用牛顿迭代法求解非线性方程组
牛顿法及基于牛顿算法下的Steffensen加速法求解非线性方程组方法例题及答案
1. 非线性方程组求解1.分别用牛顿法,及基于牛顿算法下的Steffensen 加速法。
(1) 求ln(sin )x x +的根。
初值0x 分别取0.1,1,1.5,2,4进行计算。
(2) 求sin =0x 的根。
初值0x 分别取1,1.4,1.6,1.8,3进行计算。
分析其中遇到的现象与问题。
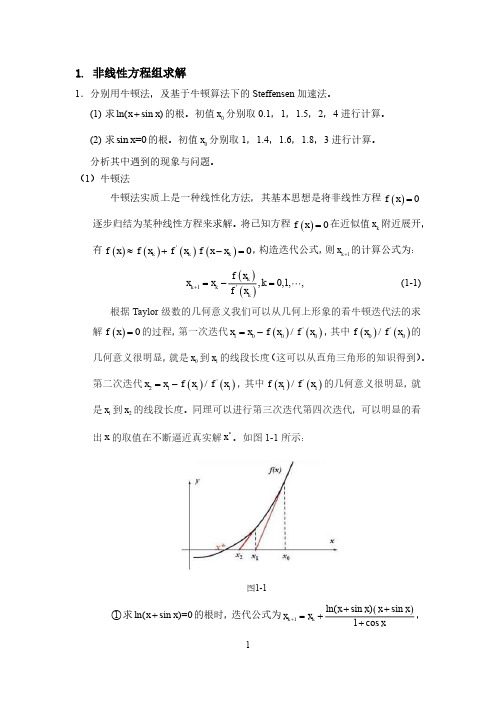
(1)牛顿法牛顿法实质上是一种线性化方法,其基本思想是将非线性方程()0f x =逐步归结为某种线性方程来求解。
将已知方程()0f x =在近似值k x 附近展开,有()()()()'0k k k f x f x f x f x x ≈+-=,构造迭代公式,则1k x +的计算公式为:()()1',0,1,,k k k k f x x x k f x +=-= (1-1)根据Taylor 级数的几何意义我们可以从几何上形象的看牛顿迭代法的求解()0f x =的过程,第一次迭代()()'1000/x x f x f x =-,其中()()'00/f x f x 的几何意义很明显,就是0x 到1x 的线段长度(这可以从直角三角形的知识得到)。
第二次迭代()()'2111/x x f x f x =-,其中()()'11/f x f x 的几何意义很明显,就是1x 到2x 的线段长度。
同理可以进行第三次迭代第四次迭代,可以明显的看出x 的取值在不断逼近真实解*x 。
如图1-1所示:图1-1○1求ln(sin )=0x x +的根时,迭代公式为()1ln(sin )sin 1cos k k x x x x x x x+++=++,0示。
计算结果见附录1表F.1-1所示。
初值取1.5,2,4进行计算时结果不收敛。
表 1-1 牛顿法计算结果○2求sin =0x 的根时,迭代公式为1cos k k x x x+=+,初值0x 分别取1、1.4、1.6、1.8、3计算时结果收敛,误差小于510-时,近似解如表1-2所示。
牛顿迭代法求解方程组
牛顿迭代法求解方程组一、牛顿迭代法的基本原理牛顿迭代法是一种用于求解方程的迭代方法,其基本思想是通过不断逼近方程的根来求解方程。
具体而言,对于一个方程f(x) = 0,我们可以选择一个初始近似解x0,然后通过迭代的方式不断更新x 的值,直到满足一定的停止准则为止。
牛顿迭代法的更新公式如下:x_{n+1} = x_n - \frac{f(x_n)}{f'(x_n)}其中,x_n表示第n次迭代得到的近似解,f(x_n)表示方程在x_n处的函数值,f'(x_n)表示方程在x_n处的导数值。
二、牛顿迭代法在求解方程组中的应用牛顿迭代法不仅可以用于求解单个方程,还可以推广到求解方程组的情况。
假设我们要求解一个由m个方程和n个未知数组成的方程组,即F(x) = 0其中,F(x) = (f1(x1, x2, ..., xn), f2(x1, x2, ..., xn), ..., fm(x1, x2, ..., xn))为方程组的向量函数。
我们可以将该方程组转化为一个等价的非线性方程组:f(x) = 0其中,f(x) = (f1(x1, x2, ..., xn), f2(x1, x2, ..., xn), ..., fm(x1, x2, ..., xn))。
牛顿迭代法在求解方程组时的更新公式如下:x_{n+1} = x_n - J^{-1}(x_n) f(x_n)其中,J(x_n)是方程组在x_n处的雅可比矩阵,其定义为:J(x_n) = \begin{pmatrix} \frac{\partial f_1}{\partial x_1}(x_n) & \frac{\partial f_1}{\partial x_2}(x_n) & \cdots & \frac{\partial f_1}{\partial x_n}(x_n) \\ \frac{\partial f_2}{\partial x_1}(x_n) & \frac{\partial f_2}{\partial x_2}(x_n) & \cdots & \frac{\partial f_2}{\partial x_n}(x_n) \\ \vdots & \vdots & \ddots & \vdots \\ \frac{\partial f_m}{\partial x_1}(x_n) & \frac{\partial f_m}{\partial x_2}(x_n) & \cdots & \frac{\partial f_m}{\partial x_n}(x_n) \end{pmatrix}三、牛顿迭代法的收敛性和收敛速度牛顿迭代法在求解方程组时具有较好的收敛性和收敛速度。
