机器人应用举例.
《机器人应用举例》PPT课件可编辑全文

81
日本研制的拟人机器人
ppt课件
82
各种仿人手部
ppt课件
83
拟人机器人
ppt课件
84
双足移动拟人机器人
ppt课件
履带式移动机器人
85
ppt课件
86
非制造环境下的机器人-步行拟人机器人
ppt课件
总目录
退出87
北京航空航天大学研究的多指灵巧手
ppt课件
88
物
ppt课件
32
我国沈阳自动
化所研制的排
爆机器人
ppt课件
33
工兵机器人
美国将M60坦克的炮塔去掉后改装的豹式扫雷车
ppt课件
34
德国研制的Minebreaker 2000机器人扫雷车
ppt课件
35
三、 水下机器人
水下机器人的关键技术 能源技术 水下精确定位、通信和零可见度导航技术 材料技术 作业技术 智能技术 回收技术
第二章 机器人应用
机器人广泛的应用于生活生产及科 研的各个领域,大致分为7类:
工业、军用、水下、空间、服务、 农业、仿人机器人
ppt课件
1
一、 工业机器人
应用工业机器人的准则 从恶劣工种开始采用机器人 在生产率和生产质量落后部门使用机器人 有长远规划 机器人投入和使用成本 应用机器人时需要人 现有机器机器人化
ppt课件
36
ppt课件
37
ppt课件
38
ppt课件
39
ppt课件
40
水下机器人-水下移动潜水器
ppt课件
41
四、 空间机器人
ppt课件
42
ppt课件
43
机器人应用案例范文

机器人应用案例范文
1、无人餐厅
无人餐厅是利用机器人技术在餐饮服务上的应用,是智能机器人进入
餐厅服务行业的一种新型应用,在生活中已经受到了越来越多的人们的关注。
无人餐厅结合了机器人技术,实现了点餐、上菜、催单等一系列服务
流程的自动化,提升了服务质量、缩短了服务时间,令顾客在就餐过程中
体验更加舒适自在。
无人餐厅的机器人技术主要包括两部分,一部分是客户端,即机器人
服务系统;另一部分是服务端,即餐厅属性控制系统。
客户端是机器人具
体的服务技术,主要作用在于向客户提供点菜、上菜、催单等一系列服务,它们有一定的智能性,能够根据客户的不同需求提供切合客户需要的服务,比如推荐特色菜肴。
服务端则主要负责控制整个无人餐厅服务的流程,通
过后台操控,实现服务的有效流转,从而使整个服务能够更加顺畅、高效。
由于无人餐厅应用了机器人技术,采用自动智能管理,使得服务人员
更多地聚焦服务,没有盲目的投入,从而节省了人力成本,提升了效率和
质量。
除了有效减少人力成本外,无人餐厅还有一个特点,那就是不断更新,跟上趋势,根据客户的需求,不断改进服务,提供更好的体验,更加
满足客户的需求。
机器人技术及应用-机器人控制系统举例

机器人技术及应用-机器人控制系统举例机器人技术及应用机器人控制系统举例在当今科技飞速发展的时代,机器人已经成为了我们生活和生产中不可或缺的一部分。
从工业制造中的自动化生产线,到医疗领域的手术机器人,再到家庭服务中的智能机器人,机器人的应用范围越来越广泛。
而机器人能够如此高效、精准地完成各种任务,离不开其核心的控制系统。
机器人控制系统就像是机器人的“大脑”,它负责指挥机器人的动作、感知环境、处理信息以及做出决策。
一个优秀的机器人控制系统能够使机器人更加灵活、智能和可靠,从而更好地满足各种应用需求。
接下来,让我们通过几个具体的例子来深入了解一下机器人控制系统。
首先,我们来看工业机器人中的控制系统。
以汽车生产线上的焊接机器人为例,它需要在快速移动的同时,精确地将焊点焊接在指定的位置上,并且要保证焊接的质量和稳定性。
