基于MATLAB的DSPace快速控制原型开发系统
dSPACE使用手册
2
dSPACE—实时快速原型及硬件在回路仿真的一体化解决途径 .................... 7
2.1 RCP(Rapid Control Prototyping)—快速控制原型...................................................... 7 2.2 HILS(Hardware-in-the-Loop Simulation)—硬件在回路仿真 .................................... 8 2.3 用 dSPACE 进行控制系统开发........................................................................................ 9 2.4 建立用户 dSPACE 系统.................................................................................................. 12
dspace配置的优缺点比较
dSPACE*** 基于Matlab/Simulink平台***实时快速原型及硬件在回路仿真的一体化解决途径1概述在当今社会,市场对产品的需求呈现多样性、快速性的趋势,这就使企业的新品开发面临着多样性需求与快速开发之间的矛盾;同时对控制系统鲁棒性及可靠性的要求也日益增加;另外并行工程(即:设计、实现、测试和生产准备同时进行)被提上了日程。
DSPACE 的产品为并行工程的实现创造了一个良好的环境。
对于进行控制算法研究的工程师而言,最头疼的莫过于没有一个方便而又快捷的途径,可以将他们用控制系统设计软件 (如MATLAB/Simulink) 开发的控制算法在一个实时的硬件平台上实现,以便观察与实际的控制对象相连时,控制算法的性能;而且,如果控制算法不理想,还能够很快地进行反复设计、反复试验直到找到理想的控制方案。
对一些大型的科研应用项目,如果完全遵循过去的开发过程,由于开发过程中存在着需求更改,软件代码甚至代码运行硬件环境不可靠(如:新设计制造的控制单元存在缺陷)等问题,最终导致项目周期长、费用高,缺乏必要的可靠性,甚至还可能导致项目以失败告终。
这就要求在开发的初期阶段就引入各种试验手段,并有可靠性高的实时软/硬件环境做支持。
另外,当产品型控制器生产出来后,测试工程师又将面临一个严重的问题。
由于并行工程的需求,控制对象可能还处于研制阶段,或者控制对象很难得到,用什么方法才能在早期独立地完成对控制器的测试呢?我们将这些问题概括为两种:快速控制原型(RCP)和硬件在回路仿真(HILS)。
d SPACE 提供了这两方面应用的统一平台。
2Dspace介绍dSPACE实时仿真系统是由dSPACE公司开发的一套基于MA TLAB/Simulink的控制系统开发及测试的工作平台,实现了和MATLAB/Simulink的完全无缝连接。
dSPACE实时系统拥有具有高速计算能力的硬件系统,包括处理器、I/O等,还拥有方便易用的实现代码生成/下载和试验/调试的软件环境。
(完整版)DSPACE应用简介

(完整版)DSPACE应⽤简介dSPACE 实时仿真平台软件环境及应⽤⼀、dSPACE 简介dSPACE实时仿真系统是由德国dSPACE公司开发的⼀套基于MATLAB/Simulink 的控制系统在实时环境下的开发及测试⼯作平台,实现了和MATLAB/Simulink 的⽆缝连接。
dSPACE 实时系统由两⼤部分组成,⼀是硬件系统,⼆是软件环境。
其中硬件系统的主要特点是具有⾼速计算能⼒,包括处理器和I/O 接⼝等;软件环境可以⽅便地实现代码⽣成/下载和试验调试等⼯作。
dSPACE 具有强⼤的功能,可以很好地完成控制算法的设计、测试和实现,并为这⼀套并⾏⼯程提供了⼀个良好的环境。
dSPACE 的开发思路是将系统或产品开发诸功能与过程的集成和⼀体化,即从⼀个产品的概念设计到数学分析和仿真,从实时仿真实验到实验结果的监控和调节都可以集成到⼀套平台中来完成。
dSPACE 的软件环境主要由两⼤部分组成,⼀部分是实时代码的⽣成和下载软件RTI(Real-Time Interface),它是连接dSPACE 统与MATLAB/Simulink 纽带,通过对RTW(Real-Time Workshop)进⾏扩展,可以实现从Simulink 模型到dSPACE 实时硬件代码的⾃动下载。
另⼀部分为测试软件,其中包含了综合实验与测试环境(软件)ControlDesk、⾃动试验及参数调整软件MLIB/MTRACE、PC 与实时处理器通信软件CLIB 以及实时动画软件RealMotion 等。
⼆、dSPACE的优点dSPACE 实时仿真系统具有许多其它仿真系统具有的⽆法⽐拟的优点:1、dSPACE 组合性很强。
2、dSPACE 的过渡性和快速性好。
由于dSPACE 和MATLAB 的⽆缝连接,使MATLAB ⽤户可以轻松掌握dSPACE 的使⽤,⽅便地从⾮实时分析、设计过渡到实时的分析和设计上来,⼤⼤节省了时间和费⽤。
3、性能价格⽐⾼。
如何在Matlab中进行快速原型设计
如何在Matlab中进行快速原型设计在现代科技发展的浪潮中,快速原型设计成为了各个领域的重要一环。
它可以帮助我们迅速验证和评估新想法,从而更快地优化和改进我们的产品和服务。
而在计算机科学领域中,Matlab作为一种强大的数学计算和数据分析工具,提供了便捷的开发环境和丰富的函数库,使得快速原型设计变得更加简单和高效。
本文将介绍如何在Matlab中进行快速原型设计,并分享一些实用的技巧和工具。
1. 确定需求和目标在开始任何项目之前,首先需要明确我们的需求和目标。
快速原型设计的目的是验证新想法的可行性和有效性,因此我们需要明确我们的研究问题、假设和预期结果。
这些明确的目标将帮助我们选择合适的方法和工具,并指导我们整个原型设计过程。
2. MatLab环境准备在使用Matlab进行快速原型设计之前,我们需要准备一个合适的开发环境。
首先,确保我们有最新版本的Matlab安装在我们的计算机上。
然后,检查我们是否有所需的工具箱和函数库,如图像处理工具箱、机器学习工具箱等。
如果我们没有这些工具箱,可以通过Matlab官方网站或额外的第三方资源获得。
3. 数据处理与分析在快速原型设计中,数据处理和分析是至关重要的环节。
Matlab提供了丰富的数据处理和分析函数,可以帮助我们快速处理和分析数据,从而获得有价值的信息和结论。
例如,我们可以使用Matlab中的统计工具箱对数据进行描述性统计、假设检验和回归分析等。
此外,Matlab还支持可视化数据的各种方法,如绘制直方图、散点图和线图等,以便更好地理解和解释数据。
4. 图像和信号处理在许多项目中,图像和信号处理是不可或缺的一步。
Matlab提供了许多强大的图像和信号处理函数,使得这个过程变得简单而高效。
例如,我们可以使用Matlab中的图像处理工具箱进行图像增强、图像分割和目标检测等。
此外,我们还可以使用Matlab中的信号处理工具箱进行滤波、频谱分析和语音识别等。
这些工具极大地加速了我们的原型设计过程,并提供了准确的结果。
基于dSPACE的电机控制系统实验平台研究
基于dSPACE的电机控制系统实验平台研究作者:郎宝华,杨建华,李榕来源:《现代电子技术》2010年第17期摘要:通常电机控制实验采用以微控制器如DSP为控制核心来进行硬件平台搭建和软件控制算法编程,但该方法存在费时费力的缺点,因此提出利用dSPACE和Matlab/Simulink进行电机控制实验的方法,该方法免去常规方法的软件编程的步骤,节省了大量时间,且更改控制算法灵活。
叙述基于dSPACE的电机控制系统实验平台的搭建过程和开发步骤,最后给出了应用实例。