第7章非线性方程组的数值解法

f 1 y f 2 2 y
2 y ( 1,1 ) 2
( 1,1 )
( y 3) ( 1, 1 )
( 1, 1 )
( x 1) ( 1 , 1 ) 2
( 1,1 )
f 1 f 2 2 2[ 2 * ( 3) ( 2 ) * ( 2 )] 4 f1 f2 g10 x ( 1,1) x ( 1,1) x f 1 f 2 g 2 2[ 2 * ( 3) 2 * ( 2 )] 20 20 y y f 1 y f 2 ( 1, 1 ) ( 1, 1 )
完
f ( x0 h, y0 k ) f ( x0 , y0 ) ( h k ) f ( x0 , y0 ) x y 1 2 ( h k ) f ( x 0 , y0 ) 2! x y 1 n ( h k ) f ( x 0 , y0 ) n! x y 1 n 1 ( h k ) f ( x0 h, y0 k ) ( n 1)! x y
2
2
令
0
得 f 1 f 1 ( g10 x g 20 y ) f 1 ( g10 ( g f 1 g f 1 ) 2 ( g 10 20 10 x y f 2 g 20 x f 2 g 20 x f 2 ) f2 y f 2 2 ) ( x y
1
f 1 ( x 0 , y0 ) f ( x , y ) 2 0 0
从n到n+1的迭代格式为:
f 1 ( x n , y n ) xn 1 x n x y y f 2 ( xn , yn ) n 1 n x
牛顿迭代法的收敛性和稳定性
牛顿迭代法的收敛性和稳定性牛顿迭代法是一种高效的求解非线性方程组的方法。
它的基本思想是通过不断逼近目标函数的零点来求解方程,其中每次迭代通过求解目标函数的一阶导数和二阶导数来更新逼近值。
与其他求解非线性方程组的方法相比,牛顿迭代法具有更快的收敛速度和更高的精度。
然而,牛顿迭代法在实际应用中也存在一些问题,例如收敛性和稳定性。
本文将就牛顿迭代法的收敛性和稳定性进行探讨。
一、牛顿迭代法的收敛性牛顿迭代法的收敛性与初始迭代值的选择有关。
如果选择的初始迭代值与目标函数的零点较接近,则牛顿迭代法的收敛速度越快,精度越高。
反之,如果初始迭代值与目标函数的零点较远,则可能会导致收敛速度缓慢甚至无法收敛。
因此,通常使用牛顿迭代法进行求解时,需要通过试探法或其他方法寻找较接近目标函数零点的初始迭代值。
另外,牛顿迭代法的收敛性还与目标函数的性质有关。
具体来说,如果目标函数在初始迭代值处的二阶导数为正且在目标函数的零点处存在且连续,则牛顿迭代法一般会收敛到目标函数的零点。
而如果目标函数在某些点处的二阶导数为零或不存在,则可能会出现收敛速度缓慢或收敛不足的情况。
二、牛顿迭代法的稳定性牛顿迭代法的稳定性是指对于具有微小扰动的初始迭代值,迭代结果能否保持不变或只有微小的差异。
在实际应用中,由于存在数值误差或输入数据的不确定性,牛顿迭代法可能会受到微小扰动的影响而产生不稳定的结果。
因此,需要采取措施来提高牛顿迭代法的稳定性。
一种提高牛顿迭代法稳定性的方法是采用牛顿-拉夫逊迭代法。
牛顿-拉夫逊迭代法是在牛顿迭代法的基础上加入阻尼因子来实现的。
具体来说,牛顿-拉夫逊迭代法使用目标函数的一阶导数和二阶导数来更新逼近值,并在迭代过程中加入一个阻尼因子,使迭代结果在微小扰动下不会产生过大的变化。
此外,还可以采用增量式牛顿迭代法来提高牛顿迭代法的稳定性。
增量式牛顿迭代法是一种递推算法,它的基本思想是将目标函数的二阶导数逐步逼近到实际的值,并在每次迭代中只更新部分二阶导数,以减小更新过程中的数值误差。
求解非线性方程组的几种方法及程序实现

求解非线性方程组的几种方法及程序实现
求解非线性方程组一直是理论数学和应用数学研究的重点,并采用不同的方法得到准确的结果。
它们可以分为几种类型:
1. 用以绘图的方法解非线性方程组:该方法充分利用结合几何和数理的原理,给出非线性方程组的解,而不用对系数的解的表达式求解手段。
