分布交互仿真.ppt
第三章 分布交互仿真
SNE 内部动态交互:如 风 - 浪、雨 - 湿等;
座舱仪表:指针指示 图形指示 实况指示;
分布式飞行仿真系统
飞机系统 发动机 通讯 导航 仪表 自动飞行 操纵负载 动力学 电子对抗 雷达、火控、武器 视景 视 音响 听 液压运动系统 触 攻击目标 场景 控制台
飞行管理
虚拟环境
1.2 DIS设计原则
第三章 分布交互仿真
第一节 DIS
1.1 分布交互仿真概述 DIS 定义:采用标准协议,以计算机网络将分散于各地的仿真 设备互联,构成综合交互仿真环境,用于工程研究、军事训练、 效能评估。 历史:1983 SIMNET、1989 DIS、1990 ALSP、 1995 HLA、现在 SBA、VP。 DIS 特点:分布性、交互性、实时性。 仿真类型: 虚拟仿真:人在虚拟环境中操作虚拟实体进行的仿真; 构造仿真:CGF 在虚拟环境中操作虚拟实体进行的仿真;
澎湖列岛
基隆 桃园 台北 宜兰
台中 花莲 制空权
登陆:桃园 基隆 高雄。
空袭:台中 花莲 台南 屏东 台东。
计划搁置:由于朝鲜战争爆发,共 军主要力量投入抗美援朝,同时美 国第七舰队进入台湾海峡,攻打台 湾计划被搁置。
台南
高雄 屏东 台东
台北战场: 占领桃园、宜兰、基隆三个战区,合围台北,堵逃打援。 桃园战区包围台北西面;宜兰战区、基隆战区合围台北东面 两个方向,防止敌首从海线突围,阻止海外势力从此登陆驰援, 宜兰战区还肩负阻止东线敌援军。 形成三战区合围之势即开始谈判,力争和平解放台北。 高雄战场: 拖住台中南部国军;部分海军负责打击澎湖列岛,保护共军 南部进攻线左翼;空袭和骚扰集中在台南、屏东两地,打击南下 和出山的援军。 攻势配合:
3)协议数据单元 PDU(五族27种类型) PDU族 一、实体与交互 PDU类型 1 实体状态 注释
软件工程-计算机仿真-课件-分布交互仿真HLA
分布交互仿真
2.1.2 HLA接口规范(1)
HLA接口规范
– 定义了联邦成员之间以及成员与联邦之间进行交互 的规范,接口规范分为六个方面:
• 联邦管理服务:包括联邦的创建与注销、联邦成员的加 入与退出、联邦状态的存储与恢复、设置同步点等。
– 2000年9月,由IEEE计算机界的仿真互操作标准委 员会(SISC)发起的基于DMSO HLA定义1.3版本 进行讨论修改的IEEE M&S HLA 标准系列IEEE P1516、1516.1、1516.2/D5经IEEE标准协会(SA) 投票批准,已成为正式的IEEE标准。
– 美国国防部规定,2001年后所有国防部门的仿真必 须与HLA相兼容。
规则1:联邦应该有一个联邦对象模型FOM, 该FOM应与HLA的OMT相兼容。
• FOM是一组表,记载运行时成员间交换数据的 协议及数据交换的条件,它是定义一个联邦的基 本元素。采用OMT格式对FOM进行记录是为了 更好的对其进行理解、重用。
FOM
Object
MOobdjeelct Class IdSetnIrntuitcfeitcruaarcteitoion n TTaaCSbbtlrlaeeusAcstTtuPtrraaeibrbaluemteeter
• 成员在联邦运行中向其它成员公布自己所负责建 模的对象的属性的值,及借助于RTI提供的服务 接收自己想要的来自其它成员的属性数据是各个 联邦成员的责任。
分布交互仿真
2.1.1 HLA规则(9)
规则8:成员应能按SOM中的规定,在 联邦执行期间动态地转移与接收属性的 所有权。
基于HLA的分布交互仿真数据收集系统的研究

基于HLA的分布交互仿真数据收集系统的研究在科技的广阔海洋中,基于HLA(High Level Architecture)的分布交互仿真数据收集系统犹如一艘精密的航船,其设计之巧妙、功能之强大,不禁让人赞叹。
这项技术的核心在于其高效的数据处理能力和卓越的交互性能,它能够在复杂的仿真环境中稳定运行,为科研人员提供准确的数据支持。
首先,让我们来探讨这个系统的数据处理能力。
正如一台强大的引擎能够推动航船破浪前行,基于HLA的数据收集系统拥有出色的数据整合和处理功能。
它能够将来自不同仿真节点的数据进行汇总、分析和存储,就像一个巧手园丁精心修剪枝叶,使得信息的流动更加有序和高效。
这种能力在大型仿真项目中尤为重要,因为它能够确保数据的一致性和完整性,避免信息孤岛的出现。
其次,我们不得不提的是这个系统的交互性能。
在这个系统中,各个仿真节点之间的通信就像一场精心编排的交响乐,每个部分都在和谐地协作,共同创造出美妙的旋律。
