索佳全站式陀螺仪定向原理
测绘专业实验实习—— 陀螺仪定向原理

2. 陀螺仪定向原理与使用方法
2.3 陀螺仪的分类
陀螺经纬仪
上架式
全站式陀螺仪
上架式
全自动全站式陀螺仪
下架式
2. 陀螺仪定向原理与使用方法
2.4 陀螺仪的基本结构
陀螺仪的结构
悬挂带
全站式陀螺仪是将陀螺仪安放 在全站仪之上而构成的,其中
陀螺
陀螺仪部分的基本结构如右 图。
分划板
目镜筒
2. 陀螺仪定向原理与使用方法
4. 陀螺仪的基本结构
2. 陀螺仪定向原理与使用方法
2.2 陀螺仪定向原理-陀螺仪相对地球的运动
当陀螺仪在北纬某地设站,其主 轴无论是方位角(相对子午线) 和高度角(相对水平面)都不停 地发生变化。
由此可见,陀螺仪主轴在地球上 的视运动,不仅与纬度有关,还 与主轴与子午面及水平面之间的 夹角有关。
2. 陀螺仪定向原理与使用方法
2. 陀螺仪定向原理与使用方法
1. 陀螺仪的定轴性、进动性
1 定轴性 陀螺轴在不受外力作用时,它的方向始终指向初始恒定方向;
2 进动性 陀螺轴在受到外力作用时,将产生非常重要的效应-“进动”。
2. 陀螺仪定向原理与使用方法
1. 陀螺仪的定轴性、进动性
如右下图,左端为一可转动的陀螺,右端为一可移动的悬重。
(1)指向力矩MH
MH=HEcos sin
E- 地球自转角速度 - 测站地理纬度 - 陀螺主轴与子午面之间的
索佳全站式陀螺仪定向原理

3
二、陀螺仪的基本原理
陀螺经纬仪是根据自由陀螺仪(在不受外力作用时,具有 三个自由度的陀螺仪)的原理而制成的。自由陀螺仪具有以下 两个基本特性:
4
1、定轴性 陀螺轴在不受外力作用时,它的方向始终指向初始恒定方向; 2、 进动性 陀螺轴在受到外力作用时,将产生非常重要的效应——“进动”。 自由陀螺仪的上述两个特性,可通过以下实验予以证明。
21
仪器在测站安置好后,将经纬仪视准轴大致摆在北方向后, 起动陀螺马达,达到额定转速后,下放陀螺灵敏部,松开经纬仪 水平制动螺旋,用手转动照准部跟踪灵敏部的摆动,使陀螺仪目 镜视场移动的光标像与分划板零刻划线 随时重合。当达到摆动逆转点时,读取水平度盘µ1;用同样的方 法向反方向跟踪,到达另一点逆转点时,再读取水平读数µ2。锁 紧灵敏部,制动陀螺马达。按下式计算近似北在水平度盘上的读 数: N=1/2(µ1+µ2 )
23
第三步,测量悬挂带零位值——测前零位,同时用秒表测定 陀螺摆动周期。 第四步,用逆转点法精确测定陀螺北方向值NT。 启动陀螺马达,缓慢下放灵敏部,使摆幅在1°~3°范 围内。调节水平微动螺旋使光标像与分划板零刻度线随时保 持重合,到达逆转点后,记下经纬仪水平度盘读数。连续记 录5个逆转点的读数u1、u2、u3、u4、u5,并按下式计 算NT:
26
提问与讨论……
27
11
若陀螺仪灵敏部重量为P,且认为是集中作用于重心O1,重心 O1至悬挂点O的距离为1,则此时因地平面绕y轴旋转而引起的 力矩为: MB=Plsinθ=Msinθ 这时x轴进动的角速度为: ωP=(M/H)sinθ
12
• 摆式陀螺的进动与地球自转影响的平衡 由于与地球转动的同时,子午面亦在按地转铅垂分量ω2 不 断地变换位置。故即使某一时刻陀螺仪轴与地平面平行且位 于子午面内,但下一时刻陀螺仪轴便不再位于子午面内,因 此陀螺仪轴与子午面之间具有相对运动的形式。当陀螺仪轴 的进动角速度ωP与角速度分量ω2相等时,则陀螺仪轴与仪 器所在地点的子午面保持相对静止。
索佳全站仪系列特点介绍

目 录
一、 全站仪 1、索佳全站仪产品系列简介 2、索佳全站仪主要特点介绍 3、索佳特型产品 二、水准仪 1、0.2mm光学水准仪
2、0.3mm电子水准仪(新)
三、索佳全站仪解决方案简介 四、小结
2
索佳产品总览
GNSS参考站 GSR2700 RSX 双频一体化 GSR2700 IS/ISX SET X系列 GIS型GPS:GIR1600
测量机器人NET05/1
SET 20/20K 系列
NET1200
单频Stratus
电子水准仪
SET30RK3全站仪
全站式陀螺仪
激光扫平、铅垂仪 光学水准仪
激光经纬仪
3
1.1 索佳全站仪系列
(0.8mm+1ppm)
(1mm+1ppm)
NET05 SRX、 NET1
(2mm+2ppm)
自动型全站仪
SETX、NET1200
补偿范围
数据存储 通讯端口 显示器
大于±12'
内存 10000 点、 SD 卡、USB 闪存 RS-232C、一级蓝牙(选配) 192 x 80 点阵LCD 图形显示器、屏幕尺寸 71.5 x 31mm
键盘
瞄准器与自动调焦 遥控器 机载软件 测量程序 电源 防尘防水等级 尺寸与重量
带背光27键 (字母数字键) + 测量键
31
1.3 NET05-更好的操作性能:现代化的屏幕触摸操作技术
(8)屏幕可触摸操作,独特凹型按键设计,可背景光照 明数字字母键盘,充分体现人性化设计。
32
1.3 NET05-更好的操作性能:现代化的数据通讯技术
(9)集现代数据通讯技术之大全: RS232、蓝牙、双USB、CF/SD卡
索佳 GYRO1X 2X 3X 自动全站式陀螺仪 说明书