关键词:dSPACE; Matlab/Simulink; 实验平台; 控制算法中图分类号:TN710-33文献标识码:A文章编号:1004-373X(2010)17-0130-03Study on Experiment Platform of Motor Control System Based on dSPACELANG Bao-hua1, YANG Jian-hua1, LI Rong2(1.School of Electro nic & Information Engineering, Xi’an Technological University, Xi’an 710032, China;2.Oil Marketing Companies in Northwest China, Urumqi 830068, China)Abstract: Usually the hardware platform and software controlling arithmetics are based on a MCU such as DSP when an experiment of motor control is performed, but it has the defects of long time and hard ado. Hence a method of experiment of motor control system using dSPACE and Matlab/Simulink is proposed and this method needn't software programming so saves a lot of time, moreover controlling arithmetics can be modified neatly. The setting processes and steps of experiment platform of motor control system are discussed in detail and then an application example is given in paper.Keywords: dSPACE; Matlab/Simulink; experiment platform; controlling arithmetics0 引言在通常以微控制器如DSP为控制核心进行电机控制系统的实验开发过程中,由于要编写大量的程序代码而需要大量的编程时间,而且如果控制系统算法需要更改或增加则又需较多时间来更改软件,因此实验开发周期长,不利于控制算法的研究和实际应用。
dSPACE电机控制平台的设计与矢量控制实现
dSPACE电机控制平台的设计与矢量控制实现孙红飞;王乐英【摘要】Generally, the mathematical model of a motor is a nonlinear, multivariable and strong coupling system. It is diffi-cult to obtain ideal results by simply applying offline-simulated algorithm to practical application. By using seamless intercon-nection technology between dSPACE and Simulink, a transition from offline simulation to hardware in-the-loop simulation is realized rapidly, and research work of motion control system can be much more effective. This paper introduces dSPACE soft-ware and hardware environment, designs translation circuit from dSPACE to main drive, and builds a motor control experi-ment platform. Finally, stator-flux-oriented vector control strategy for asynchronous motor is realized in this platform, which validates its high efficiency.%电机的数学模型一般较复杂,离线仿真出来的算法在实际应用中较难得到理想的结果.利用dSPACE与Simulink无缝连接技术,可以实现离线仿真到半实物仿真的快速过渡,提高运动控制系统研究工作的效率.本文介绍了dSPACE的软硬件环境,设计出dSPACE到主驱动的转接电路,并完成电机控制实验平台的搭建;最后在此平台上实现了异步机定子磁链定向的矢量控制,验证了实验平台的高效性.【期刊名称】《天津理工大学学报》【年(卷),期】2011(027)004【总页数】4页(P16-19)【关键词】dSPACE;电机控制平台;半实物仿真;矢量控制【作者】孙红飞;王乐英【作者单位】天津大学电气与自动化工程学院,天津300072;天津大学电气与自动化工程学院,天津300072【正文语种】中文【中图分类】TM306电机的数学模型一般是高阶、非线性的多变量系统,离线仿真得到的控制算法在实际应用中不容易取得理想效果;而在采用单片机或DSP的硬件环境中开发运动控制系统需要手工编程,工作量大、不灵活、开发效率低[1].dSPACE(digital Signal Processing and Control Engineering)一套基于Matlab/Simulink的半实物仿真平台,它由硬件系统和软件环境两部分组成[2-4].本文所用的dSPACE硬件是单板系统dS1103,它包括处理器和I/O接口等[4].软件环境也有两部分,一是用来自动生成代码的软件 RTI(Real Time Interface),是dSPACE和Simulink的连接桥梁;二是调试软件ControlDesk,用来对系统的参变量及运行状态进行实时的监视和调整[4-5].将dSPACE用在运动控制系统的开发研究中,可以实现快速控制原型RTP(Rapid Control Protocol)驱动实际电机进行硬件在环仿真,并能灵活的完成算法的调试和更改,具有很高的效率.1 实验平台的整体规划实验平台的总体规划如图1.首先用计算机搭建出Simulink系统模型进行离线仿真,将模型中的相关模块换作RTI接口模块并将自动生成的代码下载入dSPACE;通过转接电路输出6路PWM信号控制主板IGBT从而驱动电机运转;检测环节用来检测电机状态(转速、电流等),通过转接电路调理后送还dSPACE做运算形成控制回路.在整个半实物仿真过程中,在计算机中利用ControlDesk软件与实时控制器进行交互操作,如调整控制参数,显示控制系统的状态、跟踪进程响应曲线等[4].另外平台还应具有通用性,以满足对各种电机的各种算法的研发.因此在设计的时候,实验平台扩展出了足够多的A/D口、数字I/O口、转速检测口和通信接口等. 图1 实验平台总体规划及转接电路功能示意图Fig.1 Overall plan of experiment platform and function diagram of translation circuit2 转接电路板设计转接电路板是整个实验平台的关键.参考图1,它向上与dSPACE进行信号交换,向下与主板进行信号交换,主板主要实现功率驱动作用.转接电路板应该具备以下主要功能:1)设计双电源变换模块,可选择用dSPACE或外部电源为此电路板及传感器供电.2)实现dSPACE与电机驱动主板的信号连接.3)对dSPACE输出信号进行调理.dSPACE的PWM输出口是高电平有效,且上电便为有效电平,若这样直接驱动IGBT便会出现直通而烧掉驱动模块.4)对电机电流、转速及IGBT直流母线电压进行检测和调理.5)产生过流、过压、欠压等故障信号,并对故障信号进行硬件响应及锁存上报.根据上述功能要求,本文在设计时使用模块化的设计方法,即把电路划分为各功能块分别予以实现,这样可使转接电路更加条理化,具有更高的维护性.转接电路分为:信号检测调理功能块、PWM输出功能块、电源功能块、dSPACE信号交换功能块、故障信号产生功能块及信号锁存上报功能块,如图1所示.从总的角度来看,这些功能模块可分为模拟和数字块,如图2所示.模拟块主要包括电流电压的检测处理部分,数字块主要实现故障信号锁存上报及PWM信号处理等功能.图2 dSPACE与转接板的信号传递示意图Fig.2 Signal transmitting diagram between dSPACE and translation circuit平台采用霍尔传感器检测电压、电流,采用增量式光电编码器检测转速.转接板对电流、电压信号的调理是实现放大、偏置、滤波和钳位;故障信号的产生通过比较器实现,电路设计相对较为简单.故障信号响应及锁存上报决定了整个实验平台的可靠性和容错性,下面以过流故障为例给出故障保护功能块的工作流程.正常工作时,由dSPACE提供的清锁存信号为低电平.当过流故障产生时,过流故障信号传给图3中对应的RS触发器.此RS触发器会产生两个作用:一是五输入与门的输出被置0,PWM信号立即被封锁并同时向dSPACE申请中断;二是过流故障上报信号被置1以通知dSPACE有过流故障信号产生.假设此时过流故障消失,过流故障信号还原为高电平,这时RS触发器的输出会仍然保持原有状态,实现锁存功能.要清除故障锁存状态必须通过dSPACE提供的清锁存信号来实现.清锁存信号高电平有效,清锁存信号来时,五输入与门的输出翻转为1,PWM信号保持封锁状态;如果这时所有故障都不存在,RS触发器输出的故障上报信号将被清零,即故障锁存状态被清除;这时还原清锁存信号为低电平,PWM封锁被清除,系统恢复正常运转.此逻辑电路在转接板上用可编程芯片GAL16V8实现.