神经网络与遗传算法
基于遗传算法的神经网络拓扑结构优化

基于遗传算法的神经网络拓扑结构优化随着机器学习和人工智能的迅猛发展,神经网络成为解决复杂问题的重要模型之一。
然而,神经网络的拓扑结构对其性能有着重要影响。
为了提高神经网络的准确性和效率,研究学者们提出了基于遗传算法的神经网络拓扑结构优化方法。
首先,我们来了解一下遗传算法的基本概念和原理。
遗传算法是一种模拟自然界生物进化过程的优化方法。
它通过模拟进化的过程,不断筛选和改进候选解,以求得一个较优解。
遗传算法主要包括选择、交叉、变异等操作,其中选择是根据适应度函数对个体进行筛选;交叉是将两个个体的染色体交换一部分基因;变异则是在个体的染色体中随机改变某些基因。
在神经网络拓扑结构优化中,遗传算法被用于搜索最优的网络结构。
神经网络的拓扑结构通常由神经元的连接方式和层次结构组成。
通过调整神经网络的拓扑结构,我们可以改变神经元之间的连接方式,从而改变网络的学习能力和性能。
具体而言,基于遗传算法的神经网络拓扑结构优化方法可分为以下几步。
首先,我们需要定义一组合适的基因编码方式,用于表示神经网络的拓扑结构。
通常,一种常用的基因编码方式是使用二进制串表示神经网络的连接方式和层次结构。
每个基因位表示一个连接是否存在或神经元是否属于某个特定层次。
接着,我们需要定义适应度函数,用于评估每个网络结构的性能。
适应度函数可以选择网络的准确率、收敛速度、鲁棒性等指标。
然后,我们通过选择、交叉和变异操作来生成新的网络结构。
选择操作根据适应度函数对网络进行筛选,使得性能较好的网络具有较高的生存概率;交叉操作将两个网络的基因串进行交叉,生成新的网络结构;变异操作则在网络的基因串中随机改变部分基因,以增加网络的多样性。
最后,通过不断的迭代优化过程,我们可以在众多网络结构中找到具有较高适应度的网络结构。
使用基于遗传算法的神经网络拓扑结构优化方法可以带来许多好处。
首先,它能够大大提高神经网络的准确性和效率。
通过优化网络结构,我们可以消除冗余的连接和神经元,提高网络的学习能力和泛化性能。
遗传算法与神经网络的结合方法与实例分析

遗传算法与神经网络的结合方法与实例分析遗传算法和神经网络是两种不同的计算模型,它们在解决问题时具有各自的优势和局限性。
然而,通过将这两种方法结合起来,可以充分发挥它们的优点,提高问题解决的效率和准确性。
本文将探讨遗传算法与神经网络的结合方法,并通过实例分析展示其应用价值。
一、遗传算法和神经网络的简介1. 遗传算法遗传算法是一种模拟自然界进化过程的优化算法,通过模拟遗传、变异和选择等过程,逐步优化问题的解。
它适用于复杂的优化问题,具有全局搜索能力和并行处理能力。
2. 神经网络神经网络是一种模拟人脑神经系统的计算模型,通过神经元之间的连接和权重调整,实现对输入数据的模式识别和预测。
它适用于处理非线性问题,具有自适应性和学习能力。
二、遗传算法与神经网络的结合方法1. 遗传算法初始化神经网络权重在神经网络训练之前,通常需要对权重进行初始化。
传统的方法是随机初始化权重,但这种方法可能导致网络陷入局部最优解。
通过遗传算法初始化神经网络的权重,可以提高网络的初始状态,增加全局搜索的能力。
2. 遗传算法优化神经网络结构神经网络的结构包括神经元的数量、层数和连接方式等。
通过遗传算法的优化过程,可以调整神经网络的结构,使其更好地适应问题的特征。
例如,可以通过遗传算法选择合适的神经元数量和层数,以及确定神经元之间的连接方式,从而提高网络的性能。
3. 遗传算法选择神经网络的最优解在神经网络训练过程中,通常需要选择一个最优解作为最终结果。
遗传算法可以通过选择适应度函数来评估神经网络的性能,并选择表现最好的网络作为最优解。
这种方法可以避免由于局部最优解而导致的问题性能下降。
三、遗传算法与神经网络的实例分析以手写数字识别为例,展示遗传算法与神经网络的结合应用。
手写数字识别是一个典型的模式识别问题,神经网络可以通过学习大量的手写数字样本,实现对新样本的准确识别。