基于HLA的架构允许各个仿真节点之间进行实时的数据交换和更新,这就好比是一群舞者在舞台上同步起舞,每一个动作都精确无误,每一次转身都恰到好处。
这种高度的交互性不仅提高了仿真的效率,也增强了结果的可信度。
然而,尽管这个系统如此优秀,但它并非没有挑战。
正如航船在海上航行时可能会遇到风浪和暗礁,基于HLA的分布交互仿真数据收集系统在实施过程中也可能面临兼容性和扩展性的问题。
这就要求我们在设计和实施时必须谨慎行事,确保系统的稳定性和可靠性。
同时,随着技术的不断进步,我们也需要不断地对系统进行升级和维护,以适应不断变化的需求。
此外,安全性也是我们不能忽视的一个重要方面。
在这个信息时代,数据的安全性就如同航船上的救生设备一样重要。
我们必须确保所有的数据传输都是加密的,防止任何未经授权的访问和篡改。
这不仅是对用户负责的表现,也是维护系统声誉的必要措施。
综上所述,基于HLA的分布交互仿真数据收集系统是一项令人瞩目的技术成就。
MATLAB基础-simulink交互式仿真集成环境PPT课件
Simulink
1.2 建立Simulink仿真模型
a) 选取模块或模块组
b) 模块拷贝及删除 在模块库中选中模块后,按 住鼠标左键不放并移动鼠标 至目标模型窗口指定位置, 释放鼠标即完成模块拷贝。 模块的删除只需选定删除的 模块,按Del键即可。
MATLAB与通信仿真
Simulink
• 变换模块名的显示位置:Format 菜单中的Flip name可将模 块名换到对称的位置,Hide name可将模块名隐藏起来。
MATLAB与通信仿真
Simulink
1 Simulink 基本操作
1.3 系统仿真运行 1. Simulink模型窗口下仿真 步骤 ① 打开Simulink仿真模型窗口,或打开指定的.mdl文件; ② 设置仿真参数:在模型窗口选取菜单【Simulation: Parameters】, 弹出 “Configration Parameters” 对话框,设置仿真参数,然后 按【OK】即可;
MATLAB与通信仿真
Simulink
使用Simulink仿真的步骤:
• 建构正确的系统模型。 • 利用仿真工具去分析模型。 • 判断仿真输出结果,并修正模型。 • 重复上述过程,以实现系统的最优化。
模型 建模
+
模型
-
分析
显示
修正
MATLAB与通信仿真
Simulink
本部分主要内容如下: 1 Simulink基本操作 2 模块库和系统仿真 3 子系统创建与封装 4 Simulink仿真举例
➢ 常用的子模块库有Sources (信号源),Sink(显示输出), Continuous( 线 性 连 续 系 统 ) , Discrete(线性离散系统), Function & Table(函数与 表 格 ) , Math( 数 学 运 算 ) , Discontinuities (非线性) 等。
分布交互式仿真中的高性能时钟设计问题研究
基于FCS的分布交互仿真系统的设计与实现

‘
套真正的分布式网络控制
平台。目前,在工业控制
-
成功的当属现场总线控制
文主要从此角度出发,介
N /N CC C实时多任务控制软件包、组态 软件和应用软件 。上位机的主要功能包 括系统组态、 数据库组态、 历史库组态、
图形组态 、控制算法组态 、数据报表组
) ) 构, 即采用虚拟 现 I 结 S
和计算机 网络技术,为武 供 一个分布、交互、实时
-
以利用 P C丰富的软硬件资源 。
() 3 系统的效率高。 在F S C 中, 台 一
境 ,先进的实时仿真建模 景仿真,分布交互仿真开
2 F S对计算机控制系统 的影响 .C
传统 的计算 机控 制系统 一般 采用 D S C 结构。在 D S中,对现场信号需要 C 进行点对点的连接, 并且I / 0端子与P C L 或控制仪表一起被放在控 制柜 中,而不
维普资讯
李玉华 等
本文作 者李玉华女士, 中国船舶工业总公司
第 70 l 研究所高级工程 师; 吴崦先生 ,工程 师 吴道 虎先生,华中科技大学博士后;郭江先生
; 仿真
系统设计
硬件 / 软件
和控制技术为一体,是一种全分散 、全
数字、全开放的当代最先进的计算机控
的基础,提高 了控制系统 的信息处理能 力和运行可靠性,节省了系统的硬件和 布 线费用 ,方便 了用户对 系统 的组态 、
管理和维护。
性 好, 更新换 代容易 。程序设 计采用 IC 13 — 5 国际标准编程语 言,编 E 6 13 种 1
程和开发工具是完全开放的,同时还可
分布交互式仿真的发展历程和趋势
