基于AVR单片机的两轮自平衡小车设计
基于单片机的智能两轮自平衡车的设计
TECHNOLLGY APPLICATION基于单片机的智能两轮自平衡车的设计■■沈阳工学院:赵一澎■■唱红■■夏靖坤■何金■刘莹1.■引言如今移动机器人面临的环境和任务越来越繁杂,在这种情况下,就需要移动机器人必须能够适应一些复杂的环境和危险的任务。
因此开展对两轮自平衡小车的研究,这项研究在该领域的科研水平具有很重要的现实意义。
1.1 两轮自平衡小车的研究意义在面临一些复杂环境和艰巨的任务时,移动机器人通常会碰到一些狭隘的危险工作,在面对这样如此艰难的环境,研究者们针对移动机器人如何灵活快捷的执行任务的问题进行了深度的研究。
正是在这样一个背景下两轮自平衡小车的概念被提出来。
两轮自平衡小车的优点在于可以适应复杂的环境和控制任务,可以保持车身的平衡,在安防或者军事上会有更广阔的应用前景。
1.2 两轮自平衡小车的技术1.2.1 数学建模建立系统的模型,建立的重点在于动力学方面,两轮自平衡小车的结构主要由车身和双轮子两部分构成。
对两轮自平衡小车的建模方法,采用经典的力学方法,对小车进行受力分析,可分为车轮模型和车身模型两部分,最后通过对两者的稳定型和能观性的分析判断出系统的最优状态方程。
1.2.2 姿态检测两轮自平衡小车通过检测小车的姿态来对小车进行控制。
加速度计和陀螺仪等惯性传感器可以实时、准确的检测两轮自平衡车的倾角。
因此,采用陀螺仪和加速度两个传感器相结合,通过融合的算法对于两轮自平衡小车来说是实现有效控制的关键所在。
1.2.3 控制算法控制技术是运动控制的核心,两轮自平衡车属于本质不稳定系统,利用传统的PID技术进行可行性分析,传感器将车体的运动速度和倾角等信息传递给系统控制器,是车轮转速与角度值保持一致,系统控制器将最终命令传递给电机驱动器来完成系统的闭环控制。
2.■系统概述两轮自平衡小车的组成很简单,保持小车平衡和运动都是通过控制两个车轮完成的。
在未对系统进行控制时,小车处于静止的状态,此时的车身的状态可能会出现前倾或后倾。
基于单片机的自平衡小车的设计与实现-本科毕业论文
广西师范大学漓江学院 2015 届本科生毕业论文(设计)
基于单片机的自平衡小车的设计与实现
专业:电子信息工程 学生姓名:何建安
内容摘要
学号:201113007619 指导老师姓名:丘森辉
本次设计的硬系统主要由供电电源模块、主控系统模块、直流电机驱动模块、 路面检测模块和液晶显示模块几个部分组成。供电电源是整个系统的支持者,它 给整个设计系统提供能量,使系统能够运转起来;主控系统是整个系统的控制者, 它指挥整个系统的运行,是整个系统的大脑;整个系统运行的动力是直流电机驱 动模块;路面检测模块则相当于整个系统的眼睛,它能够准确地检测的路面的情 况,并将路面的情况反馈给主控系统;液晶显示模块是将整个系统的运行情况显 示出来。
关键字: 80C51 单片机 光电外红反射循迹 金属探测器 电动小
2.3.1 车体的比较与选择...................................................................................... 5 2.3.2 控制系统的比较与选择.............................................................................. 6 2.3.3 电机驱动的比较与选择.............................................................................. 7 2.3.4 电源及稳压模块的比较与选择.................................................................. 7 2.3.5 调速模块的比较与选择.............................................................................. 7 2.3.6 显示与提示音的选择.................................................................................. 8 2.3.7 平衡槽的制作............................................................................................... 8 2.3.8 系统框图....................................................................................................... 9 2.3.9 最终方案..................................................................................................... 10 第三章 系统硬件设计........................................................................................................ 11 3.1 STC12C5A60S2 单片机硬件结构.......................................................................... 11 3.2 供电电源模块........................................................................................................ 12 3.3 电机驱动的设计................................................................................................... 12 3.4 路面检测模块设计................................................................................................ 14 3.5 测速模块................................................................................................................ 15 3.6 显示电路设计........................................................................................................ 15 3.7 寻迹原理................................................................................................................ 16 3.8 金属探测仪............................................................................................................ 17 第四章 软件设计................................................................................................................ 18 4.1 循迹功能软件设计................................................................................................ 18 4.2 金属探测功能软件设计....................................................................................... 