但是,神经网络的训练过程需要大量的计算资源和时间,而且容易陷入局部最优解。
神经网络与遗传算法相结合的优化方法

神经网络与遗传算法相结合的优化方法随着科技的不断发展,人工智能技术也越来越成熟,其中神经网络和遗传算法是两种比较常见的优化方法。
神经网络是一种基于人脑神经系统的计算模型,它可以通过输入和输出数据来学习并预测未知的数据。
而遗传算法则是一种基于生物进化的计算优化方法,通过模拟进化过程来寻找最优解。
在实际应用中,单独使用神经网络或遗传算法可能会存在一些问题。
例如,神经网络可能会受到噪声数据的影响,导致训练过程不够稳定;而遗传算法可能会受到局部最优解的限制,从而难以找到全局最优解。
因此,将神经网络和遗传算法相结合,可以弥补彼此的不足,提高优化效果。
神经网络和遗传算法相结合的优化方法大致可以分为两种:基于神经网络的遗传算法和基于遗传算法的神经网络优化。
基于神经网络的遗传算法是指将神经网络作为遗传算法中的染色体,通过遗传算法对神经网络的权重和偏置进行优化。
首先,将神经网络的权重和偏置随机生成,并用其计算出目标函数值作为该染色体的适应度。
然后,使用遗传算法的选择、交叉和变异操作对染色体进行进化,直到满足终止条件为止。
最后,选择适应度最高的神经网络作为最优解。
基于遗传算法的神经网络优化是指使用遗传算法来优化神经网络的拓扑结构和参数。
首先,通过遗传算法生成多个随机的神经网络拓扑结构,并计算它们的目标函数值。
然后,使用遗传算法的选择、交叉和变异操作对拓扑结构进行进化,得到新的神经网络结构。
接着,针对每个神经网络进行参数优化,即对权重和偏置进行遗传算法优化。
最后,选择适应度最高的神经网络作为最优解。
这两种方法都是神经网络和遗传算法相结合的优化方法,但具体应用时需要根据实际情况进行选择。
例如,在数据量较小的情况下,基于神经网络的遗传算法可能更加有效,因为神经网络可以更好地拟合数据;而在数据量较大且结构复杂的情况下,基于遗传算法的神经网络优化可能更加适合,因为遗传算法可以更好地处理大规模的优化问题。
综上所述,神经网络和遗传算法相结合的优化方法具有优化效果好、稳定性高等优点,在实际应用中有着广泛的应用前景。
遗传算法与神经网络

2.1 神经网络简介
人工神经网络(artificial neural network,缩写 ANN),简称神经网络(neural network, 缩写 NN),是一种模仿生物神经网络的结构和功能的数学模型或计算模型。神经网络由大量 的人工神经元联结进行计算。大多数情况下人工神经网络能在外界信息的基础上改变内部结 构,是一种自适应系统。现代神经网络是一种非线性统计性数据建模工具,常用来对输入和 输出间复杂的关系进行建模,或用来探索数据的模式。
进化次数限制; (1)计算耗费的资源限制(例如计算时间、计算占用的内存等); (2)一个个体已经满足最优值的条件,即最优值已经找到; (3)适应度已经达到饱和,继续进化不会产生适应度更好的个体; (4)人为干预; (5)以及以上两种或更多种的组合。
3/9
遗传算法与神经网络
一个典型的遗传算法要求: 一个基因表示的求解域, 一个适应度函数来评价解决方案。
经过这一系列的过程(选择、交配和突变),产生的新一代个体不同于初始的一代,并 一代一代向增加整体适应度的方向发展,因为最好的个体总是更多的被选择去产生下一代, 而适应度低的个体逐渐被淘汰掉。这样的过程不断的重复:每个个体被评价,计算出适应度, 两个个体交配,然后突变,产生第三代。周而复始,直到终止条件满足为止。一般终止条件 有以下几种:
基于遗传算法的人工神经网络模型构建与优化研究
基于遗传算法的人工神经网络模型构建与优化研究人工神经网络(Artificial Neural Network,ANN)是一种模仿生物神经网络结构和功能的计算模型,通过模拟神经元之间的连接和信号传递,能够实现机器学习和模式识别任务。
而遗传算法(Genetic Algorithm,GA)是一种基于自然选择和遗传机制的优化算法,通过模拟生物进化过程来寻找最优解。
