后处理软件应用1.0版
华铸cae后处理实时动态图形模块的深度扩展
物理量通过计算机屏幕表达出来计算机软件水平的提高总是依赖于硬件的不断发展没有大容量的内存储器和显存也是随着软硬件系统的不断更新而不断发展完善起来的1.0版诞生思路是用线条勾画铸件轮廓但是由于处理的铸件网格数不大所以仍然能获得很好的显示效果1995年又在DOS环境下开发了更高分辨率480用来对计算结果进行动态模拟显示[19]ΪÈí¼þ²úÒµµÄ·¢Õ¹ÌṩÁË»úÓöºÍÌôÕ½Òò´ËÓÉÓÚºÍÒÔÇ°DOS下的显示模式有很大差别不能通过编程直接对显示卡进行读写操作从1995-1997年华铸CAEÈ«Ãæ¸Ä°æÒÆÖ²µ½Windows环境下研究开发了基于单元几何的有限差分图形学系统算法开发了全Windows环境的数值画面系列功能AVI两种动画合成与播放以及格式转换的功能总成[20][21]ÏòÓû§ÌṩÁËÒ»¸ö¸ß¶ÈʵÓû¯´Ó´Ë±ã¿ÉÒÔ´ÓÖлñÈ¡ÓÃÓÚ¹¤ÒÕÓÅ»¯µÄÖØÒªÐÅÏ¢BC++3.1开发环境也是在16位内存方式下运行的程序最多可以访问64兆字节的内存华铸CAE ÆäÍø¸ñµ¥ÔªÊý×î¶à²»Äܳ¬¹ý400万但是随着市场的发展和用户需求的不断提高并突破400万网格单元限制是必然趋势经过长时间的酝酿形成了系统4.0版本4.0版本的功能有了进一步的扩张适应性进一步鲜明逻辑性进一步提高轻松网格单元数再也不受软件环境的限制更重要的是为软件从Win9x平台向Win2000平台过渡准备了充分条件便成为一套系统化功能完善的软件系统从3.0版到4.0版 现在为了提高后处理水平调整的速度比如就大大提高了图形处理效率[18] 1.4 课题内容及其意义可视化技术是过程仿真和工程分析类软件中一项非常重要的支撑技术正受到越来越广泛的重视并以恰当的图形图像方式向用户表达 华铸CAE现用的后处理模块(基本模块)虽然其图形功能比较丰富完善那就是出图速度太慢动态显示的目的经常需要反复调整好多次才能得到自己期望的图形状态华铸CAE首先把其完全基于差分单元扩大了处理数据的范围实现了缩孔缩松形成及Niyama缩松的实时显示和动态调整用户无需理解各种图形参数的具体含义就能够实现缩孔缩松缺陷的动态调整有效 其次在扩展模块中讨论了动态区域统计的算法思想图形图像数据表面看来只是一个简单的算法标志着后处理水平的升华专业分工越来越明显高新技术产品商品化智能化的必然趋势就是傻瓜化用户无需学习很多的专业知识具体到华铸CAE来说本课题研究正是适应这种市场需求进行现有软件的扩展开发快捷 2 预备知识本后处理实时动态图形模块作为铸造成形模拟仿真领域的商品化软件经过十多年的研究开发在本论文展开论述之前内容2.1 华铸CAE后处理的图形表达方式适当地选择一定的图形图像形式直接为用户的工程决策提供参考信息也是整个铸造工艺[14]在计算结果通常包含如下有用信息压力涡流任一单元的温度变化温度梯度的分布固液界面推进的速度芯子的过热情况某个部位缩孔缩松的具体信息等等本软件设计了如下表达方式2-51不携带任何物理属性用一种颜色表示一种材质以产生立体感2在铸件的充型网格单元被填充或尚未填充缩孔出现和未出现以细线条勾勒铸件型腔的轮廓这样而忽略另一状态采用这种方式可以取得非常直观的效果以红色立方体选择显示凝固过程中铸件内剩余的液相以绿色立方体选择显示充型过程已填充的单元以黑色立方体选择显示缺陷形成过程中的缩孔 色标图压力之类的物理量故采用色标显示比方说当恰当设置色温上下限时十分逼真地显示出早期打箱出来的真实铸件4对于流动速度冲击力之类的矢量变量箭头表示方向由于前后单元的正平行投影容易造成图形干扰因此根据表达数据的不同图2-1 华铸CAE后处理实时动态图形模块的数值画面扩展模块显示的图形图像均以三维实体平行正投影的方式构成画面任意角度可任意选择各种数值画面以提取所需工程信息 2.1.2 模拟结果的过程动画演示金属液浇注凝固成形(也就是铸造)铸件的缺陷大都是在这个过程中形成的[18]所以如果仅仅由静止的三维图片来反映它通过将一幅幅静止的三维图片按照其时间上产生的序列加以合成通过动画直观地观察铸件内部的温度场和流动场的变化判断铸件中可能发生缩孔缩松的部位波动夹渣动画有两种一种是帧动画是让画面的内容随着数据流的不断读取同步地在计算机屏幕上显示其变化由于数据处理量十分庞大就是实现再将这些画面按发生的时间序列压缩合成为一个动画数据文件在完整的商品化软件中二者各有所长实时动态图形模块则由于采用了完全基于差分单元的算法和RLE行程跳转算法使得实时动画成为可能 图2-3 透视图缩孔形成 图2-4 色标图色温分布 图2-5 矢量图充型速度 2.2 论文中涉及的术语本论文涉及一系列有关术语和概念需要先加以说明 均匀网格采用的都是均匀网格基本单元为正立方体它可以降低程序的复杂性但是也有致命的缺点或者浇注系统和冒口颈等部位较薄时网格数目会急剧增多2ËùÓеIJî·Öµ¥Ôª³ß´çÓпÉÄܶ¼²»Ò»Ñùx y z可以由手工指定非均匀网格技术可以有效的控制网格数目但是给无论是前处理网格划分动态后处理的实现都带来了相当的难度[24]²î·Öµ¥Ôª»ªÖýCAEÔÚ´Ë·½Ê½ÏÂÖý¼þ铸型系统的各层都被划分成许多基本单元作为后处理模块用色彩和线条将所涉及到的各有关差分单元逐一堆砌就象砌筑复杂的大厦一样如何千变万化 4作为后处理模块按其所包含物理信息比如流动的填充状态压力相变都需要专门的图形画面来显示表达5Device Independent Bitmap是一种标准的可以直接保存为BMP文件6在用图形表达标量时这就需要对颜色进行标定虽然目前显示器的色彩解析能力已经能够做到真彩色多于256色没有太大的意义考虑到需给Windows系统界面保留必要的彩色空间以256色BMP格式录存画面数据称作色标就构成温标在本软件中其上限下限可以根据情况随意指定就可以利用使色标映射到适当的温度区间 7主视区各种三维画面都在主视区内描绘色标显示空间在切片显示状态下其宽度可以动态调整[18] 视见变换X轴垂直屏幕向外表示必须经过一定的简单几何变换过程 9每个正六面体网格六个面中多数情况下后处理的重心在于表达铸件的物理场数据这种情况下而在每个正六面体网格六个面中对于每一个网格由于存在网格之间的遮挡关系但可见面一定正向最简单的图像格式压缩算法之一一个记录重复的次数从而取得压缩数据存储空间的效果假设存在一组利用字母表示的数据aabbbbbccdddff,采用行程压缩方法处理后11. 反求定位通过视见逆变换再根据计算机图形学的有关算法由此即可索引求得该处的物理函数值图形绘制其基本的数学依据是笛卡尔三维坐标旋转变换的逆变换[23][25][28] 实时动态图形模块的图形表达方式以及论文中将要涉及的一些专业术语3 扩展算法的总体思路3.1 前言本课题的基本任务就是扩展现有后处理实时动态图形模块从通用的数值画面表达扩展到缩松缩孔缺陷的表达使得实时动态图形模块达到实时动态的三维效果关键是要对实时模块的完全基于差分单元使之适应范围扩展到非均匀网格均匀网格不过是非均匀网格一特例均匀网格的图形信息调整各个相同然后根据规律的网格遍历顺序进行拷贝即可平移不同的是各个网格的定位信息计算也比较繁琐不管铸件的几何特征如何复杂因此所有复杂的几何特征都表现在有序排列的网格单元所归属的材质属性上拥有铸件材质的所有单元的集合将这些单元按其在网格中的相对位置逐一描绘出来就可以构成铸件的几何结构数值模拟软件涉及的图形处理不仅仅要表现铸件的几何形状而这些物理函数值又与各网格单元是相关的有限差分图形系统的算法逻辑必须以差分单元为基础和依据3.2.2 有限差分非均匀网格系统的图形处理算法在有限差分非均匀网格系统中无论其所包含的单元有多少xyz有多不同平移和缩放都是一致的因此在正平行投影的方式下就可用于所有单元的变换而定位数据也总是已知单元的任何复杂几何形体的投影变换都归结为一个基本单元的投影变换和所有各单元按材质进行选择组合具体分析如下基本的三维变换按照通常的习惯以计算机屏幕作为绝对坐标系的YOZ平面用大写字母表示绝对坐标以一个带有普遍性的正六面体网格为例共各棱的原始长度为i,j,k暂设ik各顶点原始坐标记为),,(i i i i z y x P 其中i=0如图3-1所示P0P7P6P5P4P3P2P1单元各原始坐标 图3-1 用户坐标系与绝对坐标系的变换 一般而言先绕轴旋转角为了保证直浇道一直竖直变换到绝对坐标系后其坐标为),,(i i i Z Y X [23][25][28][30]Y而X坐标值都变成0只剩下Y展开如下y逐层堆砌时Y方向上的投影正好等于基本单元三条棱040301,,P P P P P P 的相应投影若以z y x dZ dZ dZ ,,分别表示三个方向棱长在显示屏上的Z向投影则40301040301,,,,Y Y dY Y Y dY Y Y dY Z Z dZ Z Z dZ Z Z dZ z y x z y x −=−=−=−=−=−= 对于xz三向序号分别为ik的单元0∑∑∑∑∑∑======++=++=kn zjn y in x kn zjn y in x dY dY dY dY dZ dZ dZ dZ 0000 因此0然后对各个网格的偏移量进行线形求和即可得到任一单元中的任一顶点在屏幕上的投影位置均匀网格各顶点在屏幕上的投影坐标完全可以由基本单元对应顶点在屏幕上的投影坐标平移获得从而面的位置也可以通过对基本单元线而在扩展算法中任一网格的三向边长y任意网格的位置则由循序网格的y至于屏幕上任一网格单元中线从而先计算出基本网格的面然后在描绘图形时加上不同网格的三向缩放量和偏移量就可以直接得出各个网格的面这种方式下将基本网格的对应象素经简单数学处理后拷贝到不同的位置就可以得到其余网格的面和棱线对改进算法的扩展大大拓宽了后处理的范围将平移算法直接应用到像素点上充分地体现了图形处理算法完全基于差分单元的特性[18]3.2.3 