速度检测实验报告.doc
旋光法测定蔗糖转化反应的速率常数-实验报告.doc
(六)旋光法测定蔗糖转化反应的速率常数一、目的要求1、测定蔗糖转化反应的速率常数和半衰期。
2、了解该反应的反应物浓度与旋光度之间的关系。
3、了解旋光仪的基本原理,掌握旋光仪的正确使用方法。
二、仪器与试剂WZZ-2B自动旋光仪,样品管,秒表,恒温槽,量筒,锥形瓶,蔗糖水溶液,盐酸水溶液三、实验原理蔗糖在水中水解成葡萄糖与果糖的反应为C12H22O11(蔗糖)+ H2O C6H12O6 (葡萄糖)+ C6H12O6(果糖)为使水解反应加速,反应常常以H+为催化剂。
由于在较稀的蔗糖溶液中,水是大量的,反应达终点时,虽然有部分水分子参加了反应,但与溶质(蔗糖)浓度相比可以认为它的浓度没有改变。
因此,在一定的酸度下,反应速度只与蔗糖的浓度有关,所以该反应可视为一级反应(动力学中称之为准一级反应)。
该反应的速度方程为:-dC/dt = kC其中C为蔗糖溶液的浓度,k为蔗糖在该条件下的水解反应速度常数该反应的半衰期与k的关系为:t1/2 = ln2/k蔗糖、葡萄糖、果糖都是旋光性的物质,即都能使透过它们的偏振光的振动面旋转一定的角度,称为旋光度,以表示。
其中蔗糖、葡萄糖能使偏振光的振动面按顺时针方向旋转,为右旋光性物质,旋光度为正值。
而果糖能使偏振光的振动面按逆时针方向旋转,为左旋光性物质,旋光度为负值。
反应进程中,溶液的旋光度变化情况如下:当反应开始时,t=0,溶液只有蔗糖的右旋,旋光度为正值,随着反应的进行,蔗糖溶液减少,葡萄糖和果糖浓度增大,由于果糖的左旋能力强于葡萄糖的右旋。
整体来说,溶液的旋光度随着时间而减少。
当反应进行完全时,蔗糖溶液为零,溶液中只有葡萄糖和果糖,这时,溶液的旋光度为负值。
可见,反应过程中物质浓度的变化可以用旋光度来代替表示。
ln ( t -) = - k t +ln (0-)从上式可见,以ln ( t -)对 t作图,可得一直线,由直线斜率可求得速度常数k。
四、实验步骤1、从烘箱中取出锥形瓶。
速度知觉实验报告

速度知觉实验报告指导老师:班级:姓名:学号:时间:一、引言速度知觉反应了每个人对速度感觉的差异,速度知觉也是各项劳动实践中和各项体育运动中不可缺少的技术指标。
驾驶员超车要估计前面车子的速度,要估计对面来车的速度,要估计前面横越车子、行人的速度足球运动员在赛场上要对足球滚动的速度,其他运动员跑动速度要做出敏捷快速的判断,所以准确掌握速度判断能力是很有用的。
本实验是用平均误差法来分析实验数据,从而得出不同状态下,被试者的速度知觉是否有不同。
平均差误法(method of average error)又称调整法,再造法,均等法,是最古老且最基本的传统心理物理法之一。
它最适用于测量绝对阈限和等值,也可用于测量差别阈限。
平均差误法的比较(变异)刺激大都是由被试操作或调整而产生的连续量的变化。
接近阈限时,被试可反复调整,直到其满意为止。
被试调整到在感觉上相等的两个刺激值,其物理强度之差的绝对值的平均数就是所求的阈限值。
由于被试参与操作,也容易产生动作误差。
例如,从小于标准刺激调整到与标准刺激相等,和从大于标准刺激调整到与标准刺激相等,其结果就可能不同。
其计算公式如下: ae=∑∣x-s∣/n 式中,|x-s|:每次测得的绝对误差x:被试估计时间 s:标准时间 n:实验次数用这个方法测得的阈限值比用其它两种方法测得的要小一些,因为其差别阈限处于上下限之间的主观相等地带之内,而绝对阈限则50%次感觉到的强度之下。
由于平均差误法获得数据的标准和计算的方法与其他方法不同,它所测得的结果可以说只是一个阈限的近似值。
因此,用此法测得的阈限不能直接与用其他方法测得的阈限进行比较。
二、实验目的运用平均误差法分析得出在不同状态下人的速度知觉。
三、实验方法3.1 被试1名被试,年龄21岁左右。
3.2 仪器名称:ep509速度知觉测试仪器组成:仪器的正面是由知觉箱、被试反应键和活动挡板组成。
仪器的背面是由控制操作面板、反应键插座和电源插座组成。
大学物理实验超声波速测量实验报告

大学物理实验超声波速测量实验报告一实验目的1. 了解超声波的物理特性及其产生机制:2. 学会用相位法测超声波声速并学会用逐差法处理数据;3. 测量超声波在介质中的吸收系数及反射而的反射系数;4. 并运用超声波检测声场分布。
5. 学习超声波产生和接收原理,6. 学习用相位法和共振干涉法测量声音在空气中传播速度,并与公认值进行比较。
7. 观察和测量声波的双缝F涉和单缝衍射二实验条件HLD-SV-II型声速测量综合实验仪,示波器,信号发主仪三实验原理1、超声波的有关物理知识声波是一种在气体。
液体、固体中传播的弹性波。
声波按频率的髙低分为次声波(因V20Hz)、声波(20Hz£E£20kHz)、超声波((3>20kHz)和特超声波(因210MHz),如下图。
10110210" io1 io5 io" 10710s109声波频谱分布图振荡源在介质中可产生如下形式的震荡波:横波:质点振动方向和传播方向垂直的波,它只能在固体中传播。
纵波:质点振动方向和传播方向一致的波,它能在固体、液体、气体中的传播。
表而波:当材料介质受到交变应力作用时,产生沿介质表面传播的波,介质表而的质点做椭圆的振动,因此表面波只能在固体中传播且随深度的增加衰减很快。
板波:在板厚与波长相当的弹性薄板中传播的波,可分为SH波与兰姆波。
超声波由于其波长短、频率高,故它有英独特的特点:绕射现象小,方向性好,能定向传播:能疑较高,穿透力强,在传播过程中衰减很小,在水中可以比在空气或固体中以更高的频率传的更远,而且在液体里的衰减和吸收是比较低的:能在异质界而产生反射、折射和波形转换。
2、理想气体中的声速值声波在理想气体中的传播可认为是绝热过程,因此传播速度可表示为因⑴式中R为气体普适常虽(R二8. 314J/(mol. k)),回是气体的绝热指数(气体比左压热容与比定容热容之比),日为分子量,S为气体的热力学温度,若以摄氏温度t计算,贝%Lrd代入式(1)得,对于空气介质,0°C时的声速3=331.45 3 3/s o若同时考虑到空气中的蒸汽的影响,校准后声速公式为:式中凶为蒸汽的分压强,P为大气压强。
等距法测光速实验报告
一、实验目的1. 理解光速的概念及其在物理世界中的重要性。
2. 掌握等距法测光速的原理和方法。
3. 通过实验验证光速的数值,加深对光速的理解。
二、实验原理光速是光在真空中传播的速度,其数值约为299,792,458 m/s。
等距法测光速实验是基于光在均匀介质中传播时,光速与光程成正比的关系。