1!!!!!使 用 说 明 书2!!!!!!!!!!!!!!使 用 说 明 书相关使用说明书y GYRO1X/2X/3X随机配备下列使用说明书:1.《GYRO1X/2X/3X自动全站式陀螺仪使用说明书》介绍自动全站式陀螺仪的操作方法。
2.《SRX系列电子全站仪使用说明书》介绍SRX系列电子全站仪的基本功能及其操作方法。
符号和约定 本说明书使用下列符号和约定::表示操作前应阅读的注意事项和重要内容。
:表示参阅章节的名称。
:表示补充说明。
:表示特别术语或操作的说明。
[软键]等 :表示屏幕显示的功能软键。
{按键}等 :表示操作面板上的按键。
相关说明 y除特别说明外,说明书中的“SRX”均表示“SRX1X/2X/3X”。
y除特别说明外,说明书的“GYRO X”均表示“GYRO1X/2X /3X”。
41.安全操作须知 (1)2.注意事项 (5)3.激光安全信息 (7)4.仪器部件名称 (9)4.1全站式陀螺仪的特点 (9)4.2仪器部件名称 (10)4.3模式结构图 (12)5.基本操作 (13)5.1按键基本功能 (13)6.电池充电 (15)7.测前准备和结束测量 (17)7.1仪器连接 (17)7.2陀螺测量前准备工作 (19)7.3陀螺程序启动与退出 (21)7.4结束陀螺测量 (23)8.真北方向测定 (24)8.1方位角显示 (25)8.2真北方向测定 (26)9.仪器常数测定 (33)10.错误信息 (38)11.故障处理 (39)11.1更换保险丝 (40)512.仪器检查 (41)12.1悬挂带检查 (42)12.2检查模式 (42)13.标准配置 (45)14.技术指标 (47)15.规范 (49)16.附录:陀螺仪原理 (50)61.为确保安全操作,避免造成人身伤害或财产损失,本说明书使用“警告”或“注意”来提示应遵循的条款。
在阅读本说明书主要内容之前,请首先弄清这些提示的含义。
提示含义本符号用于需特别注意条款的提示,有关细节说明随符号给出。
陀螺仪原理
陀螺仪原理
陀螺仪是一种利用陀螺效应来测量和维持方向的仪器。
它的原理基于物体的角
动量守恒定律,通过旋转的陀螺来感知方向的变化。
陀螺仪的原理在航空航天、导航系统、惯性导航等领域有着广泛的应用。
首先,我们来了解一下陀螺效应。
当一个陀螺体在外力作用下发生偏转时,它
会产生一个与偏转方向垂直的陀螺力,这就是陀螺效应。
这个效应是由于陀螺体旋转时角动量守恒的结果,使得陀螺体在偏转时保持一定的方向,这就是陀螺仪原理的基础。
其次,陀螺仪的工作原理是通过测量陀螺体的角速度来确定方向。
当外部力使
得陀螺体发生偏转时,陀螺仪会感知到这个偏转,并通过测量陀螺体的角速度来确定偏转的方向和大小。
这样就可以实现对方向的测量和维持,使得陀螺仪可以在航空航天、导航系统等领域发挥重要作用。
陀螺仪的原理还可以通过惯性导航系统来加以应用。
惯性导航系统是一种利用
陀螺仪和加速度计来测量和维持方向的导航系统。
通过测量陀螺仪和加速度计的数据,可以确定物体的位置和方向,从而实现导航和定位的功能。
总的来说,陀螺仪的原理是基于陀螺效应和角动量守恒定律,通过测量陀螺体
的角速度来确定方向。
它在航空航天、导航系统、惯性导航等领域有着广泛的应用,可以实现对方向的测量和维持,是一种非常重要的仪器和技术。
陀螺定向方法和精度评定解析

陀螺定向⽅法和精度评定解析陀螺逆转点法定向及精度评定摘要隧道或井巷⼯程测量导线布设的形式因受巷道形状的制约,若单纯采⽤改变导线布设形式或提⾼测⾓次数与精度等⽅法,往往难以满⾜⼯程施⼯对于测量的精度要求。
陀螺经纬仪是测量井下导线边⽅位⾓、提⾼测量精度的重要仪器。
尤其是在贯通测量中陀螺经纬仪的应⽤⾮常⼴泛。
贯通测量是⼀项⼗分重要的测量⼯作,必须严格按照设计要求进⾏。
巷道贯通后,其接合处的偏差不能超过⼀定限度,否则就会给采矿⼯程带来不利影响,甚⾄造成很⼤的损失。
本⽂对陀螺经纬仪⼯作原理介绍,以及陀螺经纬仪在贯通测量中的精度评定。
陀螺经纬仪在不同领域的贯通测量⼯作中运⽤实例的分析,总结出在贯通测量导线加测陀螺定向边的最佳位置。
关键词:陀螺定向,贯通测量,陀螺经纬仪,精度评定ABSTRACTTunnel or shaft engineering measurement wires for the form of roadway, if simple shape by changing arrangement forms or improve wires and precision Angle measurement methods, and often difficult to satisfy the measurement accuracy for engineering construction. Gyro theodolite is measured in wire edge Angle, improve the measuring precision instruments. Especially in the measurement of