主要是利用可绘图的几何空间分析,它可以帮助理解问题本身,还可以很容易看出非线性方程组的解。
2. 用迭代法求解非线性方程组:这是一种常用的方法,它通过不断迭代收敛求解非线性方程组。
基本思想是通过构造一个迭代函数,其初始值和原始非线性方程组尽可能接近,然后不断迭代收敛求解非线性方程组。
3. 用强调法求解非线性方程系统:这是基于梯度的一种方法,它利用一个概念,即局部线性化,可以降低维数、转化为一个拐点,最后强化搜索全局解。
4. 用牛顿-拉夫逊方法求解非线性方程组:这是一种准确、快速的非线性方程组求解方法,主要利用牛顿迭代法搜索解的收敛性,加上一些拉夫逊的加速策略得到最终的结果。
5. 用幂法求解非线性方程组:幂法也称为指数序列,是一种重要的求解非线性方程组的方法,基本原理是利用指数的累加和误差的减少,从而最终得到非线性方程组的解。
6. 用逐步逼近法求解非线性方程组:逐步逼近法也称为分步变程法,是一种用于求解非线性方程组的简单方法,其基本思想是用不同的参数,在给定的范围内,逐步逼近目标解。
这些方法的程序实现略有不同,可以利用编程语言比如C、Fortran、Python等,编写程序完成求解。
可以采用函数求解、循环求解、行列式求解或者混合的算法等不同的方式实现,甚至可以用深度学习方法求解有些复杂的非线性方程组。
python高斯-牛顿迭代法 -回复
python高斯-牛顿迭代法-回复题目:Python高斯牛顿迭代法解析- 优化非线性问题摘要:高斯牛顿迭代法是一种用于求解非线性方程组的优化算法。
本文将介绍高斯牛顿迭代法的原理和使用Python实现的步骤。
我们将以一个简单的实例来说明算法的应用,并解释其背后的数学原理。
最后,我们将讨论高斯牛顿迭代法的优势和局限性。
引言:高斯牛顿迭代法是一种被广泛使用的数值优化算法,用于解决非线性问题。
不同于求解线性方程组的高斯消元法,高斯牛顿迭代法专门用于求解非线性问题。
它的应用领域涵盖了各个科学和工程领域,如计量经济学、计算机视觉和机器学习。
本文将详细介绍高斯牛顿迭代法的原理和实现步骤。
我们将以一个简单的实例来演示算法的工作原理,并对其数学背后的原理进行解析。
一、高斯牛顿迭代法原理高斯牛顿迭代法的目标是通过迭代的方式逼近方程组的根。
为了便于理解,我们以一个简单的二次曲线拟合问题为例。
假设我们有一组观测数据点(xi,yi),我们希望通过一个二次曲线y = a * x^2 + b * x + c来拟合这些数据。
我们的目标是找到最佳的参数a、b 和c,使得拟合曲线与观测数据点的差异最小。
为了达到这个目标,我们可以定义一个误差函数E(a,b,c)来衡量拟合曲线和观测数据点之间的差异。
常见的误差函数有平方和误差函数,即E(a,b,c) = Σ(yi - (a * xi^2 + b * xi + c))^2。
我们的目标是最小化误差函数,即找到使得E(a,b,c)最小的a、b和c。
高斯牛顿迭代法通过迭代的方式逼近最佳参数。
二、高斯牛顿迭代法步骤1. 初始化参数:初始化a、b和c的初始值。
2. 计算雅可比矩阵:雅可比矩阵是误差函数对参数的偏导数矩阵。
对于二次曲线拟合问题,雅可比矩阵J可以表示为:J = [∂E/∂a, ∂E/∂b, ∂E/∂c]3. 计算梯度向量:梯度向量是误差函数在当前参数值处的梯度,即导数。
梯度向量g可以表示为:g = [∂E/∂a, ∂E/∂b, ∂E/∂c]4. 计算海森矩阵:海森矩阵是误差函数对参数的二阶偏导数矩阵。
牛顿迭代法收敛条件

牛顿迭代法收敛条件牛顿迭代法是数值计算的一种重要的技术,是一种利用牛顿迭代法求解非线性方程组的有效方法。
牛顿迭代法的实现不仅要求计算出一个收敛的迭代结果,还要通过特定条件来证明这个收敛结果。
考虑到这项技术的重要性,它的收敛条件也受到了广泛的关注与研究。
一、牛顿迭代法收敛性的定义在计算机科学和应用中,牛顿迭代法是一种迭代方法,用于计算方程组的解,其中包括非线性方程组。
求解这类方程组的迭代计算不是在停止点处终止,而是要求迭代收敛的条件,这就是收敛性的定义。
收敛性是指在迭代计算过程中,特定的算法和条件下迭代序列必须向某个点收敛,而不是把它的值无限接近某一值,或者只在特定的时间段内能收敛,而不是收敛到特定点。
二、牛顿迭代法收敛性的判定牛顿迭代法收敛性的判定分为两种,一是函数收敛条件,二是牛顿迭代法本身的收敛条件。