图3 故障保护工作原理图Fig.3 Functional scheme of fault protection转接电路板实现之后,将各部件按图1连接起来,整个实验平台的搭建工作便完成了,如图4,其中主驱动的原边是由一个直流电源柜供电.图4 dSPACE电机控制实验平台Fig.4 Motor control experiment platform based on dSPACE3 实验平台矢量控制实现矢量控制是基于坐标变换的一种控制策略,经过旋转变换及磁链定向,将高阶、非线性、强耦合的异步电机动态数学模型简化为可用两路直流分别对磁链和转矩进行控制的解耦模型,因具有良好的动态性能而被广泛应用在电机控制领域.本文在搭建好的实验平台上实现异步机的矢量控制,以验证平台在运动控制系统研发上的高效性.算法控制过程.将测量得到的三相定子和转子电流送入磁链得到定子磁链幅值、角度;将磁链给定值和观测器测量值相比较、转速给定值和测量值相比较,误差经过磁链和转速PI调节器后分别作为励磁电流和转矩电流内环调节器的给定值;将定子电流转换到定子磁链定向的同步坐标系下,得到励磁电流和转矩电流;励磁电流及转矩电流与给定值的误差经内环电流调节器输出,结果经2/3变换到静止坐标系后作为定子电压驱动电机.3.1 电机参数实验用的电机为绕线异步机.电机铭牌数据:额定功率3.7 kw,额定频率50 Hz;定子Y接额定电压380 V,额定电流9.2 A;转子Y接,额定电压185 V,额定电流14.5 A;电机额定转速908 r/min,3对极.经堵转和空载实验,测得电机相关参数:定子电阻1.71 A、自感0.13 H、互感0.125 H;转子电阻1.42 Ω、自感0.13 H、互感 0.125 H.3.2 实验环境控制算法采用定子磁链定向矢量控制,内环为励磁和转矩电流环,外环为转速环,磁链模型采用代数模型.主驱动PWM逆变器直流侧母线电压200 V,调制频率10 kHz、死区3μs;内环PI参数为k p=30、k1=0;外环 PI参数为 k p=0.15、kl=0.02;转速给定±300 r/min矩形波;励磁电流6 A;转矩电流限幅.3.3 实验结果在Simulink中搭建出系统模型进行离线仿真,将模型中相关模块换为RTI模块并生成实时代码下载入dSPACE,此时整个系统开始运行.在dSPACE软件环境ControlDesk中自定义搭建出上位机界面如图5和图6.图5中显示:系统运行状态(包括过流、过压、欠压等故障状态);急停和清锁存按钮;可以实时更改的电流、转速调节器PI参数;转速及转速跟踪给定波形.图6中显示:三相定子电流波形;三相转子电流波形;转矩电流跟踪给定波形.图5 监控界面Fig.5 M onitoring interface图6 电机定子、转子、转矩电流Fig.6 M otor currents of stator,rotor and torque图5 表明在矢量控制算法下,转速(绿色)可以较好的跟踪给定(红色).在转速给定阶跃改变时实际转速呈直线跟踪给定,这表明在此过程中转矩电流一直保持限幅值(转速曲线的斜率与转矩大小对应)以取得最少的跟踪时间,这从图6中的转矩电流跟踪波形中也可以看出.图6显示出在电机运行稳态和转速给定突变时定子电流和转子电流的波形,可以看出矢量控制具有优良的动态性能.图中的电流和转速均为实测值.4 结论本文介绍了dSPACE在运动控制系统研发中的优势,设计出较完善的转接电路并完成了基于dSPACE的电机控制实验平台搭建,最后通过实现对异步机的定子磁链定向矢量控制验证了平台在开发调试新算法上的高效性.dSPACE充当快速控制原型,直接对实物进行实时仿真控制,控制算法及控制参数可随时调整,仿真结果可与实际控制系统相媲美.在此平台上基本可以实现对各种电机的各种控制算法的研发和测试,在以后实际运用的过程中可能不可避免的会发现各种问题,相信经过进一步的改进,此平台会逐渐完善,发挥应有的作用.参考文献:[1]宋科,刘卫国,骆光照.控制系统硬件在回路实时仿真实验平台的 dSPACE实现[J].微特电机,2008,36(4):28-31.[2]Shu Yan,Li Hui,Wu Qian.Expansion application of dSPACE forHILS[C]//Industrial Electronics,Cambridge,2008:2231-2235.[3]ZWang,J Zhang,X Luo.Research and Realization of Hardware-in-the-loop simulation platform based on Vxworks[J].Computer Engineering,2007,14:155-158.[4]马培蓓,吴进华,纪军,等.dSPACE实时仿真平台软件环境及应用[J].系统仿真学报,2004,16(4):667-670.[5]薛定宇.控制系统仿真与计算机辅助设计[M].北京:机械工业出版社,2005.。
Dspace--Canoe--Stateflow三种软件的比较及所用领域分析
Dspace Canoe Stateflow三种软件的比较20年前,dSPACE开启了实时控制系统的先河,吸引了全球无数的眼光,今天的dSPACE已经成为开发和测试机械控制系统工程的市场领导者。
dSPACE(digital SignalProcessing And Control Engineering)实时仿真系统是由德国dSPACE公司开发的一套基于MAT-LAB/Simulink的辅助系统开发及半实物仿真的软硬件工作平台,实现了和MATLAB/Simulink/RTW的完全无缝连接,使得控制器的仿真模型和算法能够通过dSPACE应用于伺服控制器的开发。
1.1 dSPACE的功能特点dSPACE实时系统由两部分组成,一是硬件系统,二是软件环境。
Dspace 的软件环境主要由两大部分组成,一部分是实时代码的生成和下载软件RTI(Real 一TimenIetarfec),它是连接dSAPCE实时系统与Matlab/simulink纽带,通过对RTW(Real一TimeWorkshop)进行扩展,可以实现从simulnik模型到dSAPCE实时硬件代码的自动下载。
另一部分为测试软件,其中包含了综合实验与测试环境(软件)ControlDesk、自动试验及参数调整软件MUB/MTRACE、PC与实时处理器通信软件CUB以及实时动画软件RealMotion等。
硬件系统主要分两大类:一是把处理器和I/O集成到一个板子上,形成一个完整的实时仿真系统的单板系统;二是将实时处理器和用户接口完全分开,以实现处理器能力和I/O能力的自由扩展,处理器和I/O之间通信由PHS(PeriPheral High一Speed Bus)总线实现的标准组件系统。
dSAPCE实时仿真系统具有许多其它仿真系统具有的无法比拟的优点:dSAPCE组合性很强、dSAPCE的过渡性和易于掌握和使用、对产品实时控制器的支持性强、快速性好、性能价格比高、实时性好、可靠性高、灵活性强。
dSPACE的资料——非常好用

,dSPACE*** 基于Matlab/Simulink平台***实时快速原型及硬件在回路仿真的一体化解决途径恒润科技有限公司2004年6月目录1概述 (1)2dSPACE—实时快速原型及硬件在回路仿真的一体化解决途径 (1)2.1RCP(Rapid Control Prototyping)—快速控制原型 (1)2.2HILS(Hardware-in-the-Loop Simulation)—硬件在回路仿真 (1)2.3用dSPACE进行控制系统开发 (1)2.4建立用户dSPACE系统 (1)3dSPACE体系结构 (1)3.1dSPACE软件 (1)3.1.1代码生成及下载软件(Implementation Software) (1)3.1.1.1代码的生成过程 (1)3.1.1.2MATLAB/Simulink-现代控制设计平台 (1)3.1.1.3RTI(Real-Time Interface)-从方框图自动生成代码并下载 (1)3.1.1.4PPC编译器 (1)3.1.2实验软件(Experiment Software) (1)3.1.2.1ControlDesk综合实验环境 (1)3.1.2.2MLIB和MTRACE—实现自动试验及参数调整 (1)3.1.2.3MotionDesk—实时动画 (1)3.1.2.4CLIB---PC与实时处理器通讯 (1)3.1.2.5AutoMationDesk-自动化测试工具 (1)3.1.3TargetLink-产品级代码的生成 (1)3.2dSPACE硬件 (1)3.2.1智能化的单板系统 (1)3.2.1.1DS1103 PPC 控制器板 (1)3.2.1.2DS1104 PPC 控制器板 (1)3.2.2标准组件系统 (1)3.2.2.1处理器板(Processor Boards) (1)3.2.2.1.1处理器板概述(总线和中断) (1)3.2.2.1.2DS1005 PPC板-处理器POWER PC750FX,800MHz (1)3.2.2.1.3DS1006 PPC板-处理器X86处理器,2.2GHz (1)3.2.2.2I/O板 (1)3.2.2.2.1简单A/D和D/A转换 (1)3.2.2.2.2Multi-I/O (1)北京恒润科技有限公司 13.2.2.2.3增量编码器接口 (1)3.2.2.2.4定时及数字I/O (1)3.2.2.2.5复杂模拟信号及阻型传感器 (1)3.2.2.2.6其它I/O (1)3.2.2.2.7DS2211 HIL I/O板 (1)3.2.2.3附件(Accessories) (1)3.2.2.3.1大系统扩展盒PX10/PX20 (1)3.2.2.3.2接插键指示灯面板 (1)3.2.2.3.3DS830连接缓冲器板-连接远距离系统 (1)3.2.3汽车内置系统 (1)3.2.3.1AutoBox-汽车内置试验扩展箱 (1)3.2.3.2MicroAutoBox-车辆快速测试控制原型系统的最佳选择 (1)4应用实例 (1)4.1机器人新型控制原理测试--用μ-综合与分析法控制机械手 (1)4.2驱动方面的应用-验证ASIC控制器原理 (1)4.3机械工程方面的应用—Achenbach Buschhüten 平面度控制 (1)4.4航空航天方面的应用—Simona开发飞行仿真器 (1)4.5汽车的硬件在回路仿真—ABS控制器测试试验台 (1)4.6电力电子方面的应用-机车驱动系统硬件在回路仿真 (1)4.7ECU开发应用-菲亚特公司开发ERG控制器 (1)4.8DaimlerChrysler开发主动悬架 (1)4.9Delphi利用Targetlink进行电控产品开发 (1)4.10Audi公司动力传动系统HIL仿真测试 (1)4.11DS2302、DS4002的应用实例 (1)附录1—I/O板技术特性 (1)附录2—dSPACE对计算机软件及硬件的要求 (1)北京恒润科技有限公司 21概述在当今社会,市场对产品的需求呈现多样性、快速性的趋势,这就使企业的新品开发面临着多样性需求与快速开发之间的矛盾;对控制系统鲁棒性及可靠性的要求也日益增加;并行工程(即:设计、实现、测试和生产准备同时进行)被提上了日程。
基于MATLAB的控制系统设计与仿真实践

基于MATLAB的控制系统设计与仿真实践控制系统设计是现代工程领域中至关重要的一部分,它涉及到对系统动态特性的分析、建模、控制器设计以及性能评估等方面。
MATLAB作为一种强大的工程计算软件,在控制系统设计与仿真方面有着广泛的应用。
本文将介绍基于MATLAB的控制系统设计与仿真实践,包括系统建模、控制器设计、性能评估等内容。
1. 控制系统设计概述控制系统是通过对被控对象施加某种影响,使其按照既定要求或规律运动的系统。
在控制系统设计中,首先需要对被控对象进行建模,以便进行后续的分析和设计。
MATLAB提供了丰富的工具和函数,可以帮助工程师快速准确地建立系统模型。
2. 系统建模与仿真在MATLAB中,可以利用Simulink工具进行系统建模和仿真。
Simulink是MATLAB中用于多域仿真和建模的工具,用户可以通过拖拽图形化组件来搭建整个系统模型。
同时,Simulink还提供了各种信号源、传感器、执行器等组件,方便用户快速搭建复杂的控制系统模型。
3. 控制器设计控制器是控制系统中至关重要的一部分,它根据系统反馈信息对输出信号进行调节,以使系统输出达到期望值。
在MATLAB中,可以利用Control System Toolbox进行各种类型的控制器设计,包括PID控制器、根轨迹设计、频域设计等。
工程师可以根据系统需求选择合适的控制器类型,并通过MATLAB进行参数调节和性能优化。
4. 性能评估与优化在控制系统设计过程中,性能评估是必不可少的一环。
MATLAB提供了丰富的工具和函数,可以帮助工程师对系统进行性能评估,并进行优化改进。
通过仿真实验和数据分析,工程师可以评估系统的稳定性、鲁棒性、响应速度等指标,并针对性地进行调整和改进。
5. 实例演示为了更好地说明基于MATLAB的控制系统设计与仿真实践,我们将以一个简单的直流电机速度控制系统为例进行演示。
首先我们将建立电机数学模型,并设计PID速度控制器;然后利用Simulink搭建整个闭环控制系统,并进行仿真实验;最后通过MATLAB对系统性能进行评估和优化。
基于DSP的快速控制原型系统
基于DSP的快速控制原型系统方正;张淇淳;齐玉成【期刊名称】《东北大学学报(自然科学版)》【年(卷),期】2009(030)008【摘要】为了在实际控制系统开发中缩短控制算法的设计周期,提高控制器的可靠性,并简化在调试过程中对控制算法的修改,设计与开发了基于DSP的快速原型控制系统.该系统包括基于TI F2812DSP的硬件控制器和基于MATLAB/Simulink的软件开发环境.用户可以在Simulink环境中利用RTW功能直接从Simulink模型自动生成可执行代码,并下载到DSP控制器中进行实时控制,从而降低了开发人员繁重的编程任务,提高了控制系统开发的效率.通过带有神经网络补偿和前馈补偿的智能PD控制器的实时控制实验,验证了系统的有效性.【总页数】5页(P1069-1073)【作者】方正;张淇淳;齐玉成【作者单位】东北大学,流程工业综合自动化教育部重点实验室,辽宁,沈阳,110004;东北大学,流程工业综合自动化教育部重点实验室,辽宁,沈阳,110004;东北大学,流程工业综合自动化教育部重点实验室,辽宁,沈阳,110004【正文语种】中文【中图分类】TP273.5【相关文献】1.dSPACE 快速控制原型在十五相感应电动机驱动系统中的应用研究 [J], 王路;胡安;李卫超;滕方宏2.基于dSPACE快速控制原型的驱动电机控制研究 [J], 王建强;赵津;甯油江3.基于dSPACE的无人机飞行控制系统快速原型设计 [J], 沈永建;陈欣4.基于DSP快速原型控制的道路模拟振动台控制系统 [J], 沈刚;黄其涛;何景峰;丛大成;韩俊伟;皮亚东5.基于DSP快速原型的淀粉生产线串级控制系统 [J], 沈刚;黄其涛;何景峰;丛大成;白晓东;韩俊伟因版权原因,仅展示原文概要,查看原文内容请购买。
现代控制系统分析与设计——基于matlab的仿真与实现

现代控制系统分析与设计——基于matlab的仿真与实现随着现代科技的不断发展,越来越多的技术应用到现代控制系统中,而控制系统的分析与设计更是一项复杂的技术。
为了更好地实现现代控制系统的分析与设计,计算机技术尤其是基于Matlab的计算机仿真技术在现代控制系统分析与设计中已发挥着越来越重要的作用。
本文旨在介绍基于Matlab的仿真技术,总结它在现代控制系统分析与设计中的应用,为研究者们提供一个思考Matlab技术在现代控制系统分析与设计中的可能性的契机。
Matlab是当今流行的科学计算软件,它的设计特别适合进行矩阵运算和信号处理等工作,可以有效地处理大量复杂的数字信息,因此成为现代计算机技术应用于控制系统分析和设计的重要工具。
基于Matlab的仿真技术主要用于建立控制系统的动态模型,分析系统的特性,评估系统的性能,模拟系统的行为,确定系统的参数,优化系统的性能。
基于Matlab的仿真技术已被广泛应用于现代控制系统的设计中。
首先,基于Matlab的仿真技术可以有效地提高系统设计的效率。
通过实现对控制系统的动态模型建模,可以快速搭建出真实系统的模拟系统,并可以使用计算机来模拟系统行为,可以有效地缩短控制系统设计的周期。
其次,基于Matlab的仿真技术可以有效地改善系统设计质量。
通过分析模拟系统的行为,可以寻找更合理的解决方案,从而改善系统设计的质量。
第三,基于Matlab的仿真技术可以有效地确定系统参数。
通过在模拟系统中添加不同参数,并通过对系统模拟行为的分析,可以确定使系统更加有效的参数组合。
最后,基于Matlab的仿真技术可以有效地优化系统性能。
通过对系统行为的分析,可以识别出系统存在的问题,并设计相应的优化策略,从而实现系统性能的最佳化。
综上所述,基于Matlab的仿真技术在现代控制系统分析与设计中发挥着重要的作用,不仅可以提高系统设计的效率,而且可以改善系统设计的质量,确定系统参数,优化系统性能。
可模拟绕组内部故障的双馈风力发电半实物实时仿真平台