18 4.3 LCD1602 液晶显示软件设计................................................................................ 18 4.4 主程序流程图....................................................................................................... 19 第五章 测试数据、测试结果分析及结论........................................................................ 20 5.1 测试数据................................................................................................................ 20 5.2 测试结果分析........................................................................................................ 21 第六章 设计总结................................................................................................................ 21 6.1 对设计的小结....................................................................................................... 21 6.2 设计收获体会....................................................................................................... 21 6.3 对设计的进一步完善提出意见或建................................................................... 22 致谢...................................................................................................................................... 22
基于两轮自平衡小车的测控系统课程设计教学改革

基于两轮自平衡小车的测控系统课程设计教学改革自平衡小车是一种能够实现在平衡状态下移动的机械设备,广泛应用于机器人技术、智能交通和无人驾驶等领域。
其控制系统主要包括传感器、控制算法和执行器等组成,并且涉及到多个学科的知识,如电路基础、信号处理、控制理论等。
在测控系统课程中进行自平衡小车的课程设计教学改革,可以提高学生的学习兴趣和实践动手能力,培养学生综合应用知识解决实际问题的能力。
针对自平衡小车的测控系统课程设计教学改革,可以通过引入实际应用案例和项目实践来激发学生的学习兴趣。
可以设计一个自平衡小车比赛,让学生分组进行设计和制作,比较各小组设计的小车的性能和稳定性,激发学生的竞争意识和团队合作能力。
可以设置一些实际应用场景,如自动巡航和自动避障,让学生将传感器和控制算法应用到实际问题中,提高他们解决实际问题的能力。
可以加强对于传感器和控制算法的教学和实践。
自平衡小车的传感器主要包括陀螺仪和加速度计,用来检测小车的倾斜角度和加速度,从而实现平衡控制。
在教学中,可以详细介绍传感器的原理和应用方式,并通过实验让学生亲自操作传感器并观察其输出结果,加深对传感器的理解。
对于控制算法,可以引入PID控制算法,并结合实验让学生调试参数,观察小车的响应。
通过这样的教学方法,可以帮助学生加深对传感器和控制算法的理解,并提高他们应用传感器和控制算法解决实际问题的能力。
可以引入先进的技术和设备,如无线通信和图像处理等,来进行拓展实践。
可以通过蓝牙或Wi-Fi通信模块,将小车与移动设备连接,实现远程控制和监控。
可以引入图像处理技术,通过摄像头检测道路情况或进行人脸识别等应用,使学生了解并实践最新的测控技术。
通过引入先进技术和设备的实践,可以激发学生的创新思维和实践能力,培养他们将测控系统应用到实际问题中的能力。
基于两轮自平衡小车的测控系统课程设计教学改革

基于两轮自平衡小车的测控系统课程设计教学改革1. 引言1.1 研究背景两轮自平衡小车是一种具有自主平衡能力的智能移动机器人,具有在不借助外部支撑的情况下保持平衡的能力。
随着人工智能和机器人技术的不断发展,两轮自平衡小车在教育领域中的应用日益广泛。
传统的测控系统课程设计通常注重理论知识的传授,缺乏实际操作和动手能力的培养,因此需要进行教学改革,以适应现代教育的发展需求。
在当前高等教育中,教学模式的转变是必然的趋势,传统的课堂讲授已不能满足学生的学习需求,因此需要将课程设计与实践相结合,培养学生的实际动手能力和创新思维。
基于两轮自平衡小车的测控系统课程设计教学改革正是针对这一需求而展开的重要举措。
通过引入实际操作环节,学生可以在课堂上亲自动手操控两轮自平衡小车,深入理解测控系统的原理和应用,提高他们的实际操作能力和问题解决能力。
这一教学改革将有助于激发学生的学习兴趣,培养他们的创新精神和团队合作意识,促进他们在未来的工程实践中发挥更大的作用。
1.2 问题陈述在传统的测控系统课程设计教学中,学生往往面临着难以真正理解理论知识、缺乏实践能力、缺乏创新思维等问题。
尤其是对于基于两轮自平衡小车的测控系统课程设计,学生需要掌握的知识和技能更加复杂和抽象,传统的教学方法已经不能完全满足学生的需求。
问题陈述部分主要关注的是如何有效解决传统测控系统课程设计教学中存在的种种问题。
具体来说,包括如何提高学生对测控系统理论知识的理解和应用能力,如何培养学生的实践操作技能和创新思维,如何激发学生学习的兴趣和潜能等方面的问题。
通过解决这些问题,可以提高学生的学习效果和实践能力,为他们未来的科研和工作奠定坚实的基础。
本课程设计的教学改革旨在通过创新教学内容和方法,优化实践教学环节设计,改进实验室建设,进行课程效果评估等措施,有效解决传统测控系统课程设计教学中存在的问题,提高学生的学习效果和实践能力,为培养具有创新精神和实践能力的测控领域专业人才做出积极贡献。
两轮自平衡小车设计方案

工程科技与产业发展科技经济导刊 2016.22期两轮自平衡小车设计方案孟庆宇 祝 玲 李 鑫 殷志平(北方民族大学 宁夏 银川 750021)1绪论自平衡控制系统一直是当今研究的主流,应用之处也包括了很多方面。
载人平衡车便是现在新兴的一种产物。
自平衡车分类大致分为三类:独轮平衡车、左右双轮平衡车以及前后双轮平衡车。
而左右双轮平衡车因其操作简单当之无愧成为了一种新的趋势。
载人平衡车是一种体感操作代步车,主要原理是通过采集车体倾斜来控制电机转速来保持平衡。
以下便介绍左右双轮平衡车。
2整体设计平衡车整体设计包括几大部分,其中机械部分有两种:第一种是无操作杆,完全由身体重心来操作。
第二种是加入操作杆,通过身体重心变化来控制前进后退,操作杆操作左右转向。
而第二种稳定性明显优于前一种,因此采用操作杆一种。
在芯片选型方面,有几种选择,其中包括AVR单片机,COTEX M3内核的stm32单片机,COTEX M4内核的K60单片机,这几款控制芯片各有优缺点。
在保证稳定性及预算前提下,stm32完全能够胜任。
在软件代码部分,平衡车控制同样采用了多种算法结合的方式来保证系统的鲁棒性以及可靠性。
3主要硬件部分3.1微控制器微控制器是整个平衡车系统的核心,因此在选型方面有着严格的标准。
在保证系统可执行的前提下,推荐三种可用芯片:第一种是AVR单片机,这款微处理器可靠性高,处理速度快,并且拓展了多个PWM输出口,但其常用于仪表控制和仿生机器人肢体控制上;第二种是COTEX M4内核的freescale k60单片机,这种单片机拓展了多种外设,并且集成多个中断控制器,处理速度更快,缺点是该款芯片定价比较高;第三种也是最常用的一种便是stm32单片机,本款芯片是基于COTEX M3内核的微处理器,其性能较之k60并没有太大差距,而且价格较低,因此作为最优选择。
