。
(3)立柱:用于安置横梁及刀架。
(4)横梁:用于安置垂直刀架,在切削过程中严禁动作,仅在更换工件时移动,用以调整刀架的高度。
(5)垂直刀架:横梁上一般装有左右两个垂直刀架,由一台三相交流异步电动机驱动,通过机械结构切换驱动哪个刀架。
垂直刀架具有自动进给和手动快速移动两种工作方式,每种工作方式下垂直刀架都具有垂直上、下,水平左、右移动四个运动方向。
横梁上的刀架,可在横梁导轨上作横向进给运动,以刨削工件的水平面;刀架亦可偏转一定角度以刨削斜面。
(6)左右侧刀架:在两个立柱上还安装有可沿立柱上下移动的左、右侧刀架, 它们各自由一台三相交流异步电动机驱动,左右侧刀架具有自动进给和手动快速移动两种工作方式,每种工作方式下左右侧刀架只具能沿立柱导轨作上、下运动,以刨削垂直面,以扩大加工范围。
电力拖动自动控制系统(第四版)习题答案-陈伯时

$《电力拖动自动控制系统—运动控制系统》习题2-2 调速系统的调速范围是 1000~100r/min ,要求静差率 s=2%,那么系统允许的稳态速降是 多少解:系统允许的稳态速降sn 0 02 × *100 ∆ n = = = 2 !04(r min ) ( 1 − s : )( 1 − 0 02)2-5 某龙门刨床工作台采用晶闸管整流器-电动机调速系统。
已知直流电动机 = `60kW ,P U = 220 V,,I = 305 A , n = 1000 r 、 min , 主 电 路 总 电 阻 R = 0 18Ω , C & =0 2 V • min r ,求:—(1)当电流连续时,在额定负载下的转速降落∆n 为多少 (2)开环系统机械特性连续段在额定转速时的静差率 s 多少 (3)额定负载下的转速降落 ∆n 为多少,才能满足 D = 20, s ≤ 5% 的要求。
[解:(1)当电流连续时,在额定负载下的转速降落I R 305 × 0 18 ~∆ n = = = 274 5( r ^ min )C 0 2 (2)开环系统机械特性连续段在额定转速时的静差率 |∆ n 274 5 s = = < ≈ 0 215 = 21 5% n — + ∆ n 1000 + 274 5 ^ (3)额定负载下满足 D = 20, s ≤ 5%`要求的转速降落n s 1000 × 0 05 &∆ n = = ≈ 2 63 ( 《rmin ) D ( 1 − 《 s ) 20 × ( 1 − 0@ 05)2-6 有一晶闸管稳压电源,其稳态结构如图所示,已知给定电压 U = 8 8 V \ ,比例调节放大系数 K = 2, 晶闸管装置放大系数 K :=15, 反馈系数 γ = 0 7 。
求: @(1)输出电压 U ;(2)若把反馈线断开, U 为何值开环时的输出电压是闭环时的多少倍 | (3)若把反馈系数减至 γ = 5 U应为多少 ) 解:(1)输出电压K K 2 × 15! U = U = × 8 8 、=12( V ) ; 1 》 + K K γ 1 + 2 × ; 15 × 0 7(2)若把反馈线断开, ! U = K K U = 2 × 。
龙门刨床电气控制系统设计

龙门刨床电气控制系统设计茹亮摘要目前中国在世界上是机床消费的第一大国,并正在由制造大国向制造强国发展,数控机床是制造业的关键设备,数控维修和改造正在成为制造业的新兴产业,其产生和发展有着深刻的社会背景和经济背景。
(1)我国现有数以万计的陈旧落后的机床,这些是机床大修和数控化改造业赖以生存的现实基础之一。
(2)20世纪进口的大量二手数控设备已进入维修和改造的高峰期。
(3)机床及数控设备造价高昂,显著的经济效益是数控改造行业发展的动力,一般改造的费用仅为购置新设备费用的30%左右。
(4)通过数控改造可以进一步满足用户对设备的工艺要求以获取更大的效益。
本文目的就是对龙门刨床进行PLC改造,提高其工作的效率。
PLC作为一种新型的控制装置与传统的继电器控制系统相比具有时间响应快、可靠性好、控制程序可随工艺改变、易与计算机连接、维修方便、体积小、重量轻和功耗底等诸多高品质与功能。
从而减少其维修时间,提高其工作效率。
对于电气车间龙门刨床PLC的研究和实际应用都具有非常高的价值。
关键词:龙门刨床,改造,数控化,PLCElectrical control system design of Planning machineAbstractAt present China is the world's largest machine tool consumer and is manufactured by the manufacturing power to power the development of CNC machine tools is the key to manufacturing equipment, maintenance and improvement of numerical control manufacturing is becoming an emerging industry, its emergence and development of There is a profound social background and economic background.(1) tens of thousands of China's current outdated and backward in mind the machine, these are major repairs and CNC machine tool industry in the transformation of the reality of survival one of the bases.