有限差分网格单元的消隐算法在图形处理算法中一般的图形系统的消隐要根据几何形状拓朴关系等等逐项分别予以处理[23] [25] [28]各有关图形除要表现固有的铸件铸型几何关系外若先按一般的几何消隐规则进行处理算法将极其复杂 基于有限差分单元的消隐算法的基本思路就是逐单元将其按物理量的表达形式涂绘在屏幕上就能自动实现消隐的效果却节省了一般消隐算法中大量的搜索判断等过程所必须的时间以及相应的存储开销由于算法规则简洁稳定性 具体来讲其一是每个单元自身各棱的可见性与消隐(1)各单元自身的消隐在于各面的正向性即X方向由于差分单元是正六面体比如25四点构成的面只要1X X >®∫∂(2)÷ ∝∞™♠…™∝⊗∏∨∝″≠¬∉∝∪ϒ ©∨∅™™∨⊇©∉⇓•∉∫◊≠⇔″∏⇓∝⊗™∂©√因而在一定的姿态下轴上投影的大小又取决于单元的序号当0>x dX 时反之向序号大的单元离观察者远单元在y知道了序号与远近的这些关系逐单元逐层地涂绘显示在屏幕上这种消隐算法虽然简单但必须花一部分时间去描绘被覆盖的棱线和面扩展算法的关键是尽量减少这些被覆盖的面和棱线的绘制一般情况下不管是内部单元网格平均每个网格要涂绘三个面我们只需要绘制表面单元网格对于大多数表面单元网格来说因而在实时旋转铸件表面信息和剖切面信息实时剖切过程中只涂绘铸件表面和剖切面从而使图形显示的速度得到了显著的提高需挨个判断是否作为轮廓线画出使得此判断大大简化具体分析如下若面O可见bd是否作为轮廓线分别取决于该单元相邻四个单元对应表面的AC例如则棱a不是轮廓线反之图3-2 非均匀网格堆砌后轮廓线的判断 由于任何一条作为轮廓线的棱线都是由两个作为铸件表面的立方体面所共有的则这条棱线就会被绘制两次改进算法中如图3-3所示并将九条棱分为中心棱a1c1和外围棱a2b2 c2每个可见面只负责从中心点O开始的逆时针前三条棱的轮廓线判断和描绘图中a2B面负责b1b3棱的绘制c2从而避免了中心棱a1c1棱可能导致的重复绘制图3-3 正六面体网格基本棱线的判断与绘制 图3-4 上柴机体铸件的STL原型 图3-5 华铸CAE(8.0)后处理基本模块中的变网格显示 图3-6 实时动态图形模块中非均匀网格铸件材质的动态显示 在基于均匀网格的华铸CAE系统中甚至在相对坐标系中各个网格的坐标也是以基本网格单元为单位的也可以借鉴相应的思想式中dx[ii]为X向上各个网格的实际长度xtotal为X向铸型绝对长度图3-4基于非均匀网格的铸件材质基本模块显示和实时模块显示从差分单元的旋转定位乃至各单元点面在屏幕上投影像素点的确定这是一种完完全全的基于差分单元的图形系统只需要计算一个基本单元的屏幕投影数据平移就可以绘制出所有的单元极大地提高了图形处理的速度获得了很高的编程效率本文一直以最常见的正交六面体网格为例进行阐述均匀网格不过是非均匀网格的一个特例xyz非均匀网格也就转化为均匀网格而且对于均匀网格图形处理的效率更加显著3.3基于设备无关位图的绘图方式3.3.1 DIB简介[31]DIB全称为与设备无关位图最简单的图像格式在这种存储格式中利用这种存储格式但是由于图像数据没有经过任何处理也就不必进行数据的解压缩和压缩操作主要包括三个方面的内容假设记录一个扫描行的像素值需要n个字节1个字节记录了位图第一个扫描行的像素值1个字节记录了位图第二个扫描行的像素值位图阵列的第m1)biHeight.同时,由于Windows对于DIB图像特别规定:文件内每行字节的个数必须是4的倍数,如果不是的话,就在每行的末尾加上几个字节,并用0填充这些字节biBitCount)%32=0时,n=(biWidthbiBitCount)/8+4必须判断每行数据中是否包含多余的字节 其次即位图像素值与位图阵列的关系单色位图用一个字节记录8个像素其中左边四位记录第一个像素256色位图以一个字节记录一个像素 另外DIB的字节数组是从图像的最下面一行开始逐行向上存储的另外 DIB的与设备无关性主要体现在以下两个方面1例如也可以在16色模式下使用2像素的颜色独立于系统调色板运行在不同输出设备下的应用程序都要通过DIB来交换图像内存中一个BITMAPINFO结构和一个存储像素阵列的数组其定义为BITMAPINFOHEADER结构包含了DIB的各种信息必须是 0(不压缩),// 1(BI_RLE8压缩类型)或2(BI_RLE4压缩类型)之一DWORD biSizeImage; //以字节为单位的图像大小 LONG biXPelsPerMeter; //位图的水平分辨率 LONG biYPelsPerMeter; //位图的垂直分辨率 DWORD biClrUsed; //颜色表的颜色数 DWORD biClrImportant; //重要颜色的数目 } BITMAPINFOHEADER; RGBQUAD结构用来描述颜色 typedef struct tagRGBQUAD { BYTE rgbBlue; //蓝色的强度 BYTE rgbGreen; //绿色的强度 BYTE rgbRed; //红色的强度 BYTE rgbReserved; //保留字节RGBQUAD结构中的颜色顺序是BGR DIB文件是以BITMAPFILEHEADER结构开头的 typedef struct tagBITMAPFILEHEADER { WORD bfType; //文件类型BM然后是RGBQUAD结构组成的颜色表(可以没有)DIB的颜色信息储存在自己的颜色表中在输出一幅DIB之前然后再调用相关的GDI函数(如::SetDIBitsToDevice或::StretchDIBits)输出DIBGDI函数会把DIB转换成DDB(Device Dependent Bitmap)将DIB的颜色格式转换成与输出设备相同的颜色格式在真彩色的显示模式下要显示一个256色的DIB将DIB像素的逻辑颜色索引转换成系统调色板索引但一般来说DIB是不压缩的[18]绘图的程序实现动态剖切的效果在扩展模块中采用先生成DIB位图 在windows操作系统中若是每画一个元素都是针对设备操作1.生成画笔2.选取画笔3.绘制图素画刷画刷若是重复这一设备操作过程 然而只要求得一个基本单元的点面在一定的旋转状态再加上其他网格单元的三个方向的缩放比和定位数据即屏幕像素偏移量和线这样线无论铸件多么复杂整个绘制过程只需要计算一个基本单元的点面数据平移其实质就是绘制一个基本单元这使得DIB位图的生成十分简单快速对于有限差分正交六面体网格系统同时扩展模块用DrawDib视频函数组来显示DIB不依赖GDI函数 打开视频句柄 初始化绘图通道 生成DIBDrawDibEnd() ¹Ø±ÕÊÓƵ¾ä±úDrawDibº¯Êý×éÔÚÏÔʾµ¥¸öDIBʱµ«ÔÚÏÔʾһ×é´óСÏàͬµÄDIBʱÔò¿ÉÒÔʹÓÃͬһ¸öÊÓƵ¾ä±úºÍͬһ¸ö»æͼͨµÀ3µÚ245ÕâÑù¾Í½ÚÊ¡ÁË´óÁ¿ÓÃÓÚ×ÊÔ´³õʼ»¯ºÍÊͷŵÄʱ¼ä3.3.3 DIB位图在本算法中的应用在中因为在工程数值模拟领域在扩展模块中而在内存中则始终存在着一个对应于视窗客户区的DIB位图重绘的过程也就是贴内存位图的过程贴位图过程当网格数达到几千万时描绘图形视窗移动但是并不需要重新生成DIB位图作图形调整时贴图的过程完全与描图操作分开体现了的思想从计算中得到铸件充型温度场以及结晶相变等物理过程详尽由于这些数据是基于时空四维空间的场物理量数值庞杂后处理模块的难点就在于如何快速存取和动态显示这些数据[13][14] [16]不仅提高了出图效率 3.4.1 图形信息预处理扩展算法将绘图过程分为信息处理和描绘两部分从材质数据物理量数据和铸件姿态参数中提取出绘图时需要的表面信息颜色信息等基本网格单元的投影信息不再需要进行那些繁杂数据的处理和判断将繁杂数据的图形信息处理与描绘图形的过程分开可读性图3-7 扩展模块中的图形分类信息图3-8 扩展模块中的图形调整过程由以上两图可以看出在绘图以前进行图形信息处理在用户进行图形参数实时调整时只更新其中的一小部分调整过程中需要尽量将图形信息分类细化在扩展模块中一方面是基于有限差分的图形系统的要求也是图形信息细化的需要缩放消隐都可以归到相对坐标系中处理分开处理 如前所述实质上是一个将基本网格投影像素点按照缩放平移方式复制到各个位置点的过程不会降低绘图效率XYZ每个坐标方向绘图时的遍历方向是不定的有时从小到大近的网格后画扩展模块采用顺序存储结构只需一位即可存储一个字节可以保存八位信息可以使用位段来存储信息[35]用户所看到的图形是由铸件铸型表面或剖面所组成的表面和剖面网格通常只占整个网格总数的几十分之一本模块借鉴了RLE行程压缩的算法思想在后面的附注中有介绍对于每一段连续的铸件内部网格和同材质属性网格按照行程压缩算法RLE8处理当绘图遍历到此段头或段尾网格时使得不管绘图时是正向遍历还是反向遍历也就是说而只在表面\剖面处停顿这样下图3-9以整个铸型系统的一个截面为例图中假定网格遍历采用由于行程跳转信息只与铸件表面信息和剖面信息有关剖切时更新缩放中行程跳转信息与图形调整之间的关系如下表3-1所示行程压缩的目的是节省存储空间使用行程跳转算法节省的是遍历网格的时间同样对于形体简单的厚大铸件应用行程跳转算法将极大地提高遍历绘图的效率对于形体复杂的薄壁铸件因而 表3-1 行程跳转信息与图形调整之间的关系 铸件表面网格铸型网格砂芯网格铸件内部网格图3-9 非均匀网格行程跳转信息示意图 