本文将探讨基于遗传算法的人工神经网络模型的构建与优化研究。
首先,构建人工神经网络模型是研究的首要任务。
人工神经网络由多个神经元和这些神经元之间的连接组成。
每个神经元接收来自其他神经元的输入,并通过激活函数对输入信号进行加权计算,最终输出结果。
遗传算法可以应用于优化神经元的连接权重和调整激活函数的参数,以获得更好的网络性能。
在构建人工神经网络模型时,首先需要确定网络的拓扑结构,包括输入层、隐藏层和输出层的神经元数量,以及它们之间的连接方式。
遗传算法可以通过进化过程搜索最佳的拓扑结构,以提高神经网络的性能。
遗传算法通过定义适应度函数来衡量每个个体的适应度,适应度高的个体将更有可能被选中下一代进化。
通过遗传算法的迭代过程,我们可以找到最佳的拓扑结构。
其次,优化神经元的连接权重是构建人工神经网络模型的关键一步。
连接权重决定了不同神经元之间的信号传递强度。
遗传算法可以通过进化过程调整连接权重,以找到最佳的权重组合。
在遗传算法的优化过程中,通过交叉和变异等操作,通过上一代个体中的优秀基因来生成新的个体,逐步优化连接权重,使神经网络的性能得到提高。
此外,还可以使用遗传算法来优化激活函数的参数。
激活函数决定了神经元输出的非线性特性,常用的激活函数包括Sigmoid、ReLU、Tanh等。
通过调整激活函数的参数,我们可以改变神经元的响应特性,从而使网络更好地拟合训练数据。
遗传算法可以在多个激活函数和参数组合中搜索最佳的选择,以提高神经网络的性能。
此外,在进行人工神经网络的训练和优化时,还可以使用遗传算法来选择最优的训练样本和参数初始化方法。
神经网络与遗传算法

10.4 遗传算法
1975年美国Michigan大学J.Holland教授提出。 美国人De.Jong博士将遗传算法应用于函数优化 Goldberg成了遗传算法的框架。
10.4.1遗传算法基本原理
选择适应值高的染色体进行复制,通过 遗传算子:选择、交叉(重组)、变异,来 产生一群新的更适应环境的染色体,形成新 的种群。
遗传算法利用适应值信息,而不需要导数或其它辅助信 息。
遗传算法用适应值评估个体,用遗传算子产生更优后代 ,不需要像神经网络中用梯度公式引导。
隐含并行性:
遗传算法是对N个位串个体进行运算,它隐含 了大量的模式(用通配符#包含的个体)
遗传机器学习
10.5基于遗传算法的分类学习系统
我们研制的遗传分类学习系统GCLS是一种字符串规则 (分类器)的学习系统。
1
总和∑ 平均值 最大值
1754
1.00 4.00
4.0
439
0.25 1.00 1.0
729
0.42 1.66 2.0
选择后的交配 池(下划线部 分交叉)
11001 11011 11011 10000
交叉对象
(随机选 择)
交叉位置
(随机选择 )
新的种群
2
1
11011
1
1
11001
4
3
11000
3
遗传算法是进行群体的搜索。 它对多个个体进行群体搜索,构成一个不断进
化的群体序列,它能找到全局最优解(优于爬 山法)
遗传算法是一种随机搜索方法,三个算子都是 随机操作,利用概率转移规则。
遗传算法的处理对象是问题参变量进行编码的个体,而 不是参变量自身。
参变量编码成位串个体,通过遗传算子进行操作。不是 对参数变量进行直接操作。
毕业设计论文基于遗传算法的BP神经网络的优化问题研究.doc
编号:审定成绩:重庆邮电大学毕业设计(论文)设计(论文)题目:基于遗传算法的BP神经网络的优化问题研究学院名称:学生姓名:专业:班级:学号:指导教师:答辩组负责人:填表时间:2010年06月重庆邮电大学教务处制摘要本文的主要研究工作如下:1、介绍了遗传算法的起源、发展和应用,阐述了遗传算法的基本操作,基本原理和遗传算法的特点。
2、介绍了人工神经网络的发展,基本原理,BP神经网络的结构以及BP算法。
3、利用遗传算法全局搜索能力强的特点与人工神经网络模型学习能力强的特点,把遗传算法用于神经网络初始权重的优化,设计出混合GA-BP算法,可以在一定程度上克服神经网络模型训练中普遍存在的局部极小点问题。