3.2角度传感器角度传感器对于平衡控制来说,同样是至关重要的一环。
基于AVR单片机的智能小车的设计与制作

基于AVR单片机的智能小车的设计与制作O 引言自工业革命以来,随着电气的发展,人类进入了文明的新阶段。
机器人已经广泛用于工业、农业、服务业、军事、机械、交通、航天航空等领域。
智能机器人水平的不断提高,大大提高了劳动效率,减轻了劳动强度。
机器人与人类并肩作战,在征服自然,改造自然地过程中发挥着重要作用。
智能小车是集理论力学、机械结构、数字电路、模拟电路、传感器、单片机、控制理论和算法等多门学科为一体的综合系统,其内容涵盖机械、电子、自动控制原理、计算机、传感技术等多个学科和领域。
本文设计的基于ATmagel6L 的智能小车就是要求其从起跑线出发,然后通过自身自动调整向角和车速,使其自动沿着一条黑色引导线行驶。
1 智能小车的硬件设计方案本智能小车控制系统的结构如图1 所示。
其中的Atmegal6L 单片机是智能小车的控制模块,它是高性能、低功耗的8 位AVR 微处理器,采用先进的RISC 结构,具有16K 字节的系统内可编程Flash 和512 字节的EEPROM。
工作于16 MHz 时,其性能高达16 MIPS,并具有32 个可编程通用I/0 口和用于边界扫描的JTAG 接口,基本都能够满足设计要求。
电路稳压模块输入12 V 电压。
经过稳压电路后可得到9 V、5 V 两种电压,其中9 V 电压用于电机驱动模块的工作电压,5 V 电压则用于单片机的工作。
图2 所示是RPR220 光电传感模块的电路图,光电传感是由10 个RPR220 型光电对管组成。
RPR220 是一种一体化反射型光电探测器,其发射器是一个砷化镓红外发光二极管,而接收器则是一个高灵敏度的硅平面光电三极管。
L298N 的INPUT、OUTPUT 两端口用于提供稳定的电压以使电机转动。
1.1 光电传感模块图2 所示是本系统中光电传感模块的电路图。
寻线路径一般是刻在白色平面上的3 cm 的黑线,小车沿着黑线循径,当检测到白线,即二极管发出的光被白线反射回来时,光电对管中的三极管导通,比较器6 号端口输入为低电平,经过比较器后,7 号端口输出为高电平。
基于两轮自平衡小车的测控系统课程设计教学改革
基于两轮自平衡小车的测控系统课程设计教学改革随着科技的快速发展,智能设备已经成为我们生活中不可或缺的一部分。
而在这一趋势下,基于两轮自平衡小车的测控系统也成为了不少工程技术领域的研究重点。
对于这个领域的学生,他们需要掌握相关的测控系统设计和开发技能。
在传统的课程设计中,很难给予学生足够的实际操作机会和项目实践经验,这也制约了学生们的实际能力提升。
为了解决这一问题,需要对测控系统课程设计进行教学改革,提供更多的实践机会和项目实践经验,来培养学生们的实际操作能力和创新实践能力。
我们可以对课程的教学内容做出调整,增加基于两轮自平衡小车的测控系统设计和开发实践内容。
在这个过程中,我们可以教授学生相关的控制理论、传感器应用、嵌入式系统开发等知识,然后让学生们动手实践,设计和开发基于两轮自平衡小车的测控系统。
通过这样的方式,学生们既可以学习理论知识,又可以在实践中掌握相关的技能,提升他们的实际操作能力和创新实践能力。
我们可以引入项目式教学模式,让学生在实际项目中进行测控系统设计和开发。
通过与工程实践项目结合,学生可以在实际项目的背景下学习相关的知识和技能,理论联系实际,加深对知识的理解和掌握。
学生们在实际项目中还可以接触到一系列的问题和挑战,这有利于培养他们的解决问题和创新能力,提升他们的综合素质。
我们还可以加强实验室教学,提供更多的实验设备和资源,让学生们有更多的机会进行实际操作。
在实验教学中,学生可以通过实际操作来巩固课堂知识,更深入地理解和掌握相关的技能。
实验教学还可以培养学生的实验设计和分析能力,提升他们在实验中获得数据、分析数据和得出结论的能力,从而培养他们的科研能力和创新实践能力。
基于两轮自平衡小车的测控系统课程设计教学改革旨在提供更多的实践机会和项目实践经验,来培养学生们的实际操作能力和创新实践能力。
通过调整教学内容、引入项目式教学模式、加强实验室教学等手段,可以更好地满足学生的需求,提升其实际能力,为其未来的发展打下坚实的基础。
两轮自平衡小车毕业设计
两轮自平衡小车毕业设计毕业设计题目:两轮自平衡小车设计一、毕业设计背景与意义目前,智能机器人技术已经在各个领域得到广泛的应用,其中自平衡小车是一种非常具有代表性的机器人。
自平衡小车能够通过自身的控制系统来保持平衡姿态,并能够实现各种转向和动作。
因此,自平衡小车不仅能够广泛应用于工业生产中,还可以成为搬运、巡逻和助力等领域的优秀协助工具。
本毕业设计的目标是设计和实现一种能够自动控制、实现平衡的两轮自平衡小车。
通过这个设计,进一步探究并研究自平衡技术的原理及应用,增加对机器人控制系统和传感器的理解,提高对计算机控制和嵌入式系统的应用能力。
二、毕业设计的主要内容和任务1.研究和调研a)研究两轮自平衡小车的构造和原理;b)调研目前市场上相关产品,并分析其特点和存在的问题。
2.模块设计a)根据研究结果,设计自平衡小车的主要模块,包括平衡控制模块、动作控制模块和传感器模块;b)设计相关控制算法和策略,使小车能够保持平衡并能够实现转向和动作。
3.硬件搭建和调试a)根据模块设计的结果,搭建小车的硬件系统,包括选择适用的电机、陀螺仪、加速度计等;b)进行相应的调试和优化,保证小车的平衡和动作控制能力。
4.软件开发和系统集成a)开发小车的控制系统软件,包括实时控制系统和传感器数据处理等;b)将硬件系统和软件系统进行有机地集成,实现小车的平衡和动作控制。
5.实验和测试a)进行实验测试,验证设计的有效性和稳定性;b)进行相关的性能测试和比较研究。
三、设计预期成果1.自平衡小车的系统设计和实现,能够平衡姿态并能够实现转向和动作控制;2.控制系统软件的开发和优化,实现小车的实时控制和数据处理;3.相关模块和算法的设计和实现,如平衡控制模块和动作控制模块;4.实验和测试结果的总结和分析;5.毕业设计报告的撰写。
四、设计周期和工作安排1.阶段1:研究和调研阶段(1周)2.阶段2:模块设计阶段(2周)3.阶段3:硬件搭建和调试阶段(2周)4.阶段4:软件开发和系统集成阶段(2周)5.阶段5:实验和测试阶段(1周)6.阶段6:总结和报告撰写阶段(2周)五、预期解决的关键问题和技术难点1.小车平衡控制算法的设计和优化;2.小车动作控制算法的设计和优化;3.小车硬件系统与软件系统的有效集成;4.多个传感器数据的处理和融合。
基于单片机的两轮自动平衡小车设计

上
6 11 enableA
enableA
vVcCcC6I l 4. V Vs s s
D D8 D。 Dl{1
VCC 6
T
o UT C 0 U TC 0 U TB 0 U T
.......LI
in4007
上
L298N
VC C6
'
D2 D3 D |D
参 考 文
P13 一
5K
P23
D6
5 IN 1 0 U T1 2
P22
7 IN 2 0 U T2 3
P21
10 1N 3 o U T3 13
P20 只2
代
l
J
12 IN 4 o U T4 14
1 senseA
应用技一
是将 控制 直立 和方 向 的控制 信号 叠加 在一起 加 载 电 机上 .只要 电机处 于线 性状 态就 可 以同 时完成 上面 两个 任务 。速 度是 通过 调节 车模倾 角 来完 成 的 ,不 同的倾角 会 引起小 车 的加减 速 。从 而达 到对 于速度 的控制。两轮 自平衡小车的系统方程式如下 :
图 3 陀 螺 仪 电 路接 口图
3.2 加速度传感器 电路设计 MMA736 1是三 轴小 量程 的加速 传感 器 ,用 于检