3.4.4附Run_Lengh_Encoding是最简单的压缩文件方法之一本模块中建立行程跳转信息时也借鉴了RLE的思想一个记录重复的次数从而获得压缩数据存储空间的效果例如可以表示为2a6b4c3d2e2d2a他们非常类似,只是计数方式有所不同一点 0x82 0x82 0x82 0x82 0x96 0x46 0x33 RLE4压缩数据 0x04 0x82 0x00 0x03 0x96 0x46 0x33 0x00 RLE对于包含大面积连续重复数据的图像同时通常需要在表示数据重复次数的字节中利用前端的一位或者两位作为标志位而下一个字节的编码则表示重复的数据两个字节的编码最多只能取代63个或者127个字节长度的数据第一个字节的编码完全用于表示数据值重复的次数这也是RLE压缩方法所能达到的压缩上限每幅BMP图像内部背景色单一因而每个BMP数据流内部的RLE压缩效率很高因而由此可见实际上由42个800而同样的BMP在未压缩状态仅一幅画面数据就有605K本章从理论上将其适用性扩展到非均匀网格基于差分单元其中另外两个特征为此特征服务扩大了数据处理的范围4 扩展模块的程序实现前面几章研究分析了后处理实时动态图形模块的图形处理的扩展算法因而接下来的任务就是将算法程序化4.1 完全面向对象的图形系统4.1.1 面向对象方法简介面向对象是一种程序设计思想类封装自80年代以来成为软件开发领域的主流技术[36]面向对象的基本思想就是即对象通过严格的逻辑抽象来构造软件系统有效的思想方法与原则继承它强调以问题域中的实物为中心来思考问题并根据这些实物的本质特征这使得开发者能够更加有效地思考问题并以其他人[36][37]也能看得懂的方式把自己的认识表达出来存在十多种不同的图形表达方式又可将这些表达方式分为三种温度场图形表达以及流动场图形表达无论处理什么数据基于有限差分单元图形信息预处理以及RLE行程跳转无论哪一种表达方式如旋转缩放处理方式都是相同的运用面向对象的方法图形类体系这个类体系从高到低有三个层次数据层和表达方式层几何层只有一个类CGraph 2CTemGraph和CFldGraph温度场和流动场3颜色信息CMoldGraph类 铸件结构图 CRestLiquidGraph类 铸件色温图 CMoldClrTemGraph类 温度梯度图 CFldClrTemGraph类 流动压力图 CFldSpdGraph类 体积填充图 这些类之间的继承关系如图4-1所示还是内容上这充分体现了面向对象的思维方式。
DeST-应用与发展-.doc

DeST-应用与发展-.docDeST 应用与发展摘要:本文介绍DeST基本设计思想、典型应用和未来发展。
1. DEST的基本思想空调系统的设计过程是一个阶段化的过程,包括初步设计或概念性设计阶段、方案设计和详细设计阶段。
这是一个复杂的、不断反馈的过程。
DeST作为面向设计的模拟分析工具,充分考虑设计过程的阶段性,提出“分阶段设计,分阶段模拟”的思路,在设计的各个阶段,通过建筑模拟、方案模拟、系统模拟、水力模拟等手段对设计进行校核,让设计人员根据模拟的数据结果对其设计进行验证,从而保证设计的可靠性。
DEST的结构充分反映“设计的阶段性”这一特点。
图1是DeST 的整体框架结构示意图。
图2列出了设计的各阶段及其对应的DEST模拟程序。
图1 DEST结构框架示意图图2 DEST各模块及其对应的设计阶段DEST所需要的的气象数据由Medpha产生。
计算机辅助建筑描述程序CABD把用户绘制的建筑物的相关数据自动传输给建筑分析模拟模块(BAS)。
BAS对建筑物热特性进行详细的逐时模拟,它负责计算逐时的房间基础室温,即在没有任何空调系统影响下的房间温度。
逐时的基础室温反映了房间在被动热扰影响下的热特性,在初步设计阶段,建筑师可以通过基础室温来比较各种因素的影响,如围护结构的材料、朝向、建筑物的形状等等。
当建筑设计确定之后,方案模拟模块Scheme可用来模拟建筑物在各种空调方案(分区,系统类型,运行方式)下的运行情况,在方案设计阶段,设计者可以通过模拟结果对不同的空调系统方案进行比较取舍。
在方案确定之后,空调机组选择程序ACSel对所选择的设备进行全工况的校核,一方面可以检验各设备在全年工况下是否能完全满足要求,另一方面得到对冷热源侧的水温、水量要求。
通过冷热冻站模拟模块CPS对用户选择的冷冻机类型、台数和运行方式进行分析,使其能够在整个运行周期内保持最高的能效比。
对于变风量系统,方案模拟得到全年逐时要求的风量后,通过送风管网可及性分析DNA 计算出风机全年的工况点,从而可以根据其全年运行要求来选择风机,使其大部分时间能工作在高效率区间内。
Cimatron的后置处理技术
后处理修改详解〖第一课〗了解GPP后处理必须的过程GPP后处理,必须的过程莫过编译了。
后处理修改的过程如下:一、有记事本或专用的后处理修改器来修改EXF文件,EXF文件又称源代码。
二、编译,利用修改好的EXF文件,生成可用的DEX文件。
三、测试,看看您修改的后处理是否合乎您的需要。
另外,有些修改内容是不在EXF中,而是属于DEF的内容,这时候不需要修改EXF文件,只需要用另外的工具来修改就可以了。
下面会给出图片来解释。
打开DEMO.EXF,开头的内容就是关于自定义的变量类型了* define private variables:FORMA T (SEQUENCING) Seq SubSeq ; --行号类型有关的变量FORMA T (TOOL) CutterComp FirstTool LastTool ; --刀具类型有关的变量FORMA T (COORDINA TES) Xold Y old Zold DXcenter DYcenter DZcenter ; --坐标类型有关的变量FORMA T (COORDINA TES) Zinit Clear Depth ;FORMA T (COORDINA TES) Xhome Yhome Zhome ;FORMA T (COORDINA TES) XfirstOrigin YfirstOrigin ZfirstOrigin ;FORMA T (USER_1) CurrSubNum ;FORMA T (coordinates) ORIGOLDI ORIGOLDJ ORIGOLDK ;* define private flags:FORMA T (USER_2) FlagSub FlagSeq FlagSpin; --与用户2定义的类型有关的变量FORMA T (USER_2) FirstOriginChange FlagError Flagrotmac ;* define private constants:FORMA T (USER_2) YES NO ;* change the format of existing variables:FORMA T (USER_1) SUB_NUMBER ;此处偶把其看作是"户籍登记处",用户自己定义的变量必须在此登记,否则将编译错误.一旦选定类型,其变量格式由*.DEF文件对应部分控制。
HiMAX 多波束采集后处理软件 使用说明书

HiMAX 多波束采集后处理软件使用说明书
目录
1. 概述 .................................................. 1 1.1 软件概述 ............................................. 2 1.2 技术参数 ............................................. 4 1.3 安装与卸载 ........................................... 4 1.4 本章小结 ............................................ 11
HiMAX 多波束采集后处理软件 使用说明书
HiMAX 多波束采集后处理软件使用说明书
手册修订情况
文件编号:YFZ-2016-1341
修订日期
修订次数
说明
HiMAX 多波束采集后处理软件使用说明书
2018 年 12 月
1
A0 版本
2019 年 8 月
HiMAX 多波束采集后处理软件使用说明书 2
6. 船形设计 ............................................. 35
IV
HiMAX 多波束采集后处理软件使用说明书