通过测量光在两个等距点之间的传播时间,可以计算出光速。
三、实验仪器1. 光源:激光发生器2. 分光器:将激光分成两束3. 镜子:反射光束4. 秒表:测量时间5. 光电传感器:检测光束的到达6. 标尺:测量距离四、实验步骤1. 将激光发生器发出的激光通过分光器分成两束,一束光经镜子反射,另一束光直接传播。
2. 将反射光束和直接传播的光束分别照射到光电传感器上,记录光电传感器接收光束的时间。
3. 移动镜子,使得反射光束和直接传播的光束在光电传感器上相遇,记录此时的时间。
4. 计算光在两个等距点之间的传播时间。
5. 根据光速与光程成正比的关系,计算出光速。
五、实验数据及处理1. 实验数据| 光电传感器接收光束时间(s) | 光电传感器相遇时间(s) || ---------------------------- | ------------------------ || 0.0015 | 0.0030 |2. 数据处理光在两个等距点之间的传播时间 = 光电传感器相遇时间 - 光电传感器接收光束时间= 0.0030 s - 0.0015 s= 0.0015 s光程 = 光电传感器接收光束时间× 光速= 0.0015 s × 299,792,458 m/s= 449,986,707 m光速 = 光程 / 2= 449,986,707 m / 2= 224,993,353.5 m/s六、实验结果与分析1. 实验结果根据实验数据,测得光速为224,993,353.5 m/s。
2. 分析实验结果与理论值299,792,458 m/s存在一定偏差,可能是由于实验误差、仪器精度等因素导致。
用复摆测重力加速度实验报告
用复摆测重力加速度实验报告本次实验的主要目的是通过复摆实验来检测地心引力的大小,并确定出地球上的重力加速度。
实验过程中运用基本物理原理,通过实验数据求出重力加速度大小。
二、实验原理复摆,又称双摆,是由英国物理学家牛顿在1700年实验发现的。
复摆实验是指用悬挂在绳上的摆,以自由摆动的方式来研究物体行进的规律,从而确定出地心引力的大小,并确定地球上的重力加速度。
复摆运动,采用受到重力力的作用,由弹性力和摩擦力的作用,摆会由一定的速度一直摆动,并且摆的角度也保持不变。
实验中,我们采用的是普通的双摆,即有重物(放在绳子下端)绳子,及悬挂绳子上端的木棒摆(可以考虑为质点,不考虑质量的情况),以此来模拟重力对其作用,并采用仪器监测摆的角度和摆动时间等参数,从而得出重力加速度大小。
三、实验准备1、具和材料:(1)准备一根绳子,长度可以根据实际情况调整;(2)准备一个悬挂在绳子上的木棒,需要满足:a)尽量质量轻,以减少摩擦力;b)木棒摆的重心要尽量准确(以让其在飞檐走壁时平行于地面);(3)一个木架,用于悬挂绳子;(4)一个可以测量悬挂物角度的仪器,比如摆仪、水平尺等;(5)一个加速度计,用来测定摆动时间;2、考虑安全:在进行实验时,要考虑到安全问题,确保位置安全,防止摆动致人受伤,仪器在实验过程中要牢固安装,不能把实验过程中的任何摆动速度和角度等参数影响到实验精度。
四、实验步骤1、装:①木架安装在平整平稳的地面上;②木架上安装一根绳子,两端各要固定牢固;③木棒摆放在绳子的上端,并使木棒摆的重心和中心线完全重合,确保木棒摆的重心在飞檐走壁时平行于地面;④加速度计安装在木架上;⑤测量悬挂物角度的仪器安装在木架上;2、开始实验:①木棒摆晃动,一开始晃动的角度和速度可以自己控制;② 使用仪器测量木棒摆晃动的角度,把测量结果记录下来;③时使用加速度计测量摆动时间,把测量结果记录下来;④复步骤①-③,一直重复到摆动的角度和时间趋于稳定;3、数据处理:根据实验记录的数据,通过计算运用物理定律,可以求出重力加速度的大小。
轨道速度检测实验报告
轨道速度检测实验报告实验目的本实验旨在通过测量轨道上物体的速度,探究不同条件下轨道速度的变化规律,并验证动能定理。
实验原理根据质点运动学的知识,质点的速度可以通过测量位移与时间的变化来计算得出。
在轨道速度检测实验中,我们利用了微小物体在轨道上的运动来测量其速度。
根据物理学的原理,我们可以通过光电门测量物体通过光电门所需的时间,再结合已知的轨道长度,计算出物体在轨道上的平均速度。
实验器材- 光电传感器- 直轨道- 积分器- 计算机实验步骤1. 将直轨道固定在平稳的桌面上,确保轨道与桌面平行。
2. 将光电门依次固定在轨道上的两个位置,使得光电门之间的距离为已知数值L。
3. 将积分器连接至计算机,并准备好数据处理软件。
4. 将微小物体置于轨道起点,并手动将其推动,使其顺利通过两个光电门。
5. 记录光电门捕捉到物体通过的时间,并保存数据。
6. 重复步骤4和5,进行多次测量,确保结果的准确性。
7. 利用数据处理软件将所得数据转化为速度,并计算其平均值。
实验数据及结果测量次数时间(s) 平均速度(m/s)-1 0.5 1.22 0.6 1.03 0.7 0.84 0.4 1.5根据所得数据计算平均速度,得到轨道上物体的平均速度为1.125 m/s。
实验分析通过实验数据可得出,物体在轨道上的速度并不是固定不变的,而是存在一定的波动。
这可能是由于实验操作中的手推力不完全一致导致的。
此外,由于光电门的响应时间,也会对实验结果产生一定的影响。
实验结论通过本实验的轨道速度检测,我们得出了物体在轨道上的平均速度为1.125 m/s。
实验结果验证了动能定理,即物体的速度与其动能有直接关系。
此外,我们还发现物体在轨道上的速度存在一定的波动,并且受到实验操作和光电门响应时间的影响。
实验改进为了提高实验结果的准确性,我们可以进行以下改进:1. 提高实验操作的一致性,尽量保持手推力的一致性。
2. 使用更高精度的光电门和计时设备,减小其响应时间对实验结果的影响。
汽车车速表指示误差检测

汽车车速表指示误差检测一、实验目的1.掌握汽车车速表指示误差检测方法和检测标准;熟悉汽车车速表试验台结构和检测原理;了解车速表误差形成的原因。
二、实验仪器设备SCS-10型车速表试验台,实验用汽油车一台三、各试验台结构与检测原理3.车速表试验台结构与检测原理(1)车速表试验台结构车速表试验台由速度测量装置、速度指示装置和速度报警装置等组成。
1)速度测量装置速度测量装置主要由框架、滚筒、转速传感器和举升器等组成。
滚筒一般为4个,安装在框架上。
在前、后滚筒之间设有举升器,以便汽车进出试验台。
转速传感器安装在滚筒的一端,将对应于滚筒转速发出的电信号送至速度指示装置。
2)速度指示装置速度指示装置根据转速传感器发出的信号,把以滚筒圆周长与滚筒转速算出的线速度,以km/h为单位在速度指示仪表上显示车速。