the photoelectric theodolite gyro breakthrough is used extensively. Through measurement is a very important measurement work, must strictly according to the design requirements. The roadway expedite, its joint deviation cannot exceed a certain limit, otherwise they will be detrimental to the mining project, and even cause great losses. This paper introduces working principle of gyro theodolite, as well as the breakthrough in the measurement of the gyro theodolite accuracy assess. Gyro theodolite in different fieldsof the measurement of the examples, this paper leads in breakthrough measurement on the edge of the directional gyro adds the best position.Key words: directional gyro; through measurement; gyro theodolite; Accuracy Assessment⽬录1 绪论 (1)1.1陀螺定向的研究现状 (1)1.2研究陀螺定向的⽬的 (1)1.3陀螺定向的应⽤领域及发展趋势 (2)2 陀螺经纬仪定向测量原理与⽅法 (3)2.1陀螺经纬仪的类型与结构 (3)2.1.1 陀螺经纬仪定向的优点及应⽤领域 (3)2.1.2 陀螺经纬仪的基本结构 (3)2.1.3 陀螺经纬仪的类型 (4)2.2陀螺经纬仪定向的基本步骤 (5)2.3跟踪逆转点法测定陀螺⽅位⾓的作业过程 (7)2.3.1 陀螺仪悬带零位观测 (7)2.3.2 粗略定向 (8)2.3.3 精密定向 (9)3 陀螺定向的误差分析 (13)3.1陀螺定向的误差来源 (13)3.2陀螺定向在贯通测量中的精度评定 (14)3.2.1 陀螺⽅位⾓⼀次测定中误差 (14)3..2.2 ⼀次定向中误差 (14)3.3陀螺定向在贯通测量中导线的平差 (15)3.3.1 具有两条陀螺定向边导线的平差 (15)3.3.2 具有三条陀螺定向边导线的平差 (17)4 陀螺定向在贯通测量中的应⽤实例分析 (20)4.1陀螺定向在道路贯通测量中的应⽤实例分析 (20)4.1.1 ⼯程概况 (20)4.1.2 陀螺定向技术 (20)4.1.3 精度评定 (22)4.1.4 ⼯程分析 (23)4.2陀螺定向在矿⼭贯通测量中的应⽤实例分析 (24)4.2.1 ⼯程概况 (24)4.2.2 陀螺定向技术 (24)4.2.3 精度评定 (26)4.2.4 ⼯程分析 (27)4.3陀螺定向在⽔利贯通测量中的应⽤实例分析 (27)4.3.1项⽬概况 (27)4.3.2 陀螺定向技术 (28)4.3.3 陀螺定向精度评定 (29)4.3.4 坐标解算及成果对⽐分析 (30)4.3.5 ⼯程分析 (35)5 结论 (38)参考⽂献 (39)致谢..................................................... 错误!未定义书签。
陀螺仪瞄准的作用原理

陀螺仪瞄准的作用原理
陀螺仪瞄准的作用原理是利用陀螺的旋转稳定性来保持瞄准装置的方向稳定。
陀螺仪是一种旋转的物体,其旋转轴始终保持固定在空间中的一个方向,即陀螺仪的转轴。
当陀螺仪的转轴方向发生变化时,陀螺仪会产生一个力矩,试图使其转轴恢复到原来的方向上。
在陀螺仪瞄准装置中,陀螺仪被安装在一个可称之为瞄准平台的结构上。
瞄准平台可以根据需要进行调整,以保持陀螺仪的转轴与需要瞄准的目标保持一致的方向。
当瞄准平台需要保持固定的方向时,例如需要对准一个目标时,由于陀螺仪的旋转稳定性,陀螺仪的转轴会试图保持不变。
然而,在实际应用中,陀螺仪的转轴也会受到外界的干扰,例如震动、重力等。
为了抵消这些干扰,瞄准平台可以通过一系列的机械或电子控制装置对陀螺仪进行调整,使其转轴保持与目标一致的方向。
综上所述,陀螺仪瞄准的作用原理是利用陀螺的旋转稳定性来保持瞄准装置的方向稳定,并通过控制装置对陀螺仪进行调整,以抵消外界干扰,使其转轴始终指向目标。
陀螺仪工作原理

陀螺仪工作原理
陀螺仪利用物体的旋转运动来测量和确定物体的方向。
它基于一个原理,即旋转物体的自旋轴倾向于保持不变。
通过测量旋转轴的变化,陀螺仪可以准确地确定物体的方向。
陀螺仪通常由旋转部件和检测部件组成。
旋转部件包括陀螺盘和驱动系统,它们将物体绕一个特定的轴旋转。