1.函数收敛条件牛顿迭代法收敛的函数收敛条件要求函数在一定范围内的变化率不能无限逼近某个值,即认为一个函数在某一范围内的值收敛了,收敛的标准是函数在收敛范围内的变化率小于某一阈值。
2.牛顿迭代法本身的收敛条件牛顿迭代法本身的收敛条件就是给定一个序列,该序列必须在一定条件下收敛,这个条件是这些给定的序列必须严格满足强半正定矩阵上的平方和半正定矩阵性质,以及有足够多的解。
三、牛顿迭代法收敛性的应用1.牛顿迭代法在求解非线性方程的应用牛顿迭代法在计算机科学和应用中用于求解非线性方程组的解,其特点是快速收敛、算法简单、可以实现精确的解等。
当特定的非线性方程组的求解要求接近精确解时,利用牛顿迭代法可以获得满足收敛性要求的精确解。
2.牛顿迭代法在最优化问题中的应用牛顿迭代法也是用于解决最优化问题的一种有效方法,如求解最小化最大化目标函数,求解最优化问题的极小值或极大值等。
与传统最优化算法相比,牛顿迭代法具有计算快、收敛性强等优点,经常被用于解决最优化问题,从而获得较为精确的最优解。
3.牛顿迭代法在深度学习算法的应用牛顿迭代法在深度学习算法中也有重要的应用,例如误差反向传播算法(Error Back propagation, EBP)中就采用了牛顿迭代法。
5-非线性方程组的数值解法及最优化方法
1 4 0
非线性方程组的数值解法
x10=0; x20=0; k=0; while 1 k=k+1; x1k=(1+x20-0.1*exp(x10))/4; x2k=(x10-x10^2/8)/4; %雅克比迭代法 %x2k=(x1k-x1k^2/8)/4; %高斯-赛德尔迭代法 err1=abs(x1k-x10); err2=abs(x2k-x20); err=max(err1,err2); if err<=0.00000000005 break; end x10=x1k; x20=x2k; end
0.0000055305 0.0000001511 0.0000000041 0.0000000001
非线性方程组的数值解法
牛顿迭代法:根据求解非线性方程的牛顿迭代法,如果已经 k k T ,则 ,, xn 给出方程组 Fx 0 的一个近似根 xk x1k , x2 可把函数 Fx 的分量 fi x, i 1,2,, n 在 x k 处按多元函数泰 勒公式展开,取其线性部分做近似,得
(0.2325668498,0.0564514831) (0.2325670008,0.0564515487) (0.2325670050,0.0564515196) (0.2325670051,0.0564515197) (0.2325670051,0.0564515197)
0.0002023950
所以有
1 x φx 1 2 x1
0
T
取初值 x 代公式收敛。
T 0 x 0 , 0 附近 φx 1,所以迭 0,0 ,在
1 1 x 1 e 40 x2 2 1 1 x1 x2 4 16
解非线性方程组的牛顿法
考虑非线性方程组
f1(x1, x2, , xn ) 0,
f2(x1, x2, , xn ) 0,
fn (x1, x2, , xn ) 0. 利用向量记号写为
F (X ) O. 这里F (X )是定义在某区域D Rn上向量值函数. 若存在 X* D, 使得F (X*) O, 则称X*为非线性方程组的解.
.
逐次迭代得结果.
Step 5 Set x x y
Step 6 If y TOL then OUTPUT(x)
Step7 Set k k 1
STOP.
Step8 OUTPUT (‘Maximum number of iterations exceeded’) STOP.
为了说明上述算法,我们可以看看下面的例子。设
s1
145 272
,
145 272
T
.
x2 x1 s1 0.092,3.092 T .
显然,我们只经过两步计算,所得到的 x2就已经非常靠近 解 0,3T .
例1 用牛顿法求解方程组
k x (k) 0 (1.5, 1.0)T
f1( f2(
x1 x1
,x2 ,x2
) )
x1 2 x12
定理 2 设G : D Rn Rn在D内有一不动点X *且G在X *可导,
(G(X*)) 1, 则存在开球 S S( X*, ) D, 对X (0) S, 迭代序列{X (k)}
收敛于X *.