为了实现这一目标,其控制系统通常采用了高精度的运动控制算法和传感器反馈技术。
在运动控制方面,控制系统会根据预设的焊接路径和速度,计算出机器人各个关节的运动轨迹和速度指令。
通过精确控制电机的转速和转角,实现机器人手臂的平稳、快速运动。
同时,为了应对生产过程中的各种不确定性因素,如工件的尺寸偏差、装配误差等,控制系统还会实时监测机器人的实际位置和姿态,并与预设值进行比较,通过反馈控制算法对运动指令进行调整,以确保焊接的精度和质量。
在传感器方面,焊接机器人通常配备了激光测距传感器、视觉传感器等设备,用于感知工件的位置、形状和焊缝的特征。
这些传感器采集到的数据会实时传输给控制系统,控制系统经过处理和分析后,能够根据实际情况对焊接参数进行优化,例如调整焊接电流、电压和焊接时间等,从而提高焊接的效率和质量。
除了工业机器人,服务机器人中的控制系统也有着独特的特点和应用。
以家用扫地机器人为例,它需要在复杂的家庭环境中自主移动、避开障碍物,并完成清扫任务。
扫地机器人的控制系统通常采用了基于地图构建和路径规划的算法。
《机器人应用举例》PPT课件
ppt课件
70
ppt课件
71
ppt课件
72
机器人相扑大赛
相扑机器人
ppt课件
73
ppt课件
74
ppt课件
75
雕刻机器人:电脑雕刻系统集扫描、编辑、 排版、雕刻诸功能于一体,是CAD/CAM 一体化的典型产品,能方便快捷地在各种 材质上雕刻出逼真、精致、耐久的二维图 形及三维立体浮雕。
ppt课件
ppt课件
55
服务机器人-导盲犬 服务机器人-加油机器人
ppt课件
56
娱乐服务机器人-机器狗
ppt课件
57
娱乐服务机器人-足球机
器人
ppt课件
58
医疗机器人-外科手术机器人
ppt课件
59
ppt课件
60
护士助手机器人
ppt课件
61
电缆操作机器人
ppt课件
62
清华制造所研制的排水管道清淤机器人
第二章 机器人应用
机器人广泛的应用于生活生产及科 研的各个领域,大致分为7类:
工业、军用、水下、空间、服务、 农业、仿人机器人
ppt课件
1
一、 工业机器人
应用工业机器人的准则 从恶劣工种开始采用机器人 在生产率和生产质量落后部门使用机器人 有长远规划 机器人投入和使用成本 应用机器人时需要人 现有机器机器人化
ppt课件
53
服务机器人-外墙清洗移动机器人 服务机器人-玻璃清洗机器人
ppt课件
54
清洗巨人:利用两套计算机和一个机 器人控制器来控制飞机的清洗 ,不仅 减轻了工人的劳动强度,而且大大提 高了工作效率。例如,人工清洗一架 波音747飞机需要95个工时,而机器 人清洗仅需12个工时。
机器人技术及应用-机器人视觉系统应用举例课件

机器人技术及应用-机器人视觉系统应用举例课件机器人视觉系统是机器人中的一个重要部分,它通过摄像头等传感器采集图像信息,并通过图像处理和分析算法来实现对环境和目标的理解和感知。
机器人视觉系统广泛应用于各个领域,下面是一些机器人视觉系统应用举例:1. 工业制造:机器人视觉系统在工业制造中起到了至关重要的作用。
例如,在物流领域,机器人视觉系统可以用于包装的识别和定位,以实现自动化的包装和搬运过程。
另外,机器人视觉系统还可以用于产品质量检测和缺陷识别,提高产品的品质和制造过程的效率。
2. 农业领域:机器人视觉系统也在农业领域得到了广泛的应用。
例如,可以利用机器人视觉系统识别和定位作物,并进行自动化的喷灌和植物保护。
此外,机器人视觉系统还可以用于农产品的采摘和分类,提高农业生产的效率和质量。