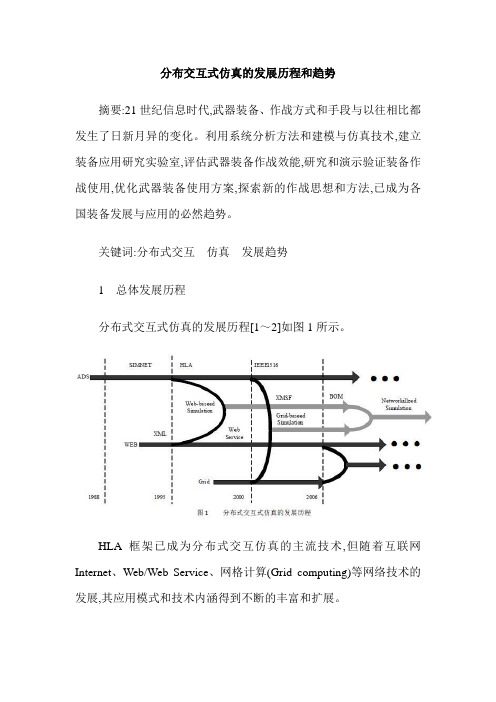
分布交互式仿真的发展历程和趋势摘要:21世纪信息时代,武器装备、作战方式和手段与以往相比都发生了日新月异的变化。
利用系统分析方法和建模与仿真技术,建立装备应用研究实验室,评估武器装备作战效能,研究和演示验证装备作战使用,优化武器装备使用方案,探索新的作战思想和方法,已成为各国装备发展与应用的必然趋势。
关键词:分布式交互仿真发展趋势1 总体发展历程分布式交互式仿真的发展历程[1~2]如图1所示。
HLA框架已成为分布式交互仿真的主流技术,但随着互联网Internet、Web/Web Service、网格计算(Grid computing)等网络技术的发展,其应用模式和技术内涵得到不断的丰富和扩展。
2 发展中遇到的问题随着Agent理论的逐渐成熟、Agent开发平台的逐渐应用于实际的开发,Agent技术在作战仿真的应用领域也逐渐展开,在国外已成功的应用于一些大型复杂的作战仿真系统,在国内,很多科研院所对Agent应用于作战仿真的理论进行了比较深入的研究,并开发了一些面向Agent的仿真平台,但还没有成熟的大型的面向Agent的作战仿真系统,尤其是Agent应用于装备作战仿真,在理论、建模和软件技术等方面都有很多问题亟待解决。
(1)作战Agent微观理论还有待创新和完善。
经典的BDI模型和VSK模型应用于装备作战仿真存在诸多的问题:传统Agent模型没有显式的描述作战Agent的命令特性,因而无法体现作战主体上下级的强制性和等级特性。
BDM模型采用命令所承载的内容“任务”代替传统模型的意图,体现了作战Agent的强制性,但是,使得作战Agent自身的自治性弱化甚至丧失。
半自治作战Agent体现了作战主体强制性和自治性相结合的特点,但现在还没有一套完整严谨的模型体系对其进行描述。
因此,如何结合传统Agent的微观模型,建立一个作战Agent 微观模型体系,既体现作战主体的强制性又体现其自治性,是Agent技术应用于装备作战仿真的理论基础。
分布交互仿真
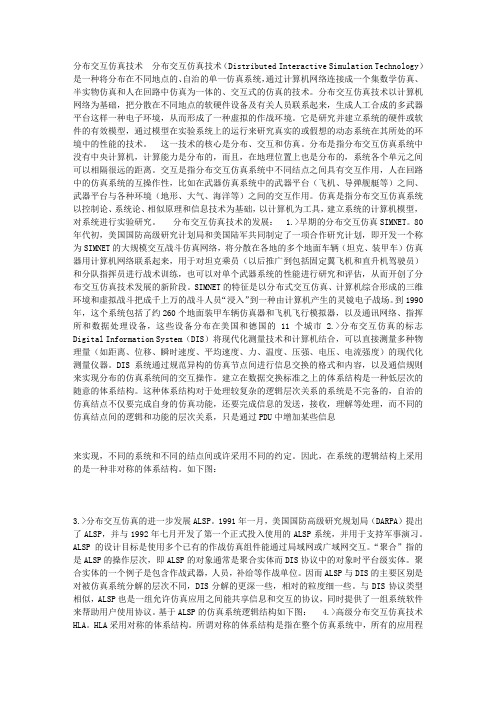
分布交互仿真技术分布交互仿真技术(Distributed Interactive Simulation Technology)是一种将分布在不同地点的、自治的单一仿真系统,通过计算机网络连接成一个集数学仿真、半实物仿真和人在回路中仿真为一体的、交互式的仿真的技术。
分布交互仿真技术以计算机网络为基础,把分散在不同地点的软硬件设备及有关人员联系起来,生成人工合成的多武器平台这样一种电子环境,从而形成了一种虚拟的作战环境。
它是研究并建立系统的硬件或软件的有效模型,通过模型在实验系统上的运行来研究真实的或假想的动态系统在其所处的环境中的性能的技术。
这一技术的核心是分布、交互和仿真。
分布是指分布交互仿真系统中没有中央计算机,计算能力是分布的,而且,在地理位置上也是分布的,系统各个单元之间可以相隔很远的距离。
交互是指分布交互仿真系统中不同结点之间具有交互作用,人在回路中的仿真系统的互操作性,比如在武器仿真系统中的武器平台(飞机、导弹舰艇等)之间、武器平台与各种环境(地形、大气、海洋等)之间的交互作用。
仿真是指分布交互仿真系统以控制论、系统论、相似原理和信息技术为基础,以计算机为工具,建立系统的计算机模型,对系统进行实验研究。
分布交互仿真技术的发展: 1.>早期的分布交互仿真SIMNET。
80年代初,美国国防高级研究计划局和美国陆军共同制定了一项合作研究计划,即开发一个称为SIMNET的大规模交互战斗仿真网络,将分散在各地的多个地面车辆(坦克、装甲车)仿真器用计算机网络联系起来,用于对坦克乘员(以后推广到包括固定翼飞机和直升机驾驶员)和分队指挥员进行战术训练,也可以对单个武器系统的性能进行研究和评估,从而开创了分布交互仿真技术发展的新阶段。
SIMNET的特征是以分布式交互仿真、计算机综合形成的三维环境和虚拟战斗把成千上万的战斗人员“浸入”到一种由计算机产生的灵镜电子战场。
到1990年,这个系统包括了约260个地面装甲车辆仿真器和飞机飞行模拟器,以及通讯网络、指挥所和数据处理设备,这些设备分布在美国和德国的11个城市 2.>分布交互仿真的标志Digital Information System(DIS)将现代化测量技术和计算机结合,可以直接测量多种物理量(如距离、位移、瞬时速度、平均速度、力、温度、压强、电压、电流强度)的现代化测量仪器。
第五章分布交互仿真技术ppt课件

StEntityIdentifier stReceiveingEntityID;