牛顿迭代公式:
X (k1) X (k) F( X (k) ) 1 F ( X (k) ),
其中
f1
F
(
X
(k
)
)
改进的牛顿迭代法求解非线性方程

改进的牛顿迭代法求解非线性方程史思总 西南科技大学摘要:将非线性方程线性化,以线性方程的解逐步逼近非线性方程的解,是牛顿迭代法的基本思想。
牛顿法具有收敛快、稳定性好、精度高等优点,是目前求解非线性方程的有效方法之一。
牛顿法每次迭代时都需要计算函数值和导数值,计算量较大,当导数值提供有困难时,牛顿法将不再适用于求解非线性方程组。
针对这种情况,提出了一种改进牛顿法——弦截法。
为避免求导,弦截法采用差商近似导数,以差商方式解决求导问题。
实践证明,弦切法优于大部分迭代法,仅次于牛顿法。
关键词:牛顿法、弦截法、非线性方程、差商一、牛顿法的迭代公式设)(x f 在其零点*x 附近一阶连续可微,且0)(≠'x f ,当0x 充分接近*x 时,由Taylor 公式有:))(()()(000x x x f x f x f -'+≈ (1)以方程0))(()(000=-'+x x x f x f (2)近似方程0)(=x f ,其解)()(0001x f x f x x '-= (3) 可作为方程的近似解,重复上述过程,得迭代公式),1,0(,)()(1 ='-=+n x f x f x x n n n n (4) 该方法称为牛顿迭代法。
牛顿法是一种不动点迭代法,其迭代函数为()()()f x x x f x ϕ=-' (5) 从几何上看,牛顿法是以曲线的切线与x 轴的交点作为曲线与x 轴的交点的近似。
故牛顿法也是一种切线法。
二、牛顿法的改进——弦截法为了避免牛顿法中计算导数,弦截法中采用差商代替导数。
避免了某些情况下由于不能求取导数值而迭代失效。
2.1差商的定义设有函数012(),,,,...f x x x x 为一系列互不相等的点,称()()()i j i j f x f x i j x x -≠-为()f x 关于,i j x x 的一阶差商(也称均差),记为[,]i j f x x ,即()()[,]i j i j i j f x f x f x x x x -=- (6)2.2弦截法在牛顿迭代公式(3)中,用差商()()i j i j f x f x x x --代替导数'()n f x 得到迭代公式111()()()(1,2,...)n n n n n n n f x f x x x x x n x x -+--=--=- (7) 按式(7)计算方程的近似解称为弦截法。
[新版]c++求解非线性方程组的牛顿顿迭代法
![[新版]c++求解非线性方程组的牛顿顿迭代法](https://img.taocdn.com/s3/m/3c86bf0f2379168884868762caaedd3383c4b527.png)
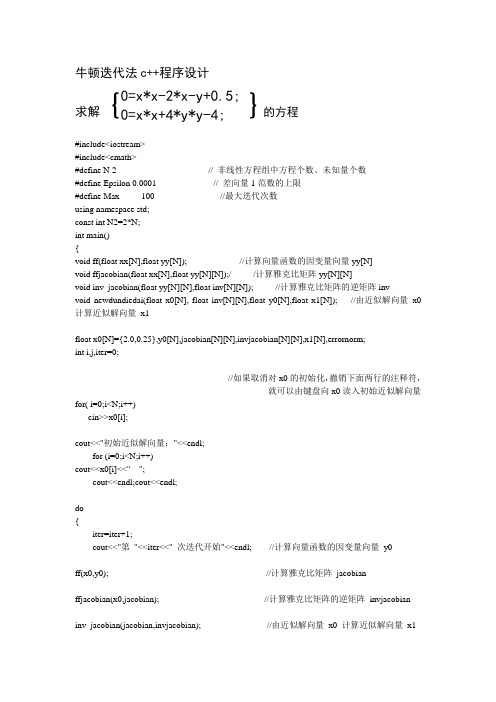
牛顿迭代法c++程序设计00000求解0=x*x-2*x-y+0.5; 0=x*x+4*y*y-4;的方程00000#include<iostream>00000#include<cmath>00000#define N 2 // 非线性方程组中方程个数、未知量个数000000#define Epsilon 0.0001 // 差向量1范数的上限00000#define Max 100 //最大迭代次数000000using namespace std;00000const int N2=2*N;00000int main()00000{00000void ff(float xx[N],float yy[N]); //计算向量函数的因变量向量yy[N]00000void ffjacobian(float xx[N],float yy[N][N]);/ /计算雅克比矩阵yy[N][N]00000void inv_jacobian(float yy[N][N],float inv[N][N]); //计算雅克比矩阵的逆矩阵i nv000 00void newdundiedai(float x0[N], float inv[N][N],float y0[N],float x1[N]); //由近似解向量x0计算近似解向量x100000float x0[N]={2.0,0.25},y0[N],jacobian[N][N],invjacobian[N][N],x1[N],errornorm;00000int i,j,iter=0;000000//如果取消对x0的初始化,撤销下面两行的注释符,就可以由键盘向x0读入初始近似解向量00000for( i=0;i<N;i++)00000cin>>x0[i];00000cout<<"初始近似解向量:"<<endl;00000for (i=0;i<N;i++)00000cout<<x0[i]<<" ";00000cout<<endl;cout<<endl;00000do00000{00000iter=iter+1;00000cout<<"第"<<iter<<" 次迭代开始"<<endl; //计算向量函数的因变量向量y0000 00ff(x0,y0); //计算雅克比矩阵jacobian00000ffjacobian(x0,jacobian); //计算雅克比矩阵的逆矩阵invjacobian 00000inv_jacobian(jacobian,invjacobian); //由近似解向量x0 计算近似解向量x1 