3. 医疗保健:机器人视觉系统在医疗保健领域也有很多应用。
例如,可以利用机器人视觉系统对医院环境进行实时监测和清洁,维护医疗环境的卫生和安全。
此外,机器人视觉系统还可以用于辅助手术和医疗诊断,提高医疗效果和准确性。
4. 家庭服务:随着家庭机器人的普及,机器人视觉系统在家庭服务中也有很多应用。
例如,可以利用机器人视觉系统实现智能家居的控制,通过识别和定位家中的各种设备和物品,实现智能化的家居管理。
另外,机器人视觉系统还可以用于家庭安防监控,通过识别和分析来自摄像头的图像信息,实现家庭的安全监控和报警。
5. 交通领域:在交通领域中,机器人视觉系统可以用于交通监控和交通管理。
例如,可以利用机器人视觉系统对道路上的车辆和行人进行识别和跟踪,帮助交通警察监控交通状况和实施交通管理措施。
另外,机器人视觉系统还可以用于智能交通系统中的车辆导航和自动驾驶,提高交通安全和交通效率。
总结起来,机器人视觉系统在工业制造、农业、医疗保健、家庭服务和交通等领域都有广泛的应用。
随着机器人技术的不断发展和进步,机器人视觉系统将会在更多的领域发挥重要的作用,为人们的生产和生活带来更大的便利和效益。
机器人在制造业中的应用

机器人在制造业中有多种应用,包括但不限于以下几个方面:
1.生产线自动化:机器人能够在生产线上自动完成各种操作,如装配、
焊接、涂装、搬运等,提高了生产效率和产品质量。
2.运输和搬运:机器人可以用于运输和搬运重物,如搬运货物、物料和
零部件。
3.检测和质量控制:机器人可以进行精确的检测和质量控制,包括外观
检查、尺寸测量、瑕疵检测等,以确保产品符合标准。
4.仓储管理:机器人可以用于仓库管理,包括货物装载、货物码垛、库
存管理等,提高了仓储效率和准确性。
5.数据收集和分析:机器人可以收集生产线上的各种数据,并进行实时
分析和监控,帮助制造商更好地了解生产状况和进行优化。
6.危险环境操作:机器人可以在危险环境中代替人类进行操作,如高温、
高压、有害气体等,保证工作安全性。
总的来说,机器人在制造业中的应用能够提高生产效率、降低成本、改善产品
质量、增强工作场所安全性,并为制造商提供更多的数据和洞察力。
举例5种机器人的应用案例
举例5种机器人的应用案例机器人作为一种智能化的设备,已经在许多领域得到广泛应用。
以下是五种机器人的应用案例及相关参考内容。
1. 工业生产机器人:工业生产机器人被广泛应用于汽车制造、电子设备制造等工业领域,能够实现高效、高质量的生产。
例如,ABB公司的机器人在汽车制造过程中可以完成焊接、涂装、装配等复杂工作。
相关参考内容可以包括机器人的工作原理、常用型号及其应用范围、生产效率和质量提升等。
2. 医疗机器人:医疗机器人可以辅助医生进行手术操作,提高手术精确度和安全性。
例如,达芬奇手术机器人可以在微创手术中进行高精度、稳定的操作。
相关参考内容可以包括机器人的操作原理、具体的手术案例、机器人技术对手术效果的影响等。
3. 农业机器人:农业机器人可以应用于农田作业、果园管理等领域,提高农业生产效率和质量。
例如,果树采摘机器人可以自动识别、采摘成熟的水果,减轻农民劳动负担。
相关参考内容可以包括机器人的作业原理、应用案例、机器人技术对农业生产的影响等。
4. 家庭服务机器人:家庭服务机器人可以帮助人们完成家居清洁、照料老人等日常任务,提供便利和舒适的生活体验。
例如,iRobot公司的扫地机器人可以自动清扫地面,让家庭保持干净整洁。
相关参考内容可以包括机器人的功能特点、性能对比、用户体验等。