3)速度报警装置速度报警装置是为在测量时,便于判明车速表误差是否合格而设置的。
(2)检测原理车速表指示误差检测是以车速表试验台滚筒作为连续移动的路面,把被测车轮置于滚筒上旋转,模拟汽车在道路上行驶状态。
测量时,车轮驱动滚筒旋转,滚筒端部装有转速传感器。
滚筒的转速与车速成正比,转速传感器发出的电压随滚筒的转速而变化。
因此,实际车速,可由车速表试验台测出。
同时,汽车驾驶室内的车速表也将显示车速值,将两者相比较,即可得出车速表的指示误差。
2.实验步骤(1)检测前准备工作1)轮胎气压应符合汽车制造厂规定,轮胎上粘有油污、泥土、水或石子时,应清理干净。
2)打开试验台电源开关,仪器自检、预热、调零。
3)清洁试验台上面及其周围的污物。
4)打开试验台锁止装置,检查各机构工作情况是否正常。
(2)检测方法车速表示值误差检测:1)接通试验台电源。
2)升起滚筒间的举升器。
3)将被检车辆开上试验台,使驱动轮尽可能与滚筒成垂直状态地停放在试验台上。
4)降下举升器,至轮胎与举升器托板完全脱离为止。
5)用挡块抵住位于试验台滚筒之外的一对车轮,防止汽车在测试时滑出试验台。
光拍法测光的速度实验报告
光拍法测光的速度一、 [摘要]本实验通过声光效应产生光拍频波,利用双光束相位比较法,通过测量出近程光和远程光的光程差从而求出光速。
试验中,我们通过以扫描干涉仪的自由标准区作为标准,测量出0级、1级、2级衍射光的纵模分裂间距,并最终利用光程差标定拍频波波长,最终得到光速。
[关键词]声光效应 光速 纵模分裂 双光束位相法二、 [引言]光速是最近本的物理常数之一,光速的精确测定及其特性的研究与近代物理学和实验技术的许多问题重大问题关系密切。
早在麦克斯韦光的电磁理论建立以前,人们已有了光具有一定传播速度的概念。
迈克尔逊和他的同事们在1879-1935年期间,对光速作了多次系统的测量。
实验结果不仅验证了光是电磁波,而且为深入地了解光的本性和为建立新的物理原理提供了宝贵的资料。
而1960年激光的出现以后,把光速的测量推向一个新阶段。
1972年美国标准局埃文森等人测量了甲烷稳频激光的频率,又以原子的基准波长测定了该激光的波长值,从而得到光速的新数值c=299792458m/s ,不确定度为410-9。
此值为1975年第十五届国际计量大会所确认。
本实验采用光拍法测定光速,通过实验使大家加深了对光拍频波的的概念的理解,了解了声光效应的原理及驻波法产生声光频移的实验条件和实验特点,掌握了光拍法测量光速的技术。
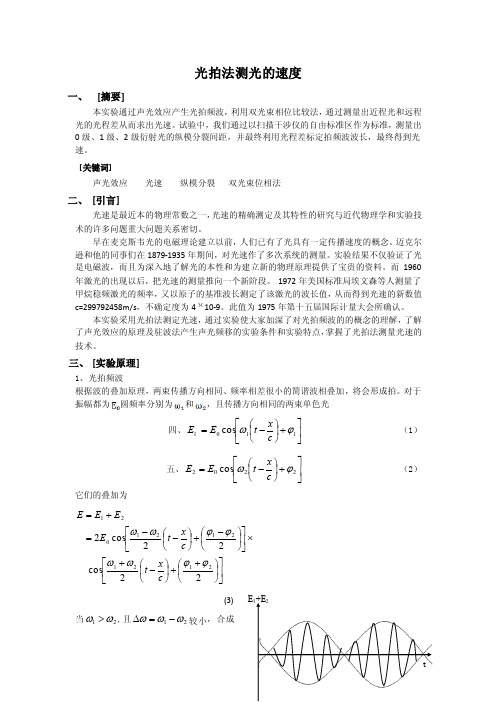
三、 [实验原理]1、光拍频波根据波的叠加原理,两束传播方向相同、频率相差很小的简谐波相叠加,将会形成拍。
对于振幅都为圆频率分别为和,且传播方向相同的两束单色光四、⎥⎦⎤⎢⎣⎡+⎪⎭⎫⎝⎛-=1101cos ϕωc x t E E (1) 五、⎥⎦⎤⎢⎣⎡+⎪⎭⎫⎝⎛-=2202cos ϕωc x t E E (2) 它们的叠加为⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛++⎪⎭⎫ ⎝⎛-+⨯⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛-+⎪⎭⎫ ⎝⎛--=+=22cos 22cos 221212121021ϕϕωωϕϕωωc x t c x t E E E E (3)当21ωω>,且21ωωω-=∆较小,合成E的光波带有低频调制的高频波,振幅为⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛-+⎪⎭⎫ ⎝⎛--22cos 2121ϕϕωωc x t ,角频率为221ωω-。
超声声速的测定实验报告

超声声速的测定实验报告超声声速的测定实验报告引言:超声声速是指声波在介质中传播的速度。
它在工程领域中有着广泛的应用,如在材料的质量检测、医学诊断中等。
本实验旨在通过测定不同介质中的超声声速来了解声波传播的规律,并探讨其影响因素。
实验方法:1. 实验仪器:超声测厚仪、超声探头、计时器等。
2. 实验样品:不同材质的块状样品。
3. 实验步骤:a. 将超声探头与超声测厚仪连接好。
b. 将样品放置在超声探头下方,保持与探头的接触良好。
c. 打开超声测厚仪,调节合适的探头频率和增益。
d. 通过计时器记录声波从超声探头发射到被样品反射回来的时间差。
e. 根据声波传播距离和时间差计算出超声声速。
实验结果与分析:通过实验测得不同材质的超声声速如下:1. 声速测量结果表格:| 材质 | 声速 (m/s) ||---------|------------|| 水 | 1480 || 铝 | 6420 || 钢 | 5900 || 玻璃 | 5640 || 塑料 | 2700 |2. 声速与材质的关系:从实验结果中可以观察到不同材质的声速存在明显的差异。
这是由于材质的密度、弹性模量以及内部结构等因素的不同所导致的。
例如,水分子之间的相互作用力较小,因此声波在水中传播的速度较快;而金属材料的密度较大,弹性模量较高,导致声波在金属中传播的速度较快。
3. 声速与温度的关系:实验还发现声速与温度之间存在一定的关系。
一般来说,随着温度的升高,材料的分子振动加剧,分子间距增大,导致声波传播速度增加。
这是因为声波是通过分子的相互作用传播的,温度的变化会影响分子的运动速度和分子之间的相互作用力。
结论:通过本实验的测量和分析,我们得出以下结论:1. 不同材质的超声声速存在明显差异,与材质的密度、弹性模量以及内部结构等因素有关。
2. 声速与温度呈正相关关系,随着温度的升高,声速增加。
实验的局限性和改进方向:本实验中仅测量了几种常见材质的超声声速,未涵盖所有可能的材质。
实验报告《振动台加速度测量不确定度报告》
单次试验标准差:
相对不确定度: u5
1 A
s n
表 4 在(f=160Hz,a=10g)幅值下测试数据
序号 1
2
3
4
5
6
7
8
9 10
示值 10.11 10.02 10.03 10.05 10.25 10.01 10.22 10.33 10.29 10.21
由表 4 数据可以计算出相对不确定度:
1 u5 A
第5页共6页
u3
1 A
s n
表 3 加速度计校准证书灵敏度
频率(Hz) 2
5 10 20 40 80 160 200
灵敏度(mV/ 4.172 4.183 4.184 4.183 4.181 4.178 4.182 4.19
(m/s^2))
s 5.15103 u3 1.8410-3