检测部件包括传感器和计算单元,用于测量和分析物体的旋转。
当陀螺仪开始旋转时,陀螺盘的旋转轴会随着物体的旋转而改变。
传感器可以检测到这些旋转轴的变化,并将其转化为电信号。
计算单元接收传感器的信号,并根据这些信号计算出物体的方向。
陀螺仪的工作原理可以简单描述为以下几个步骤:首先,陀螺盘开始旋转,绕着一个特定的轴。
其次,传感器测量陀螺盘旋转轴的变化,并将其转化为电信号。
然后,计算单元接收传感器的信号,并计算出物体的方向。
最后,计算单元将计算结果输出,以供其他系统或设备使用。
陀螺仪的工作原理较为复杂,但它在导航、航空航天、惯性导航等领域中具有广泛的应用。
通过测量物体的旋转轴变化,陀螺仪可以提供准确的方向信息,帮助人们导航、定位和控制物体的运动。
陀螺全站仪在矿井定向测量中的应用

陀螺全站仪在矿井定向测量中的应用摘要:本文介绍陀螺全站仪在矿井定向测量中的应用,简述陀螺全站仪定向过程及计算方法,结合工程实例分析陀螺定向的实际精度,为今后的测量工作提供一些经验和建议。
关键词:陀螺全站仪;矿井定向;应用一、前言鞍钢某大型露天矿山开采到-175米水平后改为井下开采。
露天转井下开采工程共有9条竖井,三条斜坡道,9个水平。
井筒最深820米,最浅420米。
除两条主井外各条竖井及东、西斜坡道在-123米水平、-213米水平、-303米水平、-321米水平相向贯通;主斜坡道从地表+120水平向下与-123米水平及东、西斜坡道贯通;两条主井与副井在-567米水平、-633米水平、-695米水平单向贯通。
相向贯通巷道最长距离为3600米,最短距离为600米。
贯通面达60余个,超过2000米的贯通面有4条,超过1000米的贯通面有6条。
该工程前期已完成九条竖井的掘凿与混凝土衬砌工作,后续工程由三个工程队承担巷道施工任务。
我单位承担全部工程的控制测量任务。
为满足竖井定向的精度,我单位购买了一台索佳GP2X全站式陀螺仪。
该仪器由日本索佳公司生产,它结合GP2悬挂式陀螺仪、SET2X全站仪和全站仪内置的处理软件,陀螺仪工作时其摆会绕地球子午线摆动,通过GP2目镜对摆动的观察,并利用全站仪以水平角方式测定出摆幅或测定摆动的时间周期,然后依此计算出摆动中心的陀螺方位角。
相对于传统的陀螺仪,索佳全站式陀螺仪GP2X是由GP2陀螺仪和SET2X全站仪组合而成的用于测定真北方向的测量系统,并在全站仪中内置了逆转点法和中天法两种测量程序,结合GP2陀螺仪、SET2X全站仪和专用处理软件,SET2X全站仪可在观测完成后计算出真北方向,且计算出的真北方向可以很方便地设置到SET2X全站仪水平度盘上。
陀螺全站仪定向精度为±20″;测角精度为±2″。
竖井联系测量采用陀螺全站仪进行定向测量,采用钢丝投点法进行坐标传递测量。
土木工程测量---测量教案4章_索佳GP-1陀螺全站仪

陀螺仪是个庞大的家族,大的有数吨,小的只有 几克,种类繁多,用途广泛,现代技术尤其是航空、 航天、制导等尖端技术都离不开它。
1 陀螺仪发展历程
【逆变器的电源开关处于OFF(关闭)状态(用三芯电缆连 接)】-陀螺仪【用五芯电缆连接】; ➢通过管罗盘寻找磁北方向,确定大致的磁北方向; ➢取下陀螺锁紧扣;
6 矿山测量操作流程
➢下放陀螺测量陀螺测前零位,测量其一个周期,测量完 毕后托起陀螺处于陀螺完全锁紧位置;
下放陀螺步骤:
a).向C方向旋转GP1锁紧螺旋至使“C”标记出现,此 时,陀螺摆处于完全锁紧状态。
回),测量陀螺方位角,再求两个(或三个)仪器常数△2; ⑷.同一边任意两测回测量陀螺方位角的互差不得超过40″; ⑸.井下同一定向边两次独立陀螺全站仪定向平均值的中误
差为10“,其互差不得超过40″;根据在同一边上多次测量的陀螺 方位角求算:
v-同一边陀螺方位角的平均值与一测回测定值的差数; n-测量陀螺方位角的次数。 ⑹.井上、下观测应由同一观测者进行,仪器在搬运时,应 防止颠簸和震动。
再次下放陀螺使其摆幅在810格之间中天法开始观测至少测量2个周期相邻时间差的互差不能超过04s间隔时间差的互差不能超过06s测量完毕后托起陀螺使陀螺处于完全锁紧位置定出陀螺北方向转动望远镜至目标点仪器上所显示的az为此测线的陀螺方位角值
sokkia
--陀螺全站仪
索佳测绘仪器贸易(上海)有限公司
营业推进部
下放陀螺,通过逆转点法确定北方向在±2°之内,然后托 起陀螺;照准大致确定的北方向,再次下放陀螺,控制摆幅在 5-8格之间,用逆转点法开始通过全站仪平稳的精确跟踪逆转 点【不能骤然跟踪,否则测量出来的陀螺北方向不准确】;
陀螺仪原理——精选推荐

陀螺仪原理现象解释陀螺仪原理⾼速旋转的物体的旋转轴,对于改变其⽅向的外⼒作⽤有趋向于垂直⽅向的倾向。
⽽且,旋转物体在横向倾斜时,重⼒会向增加倾斜的⽅向作⽤,⽽轴则向垂直⽅向运动,就产⽣了摇头的运动(岁差运动)。
当陀螺经纬仪的陀螺旋转轴以⽔平轴旋转时,由于地球的旋转⽽受到铅直⽅向旋转⼒,陀螺的旋转体向⽔平⾯内的⼦午线⽅向产⽣岁差运动。
当轴平⾏于⼦午线⽽静⽌时可加以应⽤。
[1]陀螺仪基本上就是运⽤物体⾼速旋转时,⾓动量很⼤,旋转轴会⼀直稳定指向⼀个⽅向的性质,所制造出来的定向仪器。