5. 教育机器人:教育机器人可以辅助教育教学过程,提升学生的学习兴趣和效果。
例如,Pepper机器人可以与学生进行互动交流,并提供个性化的学习内容。
相关参考内容可以包括机器人在教育中的应用案例、对学生学习动力的影响、机器人技术对教育模式的改变等。
总结:机器人在工业、医疗、农业、家庭和教育等领域的应用已经取得了显著的成果。
相关参考内容可以包括机器人的工作原理、具体的应用案例、技术对相关行业的影响等。
这些案例不仅展示了机器人的实际应用,还反映了其推动行业发展和提升人类生活质量的巨大潜力。
举例5种机器人的应用案例
举例5种机器人的应用案例机器人在不同行业和领域中有着广泛的应用。
以下是五种机器人的应用案例和相关参考内容。
1. 工业制造机器人:工业制造机器人被广泛应用于汽车制造、电子设备制造、航空航天等行业中的生产线上。
它们可以完成重复性高、精度要求高的工作,提高生产效率并减少人力投入。
例如,ABB公司的多关节机器人能够执行焊接、组装和搬运等任务,提高了汽车制造的效率和质量。
相关参考内容:- ABB多关节机器人:ABB是全球领先的机器人制造商,他们提供的多关节机器人适用于各种工业应用。
- 工业机器人应用案例:该网站收集了全球各行各业中的工业机器人应用案例,包括汽车制造、电子设备制造、食品加工等行业。
2. 医疗机器人:医疗机器人用于医疗诊断、手术和康复等领域。
例如,达芬奇手术机器人系统可以协助外科医生进行精确的手术操作,提高手术的精度和安全性。
另外,机器人可以用于康复训练,帮助患者恢复运动功能。
例如,ReWalk机器人可以帮助脊髓损伤患者重新学习行走。
相关参考内容:- 达芬奇手术机器人系统:该系统由Intuitive Surgical公司开发,是一种用于外科手术的机器人系统。
- 医疗机器人应用案例:该网站收集了全球各地的医疗机器人应用案例,包括手术机器人、辅助诊断机器人等。
3. 农业机器人:农业机器人可以自动化农业生产过程,提高生产效率和质量。
例如,自动驾驶拖拉机可以自动完成土地耕作和播种等任务。
智能摄像机和传感器可以用于检测作物的生长情况,并提供精确的施肥和灌溉建议。
另外,果树采摘机器人可以自动收集水果,减少人力投入。
相关参考内容:- 自动驾驶拖拉机:该网站介绍了自动驾驶拖拉机的原理、应用案例和未来发展方向。
- 农业机器人应用案例:该网站收集了全球各地的农业机器人应用案例,包括果树采摘机器人、智能摄像机等。
4. 教育机器人:教育机器人用于教育和培训领域,可以提供个性化的学习支持和互动体验。
例如,NAO机器人可以与学生进行语言交流和编程实践,激发学生的学习兴趣和创造力。
ABB工业机器人典型工程应用
[\WObj] 数据类型: wobjdata 定义用于计算当前机械臂位置的工件坐标系。 如果省略该参数,则使用当前的有效工件。
CJointT 中变元仅需定义程序任务名称
4 读取当前位置数据功能CRobT与CjointT的应用
ENDPROC
5 目标点数据参数赋值的使用方法
目标点数据Robtarget组件的调用
例:控制机器人由当前点,安全移动至自定义工作原点。
PROC MoveToHomePos()
VAR robtarget pActualPos;