unsigned long uRequestID;
unsigned long uActionID;
unsigned long uNumfixedDatum;//定长数据个数
unsigned long uVarDatum;//变长数据个数
DR算法、数据交换类型
这些标准规定了仿真器互连时网络底层协议应提供的服务、网络系统数
6
表示层
IEEE1278.1
PDU格式及其交互形式
据传输应具备的指标、仿真器间的数据交换内容和格式、数据通信的辅
5
会话层
IEEE1278.1
通信服务类型,TCP连接建立
助算法等;
4
传输层
IEEE1278.2 寻址模式、端端通信、通信可靠性
局部数据通道
接口驱动 数据接口
网络协议
网络接口 网络
NIU数据转换示意图
15
分布交互仿真技术 病原体侵入机体,消弱机体防御机能,破坏机体内环境的相对稳定性,且在一定部位生长繁殖,引起不同程度的病理生理过程
DIS系统体系结构
网络接口单元NIU辅助功能
数据过滤功能:NIU中保留一长本仿真器感兴趣的实体的ID表,NIU根 据该表格进行数据过滤; DR模型解算:NIU采用DR递推算法对网络延时进行补偿; 表示仿真器正常运转的“心跳”数据发送:NIU每隔固定时间段向外发 送一数据帧,表示该仿真器仍处于正常状态;
类型、PDU所属的议族、时间戳及PDU 的长度;
主体 描述PDU所表示相关方面的全部信息;
变长体 PDU的数据域或与实体相关的附属部件;
typedef struct
第五章分布交互仿真技术

具体内容
7
应用层
IEEE1278.1
DR算法、数据交换类型
这些标准规定了仿真器互连时网络底层协议应提供的服务、网络系统数
6
表示层
IEEE1278.1
PDU格式及其交互形式
据传输应具备的指标、仿真器间的数据交换内容和格式、数据通信的辅
5
会话层
IEEE1278.1
通信服务类型,TCP连接建立
助算法等;
14
分布交互仿真技术
DIS系统体系结构
仿真节点1
DIS中的仿真节点
仿真节点n
网络连接器
连接其他仿真节点 (NIU)
仿真计算机
仿真计算机
仿真计算机
15
分布交互仿真技术
DIS系统体系结构
网络接口单元NIU基本功能
物理上:NIU完成各仿真器的不同标准数据接口与网络系统的互连 数据流上:实现了不同数据集到PDU(Ptotocol Data Unit)的互换 仿真环境上:实现了局部仿真到统一的综合虚拟环境的互通
Simulator
NIU
数据
PDU
应用软件 局部数据 接口驱动 数据接口
局部数据通道
接口驱动 数据接口
网络协议
网络接口 网络
NIU数据转换示意图16源自分布交互仿真技术DIS系统体系结构
网络接口单元NIU辅助功能
数据过滤功能:NIU中保留一长本仿真器感兴趣的实体的ID表,NIU根 据该表格进行数据过滤; DR模型解算:NIU采用DR递推算法对网络延时进行补偿; 表示仿真器正常运转的“心跳”数据发送:NIU每隔固定时间段向外发 送一数据帧,表示该仿真器仍处于正常状态;
2
分布交互仿真技术
分布式交互仿真产生的背景
分分布交仿真-PPT精品文档
仿真实体的分类
— 战场实体:描述实际作战对象。人控的、自动的、半自动的 — 环境实体:描述实际战场环境。地形、天气、电磁干扰 — 仿真支持实体:用于仿真试验的。显示、输入、记录、控制
分布交互仿真系统的基本特性
— 分布性、异构性、重用性、重构性、复杂性
分布交互仿真系统的面向对象特性
仿真实体 组元 交互 分布交互 仿真系统 异构 重构 重用 复杂 对象 类 消息 封装 派生 继承 分布对象 面向对象 技术
HLA的特点
— 客户机服务器模式:可伸缩性、互操作性 — 通过RTI进行信息交换:时空一致性、互操作性 — 采用对象模板技术:异构性、可重用性
仿真应用 仿真应用 仿真应用
运 行 时 间 支 持 系 统 ( RTI)
仿真应用
仿真应用
仿真应用
图 2.11
F ig 2 .1 1
HLA对 称 的 逻 辑 拓 扑 结 构
分布交互仿真系统体系结构的特性
DIS的特点
— — — — 无中央处理机 结点自治 IEEE1278 DR算法
仿真应用
仿真应用
仿真应用
DIS的缺点
— 不支持异种仿真应用之间的 互操作 — 仿真应用间缺乏可重用性 — 巨大的带宽和计算量的要求 — DIS协议定义的PDU数量有限 — 缺少处理静态实体的有效方 法 — 每个仿真节点必须备份整个 仿真环境的模型和数据
仿真应用 仿真应用
仿真应用