不过它必需转得够快,或者惯量够⼤(也可以说是⾓动量要够⼤)。
不然,只要⼀个很⼩的⼒矩,就会严重影响到它的稳定性。
⼯作原理陀螺仪原理〖论述解释〗陀螺仪,是⼀个圆形的中轴的结合体。
⽽事实上,静⽌与运动的陀螺仪本⾝并⽆区别,如果静⽌的陀螺仪本⾝绝对平衡的话,抛除外在因素陀螺仪是可以不依靠旋转便能⽴定的。
⽽如果陀螺仪本⾝尺⼨不平衡的话,在静⽌下就会造成陀螺仪模型倾斜跌倒,因此不均衡的陀螺仪必然依靠旋转来维持平衡。
陀螺仪本⾝与引⼒有关,因为引⼒的影响,不均衡的陀螺仪,重的⼀端将向下运⾏,⽽轻的⼀端向上。
在引⼒场中,重物下降的速度是需要时间的,物体坠落的速度远远慢于陀螺仪本⾝旋转的速度时,将导致陀螺仪偏重点,在旋转中不断的改变陀螺仪⾃⾝的平衡,并形成⼀个向上旋转的速度⽅向。
当然,如果陀螺仪偏重点太⼤,陀螺仪⾃⾝的左右互作⽤⼒也将失效!。
⽽在旋转中,陀螺仪如果遇到外⼒导致,陀螺仪转轮某点受⼒。
陀螺仪会⽴刻倾斜,⽽陀螺仪受⼒点的势能如果低于陀螺仪旋转时速,这时受⼒点,会因为陀螺仪倾斜,在旋转的推动下,陀螺仪受⼒点将从斜下⾓,滑向斜上⾓。
⽽在向斜上⾓运⾏时,陀螺仪受⼒点的势能还在向下运⾏。
这就导致陀螺仪到达斜上⾓时,受⼒点的剩余势能将会将在位于斜上⾓时,势能向下推动。
⽽与受⼒点相反的直径另⼀端,同样具备了相应的势能,这个势能与受⼒点运动⽅向相反,受⼒点向下,⽽它向上,且管这个点叫“联动受⼒点”。
陀螺全站仪定向精度分析—以索佳GP—1仪器为例

陀螺全站仪定向精度分析—以索佳GP—1仪器为例作者:代志广来源:《科学与技术》2018年第27期摘要:陀螺全站仪的定向精度是评价其质量的重要标准之一,从其定向方法入手,实际分析了跟踪逆转点法和时差中天法两种定向方法的原理及两种方法产生的误差,并结合某地的已知两条边实际分析陀螺全站仪的定向精度,确定其是否能达到其标称精度。
关键词:陀螺全站仪;定向精度;测定中误差;定向中误差PRECISION ANALYSIS OFGYRO THEODOLITE ORIENTATION OF SOKKIA GP-1 INSTRUMENTRANN Fei1(1China Railway Guizhou Engineering Company Limited.,Guiyang 550003,Guizhou Province,PR China)Abstract:The directional accuracy of gyro is one of the important criteria for evaluating its quality,starting from the directional method,analysis of the actual error tracking principle reversal point method and time difference method of the transit method of two directional and two kinds of methods,combined with a known two edges of the actual analysis of orientation precision of gyro,determine whether it can achieve its nominal accuracy.Key words:Gyro total station;Orientation accuracy;Primary measurement error;Primary orientation error1引言GP-1是由上架式陀螺儀和全站仪结合在一起的仪器,它利用陀螺仪本身的物理特性及地球自转的影响,实现自动寻找真北方向,从而测定地面和地下工程中任意测站的大地方位角,在地里南北不大于75°的范围内,它可以不受时间和环境等条件限制,实现快速定位。
陀螺仪的工作原理
陀螺仪的工作原理陀螺仪是一种用于测量和跟踪物体角速度的仪器,它可以通过测量物体在三个轴上的角速度来确定物体的方向和位置。
陀螺仪的工作原理基于陀螺效应,即旋转物体在转动时会产生一个相对于旋转轴的稳定轴。
一般来说,陀螺仪由一个旋转的转子和一个支撑转子的框架组成。
转子通常是一个圆盘形的金属盘,它可以在一个轴上自由旋转。
当物体旋转时,陀螺效应会使转子绕着自己的轴旋转,从而产生一个稳定的轴。
陀螺仪可以通过测量转子旋转时产生的角动量来确定物体的角速度。
角动量是一个物体在转动时所具有的动量,它等于物体的质量乘以它的角速度和它的转动惯量。
转动惯量是一个物体在转动时所具有的惯性,它取决于物体的形状和质量分布。
陀螺仪通常使用角速度传感器来测量转子旋转时产生的角动量。
角速度传感器可以通过测量转子绕着它的轴旋转时产生的电信号来确定转子的角速度。
这些信号可以被放大和处理,以便用于确定物体的角速度和方向。
陀螺仪的精度和灵敏度取决于它的转速和转动惯量。
当转速越高时,陀螺仪的精度和灵敏度就越高。
然而,高转速也会导致陀螺仪的磨损和故障。