00000newdundiedai(x0, invjacobian,y0,x1); //计算差向量的1范数errornorm000 00errornorm=0;000000for (i=0;i<N;i++)00000errornorm=errornorm+fabs(x1[i]-x0[i]);00000if (errornorm<Epsilon) break;00000for (i=0;i<N;i++)00000x0[i]=x1[i];00000} while (iter<Max);00000return 0;00000}00000void ff(float xx[N],float yy[N]) //调用函数00000{float x,y;00000int i;00000x=xx[0];00000y=xx[1];00000yy[0]=x*x-2*x-y+0.5; 00000yy[1]=x*x+4*y*y-4; //计算初值位置的值00000cout<<"向量函数的因变量向量是:"<<endl;00000for( i=0;i<N;i++)00000cout<<yy[i]<<" ";00000cout<<endl;00000cout<<endl;00000}00000void ffjacobian(float xx[N],float yy[N][N])000000{00000float x,y;000000int i,j;000000x=xx[0];00000y=xx[1];00000//jacobian have n*n element //计算函数雅克比的值00000yy[0][0]=2*x-2;00000yy[0][1]=-1;00000yy[1][0]=2*x;000000yy[1][1]=8*y;000000cout<<"雅克比矩阵是:"<<endl;00000for( i=0;i<N;i++)00000{for(j=0;j<N;j++)000000cout<<yy[i][j]<<" ";000000cout<<endl;00000}00000cout<<endl;00000}00000void inv_jacobian(float yy[N][N],float inv[N][N])00000{float aug[N][N2],L;00000int i,j,k;00000cout<<"开始计算雅克比矩阵的逆矩阵:"<<endl;00000for (i=0;i<N;i++)00000{ for(j=0;j<N;j++)000000aug[i][j]=yy[i][j];00000for(j=N;j<N2;j++)00000if(j==i+N) aug[i][j]=1;000000else aug[i][j]=0;00000}00000for (i=0;i<N;i++)00000{ for(j=0;j<N2;j++)000000cout<<aug[i][j]<<" ";00000cout<<endl;00000}00000cout<<endl;00000for (i=0;i<N;i++)00000{00000for (k=i+1;k<N;k++)000000{L=-aug[k][i]/aug[i][i];00000for(j=i;j<N2;j++)00000aug[k][j]=aug[k][j]+L*aug[i][j];000000 }00000}00000for (i=0;i<N;i++)00000{ for(j=0;j<N2;j++)000000cout<<aug[i][j]<<" ";00000cout<<endl;00000}00000cout<<endl; 00000for (i=N-1;i>0;i--)000000{ 00000for (k=i-1;k>=0;k--)000000{L=-aug[k][i]/aug[i][i];00000for(j=N2-1;j>=0;j--)00000aug[k][j]=aug[k][j]+L*aug[i][j];000000 }00000}00000for (i=0;i<N;i++)00000{ for(j=0;j<N2;j++)000000cout<<aug[i][j]<<" ";00000cout<<endl;00000}00000cout<<endl;00000for (i=N-1;i>=0;i--)000000for(j=N2-1;j>=0;j--)00000aug[i][j]=aug[i][j]/aug[i][i];00000for (i=0;i<N;i++)00000{ for(j=0;j<N2;j++)000000cout<<aug[i][j]<<" ";00000cout<<endl; 000000for(j=N;j<N2;j++)00000inv[i][j-N]=aug[i][j];000000}00000cout<<endl;00000cout<<"雅克比矩阵的逆矩阵:"<<endl;00000for (i=0;i<N;i++)00000{ for(j=0;j<N;j++)000000cout<<inv[i][j]<<" ";00000cout<<endl;00000}00000cout<<endl;00000}00000void newdundiedai(float x0[N], float inv[N][N],float y0[N],float x1[N])00000 {00000int i,j;000000float sum=0;00000for(i=0;i<N;i++)00000{ sum=0;00000for(j=0;j<N;j++)00000sum=sum+inv[i][j]*y0[j];00000x1[i]=x0[i]-sum;00000}00000cout<<"近似解向量:"<<endl;00000for (i=0;i<N;i++)00000cout<<x1[i]<<" ";00000cout<<endl;cout<<endl;00000。