图 2 .1 0 D IS 非 对 称 的 逻 辑 拓 扑 结 构 F ig 2 .1 0 N o n s y m m e tric a l L o g ic a l T o p o lo g y S tru c tu re o f D IS
动态建模-交互模型PPT演示课件

U
19
4.4 合作图
合作图(collaboration diagram), 描述系统各成分 (即对象)如何协同工作,来实现系统的某个功 能。
合作图描述对象及其之间的链接(关联的实例), 以及链接的对象如何发送消息。
链接(或称链):是关联的实例,当一个类与另 一个类之间有关联时,这两个类的实例之间就有 链,一个对象就能向另一个对象发送消息。
异步消息的接收者执行所请求 的操作,操作完成后可以向异
步消息的发送者返回信息,也 可以不返回;
异步消息的发送者和接收者采 用并发工作方式。
异步消息图示
U
16
顺序图实例:
汽车租赁系统中”客户还车”的顺序图
U
17
包 含 反 身 消 息 的 顺 序 图
U
18
顺序图实例:
带有时间延迟标记的顺序图
权巍
U
1
主要内容
4.1 对象类动态模型 4.2 交互建模 4.3 顺序图 4.4 合作图
U
2
4.1 对象类动态模型
对象类动态模型实际上是解决系统中的对象“何时做” 的问题,是系统分析、设计阶段的重要内容和产物。
该模型描述系统的动态行为,包括:系统如何响应外 部事件或激励,系统中各对象的执行顺序和状态的变 化,侧重描述系统控制逻辑。
操作后返回的系列值。可缺省。 5.操作名:必须是接收该消息的对象类角色中的操作名。 6.“()”内的参数表是以“,”号区分的实参表,传送给
接收消息的对象中的某个操作。
U
10
合法的消息标识,例: 启动系统(密码) 1: [打印机空闲] 打印(文件a) 2.3 *[所有课程] 课程: = 查询(课程名) 1.2 *[所有货物清单] 核对清单() 1.3.1 p:= find(specs) 4 [x<0] invert(x, color)
软件工程-计算机仿真-课件-分布交互仿真HLA
1.2 分布交互仿真发展历程(4)
第三阶段:在DIS发展的同时,DARPA发起了 一个聚合级分布式作战仿真的实验,提出了聚 合级仿真协议ALSP (Aggregate Level Simulation Protocol)。
– ALSP的目标是使现有的多个聚合级作战仿真应用 可以通过局域网或广域网相互交互。在概念上,每 个仿真控制其自身对象,并且共享有关其自身与其 他仿真的信息。
– 2000年9月,由IEEE计算机界的仿真互操作标准委 员会(SISC)发起的基于DMSO HLA定义1.3版本 进行讨论修改的IEEE M&S HLA 标准系列IEEE P1516、1516.1、1516.2/D5经IEEE标准协会(SA) 投票批准,已成为正式的IEEE标准。
– 美国国防部规定,2001年后所有国防部门的仿真必 须与HLA相兼容。
分布交互仿真
2.1 HLA的组成
规则(Rules):为了保证仿真系统(联邦)运 行过程中,各联邦成员之间能够正确交互。 接口规范(Interface Specification) :定义了在 联邦运行过程中,支持联邦成员之间互操作 的标准服务。 对象模型模板OMT(Object Model Template): 目的是使联邦成员之间用公共的、标准化的 格式进行数据交换。它包括联邦对象模型 (FOM)、仿真对象模型(SOM)和管理对 象模型(MOM)。
时空一致性
– 必须保证仿真系统中的时间和空间,与现实 生活中的时间和空间保持一致。
开放性
– 各仿真实体可以方便地加入或者离开仿真系 统,这种动态变化不影响系统的运行。
分布交互仿真
1.2 分布交互仿真发展历程(1)
1978年,美国一空军空军上尉J.A.Thorpe发表 了一篇文章《Future Views: Aircrew Training1980-2000》,提出了联网仿真的思想。 – 它在文章中首次系统地阐述了联网仿真技术
机械电子工程分布交互仿真及其应用
、摘要r3981《1分布交互仿真(DistributedinteractiveSimulation,DIS)是一种新兴的仿真技术,它基于计算机技术、实时图形图像处理技术、仿真技术、系统工程技术的发展和应用,通过计算机联网技术将分散在不同地理位置的仿真器、计算机生成兵力以及其它设备连成一体,形成一个在时间及空间上相互耦合的虚拟战场环境,参与者可自由地交互作用,完成各种战役战术训练,完成对武器系统性能、方案的验证及评估等任务。