为了提高陀螺仪的精度和灵敏度,一些高精度陀螺仪使用了超导技术和激光陀螺仪技术。
超导陀螺仪利用超导材料的特性来减少转子的摩擦和磨损。
超导材料可以在低温下表现出超导电性,从而减少转子的电阻和能量损失。
这使得超导陀螺仪可以在高速和高精度下工作,而不会受到摩擦和磨损的影响。
激光陀螺仪利用激光束的干涉效应来测量转子的旋转。
激光束会被分成两束,一束沿着转子的旋转方向传播,另一束垂直于旋转方向传播。
当两束激光束重新合并时,它们会产生一个干涉图案,可以用来测量转子的旋转角度和方向。
激光陀螺仪具有高精度和高稳定性,但它也需要高精度的光学元件和稳定的光源。
总之,陀螺仪是一种重要的测量和跟踪工具,它可以用于飞行器、导航系统、惯性测量装置等领域。
陀螺仪的工作原理基于陀螺效应,它可以通过测量转子旋转时产生的角动量来确定物体的角速度和方向。
定向陀螺仪的原理

定向陀螺仪的原理
定向陀螺仪是一种用于测量和感知运动方向的设备。
它是一种基于陀螺效应的传感器,可以测量物体的旋转角速度和旋转角度。
陀螺仪的原理涉及到牛顿力学的角动量定理,即物体在外力作用下的角动量守恒。
陀螺仪由一个旋转的轴和一个支撑轴组成。
当陀螺仪不受外力作用时,旋转轴的角速度保持不变。
当外力作用于陀螺仪时,由于角动量守恒原理,旋转轴开始发生偏离,产生一个与外力垂直的力矩,即陀螺效应。
定向陀螺仪通常由三个互相垂直的旋转轴组成,分别为X轴、Y轴和Z轴。
这
些轴上分别安装有陀螺,通过测量陀螺的角速度来获得物体绕这些轴旋转的信息。
在正常工作状态下,陀螺会保持旋转,且旋转的角速度与物体的旋转角速度成正比。
陀螺的旋转由惯性马达提供动力,该马达会提供一个恒定的力矩以维持陀螺的旋转。
当物体绕某个轴旋转时,陀螺的旋转轴会偏离原始方向,导致陀螺旋转频率发生改变。
陀螺仪通过测量陀螺的旋转频率变化来计算出物体的旋转角速度。
为了提高陀螺仪的精度和稳定性,通常会采用一些校准和修正的方法。
一个常用的方法是零偏校准,即在测量之前将陀螺仪置于静止状态,并记录其输出。
这样可以确定陀螺的零偏误差,并在实际测量中进行修正。
此外,还可以通过组合其他传感器的测量结果来提高陀螺仪的性能。
例如,可以结合加速度计的数据来进行姿态估计,利用重力加速度和角速度的测量结果来计算物体的姿态和方向。
定向陀螺仪在许多领域都有广泛的应用,如导航、惯性导航系统、飞行控制系统、机器人控制和虚拟现实等。
它可以提供精确和实时的旋转信息,帮助我们了解和控制物体的运动方向。
陀螺仪的工作原理

陀螺仪的工作原理陀螺仪的原理就是,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。
人们根据这个道理,用它来保持方向,制造出来的东西就叫陀螺仪。
我们骑自行车其实也是利用了这个原理。
轮子转得越快越不容易倒,因为车轴有一股保持水平的力量。
陀螺仪在工作时要给它一个力,使它快速旋转起来,一般能达到每分钟几十万转,可以工作很长时间。
然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。
现代陀螺仪是一种能够精确地确定运动物体的方位的仪器,它是现代航空,航海,航天和国防工业中广泛使用的一种惯性导航仪器,它的发展对一个国家的工业,国防和其它高科技的发展具有十分重要的战略意义.传统的惯性陀螺仪主要是指机械式的陀螺仪,机械式的陀螺仪对工艺结构的要求很高,结构复杂,它的精度受到了很多方面的制约.自从上个世纪七十年代以来,现代陀螺仪的发展已经进入了一个全新的阶段。
1976年等提出了现代光纤陀螺仪的基本设想,到八十年代以后,现代光纤陀螺仪就得到了非常迅速的发展,与此同时激光谐振陀螺仪也有了很大的发展。
由于光纤陀螺仪具有结构紧凑,灵敏度高,工作可靠等等优点,所以目前光纤陀螺仪在很多的领域已经完全取代了机械式的传统的陀螺仪,成为现代导航仪器中的关键部件.和光纤陀螺仪同时发展的除了环式激光陀螺仪外,还有现代集成式的振动陀螺仪,集成式的振动陀螺仪具有更高的集成度,体积更小,也是现代陀螺仪的一个重要的发展方向。
现代光纤陀螺仪包括干涉式陀螺仪和谐振式陀螺仪两种,它们都是根据塞格尼克的理论发展起来的。
塞格尼克理论的要点是这样的:当光束在一个环形的通道中前进时,如果环形通道本身具有一个转动速度,那么光线沿着通道转动的方向前进所需要的时间要比沿着这个通道转动相反的方向前进所需要的时间要多.也就是说当光学环路转动时,在不同的前进方向上,光学环路的光程相对于环路在静止时的光程都会产生变化。
利用这种光程的变化,如果使不同方向上前进的光之间产生干涉来测量环路的转动速度,这样就可以制造出干涉式光纤陀螺仪,如果利用这种环路光程的变化来实现在环路中不断循环的光之间的干涉,也就是通过调整光纤环路的光的谐振频率进而测量环路的转动速度,就可以制造出谐振式的光纤陀螺仪。
4.5.4GPX陀螺全站仪的观测方法
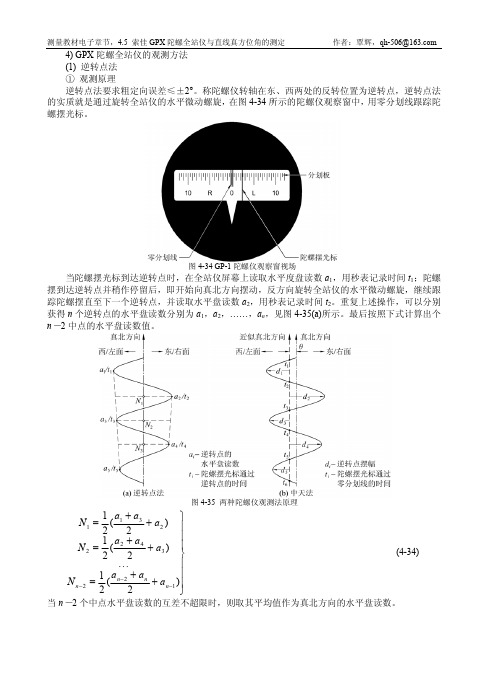
4) GPX 陀螺全站仪的观测方法(1) 逆转点法① 观测原理逆转点法要求粗定向误差≤±2°。