pActualpos:=CRobT(\Tool:=Gripper\WObj:=wobj0); pActualpos.trans.z:=pHome.trans.z; !重新定义pActualpos目标点z方向偏移参数为pHome点z方向偏移高度, pActualpos其 他组件数据不变。 MoveL pActualpos,v500,z10,Gripper; !为避免机器人与周边设备发生碰撞,机器人首先由当前点沿着z方向直线移动至 pHome同高的安全位置。 MoveJ pHome,v500,fine,Gripper; !由安全位置移动至机器人原点。
451 Phome.trans.z
调用rot
[0,0.7,0.7,0] Phome.rot
调用q1-q4的方法
0 Phome.rot.q1 0.7 Phome.rot.q2 0.7 Phome.rot.q3 0 Phome.rot.q4
5 目标点数据参数赋值的使用方法
目标点数据Robtarget组件的调用
工业机器人自动化技术应用案例分析报告

工业机器人自动化技术应用案例分析报告一、引言工业机器人自动化技术是当今制造业领域的重要趋势之一。
随着科技的迅猛发展,工业机器人在各行各业的应用日益广泛。
本文将通过分析几个典型的工业机器人自动化技术应用案例,探讨其对生产效率、产品质量和工作环境改善的积极影响。
二、汽车制造行业中的工业机器人应用案例分析1. 汽车焊接在汽车制造过程中,焊接是关键的工艺之一。
传统的焊接工艺依赖人工操作,存在效率低、质量难以保证以及劳动强度大的问题。
采用工业机器人自动化焊接技术可以提高焊接速度和准确度,并确保焊接质量的一致性。
举例来说,某汽车工厂引入了工业机器人自动化焊接系统,取代了传统的人工焊接工艺,结果生产效率提高了20%,同时产品质量也得到了明显提升。
2. 汽车装配工业机器人在汽车制造的装配过程中发挥了重要作用。
传统的汽车装配需要大量的人工参与,工作效率低下且易出错。
引入工业机器人自动化技术能够实现零部件的高速装配,提升装配的准确性和一致性。
以某汽车厂为例,他们使用工业机器人进行发动机的组装,不仅提高了装配速度,还使得产品的合格率达到了99.9%。
三、电子制造行业中的工业机器人应用案例分析1. 表面贴装在电子制造业中,表面贴装是一个关键的工艺环节。
工业机器人自动化系统可以实现电子元器件的精确、高速贴装。
相较于传统的手工贴装,工业机器人贴装速度更快且准确度更高。
某电子组装厂采用工业机器人自动化系统进行表面贴装后,生产效率提高了50%以上,并且批次一致性得到了有效保障。
2. 线路板检测传统的线路板检测依靠人工目视,速度慢且准确度有限。
通过引入工业机器人自动化技术,可实现线路板的快速自动检测。
一家电子制造企业使用工业机器人进行线路板检测后,大幅提高了检测速度和精确度,同时降低了人工成本,使得产品的质量得到了有效的提升。
四、食品加工行业中的工业机器人应用案例分析1. 包装在食品加工行业,工业机器人在包装环节的应用可以大幅提高生产效率。
写作文扫地机器人举例子的句子

写作文扫地机器人举例子的句子段落一,家居清洁小能手。
扫地机器人简直就是家居清洁的小能手啊!家里再也不用为打扫卫生发愁了,这小家伙自己就能搞定。
瞧它在地上跑来跑去,灰尘啊、头发啊全都被它吸走了,真是太省心了!
段落二,智能得让人惊叹。
说它智能,真的是一点都没错!它能自己规划清扫路线,不会撞墙也不会重复扫。
有时候我都觉得它比我还会打扫,真是科技改变生活啊!
段落三,解放双手的神器。
对于我这种懒人来说,扫地机器人简直就是解放双手的神器。
我可以在沙发上躺着看电视,它就在那儿默默地工作,打扫完还会自动回充,太方便了!
段落四,节能又环保。
这扫地机器人还特别节能,充电一次能用好久。
而且它用的材料也是环保的,真是既实用又环保啊!