6.1 船形设计 ............................................ 36 6.2 本章小结 ............................................ 37 7. 计划线设计 ........................................... 38 7.1 绘制计划线 ......................................... 39 7.2 计划线块布线 ....................................... 40 7.3 编辑计划线块 ........................................ 48 7.4 导入导出计划线 ...................................... 62 7.5 快捷键 .............................................. 62 7.6 其他功能 ............................................ 63 7.7 常见问题介绍 ........................................ 63 7.8 本章小结 ............................................ 64 8. 电子海图 ............................................. 65 8.1 海图导入 ............................................ 66 8.2 海图显示 ............................................ 69 8.3 海图查询 ............................................ 70 8.4 本章小结 ............................................ 71 9. 工程底图 ............................................. 72 9.1 工程底图管理 ........................................ 73 9.2 工程底图显示 ........................................ 74 9.3 本章小结 ............................................ 75 10. 多波束测量 ........................................... 76
DDA1.0界面使用说明书

D D A Discontinuous Displacement Analysis用户手册Users Guide大连力软科技有限公司Dalian Mechsoft Co., LtdDDA用户手册总览前言尊进的客户:非常感谢您对大连力软科技产品的支持与信赖!我们相信在您和力软的所有用户的支持下,我们将带给您更多的优质产品和服务!DDA软件是一款全新的基于DDA(discontinuous displacement analysis)方法的分析不连续介质力学的数值模拟软件,该软件在已有的RFPA软件框架下融入了DDA算法。
利用该软件您可以进行边坡工程,地下工程,土力学以及其他方面分析计算。
本手册将为您提供DDA软件的分析流程、实际问题案例分析及系统技术支持等相关细则。
您可以根据自己需求选择阅读相关内容。
若您在学习本软件过程中遇到疑问,我们提供以下方式,为您排忧解难。
➢拨打0411--87315655与技术员直接沟通➢登陆大连力软科技公司网站,进行在线咨询➢加入RFPA__QQ技术交流群(54151787)获取帮助➢将您的问题发送至RFPA@我们衷心的感谢您对大连力软科技的厚爱,我们将秉承诚信、创新、简捷和专业的产品理念为您提供更优质的产品和服务。
大连力软科技有限公司Dalian Mechsoft Co., Ltd第一章软件安装指南 (5)1.1 系统要求 (5)1.2 DDA的安装 (6)第二章软件操作流程 (7)2.1 DDA分析处理问题的具体流程如下: (7)2.2 新建一个分析项目 (8)2.3 建立模型划分网格 (9)2.4 建模大体分为3大步骤: (13)2.5 绘制模型 (13)2.6 填充材料施加边界 (13)2.7 划分网格 (14)2.8 设置DDA,模型参数求解计算 (16)2.9 修改模型参数 (17)2.10 DDA参数 (19)2.11 DDA其他参数: (23)2.12 后处理分析 (25)2.13 查看后处理场图 (25)2.14 查看指定步场图 (27)2.15 对场图的相关操作 (28)2.16 重置模型 (29)第三章实例分析 (30)3.1 新建一个分析项目 (31)3.2 创建网格模型 (31)3.3 设置模型参数,DDA参数 (33)3.3.1设置模型参数 (33)3.3.2 DDA参数设置 (36)3.4 求解计算 (38)第一章软件安装指南欢迎使用由大连力软科技有限公司(Mechsoft)推出的真实破坏过程分析数值计算软件DDA软件系统for Windows'2000/NT/XP。
腹部CT图像后处理软件产品技术要求旭东数字
2. 性能指标2.1 产品说明要求2.1.1 可用性用户根据说明书应能使用软件。
2.1.2 内容每套软件应附有检验合格证和使用说明书。
2.1.3 标识和标示软件的文字、符号应清晰,表达意思应准确,并包括下列标志:a)制造单位名称、商标;b)产品名称;c)软件版本号。
2.1.4 功能性陈述a)功能概述产品描述应概述产品的用户可调用功能、需要的数据、所提供的设施。
对每个所论及的功能(尤其是选项和变量)是否是下列内容的一部分应清晰地说明:——产品功能的;——在产品描述中完整描述产品扩展功能的。
注:不必论及每个用户可调用功能,不必给出功能如何调用的每个细节。
b)边界值如果由于产品特定的边界值致使产品的使用受限,则应提供这些边界值。
例如:——最小或最大值;——值的边界范围;当不可能提供固定的边界值时(例如,边界值取决于应用问题的类型或输入数据时),则应说明这些限制,可以提供允许的值组合,更具体的信息写入用户文档。
c)安全如果提供的话,产品描述中应包含有关防止对程序或数据非授权的无意访问或蓄意访问的手段。
2.1.5 可靠性陈述使用说明书中应有相关可靠性的陈述。
2.1.6 易用性陈述软件运行于windows 操作系统,具有windows 的系统风格,易操作,使用方便。
大部分功能可通过窗口按钮操作。
2.1.7 效率陈述产品描述可以包含产品的时间行为的数据,诸如在指定条件下(例如系统配置和负载分布)关于给定功能的响应时间和吞吐率。
2.1.8 维护性陈述说明书中应该有相关维护性陈述。
2.1.9 可移植性陈述产品描述可包含可移植性说明。
2.2 用户文档集要求2.2.1 完备性说明书包含有软件的运行环境说明,用户对软件的安装、运行使用流程、维护以及管理。
2.2.2 正确性用户通过说明书能正确并且安全的使用软件。
2.2.3 一致性使用说明书为软件唯一的用户文档。
2.2.4 易理解性使用说明书应有图形说明便于用户理解软件的使用,不会产生混淆。
科力达GPS处理软件1.0
科力达GPS应用软件系列GPS 处理软件操作手册第一版广东科力达仪器有限公司二○○八年六月2目录目录目录 (1)第一章简介和安装 (1)§1.1简介和计算机配置要求 (1)§1.1.1 软件简介 (1)§1.1.2 软件运行环境和计算机配置要求 (1)§1.2软件安装步骤 (2)§1.3软件启动和操作步骤 (5)第二章软件功能和菜单 (8)§2.1软件基本功能和界面 (8)§2.1.1主要功能: (8)§2.1.2 主界面 (8)§2.2文件 (9)§2.3数据输入 (10)§2.4基线解算 (13)§2.5平差处理 (14)§2.6成果 (16)§2.7工具 (19)§2.8查看 (23)§2.9设置 (24)§2.10帮助 (24)§2.11星历预报 (27)第三章典型算例 (29)§3.1处理基本步骤 (29)§3.1.1 新建工程 (29)§3.1.2 增加观测数据 (30)§3.1.3 解算基线 (31)§3.1.4 检查闭合环和重复基线 (34)§3.1.5 网平差及高程拟合 (35)§3.1.6平差成果输出或者打印 (36)§3.2特例处理 (36)§3.2.1 基线处理特例 (36)第四章使用提示和注意事项 (41)1目录2 §4.1基线向量处理条件设置原则 (41)§4.2外业成果质量检核标准 (42)§4.3平差条件、基线向量的选择 (43)§4.4平差成果质量检验 (45)§4.5GPS网外部检核方法 (47)第五章动态后处理差分软件 (51)§5.1后差分系统简介和软件安装 (51)§5.1.1 系统简介 (51)§5.2软件启动和初步使用 (52)§5.3软件功能和菜单介绍 (53)§5.3.1 软件功能 (53)§5.3.2 主要菜单及功能介绍 (53)§5.4软件使用典型算例 (54)第六章科力达接收机数据下载 (61)§6.1数据传输软件简介和界面 (61)§6.1.1 菜单项 (61)§6.1.2 工具栏 (64)§6.1.3 状态栏 (65)§6.1.4 程序视窗 (66)§6.2如何进行数据传输 (66)§6.3数据传输软件的扩展作用 (67)§6.3.1 如何输入注册码 (67)§6.3.2 检测注册码 (68)§6.3.3 设置功能 (68)附录A有关专业术语注释 (69)附录B 联系方式 (71)附录C 全国销售及服务网络列表 (72)第一章 简介和安装1第一章 简介和安装§1.1简介和计算机配置要求§1.1.1 软件简介GPSADJ 基线处理与平差软件主要是对GPS 星历数据进行基线处理,并将结果进行约束整网平差,得出控制网最后成果。
利用MasterCAM对FANUC_0i程序后处理修改

利用MasterCAM对FANUC_0i程序后处理修改利用MasterCA M对FANUC_0i程序后处理修改FANUC 0i MA系统配MasterCAM软件仍然是当今数控机床加工的主流搭配,因此本文对广大数控机床的编程与操作人员来讲,很有参考价值。
文中所表述的思路、方法与程序都是作者在长期的工作实践中总结出来的,我们也欢迎广大读者在欣赏本文的同时,将你们有实用价值的技巧与心得写出来与大家共分享。
我们在利用MasterCAM为FANUC 0iMA系统做计算机编程的过程中发现,应用软件默认的FANUC后处理程序(Mpfan.pst)输出的刀路文件,需要大量的手工修改才能满足实际加工的需要。