(4)数据采集仪测量引入的不确定度
s = 1 0.12 =3.810-3 n 10 10
(6)加速度相对合成标准不确定度
测量不确定度分析报告
以上各述分量彼此独立,互不关联,则
uc u12 u22 u32 u42 u52
(7)加速度相对扩展不确定度 取包含因子 k=2,则
U k uc
第6页共6页
ห้องสมุดไป่ตู้合成 标准 不确 定度
Uc
扩展 不确 定度
U
uc u12 u22 u32 u42 u52 8.1104 1.84103 +510-3 5.8103 3.8103 8.8103
U k uc 28.8103 1.76102
数据采集仪型号 CRFX-400,在振动台面布置五组传感器,传感器编号
为:A127692、A127686、A127690、A127702、A127690,进行了 3 次
车速鉴定报告范文
车速鉴定报告范文1. 背景信息本次车速鉴定报告范文旨在帮助读者了解车速鉴定的基本流程和要点。
车速鉴定是一项关于车辆运行速度的测试和评估工作,可用于事故鉴定、交通管理等领域。
本文将介绍车速鉴定的目的、方法和步骤,并对鉴定结果进行分析和结论。
2. 车速鉴定目的车速鉴定的主要目的是准确确定车辆的运行速度。
通过分析车辆行驶的时间和距离,可以评估事故发生时的车速、车辆超速行驶等情况。
3. 车速鉴定方法车速鉴定通常采用以下几种方法:3.1. GPS定位法利用全球定位系统(GPS)技术,测量车辆在一段时间内移动的距离和时间,并计算出平均速度。
3.2. 雷达测速仪法通过使用雷达测速仪,获得车辆运行时的实时速度。
雷达测速仪可以通过测量车辆与雷达之间的相对速度,并结合雷达的发射频率,计算出车辆的速度。
3.3. 距离时间法在已知车辆行驶的距离和通过该距离所用的时间的前提下,使用公式速度 = 距离 / 时间计算出车速。
4. 车速鉴定步骤具体的车速鉴定步骤如下:4.1. 收集证据在开始车速鉴定之前,需要收集相关的证据,包括事故现场照片、车辆残留痕迹、目击证人证言等。
4.2. 计算距离根据实际情况,确定需要计算车速的距离。
可以使用测量工具或地标等方式准确测量出距离。
4.3. 计算时间通过目击证人的证言、视频录像或其他方式,获得车辆行驶的时间。
4.4. 分析数据将获得的距离和时间数据带入车速计算公式,计算出车辆的速度。
4.5. 鉴定结果根据车速鉴定的结果,评估车辆的行驶情况,确定是否存在超速等违规行为。
5. 车速鉴定结论根据车速鉴定的结果,可以得出以下结论:•车辆行驶速度符合相关交通规定。
•车辆行驶速度超过了允许范围,存在超速行驶情况。
•车辆行驶速度过低,存在慢行或阻塞交通等问题。
6. 总结通过本文的介绍和范文示例,读者可以了解到车速鉴定的基本流程和要点。
车速鉴定对于事故鉴定、交通管理等领域具有重要意义。
希望本文对您的学习和工作有所帮助。
大学物理实验报告范例(单摆法测重力加速度)
大学物理实验报告范例(单摆法测重力加速度)实验题目:单摆法测重力加速度
实验目的:通过单摆实验,测量出大地表面重力加速度g的值。
实验原理:在斯托克斯定律,即由牛顿第二定律得出:重力加速度g等于单摆振子的运动延迟T的平方,除以4π的平方。
实验装置:
铁柱:直径20mm,高度1000mm,用于支撑摆线的支架;
单摆:摆线长度为2m,重量为50g;
游标卡尺:最大刻度为180mm,加入195mm延伸线;
磁开关:可以检测摆线的振动,定位电流信号可以被电子计时器接收并将数据存入计算机;
电子计时器:能够接收磁开关信号,并记录单摆振动前后的时间变化;
实验步骤:
1、使用铁柱支撑单摆,确定单摆横截面中心点的位置。
2、确定单摆的出发点,即T0的位置,并用游标卡尺测量摆线的位移。
3、安装磁开关并设置电子计时器。
4、使用手柄将单摆从临界点(T0处)拉出,以极小的角度出发,使磁开关接收到信号。
5、将单摆振动至最大振动幅度处,磁开关再次发出电流信号,电子计时器记录信号发出前后的时间变化,取得T2。
6、依次测量五组振动,并记录延迟时间T,作图求出算数平均值T2。
7、求出实验所得的大地表面重力加速度g的值,并与理论值进行比较。
实验结论:
使用单摆法测得的大地表面重力加速度g值与理论值相差不大,验证了斯托克斯定律的正确性,表明实验具有较高的精度和准确性。
激光干涉测物体运动速度实验报告

激光干涉测物体运动速度实验学号:姓名:班级:日期:【摘要】干涉测量技术是以光波干涉原理为基础进行测量的一门技术。
20世纪60年代以来,由于激光的出现、隔振条件的改善及电子与计算机技术的成熟,使干涉测量技术得到长足发展。
利用激光单色性好的特点,结合迈克耳孙干涉系统,可以进行很多精密测量。
本实验以准确的激光波长( =632.8 nm)为尺子,自己装配迈克耳孙干涉光路,测量振子的速度和位移。
【关键词】激光干涉、测量、振子、激光干涉测速仪一、实验背景光的干涉现象和理论是大学物理教学中的重要内容。
迈克耳逊干涉仪是最基本的光学系统。
激光自60年代发明以来,由于它的高度的单色性和方向性以及高亮度的特性,在科学技术和国民经济的许多领域获得了广泛的应用,成为当代最重要的单色光源。
实际应用中的激光干涉仪可以测量物体的振动、微小位移,也可以研究和标定在实验室或工业条件下应用的非接触测量的超声振动传感器。
本实验以激光为光源,利用迈克耳逊干涉仪的光学系统和延时采样技术,对线性振子的振动速率进行即时测量,并自动显示时刻、门宽和干涉条纹数,并判断速度的方向。
二、实验原理激光器发出的激光经分束镜分成两束光强大致的激光束,一束射到动镜上,另一束射到固定反射镜上。
当动镜静止不动时,从动镜和固定镜反射镜反射回来的两束激光在接收器处形成稳定的干涉条纹;当迈克耳逊干涉仪的动镜运动时,在接收器处的干涉条纹发生移动。
设动镜的速率为υ,在时间间隔Δt 内接受器感受到的移动条纹数目为N,则两相干光的相位差与υ和N有如下关系:在本实验中,动镜由一个线性振子驱动,其速率随时间改变。
如果时间间隔∆t足够小,也就是说在此时间间隔内动镜移动的距离可近似为υ t∆ ,则由(5.1)式算得的速率可近似为振子的瞬时速率。
本实验的时间间隔t∆ (即采样门宽)可调。
时刻t,门宽t∆ 以及接收器感受到的在t∆ 内移过的条纹数N随时在显示窗口内显示。
如图5.2所示,该实验装置由迈克耳逊干涉仪光学系统、线性振子及驱动、激光干涉测速仪及光电接收器(PIN)和防震台构成。
大学物理实验超声波速测量实验报告