(2) 20th century, a large number of imported second-hand CNC equipment has entered the maintenance and improvement of the peak.(3) And CNC machine tool equipment will cost a significant transformation of the economic benefits of the NC driving force for the development of the industry, the general transformation of the cost of the acquisition of new equipment only costs about 30%.(4) Through the NC can be further modified to meet user requirements for process equipment in order to obtain greater benefits.The purpose of this paper is the transformation of double-housing planer to PLC to enhance the efficiency of its work. PLC as a new type of control device with the traditional relay control systems with fast response time, reliability, and control procedures may change with technology, easy computer connectivity, easy maintenance, small size, light weight and power consumption at the end of and many other high-quality and function. So as to reduce their maintenance time and improve their work efficiency. Workshop for the electrical double-housing planer PLC research and practical applications have very high value.Key words: Gantry planer, alteration, NC, PLC目录1 绪论 (1)1.1龙门刨床简介 (1)1.1.1 龙门刨床定义 (1)1.1.2 龙门刨床的分类 (1)1.1.3 龙门刨床的工作情况 (1)1.2PLC简介 (2)1.2.1 PLC简述 (2)1.2.2 PLC定义 (2)1.2.3 PLC的发展历程 (2)1.2.4 PLC的构成 (3)1.2.5 PLC的特点 (3)1.2.6 PLC分类 (3)1.2.7 PLC应用 (4)1.3设计的提出和主要工作 (5)2 龙门刨床电气控制电路解析 (6)2.1刀架控制电路 (6)2.2横梁控制电路 (6)2.3工作台控制电路 (6)2.4龙门刨床的主回路设计及变频器的选择 (7)2.4.1 龙门刨床电力拖动系统主回路设计 (7)2.4.2 主拖动电机的选型 (8)2.4.3 变频器的选择 (8)3 控制程序设计分析及故障控制分析 (12)3.1控制程序设计分析 (12)3.1.1 工作台控制程序设计分析 (12)3.1.2 风机油泵控制程序设计分析 (12)3.1.3 横梁升降控制程序设计分析 (12)3.1.4 刀架运行控制程序设计分析 (13)3.2故障控制分析 (13)3.2.1 综述 (13)3.2.2 辅助设备常见故障及措施 (13)3.2.3 工作台常见故障及措施 (13)3.2.4 横梁常见故障及措施 (13)4 龙门刨床PLC控制系统组成 (14)4.1龙门刨床运动特点 (14)4.2PLC的类型的选定 (14)4.3工作台控制流程图与程序设计 (14)5 结论 (23)6 谢辞 (24)7 参考文献 (25)1 绪论1.1 龙门刨床简介1.1.1 龙门刨床定义龙门刨床是用来刨削大型零件(如箱体)的刨床。
龙门刨床电气控制系统设计

龙门刨床电气控制系统设计前言:随着社会工业化的飞速发展,机床的自动化和智能化逐渐成为趋势,随着科技的进步,机床传统的手动操纵方法已经不能满足市场需求,自动化和智能化已经成为现代机床的一个重要发展方向。
而机床电气控制系统的质量不仅会影响使用效果和工作效率,更将涉及生产安全和质量问题,因此,机床电气控制系统设计对于机床制造企业的发展至关重要。
一、需求分析本文将针对龙门刨床的电气控制系统设计进行详细的讲解,该机床采用了模块化设计,工作范围广,功率大,适用于加工大件钢铁、铜件及大型机械的加工及修整。
其电气控制系统主要是负责机器的运转、驱动信号的发送和传递等电气部分的控制和实现。
根据对龙门刨床产品和市场的分析,控制系统在以下方面应满足需求:1、能满足负责机器运转的控制,确保机器正常运行;2、能够控制切削液循环泵的启动和关闭;3、工作时能够调整主轴的转速,焊接、维修时能够控制使用主轴等。