为了使CAM 软件得到进一步推广应用,我们对MasterCAM9.0后置处理程序进行了编辑,使之应用得到了成功,大大提高了编程效率和程序质量,缩短了产品的制造周期,提高了产品的市场竞争力。
『::好就好::中国权威模具网』1. MasterCAM生成的后处理程序在图1所示中,主要完成:(1)φ12立铣刀铣外形;(2)φ2中心钻打中心孔;(3)φ10钻头钻2-φ10孔的加工。
采用MasterCAM软件完成该零件的数控加工仿真后,应用后处理程序Mpfan.pst,生成的NC加工代码如下。
%O0000(PROGRAM NAME-EXAMPLE1)(DATE=DD-MM-YY-11-07-04 TIME=HH:MM-08:41)N100G21N102G0G17G40G49G80G90(TOOL-1DIA.OFF.-1LEN.-1DIA.-12.)N104T1M6(φ12立铣刀铣外形)N106G0G90X-62.Y10.A0.S1000M3N108G43H1Z50.M8N110Z10.N112G1Z-10.F1000.N114G41D1X-50.F100.N116Y60.N118X-20.N120Y51.N122G3X-14.Y45.R6.N124G1X14.N126G3X20.Y51.R6.N128G1Y60.N130X50.N132Y10.N134X40.Y0.N136X-40.N138X-49.661Y9.661N140G40X-58.146Y1.175N142G0Z50.N144M5N146G91G28Z0.M9N148G28X0.Y0.A0.N150M01(TOOL-2DIA.OFF.-2LEN.-2DIA.-2.)N152T2M6(φ2中心钻)N154G0G90G55X15.Y20.A0.S1500M3 N156G43H2Z3.M8 N158G1Z-3.F50.N160G0Z3.N162X65.N164G1Z-3.N166G0Z3.N168M5N170G91G28Z0.M9N172G28X0.Y0.A0.N174M01(TOOL-3DIA.OFF.-3LEN.-3DIA.-10.)N176T3M6(φ10钻头钻2-φ10孔)N178G0G90G54X-25.Y20.A0.S1000M3 N180G43H3Z3.M8 N182G1Z0.F50.N184G0Z3.N186Z2.N188G1Z-2.N190G0Z3.N192Z0.N194G1Z-4.N196G0Z3.N198Z-2.N200G1Z-6.N202G0Z3.N204Z-4.N206G1Z-8.N208G0Z3.N210Z-6.N212G1Z-10.N214G0Z3.N216Z-8.N218G1Z-12.N220G0Z3.N222Z-10.N224G1Z-14.N226G0Z3N228Z-12.N230G1Z-16.N232G0Z3.N234Z-14.N236G1Z-18.N238G0Z3.N240Z-16.N242G1Z-20.N244G0Z3.N246X25.(下面是钻第二孔在此省略)|……N310G0Z3.N312M5N314G91G28Z0.M9N316G28X0.Y0.A0.N318M30在上面程序中,加下划线的都是与FANUC 0iMA系统不能兼容的,也就是需要修改或删除部分,归纳主要有以下几个方面:(1)程序的开头和结束;(2)第四轴,即A轴关闭;(3)刀具调用T1M6分行显示;(4)删除刀具注释;(5)将繁琐的钻孔循环转变为G81 83指令;(6)行号的省略输出,减少机床的空间占用。
IMS post后处理软件应用
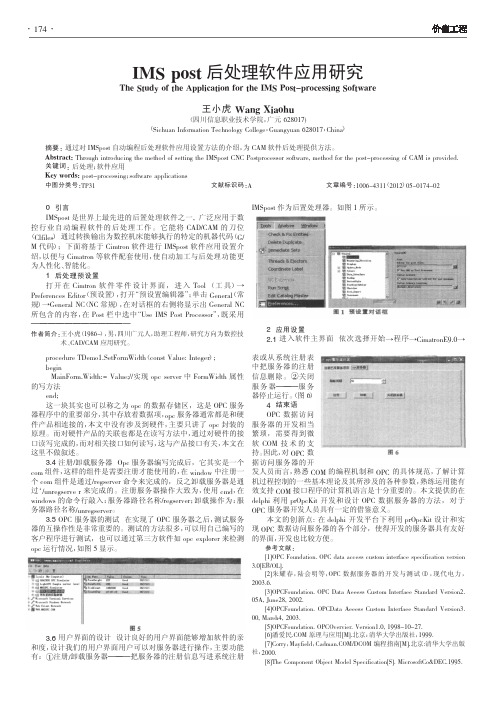
价值工程0引言IMSpost 是世界上最先进的后置处理软件之一,广泛应用于数控行业自动编程软件的后处理工作。
它能将CAD/CAM 的刀位(Clfiles )通过转换输出为数控机床能够执行的特定的机器代码(G/M 代码);下面将基于Cimtron 软件进行IMSpost 软件应用设置介绍,以便与Cimatron 等软件配套使用,使自动加工与后处理功能更为人性化、智能化。
1后处理预设置打开在Cimtron 软件零件设计界面,进入Tool (工具)→Preferences Editor(预设置),打开“预设置编辑器”;单击General (常规)→General NC (NC 常规),在对话框的右侧将显示出General NC 所包含的内容,在Post 栏中选中“Use IMS Post Processor ”,既采用IMSpost 作为后置处理器。
如图1所示。
2应用设置2.1进入软件主界面依次选择开始→程序→CimatronE9.0→———————————————————————作者简介:王小虎(1986-),男,四川广元人,助理工程师,研究方向为数控技术、CAD/CAM 应用研究。
IMS post 后处理软件应用研究The Study of the Application for the IMS Post-processing Software王小虎Wang Xiaohu(四川信息职业技术学院,广元628017)(Sichuan Information Technology College ,Guangyuan 628017,China)摘要:通过对IMSpost 自动编程后处理软件应用设置方法的介绍,为CAM 软件后处理提供方法。
Abstract:Through introducing the method of setting the IMSpost CNC Postprocessor software,method for the post-processing of CAM is provided.关键词:后处理;软件应用Key words:post-processing ;software applications中图分类号:TP31文献标识码:A文章编号:1006-4311(2012)05-0174-02procedure TDemo1.SetFormWidth (const Value:Integer );beginMainForm.Width:=Value;//实现opc server 中FormWidth 属性的写方法end;这一块其实也可以称之为opc 的数据存储区,这是OPC 服务器程序中的重要部分,其中存放着数据项,opc 服务器通常都是和硬件产品相连接的,本文中没有涉及到硬件,主要只讲了opc 封装的原理。
测试软件Probe使用指导1.0

江苏邮电建设工程有限公司第十分公司Probe使用文档华为产品刘毅2012-3-23目录1.1 概述 (3)1.2 GENEX Probe 简介 (3)1.3 GENEX Probe 软件安装 (3)1.4 GENEX Probe 软件狗License升级 (3)2.1 概述 (5)2.2 软件主界面介绍 (5)2.3 按键介绍 (5)2.3.1 Project按键介绍 (5)2.3.2 Logfile按键 (6)2.3.3 Configuration按键 (7)2.3.4 View按键 (7)2.3.5 Test 按键 (8)2.3.6 Help按键 (9)3.1 概述 (10)3.2 测试条件准备 (10)3.2.1 明确测试任务 (10)3.2.2 测试软件的检测 (10)3.2.3 测试路线的选择 (10)3.3 测试条件确认 (10)3.4 测试操作 (10)3.4.1 CPE测试操作流程 (11)3.4.1.1 测试软件的准备 (11)3.4.1.2 测试步骤 (11)3.4.2 TUE测试操作流程 (19)3.4.2.1 测试软件的准备 (19)3.4.2.2 测试步骤 (19)1.软件安装1.1概述本章将介绍如下内容●GENEX Probe 简介●GENEX Probe 软件安装1.2GENEX Probe 简介➢GENEX Probe是Huawei GENEX网规网优解决方案的重要组成部分,定位为路测前台软件,负责数据的采集、实时显示、记录,常与路测后处理软件GENEX Assistant配合使用;➢GENEX Probe的功能➢根据用户自选上报周期实时显示空口参数、测量指标➢地理化显示测量指标,直观展现网络质量➢通过配置测试计划自动执行测试任务➢记录测试数据,为分析网络性能或问题定位提供依据➢测试数据回放,再现测试时刻场景1.3GENEX Probe 软件安装按如下步骤安装GENEX Probe:➢进入Probe文件夹中的GENEX Shared,安装GENEX Shared,双击“setup.exe”文件;➢等待片刻,弹出“GENEX Shared – InstallShield Wizard”对话框。
中海达RTKHisurvey操作流程

软键盘:当手簿安装第三方输入法后,该选项可控制点击 输入框是否弹出第三方输入法的键盘。
中海达RTKHisurvey操作流程
七、设备相关
基准站的位置坐标:输入框中坐标为地面已知点坐标。
内置电台: 2W和5W电台在设置基准站/移动站的数据 链页面进行区分。
原始数据导出:
自定义导出由用户根据需要选择导出字段及字段顺 序。
空值字段用于占位符以确定其他字段顺序。 BLH字段表示BLH坐标为地面点BLH坐标(考虑了 点检验+天线高) NEZ字段表示倾斜测量改正后坐标。 倾斜NEZ字段表示倾斜测量改正前坐标。
中海达RTKHisurvey操作流程
四、坐标参数
1、坐标系统复用:dam文件导入、二维码分享、预定 义列表
注意:请不要再通过手动编辑 Ellipse.csv的方式添加,HiSurvey在这里与Hi-RTK的操 作方法是不同的!