段落五,未来家庭的必备品。
我觉得啊,这扫地机器人绝对是未来家庭的必备品。
以后家家户户都会有这么一个小家伙,家里干干净净的,生活多美好啊!。
工业机器人的发展与应用论文正稿
飞行器先进制造技术——工业机器人的发展与应用摘要:随着计算机技术的不断向智能化方向发展,机器人应用领域的不断扩展和深化,工业机器人已成为一种高新技术产业,为工业自动化发挥了巨大作用,将对未来生产和社会发展起越来越重要的作用。
文章介绍了工业机器人的国内国外的发展状况和应用趋势,以及带来的经济效益。
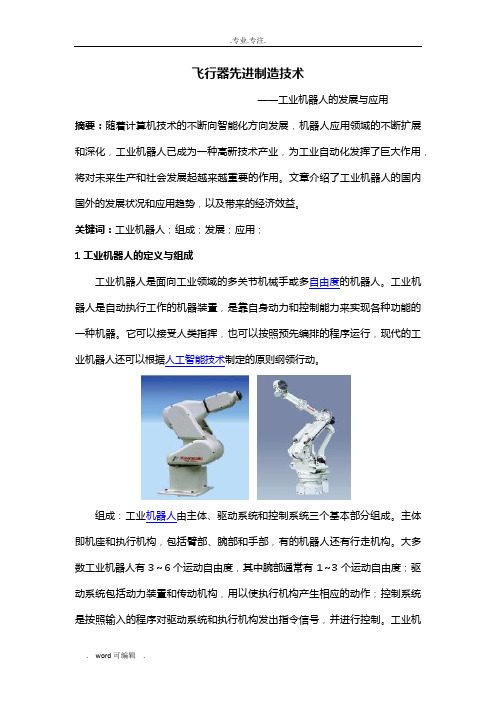
关键词:工业机器人;组成;发展;应用;1工业机器人的定义与组成工业机器人是面向工业领域的多关节机械手或多自由度的机器人。
工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。
它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
组成:工业机器人由主体、驱动系统和控制系统三个基本部分组成。
主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。
大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
工业机器人按臂部的运动形式分为四种。
直角坐标型的臂部可沿三个直角坐标移动;圆柱坐标型的臂部可作升降、回转和伸缩动作;球坐标型的臂部能回转、俯仰和伸缩;关节型的臂部有多个转动关节。
2 工业机器人的发展随着科技的不断进步,工业机器人的发展过程可分为三代,第—代,为示教再现型机器人,它主要由机器手控制器和示教盒组成,可按预先引导动作记录下信息重复再现执行,当前工业中应用最多。
第二代为感觉型机器人,如有力觉触觉和视觉等,它具有对某些外界信息进行反馈调整的能力,目前已进入应用阶段。
第三代为智能型机器人它具有感知和理解外部环境的能力,在工作环境改变的情况下,也能够成功地完成任务,它尚处于实验研究阶段。
2.1国外工业机器人的的发展美国是机器人的诞生地,早在1961年,美国的ConsolidedControlCorp和AMF公司联合研制了第一台实用的示教再现机器人。
举例5种机器人的应用案例

举例5种机器人的应用案例# 五种机器人的应用案例## 1. 工业机器人工业机器人主要应用于生产线上的自动化生产过程中,能够执行重复、繁琐、高强度的工作任务。
例如,在汽车制造行业,工业机器人可以完成车身焊接、涂装、组装等工序。
这些机器人具备高速、高精度、高稳定性的特点,能够提高生产效率和产品质量。
## 2. 医疗机器人医疗机器人是一种应用于医疗领域的先进机器人技术。
例如,手术机器人可以辅助医生进行精细、复杂的手术操作,减少手术风险和误差。
另外,康复机器人可以帮助患者进行康复训练,恢复运动功能。
医疗机器人的应用有助于提高手术成功率和康复效果,改善医疗服务的质量。
## 3. 农业机器人农业机器人是应用于农业生产领域的自动化设备。
例如,智能播种机器人可以精确、高效地进行种植作业,提高种植效率;采摘机器人可以自动采摘农作物,减少人工劳动成本。
农业机器人的使用可以提高农业生产的效益和可持续发展能力,促进农业现代化。
## 4. 物流机器人物流机器人是应用于仓储、物流领域的机器人系统。
例如,仓库机器人可以自动化地进行货物搬运、分拣,提高物流效率;配送机器人可以实现无人送货,提高送货速度和准确性。
物流机器人的应用可以降低物流成本,提升物流服务质量,满足日益增长的物流需求。