以上所有方面都是机床基本操作,并且需要完成相应的自动化控制和智能化管理,为了提高生产效率和工作质量,在本文的设计中,我们采用了自适应控制、能效分析、远程控制监控等多项先进技术。
二、设计方案的选择对于龙门刨床电气控制系统的设计,我们采用了PLC编程控制的方式。
PLC控制器是一种可编程的电子装置,可用于控制机器设备或生产过程中的自动化,实现相应的电气信号控制功能,能够监控输入的数字信号和模拟量输入,在该设备中可用于控制回转式设备、机床、传动装置、装配线等。
PLC控制器具有结构简单,可靠性高、存储容量大等特点,此外,线路通路简单,总成本低,容易维护,因此,PLC控制器是适用于龙门刨床电气控制系统的一种优秀选择。
三、电气控制系统的设计3.1 系统框架龙门刨床电气控制系统的设计框架如下所示:3.2 回路设计为了实现机器工作的自动化控制,我们需要将控制芯片和运动执行部分组成的总体设计为控制回路。
控制回路由两个部分组成:输入回路和输出回路。
龙门刨床的控制系统改造

关
键
词 : 龙 fN床 ; 流调速 ; 造 - J 直 改 类号 : T 5 l 2 T 2 3 G 5 . ;P 7
Re c m fTh nt o y t m f Ga t y Pl ne fl o e Co r lS s e o n r a r r
产效 率 , 必须 尽 量 缩 短换 向过 渡 时 间。但 是 换 向的
 ̄ l 短 , 、 动 电流就 愈 大 , 样 又容 易 损 坏 电 -司愈 t , 起 制 这
机, 而且 换 向时速 度 突 变 使 刨 床 产 生较 大 的机 械 冲
击 , 对 工 作 台主拖 动 直 流 电机 和传 动 机 构 都 有很 这 大 的影 响 , 致传 动部 件 的快 速磨损 , 低刨 削加 工 导 降
求很高 , 由于换 向快 , 正反 向起动 、 动频繁 , 中有 制 其
2 控 制系统 改进 方案 比较
根 据 工艺 需 要 , 计 了龙 门刨 床反 电动 势反 馈 设
很大一部分时间是工作在过渡过程中, 为了提高生
直 流调速 系统 , 以取代原 来 的控 制系统 , 消除其诸 多
收 稿 日期 :0 7l -8 2 0 一10 作 者 简 介 : 阿 勇 (9 7 ) 男 , 西 南 昌人 , 理 工 程 师 , 事 机 电工 程 设计 及 管理 工作 。 陶 17 . , 江 助 从
点。因此 , 平滑调速 , 提高调速精度和工作效率 , 消 除换向冲击 , 保护主电机和传动机构 , 并改善操作性 能, 成为 大型龙 fN床期 待 解决 的技 术 问题 。 - J
l 原 龙 门刨 床 控 制 系统 存 在 的缺 陷
从 龙 门 刨 床 工 作 台速 度 运 行 图 ( 1 可 以看 图 ) 出, 在龙 JN床 的 工作 过 程 中 , 起 动 、 动 特 性 要 ' q 对 制
毕业设计龙门刨床PLC控制系统设计
A
Ld Ia
B
Ud
C
M- Ea
A
VF
VR
B
C
M-
LC 3
LC 4
a)
b)
图3-4 采用三相桥式电路的反并联可逆电路
a)主电路
b)简图
五、逻辑控制的无环流可逆系统
逻辑控制的无环流可逆系统 当一组晶闸管工作时,用逻辑电路(硬件)或逻辑算法(软件)去封锁另一 组晶闸管的触发脉冲,使它完全处于阻断状态,以确保两组晶闸管不同时工作, 从根本上切断了环流的通路,这就是逻辑控制的无环流可逆系统。
图中:ASR为转速调节器,ACR为电流调节器,Un*和Un为转速给定(数字量)和转速反馈(数字量),Ui* 和-Ui为电流给定(数字量)和电流反馈(数字量), TG为测速发电机。
四、应用反并联可控硅整流装置为系统电机供电
三相桥式电路的反并联可逆电路中的环流问题 环流的定义: 采用两组晶闸管反并联的可逆V-M系统,如果两组装置的整流 电压同时出现,便会产生不流过负载而直接在两组晶闸管之间流通的短路电 流,称作环流。 环流的危害 环流加重晶闸管和变压器的负担,消耗功率,环流太大时会导致晶闸管损坏。
问题1:希望在起动过程中只有电流负反馈; 到达稳态转速后,又希望只要转速负反馈, 不再依靠电流负反馈发挥主要的作用。怎 样才能做到这种既存在转速和电流两种负 反馈作用,又使它们只能分别在不同的阶 段起作用呢?双闭环调速系统正是用来解 决这个问题的。
问题2:龙门刨床要求电动机既能正转, 又能反转,还需要快速地起动和制动,这 就需要可逆的调速系统。由于电力电子器 件的单向导电性,需要专用的可逆电力电 子装置来实现。根据任务要求,本次设计 采用了电流、速度双闭环逻辑无环流可逆 直流调速系统。
龙门刨床的试题
龙门刨床考试题及答案
一、填空题
1.龙门刨床是一种加工______类零件的机床。
2.龙门刨床的主运动是______,进给运动是______。
3.龙门刨床的主运动机构通常采用______机构。
4.龙门刨床的工作台通常采用______导轨。
5.龙门刨床的刀架一般采用______刀架或______刀架。
答案:
1.平面
2.主运动;进给运动
3.曲柄摇杆
4.双矩形
5.立式;卧式
二、选择题
1.龙门刨床的主运动机构通常不采用以下哪种机构?
A. 曲柄摇杆机构
B. 双曲柄机构
C. 双摇杆机构
D. 曲柄滑块机构
2.龙门刨床工作台导轨通常采用以下哪种导轨?
A. 滑动导轨
B. 滚动导轨
C. 静压导轨
D. 滚动-滑动导轨
3.在龙门刨床中,通常不采用以下哪种刀架?
A. 立式刀架
B. 卧式刀架
C. 无刀架
D. 转塔刀架
答案:
1.B. 双曲柄机构
2.A. 滑动导轨
3.C. 无刀架
三、简答题
1.简述龙门刨床的主要组成部分。
2.为什么龙门刨床的主运动机构通常采用曲柄摇杆机构?