可模拟绕组内部故障的双馈风力发电半实物实时仿真平台魏书荣;王健;张路;高瑾;黄苏融【摘要】双馈风力发电机(DFIG)系统控制复杂,离线仿真与传统全实物的故障试验存在一定局限性.在控制功能强大的MATLAB/Simulink环境下构建基于dSPACE1007系统的双馈风力发电系统半实物实时仿真平台,解决可模拟绕组内部故障的实物电机、dSPACE与Simulink软件三方联调时的数据接口与控制问题.试验结果表明,该平台在DFIG定、转子匝间短路故障工况下,通过Control Desk界面可灵活改变控制参数及算法,实现电机绕组内部故障状态下的容错运行,为DFIG 故障检测和容错控制研究提供硬件平台.%The control of doubly fed induction generator (DFIG) was complicated.Off-line simulation and traditional fullsubstantial fault experiments had their limitations.A semi-substantial real-time platform of doubly fed wind generation based on dSPACE1007 was constructed in the environment of powerful MATLAB/Simulink.Data interface and control of debugging motors with winding faults,dSPACE and Simulink software together were solved.The experimental results indicated that the platform funtion well in the working condition of stator or rotor winding interrnal faults through changing control parameters and algorithms by control Desk,which provided hardware platforms for fault detective and fault tolerance of DFIG.【期刊名称】《电机与控制应用》【年(卷),期】2017(044)005【总页数】6页(P102-107)【关键词】双馈风力发电机;绕组内部故障;半实物实时仿真【作者】魏书荣;王健;张路;高瑾;黄苏融【作者单位】上海电力学院电气工程学院,上海200090;上海电力学院电气工程学院,上海200090;上海电力学院电气工程学院,上海200090;上海大学机电工程与自动化学院,上海200072;上海大学机电工程与自动化学院,上海200072【正文语种】中文【中图分类】TM301.2双馈风力发电机(Doubly Fed Induction Generator,DFIG)是目前风力发电机主要机型之一,定、转子均可以与电网交换能量,兼具同步发电机和异步发电机特性,具有功率灵活可调、变频器功率小等优点。
硬件在环仿真系统概述

硬件在环仿真系统概述邹祎【摘要】In contrast with traditional simulation method of ECU, Hardware-in-Loop simulation has advantages of high real-time, lowcost, high flexibility, high accuracy of simulation. This paper introduces basic principle of HIL simulation and HIL simulation platform of dSPACE, RT-LAB and NI. This paper illustrates developing procedure of HIL simulation model and overview of HIL developing condition.%与传统的ECU仿真方法相比,硬件在环仿真具有高实时性、低成本、灵活性高、可重构性强、仿真精度高等优点。
本文介绍了硬件在环仿真基本原理及dSPACE、RT-LAB、NI硬件在环仿真平台,并阐述了硬件在环仿真模型的开发步骤,对硬件在环仿真当前的发展情况进行了简单概述。
【期刊名称】《价值工程》【年(卷),期】2016(035)035【总页数】2页(P97-98)【关键词】数据挖掘;模型与算法;应用发展方向【作者】邹祎【作者单位】装甲兵工程学院控制工程系,北京100072【正文语种】中文【中图分类】TJ811硬件在环仿真是以实时处理器运行仿真模型来模拟受控对象的运行状态,通过I/O 接口与被测对象相连接。
硬件在环仿真在电子控制单元的研发过程中占据着越来越重要的地位,它提供了一种成本低、可重构性高、安全性高、灵活高效的仿真方法,能减少实车试验的次数,缩短开发时间。
硬件在环仿真系统是由处理器模板与外围I/O板通过ISA总线构成的多处理器系统。
基于dSPACE的实时控制系统设计

万方数据
2010.11 I机电一体化翩
基于dSPACE的实时控制系统设计iI—I I—_—_———I—I——IIIII——III—————II———IIIIII——一————————I————蕊II
一暑要趟番一避林.蝾如昌}.翊一鳋粗毯蜃
●一 ■
0l
2 3 4 5 6 7 8 9 10 ll 12 13 14
∞机电一体化I 2010.”
万方数据
I———i蔷i 磊iiiiiiiiiiiiiiiiii—l liii——I I—————I N—I——————IIII—ii—l l—l l—l——II
Application·Communication
态误差逐渐变小。但积分作用太强,系统超调相应加 大,积分作用过大会导致系统出现振荡。如图7所示, 当K:=200时,系统的超调量约为3%。而当Ki=300 时,超调阜=约为7%。两者的稳态误差均小于l%,故取 定K;=200。
作为仿真系统的一个环节,直接与控制器相连,无需用 户建立被控对象的数学模型和传递函数。Simulink编 写的仿真程序直观易懂,用户能实时修改算法,调整控 制参数,且能与dSPACE实现无缝连接。
控制算法框图如图3所示。ENC—POS模块和DAC 模块从dSPACE系统提供的模块库中直接获取,实现与 电机驱动器的通讯功能。本文中,在驱动器中实现速 度环和电流环,控制器实现位置环。ENC—POS模块对 编码器接口获得的光栅尺反馈信号进行处理,输出位 置脉冲计数和速度差分信号。由参考位置信号与反馈 位置信号相减得到的位置偏差,经过PID控制器,斜率 限制模块和抗饱和模块后,计算得到相应的0—10 V模 拟量,经由DAC模块输出,传送给驱动器,控制电机运 动。其中,斜率限制模块防止控制信号变化过快对系统 造成损害,抗饱和模块限制控制信号在0一lo V范围内。
cSPACE快速控制原型
基于MATLAB的DSP快速控制原型开发系统一.产品简介 ............................................. 1..二.系统组成 .............................................. 2.三.硬件资源 .............................................. 4.四.应用案例 .............................................. 6.4.1. 直线电机驱动的二级倒立摆的控制 (6)4.2. 磁悬浮球系统的控制 (8)4.3. 三容水箱过程控制实验系统的控制 (9)4.4. 采用磁流变液阻尼器的1/4车辆振动实验系统的控制 (10)产品简介快速控制原型(Rapid Controller Prototyping, RCP)和硬件在回路实时仿真(Hardware-in-Loop,HIL)是目前国际上控制系统设计的常用方法,它把计算机仿真(纯软件)和实时控制(硬件在回路)有机结合起来,用户可把仿真结果直接用于实时控制,极大提高控制系统的设计效率。
目前,这一系统或设计方法已经在高校和实验室得到普遍采用,最典型的例子为德国的dSPACE快速控制系统原型设计系统。
dSPACE卡是一个基于MATLAB/Simulink开发环境的自动代码生成工具,拥有快速控制原型开发和硬件在环仿真功能。
应用这种方法,可使电控单元系统及机械控制系统的开发和测试简捷和高效。
因此,dSPACE已经成为运动控制和过程控制开发的好工具,受到了全球用户的欢迎。
本公司研制的cSPACE快速控制原型和硬件在回路开发系统(以下简称cSPACE系统)基于TMS320F2812DSP开发,与dSPACE公司的DS1104卡相当,拥有AD、DA、10、Encoder和快速控制原型开发、硬件在环仿真功能,通过Matlab/Simulink设计好控制算法,将输入、输出接口替换为公司的cSPACE 模块,编译整个模块就能自动生成DSP代码,在控制卡上运行后就能生成相应的控制信号,从而方便地实现对被控对象的控制。
电动汽车用两挡AMT简介20140320
M阻 1
2
ig M
接合套转速低于接合齿圈转速
J2 J1
Mf
调速策略
驱动电机转速略高于理论目标值,使接 合套转速略低于目标挡位接合齿圈转速
M阻
1
2
ig
M
接合套转速高于接合齿圈转速
同步开始前,驱动电机转速会有所下 降,并且电机调速时会出现超调现象, 所以最终取n3=50r/min。
换挡过程控制策略
已有论文发表:纯电动轿车AMT换挡过程协调匹配控 B. 换挡执行机构速度控制 制方法[J].中国公路学报.