4、对某型导弹测试设备故障诊断建立神经网络,用GA直接训练BP神经网络权值,然后与纯BP算法相比较。
再用改进的GA-BP算法进行神经网络训练和检验,运用Matlab软件进行仿真,结果表明,用改进的GA-BP算法优化神经网络无论从收敛速度、误差及精度都明显高于未进行优化的BP神经网络,将两者结合从而得到比现有学习算法更好的学习效果。
【关键词】神经网络BP算法遗传算法ABSTRACTThe main research work is as follows:1. Describing the origin of the genetic algorithm, development and application, explain the basic operations of genetic algorithm, the basic principles and characteristics of genetic algorithms.2. Describing the development of artificial neural network, the basic principle, BP neural network structure and BP.3. Using the genetic algorithm global search capability of the characteristics and learning ability of artificial neural network model with strong features, the genetic algorithm for neural network initial weights of the optimization, design hybrid GA-BP algorithm, to a certain extent, overcome nerves ubiquitous network model training local minimum problem.4. A missile test on the fault diagnosis of neural network, trained with the GA directly to BP neural network weights, and then compared with the pure BP algorithm. Then the improved GA-BP algorithm neural network training and testing, use of Matlab software simulation results show that the improved GA-BP algorithm to optimize neural network in terms of convergence rate, error and accuracy were significantly higher than optimized BP neural network, a combination of both to be better than existing learning algorithm learning.Key words:neural network back-propagation algorithms genetic algorithms目录第一章绪论 (1)1.1 遗传算法的起源 (1)1.2 遗传算法的发展和应用 (1)1.2.1 遗传算法的发展过程 (1)1.2.2 遗传算法的应用领域 (2)1.3 基于遗传算法的BP神经网络 (3)1.4 本章小结 (4)第二章遗传算法 (5)2.1 遗传算法基本操作 (5)2.1.1 选择(Selection) (5)2.1.2 交叉(Crossover) (6)2.1.3 