测 物件 运 动 和方 向 .它 根 据 物件 运 动 和方 向改变 输 出信号 的电压值 。三轴 的信号在不运动或不被重力 作用的状态下 ,其输 出电压为 1.65 V。如果 沿着某 一 个方 向活 动 ,或 者受 到 重力 作 用 ,输 出 电压就 会 根 据其 运 动方 向 以及 设 定 的传 感 器 灵敏 度 而 输 出相 应的电压值 。采用单片机的片内 A/D转换器就可 以 检 测其 运 动 方 向 。但 是 小 车 运动 所 产 生 的加 速度 会 产生很大的干扰信号叠加在上述测量信号上 ,使得 输 出信号无法准确反映车模的倾角 ,因此 ,采用加 角速度传感 器和陀螺可使小车的直立控制取得 良好 的效果 (见 第 92页 图 4)。 3.3 电机驱 动 电路 的设计
基于两轮自平衡小车的测控系统课程设计教学改革

基于两轮自平衡小车的测控系统课程设计教学改革随着科技的发展和应用,自平衡小车已经成为一种非常流行的电子产品。
它具有自动平衡功能,能够保持在直立的状态,同时还可以通过电子控制系统来实现前进、后退、转向等操作。
基于两轮自平衡小车的测控系统课程设计教学改革成为当下教育领域的一大热门话题。
本文将对此进行探讨和分析。
一、课程设计教学改革的背景和意义随着信息技术的飞速发展,测控系统已经成为电子工程领域的重要组成部分。
而基于两轮自平衡小车的测控系统设计课程则是电子工程专业的重要课程之一。
传统的课程设计教学方法通常是以理论知识为主,很少涉及到实际操作和应用。
在当今社会,实际操作能力和实践应用能力已经成为人才培养的重要方面。
为了更好地满足社会需求和学生的学习需求,有必要对基于两轮自平衡小车的测控系统课程设计教学进行改革。
在进行课程设计教学改革的过程中,我们需要关注以下几个方面的问题:如何调整课程内容。
传统的课程设计教学通常注重理论知识的讲解,但缺乏实际操作和应用。
我们需要调整课程内容,将实际操作和应用纳入课程设计中,使学生能够在实践中真正理解和掌握所学知识。
如何改进教学方法。
传统的教学方法通常是讲授为主,实践操作为辅。
基于两轮自平衡小车的测控系统设计课程需要强调实践操作和应用能力的培养。
我们需要改进教学方法,引入项目式教学、实践教学等新的教学方法,以提高学生的实践操作能力。
如何增加课程的实用性。
传统的课程设计通常是为了考试而设计,缺乏实际应用价值。
基于两轮自平衡小车的测控系统设计课程需要具有一定的实际应用价值。
我们需要增加课程的实用性,引入一些实际项目,并与企业、社会进行合作,以培养学生的实际操作和应用能力。
二、改革目标和路径基于以上问题的分析,我们可以确定该课程设计教学改革的目标为:培养学生的实际操作和应用能力,提高学生的创新能力和实践能力,增强学生的综合素质和竞争力。
实现这一目标需要走一条符合课程特点和学生需求的改革路径。
基于两轮自平衡小车的测控系统课程设计教学改革

基于两轮自平衡小车的测控系统课程设计教学改革随着科技的发展,自平衡小车已经成为了一种颇受欢迎的新型交通工具。
它不仅在生活中提供了便利,同时也在教学领域中得到了广泛的应用。
针对基于两轮自平衡小车的测控系统课程设计教学,本文将着重探讨教学改革的必要性,以及改革的具体步骤和效果。
我们来聊一聊为什么需要对基于两轮自平衡小车的测控系统课程设计进行教学改革。
传统的测控系统课程设计往往只注重理论知识的传授,而忽略了实际应用能力的培养。
学生们缺乏对于理论知识的实际运用能力,导致他们在工程领域的实际操作中遇到了困难。
而基于两轮自平衡小车的测控系统课程设计,可以很好地结合理论与实践,培养学生的工程实践能力。
对于这一点,我们可以从学生的就业现状来看,很多企业对于学生的技术实践能力有着较高的要求。
我们有必要对于基于两轮自平衡小车的测控系统课程设计进行教学改革,以提高学生的实践能力,增强他们的就业竞争力。
接下来,我们来讨论一下基于两轮自平衡小车的测控系统课程设计教学改革的具体步骤。
我们需要加强对自平衡小车原理的教学。
自平衡小车的原理和结构是该课程设计的基础,学生们必须对这方面有着深入的了解。
我们需要通过直观的实物展示和数字模拟等多种方式,引导学生理解自平衡小车的原理。
我们需要增加对测控系统设计的实际案例分析。
学生们通过分析实际的案例,可以更好地理解测控系统设计的各个环节,加深对知识的理解。
我们需要注重实践操作环节的设计。
通过实际操作,学生们可以更加深入地理解课程设计内容,提高他们的工程实践能力。
通过以上的步骤设计,可以更好地激发学生的学习兴趣,提高他们的学习效果。
基于两轮自平衡小车的测控系统课程设计教学改革是非常有必要的。
通过加强自平衡小车原理的教学,增加实际案例分析,注重实践操作的设计,可以更好地提高学生的学习效果,增强他们的工程实践能力,提高他们的就业竞争力。
我们有必要对该课程设计进行教学改革,为学生们创造更好的学习环境,提高他们的学习效果。
基于单片机的两轮自平衡车控制系统设计

基于单片机的两轮自平衡车控制系统设计文件排版存档编号:[UYTR-OUPT28-KBNTL98-UYNN208]基于单片机的两轮自平衡车控制系统设计摘要两轮自平衡车是一种高度不稳定的两轮机器人,就像传统的倒立摆一样,本质不稳定是两轮小车的特性,必须施加有效的控制手段才能使其稳定。
本文提出了一种两轮自平衡小车的设计方案,采用重力加速度陀螺仪传感器MPU-6050检测小车姿态,使用互补滤波完成陀螺仪数据与加速度计数据的数据融合。
系统选用STC公司的8位单片机STC12C5A60S2为主控制器,根据从传感器中获取的数据,经过PID算法处理后,输出控制信号至电机驱动芯片TB6612FNG,以控制小车的两个电机,来使小车保持平衡状态。
整个系统制作完成后,小车可以在无人干预的条件下实现自主平衡,并且在引入适量干扰的情况下小车能够自主调整并迅速恢复至稳定状态。
通过蓝牙,还可以控制小车前进,后退,左右转。
关键词:两轮自平衡小车加速度计陀螺仪数据融合滤波 PID算法Design of Control System of Two-Wheel Self-Balance Vehicle based onMicrocontrollerAbstractTwo-wheel self-balance vehicle is a kind of highly unstable two-wheel robot. The characteristic of two-wheel vehicle is the nature of the instability as traditional inverted pendulum, and effective control must be exerted if we need to make it stable. This paper presents a design scheme of two-wheel self-balance vehicle. We need using gravityaccelerometer gyroscope sensor MPU6050 for the inclination angle of vehicle, and using complementary filter for the data fusion of gyroscope and accelerometer. We choose an 8-bit microcontroller named STC12C5A60S2 from STC Company as main controller of the control system. The main controller output control signal, which is based on the data from the sensors, to the motor drive chip named TB6612FNG forcontrolling two motors of vehicle, and keeping the vehicle in balance. After the completion of the control system, the vehicle can achieve autonomous balance under the conditions of unmanned intervention, the vehicle can adjust automatically and restored to a stable statequickly in the case of giving appropriate interference as well. In addition, we can control the vehicle forward, backward and turn around. Key words: Two-Wheel Self-Balance Vehicle; Accelerometer; Gyroscope; Data fusion;Complementary filter; PID algorithm1 绪论自平衡小车的研究背景近几年来,随着电子技术的发展与进步,移动机器人的研究不断深入,成为目前机器人研究领域的一个重要组成部分,并且其应用领域日益广泛,其所需适应的环境和执行的任务也更复杂,这就对移动机器人提出了更高的要求。