电动汽车用两挡AMT简介
开发电动汽车专用变速器的意义
• 采用两挡位自动变速传动,可提高目标车型的动力性和经济性 • 提高制动能量回收率 • 有效控制电机高转速引起的振动和噪声,提高目标车型运行的
舒适性 • 提高能量利用率,延长目标车型续驶里程
两挡AMT用于电动汽车的优势
• 为了同时满足爬坡加速和最高车速的需求,采用固定挡减 速器的电动汽车需要匹配大扭矩、高转速的驱动电机;采 用两挡AMT的电动汽车可以通过增大一挡速比来满足爬坡 加速对驱动力的需求,通过减小二档速比来满足最高车速 对电机高转速的需求,从而降低电机的最大扭矩和最高转 速。
由传感器信号判断档位是否挂上 是
恢复驱动电机转矩
结束
驱动电机调速 否
调速度是否完成
是
继续摘档 否
摘档是否完成
是 否
调速度是否完成
是
换挡过程控制策略
换挡过程的控制策略主要体现为对驱动电机的调速控制和对换 挡执行机构的速度控制
A. 驱动电机调速控制
同步时传动系统动力学简化模型
J2 J1
Mf
接合套转速低于接合齿圈转 速,接合套受到的阻力矩与从动 部分作用于同步环的摩擦力矩方 向一致,有利于同步器同步;如 果接合套转速高于接合齿圈转速, 不利于同步器同步。
dSPACE实时仿真系统介绍
dSPACE实时仿真系统介绍一、dSPACE实时仿真系统简介dSPACE实时仿真系统是由德国dSPACE公司开发的一套基于MATLAB/Simulink的控制系统开发及半实物仿真的软硬件工作平台,实现了和MATLAB/Simulink/RTW的完全无缝连接。
dSPACE实时系统拥有实时性强,可靠性高,扩充性好等优点。
dSPACE硬件系统中的处理器具有高速的计算能力,并配备了丰富的I/O支持,用户可以根据需要进行组合;软件环境的功能强大且使用方便,包括实现代码自动生成/下载和试验/调试的整套工具。
dSPACE软硬件目前已经成为进行快速控制原型验证和半实物仿真的首选实时平台。
RCP(Rapid Control Prototyping)—快速控制原型要实现快速控制原型,必须有集成良好便于使用的建模、设计、离线仿真、实时开发及测试工具。
dSPACE 实时系统允许反复修改模型设计,进行离线及实时仿真。
这样,就可以将错误及不当之处消除于设计初期,使设计修改费用减至最小。
使用 RCP 技术,可以在费用和性能之间进行折衷;在最终产品硬件投产之前,仔细研究诸如离散化及采样频率等的影响、算法的性能等问题。
通过将快速原型硬件系统与所要控制的实际设备相连,可以反复研究使用不同传感器及驱动机构时系统的性能特征。
而且,还可以利用旁路(BYPASS )技术将原型电控单元(ECU :Electronic Control Unit )或控制器集成于开发过程中,从而逐步完成从原型控制器到产品型控制器的顺利转换。
RCP 的关键是代码的自动生成和下载,只需鼠标轻轻一点,就可以完成设计的修改。
HILS(Hardware-in-the-Loop Simulation)—半实物仿真当新型控制系统设计结束,并已制成产品型控制器,需要在闭环下对其进行详细测试。
但由于种种原因如:极限测试、失效测试,或在真实环境中测试费用较昂贵等,使测试难以进行,例如:在积雪覆盖的路面上进行汽车防抱死装置( ABS )控制器的小摩擦测试就只能在冬季有雪的天气进行;有时为了缩短开发周期,甚至希望在控制器运行环境不存在的情况下(如:控制对象与控制器并行开发),对其进行测试。
快速控制原型平台 不同于DSPACE的RCP方案介绍
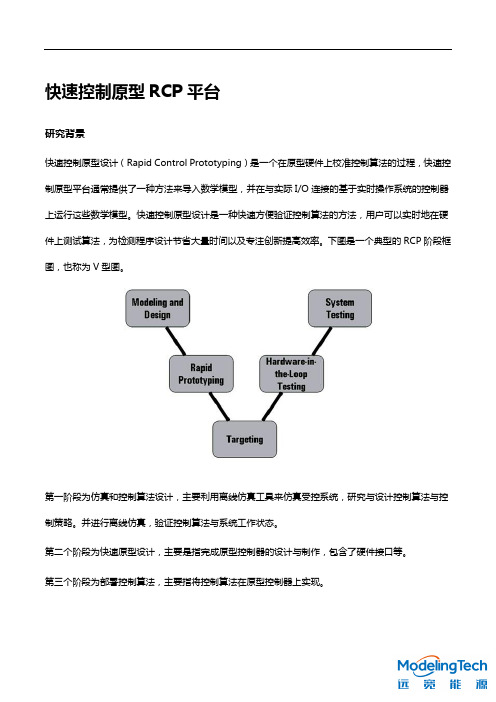
快速控制原型RCP平台研究背景快速控制原型设计(Rapid Control Prototyping)是一个在原型硬件上校准控制算法的过程,快速控制原型平台通常提供了一种方法来导入数学模型,并在与实际I/O连接的基于实时操作系统的控制器上运行这些数学模型。
快速控制原型设计是一种快速方便验证控制算法的方法,用户可以实时地在硬件上测试算法,为检测程序设计节省大量时间以及专注创新提高效率。
下图是一个典型的RCP阶段框图,也称为V型图。
第一阶段为仿真和控制算法设计,主要利用离线仿真工具来仿真受控系统,研究与设计控制算法与控制策略。
并进行离线仿真,验证控制算法与系统工作状态。
第二个阶段为快速原型设计,主要是指完成原型控制器的设计与制作,包含了硬件接口等。
第三个阶段为部署控制算法,主要指将控制算法在原型控制器上实现。
第四个阶段为硬件在环测试,原型控制器+控制算法实现后需要进行功能性和正确性的验证,此时需要用一个实时仿真器来仿真真实的系统,然后用原型控制器和实时仿真器构成闭环,测试控制器的准确性,以及故障工况下控制器是否正常工作。
这一步在把控制器直接接入真实系统前是必不可少的。
第五个阶段是系统测试,完成硬件在环测试后,可以将控制器直接接入真实系统,验证其功能性与正确性。
这五步完成后便完成了RCP的流程,可以量产控制器了。
由此可以见其中非常重要的环节是快速原型控制器。
远宽解决方案远宽能源提供了一套基于PXI平台的快速原型控制系统,可以完成算法快速部署,调试等内容,帮助设计者新的控制思路(方法)能在实时硬件上方便而快捷地进行测试。
该平台有如下特点:∙易于部署:快速高效部署控制算法,减少二次开发负担。
∙易于联调:方便的与被控对象进行连接,快速发现控制算法中存在的问题。
∙应用广泛:配置强大的运算器与FPGA接口,资源丰富,适用多种应用方向。
使用时,用户可以在自己熟悉的环境中搭建电力电子控制算法模型,并一键下载到NI PXI的实时CPU 上运行,并借助FPGA板卡采集信号与发送PWM控制脉冲,快速的实现一个电力电子原型控制系统,并能够连接实物硬件构成闭环,进行运行和控制的相关测试。
基于matlab的控制系统仿真及应用
基于matlab的控制系统仿真及应用控制系统是现代工程领域中一个非常重要的研究方向,它涉及到自动化、机械、电子、信息等多个学科的知识。
而在控制系统的设计和优化过程中,仿真技术起着至关重要的作用。
Matlab作为一种功能强大的工程计算软件,被广泛应用于控制系统仿真和设计中。
在Matlab中,我们可以通过编写代码来建立各种控制系统的模型,并进行仿真分析。
通过Matlab提供的仿真工具,我们可以方便地对控制系统的性能进行评估,优化控制器的参数,甚至设计复杂的控制策略。