变异(Mutation) (7)2.2 遗传算法基本思想 (8)2.3 遗传算法的特点 (9)2.3.1 常规的寻优算法 (9)2.3.2 遗传算法与常规寻优算法的比较 (10)2.4 本章小结 (11)第三章神经网络 (12)3.1 人工神经网络发展 (12)3.2 神经网络基本原理 (12)3.2.1 神经元模型 (12)3.2.2 神经网络结构及工作方式 (14)3.2.3 神经网络原理概要 (15)3.3 BP神经网络 (15)3.4 本章小结 (21)第四章遗传算法优化BP神经网络 (22)4.1 遗传算法优化神经网络概述 (22)4.1.1 用遗传算法优化神经网络结构 (22)4.1.2 用遗传算法优化神经网络连接权值 (22)4.2 GA-BP优化方案及算法实现 (23)4.3 GA-BP仿真实现 (24)4.3.1 用GA直接训练BP网络的权值算法 (25)4.3.2 纯BP算法 (26)4.3.3 GA训练BP网络的权值与纯BP算法的比较 (28)4.3.4 混合GA-BP算法 (28)4.4 本章小结 (31)结论 (32)致谢 (33)参考文献 (34)附录 (35)1 英文原文 (35)2 英文翻译 (42)3 源程序 (47)第一章绪论1.1 遗传算法的起源从生物学上看,生物个体是由细胞组成的,而细胞则主要由细胞膜、细胞质、和细胞核构成。
人工神经网络与遗传算法结合的研究
参 考 文 献
[ ] 3
An es d r Ohls s on. ha Ne W tS w i Dephi . n l 7 Bora d Sofwa e Co po a i ln t r r r ton,USA ,20 2 0
[ 1]
D lh 7 tdo ep i S i u Hep B r n S f r l. ol d ot e a wa
维普资讯 http://wΒιβλιοθήκη
《 现代 电子 技 术 》 0 2年 第1 期 总第 1 3期 20 2 4
收 稿 日期 :2 0 — 9— 2 0 2 0 1
人工 神经网络 与遗传算 法结合的研 究
St d n Co b n n r i i i lN e r lN e w o ks a e tc Al o ih s u y o m i i g A tfc a u a t r nd G ne i g r t m
合 的可能性 。以网络为例 ,结合 自适应遗传算法 F GA]构造 了基 于遗 传算法的 B A P网络 用于解决 T P问题 ,并取得 了 S
很 好的效果 。
关 键 词 :人 工神 经 网络 ;遗 传 算 法 ( A) 自适 应 遗 传 算 法 ( A) G ; AG
人 工 神经 网络 的兴起 源 自于人 类 对 自身 的模 仿 。1 4 9 3年 首先 提 出神 经元 的数 学模 型 ,随 后提 出学 习算 法 兴
杨 朋林
( 四川 大 学 成都
贺
新
YANG e g i HE Xi P nl n, n
60 6) 1 0 4
( i u n Un v r i Sc a ie st h y・ Ch n d . 6 0 6 . C ia egu 10 4 hn )
基于遗传算法与神经网络混合算法的数据挖掘技术综述

基于遗传算法与神经网络混合算法的数据挖掘技术综述摘要:数据挖掘是对大型数据库的数据进行统计分析、提取信息的方法,其基础是人工智能技术。
遗传算法和神经网络是人工智能技术中最重要的技术。
通过对遗传算法和神经网络的特征分析,阐述了遗传算法与神经网络混合算法在数据挖掘中的应用,指出了数据挖掘技术未来发展的方向。
关键词:数据挖掘;数据库;遗传算法;神经网络1遗传算法基本特征遗传算法是模拟达尔文的遗传选择和自然淘汰的生物进化过程的计算模型,是一种具有广泛适用性的通用优化搜索方法。
遗传算法主要借用了生物遗传学的观点,通过自然选择、遗传和变异等作用机制来产生下一代种群,如此逐代进化,直至得到满足要求的后代即问题的解,是一种公认的全局搜索能力较强的算法。