大教物理真验超声波速丈量真验报告之阳早格格创做一真验脚段1.相识超声波的物理个性及其爆收体造;2.教会用相位法测超声波声速并教会用逐好法处理数据;3.丈量超声波正在介量中的吸支系数及反射里的反射系数;4.并使用超声波检测声场分散.5.教习超声波爆收战接支本理,6.教习用相位法战共振搞涉法丈量声音正在气氛中传播速度,并与公认值举止比较.7.瞅察战丈量声波的单缝搞涉战单缝衍射二真验条件HLD-SV-II型声速丈量概括真验仪,示波器,旗号爆收仪三真验本理1、超声波的有关物理知识声波是一种正在气体.液体、固体中传播的弹性波.声波按频次的下矮分为次声波(f<20Hz)、声波(20Hz≤f≤20kHz)、超声波(f>20kHz)战特超声波(f≥10MHz ),如下图.声波频谱分散图振荡源正在介量中可爆收如下形式的震荡波:横波:量面振荡目标战传播目标笔曲的波,它只可正在固体中传播.纵波:量面振荡目标战传播目标普遍的波,它能正在固体、液体、气体中的传播.表面波:当资料介量受到接变应力效率时,爆收沿介量表面传播的波,介量表面的量面搞椭圆的振荡,果此表面波只可正在固体中传播且随深度的减少衰减很快.板波:正在板薄与波少相称的弹性薄板中传播的波,可分为SH 波与兰姆波.超声波由于其波少短、频次下,故它有其特殊的个性:绕射局里小,目标性好,能定背传播;能量较下,脱透力强,正在传播历程中衰减很小,正在火中不妨比正在气氛或者固体中以更下的频次传的更近,而且正在液体里的衰减战吸支是比较矮的;能正在同量界里爆收反射、合射战波形变换.2、理念气体中的声速值声波正在理念气体中的传播可认为是绝热历程,果此传播速度可表示为μrRT=V (1)式中R 为气体普适常量(R=8.314J/(mol.k)),γ是气体的绝热指数(气体比定压热容与比定容热容之比),μ为分子量,T 为气体的热力教温度,若以摄氏温度t 估计,则:t T T +=0 K T 15.2730=代进式(1)得,000001V 1)(V T t T t T rRt T rR++⋅+===μμ (2)对付于气氛介量,0℃时的声速0V m /s .若共时思量到气氛中的蒸汽的效率,校准后声速公式为:s m pp T t w /)319.01)(1(45.331V 0++= (3) 式中w p 为蒸汽的分压强,p 为大气压强.3、共振搞涉法设有一从收射源收出的一定频次的仄里声波,通过气氛传播,到达接支器,如果接支里与收射里庄重仄止,进射波即正在接支里上笔曲反射,进射波与反射波相搞涉产死驻波,反射里处为位移的波节.改变接支器与收射源之间的距离l ,正在一系列特定的距离上,媒量中出现宁静的驻波共振局里.此时,l 等于半波少的整数倍,驻波的幅度达到极大;共时,正在接支里上的声压波背也相映天达到极大值.没有易瞅出,正在移动接支器的历程中,相邻二次达到共振所对付应的接支里之间的距离即为半波少.果此,若脆持频次 v 没有变,通过丈量相邻二次接支旗号达到极大值时接支里之间的距离(2/λ),便不妨用λv =V 估计声速.声压变更与接支器位子的关系:4、相位比较法收射波通过传声媒量到达接支器,所以正在共一时刻,收射处的波与接支处的波的相位分歧,其相位好 ϕ可利用示波器的李萨如图形去瞅察.ϕ 战角频次 ω、传播时间 t 之间犹如下关系:共时有:T /2πω=,V ,VT l t ==λ (式中T 为周期),代进上式可供得声速V .λ的决定用如下要领:根据当,...)3,2,1(2/==n n l λ时,得πϕn =.真验时,通过改变收射器与接支器之间的距离,可瞅察到相位的变更.而当相位好改变 π时,相映的距离l 的改变量即为半个波少.为透彻测定波少的值,正在本量的支配中要连绝测多个相位改变π的面的坐标,再用逐好法算出波少λ的值,根据波少战频次值可供出声速.止波法相位好图:5声速丈量及声波的单缝搞涉与单丝衍射由于超声波具备波少短,易于定背收射及抗搞扰等便宜,所以正在超声波段举止声速丈量是比较便当的.本真验用共振搞涉法战相位比较法丈量声音正在气氛中传播的声速;并钻研声波单缝搞涉,单缝衍射及声波的反射局里,将丈量截止与表里估计举止比较,进而对付动摇教的物理顺序战基础观念有更深的明白.6、声波的搞涉战衍射单缝搞涉真验拆置如图1所示.对付于分歧的α角,如果从单缝到接支器的程好是整或者波少的整数倍,便会爆收相少搞涉,果而瞅察到搞涉强度的极大值;当程好是半波少的偶数倍时,搞涉强度有极小值.果此,搞涉强度出现极大值与极小值的条件如下:极大值:λαn d =sin (4) 极小值:λα)21(sin +=n d (5) 式中,n 为整或者整数,d 为二个缝核心位子的距离,λ为声音的波少.图1衍射效力用超声波也不妨瞅察到,采与1个单缝,如图2所示.当去自单缝的一半的辐射与去自另一半的辐射出进半波少偶数倍时,会爆收相消搞涉,果此相消搞涉条件是:λα)21(sin 2+=n a (6) 式中,n =0,±1,±2,……,a 为单缝缝宽,α为接支器离核心位子转过角度.图2三、真验真量(一):声音正在气氛中传播速度丈量1、安排尝试系统的谐振频次按图4将真验拆置接好.正弦波的频次与40KHz,安排接支换能器尽大概近距离,且使示波器上的电源旗号为最大.而后,将二个换能器分启稍大些距离(约5-6cm),使接支换能器输进示波器上的电压旗号为最大.再安排频次,使该旗号真真为该位子极大值.此时旗号源输出频次才最后等于二个换能器的固有频次.正在该频次上,换能器输出较强的超声波.2、正在谐振频次处用共振法战相位法测声速.当测得一声速极大值后,连绝天移动接支端的位子,丈量相继出现20个极大值所相映的各接支里位子L,再用i逐好法供波少值.正在用相位比较法时,将接支器与示波器的Y轴贯串,收射器与示波器X轴贯串,即可利用李萨如图形去瞅察收射波与接支波的相位好,适合安排Y轴战X轴敏捷度,便能赢得比较谦意的李萨如图形.对付于二个共频次互相笔曲的简谐振荡的合成,随着二者之间相位好从0--π变更,其李萨如图形由斜率为正的曲线形成椭圆,再由椭圆变到斜率为背的曲线.记录游标卡尺上读数时,应采用李萨如图形为曲线时所对付应的位子.每移动半个波少,便会沉复出现斜率正背接替的曲线图形.3、本真验温度应透彻小心天丈量(为什么?),并测出温度计搞泡温度战干泡温度,查表得到该状态下的p值,w再测得真验室当时的气压值p,(搞燥天气可没有必丈量pw 战p)(详睹参照资料1战3),则可由式(3)供出声速值.4、将上述二种要领的丈量截止比较,估计相对付偏偏好.选搞真验:(安排性真验)(二)声波的单缝搞涉用图1所示单缝拆置去搞搞涉真验.真验须谦脚公式(4)战公式(5)条件.为了缩小由于二个缝处的衍射所引起的搀纯性.简朴的办法是每个缝宽度均小于1个波少(约8-9mm为一个波少),缝宽仅2-3mm,而二个缝相隔为几个波少,(本量使用单缝间距约为3倍波少).