3.简述龙门刨床工作台导轨的特点和作用。
自动化专业毕业设计课题(5个)

自动化专业毕业设计课题(5个)设计任务书一某钢厂可逆冷轧机主传动晶闸管直流调速系统一、设计题目某钢厂可逆冷轧机主传动晶闸管直流调速系统二、设计目的(1)培养学生查阅技术资料的能力,培养学生综合运用所学知识,结合实际独立完成课题的工作能力。
(2)提高学生对工作认真负责、一丝不苟,对事物能潜心考察、勇于开拓、勇于实践的基本素质。
(3)根据设计要求完成某钢厂可逆冷轧机主传动晶闸管直流调速系统电气设计。
(4)通过设计掌握控制系统的基本设计方法。
使学生的科学实验和工程实践技能的水平、独立工作能力有所提高。
三、设计要求(1)要求冷轧机传动系统要实现可逆无级调速运行,且有较高的稳态控制精度。
调速范围D≥15;静差率s≤2%。
(2)在起、制动过程中要求加减速恒定。
为提高劳动生产率,要求反向要快。
(3)系统要求抗扰能力强,动态品质高,动态速降小,恢复时间短(t≤0.5s)。
(4)系统应具有完善的保护措施。
四、设备技术数据传动系统主电动机额定参数如下:P N=92kW,U N=220V,n N=530 r/min,λ=2,J=7.9kg·m2,励磁方式为他励。
五、设计任务(1)系统总体方案的选择。
(2)各种功能电路或部件的设计与选择、参数计算。
(3)系统各主要保护环节的设计。
(4)系统的转速调节器和电流调节器结构和参数的选择。
(5)系统动态性能指标的计算。
六、应完成的技术资料1、开题报告(2000字左右)2、毕业设计说明书(10000字左右)3、技术资料(1)可逆冷轧机主传动主电路电气原理图(2)可逆冷轧机主传动控制电路电气原理图(3)可逆冷轧机主传动触发电路电气原理图4、外文资料及相应的中文翻译(3000字左右)七、设计时间进度安排(略)设计任务书二微机控制可逆冷轧机主传动晶闸管直流调速系统一、设计题目微机控制可逆冷轧机主传动晶闸管直流调速系统二、设计目的(1)培养学生查阅技术资料的能力,培养学生综合运用所学知识,结合实际独立完成课题的工作能力。
维修电工技师参考题

维修电工技师理论参考题一、选择题1.在过滤变压器油时,应先检查好滤油机并( B )。
滤油现场严禁烟火。
A、接好电源B、接好地线C、做好绝缘防护2.选择三相半控整流电路的SCR时其耐压值应为( C )倍的变压器副边电压值。
A、2B、3C、6D、1.173.晶体管图示仪测量三极管时( C )可以改变特性曲线族之间的间距。
A、阶梯选择B、功耗电阻C、集电极-基极电流/电位D、峰值范围4.变频器与电动机之间一般( B )接入接触器。
A、允许B、不允许C、需要D、不需要5.高性能的高压变频调速装置的主电路开关器件采用( B )。
A、快速恢复二极管B、绝缘栅双极晶体管C、电力晶体管D、功率场效应晶体管6.热继电器的热元件整定电流I FRW=(A)I MNA、±5%B、3C、2D、37.通过( D )使学员的动手能力不断增强和提高,熟练掌握操作技能。
A、示范操作技能B、安全教育C、现场技术指导D、指导操作8.ISO9000族标准与TQC的差别在于:ISO9000族标准是从( B )立场上所规定的质量保证。
A、设计者.B、采购者.C、供应者.D、操作者.9.准时化生产方式企业的经营目标是( C ).A、安全.B、质量.C、利润.D、环保.10.两轴中心距较大的传动方式一般选用(B )A、齿轮B、皮带C、定传动比D、蜗轮蜗杆11.触电者( A )时,应进行人工呼吸。
A、有心跳无呼吸B、有呼吸无心跳C、既无心跳又无呼吸D、既有心跳又有呼吸12.测量轧钢机轧制力时通常选用( B)做传感器.A、压力传感器B、压磁传感器C、霍尔传感器D、压电传感器13.在检修或更换主电路电流表时将电流互感器二次回路( B )拆下电流表.A、断开.B、短路.C、不用处理.D、切掉熔断器.14.B2010型龙门刨床V55系统当电动机低于额定转速采用( C)方式调速。
A、恒功率B、恒转矩C、恒力矩D、弱磁15.( B )为A、 B、、16.测温仪的主机部分由A/D转换器,( B .A、Z80B、MCS-51C、32位D、16位17.进行理论教学培训时,除依据教材外应结合本职业介绍一些( A)的方面的内容。
A系列龙门刨床控制要求

A系列龙门刨床控制要求1.2.1 A系列龙门刨床的控制要求根据龙门刨床的生产工艺特点和要求,对自动控制系统提出如下要求:1、调速范围宽。
龙门刨床工作时既要求能适应不同的刀具,又要求具有经济的切削速度。
因此,调速范围一定要宽,一般不低于10:1,最好为无级调速。
A系列龙门刨床调速范围为20:1(高速90 米/分,低速4.5 米/分)。
2、静差度小。
为了提高加工精度,要求工作台的速度不随切削量的变化而变化,一般要求静差度小于10%。
同时,系统的机械特性应具有下垂特性。
3、具有较高的切削速度(一般不低于75 米/分)和足够的切削力;在低速范围内,切削力基本保持恒定。
4、能单独调整工作行程与返回行程的速度,且退回速度高于工作速度;工作台的运行速度能自动调整,在刀具切入与切出工件时能自动减速。
5、为提高加工表面的精度,工作台反向时应迅速、平稳、冲击小,动态品质要好。
6、操作简单,节省辅助工时,工作台要有可靠的半自动往复循环,调速时不必停车。
7、驱动效率高,耗电量小,安全可靠;8、系统简单,通用化程度高,成本低,易于修理和维护。
1.2.2 A 系列龙门刨床控制系统存在问题[1]原龙门刨床工作台拖动采用了电机扩大机―直流发电机―直流电动机方式,主要存在以下缺点:1、主拖动系统体积大、电耗大、故障率高、维护量大、控制精度差。
2、控制统采用较多的继电器控制电路,可靠性与可维护性差、灵活性差。
3、整个系统保护功能不强,不具备故障自检功能,初开车困难,故障停车时间长。
因此,设备存在的问题严重影响了产品质量和生产的效率。
为此,决定利用先进的PLC 技术和变频技术对该设备控制系统进行设计,以满足生产精度需要。
1.3 课题研究的主要内容电气传动系统采用可编程控制器(PLC)和变频器控制技术具有良好实用前景,既能提高自动化水平,还是节能高效,对提高系统的运行管理水平、减轻环境污染都会起到很好的作用。