## 5. 教育机器人教育机器人是一种应用于教育领域的人工智能产品。
例如,在学前教育中,教育机器人可以通过与孩子的互动,引导他们学习语言、数学等知识;在编程教育中,教育机器人可以帮助学生学习编程思维和解决问题的能力。
教育机器人的应用可以提供个性化、互动性强的学习体验,促进学生的全面发展。
## 结论机器人在各个领域的应用越来越广泛,不仅可以提高工作效率,降低成本,还可以改善生产和服务的质量。
工业机器人、医疗机器人、农业机器人、物流机器人和教育机器人是其中五个重要的应用领域。
随着技术的不断进步和创新,相信未来还会有更多类型的机器人出现,并在不同的领域发挥重要作用。
举例说明运用齐次变换矩阵求解机器人正运动学的方法

举例说明运用齐次变换矩阵求解机器人正运动学的方法运用齐次变换矩阵求解机器人正运动学是机器人学中重要的一个应用。
在机器人学中,正运动学问题是指根据机器人各关节的运动参数,求解机器人末端执行器的位置和姿态。
齐次变换矩阵是一种用来描述从一个坐标系到另一个坐标系的变换关系的方法,它可以将平移和旋转变换统一起来,因此非常适用于机器人的运动学描述。
下面我们以一个简单的二自由度机械臂为例,详细说明如何运用齐次变换矩阵求解机器人正运动学。
1.机器人几何参数的定义我们首先需要定义机器人的几何参数,包括各关节的长度、原点位置和旋转轴方向等。
假设我们的机器人臂长分别为L1和L2,关节1的旋转轴在z轴上,关节2相对于关节1的旋转轴在y轴上。
2.齐次变换矩阵的构建根据机器人的几何参数,我们可以构建各关节相对于前一关节的齐次变换矩阵。
对于本例中的二自由度机械臂,我们需要构建两个齐次变换矩阵,分别表示关节1和关节2相对于机器人基座的变换关系。
假设关节1的变换矩阵为T1,关节2的变换矩阵为T2,机器人基座的变换矩阵为Tbase。
根据机器人几何参数的定义,我们可以得到如下变换矩阵的表达式:T1 = [cos(θ1) -sin(θ1) 0 L1*cos(θ1)sin(θ1) cos(θ1) 0 L1*sin(θ1)00100001]T2 = [cos(θ2) 0 sin(θ2) L2*cos(θ2)0100-sin(θ2) 0 cos(θ2) L2*sin(θ2)0001]Tbase = [1 0 0 001000 0 1 d_base0001]其中θ1和θ2分别表示关节1和关节2的旋转角度,d_base表示机器人基座的高度。
3.机器人末端执行器的正运动学求解对于机器人末端执行器的正运动学问题,我们需要根据机器人各关节的运动参数,如各关节的旋转角度,通过乘法计算得到末端执行器的位置和姿态。
具体过程如下:a)首先,将各关节的变换矩阵相乘,得到机器人末端执行器相对于基座的变换矩阵。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
跳舞机器人
医疗机器人
足球机器人
AIBO机器狗
指挥机器人
机器人相扑大赛 相扑机器人
雕刻机器人:电脑雕刻系统集扫描、编辑、 排版、雕刻诸功能于一体,是CAD/CAM 一体化的典型产品,能方便快捷地在各种 材质上雕刻出逼真、精致、耐久的二维图 形及三维立体浮雕。
六、农业机器人
农用采摘机器人
(俄罗斯)
Rocky 7 (美国喷气动力实验室)。采用六轮独 立悬挂系统,前后独立转向机构。其简化型号 “索杰纳”曾于1997年4月成功登陆火星
空间机器人-空间站操作臂
五、 服务机器人
清华制造所研制的生物芯片基因探针分配机器 人系统
非制造环境下的机器人-康复机器人