称陀螺仪转轴在东、西两处的反转位置为逆转点,逆转点法的实质就是通过旋转全站仪的水平微动螺旋,在图4-34所示的陀螺仪观察窗中,用零分划线跟踪陀螺摆光标。
当陀螺摆光标到达逆转点时,在全站仪屏幕上读取水平度盘读数a 1,用秒表记录时间t 1;陀螺摆到达逆转点并稍作停留后,即开始向真北方向摆动,反方向旋转全站仪的水平微动螺旋,继续跟踪陀螺摆直至下一个逆转点,并读取水平盘读数a 2,用秒表记录时间t 2。
重复上述操作,可以分别获得n 个逆转点的水平盘读数分别为a 1,a 2,……,a n ,见图4-35(a)所示。
最后按照下式计算出个n -2中点的水平盘读数值。
⎪⎪⎪⎭⎪⎪⎪⎬⎫++=⋅⋅⋅++=++=−−−)2(21)2(21)2(2112234222311n n n n a a a N a a a N a a a N (4-34)当n -2个中点水平盘读数的互差不超限时,则取其平均值作为真北方向的水平盘读数。
图4-34 GP-1陀螺仪观察窗视场图4-35 两种陀螺仪观测法原理2][−=n N N (4-35)逆转点法跟踪时,用秒表记录每个逆转点的通过时间t i 是为了证实陀螺仪工作是否正常和判断是否跟踪到了逆转点并计算跟踪周期,t i 不参与N i 值的计算。
使用SETX 全站仪的陀螺观测程序观测时,逆转点的水平盘读数a i 的记录与N 的计算由程序自动完成。
② GPX 陀螺全站仪操作方法 完成粗定向与陀螺仪启动后,按全站仪键盘的键启动陀螺观测程序,屏幕显示图4-36(a)的界面后进入图4-36(b)的界面,图中数字为望远镜当前视线方向的水平盘读数;按()键选择逆转点法观测,操作过程如下:向→F 方向缓慢旋转锁紧螺旋至H.C 标记位置,使陀螺摆处于半锁紧状态,待陀螺摆运动稳定后(10s),再继续向→F 方向缓慢旋转锁紧螺旋到底,使陀螺摆处于自由悬挂状态,在陀螺仪观察窗中观察陀螺的进动方向和速度,旋转全站仪水平微动螺旋,使零分划线始终与陀螺摆光标重合,当陀螺摆到达逆转点时,按()键,全站仪自动记录逆转点水平盘读数,结果见图4-36(d)所示;反方向旋转水平微动螺旋继续跟踪下一个逆转点,陀螺摆到达该逆转点时,按()键,全站仪自动记录逆转点水平盘读数,结果见图4-36(e)所示;再反方向旋转水平微动螺旋继续跟踪下一个逆转点,陀螺摆到达该逆转点时,按()键,全站仪自动记录逆转点水平盘读数,结果见图4-36(f)所示,重复上述操作可继续跟踪。
深井多中段定向中全站式陀螺仪的应用及精度分析
深井多中段定向中全站式陀螺仪的应用及精度分析郭学均【摘要】文中结合矿山深井多中段同时开拓的实际,应用全站式陀螺仪进行定向,采用一次投点,多中段同时联测,分次测定陀螺方位角的办法,解决了深井多中段定向中的技术难题.对定向结果进行精度分析,为井下首级控制提供了高精度的起始方位.【期刊名称】《矿山测量》【年(卷),期】2017(045)001【总页数】4页(P32-34,58)【关键词】深井多中段;全站式;陀螺仪;陀螺方位角;定向精度【作者】郭学均【作者单位】巴彦淖尔西部铜业有限公司,内蒙古巴彦淖尔 015000【正文语种】中文【中图分类】TD172陀螺仪测定陀螺边方位角不需占用井筒,准备工作简单,一次定向的精度高,完全能满足矿山定向的精度要求。
地球上除两极和高纬度(75°以上)地区外,均可测定地面或井下任一测站的真子午线位置和任意测线的大地方位角。
定向精度不受井筒深度影响,已逐渐成为矿山测量定向工作的首要方法。
高速旋转的陀螺转子有两个特性:(1)在没有外力矩作用下,陀螺旋转轴在宇宙空间的方位保持不变,即定轴性;(2)在外力矩作用下,陀螺旋转轴的方位将必定发生变化,这种促使陀螺旋转轴方位发生变化的运动称为“进动”,即进动性。
陀螺仪就是利用这两个特性以及地球的自转和重力的作用,使陀螺旋转轴围绕子午面往复摆动,从而实现找北,达到定向的目的。
随着经济的高速发展,矿山的规模化、机械化趋势明显,掘进进度日益加快,深井多中段成为许多矿山的开拓常态,这就要求广大矿山测量工作者必须克服传统的几何定向占用井筒而造成停产、耗费大量人力、物力和时间等缺点,利用陀螺仪的优势,解决深井多中段定向中占用井筒时间长、定向精度降低的弊端,使定向精度和工作效率大幅提高,为井下首级控制提供准确的起始方位,保证井巷工程安全高效的施工。
本矿山属于大型矿山,本次定向的副井井筒深度1 100 m,段高60 m,设计生产中段7个,先期开拓上部三个中段和最低中段:1 390 m、1 330 m、1 270 m、1 030 m。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
10
若陀螺仪灵敏部重量为P,且认为是集中作用于重心O1,重心 O1至悬挂点O的距离为1,则此时因地平面绕y轴旋转而引起的 力矩为: MB=Plsinθ=Msinθ
这时x轴进动的角速度为: ωP=(M/H)sinθ
11
6
3、陀螺仪寻北原理