目前国内的中小型企业只有一部份采用PLC 控制,所以推广应用这些新技术、新设备的任务仍是十分繁重。
龙门刨床反电动势反馈直流调速系统

龙门刨床反电动势反馈直流调速系统卢伟岸 周国荣中南大学信息科学与工程学院,湖南长沙 410083摘要:在分析和研究龙门刨(B2012A)原控制系统的基础上,设计了龙门刨床反电动势反馈控制系统。
该系统以直流调速器和可编程控制器为主要调速控制器件,能根据主电机实际转速自动调节电枢电流,从而实现工作台的平滑调速,克服了龙门刨床换向冲击大、工作效率不高等一系列缺点。
系统硬件结构简单,控制安全可靠,运行平稳,调速精度高,且经济实用,具有广阔的应用前景。
关键词:龙门刨床;反电动势反馈;平滑调速中图分类号:T G551+.202.35 文献标识码:A 文章编号:1001-2265(2003)03-0069-02Direct current speed control system of the double housing planer using opposing electromotance feedbackL U Weian ZHOU GuorongAbstract:Base on the analysis and research o f the or iginal control system of double housing planer (B2012A ),designed a oppos ing electr omotance feedback control system.T he direct current speed regulator and pr ogrammable controller is in t his system as the main speed governing device,it can automatically regulate the armatur e curr ent according to the r eal rotation speed,and r eal ized smoothly r eg ulating the speed of the work platform.It eliminated the impact of original system ,improved the work efficien cy gr eatly.T he structure of har dware is simple,the controlling is safe and dependable,the moving is smooth and the speed regu lating is precise.Further mo re,this system is econo mical and pr actical,the outlook of it s application is w ide.Key words:double housing planer ;opposing electromotance feedback;smooth speed regulating 图1 原刨床工作台速度运行图龙门刨是一种大型切削机床,其生产工艺特点是工作台与工件频繁地进行往复运动。
(完整word版)龙门刨床plc设计作业1..

目录1。
龙门刨床运动形式及改造要求...................................... - 1 -1.1龙门刨床结构及运动形式................................................................ - 1 -1.2龙门刨床电气控制改造目的及意义............................................... - 3 -1。
3龙门刨床电气控制改造总体要求................................................ - 4 -1。
4龙门刨床电气控制改造方案 ........................................................ - 6 -2.工作台变频调速及PLC控制......................................... - 9 -2.1工作台运动及调速要求.................................................................... - 9 -2.2工作台调速方案 .............................................................................. - 10 -2.3工作台电气控制输入、输出确定................................................. - 11 -2。
4工作台电气控制接线图............................................................... - 13 -2。
5工作台PLC电气控制程序......................................................... - 14 -3。
电机课后习题参考答案

电力拖动基础部分课后习题答案1-8某起重机电力拖动系统如图1-13所示。
电动机kW P N 20=,950/min n r =,传动机构转速比13j =,2 3.5j =,34j =,各级齿轮传递效率1230.95ηηη===,各轴的飞轮矩221125GD N m =∙,22250GD N m =∙,22340GD N m =∙,224460GD N m =∙,卷筒直径0.5D m =,吊钩重01900G N =,被吊重物49000G N =,忽略电动机空载转矩、钢丝绳重量和滑轮传递的损耗,试求:(1)以速度0.3/v m s =提升重物时,负载(重物及吊钩)转矩、卷筒转速、电动机输出功率及电动机的转速;(2)负载的飞轮矩及折算到电动轴上的系统总飞轮矩; (3)以加速度为20.1/m s 提升重物时,电动机输出的转矩。