那时,丈量出主极大,次极大战极小值的位子.要瞅察更多极大值战极小值位子,须将牢固螺丝脱掉,搁好后.转化更大角度瞅察到.(三)声波的单缝衍射用图2所示单缝拆置去搞瞅察声波的单缝衍射真验(注意脱掉牢固螺丝必须保存好).体验声波衍射的物理含意.将转化紧固螺丝脱掉(注意螺丝战螺帽没有克没有及掉)搁正在纸盒内.将接支器绕轴心转化,不妨瞅察接支旗号正在分歧角位子时强度的变更,由公式(6)可估算一级极小值的角度.不妨正在谦脚公式(6)的条件下,瞅测到一级极小值.估算一下衍射是可与表里值普遍,转化更大角度时,可瞅测到一级极大值.四、使用注意事项1、仪器与拆置对接的电缆线,没有宜多拆、多接.角度牢固螺丝也没有宜让教死时常脱掉.最好规划是配一套公用“声速丈量概括真验仪”.让教死教习接拆共轴电缆接洽,以及瞅测大角度时单缝搞涉战单缝衍射,并备1个洪量角器.2、数隐游标卡尺使用时,应沉沉移动,移动时速度须缓而匀称.真验中断时,应将数隐部分电源关关.3、挪动变化仪器时,没有克没有及将数隐游标卡尺当脚柄使用.应二脚拿底板挪动变化拆置.4、通常,没有搞真验时,应用防尘罩(或者布)防尘,以预防灰尘加进换能器.五、思索与计划1、声波与光波、微波有何辨别?2、为何正在声波产死驻波时,正在波节位子声压最大,果而接支器输出旗号最大?3、正在什么条件下,声波传播中的压缩与稠密没有是绝热历程?那对付声速丈量截止有何效率?。
《传感器及检测技术》实验5 光纤传感器位移特性及测速实验

实验五光纤传感器位移特性及测速实验一、实验目的了解反射式光纤位移传感器的原理与应用。
了解光纤位移传感器用于测转速的方法。
二、实验仪器Y 型光纤传感器、测微头、反射面、差动放大器、电压放大器、数显电压表、频率/转速表、转动源、示波器、直流稳压电源。
三、实验原理反射式光纤位移传感器是一种传输型光纤传感器。
其原理如图5-1 所示, 光纤采用Y型结构, 两束光纤一端合并在一起组成光纤探头, 另一端分为两支, 分别作为光源光纤和接收光纤。
光从光源耦合到光源光纤, 通过光纤传输, 射向反射面, 再被反射到接收光纤, 最后由光电转换器接收, 转换器接收到的光源与反射体表面的性质及反射体到光纤探头距离有关。
当反射表面位置确定后, 接收到的反射光光强随光纤探头到反射体的距离的变化而变化。
显然, 当光纤探头紧贴反射面时, 接收器接收到的光强为零。
随着光纤探头离反射面距离的增加, 接收到的光强逐渐增加, 到达最大值点后又随两者的距离增加而减小。
反射式光纤位移传感器是一种非接触式测量, 具有探头小, 响应速度快, 测量线性化(在小位移范围内)等优点,可在小位移范围内进行高速位移检测。
图5-1 反射式光纤位移传感器原理图5-2 光纤位移传感器安装示意图在测速时, 需利用光纤位移传感器探头对旋转被测物反射光的明显变化产生电脉冲, 经电路处理即可测量转速。
四、实验内容与步骤(1)光纤传感器位移特性实验1. 光纤传感器的安装如图5-2 所示, 将Y 型光纤结合处安装在传感器固定支架上, 光纤分叉两端插入“光纤插座”中。
探头对准镀铬反射板(铁质材料圆盘), 固定在测微头上。
按图5-3接线, 电压放大器的输出接直流电压表。
2.将测微头起始位置调到10cm处, 手动使反射面与光纤探头端面紧密接触, 固定测微头。
3. 将“差动变压器”与“电压放大器”的增益调节旋钮调到中间位置。
打开直流电源开关。
4.将“电压放大器”输出端接到直流电压表(20V档), 仔细调节调零电位器使电压表显示为零。
《学生实验:测量速度》word教案

第四节学生实验:测量速度北京市顺义区第三中学杨小伏一、指导思想与理论依据教师以每天上学时学校门前的堵车情况引入,请学生思考:在这样的条件下你是选择走过堵车的路段,还是让家长开车把你送到学校门口?由此引出速度的测量,最后让学生测量骑自行车的速度,贴近学生生活,体现“从生活走向物理,从物理走向社会”的基本理念,使学生体验到生活中无处不在的物理知识,从而激发起学生学习的兴趣;注重让学生经历实验过程,学习科学知识和科学实验方法,提高分析问题及解决问题的能力。
二、教学背景分析1.教学内容分析测量物体运动的速度既是对前面所学速度知识的延伸,又是对长度、时间测量的复习巩固,还是学生接触的第一个间接测量实验。
这个实验既要求教师引导学生利用已学知识及测量工具寻找测量速度的原理及方法,让学生进行合作测出人步行的平均速度、小车在斜面上运动的平均速度,而且通过测量计算比较小车前半程与全程运动的快慢,认识到速度公式中路程、时间、速度的对应关系的重要性。
由于各组的实验数据不尽相同,教师应注意做好实验评估的教学,这样不仅仅为以后的间接测量实验做好方法上的铺垫,又使学生养成了评估实验的习惯,并培养学生改进完善实验方案的意识,养成实事求是的严谨作风。
2.学生情况分析学生已经学习了刻度尺和停表的使用、速度及平均速度的概念,并且会利用公式进行简单的计算。
本节课利用刻度尺和停表分别测出物体运动的路程和通过这段路程所用的时间,再根据速度的公式计算出物体运动的速度。
为了激发学生的兴趣,教学中安排了测量学生步行的速度、比较小车在斜面上运动时全程和前半程的速度,其中小车运行的路程与时间的对应关系是一个难点。
学生已经具备了交流实验结果的意识,但是还没有对实验进行评估的想法,也没有对实验方案进行改进的意识。
3.教学方式讲授、实验、讨论、评估。
4.教学手段利用多媒体创设情境、展示学生测量数据、分组实验。
5.教学准备停表、刻度尺、摩擦较小的小车、1 m长的平木板、垫木板的小木块。
光拍频法测量光的速度实验报告

. . . .. .. .嘉应学院物理学院近代物理实验实验报告实验工程:光拍频法测量光的速度实验地点:班级:姓名:座号:实验时间:年月日一、实验目的:1. 了解声光效应的应用。
2. 掌握光拍法测量光速的原理与方法。
二、实验仪器和用具:GSY ─IV 型光速测定仪,XJ17型通用示波器,E324型数字频率计等。
三、实验原理:根据振动振动迭加原理,两列速度一样,振面和传播方向一样,频差又较小的简谐波迭加形成拍。
假设有两列振幅一样〔只是为了简化讨论〕,角频率分别为1ω 和2ω 的简谐波沿χ方向传播。
)cos(1101ϕχω+-=k E E )cos(2202ϕχω+-=k E E 式中112λπ=k 、222λπ=k 称为波数,1ϕ和 2ϕ为初位相,这两列简谐波迭加后得21E E E +==⎥⎦⎤⎢⎣⎡++⎪⎭⎫ ⎝⎛-+•⎥⎦⎤⎢⎣⎡-+⎪⎭⎫ ⎝⎛--22cos 22cos 2212121210ϕϕωωϕϕωωc x t c x t E 式中可见,E 是以角频率为221ωω+,振幅为 ⎥⎦⎤⎢⎣⎡++⎪⎭⎫ ⎝⎛--22cos 221210ϕϕωωc x t E 的前进波。