毕业设计(论文)--基于单片机的两轮自平衡车控制系统设计

基于单片机的两轮自平衡车控制系统设计摘要两轮自平衡车是一种高度不稳定的两轮机器人,就像传统的倒立摆一样,本质不稳定是两轮小车的特性,必须施加有效的控制手段才能使其稳定。
本文提出了一种两轮自平衡小车的设计方案,采用重力加速度陀螺仪传感器MPU-6050检测小车姿态,使用互补滤波完成陀螺仪数据与加速度计数据的数据融合。
系统选用STC公司的8位单片机STC12C5A60S2为主控制器,根据从传感器中获取的数据,经过PID算法处理后,输出控制信号至电机驱动芯片TB6612FNG,以控制小车的两个电机,来使小车保持平衡状态。
整个系统制作完成后,小车可以在无人干预的条件下实现自主平衡,并且在引入适量干扰的情况下小车能够自主调整并迅速恢复至稳定状态。
通过蓝牙,还可以控制小车前进,后退,左右转。
关键词:两轮自平衡小车加速度计陀螺仪数据融合滤波PID算法Design of Control System of Two-WheelSelf-Balance Vehicle based on MicrocontrollerAbstractTwo-wheel self-balance vehicle is a kind of highly unstable two-wheel robot. The characteristic of two-wheel vehicle is the nature of the instability as traditional inverted pendulum, and effective control must be exerted if we need to make it stable. This paper presents a design scheme of two-wheel self-balance vehicle. We need using gravity accelerometer gyroscope sensor MPU6050 for the inclination angle of vehicle, and using complementary filter for the data fusion of gyroscope and accelerometer. We choose an 8-bit microcontroller named STC12C5A60S2 from STC Company as main controller of the control system. The main controller output control signal, which is based on the data from the sensors, to the motor drive chip named TB6612FNG for controlling two motors of vehicle, and keeping the vehicle in balance. After the completion of the control system, the vehicle can achieve autonomous balance under the conditions of unmanned intervention, the vehicle can adjust automatically and restored to a stable state quickly in the case of giving appropriate interference as well. In addition, we can control the vehicle forward, backward and turn around.Key words: Two-Wheel Self-Balance Vehicle; Accelerometer; Gyroscope; Data fusion; Complementary filter; PID algorithm1 绪论 (1)1.1自平衡小车的研究背景 (1)1.2 自平衡小车研究意义 (1)1.3 论文的主要内容 (2)2 课题任务与关键技术 (2)2.1 主要任务 (2)2.2关键技术 (2)2.2.1 系统设计 (2)2.2.2 数学建模 (2)2.2.3姿态检测 (3)2.2.4 控制算法 (3)3 系统原理分析 (3)3.1 控制系统任务分解 (3)3.2 控制原理 (4)3.3 数学模型 (5)4 系统硬件设计 (6)4.1 STC12C5A60S2单片机介绍 (7)4.2 电源管理模块 (8)4.3 车身姿态感应模块 (9)4.3.1 加速度计 (10)4.3.2 陀螺仪 (12)4.4 电机驱动模块 (14)4.5 速度检测模块 (16)5 系统软件设计 (16)5.1 软件系统总体结构 (17)5.2 单片机的硬件资源配置 (18)5.2.1定时/计数器设置 (18)5.2.2 PWM输出设置 (20)5.2.3 串行通信设置 (23)5.2.4 中断的开放与禁止 (26)5.3 MPU6050资源配置 (27)5.3.1 普通IO口模拟IIC通讯 (28)5.3.2 MPU6050资源配置 (32)5.4 系统控制算法设计 (34)5.4.1 PID算法 (34)5.4.2 互补滤波算法 (35)5.4.3 角度控制与速度控制 (35)5.4.4 输出控制算法 (36)6 总结与展望 (37)6.1 总结 (37)6.2 展望 (37)参考文献 (38)1 绪论1.1自平衡小车的研究背景近几年来,随着电子技术的发展与进步,移动机器人的研究不断深入,成为目前机器人研究领域的一个重要组成部分,并且其应用领域日益广泛,其所需适应的环境和执行的任务也更复杂,这就对移动机器人提出了更高的要求。
基于单片机的两轮自动平衡小车设计

P14
X1
PH4
VCC 3
3 硬件电路设计 3.1 角速度传感器-陀螺仪设计
角速度传感器 EN-03 具有体积小尧 重量轻尧 低功耗等特点遥 它应用了旋转坐标系中的物体会受 克里利奥力的原理袁 在器件中应用压电陶瓷做成振 动单元袁 输出一个与角速度成正比的模拟电压值遥 在车模上安装陀螺仪袁 可以测量车模倾斜的角速
度袁 将角速度信号进行积分便可以得到车模的倾角 渊见图 3冤遥
两轮自平衡小车采用倒立摆的平衡控制原理自 主保持车体动态平衡袁 两个后轮平行共轴放置袁 且 各由一个直流减速电机单独驱动曰 工作时需通过获 取倾角和电机的速度运行袁 从而完成前进尧 后退和 转弯等功能遥 其系统具有非线性尧 强耦合尧 不稳定 系统等特点[1]遥 文献[2]研究了一种基于 MMA7260 两轮自平衡小车控制系统设计曰 文献[3]提出了基 于单片机控制的小车在跷跷板上的平衡系统设计曰 文献[4-5]对两轮自平衡小车的建模和控制进行了 研究曰 文献[6]研究了一种两轮自平衡机器人运动 控制遥 本文通过 MMA7361 加速度传感器尧 EN-03 陀螺仪感知的小车运动状态袁 并将实时数据通过单 片机片内 10 位 A/D 进行数据处理袁 单片机根据角 度传感器传来的数据判断小车的状态袁 采用 PI 控 制算法袁 输出 PWM 驱动 L298 芯片控制电机正反 转和速度袁 使车体保持平衡运动遥 1 两轮自平衡小车的设计方案
Copyright©博看网 . All Rights Reserved.