遗传算法有良好智能性,易于并行,减少了陷于局部最优解的风险。
遗传算法的处理对象不是参数本身,而是对参数集进行了编码的个体,可以直接对集合、队列、矩阵、图表等结构进行操作。
同时,在标准的遗传算法中,基本上不用搜索空间的知识或其它辅助信息,而仅用适应度函数值来评估个体,并在此基础上进行遗传操作;遗传算法不是采用确定性规则,而是采用概率的变迁规则来指导它的搜寻方向。
正是这些特征和优点,使得遗传算法在数据挖掘技术中占有很重要的地位,既可以用来挖掘分类模式、聚类模式、依赖模式、层次模式,也可用于评估其它算法的适合度。
2神经网络基本特征神经网络是人脑或自然神经网络若干基本特征的抽象和模拟,是以大量的、同时也是很简单的处理单元(神经元)广泛地互相连接形成的复杂非线性系统。
人工神经网络本质上是一个分布式矩阵结构,它根据样本的输入输出对加权法进行自我调整,从而近似模拟出输入、输出内在隐含的映射关系。
建模时,不必考虑各个因素之间的相互作用及各个因素对输出结果的影响机制,这恰好弥补了人们对各个因素及对输出结果的机制不清楚的缺陷,从而解决众多用以往方法很难解决的问题。
神经网络具有大规模的并行处理和分布式的信息存储,有良好的自适应、自组织性,学习能力很强,有较强的联想功能和容错功能,在解决机理比较复杂、无法用数学模型来刻画的问题,甚至对其机理一无所知的问题等,神经网络方法特别适用,是一种用于预测、评价、分类、模式识别、过程控制等各种数据处理场合的计算方法,其应用已经渗透到多个领域,在计算机视觉、模式识别、智能控制、非线性优化、信号处理、经济和机器人等方面取得了可喜的进展。
遗传算法与神经网络的结合

遗传算法与神经网络的结合近年来,随着人工智能领域的迅猛发展,遗传算法和神经网络分别作为两大重要技术,逐渐受到了研究者们的广泛关注。
遗传算法是通过模拟自然界中的进化思想,通过模拟生物遗传和进化的机制来搜索最优解的优化算法。
而神经网络则是模拟人脑神经元运作机制,通过输入输出之间的连接和权值来实现模式识别和计算的一种计算模型。
本文将探讨,以期在人工智能领域取得更好的应用效果。
首先,我们来看一下遗传算法和神经网络各自的优势。
遗传算法以其自动优化的特点被广泛应用于求解复杂问题。
它通过自然选择、交叉和变异等操作,将种群中适应度高的个体不断进化,从而找到最优解。
遗传算法在解决复杂、多变量问题时表现出了强大的优势,能够搜索到全局最优解。
而神经网络则以其强大的模式识别和学习能力而著称。
它通过神经元之间的连接和权值的调整,实现了对复杂非线性问题的建模和解决。
神经网络在图像识别、语音识别和自然语言处理等领域都取得了显著的成果。
然而,单一的遗传算法或神经网络在某些问题上可能存在局限性。
对于遗传算法而言,其搜索过程是基于群体的,可能会陷入局部最优解。
对于神经网络而言,其训练过程相对较慢,且对于参数的选择较为敏感。
为了克服这些问题,研究者们开始将遗传算法与神经网络相结合。
方式有多种。
其中一种常见的方式是通过遗传算法来优化神经网络的结构或参数。
在神经网络的训练过程中,通过遗传算法对神经网络的权值和偏置进行搜索和优化,以提高神经网络的性能。
另一种方式是将遗传算法的进化机制应用于神经网络的学习过程中。
通过模拟遗传算法的选择、交叉和变异等原理,对神经网络的连接结构和权值进行调整,以实现对神经网络的自适应调节和优化。
能够发挥二者的优点,弥补各自的不足。
首先,通过遗传算法的全局搜索能力,可以有效克服神经网络陷入局部最优解的问题。
其次,通过神经网络的模式识别和学习能力,可以提高遗传算法的搜索效率,使得算法能更快地找到最优解。
此外,还能够应对复杂问题,实现更复杂的模型和解决方案。
神经网络与遗传算法的结合
神经网络与遗传算法的结合随着人工智能技术的迅猛发展,神经网络和遗传算法分别成为了人工智能领域中最为重要的技术之一。
神经网络被广泛应用于语音识别、图像识别、自然语言处理等领域;而遗传算法则通常用于优化问题的求解,比如优化机器学习模型中的权重参数等。
那么,将两者结合起来,又会有怎样的效果呢?