解:(1)卷筒速度:'12360600.3n 11.46/min 22 3.140.2511.463 3.54481/min v r R n n j j j r ⨯'===∏⨯⨯==⨯⨯⨯=折算到电机转矩:()039.559.55353.64810.95L G G v FvT N m n η+===* (另:()()031900490000.25353.43 3.540.95L G G R G R T N m j j ηη++⨯'*====⋅⨯⨯⨯) 电机输出功率:353.448117.895509550L T n P kw ⨯=== (2)负载飞轮矩:()()22202509000.2512725L G D G G R N m =+*=⨯=⋅折算到电机轴总飞轮矩: (3)∵20.1/a m s =∴20.1/dvm s dt=而6060j 0.142159.622 3.140.25dn dv dt R dt π==⨯⨯=⨯⨯ ∴138.4159.6353.4412375T N m =⨯+=⋅ 1-9某龙门刨床的主传动机构图如图1-14所示。
刨床理论考试试题和答案

刨床理论考试试题和答案一、单项选择题(每题2分,共20分)1. 刨床的主运动是()。
A. 往复直线运动B. 旋转运动C. 往复旋转运动D. 往复摆动运动答案:A2. 刨床加工时,工件的装夹方式是()。
A. 夹紧B. 固定C. 浮动D. 自由答案:A3. 刨床的进给运动是()。
A. 往复直线运动B. 旋转运动C. 往复旋转运动D. 往复摆动运动答案:A4. 刨床加工时,刀具的切削速度一般为()。
A. 10-20m/minB. 20-30m/minC. 30-40m/minD. 40-50m/min答案:B5. 刨床加工时,刀具的进给量一般为()。
A. 0.1-0.3mm/rB. 0.3-0.5mm/rC. 0.5-0.7mm/rD. 0.7-1.0mm/r答案:B6. 刨床加工时,工件的夹紧力一般为()。
A. 1-2kNB. 2-3kNC. 3-4kND. 4-5kN答案:B7. 刨床加工时,刀具的切削深度一般为()。
A. 1-2mmB. 2-3mmC. 3-4mmD. 4-5mm答案:B8. 刨床加工时,工件的表面粗糙度一般为()。
A. Ra1.6-3.2B. Ra3.2-6.3C. Ra6.3-12.5D. Ra12.5-25答案:A9. 刨床加工时,工件的加工精度一般为()。
A. IT7-IT8B. IT6-IT7C. IT5-IT6D. IT4-IT5答案:C10. 刨床加工时,工件的加工效率一般为()。
A. 10-20件/小时B. 20-30件/小时C. 30-40件/小时D. 40-50件/小时答案:B二、多项选择题(每题3分,共15分)1. 刨床加工时,刀具的主要参数包括()。
A. 切削速度B. 进给量C. 切削深度D. 刀具材料答案:ABC2. 刨床加工时,工件的装夹方式包括()。
A. 夹紧B. 固定C. 浮动D. 自由答案:ABC3. 刨床加工时,工件的表面粗糙度的影响因素包括()。
5 龙门刨床速度控制系统设计参考答案

指导教师评定成绩:审定成绩:重庆邮电大学自动化学院自动控制原理课程设计报告设计题目:龙门刨床速度控制系统单位(二级学院):学生姓名:专业:班级:学号:指导教师:设计时间:重庆邮电大学自动化学院制目录一、设计题目 (2)二、设计报告正文 (3)(一)、摘要 (3)(二)、关键字 (3)(三)、报告内容 (4)I,龙门刨床的工作原理 (4)II,各部分的原理及传递函数 (6)III、系统的时域分析和频域分析 (10)(四)、系统校正 (17)三、设计总结 (23)四、参考文献 (23)自动控制原理课程设计任务书龙门刨床速度控制系统原理如下图所示。
要求:查阅相关资料,分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。
分析系统每个环节的输入输出关系,代入相关参数求取系统传递函数。
分析系统时域性能和频域性能。
运用根轨迹法或频率法校正系统,使之满足超调量小于20%,调节时间小于1s。
摘要关键字:一、原理介绍在工业控制中,龙门刨床速度控制系统就是按照反馈控制原理进行工作的。
通常,当龙门刨床加工表面不平整的毛胚时,负载会有很大的波动,但为了保证加工精度和表面光洁度,一般不允许刨床速度变化过大,因此必须对速度进行控制。
图1-1是利用速度反馈对刨床速度进行自动控制的原理示意图。
图中,刨床主电动机SM 是电枢控制的直流电动机,其中电枢电压由晶闸管整流装置KZ 控制,并通过调节触发器CF 的控制电压k u ,来改变电动机的电枢电压,从而改变电动机的速度(被控制量)。
测速发电机TG 是测量元件,用来测量刨床速度并给出与速度成正比的电压t u 。
然后,将t u 反馈到输入端并与给顶电压0u 反向串联便得到偏差电压u =0u -t u 。
在这里,0u 是根据刨床工作情况预先设置的速度给定电压,它与反馈电压t u 相减便形成偏差电压,因此t u 是负反馈电压。
一般,偏差电压比较微弱,需经放大器FD 放大后才能作为触发器的控制电压。
运动控制点题答案

为什么直流PWM变换器 - 电动机系统比晶闸管整流器- 电动机系统能够获得更好的动态性能?答:与 V-M系统相比,直流PWM调速系统在很多方面具有较大的优越性:(1) 主电路简单,需要的电力电子器件少(2)开关频率高,直流容易连续,谐波少,电动机损耗及发热都较小(3)低速性能好,稳速精度高,调速范围宽(4)若与快速响应的电动机配合,则系统频带宽,动态响应快,动态抗扰能力强(5)电力电子开关器件工作在开关状态,导通损耗小,当开关频率适当时,开关损耗也不大,因而装置效率较高( 6)直流电源采用不控整流时,电网功率因素比相控整流器高2-1 直流电动机有哪几种调速方法?各有哪些特点?答:调压调速,弱磁调速,转子回路串电阻调速,变频调速。
特点略。
2-2 简述直流PWM变换器电路的基本结构。
答:直流PWM变换器基本结构如图,包括IGBT 和续流二极管。
三相交流电经过整流滤波后送往直流PWM变换器,通过改变直流PWM变换器中IGBT 的控制脉冲占空比,来调节直流PWM变换器输出电压大小,二极管起续流作用。