(1) 地球自转及其对陀螺仪的作 用 地球以角速度ωE(ωE=1周/ 昼夜=7.25×10-5rad/s)绕其自转 轴旋转,故地球上的一切东西都 随着地球转动。如从宇宙空间来 看地轴北端,地球是在作逆时针 方向旋转,其旋转角速度的矢量 ωE沿其自转轴指向北端。对纬 度为φ的地面点p而言,地球自 转角速度矢量ωE和当地的水平 面成φ角,且位于过当地的子午 面内。ωE可分解为垂直分量 ω2(沿铅垂方向)和水平分量ω1( 沿子午线方向)。
目 录
概述
陀螺仪的基本原理
陀螺仪的基本结构 陀螺仪定向工作流程 陀螺仪悬带零位观测 粗略定向
精密定向
1
一、概述
陀螺定向是运用陀螺经纬仪直接测定井下未知边的方位角。 它克服了运用几何定向方法进行联系测量时占用井筒时间长、 工作组织复杂等缺点,目前,已广泛应用于矿井联系测量和 控制井下导线方向误差的积累。
12
三、陀螺仪的基本结构
陀螺经纬仪是陀螺仪和经纬仪组合而成的定向仪器。根据其连 接形式不同主要可分为上架式陀螺经纬仪和下架式陀螺经纬仪 两大类。上架式陀螺经纬仪即陀螺仪安放在经纬仪之上,下架 式陀螺经纬仪即陀螺仪安放在经纬仪之下。
现在常用的矿用陀螺经纬仪大都是上架式陀螺经纬仪。
8
(2) 陀螺仪轴对地球的相对运动
9
• 摆式陀螺的进动 当地球旋转时,钟摆式陀螺仪上的悬重 Q 将使主轴 x产生回 到子午面的进动,其关系表示于上图中。当陀螺仪主轴x平 行于地平面的时刻,则悬重Q不引起重力力矩,所以对于x 轴的方位没有影响。但在下一时刻,地平面依角速度ω3绕y 轴旋转,所以地平面不再平行于 x轴,而与之呈某一夹角。 设x轴的正端偏离子午面之东,那么当地平面降落后,观测 者感到的是x轴的正端仰起至地平面之上,并与地平面呈夹 角θ。因而悬重 Q 产生力矩使 x轴的正端进动并回到子午面 方向。反之亦然。
目前,常用的陀螺仪是采用两个完全自由度和一个不完全 自由度的钟摆式陀螺仪。它是根据上述的陀螺仪的定轴性和进 动性两个基本特性,并考虑到陀螺仪对地球自转的相对运动, 使陀螺轴在测站子午线附近作简谐摆动的原理而制成的。
5
如果把自由陀螺仪的重心从中心下移 ,即在自由陀螺仪轴上加以悬重Q, 则陀螺仪灵敏部的重心由中心O下移 到O1点,结果便限制了自由陀螺仪绕 y轴旋转的自由度,亦即x轴因悬重Q 的作用,而永远趋于和水平面平行的 状态。此时它具有两个完全的自由度 和一个不完全的自由度。因为它的灵 敏部和钟摆相似(重心位于过中心的铅 垂线上,且低于中心),所以称为钟摆 式陀螺仪。如果用悬挂带悬挂起来, 陀螺既能绕自身轴高速旋转,又能绕 悬挂轴摆动一可转动的陀螺,右端为一可移动的悬重,当调节 悬重的位臵使杠杆水平时,可以看到陀螺转动后,其轴线的方 向始终保持不变,即可验证定轴性。当将悬重向左移动一小段 距离,即相当于陀螺轴受到一个向下的作用力时,陀螺转动后, 杠杆将保持水平,但将在水平面上作逆时针方向的转动;同理, 将悬重右移一小段距离,即陀螺轴受到一个向上的作用力时, 陀螺转动后,杠杆仍保持水平,但将在水平面上作顺时针方向 的转动,这样即可验证自由陀螺仪的进动性。
• 摆式陀螺的进动与地球自转影响的平衡 由于与地球转动的同时,子午面亦在按地转铅垂分量ω 2 不 断地变换位臵。故即使某一时刻陀螺仪轴与地平面平行且位 于子午面内,但下一时刻陀螺仪轴便不再位于子午面内,因 此陀螺仪轴与子午面之间具有相对运动的形式。当陀螺仪轴 的进动角速度ωP与角速度分量ω2相等时,则陀螺仪轴与仪 器所在地点的子午面保持相对静止。
7
这时角速度矢量ωE应位于OPN上,且向着北极PN那一端。将 ωE分解成互相正交的两个分量ω1和ω2。ω1叫做地球旋转的 水平分量,表示地平面在空间绕子午线旋转的角速度;且地平 面的东半面降落,西半面升起,在地球上的观测者感到就像太 阳和其他星体的高度变化一样。地球水平分量ω1的大小为: ω1=ωEcosφ 分量ω2表示子午面在空间绕铅垂线亦即万向结构 z轴旋转的角 速度,并且表示子午线的北端向西移动。这个分量称为地球旋 转的垂直分量。观测者在地球上感到的正如太阳和其他星体的 方位变化一样。分量ω2的大小为: ω2=ωEsinφ
图3-10陀螺仪定向示意图
15
可以按下式求出仪器常数: △=A0-αT 在下井定向之前,在已知边上测定仪器常数应进行2—3次,各 次之间的互差对于GAK-1、JT15 等型号的仪器应小于40″。 2、在井下定向边上测定陀螺方位角 仪器安臵在C′点上,可以测出C′D′边的陀螺方位角 αT ′ 。则定向边的地理方位角A为:
13
全站式陀螺仪是将陀螺仪安放 在全站仪之上而构成的,其中 陀螺仪部分的基本结构如右图
14
四、陀螺仪定向的作业过程
1、地面已知边上测定仪器常数
假想的陀螺仪轴的稳定位臵通常不与地理子午线重合,二者 之间的夹角称为仪器常数,一般用△表示 。陀螺仪子午线位于 地理子午线的东边△为正;反之为负。
2
二、陀螺仪的基本原理
陀螺经纬仪是根据自由陀螺仪(在不受外力作用时,具有 三个自由度的陀螺仪)的原理而制成的。自由陀螺仪具有以下 两个基本特性:
3
1、定轴性 陀螺轴在不受外力作用时,它的方向始终指向初始恒定方向; 2、 进动性
陀螺轴在受到外力作用时,将产生非常重要的效应——“进动”。 自由陀螺仪的上述两个特性,可通过以下实验予以证明。