中海达RTKHisurvey操作流程
五、底图导入(外部数据管理)
Hi-Survey的底图导入支持的格式包括:edt、ed2、dxf
中海达RTKHisurvey操作流程
六、软ቤተ መጻሕፍቲ ባይዱ配置
点放样基准方向:设置点放样进行前后向提示时使用 的参考线方向。
中海达RTKHisurvey操作流程
十、道路相关
道路放样或横断面采集前必须导入道路线路文件以加 载道路数据。
中海达RTKHisurvey操作流程
十、道路相关
Hi-Survey支持编辑的道路线路数据: 平断面:交点法(*.PHI)、线元法(*.sec)、
中海达RTKHisurvey操作流程
老虎SATWE-YJK后处理(含报价) -

8 主要优势:
7.基底反力转SAFE模型
当国内的基础软件,计算结果出现异常时,通常用美国的SAFE软件进 行验算。
老 虎
YJK/SATWE
后 处 理
9 主要优势:
8.独立基础平法和计算书
老 虎
YJK/SATWE
后 处 理
10 主要优势:
9.剪力墙暗柱编号
老 虎
YJK/SATWE
后 处 理
11 主要优势:
2 与同类后处理软件比较,主要优势:
1.模型检查
老 虎
后 处 理
a.同跨梁高度或宽度不一致,次梁比主梁高 b.框支梁跨高比,框支柱截面及砼强度等级 c.柱截面、墙厚度及砼强度等级上下层异常 d.梁配筋多于两排提示 e.梁剪力设计值接近规范限值提示
YJK/SATWE
3 主要优势:
2.梁截面优化建议
1 主讲人:
本软件要求用户熟悉混凝土规范,抗规,高规, 基础规范,AUTOCAD和YJK软件。 YJK 模型和计算结果对全部用户开放,而最近4 年PKPM不断封闭数据。 PKPM不能输出框柱剪跨比。
老 虎
YJK/SATWE
上海凯毕腾建筑科技有限公司
陈国祥
后 处 理
咨询:1994688708@ 技术支持:szjackie@
老 虎
YJK/SATWE
后 处 理
4 主要优势:
3.整层梁混凝土及钢筋用量统计,用于方案比 较。
老 虎
YJK/SATWE
后 处 理
5 主要优势:
4.贯通筋直径定义
支座顶面积8cm2,梁宽度200,根据不同定义程序会配如下解: (1)4D16 2/2 (2D16贯通)省贯通筋两排,直径16的比例是0.5 (2)2D18+1D20(2D18贯通) 省贯通筋一排,角筋非最大,第一排 钢筋比例为1.0 (3) 2D18/2D14(2D18贯通)省贯通筋两排,直径18的比例是0.625 (4)2D20+1D16 (2D20贯通)不省贯通筋,第一排钢筋比例为1.0
Hi-Survey (道路、电力)使用培训

精品文档
十、道路相关
道路放样或横断面采集前必须导入道路线路文件以加 载道路数据。
精品文档
十、道路相关
Hi-Survey支持编辑的道路线路数据:
平断面:交点法(*.PHI)、线元法(*.sec)、坐 标法(*.zline)
纵断面:变坡点+高程(*.PVI)纵断面编辑不涉及 坐标输入,即使纵断面资料里有起点坐标时,可以 不用输入,只关注变坡点即可,V1.1.6以后允许输 入平坡(L1、L2可以为0)
十二、杆塔放样、塔基断面测量
电力作业流程: 平断面测量———塔基断面测量———杆塔放样
添加杆塔库; 根据参数计算拉线分坑位置; 沿线断面测量; 杆塔中心点及坑位放样;
精品文档
电力杆参数说明
十三、后处理软件
处理电力点及塔基断面文件;
电力文件: 1、导出SLGPS接口样式二文件; 2、导出道亨OOG原始表单格式文件; 3、导出Dxf文件
横断面:坡度+距离(*.TPL)
精品文档
十、道路相关
横断面采集
1、中桩点:用于采集横断面的实际高程。
2、来回采集:一种采集工作模式。详见横断面来回采 集说明
3、不论是否启用“来回采集”,每个横断面必须在正 确指定横断面的里程后采集中桩点。
4、手动中桩点:在采集过程中未采集中桩点时使用。 获取中桩点的方法:
基站坐标检测:对连接的移动站收到的基站坐标进行监测, 当基站坐标发生变化时,进行相应提示。
软键盘:当手簿安装第三方输入法后,该选项可控制点击 输入框是否弹出第三方输入法的键盘。
精品文档
七、设备相关
基准站的位置坐标:输入框中坐标为地面已知点坐标。
第五章LS-DYNA后处理软件lsprepost功能介绍.

None -使所有的 parts 不可见
Rev – 转换激活和没有激活的parts Auto – 模型将自动重划,无论何时进行选择 ,否则需要按下“Apply” 按钮来更新窗口 Done – 完成和退出选择 part 界面
ASCII 数据文件界面
ASCII 文件列表包含LSDYNA输出的22个ASCII数据 库文件的名字 • 带有星号 (*)的名字表示该文件在当前目录中 存在 •带有加号 (+) 的名字表示该文件的数据已经加载到 了内存中 •File – 使用文件选择框输入打开的文件名 • Load –当名字带有星号 (*)时,打开和加载ascii 数 据 •Uload – 从内存中卸载数据 • Raise – 唤醒所有的xy 图形窗口 • Pop – popup所有关闭的xy图形窗口 • Done – 退出 ASCII 界面
第十二章
LS-Prepost 1.0 版
——LS-DYNA的一后处理器
键盘和鼠标操作
•动态模式操作
旋转 — 鼠标左键 + shift 键 平移 — 中间键+ shift 键 缩放 — 鼠标右键 + shift 键 •快速视图模式 – 使用CTRL键代替 shift 键是视图以edge 模式显示 •单个拾取 -鼠标左键 •面积拾取或窗口 – 左键单击并拖动 •多边拾取 -左键单击、拖动和单击,右键终止
.Residu – 残余应变 .Apply – 施加选择的成分并显示 fringe 结果
e 范围设置
动态范围—范围由各个帧计算获得
静态范围 – 范围由所有帧计算获得 用户定义 – 用户输入范围的最大和最小值 显示范围 – 显示仅在范围之内的单元 整个模型 –范围基于整个模型计算 仅对激活的 part –范围基于激活的 parts计算 (可见的 parts) 不平均–每一个单元一个颜色
Dynaform后处理 eta post 1.81应用手册中文版
eta/POST应用手册版本1.8.1美国工程技术联合公司Engineering Technology Associates, Inc.1133 E. Maple Road, Suite 200Troy, MI 48083电话:+1 (248) 729 3010传真:+1 (248) 729 3020电子邮件:support@Engineering Technology Associates, Inc.,ETA,ETA徽标和eta/DYNAFORM都是美国工程技术联合公司的注册商标。
所有的商标和名称都是由ETA版权所有。
版权所有 ©1998-2010美国工程技术联合公司声明本手册所提及的概念、方法和实例仅为说明及培训之目的,并不意欲应用于实际工程分析和设计。
本手册中所提供的材料参数仅作为参考。
任何个人或公司因使用本手册中包含的信息而造成的直接或间接损失,美国工程技术联合公司不对其承担任何责任。
概述概述eta/POST是ETA公司开发的一款能够快速判读和评定LS-DYNA分析结果的强大可视化工具。
它提供等值线云图、矢量图、变形图、FLD、应力分布、动画及云图动画等帮助用户快速准确的分析计算结果。
提供曲线图帮助用户查看LS-DYNA分析结果中的时间历史曲线,同时提供丰富的工具转化和理解模拟分析结果。
例如:显示设置的操作(标记,颜色等),丰富的高级曲线过滤技术(FIR,SAE,Butterworth,Averaging等)和不同结果的计算等。
对任何分析而言,文档编制也是一个非常重要的环节。
eta/POST提供了对图形的直接、高质量的打印和绘图功能。
通过一条简单的复制命令可以将图形导出到其他程序中。
例如:可以轻松地将图片导出到常用的文字处理程序如MICROSOFT WORD、MICROSOFT POWERPOINT和ADOBE FRAMEMARKER等中,或是导出到电子表格、数据库、桌面印刷软件以及画图和插图程序中。
ABAQUS常见问题汇总 - 1.0版
ABAQUS常见问题汇总 - 1.0版作者:aba_aba2006.06.14在SIMWE论坛注册5个月以来,在ABAQUS版回帖860篇,知无不言,言无不尽。
在此整理一下,以方便大家查找。
下面绝大多数是我的回帖,有少部分是其他网友的回答,都注明了作者。
下面只摘录了帖子中的一些主要内容,有些地方可能上下文不太连贯,完整的讨论请大家根据相应链接去论坛上察看。
如果这些内容对你有帮助,希望你也能常上论坛来回答一下别人的问题。
众人拾柴,火焰才高。
目录点击小节标题,可以跳到相应的内容(有些WORD版本可能需要按住ctrl键)1. 论坛提问要诀 (4)2. 故障诊断基本方法 (4)3. 约束刚体位移 / NUMERICAL SINGULARITY (4)4.过约束(Overconstraint) (7)5.其他常见error和warning信息 (7)6.ABAQUS无法运行(安装、License、环境变量) (10)7.弹塑性分析 (14)7.1 塑性问题不收敛的常见现象 (14)7.2 接触问题和塑性材料不要用二阶单元 (14)7.3 不要在塑性材料上施加点载荷 (15)7.4 塑性材料参数 (15)7.5 屈服准则 (18)7.6 后处理 / 判断材料是否屈服 (20)8. 接触分析 (22)8.1 接触分析不收敛的常见现象和解决方法 (22)8.2 接触面上的网格密度 (22)8.3 接触面的法线方向 (23)8.4 过盈接触 (23)8.5 管土/桩土接触 (25)8.7 凹坑成型的接触问题 (34)8.8 刚体穿透 (37)8.9 接触力 (37)8.10 Explicit中的接触问题 (38)8.11 改变接触状态 (40)8.12 其他与接触有关的Error和Warning信息 (41)9. 各个量的单位 (42)9.1 各个量的单位要相互一致 (42)9.2 时间/增量步的含义 (44)10.导入 / 修改 / 求解inp文件 (45)10.1 把inp文件导入ABAQUS/CAE (45)10.2 运行inp文件 (46)10.3 修改inp文件 (47)11.用户子程序和FORTRAN (49)12.创建/修改part (50)13.在Assembly中定位 (51)14.划分网格 (52)15.选择单元类型 (54)16.截面属性和材料 (56)16.1 定义截面属性 (56)16.2 用OFFSET参数偏置shell的中性面 (57)16.3 材料属性 (57)17.载荷 / 速度场 (58)17.1 集中力 (58)17.2 线载荷 (59)17.3 面载荷 (60)17.4 Body Force / Gravity (60)17.5 随时间变化的载荷 / Amplitude (61)17.6 在实体单元上施加弯矩 / 旋转速度 (62)18.边界条件 (67)19.定义Set / 选取模型的局部 (67)20.弹簧 (68)21.约束(coupling, tie) (68)22.后处理 (69)22.1 显示局部坐标系上的结果 (69)22.2 绘制曲线(X–Y data) (69)22.3 field output / history output (70)22.4 显示结果 (71)22.5 输出shell积分点上的应力和应变 (73)23.多步骤分析 (74)23.1 重启动分析(Restart) (74)23.3 用*import 把计算结果传递到下一个过程中 (74)24.岩土分析 (75)24.1 初始地应力平衡 (75)24.2 基坑开挖 (77)24.3 钢筋混凝土(Rebar Layer和Embedded Element) (77)24.4 实体单元的截面力/弯矩/转角 (78)24.5 软土固结 (80)25.热分析 (81)26.动态分析 (83)26.1 Explicit分析 (83)26.2 分析结果与amplitude不一致 (84)26.3 固有频率 (84)26.4 *DYNAMIC分析 (85)27.屈曲分析 (86)28.裂纹 (87)29.连接单元(CONNECTOR) (88)30.惯性释放(INERTIA RELIEF) (88)31.非线性问题的算法 (89)32.ABAQUS和其它软件的比较 (89)33.使用ABAQUS帮助手册 (90)34.论坛的“全文搜索”功能 (90)35.关于找枪手 (91)1. 论坛提问要诀在论坛上的提问是否能够得到解答,在很大程度上取决于提问的方式。
COMSOL使用技巧_V1.0_2013-02