2-3 直流 PWM变换器输出电压的特征是什么?答:脉动直流电压。
*2-4 为什么直流PWM变换器电动机系统比V-M 系统能够获得更好的动态性能?答:直流PWM变换器和晶闸管整流装置均可看作是一阶惯性环节。
其中直流PWM变换器的时间常数Ts 等于其 IGBT 控制脉冲周期(1/fc ),晶闸管整流装置的时间常数Ts 通常取其最大失控时间的一半(1/ (2mf)。
因fc 通常为 kHz级,而 f 通常为工频( 50 或 60Hz)为一周内),m整流电压的脉波数,通常也不会超过 20 直流 PWM变换器间常数通常比晶闸管整流装置时间常数更小,从而响应更快,动态性能更好。
*2-5 在直流脉宽调速系统中,当电动机停止不动时,电枢两端是否还有电压?电路中是否还有电流?为什么?答:电枢两端还有电压,因为在直流脉宽调速系统中,电动机电枢两端电压仅取决于直流PWM变换器的输出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
指导教师评定成绩:审定成绩:重庆邮电大学自动化学院自动控制原理课程设计报告设计题目:龙门刨床速度控制系统单位(二级学院):学生姓名:专业:班级:学号:指导教师:设计时间:重庆邮电大学自动化学院制目录一、设计题目 (2)二、设计报告正文 (3)(一)、摘要 (3)(二)、关键字 (3)(三)、报告内容 (4)I,龙门刨床的工作原理 (4)II,各部分的原理及传递函数 (6)III、系统的时域分析和频域分析 (10)(四)、系统校正 (17)三、设计总结 (23)四、参考文献 (23)自动控制原理课程设计任务书龙门刨床速度控制系统原理如下图所示。
要求:查阅相关资料,分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。
分析系统每个环节的输入输出关系,代入相关参数求取系统传递函数。
分析系统时域性能和频域性能。
运用根轨迹法或频率法校正系统,使之满足超调量小于20%,调节时间小于1s。
摘要关键字:一、原理介绍在工业控制中,龙门刨床速度控制系统就是按照反馈控制原理进行工作的。
通常,当龙门刨床加工表面不平整的毛胚时,负载会有很大的波动,但为了保证加工精度和表面光洁度,一般不允许刨床速度变化过大,因此必须对速度进行控制。
图1-1是利用速度反馈对刨床速度进行自动控制的原理示意图。
图中,刨床主电动机SM 是电枢控制的直流电动机,其中电枢电压由晶闸管整流装置KZ 控制,并通过调节触发器CF 的控制电压k u ,来改变电动机的电枢电压,从而改变电动机的速度(被控制量)。
测速发电机TG 是测量元件,用来测量刨床速度并给出与速度成正比的电压t u 。
然后,将t u 反馈到输入端并与给顶电压0u 反向串联便得到偏差电压u =0u -t u 。
在这里,0u 是根据刨床工作情况预先设置的速度给定电压,它与反馈电压t u 相减便形成偏差电压,因此t u 是负反馈电压。
一般,偏差电压比较微弱,需经放大器FD 放大后才能作为触发器的控制电压。
在这个系统中,被控对象是电动机,触发器和整流装置起了执行控制动作的作用,故称为执行元件。
现在具体分析以下刨床速度自动控制的过程。
当刨床正常工作时,对与某给定电压0u ,电动机必有确定的速度给定值n 相对应,同时亦有相应的测速发电机电压t u ,以及相应的偏差电压u 和触发器控制电压k u。
如果刨床负载变化,如增加负载,将使速度降低而偏离给定值,同时,测速发电机电压t u将相应减小,偏差电压u 将因此增大,触发器控制电压k u 也随之增大,从而使晶闸管整流电压a u 升高,逐步使速度回升到给定值附近。
这个过程可用图1-2的一组曲线表明。
由图可见,负载1M 在1T 时突增为2M ,致使电动机速度给定值1N 急剧下降。
但随着u 和a u 的增大,速度很快回升,2T 时速度便回升到2N ,它与给定值1N 已相差无几了。
反之,如果刨床速度因减小负载致使速度上升,则各电压量反向变化,速度回落过程完全一样。
另外,如果调整给定电压0u ,便可改变刨床工作速度。
因此,采取图1-1的自动控制系统,既可以在不同负载下自动为此刨床速度不变,也可以根据需要自动改变刨床都督,其工作原理都是相同的。
它们都是由测量元件(测速发电机)对被控量(速度)进行检测,并将它反馈至比较电路与给定值相减而得到偏差电压(速度负反馈),经放大器放大、变换后,执行元件(触发器和晶闸管整流装置)便依据偏差电压的性质对被控量(速度)进行相应调节,从而使偏差消失或者见效到允许范围。
可见,这是一个由负反馈产生偏差,并利用偏差进行控制直到最后消除偏差的过程,这就是由负反馈控制原理,简称负反馈控制系统。
图1—1龙门刨床速度控制原理图tM M图1—2 龙门刨床速度自动控制过程应当指出的是,图1-1的刨床速度控制系统是一个有静差系统。
由图1-2的速度控制过程曲线可以看出,速度最终达到的稳态值2N 与给定速度1N 之间始终有一个差值存在,这个差值是用来产生一个附加的电动机电枢电压,以补偿因增加负载而引起的速度下降。
因此,差值的存在是保证系统正常过做必需的,一般称为稳态误差。
如果从结构上加以改进,这个稳态误差是可以消除的。
图1-3是与图1-2对应的刨床速度控制系统方块图。
在方块图中,被控对象和控制装置的各元部件(硬件)分别用一些方块表示。
系统中感兴趣的物理量(信号),如电流、电压、温度、位置、速度、压力等,标志在信号线上,其流向用箭头表示。
用进入方块的箭头表示各元部件的输入量,用离开方块的箭头表示输出量,被控对象的输出量便是系统的输出量,既被控量,一般置于方块图的最右端;系统的输入量,一般置于系统方块图的左端。
二、各部分的原理及传递函数 1、比较电路()()()12E s E s E s =- (2---1) 2. 放大环节实物图如下:放大环节的微分方程为c (t)=Kr (t ) ,式中,K 为常数,称放大系数或增益。
放大环节的传递函数为 G (s )=K 。
放大环节的方框图如图所示。
在一定的频率范围内,放大器、减速器、解调器和调制器都可以看成比例环节。