术 Applied Technology 应 用 技
是将控制直立和方向的控制信号叠加在一起加载电
机上袁 只要电机处于线性状态就可以同时完成上面
两个任务遥 速度是通过调节车模倾角来完成的袁 不
基于AVR单片机的智能小车方案设计书

2013届毕业生毕业论文(设计)题目:基于AVR单片机的智能小车设计院(系)别信息科学与电气工程学院专业电气工程及其自动化班级电气091学号090819128姓名周国旺指导教师丁晓冬二○一三年六月原创声明本人周国旺郑重声明:所呈交的论文“基于A VR单片机的智能小车设计”,是本人在导师丁晓冬的指导下开展研究工作所取得的成果。
除文中特别加以标注和致谢的地方外,论文中不包含任何其他个人或集体已经发表或撰写过的研究成果,对本文的研究做出重要贡献的个人和集体均已在文中以明确方式标明,本人完全意识到本声明的法律后果,尊重知识产权,并愿为此承担一切法律责任。
论文作者(签字):日期:2013年06月13日摘要智能车作为现代社会的新生产物,是未来的发展的一个重要方向,它可以按照预定的模式在特定的环境里自动的运作,无需人为管理,便可以完成预期目标。
智能车以及在智能车辆基础上开发出来的产品已成为航天、医疗、工业控制、物流等各个领域的关键设备。
本设计中的理论方案、分析方法及特色与创新点等对智能化机器人,智能家用电器等自动半自动机器人的设计与普及有一定的参考意义。
整个智能小车的设计主要以AVR单片机为控制核心,以四轮玩具小车为控制对象,实现小车的循迹运行、躲避障碍物等功能。
本设计通过红外线光电传感器,实现循迹功能,通过红外避障传感器实现智能小车的躲避障碍的功能。
通过单片机的控制,将各模块有效整合在一起,达到所预期的目标。
关键词:AVR单片机,智能小车,循迹,避障AbstractSmart car is an important direction for the future development as a new product of modern society. It can operate automatically in a specific environment according to the predetermined pattern and will be able to complete the intended target without user’s management. Smart car and other products based on smart car has become the key equipment for aerospace, medical, industrial control, logistics and other fields. The design of theory scheme and analytic method, features and innovations etc. which have some reference value on the design and popularity of semiautomatic robot automatically such as intelligent robots, intelligent household appliances.The design of the smart car is based on AVR microcontroller to control the four-wheel toy car, and eventually to implement tracking operation and avoiding obstacles. This design implement the tracking function through the infrared photoelectric sensor and implement the avoiding obstacles function through the infrared avoidance sensor. Integrating the various modules together by the control of the microcontroller ,and eventually achieving the desired objectives.Key words: AVR microcontroller ,Smart car ,Traction ,Obstacle avoidance目录1绪论 01.1研究的背景和意义 01.2国内外研究现状 01.2.1国外智能车辆研究现状 01.2.2国内智能车辆研究现状 (1)1.3本次设计的主要任务 (2)2系统方案设计 (3)2.1总体设计框图 (3)2.2核心控制单元的选择 (3)2.3寻迹方案设计 (4)2.4避障方案设计 (5)2.5电机驱动方案选择 (6)2.6电机选择 (6)2.7小车选择 (6)3系统硬件电路设计 (8)3.1最小系统电路 (8)3.2寻迹模块电路 (9)3.3避障模块 (10)3.4电机驱动模块 (12)3.4.1 L298N电机驱动芯片 (12)3.4.2 PWM调速原理 (13)3.4.3驱动电路 (14)3.5系统抗干扰设计 (15)3.5.1干扰的基本要素 (15)3.5.2干扰的分类 (15)3.5.3硬件抗干的设计 (15)4系统软件设计 (17)4.1 ICCAVR简介 (17)4.2主控制模块主程序设计 (18)4.3红外循迹模块子程序设计 (18)4.4红外避障模块子程序设计 (20)4.5电机控制子程序设计 (21)5结论 (23)致谢 (24)参考文献 (25)附录A 总电路图 (26)附录B 源程序 (28)周国旺:基于AVR单片机的智能小车设计1绪论1.1研究的背景和意义随着计算机,微电子技术的快速发展,智能化技术的开发越来越快,智能程度也越来越高,应用的范围也得到了极大的扩展。
基于两轮自平衡小车的测控系统课程设计教学改革
基于两轮自平衡小车的测控系统课程设计教学改革随着科技的不断发展和应用,越来越多的机器人产品被广泛应用于生产制造、医疗、军事等领域。
小型自平衡车是一种智能机器人,可以通过自主平衡实现轻松地在平地上行走,因此具有广泛的应用前景。
基于两轮自平衡小车的测控系统课程设计教学改革,旨在通过设计、制作、调试自平衡小车,从实践中掌握现代测控系统的思想和方法,提高学生的实践技能和创新能力。
一、课程设计的背景和意义随着工业自动化和智能化发展,具备测控技术知识的工程技术人才越来越受到市场的需求。
而现代测控技术是以微电子技术、计算机技术、传感器技术、通信技术和控制技术为支撑的交叉学科,涉及硬件、软件、通信、控制等众多方面。
因此,设计和制作一种能够自主平衡的小型机器人,可以让学生系统地学习实践中的传感器应用、信号检测、控制算法等知识,全面了解测控技术的相关环节,为将来从事相关工作打下坚实的理论基础和实践经验。