控制系统仿真的过程通常包括以下几个步骤:首先,建立控制系统的数学模型,描述系统的动态特性;然后,在Matlab中编写代码,将系统模型转化为仿真模型;接着,设定仿真参数,如控制器的参数、输入信号的形式等;最后,进行仿真运行,并分析仿真结果,评估系统的性能。
控制系统仿真可以帮助工程师快速验证设计方案的可行性,节约成本和时间。
在实际应用中,控制系统仿真可以用于飞行器、汽车、机器人等各种设备的设计和优化,以及工业生产过程的控制和监测。
除了在工程领域中的应用,控制系统仿真还可以帮助学生深入理解控制理论,加深对系统动态特性的认识。
通过在Matlab中搭建控制系统的仿真模型,学生可以直观地感受到控制器参数对系统响应的影响,从而更好地掌握控制系统设计的方法和技巧。
总的来说,基于Matlab的控制系统仿真是一个非常强大和实用的工具,它为控制系统的设计和优化提供了便利,也为学生的学习提供了帮助。
随着科技的不断发展,控制系统仿真技术也将不断完善和拓展,为工程领域的发展带来更多的可能性和机遇。
Matlab作为控制系统仿真的重要工具,将继续发挥着重要作用,推动控制领域的进步和创新。
汽车电子中嵌入式开发平台与辅助工具结合分析讲座20
国内主要汽车生产厂商
国内主要汽车生产厂商
中国一汽
中国一汽是国内汽车行业最大的企业集团, 目前拥 有“解放”牌卡车、“红旗”牌轿车两大民族品牌,与 德国大众公司合资生产“奥迪”、“捷达”(包括“宝 来”)两个轿车系列品牌。
国内主要汽车生产厂商
“解放”牌卡车
国内主要汽车生产厂商
“红旗”牌轿车1
技术背景
PowerOSEK
PowerOSEK是由北京西曼自动化技术有限公司与清 华大学计算机系智能技术与系统国家重点实验室合作, 自主研制出了符合OSEK规范的实时操作系统。
PowerOSEK具有实时性、高度模块化和灵活配置能 力、标准化界面、可扩展性。它同时为系统提供进程管 理、资源管理、计数器与报警服务、事件机制、中断管 理、钩子例程、错误处理等功能处理的服务。广泛适用 于汽车电子动力系统、底盘一体化等系统嵌人式产品的 应用开发。公司网站http:/// 。
技术背景
DeltaOS操作系统
它主要包括:内核DeltaCORE、 嵌入式TCP/IP协议支持DeltaNET、 嵌入式文件系统DeltaFILE、 嵌入式图形接口DeltaGuI。
DeltaOS支持ARM7、strongARM、PPC8xx、 X86、 PPC4XX、MIPS等多种嵌入式微处理器,可应用于消费 电子产品、通信产品、工业控制及军用电子产品中。
国内主要汽车生产厂商
“红旗”牌轿 车2
汽车电子应用背景
汽车电子应用背景
三轮车+1轮=4轮车?
汽车电子应用背景
随着汽车工业与电子工业的不断发展… …
汽车电子应用背景
汽车电子应用背景
汽车电子应用背景
汽车电子应用背景
汽车电子化是现代汽车发展的重要标志之一。未来汽车 市场的竞争是汽车电子化的竞争。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
微纳科技cSPACE快速控制原型开发系统(基于MATLAB的DSP快速控制原型开发系统)一.产品简介 (1)二.系统组成 (2)三.硬件资源 (4)四.应用案例 (6)4.1.直线电机驱动的二级倒立摆的控制 (6)4.2.磁悬浮球系统的控制 (8)4.3.三容水箱过程控制实验系统的控制 (9)4.4.采用磁流变液阻尼器的1/4车辆振动实验系统的控制 (10)一.产品简介快速控制原型(Rapid Controller Prototyping,RCP)和硬件在回路实时仿真(Hardware-in-Loop,HIL)是目前国际上控制系统设计的常用方法,它把计算机仿真(纯软件)和实时控制(硬件在回路)有机结合起来,用户可把仿真结果直接用于实时控制,极大提高控制系统的设计效率。
目前,这一系统或设计方法已经在高校和实验室得到普遍采用,最典型的例子为德国的dSPACE快速控制系统原型设计系统。
dSPACE卡是一个基于MATLAB/Simulink开发环境的自动代码生成工具,拥有快速控制原型开发和硬件在环仿真功能。
应用这种方法,可使电控单元系统及机械控制系统的开发和测试简捷和高效。
因此,dSPACE已经成为运动控制和过程控制开发的好工具,受到了全球用户的欢迎。
本公司研制的cSPACE快速控制原型和硬件在回路开发系统(以下简称cSPACE系统)基于TMS320F2812DSP开发,与dSPACE 公司的DS1104卡相当,拥有AD、DA、IO、Encoder和快速控制原型开发、硬件在环仿真功能,通过Matlab/Simulink设计好控制算法,将输入、输出接口替换为公司的cSPACE模块,编译整个模块就能自动生成DSP代码,在控制卡上运行后就能生成相应的控制信号,从而方便地实现对被控对象的控制。
运行过程中通过cSPACE提供的MATLAB接口模块,可实时修改控制参数,并以图形方式实时显示控制结果;而且DSP采集的数据可以保存到磁盘,研究人员可利用MATLAB对这些数据进行离线处理,下图为利用cSPACE工具的开发流程图。
图1 cSPACE开发流程图二.系统组成微纳科技cSPACE快速控制原型和硬件在回路开发系统根据国际上控制系统设计常用的快速控制原型和硬件在回路原理进行开发,硬件功能与德国dSPACE 公司的DS1104卡相当,拥有dSPACE- DS1104所具备的大部分接口功能和快速控制原型开发、硬件在回路仿真技术,具体包括以下三大部分:一、cSPACE系统的控制卡采用高性能的TMS320F2812DSP开发,并且外扩高性能的AD、DA和正交编码信号处理模块,具有丰富的硬件接口,可以同时控制多台电机。
图2 cSPACE的DSP控制卡二、cSPACE系统的开发环境是基于广大科研人员所熟悉的MATLAB/Simulink进行开发,方便用户使用,同时能充分利用MATLAB强大的科学计算、信号分析处理、图形处理功能。
图3 cSPACE的MATLAB开发环境三、cSPACE系统的控制界面采用MATLAB/Simulink进行开发,能在线修改10个变量和实时显示4个变量,自动存储数据,结构简单,方便用户使用。