DANTE-1和DANTE-2 (Carnegie Mellon Univ.) 。包括8条缩放式足机构, 其中DANTE-1高3m ,宽2m,重400kg,曾进行火山考察。
第二章 机器人应用
机器人广泛的应用于生活生产及科 研的各个领域,大致分为7类:
工业、军用、水下、空间、服务、 农业、仿人机器人
一、 工业机器人
应用工业机器人的准则 从恶劣工种开始采用机器人 在生产率和生产质量落后部门使用机器人 有长远规划 机器人投入和使用成本 应用机器人时需要人
工业机器人的优点
3 喷涂机器人
4 搬运、码垛机器人
5 喷丸机器人
主要应用于物体表面涂装清理行业:如 飞机机身和机翼的清除旧漆、涡轮叶片底部 的清理。
昊为科技成功研制中国第一台六轴联动 智能机器人,世界叶片产量最大的无锡叶片 厂 采用其系统。
工业机器人的发展趋势
性能不断提高,价格不断下降 机械结构向模块化、可重构化发展 控制系统采用模块化结构,向基于计算机 的开放性控制器发展 采用多传感器融合技术 机器人化机械逐渐发展
履带式移动机器人
非制造环境下的机器人-步行拟人机器人
总目录
退出
北京航空航天大学研究的产率,降低成本 – 改善劳动环境 – 降低对工种熟练程度的要求 – 使生产过程通用化
1 焊接机器人
例如:日本、意大利和法国共同研制的焊 接机器人,用激光三角测距法看到焊缝, 提高焊接的精确度
2 装配机器人
机器人电子装配生产线
机器人化装配生产线
装配工业 机器人
娱乐服务机器人-机器狗
娱乐服务机器人-足球机 器人
医疗机器人-外科手术机器人
护士助手机器人
电缆操作机器人
清华制造所研制的排水管道清淤机器人
自动摊铺机
消防机器人和救援机器人
消防机器人
室外保安机器人
德国排爆机器人
防暴机器人
管内机器人
大型喷浆机器人
隧道凿岩机器人
迎宾机器人
导盲机器人
美国罗克威尔公司及IS机器人公司研制的一种名叫 “水下自主行走装置”(ALUV)的水下扫雷机器
蟹
英国研制的履带式“手推车” (左图)、 “土
拨鼠”(右图右)和“野牛”(右图左)排爆 机器人在波黑及科索沃战争中用来探测及处理 爆炸物
我国沈阳自动 化所研制的排 爆机器人
工兵机器人 美国将M60坦克的炮塔去掉后改装的豹式扫雷车
二、 军用机器人
机器人代替战士从事繁重工作 在极限条件如核武器、生化武器条件下可 以完成任务 可以牺牲自我毫不畏惧
军用机器人:无人战场车
-飞行机器人
军用机器人-排弹移动机器人
轮式移动军用机器人
扫雷轮式移动军用机器人
无人移动侦察车
水下扫雷机器人
瑞典博福斯公司研制的“双鹰”水下扫雷机器人
德国研制的Minebreaker 2000机器人扫雷车
三、 水下机器人
水下机器人的关键技术 能源技术 水下精确定位、通信和零可见度导航技术 材料技术 作业技术 智能技术 回收技术
水下机器人-水下移动潜水器
四、 空间机器人
MARSOKHOD月球探测车 LUNOKHOD月球探测车
(俄罗斯)
温室中的嫁接机器人 伐根机器人
七、仿人机器人
仿人的结构 仿人的运动 仿人的控制 仿人的视觉,语言及情感交流
英 国 大 学 研 制 的 气 囊 驱 动 拟 人 机 器 人
美 国 大 学 研 制 的 电 传 动 拟 人 机 器 人
日本研制的拟人机器人
各种仿人手部
拟人机器人
双足移动拟人机器人
服务机器人-外墙清洗移动机器人 服务机器人-玻璃清洗机器人
清洗巨人:利用两套计算机和一个机 器人控制器来控制飞机的清洗 ,不仅 减轻了工人的劳动强度,而且大大提 高了工作效率。例如,人工清洗一架 波音747飞机需要95个工时,而机器 人清洗仅需12个工时。
爬缆索机器人
服务机器人-导盲犬 服务机器人-加油机器人