注意到其振幅是以角频率221ωωω-=∆随时间作周期性缓慢变化,所以称E 为拍频波。
光拍信号的位相与空间位置有关。
处在不同空间位置的光电检测器,在同一时刻有不同位相的光电流输出。
假设空间两点A 、B(见图4—5)的光程差为 /χ∆,对应的光拍信号的位相差/ϕ∆,即 c f c /2///χπχωϕ∆⋅∆⋅=∆•∆=∆ (4—14)光拍信号的同位相诸点的位相差ϕ∆ 满足以下关系n c f c ⋅=∆⋅∆⋅=∆•∆=∆πχπχωϕ2/2/// (4—15)那么n f c //χ∆⋅∆= 式中,当取相邻两同位相点1=n ,χ∆恰好是同位相点的光程差,即光拍频波的波长λ∆。
从而有f c ∆=∆=∆/λχ或λ∆⋅∆=f c (4—16)因此,实验中只要测出光拍波的波长λ∆〔光程差χ∆ 〕和拍频f ∆〔f f 2=∆, f 为超声波频率〕,根据〔4-16〕式可求得光速c 值。
什么是车速实验报告
什么是车速实验报告1. 引言车速实验报告是对车辆在特定条件下行驶时的速度进行测量和分析的详细记录。
通过对车速的测定,可以了解车辆的行驶性能,为改进和优化车辆设计提供参考。
本实验报告旨在介绍车速实验的目的、原理、方法、结果和分析。
2. 目的车速实验的目的是确定车辆在不同路况和负载条件下的最大速度、加速性能以及高速行驶时的稳定性。
同时,通过实验测量和分析,可以评估车辆的操控性、经济性和安全性能。
3. 原理车速是车辆在单位时间内行驶的距离,通常以公里/小时(km/h)为单位。
车速的测量可以通过车辆上安装的速度传感器来实现。
速度传感器可以利用车轮上的转动来测量车辆的速度。
4. 方法4.1 实验设备和材料- 实验车辆- 速度传感器- 计时器- 测量工具(如千分尺、测量尺等)4.2 实验步骤1. 接通车辆的电源,确保所有仪表正常工作。
2. 校准速度传感器,以确保测量结果的准确性。
3. 在合适的路段选择合适的实验场地,确保路况安全。
4. 将速度传感器安装在车辆上,并与数据采集系统连接。
5. 开始车速实验,记录车辆在不同路段和负载条件下的速度数据。
6. 对实验结果进行统计和分析,计算平均速度、最大速度和加速时间等指标。
7. 结合实验数据和分析结果,评估车辆的行驶性能和安全性能。
5. 结果和分析根据车速实验的结果和分析,可以得到车辆在不同路况和负载条件下的最大速度、加速性能和稳定性。
通过对实验数据的统计和分析,可以评估车辆的操控性、经济性和安全性能,并为改进和优化车辆设计提供参考。
6. 结论车速实验是评估车辆性能和安全性的重要手段。
通过对车辆在不同路况和负载条件下的速度进行测量和分析,可以了解车辆的行驶性能、操控性和安全性能。
因此,车速实验报告对于改进和优化车辆设计具有重要意义。
参考文献- Smith, J. (2020). Vehicle Speed Measurement and Analysis. Journal of Automotive Engineering, 12(3), 345-358.- Johnson, R. et al. (2019). A Practical Guide for Vehicle Speed T esting. International Journal of Mechanical Engineering, 45(2), 78-93.。
旋转机械转速,角速度及转轴横向位移测量实验报告

旋转机械转速,角速度及转轴横向位移测量实验报告(文章一):振动位移转速在旋转机械中的测量振动位移转速在旋转机械中的测量(一)、振动位移的测量原理(1)、传感器原理机器的振动、位移总是伴随着机器的运转,即使是机器在最佳的运动状态,由于很微小的缺陷,也将产生某些振动。
在工作中我们常用的振动位移监测仪是由电涡流传感器、前置器、延伸电缆、监测仪转换器组成,其构成原理如图所示。
探头线圈接受前置器振荡电路来的高频电流,在其周围产生高频磁场,该磁场穿过靠近它的转轴金属表面,在其中产生一个电涡流,该电涡流产生的磁场方向和线圈磁场方向相反,改变了原线圈的感抗,该感抗的变化随探头顶部金属表面的间隙变化而变化。
前置器检测电路检测探头线圈的感抗变化。
再经放大电路将感抗变化量变换放大成相应电压变化信号输出。
经监测仪进行信号转换并显示,转换成4~20mA,1~5V的标准信号送入DCS或PLC中,在测量中,前置器放大输出的直流电压信号用做机械位移的测量,交流电压信号用做振动的测量。
(2)、机械量测量原理由于机械物体振动量的大小可以用振动的基本参量——位移、速度、加速度来表述。
对于简谐振动来说,用如下数学表达式来确定各参量之间的关系:X=XmSin(ωt+φ) 式中X——位移,即物体振动时相对于基准位置的位置变化(其最大的位置变化称为振幅,即式中的Xm,单位为μm);t——时间;ω——圆频率;φ——初始相角,根据上图的机械实际变化量,电涡流传感器能够真实地把它反映到输出电压变化上,并根据量值对振动进行指示。
如传感器特性为7.87V/mm,V峰-峰=78.7mv则此时振动值应为10μm,但在实际工作时我们用万用表测量的交流电压是有效值,必须进行换算,就有如下公式:振动值=交流毫伏值x2.828/7.87(此式在处理故障时非常实用)对实际测量产生的振动量,转换前进行计算,确定量值,比对转换器输出。
机械位移主要是指轴的轴向移动量,根据电涡流传感器的工作原理,感抗的变化随探头与顶部金属表面的间隙变化而变化,正是利用这点,我们对轴位移量进行测量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
重庆邮电大学综合实验报告
基于旋转编码器的转速测量实验
姓名:魏敏
学号: 2012213148
班级: 0881202
组号:
专业:电气工程与自动化
指导老师:陈俊华
自动化学院检测与控制实验中心
2014
一、实验目的
1. 了解编码器工作原理
2. 掌握编码器速度检测的方法;
二、实验原理
1. 编码器
编码式数字传感器是测量转轴角位移的最常用的检测元件,它具有很高的分辨率、测量精度和可靠性。
在一个圆形玻璃盘的边缘开有相等角距的缝隙,成为透明和不透明的码盘,在此码盘开缝的两边,分别安装光源及光电元件。
当码盘随被测物体的工作轴转动时,每转过一个缝隙,光电元件所获得的光强就发生一次明暗的转换,光电转换电路就产生一定幅值和功率的电脉冲输出信号。
将这一脉冲信号送加法计数器进行记数,则所计数码就等于码盘转过的缝隙数目,在缝隙之间的角度已知时,码盘(被测物体)所转过的角度也就确定了。