首先,需要了解神经网络和遗传算法的基本原理。
神经网络是一种类似于人类大脑的结构,它由许多个神经元和连接它们的突触组成,可以通过训练来学习到输入和输出之间的映射关系。
而遗传算法则是一种模拟自然界中遗传过程的优化算法,通过基因变异、交叉等方式来生成新的解,并根据适应度函数对解进行评估和选择。
将神经网络和遗传算法结合起来,则可以让神经网络的学习过程更加高效,从而提高模型性能和泛化能力。
例如,可以将遗传算法用来优化神经网络中的权重参数,从而提高模型的准确性和鲁棒性。
同时,也可以利用遗传算法来搜索神经网络的结构,比如选择合适的激活函数、神经元个数等超参数。
在实际应用中,神经网络和遗传算法的结合已经得到了广泛应用。
例如,在图像识别领域中,可以使用遗传算法来选择最佳的卷积核大小和数量,从而得到更精确和鲁棒的模型。
在自然语言处理中,也可以使用遗传算法来寻找最佳的词向量表示,从而提高文本分类和情感分析的准确性。
此外,在机器学习模型训练过程中,可以使用遗传算法来调整学习率和批次大小等超参数,避免过拟合和欠拟合问题。
总之,神经网络和遗传算法的结合,可以为人工智能技术的发展带来更大的创新和突破。
未来,随着算力的不断提升和技术的不断进步,我们有理由相信,神经网络和遗传算法的结合将会越来越成熟,并为人类带来更加智能、高效的生产生活方式。
神经网络与遗传算法相似性比较
神经⽹络与遗传算法相似性⽐较2019-09-08摘要:⽂章通过将神经⽹络和遗传算法两种智能优化算法进⾏理论上的相似性对⽐,分析了两者各⾃具有的优点和缺点,指出⼆者的融合利⽤具有更⼴泛的发展前景。
关键词:神经⽹络;遗传算法;优化理论⼀、引⾔在⼈类的历史上,通过学习与模拟来增强⾃⾝适应能⼒的例⼦不胜枚举。
模拟飞禽,⼈类可以翱游天空;模拟游鱼,⼈类可以横渡海洋;模拟昆⾍,⼈类可以纵观千⾥;模拟⼤脑,⼈类创造了影响世界发展的计算机。
⼈类的模拟能⼒并不仅仅局限于⾃然现象和其它⽣命体。
⾃从20世纪后半叶以来,⼈类正在将其模拟的范围延伸向⼈类⾃⾝。
神经⽹络是⼈类对其⼤脑信息处理机制的模拟,早期的⾃动机理论假设机器是由类似于神经元的基本元素组成,从⽽向⼈们展⽰了第⼀个⾃复制机模型。
近年来诸如机器能否思维、基于规则的专家系统是否能胜任⼈类的⼯作、以及神经⽹络能否使机器具有⽣物功能已成为⼈⼯智能关注的焦点。
遗传算法是⼀种更为宏观意义下的仿⽣算法,它模仿的机制是⼀切⽣命与智能的产⽣与进化过程。
⼈类之所以能够向其⾃⾝的演化学习以增强决策问题的能⼒,是因为⾃然演化过程本质就是⼀个学习与优化的过程。
神经⽹络和遗传算法都是仿效⽣物处理模式以获得智能信息处理功能的理论,⼆者虽然实施⽅法各异,但⽬标相近,有很多特点相同,功能类似,对⼆者进⾏深⼊地对⽐研究,并取长补短,将⼆者综合运⽤是⾮常有意义的课题。
⼆、神经⽹络与遗传算法概述⾃1943年第⼀个神经⽹络模型MP模型提出⾄今,神经⽹络的发展⾮常迅速,特别是1982年提出的Hopfield⽹络模型和1985年提出的8P算法。
使神经⽹络逐步发展成为⽤途⼴泛的系统。
神经⽹络是由⼤量神经元⼴泛互连。
形成⼤规模并⾏处理和分布式的信息存储的复杂⽹络系统。