牛顿拉夫逊迭代法,fortran

牛顿拉夫逊迭代法,fortran一、牛顿拉夫逊迭代法简介牛顿拉夫逊迭代法(Newton-Raphson method)是一种求解非线性方程或方程组的高效数值方法。
它的基本思想是通过迭代使得函数值逐步逼近零,从而得到方程的根。
该方法以其简单的迭代公式和较快的收敛速度而受到广泛关注。
二、牛顿拉夫逊迭代法的应用牛顿拉夫逊迭代法广泛应用于数学、物理、工程等领域,如求解非线性方程、非线性方程组、微分方程、线性方程组等。
在实际问题中,通常先设定一个初始值,然后通过迭代公式不断更新,直到结果满足精度要求。
三、FORTRAN编程实现牛顿拉夫逊迭代法FORTRAN(Formula Translation)是一种高级编程语言,主要用于数值计算和科学计算。
以下将以一个简单的非线性方程为例,介绍如何用FORTRAN实现牛顿拉夫逊迭代法。
设非线性方程为:f(x) = x^3 - 2x + 1,求解该方程的根。
四、代码实例与分析以下是用FORTRAN实现的牛顿拉夫逊迭代法求解该非线性方程的代码:```fortranprogram newton_raphsonimplicit noneinteger :: i, max_iterreal(8) :: x, x_new, f_old, f_new, tolreal(8), dimension(100) :: x_historymax_iter = 100tol = 1.0e-6x = 1.0x_history(1) = xdo i = 1, max_iterf_old = f(x)x_new = x - f_old / f"(x)f_new = f(x_new)if (abs(f_new) < tol) exitx = x_newx_history(i+1) = xend doprint *, "Root found at:", xdo i = 1, size(x_history)print *, "Iteration", i, ":", x_history(i)end doend program newton_raphson```分析:1.定义变量和参数:设置迭代次数最大值为100,误差容忍度为1.0e-6。
牛顿法解非线性方程组实验报告

由f i ( x) 偏导数作成的矩阵记为 J(x)或 F ' ( x) 称为 F(x)的 Jacobi 矩阵
设 x* 为 F(x)=0 的解,且设 x( k )
数f i ( x) 在 x( k ) 点的泰勒公式有
f i ( x)
1 2
j
J( x ) F ' ( x ) x1 x2
(2) 求解一个线性方程组: J( x( k ) )x( k ) F( x( k ) )
(3) 计算 x( k 1) x( k ) x( k ) 。 2、流程图见附图 1
4 程序代码及注释
%牛顿法解非线性方程组 function [Z,P,k,e] = newton(P,e0) %用P输入初始猜想矩阵,不断迭代输出计算解 %Z为迭代结束后的F矩阵 %k为迭代次数,e为每次迭代后的无穷范数,e0为误差限 Z=F(P(1),P(2)); J=JF(P(1),P(2)); Q=P-J\Z; e=norm((Q-P),inf); P=Q; Z=F(P(1),P(2)); k=1; while e>=e0
00要求10算法原理与流程图1算法原理设有非线性方程组称为fx的jacobi矩阵的第k1次近似解记为求解非线性方程组fx0牛顿法或为程序代码及注释牛顿法解非线性方程组functionnewtonpe0用p输入初始猜想矩阵不断迭代输出计算解z为迭代结束后的f矩阵k为迭代次数e为每次迭代后的无穷范数e0为误差限qpjz
xi gi ( x1, x2, , xn ) ,(i 1, 2, n)
或者简记为 x=g(x),其中 gi : Rn R, g : Rn Rn
g( x)
g1(
g2(
6.解非线性方程组的牛顿迭代法
eN TN (1 hL) eN 1
TN (1 hL) TN 1 (1 hL) eN 2
TN (1 hL) TN 1
(1 hL)2 TN 2 (1 hL)N 1 T1
N 1 k 0
(1
function f=myfun syms x; syms y f=[x^2+y^2-1;x^3-y]; x0=[0.8;0.6];
>> newton (myfun,x0,1e-6) n=
4 ans =
0.8260 0.5636
7. 最速下降法
f1( x, f2 (x,
y) y)
f1 y f2 y
y1
y0
1 J0
f1 f2
f1 f2 ( x0 , y0 ) f1x f2x
(**)
例: x 2 ( x
y2 5 0 1) y (3x
1)
0
求
(1,1) 附近的解
f1x
f2x
f1 y f2 y
2x y3
Tn1 y( xn1 ) yn1 一步产生的误差
其中是由公式根据前一步的准确值获得的。
y( xn1 ) y( xn h)
y( xn ) hf ( xn ,
y(xn ))
h2 2
y( )
xn xn!