图4 cSPACE的监控界面三.硬件资源cSPACE的硬件资源如下所示:●主处理器为TMS320F2812 DSP,处理能力为150MIPS●16通道的12bit AD,转换时间为250ns,输入范围为(0,3V)●6通道的16bit AD,转换时间为3.1us,输入范围为(-10,10V)或(-5,5V)●4通道16bit的DA,建立时间为10us,输出范围为(-10,+10V)●3通道独立的PWM信号,分辨率为16位,1通道有两路输出,共6路输出,这6路输出也可以作为输出的IO引脚使用●2路输入IO引脚●4通道QEP单元正交编码信号处理模块●1路RS232串口●1路增强型CAN接口●128k×16bit 的片内flash 和18k×16bit 的SARAM●三个32 bit 的系统定时器,4个16 bit通用定时器用户额外可扩充的功能:●5通道PWM信号,分辨率为16位●1路RS232串口●多达20个可单独编程的复用口,亦可用作通用I/O 口●三个外部中断口,并有外围中断扩展模块,可支持多达45 个外围中断我公司cSPACE控制系统与国外同类系统主要性能对比表1 cSPACE与国外同类产品对比表格硬件模块cSPACE dSPACE主处理器采用TMS320F2812DSP开发,时钟频率为150M,指令周期为6.67ns 采用TMS320F2407DSP开发,时钟周期为40MAD6路高性能的16bitAD模块8路高性能的16bitAD模块DA4路高性能的16bitDA模块8路高性能的16bitDA模块正交编码信号处理模块4路2路RS232接口1路2路PWM信号输出模块8路8路IO接口8路IO接口16路cSPACE系统硬件成本底,控制系统设计好后,可以把生成的目标代码烧写进控制卡,从而构成脱离计算机而独立运行的嵌入式控制系统,控制被控对象,整个过程用户不需进行硬件和C语言或汇编语言的开发,极大减小用户构建控制系统时间和降低成本。
四.应用案例4.1. 直线电机驱动的二级倒立摆的控制倒立摆是一个典型的快速、多变量、非线性、强耦合、自然不稳定系统,必须采取有效的控制算法才能使之稳定。
倒立摆在控制过程中,能有效反映诸如镇定性、鲁棒性、随动性以及跟踪等许多关键问题。
因此人们常常利用倒立摆检验各种控制算法对不稳定性、非线性和快速系统的控制能力,以及各种控制算法的有效性。
倒立摆的控制研究具有理论意义,多级摆控制是控制领域研究的难点。
其中二级倒立摆的实物图如下图所示:图5 直线电机驱动的二级倒立摆二级摆包括直线电机、上摆杆和下摆杆以及测试摆杆角度的编码器、测试电机直线位移的光栅。
cSPACE 快速控制原型系统接收来自光电编码器的摆杆角度信号和光栅输出的直线电机的工作台位移信号,并对信号进行处理得到1212,,,,,x x φφφφ六个状态变量,然后根据最优控制算法计算得到精确的控制量,经过DA 转换后输出模拟控制信号,再经伺服驱动器放大后驱动直线电机输出相应的力来控制摆杆倒立平衡。
下图为硬件组成的原理框图。
直线电机角度编码器倒立摆伺服驱动器直线传感器DSP 控制卡监控计算机角度编码器上摆杆摆角下摆杆摆角图6 二级倒立摆控制系统硬件框图 对于二级倒立摆的控制,采用最优控制算法控制二级倒立摆,下图为最优控制算法的cSPACE 框图编码器二下摆杆编码器一光栅上摆杆图7 二级倒立摆最优控制算法图中encoder1、encoder4、encoder3分别是DSP控制卡采集电机位置、下摆杆角度和下摆杆角度的正交编码信号处理的模块,WM-DAC1是cSPACE系统的DA转换模块。
编译模块后生成针对控制卡的目标代码,运行程序后控制卡就能采集传感器的信号,处理这些信号经过得到控制量,控制量经过DA转换后得到模拟控制信号,驱动器对模拟控制信号进行放大后驱动直线电机使二级摆能保持稳定。
4.2. 磁悬浮球系统的控制图8 磁悬浮实验系统磁悬浮实验装置由被控对象钢球、电磁铁、LED平行光源、硅光电池传感器、cSPACE控制卡以及驱动系统组成,它的原理是采用LED平行光源和光电传感器测量被控对象钢球与电磁铁之间的距离变化,控制系统采集变化的信号并进行PID、超前校正等控制器的运算,得到控制信号,通过放大器控制电磁铁绕组中的电流,使之产生与钢球的重力相平衡的电磁力,这样钢球就可以悬浮在空中而处于平衡状态。
微纳科技的磁悬浮球实验系统采用cSPACE快速控制原型系统开发,具有MATLAB/Simulink图形化开发、自动生成可行性代码、参数在线调节、变量在线观测和自动存储的功能,使磁悬浮球电控单元的开发和控制算法的实现变得更加简捷和高效。
系统控制效果直观,富有趣味性,能够很好地培养学生的学习兴趣,是自动控制、计算机控制技术、机电一体化等课程很好的实验装置,也是控制理论研究的很好的实验平台。
以下为磁悬浮球系统的PID控制算法框图:图9 磁悬浮球实验系统PID控制算法4.3. 三容水箱过程控制实验系统的控制微纳科技三容水箱过程控制实验系统是学习和研究过程控制原理的实验系统,由三容水箱和微纳科技cSPACE控制系统组成,用户可以在MATLAB/Simulink环境下采用PID算法对三容水箱的液位、压力、流量进行控制,实验系统还附带有温度控制实验。
图10 过程控制实验系统4.4. 采用磁流变液阻尼器的1/4车辆振动实验系统的控制磁流变液阻尼器是利用磁流变液的流变效应而制作的结构简单、功耗小、可控性强、阻尼力可实时调节的智能型阻尼器。
此类阻尼器在机械、汽车以及土木工程等领域的振动控制方面具有广阔的应用前景。
为研究磁流变阻尼器和半主动控制算法的有效性,采用一套完整的模拟车辆系统试验平台,包括模拟车辆系统、数据采集系统、控制系统和程控电流源等,采用cSPACE系统,分别实现on-off控制、连续控制和模糊控制三种控制策略,对磁流变减振器进行半主动控制实验。
图11 磁流变液阻尼器振动实验平台采用模糊控制的cSPACE控制算法框图如下图所示:图12 磁流变液阻尼器模糊控制算法图中ADC模块为cSPACE的AD模块,用于采集上质量块(车体)和下质量块(转向架)的速度信号;“A1”和“A3”模块用于对采集的速度信号进行变换,得到实际的速度信号,用车体的速度信号减去转向架的速度信号得到相对速度信号;“WM-Read1ab”模块用于在计算机上观测车体的速度和车体和转向架之间的相对速度信号;“ifsystem1”和“ifsystem”模块用于对速度信号设置阈值,当速度大于一定的值才施加控制,防止在速度为0附近行程振荡;“WM-DAC1”模块把“On-off控制”算法的输出转变为实际的电压信号,“Fuzzy”模块实现模糊控制方法。
对模块编译自动生成代码并且下载到DSP控制卡,运行后就能在DSP控制卡相应的接口实现相应的功能,从而对磁流变液阻尼器进行控制。
当调试好程序,可以把程序烧写进DSP,这样能使控制系统脱离计算机运行,构成嵌入式的控制系统。