DIs系统具有分布性、仿真性、实时性、异构性、交互性和重构性等特点。
分布交互仿真作为当今仿真领域的前沿和热点之一,倍受仿真界人士的广泛关注,尤其受到了军方的青睐,在武器装备研究上和军事训练上具有重大意义。
·本文将在分析分布交互仿真技术的基本特点、DIS系统的设计原则和关键技术的基础上,重点论述分布交互信息协议制定、分布式数据库平台的建立等t通过对这些技术的分析与研究,结合实际,介绍作者参与的海军某作战指挥模拟训练系统的总体设计。
关键词t分布交互仿真,元字典,面向对象,通信协议AbstractDistributedInteractiveSimulation(DIS)iStoday’Smainwendofnetworkingcomputingandobject-orientedtechnology.Itisbasedonthecomputingtechnology,thereal-timegraphicstechnology,simulatingtechnologyandtheengineeringtechnology.ItiSoftenusedtoestablishavisualenvironmentfortraining,equipmentenvironment.wecaninteractwithtestingandprojectevaluating.InthevisualComputerGeneratedForces(CGF),simulatingequipmentsandrealequipments.ThUSinthevisualbattlefieldmancanfighta11kindsofenemytoimprovehisability.TheeffectandthebenefitofDISarediscussedinthePaDer.Themethodologyofobiect-ofientedtechnologyandtheroleoftmifiedopenarchitecturefrarneworkinDISareanalyzed.ArmyinmilitarytrainingandweaDonresearchoftenusesDIS.AtypicalDISApplicationbeingdevelopediSintroducedandthecurientissuesandthefuturewendsofDISarealsodiscussed.KEYWORDS:DIS,Simulation,PDU,Meta-DatabaseDictionary(MDD),00南京理工大学硕士论文:分布交互仿真及其应用1绪论1.1课题背景及意义为了打赢现代高科技战争必须提高我军的训练水平,而现代军事训练的高度复杂性及其带来人力和物力的大量消耗,便促进了军事仿真技术的迅速发展。
11第十一章 分布建模与仿真
第十一章分布建模与仿真§11.1分布式系统11.1.1 分布式系统的基本概念1、分布式系统的定义分布式系统通过远程处理把地理、功能或任务等分布的属性组织在一起。
分布式系统被定义为处理工作分布在地理位置不同的、独立的计算机所组成的系统。
可以定义为:它可把不同的合作实体管理成一个单一的实体,是通过网络和用户界面利用服务器将服务传送到最终用户的应用。
2、分布式系统的特点1)分布性2) 蠕动性就分布系统本身而言,有其不确定性,即系统并非固定不变。
在此,系统存在某种程度的流动性、模糊性、异步性,各要素之间通过相互作用、相互通信达到协调工作。
3)自组织分布系统能适应环境的变化进行自组织,按一种规律或秩序来达到某一目的。
4) 集中与分布共享对于一般的分布系统而言,它往往表现在"集中"与"完全"分布系统之间,即在分布系统中某些要素接受不同的、独立的信息,进行不同的动作,而另外一些要素可能在一个或多个不同的统一的命令体系控制下进行动作。
11.1.2 分布式应用系统1、分布式应用系统的技术层次图11.1 分布式计算层次2、分布式系统的实现一个运行良好的分布式系统需要人机交互、软件工程、网络、算法设计等方面的工作,同时还要对支持的任务和组织有很好的理解。
命名系统是分布式应用系统的一个重要基础负载平衡是获得高效率执行的关键。
负载平衡中第一个要解决的问题是转移处理的经常性成本是否低于将工作量分布化所获得的利益。
§11.2 分布式仿真技术11.2.1 仿真系统分解对一个仿真系统进行有效的分解是分布式离散时间仿真系统实现的关键,仿真系统的分解有五种基本的方法,对于系统的并发性、并行性以及同步性,每一种方法有它自己的优点和缺点。