旋转编码器E6C2-CWZ6C参数表
编码参数
器
电源
电压
DC5V~24V
消耗
电流
70mA以下
分辨
率(脉冲/
旋转)
100、200、300、360、400、500、600、720、800、1000、
1024、1200、1500、1800、2000
输出
相
A 、B、Z相
输出
方式
NPN集电极开路输出
输出
容量
外加电压:DC30V以下;同步电流35mA以下;残留电压:
0.4V以下(同步电流35mA)
最高
响应频率
100kHz
2.测量方法:
2.1编码器鉴相电路设计:
2.3测量原理:
检测光电式旋转编码器与转速成正比的脉冲,然后计算转速,有三种数字测速方法:即M法、T法和M/T法。
光电式旋转编码器是转速或转角的检测元件,旋转编码器与电机相连,当电机转动时,带动码盘旋转,便发出转速或转角信号。
如图所示。
数字测速装置原理图
M
法测速
测取 Tc 时间内旋转编码器输出的脉冲个数
,用以计算这段时间内的平均转速,称作M法测速,如图所示。
M 法测速的分辨率: 电机的转速为 : r/min 601
c
ZT M n =
M 法测速的分辨率:c
c c ZT ZT M ZT M Q 60
60)1(6011=-+=
M 法测速误差率:
%1001
%10060 )
1(60 60%1111max ⨯=⨯-=M ZT M ZT M ZT M c
c c δ
M 法测速适用于高速段 T 法测速
记录编码器两个相邻输出脉冲的间的高频脉冲个数M2,f0为高频脉冲频率,如图所示。
T 测速法
电机转速
r/min 60602
ZM f ZT n t
==
T 法测速的分辨率:
)
1(6060)1(60220
2
020-=--=
M ZM f ZM f M Z f Q
T法测速误差率:
%10011%10060
60 )1(60%22
02
20max ⨯-=⨯-=M ZM f ZM f M Z f δ
T 法测速适用于低速段。
M/T 法测速
把M 法和T 法结合起来,既检测T C 时间内旋转编码器输出的脉冲个数M 1,又检测同一时间间隔的高频时钟脉冲个数M 2,用来计算转速,称作M/T 法测速。
采用M/T 法测速时,应保证高频时钟脉冲计数器与旋转编码器输出脉冲计数器同时开启与关闭以减小误差。
c
T M/T 法测速原理图
电机转速
r/min 60 602
11ZM f M ZT M n t ==
三、实验内容
1. 根据旋转编码器的工作原理,设计基于旋转编码器的速度检测原理图;
2. 利于实验室提供的单片机最小系统,设计位置检测、速度检测系统的应用电路;画出系统框图;
3. 编写相关程序, 实现对位置及转速的测量,并显示;
程序设计:
#include<reg51.h>
#define uchar unsigned char
#define uint unsigned int
sbit dula=P2^6; sbit wela=P2^7;
sbit q1=P3^4; bit bit_0;
uint count_N,count_N1;
uint count_n8;//计数值
uchar T_N=20;
void msplay(uchar,uchar);
void INT_0_Init();
void Timer0_Init();
void Motor_Init();
ucharcode
x1[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x27,0x7f,0x6f,0x40,0x7c,0x39,0x5e,0x3e,0x48};
uchar code x2[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};
void delay(uint z) //延时函数
{
uint x; for(x=z;x>0;x--) ;
}
void INT_0_Init()
{
IT0=1; EX0=1;
}
void Timer0_Init()
{
TMOD=0X01;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
EA=1; ET0=1; TR0=1;
}
void main()
{
uchar k6,k5,k4,k3,k2,k1,k0;
INT_0_Init(); Timer0_Init();
while(1)
{
k0=0x0e; k1=0x0f;
if(!q1) k6=0;
else k6=10;
if(!bit_0)
{
k2=count_N%10000/1000; k3=count_N%1000/100;
k4=count_N%100/10; k5=count_N%10; bit_0=1;
}
msplay(k0,0); msplay(k1,1); msplay(k6,3);
msplay(k2,4); msplay(k3,5); msplay(k4,6); msplay(k5,7);
}
}
void int_0() interrupt 0
{
count_n8++;
}
void timer0() interrupt 1
{
TR0=0; TH0=(65536-50000)/256;
TL0=(65536-50000)%256; T_N--;
if(0==T_N)
{
count_N1=count_n8; count_N=27.952*count_N1;
bit_0=0; count_n8=0;
T_N=20;
}
TR0=1;
}
void msplay(uchar y1,uchar y2)
{
P0= x1[y1];
if(y2==6) P0= P0|0x80;
dula=1; dula=0; delay(1);
P0= x2[y2];
wela=1; wela=0; delay(1);
P0= 0x00;
dula=1; dula=0; delay(1);
P0 = 0x0ff;
wela=1; wela=0; delay(1);
}
原理图设计:
四、总结
随着课程的推进,实验涉及的越来越多,对绘制原理图越来越得心应手,但由于编程涉及到对中断的应用,我仍不够熟练,在程序编写中遇到大大小小的问题,尽管通过不断地练习解决了这一问题,但在编码器旋转测速的显示部分,对误差的处理,还有一些问题,在后续的学习中,我将不断的完善自己在编程方面的不足,更加努力。
当然,通过此次旋转编码器的速度检测实验,我也学会如何根据编码器旋转原理进行速度检测。