此外,通过小型自平衡车的课程设计,可以帮助学生发展计划、设计和执行实验的能力,培养创新思维和探究精神,提高学生自主学习和解决实际问题的能力,同时也可以激发学生的兴趣和热情。
二、课程设计的主要内容1.硬件设计:设计并制作两轮自平衡小车的机械结构,选择合适的驱动电机和电子元器件,搭建硬件电路,完成电路的连接和电池充电电路的设计等。
2.传感器应用:选择合适的加速度计、陀螺仪等传感器进行安装和调试,学习传感器应用知识和掌握传感器数据采集和处理技术。
3.控制算法:研究自平衡控制算法的理论原理,利用MATLAB等软件进行模拟仿真,从而设计出基于PID控制算法的控制程序,并进行实验验证。
4.软件开发:基于Arduino开发板平台,利用C/C++语言开发控制程序,完成传感器数据采集、控制命令输出、状态显示等功能。
5.整体调试:对自平衡小车进行硬件和软件的整体调试,通过调整参数等方法完成自平衡小车的控制和平衡。
三、教学改革的具体举措1. 课程设置的改革:在测控系统单元中,增加以小型自平衡车为主题的课程设计,将理论与实践相结合,通过设计和制作自平衡小车,培养学生的实际操作能力和创新意识。
基于单片机的两轮自动平衡小车系统的设计
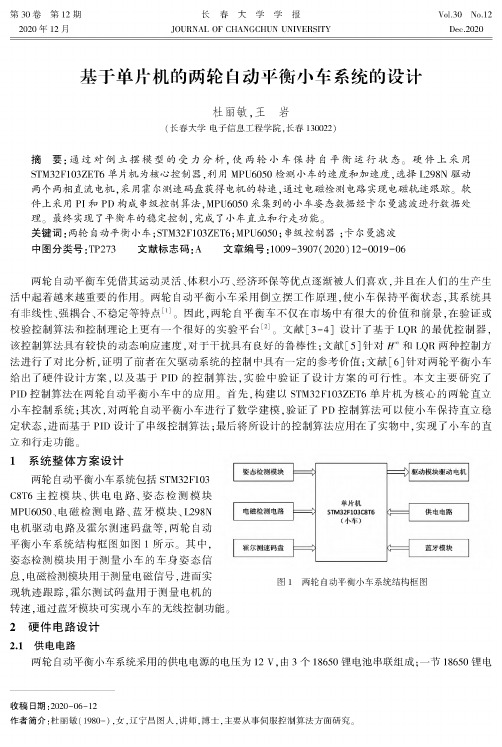
第30卷第12期2020年12月长春大学学报JOURNAL OF CHANGCHUN UNIVERSITYVol.30No.12Dec.2020基于单片机的两轮自动平衡小车系统的设计杜丽敏,王岩(长春大学电子信息工程学院,长春130022)摘要:通过对倒立摆模型的受力分析,使两轮小车保持自平衡运行状态。
硬件上采用STM32F103ZET6单片机为核心控制器,利用MPU6050检测小车的速度和加速度,选择L298N驱动两个两相直流电机,采用霍尔测速码盘获得电机的转速,通过电磁检测电路实现电磁轨迹跟踪。
软件上采用PI和PD构成串级控制算法,MPU6050采集到的小车姿态数据经卡尔曼滤波进行数据处理。
最终实现了平衡车的稳定控制,完成了小车直立和行走功能。
关键词:两轮自动平衡小车;STM32F103ZET6;MPU6050;串级控制器;卡尔曼滤波中图分类号:TP273文献标志码:A文章编号:1009-3907(2020)12-0019-06两轮自动平衡车凭借其运动灵活、体积小巧、经济环保等优点逐渐被人们喜欢,并且在人们的生产生活中起着越来越重要的作用。
两轮自动平衡小车采用倒立摆工作原理,使小车保持平衡状态,其系统具有非线性、强耦合、不稳定等特点⑴。
因此,两轮自平衡车不仅在市场中有很大的价值和前景,在验证或校验控制算法和控制理论上更有一个很好的实验平台[2]。
文献[3-4]设计了基于LQR的最优控制器,该控制算法具有较快的动态响应速度,对于干扰具有良好的鲁棒性;文献[5]针对和LQR两种控制方法进行了对比分析,证明了前者在欠驱动系统的控制中具有一定的参考价值;文献[6]针对两轮平衡小车给出了硬件设计方案,以及基于PID的控制算法,实验中验证了设计方案的可行性。
本文主要研究了PID控制算法在两轮自动平衡小车中的应用。
首先,构建以STM32F103ZET6单片机为核心的两轮直立小车控制系统;其次,对两轮自动平衡小车进行了数学建模,验证了PD控制算法可以使小车保持直立稳定状态,进而基于PID设计了串级控制算法;最后将所设计的控制算法应用在了实物中,实现了小车的直立和行走功能。
毕业设计任务书-(基于单片机的两轮平衡车控制系统设计)

任务书填写要求
1.毕业设计任务书由指导教师根据各课题的具体情况填写,经学生所在学院的负责人审查、负责人签字后生效。
此任务书应在毕业设计开始前一周内填好并发给学生;
2.任务书内容必须用黑墨水笔工整书写或按教务处统一设计的电子文档标准格式(可从教务处网页上下载)打印,不得随便涂改或潦草书写,禁止打印在其它纸上后剪贴;
3.任务书内填写的内容,必须和学生毕业设计完成的情况相一致,若有变更,应当经过所在专业及学院领导审批后方可重新填写;
4.任务书内有关“学院”、“专业”等名称的填写,应写中文全称,不能写数字代码。
学生的“学号”要写全号(如020*******,为10位数),不能只写最后2位或1位数字;
5.有关年月日等日期的填写,应当按照国标GB/T 7408—94《数据元和交换格式、信息交换、日期和时间表示法》规定的要求,一律用阿拉伯数字书写。
如“2004年3月15日”或“2004-03-15”。
毕业设计任务书
毕业设计任务书。
基于AVR单片机智能小车设计

目录1.设计概述 (1)1.1.编写目的 (1)1.2.研究背景 (1)1.3.开发运行环境 (2)1.4.功能描述 (2)2.总体设计(或者设计结构) (3)2.1.硬件设计结构 (3)2.2.软件设计流程 (3)3.硬件模块设计 (4)3.1.稳压模块 (4)3.2.主控板模块 (4)3.3.驱动模块 (6)3.4.传感器模块 (7)4.软件模块设计 (10)4.1.PWM波模块 (10)4.2.延时模块 (10)4.3.前进、后退、左转、右转模块 (11)4.4.小车直线前进、后退循迹 (12)4.5.起始区 (16)4.6.停止区 (16)4.7.小车左转 (17)4.8.小车右转 (18)5.实验结果分析(仿真分析) (19)6.设计特点 (19)7.设计总结 (19)8.参考文献 (22)1.设计概述1.1.编写目的中国机器人大赛暨RoboCup公开赛机器人旅游项目比赛一直是我们关注并且参与的比赛,基于多种平台都可以实现对小车底盘的控制,对不同的平台其描述语言不同,但其编程思想是相同的。
我编写这份设计报告是为了向大家说明我的编程思想,以及我是如何用AVR实现对小车底盘的控制,对同学们以后做小车底盘控制起到借鉴的作用。
虽然大家以后选择的平台可能不一样,但其编程思想终归相同,这份报告能引导你思考,给你一点启发。
1.2.研究背景中国机器人大赛暨RoboCup公开赛由中国自动化学会机器人竞赛工作委员会、RoboCup中国委员会、科技部高技术研究发展中心主办,是中国最具影响力,最权威的机器人技术大赛、学术大会和展览,而机器人旅游项目比赛更是参赛队伍最庞大的,竞争最激烈的比赛。
这个比赛的核心就是对小车底盘的控制,所以对小车底盘控制的好坏对整个比赛起着举足轻重的作用,可以说对小车底盘的控制直接决定了比赛的结果。
目前,在我们的参赛队伍中,小车底盘控制的主要平台是AVR单片机,但随着对小车控制指标的逐年提高,近年来不断地出现资源更加丰富,处理速度更快的一些平台,如飞思卡尔专用单片机、STM32单片机、ARM单片机、CPLD、FPGA等等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第1 期
张飞云 , 等: 基于 A V R单 片机 的两轮 自平衡 小车设计
・ 5 9・
综上 可 知 , 在 上述 系 统 硬 件基 础 上 利 用 比例 与积
分算法可以实现对传感器输入信号的跟随, 使系统达
到 动态平 衡 .