1、并行编译这种方法是利用并行编译器在连续仿真中找出代码的执行次序,这连续仿真可在多处理器中进行处理。
2、分布试验在初级的连续仿真中,只是将强大的多处理器作简单的应用,仅将仿真独立地复制到N个处理器中,将得到的结果取平均值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DIS逻辑拓扑结构
仿真应用
仿真应用
仿真应用
仿真应用
仿真应用
仿真应用
DIS体系结构的特点
• 自治的仿真应用负责维护一个或多个仿真
实体的状态
• 用标准PDU传送数据 • 仿真应用负责发送仿真实体的状态和交互
信息
• 由接收仿真应用来感知事件或其它实体的
存在
• 用DR算法来减少网络中的通信负荷
HLA中的基本概念
规定联邦的数据交换, 在SOM和FOM中定义数
在接口控制文件中说明,
据通信格式
但没有标准格式
网络接口按IEEE1278-2
由AIS(ALSP
由RTI(Run-Time
标准
Infrastructure Software) Infrastructure)提供网
提供网络接口
络接口
实时仿真
守恒的时间管理模式 多种时间的管理模式
DMSO定义的HLA文档
HLA的定义文档
规则
联
联
邦
邦
规
成
则
员
则
对象模型模板
接口规范
联
仿பைடு நூலகம்
邦
真
模
模
型
型
模
模
板
板
联
声
所
对
时
数
邦
明
有
象
间
据
管
管
权
管
管
分
理
理
管
理
理
布
理
管
理
HLA文档在体系结构中发挥作用 的位置
联邦成员 (1)(3)
(2)
联邦 (1)(3)
联邦成员 (1)(3)
(2)
RTI
(1)-规则 (2)-接口规范 (3)-对象模型模板
HLA OMT
• HLA中OM的完整描述包括两个部分:O
MT和OMT扩展。OMT记录联邦或成 员的一些关键信息,如对象、交互、属性等。 OMT扩展提供描述对象间关系的补充机 制,记录某些有用的、能帮助理解仿真应用 但又不能记录在OMT中的信息,联邦运行 时,RTI需要OMT中的信息,但一般不需 要OMT扩展中的信息。
IEEE 1278.1- DIS应用协议、 IEEE 1278.2 DIS通信服务与剖面、 IEEE 1278.3- DIS演练 管理与反馈、 IEEE 1278.4 -DIS 校核 验证和 确认时间指南、 IEEE 1278.5 -DIS逼真度描述 需求.
DIS及其标准与ISO/OSI参考 模型的关系
抗交互
• 仿真性(Simulation) • 实时性(Real Time) • 集成性(Integration) • 没有中央计算机控制整个仿真演练 • 使用DR算法来减少通信负荷
分布交互仿真的关键技术
• 体系结构 • 信息交换标准 • DR机制 • 时钟同步技术 • 接口处理机制 • 计算机生成兵力(Computer Generate Forces) • VVA(Verification,Validation and Accreditation) • 仿真管理技术
分布交互仿真
• DIS就是在SIMNET(Simulation Network)的基础上
产生的。DIS是一种基于计算机及高速通信网络的 仿真训练系统,它将分散于不同地点、不同类型 的仿真设备或系统集成为一个整体,使之相对于 每个用户皆表现为一个逼真的浸入环境,并在此 环境下支持高度的交互式操作。
• 所谓“高度的交互式操作”,是指DIS的虚拟环境
• ③交互类表:用来记录联邦或成员中的交互类及其
父类-子类关系。在HLA中,交互的定义是一个 成员中的某个或某些对象产生的能够对其它成员 中对象产生影响的明确的动作;
HLA OMT
• ④属性表:用来说明联邦或成员中对象属性的特
性。对象类结构表中的每一个对象类都有一个 固定的属性集,属性表用来描述这个属性集;
• 仿真实体、仿真结点、仿真应用、仿
真管理计算机、仿真演练和仿真主机。
DIS中的几个基本概念及其相互 关系
仿真应用1
仿
真
仿真实体1
仿真实体n1
管 理
软
件
仿真主机1(仿真管理计算机)
DIS网络
仿真结点
仿真结点
网络交换设备1
仿真应用1
仿
真
仿真实体1
仿真实体nm
管 理
软
件
仿真主机n
仿真结点
仿真结点 网络交换设备k
应用层 表示层 会话层 传输层 网络层 数据链路层 物理层 OSI模型
应用层
IEEE 1278.1-1995
通信层
IEEE 1278.2-1995
DIS层次
DIS标准
HLA标准
• HLA是一个灵活的、可重用的软件体系结构,是