()()c a U s K E s =()E s ()c U s3. 触发环节和晶闸管 实物图如下:在这里把触发器和晶闸管看成一个电子元件把他们的结构和传递函数看成一个统一的整体来研究aK()()01sd c s K U s U s T s =+()c U s ()0d U s故传递函数为:()()01d sc s U s K U s T s =+4.测速发电机 由于测速发电机接有负载电阻,故测速发电机的传递函数为:()()t t m U s K s =Ω 式中,()t U s 是测速发电机经分压后的输出电压;()m s Ω为测速发电机输入角速度,即是电机的角速度。
下图为测速发电机的方框图()s Ω ()U s5电机实物图如下:电机的传递函数如下:t K1ssK T s +电枢回路电压平衡方程()()()a a a a a a di t u t L R i t E dt =++ (2-2)式中a E 是电枢旋转时铲射的反电势,其大小与激磁磁通成正比,方向一样电枢电压()a u t 相反,即a E =()e m C t ω,e C 是反电势系数。
电磁转矩方程()()m m a M t C i t = (2-3) 式中,m C 是电机转矩系数;()m M t 是电枢电流产生的电磁转矩。
电动机轴上的转矩平衡方程()()()()m m m m m c d t J f t M t M t dtωω+=- (2-4)式中,m f 是电动机和负载折合到电动机轴上的粘性摩擦系数;m J 是电动机和负载折合到电动机轴上的转动惯量。
由式(2-2)~(2-4)中校区中间变量()a i t ,a E 及()m M t ,便可得到以()m t ω为输出量,()a u t 为输入量的直流电动机微分方程:22()()()()()()()()m m a m a m a ma m m e m c m a a a c d t d t L J L f R J R f C C t dt dt dM t C u t L R M t dtωωω++++=--(2-5) 在工程应用中,犹豫电枢电路电感a L 较小,通常忽略不计,因而式(2-5) 可简化为 ()()()()m mm m a c c d t T t K u t K M t dtωω+=- (2-6)式中,m T =)a m a m m e R J R f C C +是电动机的时间常数;m K =()m a m m e C R f C C +, c K =()a a m m e R R f C C +是电动机传递系数。
上面我们已经求的电枢控制直流电动机简化后的微分方程为:()()()()12m mm a c dw t T w t K u t K M t dt+=- (2—7) 式中()c M t 可视为负载扰动转矩。
根据线性系统的叠加原理,可分别求()a u t到()m w t 和()c M t 到()m w t 的传递函数,以便研究在()a u t 和()c M t 分别作用下的电动机转速()m w t 的性能,将他们叠加后,便是电动机转速的相应特性。
为求()()m a s U s Ω,令()c M t =0,则有()()()1m mm a dw t T w t K u t dt+= (2—8) 在初始条件下,即()0m w =()'0m w =0时,对上式各项求拉氏变换,并令()()m m s w t ϑΩ=⎡⎤⎣⎦,()()a a U s u t ϑ=⎡⎤⎣⎦则的s 的传递方程()()()()11m m a T s s K U s +Ω=,由传递函数定义,于是有 ()()()()11m m c m s K G s M s T s Ω==+ (2—9) 下图是它的方框图()t U s ()m s Ω龙门刨床动态结构框图:图1—3由于我们用主导零级点简化了系统的特征根方程,再加上该处认为负载转矩零,通过上面的公式推导我们得出了简化系统动态结构框图。
龙门刨床的动态构简化框图如下:()1m m K T s +图1—4故该系统的开环传递函数如下:()()()011s p s m s m K K K G T s T s α=++ (2—10))三、对系统稳定性的评估在这里在系统的参数如下:p K = 24 s K = 20 m K =10 α=0.04 s T =0.4 m T =10故把上面的参数带入上面的式子中可得开环传递函数为: ()()()076.80.41101s G s s =++ (3---1)可知()0276.8410.41s G s s =++ (3---2) 根据上面的式子可以得出该系统的闭环传递函数为:()21920410.477.8s G s s =++ (3---3) 有根据研究结果的普遍意义,可以将(1---4)式表示为如下标准形式: ()2222n s n nG s s ωζωωα=++ (3---4) 由式(1---4)和式(1---5)相等可知:n ω=4.4101 ζ=0.2948 1、开环系统的零极点和图形开环传递函数即式(1---2)可知两个开环极点为:1s =-2.1 2s =-0.12、该系统的开环根轨迹图 根轨迹突的分离点d 为:11050.17d d =+++ (3---5)⇒d=-1.3 ()21ak n mπ+ϕ=- k=0,±1,±2。
(3---6)⇒a ϕ=±2π11nm iji j a p zn mσ==-=-∑∑ (3---7)⇒a σ=-1.3根据上面所得的数据可以画出该系统开环传递函数的根轨迹图形见图1—5图1—5该系统的零极点图如图1—6所示:图1—6 3、开环函数的极坐标图该系统的极坐标图如图1—7所示4、该系统的动态性能指标该系统的动态图如图1—8所示:图1—8其中:d ωω= (3---8)r dt πβω-=(3---9) 10.7d nt ζω+=(3---10)p nt πω=(3---11) 3.5s nt ζω=(3---12)()()()100%p a h t h h σ-∞=⨯∞ (3---13)由上面算出来的n ω和ζ带入上面的公式中我们得出该系统的动态稳定性能为:4.2143d ω= d t =0.2735s r t =0.4437s p t =0.7455s s t =3.3846s a σ=37.94% 1.2716β= 5、稳态性能的分析稳态误差是描述系统稳定性能的一种性能指标,在阶跃信号、斜坡信号作用下进行测定和计算。