yn1 y( xn ) hf (xn , y( xn )) (Euler方法)
f
(x,
y ( x))dx
python 多元 牛顿迭代法
python 多元牛顿迭代法多元牛顿迭代法是一种用于求解多变量非线性方程组的迭代算法。
它是牛顿迭代法在多元情况下的推广和扩展。
牛顿迭代法是一种求解非线性方程的常用方法,其基本思想是通过不断迭代逼近方程的根。
对于单变量情况,牛顿迭代法的迭代公式为x(k+1) = x(k) - f(x(k))/f'(x(k)),其中x(k)表示第k次迭代的近似解,f(x(k))表示方程在x(k)处的函数值,f'(x(k))表示方程在x(k)处的导数值。
在多元情况下,我们需要求解一个方程组,即找到一组变量的值,使得方程组中的每个方程都满足。
多元牛顿迭代法的关键是将单变量的迭代公式推广到多元情况下。
设我们要求解的方程组为F(x) = 0,其中F是一个向量值函数,x 是一个向量。
多元牛顿迭代法的迭代公式为x(k+1) = x(k) - J(x(k))^(-1) * F(x(k)),其中x(k)表示第k次迭代的近似解,J(x(k))表示方程组在x(k)处的雅可比矩阵,F(x(k))表示方程组在x(k)处的函数值向量。
多元牛顿迭代法的迭代过程如下:1. 初始化迭代参数x(0)。
2. 计算F(x(k))和J(x(k))的值。
3. 计算x(k+1) = x(k) - J(x(k))^(-1) * F(x(k))。
4. 判断迭代误差是否满足要求,如果满足则停止迭代,否则返回第2步。
需要注意的是,多元牛顿迭代法的收敛性和唯一性与初始值的选取有关。
如果初始值选取不当,可能会导致迭代过程发散或者陷入局部最优解。
为了提高多元牛顿迭代法的收敛速度,可以采用加速技术,如Broyden方法或DFP方法。
这些方法通过近似计算雅可比矩阵的逆矩阵或者近似计算步长,从而加快收敛速度。
多元牛顿迭代法在科学计算和工程实践中广泛应用。
它可以用于求解非线性方程组、优化问题、最小二乘拟合等。
在机器学习和人工智能领域,多元牛顿迭代法也被用于求解参数估计和模型训练的问题。
多重打靶牛顿迭代法
多重打靶牛顿迭代法数值计算是现代科学技术中不可或缺的一部分,而求解非线性方程组是数值计算中的重要问题之一。
在实际应用中,非线性方程组的求解往往是一个非常困难的问题,需要采用高效的算法来解决。
其中,多重打靶牛顿迭代法是一种常用的求解非线性方程组的方法。
多重打靶牛顿迭代法是一种基于牛顿迭代法的非线性方程组求解方法。
它的基本思想是将原问题转化为多个子问题,每个子问题都是一个单变量方程的求解问题。
然后,通过牛顿迭代法求解每个子问题,最终得到原问题的解。
多重打靶牛顿迭代法的具体步骤如下:1. 将原问题转化为多个子问题,每个子问题都是一个单变量方程的求解问题。
2. 对每个子问题应用牛顿迭代法求解。
3. 将每个子问题的解作为初始值,再次应用牛顿迭代法求解原问题。
4. 重复步骤3,直到收敛。
多重打靶牛顿迭代法的优点在于它可以将原问题分解为多个子问题,每个子问题都是一个单变量方程的求解问题。
这样,可以大大简化原问题的求解过程,提高求解效率。
此外,多重打靶牛顿迭代法还具有收敛速度快、精度高等优点。
在实际应用中,多重打靶牛顿迭代法被广泛应用于各种非线性方程组的求解问题。
例如,在计算机视觉领域中,多重打靶牛顿迭代法被用于求解图像配准问题;在机器学习领域中,多重打靶牛顿迭代法被用于求解最大似然估计问题等。
总之,多重打靶牛顿迭代法是一种高效、精确的非线性方程组求解方法。
它的优点在于可以将原问题分解为多个子问题,每个子问题都是一个单变量方程的求解问题。
这样,可以大大简化原问题的求解过程,提高求解效率。
在实际应用中,多重打靶牛顿迭代法被广泛应用于各种非线性方程组的求解问题。
(完整word版)c++求解非线性方程组的牛顿顿迭代法
void inv_jacobian(float yy[N][N],float inv[N][N])
{float aug[N][N2],L;
int i,j,k;
cout<<"开始计算雅克比矩阵的逆矩阵:"<<endl;
for (i=0;i<N;i++)
{ for(j=0;j<N;j++)
aug[i][j]=yy[i][j];
ff(x0,y0);//计算雅克比矩阵jacobian
ffjacobian(x0,jacobian);//计算雅克比矩阵的逆矩阵invjacobian
inv_jacobian(jacobian,invjacobian);//由近似解向量x0计算近似解向量x1
newdundiedai(x0, invjacobian,y0,x1);//计算差向量的1范数errornorm
yy[0][0]=2*x-2;
yy[0][1]=-1;
yy[1][0]=2*x;
yy[1][1]=8*y;
cout<<"雅克比矩阵是:"<<endl;
for( i=0;i<N;i++)
{for(j=0;j<N;j++)
cout<<yy[i][j]<<" ";
cout<<endl;
}
cout<<endl;
{ for(j=0;j<N2;j++)
cout<<aug[i][j]<<" ";