; 行通 信接 口电路 卜 - _ 一 . -
I
A V R m e g a 8单片机 完成对其信号的采集与计算 , 并向电机驱动器发送信号去执行相应的动作 , 从而 实现 小车的动 态平衡功能.
关键词 : 两轮 自平 衡 小车 ; 角速 度 传 感 器 ; 陀螺 仪 ; A V R; P I 中 图分 类 号 : T P 2 4 文献 标 志码 : A 文章编号 : 1 6 7 4—3 3 0 X( 2 0 1 3 ) 0 1 — 0 0 5 8— 0 3
移动机 器人 技术 是 目前 科学 技术 发展 最活跃 的领 域 之一 , 而 两轮 自平 衡 小车 又是 移 动机 器人 研 究 中 的
一
个 重要 领域 . 两轮 自平衡 小 车是一 个高 度不稳 定 的两 轮机 器人 , 它 两轮 同轴 、 车身 中心 位 于车轮 轴 的上
方、 独 立驱 动 、 靠 运动 保持平 衡 . 本研究 从最 基本 的单轴 动态 平衡 着手 , 通过优 化 P I 算法 , 最终实 现 了仅 用 角 速度传感 器 的多轴 动态平 衡 达到在 价格 敏感 产 品中低成 本 、 高 效率 , 在价 格不 十分敏感 的产 品 中和加速度 相 结合 的效果 .
第2 5卷 第 1 期
2 0 1 3年 3月
河 南工程 学院学报(自然科 学版 )
J O U R N A L O F H E N A N I N S T I T U T E O F E N G I N E E R I N G
V0 1 . 2 5. No .1 Ma r . 2 01 3
1 系统 Ma t l a b仿 真
为 了保证 方案 的可行 性 , 首先利 用 Ma t l a b 里的 s i m u l i n k组 件 对 系统 的机 械 部分 、 传 感 器部 分 和 P I 控 制 器算 法部分 建立仿 真模 型 , 得到仿 真 系统运行 效 果 图 、 系统对 输入 信号 的跟 随效 果 图和执行 机构信 号波 形
在仿真时可以左右摆动. 在斜立杆的顶端是传感器信号采集点 , 系统整体姿态依靠对此点传感器信号的采集 计算 . 在系统仿真时, 斜立的杆左右摆动 , 完成对正弦波信号 的跟踪, 不会 出现倒 向一个方向的情况. 由图 2 可知 , 传感器输出信号稍滞后于输入信号. 执行机构得到的信号波形图和系统对输入信号的跟随效果图是同
度传感器与 A T M E L公司生产 的 A V R m e g a 8 单片机作
为控 制核 心 , 以s T公 司生 产 的 L 2 9 8芯 片 作 为 电机 的
驱动芯片, 得到系统总体框图 , 如图 4所示.
2 . 2 电路模块
J P1 4
2 . 2 . 1 角速度 传感 器 电路
VC C
GND
角速度传感器采用 日本村 田制作所制造 的 E N C
一
皇
0 3 R系列传 感器 , 系统 角 速 度传 感 器 电路 见 图 5 . 该
0 I r r VREF
图 3 执 行 机构 信 号波 形
Fi g . 3 Si g na l wav e f o r m o f a c t u at o r
在 图 1中 , 运动模 型的底部 水平部 分 可 以左 右移 动. 斜 立 的杆 和底 部运 动 部分 的 中点 相 连接 , 斜 立 的杆
图分别 如 图 1 、 图 2和图 3所 示 .
图 1 仿 真 系 统 运 行效 果 图
Fi g .1 O pe r at i on r e nde r i ng of s i m ul a io t n s y s t e m
图2 系统 信 号 跟 随效 果 图
Fi g. 2 Fo l l o w r e nde r i ng o f s y s t e m s i g n al
时基 的. 将两 图结 合起 来发 现 , 当传 感器 信号 为正半 周 时 , 执行 机构 的信号 刚好 为负半 轴 , 这证 明了系统 对偏 差 的纠正 . 当结构 整体 朝一个 方 向倾 斜 时 , 执行 机构 会产 生反 向力矩 去矫正 系统偏 差并 维持 系统平衡 .
收稿 日期 : 2 0 1 3一 叭 一0 2 基金项 目: 河南省教 育厅科学技术研 究重点项 目( 1 2 A 5 1 0 0 2 1 ), 许 昌市科技局计划项 目( 1 1 0 1 0 6 0) 作者简介 : 张飞云( 1 9 7 6 一) , 女, 河南周 口人 , 讲 师, 硕士 , 主要从事信 号处理 方面的研究.
基于 A V R单 片机 的 两轮 自平衡 小 车 设计
张飞云 , 胡 静
( 1 . 许 昌学 院 电气信 息工程 学 院 , 河南 许昌 4 6 1 0 0 0 ; 2 . 南召县 电业局 , 河 南 南召 4 7 4 6 5 0 )
摘 要: 利用 M a t l a b对两轮 自平衡 小车的控制 系统进行仿真 , 确定算法的可行性. 采用角速度传感 器组建 陀螺仪 系统, 通过
I
AVR
—
ቤተ መጻሕፍቲ ባይዱ
电机驱动 电路
me g a 8
2 硬 件 设 计
2 . 1 所 用器 件
荩准 电j 卡源 电路 —一 单片机
— —
角速 度传 感器 电路
采用 日本 村 田制作 所制 造 的 E N C一 0 3 R系列 角速
图 4 系统 总体 框 图
F i g . 4 S y s t e m o v e r a l l d i a g r a m