创建基于组建的分布式仿真的框架性技术结构。 它经历了四个发展阶段: (1)初始定义阶段。1995年3月提出了HLA的概念; (2)基准发展阶段。发布原型、基准定义,定义 了HLA 的基本框架和原型; (3)技术转换阶段。1997年-1998年先后推出HLA 的三个规范版本1.1、1.2和1.3; (4)规范执行实现阶段。1999年3月提交的 IEEE1516Z 12月份投票通过。
• RTI先判断服务请求所要求的通信机制,最
后按照所要求的通信机制与相应的仿真应 用通信
HLA的体系结构特点
• 仿真应用之间不直接通信,所有网络通信
功能集中由RTI实现
• 仿真应用向RTI发出某种接口服务的功能调
用,RTI根据各个仿真应用的需求,调度系 统中的数据分布
• RTI先判断服务请求所要求的通信机制,最
对交互操作的支持水平与训练时的设定严格一致。
分布交互仿真的发展
自从1983年,美国国防部高级研究计划局(DARPA) 和美国陆军共同制定的SIMNET研究计划启动以来, DIS技术走过了四个主要阶段:
•
SIMNET的研制阶段和使用阶段
•
DIS阶段
•
ALSP(Aggregate Level Simulation Protocol)阶段
军事仿真技术面临的挑战
• 仿真对象的复杂性--作战系统是一种复杂的
动态随机系统,规模大、结构复杂、分散化、 不确知性等等
• 军事需求问题--未来的作战仿真必将广泛的
采用分布式仿真技术,它要求能够集成多个部 门开发的不同类型的仿真应用,能够实现“真 实仿真”、“虚拟仿真”、“构造仿真”的无 缝联结。
• ⑤参数表:用来说明联邦或成员中交互参数的特
性;
• ⑥枚举结构数据类型表:用来对出现在属性表/
参数表中的枚举数据类型进行说明;
• ⑦复杂数据类型表:用来对出现在属性表/参数
表中的复杂数据类型进行说明;
• 技术需求问题--体系结构的开放性、系统的
可扩展性、子系统的互操作性、仿真组件的重 用性、模型表达的复杂性、时空和逻辑的一致 性、浸入式人机交互式仿真机制、融合多种模 式的时间管理机制、辅助建模工具的不充分性 和理论与方法研究相对于工程实践的滞后性
分布交互仿真的体系结构及通 信机制
DIS的几个基本概念
HLA规则
HLA规则规定了所有联邦及其成员必须符合的要求, 表述了HLA中各个部件的功能划分和逻辑关系。 体现了HLA的基本构思和原则。该规则共有10条, 前5个同联邦相关,后5个同联邦成员相关:
• 规则1:联邦必须具有一个OMT格式的联邦对象模
型(FOM)。
• 规则2:在每一个联邦中,所有与仿真有关的对象实
• 规则10:联邦成员必须能够按一定方式管理
本地时钟,在该方式中,允许他们与其它成员 协调数据交换。
HLA OMT
• 对象模型(OM)可用各种形式描述,在HLA中规
定了一种统一的表格—OMT来规范OM的描述。 OMT是一种标准化的描述框架,其主要作用是:提 供一个可公共理解的机制来描述成员间数据的交 换及运行期间的协作的机制(FOM);提供通用的、 易交流的、易理解的机制来描述一个潜在的成员 所具备的与外界进行数据交换及协作的能力(SO M);促进用于建立HLA对象模型的公共工具的 设计与应用。OMT作为对象模型的模板规定了 记录这些对象模型内容的标准格式和语法。OM T是HLA实现互操作和重用的重要机制之一。
• DIS标准在计算机设备、计算机与外设的互联
以及局域网方面沿用了许多计算机和网络的标 准,以保证设备的高可用性,充分利用民用和 公共资源。
• DIS标准是由关于分布式仿真互操作标准研讨
会建立的。随着通信技术和计算机技术的进步, DIS标准不断完善,形成了DIS的标准体系 (IEEE Std1278),包括:
后按照所要求的通信机制与相应的仿真应 用通信
RTI完全分布在各主机中
仿真主机
仿真应用
程序接口 驻留RTI程序
仿真应用
程序接口 驻留RTI程序
仿真主机
RTI
驻留RTI程序
程序接口
仿真主机
仿真主机
中央RTI程序与各主机中的驻留 RTI程序互联
仿真主机
仿真应用
程序接口 驻留RTI程序
仿真应用
程序接口 驻留RTI程序
分布交互仿真
分布交互仿真概述
系统仿真技术的产生
• 20世纪80年代以来,随着世界范围内冷战
的结束,各国政府纷纷把投资重点转向经 济建设,大量消减军费开支;军事演习不 仅受政治环境的影响,同时还受到经济条 件的制约。因此,以某种有效的经济的方 式进行军事演习、训练与武器系统研制就 成为各国军方摆脱困境的途径。发展系统 仿真技术就是一种很好的方法。
• 规则6:联邦成员必须有一个OMT格式的仿真对象