COMSOL使用技巧目录一、几何建模 ................................................................................................................................. - 1 -1.1组合体和装配体 ................................................................................................................. - 1 -1.2隐藏部分几何 ..................................................................................................................... - 2 -1.3工作面 ................................................................................................................................. - 3 -1.4修整导入的几何结构 ......................................................................................................... - 4 -1.5端盖面 ............................................................................................................................... - 11 -1.6虚拟几何 ........................................................................................................................... - 12 -二、网格剖分 ............................................................................................................................... - 14 -2.1交互式网格剖分 ............................................................................................................... - 14 -2.2角细化 ............................................................................................................................... - 16 -2.3自适应网格 ....................................................................................................................... - 16 -2.4自动重新剖分网格 ........................................................................................................... - 18 -三、模型设定 ............................................................................................................................... - 19 -3.1循序渐进地建模 ............................................................................................................... - 19 -3.2开启物理符号 ................................................................................................................... - 19 -3.3利用装配体 ....................................................................................................................... - 21 -3.4调整方程形式 ................................................................................................................... - 22 -3.5修改底层方程 ................................................................................................................... - 23 -四、求解器设定 ........................................................................................................................... - 25 -4.1调整非线性求解器 ........................................................................................................... - 25 -4.2确定瞬态求解的步长 ....................................................................................................... - 26 -4.3停止条件 ........................................................................................................................... - 27 -4.4边求解边绘图 ................................................................................................................... - 28 -4.5绘制探针图 ....................................................................................................................... - 29 -五、弱约束的应用技巧 ............................................................................................................... - 31 -5.1一个边界上多个约束 ....................................................................................................... - 31 -5.2约束总量不变 ................................................................................................................... - 32 -5.3自定义本构方程 ............................................................................................................... - 34 -六、后处理技巧 ........................................................................................................................... - 36 -6.1组合图形 ........................................................................................................................... - 36 -6.2显示内部结果 ................................................................................................................... - 37 -6.3绘制变形图 ....................................................................................................................... - 38 -6.4数据集组合 ....................................................................................................................... - 39 -6.5导出数据 ........................................................................................................................... - 39 -七、函数使用技巧 ....................................................................................................................... - 43 -7.1随机函数 ........................................................................................................................... - 43 -7.2周期性函数 ....................................................................................................................... - 44 -7.3高程函数 ........................................................................................................................... - 45 -7.4内插函数 ........................................................................................................................... - 46 -八、耦合变量的使用技巧 ........................................................................................................... - 48 -8.1积分耦合变量 ................................................................................................................... - 48 -8.2拉伸耦合变量 ................................................................................................................... - 49 -九、ODE的使用技巧 ................................................................................................................... - 50 -9.1模拟不可逆形态变化 ....................................................................................................... - 50 -9.2反向工程约束 ................................................................................................................... - 51 -十、MATLAB实时链接 ................................................................................................................ - 52 -10.1同时打开两种程序GUI ................................................................................................. - 52 -10.2在COMSOL中使用MATLAB脚本................................................................................ - 52 -10.3在MATLAB中编写GUI ................................................................................................. - 53 -10.4常用脚本指令................................................................................................................ - 54 -十一、其他 ................................................................................................................................... - 56 -11.1局部坐标系.................................................................................................................... - 56 -11.2应力集中问题................................................................................................................ - 56 -11.3灵活应用案例库............................................................................................................ - 57 -11.4经常看看在线帮助........................................................................................................ - 57 -11.5临时文件........................................................................................................................ - 58 -11.6物理场开发器................................................................................................................ - 59 -一、几何建模COMSOL Multiphysics提供丰富的工具,供用户在图形化界面中构建自己的几何模型,例如1D中通过点、线,2D中可以通过点、线、矩形、圆/椭圆、贝塞尔曲线等,3D中通过球/椭球、立方体、台、点、线等构建几何结构,另外,通过镜像、复制、移动、比例缩放等工具对几何对象进行高级操作,还可以通过布尔运算方式进行几何结构之间的切割、粘合等操作。
天纳克SCR后处理介绍

Hale Waihona Puke 1.3尿素泵接口定义及检测方法 1.5代尿素泵插接端子 1.0代尿素泵插接端子
针脚 定义 针脚 定义 A 电机旋转方向 H B J C K 尿素压力传感器负 电机控制 D L 尿素泵加热负 E 电瓶电源负 M 尿素压力传感器输出 F G CANL CANH N 尿素压力传感器正极 P 电瓶电源正极
S1160010-1099 尿素箱总成 1160104-D796 1160105-D796 1160106-D796 尿素管-尿素箱到尿素泵 尿素管-尿素泵到喷嘴 尿素管-喷嘴到尿素箱
二、后处理部分零件检测及故障排除 1、DCU及尿素泵总成 1.1、1.0代DCU及尿素泵总成
1.2、1.5代DCU及尿素泵总成
尿素液位传感器原理图:
数据中标定了尿素箱容积,一般尿素箱容积分16升和35升,如果数据错误 ,会导致尿素液位显示不正确。 Ø同一台车,两种数据显示的液位不同:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
结构后处理软件探讨-----JZFZ结构三室杜明军等本文主要针对梁板柱构件的后处理制图软件进行探讨,以便提高绘图效率,下面分构件类型进行叙述一、板筋绘制1.PKPM模型生成板施工图流程PKPM计算板筋→PKPM绘制板筋→板王前处理设置→板王导入板施工图→板筋后处理(1)PKPM计算板筋需将模型中的降板关系修改正确,以便在生成施工图时,板筋自行断开。
绘图参数对话框设置:按照下图进行设置即可!(2)PKPM绘制板筋PKPM生成的板筋存在以下的不足:简支边钢筋伸入板内长度并非到梁边的距离;负筋伸入板内长度并不都是50的整数倍;由于建模过程的不准确导致PKPM绘出的板筋并不能与模板图对应等等。
(3)板王处理前设置●【设置】>【钢筋参数设置】●【设置】>【参数编辑器】该设置可以让导入后的板筋施工图的支座负筋只有一侧有长度标注,可以使图面更加简洁!(如果此处没有进行该设置便导入了板筋施工图,也可以在“板筋编辑——负筋只标一侧”下进行编辑达到相同的效果)(4)板王导入板筋施工图:●【板转图/读原图数据—板转图/转换到用户图】●【板转图】>【读原图数据】:在PKPM.DWG文件中读取原图数据,执行该命令后根据命令提示进行操作,注意此步骤中需要输入一个定位点,该点最好是数值模型中较为准确的点(如竖向构件的边界点等)。
●【板转图】>【转换到用户图】:在执行该命令之前还需要做一些工作,由于本公司采用参照文件的方式作图,而目前板王在转图过程中并不能识别参照文件的图层,因此在处需要增加一个步骤,即将模板图中的梁、竖向构件等以相同的基点复制到板筋施工图中。
在绘制板筋施工图的模板中,执行“转换到用户图”命令,根据命令行提示选择梁、柱、墙图层;另外,需要注意的是此步中仍需输入一个定位点,此点必须与上一步中的定位点位置对应。
经过此步的处理,板筋施工图已经基本成型:将简支边钢筋伸入板内长度修改为到梁边的距离;2)导入后的板正负钢筋位置与模板相应位置基本对应;但是仍有部分负筋伸入板内长度不是50mm的整数倍。
(5)板筋后处理:注意在使用“板筋编辑”下的功能之前必须先执行“板筋编辑——识别任意板”对用户模板进行识别,否则其下的功能将不能使用或者报错。
板筋的后处理包括:板筋编辑、板筋删除、板筋绘制等。
此处仅对较为常用的部分功能进行介绍:●【板筋编辑】>【双层双向】执行该命令后,根据提示选取某一个方向的基准配筋钢筋(也可随意选择某方向的任意钢筋,基准配筋值可在稍后选项中进行修改);框选需进行双层双向配置的范围,程序自动将所选范围内与基准钢筋同方向的其他钢筋筛选出来;右键单击弹出“配置附加钢筋”对话框,如下图:在该对话框中可以对“基准钢筋配筋”进行修改,另外需注意的是对话框中的“配附加筋”必须逐一进行人为干预,否则执行完命令之后图面上并不是附加钢筋,而是原规格的钢筋造成错误!按照上述方法可将所有方向上的板筋进行双层双向附加!●【板筋删除】>【删配筋相同钢筋】:针对附注中经常有“未画出支座负筋为φ8@200”的情况,可采用该命令一次性删除所有φ8@200文字及相应支座负筋符号;●【板筋删除】>【删相同规格文字】:针对附注中经常有“未注明支座负筋为φ8@200”的情况,可采用该命令一次性删除所有φ8@200文字,但却可以保留相应支座负筋符号;(6)其他说明:为了快速判定支座负筋伸入板内的长度是否满足要求,可采用“板校核——校核负筋长”命令一次性校核所有负筋伸入板内长度是否满足要求;另外也可采用“板校核——显示房间跨度”逐一查询各板板跨,并且程序可以自动判定该板支座负筋伸入长度是否满足要求;2.YJK模型生成板筋施工图(1)YJK板筋绘制:“YJK——施工图设计——板施工图”中的批量打印功能可以一次性修改计算参数、计算并生成板配筋面积、板筋施工图、板挠度图、板裂缝图等,而无需PKPM那样逐层设置参数、逐层计算、逐层布筋、逐层转图等操作,可大大提升效率!异形板程序自动采用有限元方法划分网格进行计算,无需单独进行有限元分析;只要在“计算参数”中的“负筋长度取整模数”设置为50,则负筋伸入板内长度均为50的整数倍;钢筋伸入板内长度并非到梁边的距离而是到梁中线的距离;2)由于建模过程的不准确导致YJK绘出的板筋并不能与模板图对应(这也是模型建立不准确的通病);3)YJK绘制的板筋施工图中板底筋有斜勾等等(2)YJK板筋导入板筋施工图:YJK生成的施工图不能直接用板王导入板筋施工图中,而要先对图形进行转换,在SlabPm*.dwg(YJK生成的板筋施工图)中执行CONVERT命令,根据命令提示依序输入“选项P——选项A”,将图中的多段线进行转换!之后的操作则与PKPM生成板筋施工图的操作方式相同!但是需要注意的是在执行“板转图——转换到用户图”的命令时“用户模板的放大系数”则应该设置为1,因为YJK 生成的施工图比例已经是1:1,无需放大!二、梁配筋绘制1.主要工具:老虎后处理软件及广厦2.两种软件的优缺点(1)其中地下室梁图使用老虎后处理软件,主楼梁图使用广厦或广厦;(2)广厦生成梁图,整体避让效果不错,存在的不足:LL生成有跨数,如LL(1);局部传力复杂的地方,跨数可能不正确;(3)老虎后处理生成梁图,准确度高,存在的不足:避让效果不是特别好。
3.梁图生成参数设置(1)省不省贯通钢筋●不省贯通筋:大直径钢筋在角部或第一层;省贯通筋:小直径钢筋在角部或第一层。
省直通筋一排:●要求顶筋必须在一排内放下,如果顶筋超过一排,贯通筋直径为用户定义的最大钢筋直径;适用于框架柱结构层。
●省直通筋二排:要求顶筋必须在两排内放下,如果顶筋超过两排,贯通筋直径为用户定义的最大钢筋直径;适用于剪力墙/异形柱结构层省直通筋二排可输入第一排钢筋面积所占SATWE顶计算面积的比例。
如果用户想贯通筋直径大于18时用“省直通筋二排”,否则用“省直通筋一排”;如果用户选择“省直通筋一排”,贯通筋直径小于18时将按“不省贯通筋”方法决定。
(2)梁支座为墙柱,编号断开:此参数用于基础梁平法施工图的绘制(用于在PMCAD中将基础梁建入模型,将基础荷载反向加入的基础建模方式),勾选此项,基础梁将以墙柱作为支座,并将基础梁编号断开。
(3)其它箍筋设置参数:框梁及次梁的实配箍筋和用户定义一致时,CAD梁平法施工图箍筋不输出集中标注,只输出总说明, 上图“次梁宽度小等于…”和实配箍筋无关。
(4)顶/ 底截面一种钢筋直径:勾选此参数,程序将梁第一排钢筋采用相同直径。
当有2排钢筋时,第二排钢筋不受此限制,需加选“顶底截面多排一种钢筋直径”。
见混凝土规范11.6.7条。
(5)支座顶筋面积/最小大于4顶筋按省贯通筋,二排配:同一编号的梁当跨度相差比较大时,某一跨的顶筋面积比其它跨的最小顶筋面积4倍还多时,此跨的贯通筋直径由“贯通筋,二排配”方法决定。
(6)柱支座顶筋拉通系数:柱/墙两侧梁配筋有时相差较大,如果全部拉通设置,比较浪费;所以在此留设参数,用户可设置当两侧梁配筋相差多少时可以拉通。
(7)柱墙梁等宽保护层厚度(墙端梁保护层厚度):实际设计中梁与墙平面内相交时,往往由于墙体暗柱配筋与梁纵筋相交过密,而难以施工,故此处开放本参数便于用户控制。
此数填50,200的墙厚放不下3根14,50+50+30+30+3*14=202mm,如果底也是两根,此数填55,55+55+25+25+3*14=202mm;同理此数填75,250的墙厚也只能放两根钢筋。
当柱和梁的宽度差小于(墙端梁保护层厚度- 梁侧保护层厚度)*2时,此数也影响根数计算。
默认厚度= 墙保护层15 + 墙暗柱箍筋或墙身水平筋直径12 + 墙暗柱主筋直径25 = 52mm。
(8)楼板厚度:只和腰筋配置有关,当梁的腹板高度大于等于450mm时,程序按0.1%bhw计算单边腰筋。
(《混凝土设计规范》7.5.1中定义了梁的腹板高度;截面的腹板高度:对矩形截面,取有效高度;对T形截面,取有效高度减去翼缘高度;对I形截面,取腹板净高。
);需要说明的是:如梁抗扭,需配抗扭腰筋,Hw比450少时,程序也按满足0.1%*b*Hw控制,腰筋根数按(H矩形梁高- 用户定义板厚- 底筋直径/2)/200取整计算。
(9)箍筋最大肢距:350宽次梁,最大箍筋肢距修改为250,可配4肢箍,最大箍筋肢距为非框梁的,框架梁最大箍筋肢距取规范和此定义的小值。
(10)相邻墙连接:当地下室墙特别复杂, 程序可能出错, 此时不要选“相邻墙连接”(程序会提示)(11)次梁首尾跨非铰接底筋修正:假设顶钢筋面积为A, 底钢筋钢筋面积为B; 如果B>A, 底钢筋取B+A/2, 否则底钢筋取B+A4.梁平法配筋图绘制梁集中力输出:以便复核吊筋集中标注单设图层:以便利用后期的一些插件出来不标注构造腰筋:结构设计总说明中已经明确文字高度:建议住宅的文字高度取为2.55.修改梁图使用的工具(1)转换成公司标准图层工具(2)老虎板王的平法移动功能(3)老虎板王的屏幕改字功能(4)字体变色插件三、剪力墙施工图绘制(TSPT、老虎板王(墙柱工具插件))1.TSPT墙施工图绘制(1)TSPT生成平面及详图TSSD2012→TSPT生成墙施工图编号及详图●【搜索相关规定】:根据项目中墙柱的具体大小进行相应调整;墙体最小长度比:4(根据高规),小于此比例就默认为柱;●【约束暗柱】:暗柱长与LC长相关:当暗柱的肢长与LC的长度相差小于一个纵筋间距时,暗柱长度加长至LC的长度●【是否角筋加强】:是指当实配暗柱纵筋面积超过计算结果的0.3倍时,就把暗柱的角筋以外的纵筋直径减小;箍套和拉筋直径不同:是指当实配暗柱箍筋面积超过计算结果的0.5倍时,就把暗柱的拉筋的直径减小【拉筋的设置方式】:通常采用逐根设置,也可以根据项目的情况进行修改;【Lc拉筋的设置方式】:通常采用逐根设置,也可以根据项目的情况进行修改;【比例】:根据公司习惯,大样图比例修改为1:25;抽筋图比例改为1:50(2)埋入轴压比通过【埋入轴压比】命令,可以将计算模型中的轴压比埋入都剪力墙底图中,以便后续生成边缘构件的时候,按照规范相关规定生成对应的边缘构件。
轴压比埋入到图中以后,满足规范要求时,显示为紫色;不满足规范要求或墙与轴压比值没有对应上,显示为红色。
(3)搜索图面此处可以针对图中的暗柱、墙身及墙梁进行搜索,搜索前须根据项目的具体情况修改纵筋间距、抗震等级、地震烈度及边缘构件的类型;此处的最小净距是指两个暗柱合并的最小间距;可以选择局部或全图的搜索方式。
约束和构造的暗柱搜索出来颜色不同,约束的为深蓝色,构造的为浅蓝色;搜索暗柱时如果已埋入轴压比,则软件根据轴压比值,按照规范的构造要求进行生成。