单⼀神经元可以有许多输⼊、输出。
神经元之间的相互作⽤通过连接的权重体现。
神经元的输出是其输⼊的函数。
虽然每个神经元的结构和功能极其简单和有限,但⼤量神经元构成的⽹络系统的⾏为则是丰富多彩的。
遗传算法在BP神经网络优化中的应用
遗传算法在 BP 神经网络优化中的应用2O世纪80年代后期 ,多机器人协作成为一种新的机器人应用形式日益引起国内外学术界的兴趣与关注.一方面,由于任务的复杂性,在单机器人难以完成任务时,人们希望通过多机器人之间的协调与合作来完成.另一方面,人们也希望通过多机器人间的协调与合作,来提高机器人系统在作业过程中的效率。
1943年,Maeullocu和 Pitts融合了生物物理学和数学提出了第一个神经元模型。
从这以后,人工神经网络经历了发展、停滞、再发展的过程,时至今日正走向成熟,在广泛领域里得到了应用,其中将人工神经网络技术应用到多机器人协作成为新的研究领域。
本文研究通过人工神经网络控制多机器人完成协作搬运的任务—3 J,并应用遗传算法来对神经网络进行优化。
仿真结果表明,经过遗传算法优化后的搬运工作效率显著提高,误差降低.1 人工神经网络 ANN)的基本原理和结构人工神经网络(Artiifcial Neural Network,ANN)) 是抽象、简化与模拟大脑神经结构的计算模型,又称并行分布处理模型 J。
ANN 由大量功能简单且具有自适应能力的信息处理单元——人工神经元按照大规模并行的方式通过一定的拓扑结构连接而成。
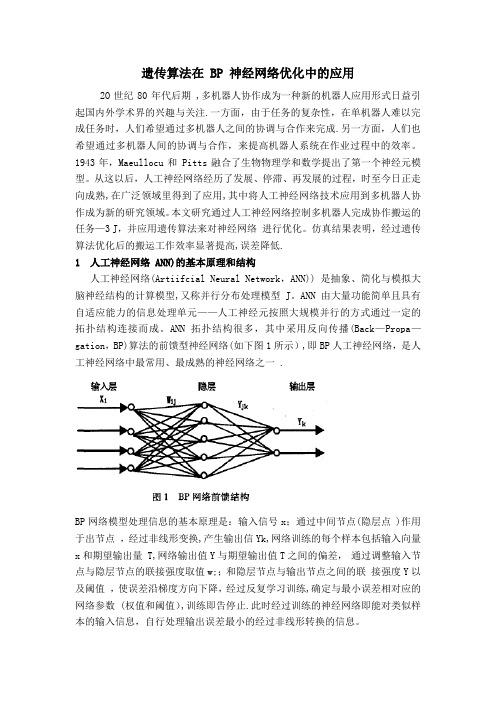
ANN拓扑结构很多,其中采用反向传播(Back—Propa—gation,BP)算法的前馈型神经网络(如下图1所示),即BP人工神经网络,是人工神经网络中最常用、最成熟的神经网络之一 .BP网络模型处理信息的基本原理是:输入信号x;通过中间节点(隐层点 )作用于出节点,经过非线形变换,产生输出信Yk,网络训练的每个样本包括输入向量x和期望输出量 T,网络输出值Y与期望输出值T之间的偏差,通过调整输入节点与隐层节点的联接强度取值w;;和隐层节点与输出节点之间的联接强度Y以及阈值,使误差沿梯度方向下降,经过反复学习训练,确定与最小误差相对应的网络参数 (权值和阈值),训练即告停止.此时经过训练的神经网络即能对类似样本的输入信息,自行处理输出误差最小的经过非线形转换的信息。
比较专家系统、模糊方法、遗传算法、神经网络、蚁群算法的特点及其适合解决的实际问题

比较专家系统、模糊方法、遗传算法、神经网络、蚁群算法的特点及其适合解决的实际问题一、专家系统(Expert System)1,什么是专家系统?在日常生活中大家所认知的“专家”一般都拥有某一特定领域的大量专业知识,以及丰富的实际经验。
在解决问题时,专家们通常拥有一套独特的思维方式,能较圆满地解决一类困难问题,或向用户提出一些建设性的建议等。
专家系统一般定义为一个具有智能特点的计算机程序。
它的智能化主要表现为能够在特定的领域内模仿人类专家思维来求解复杂问题。
因此,专家系统必须包含领域专家的大量知识,拥有类似人类专家思维的推理能力,并能用这些知识来解决实际问题。
专家系统的基本结构如图1所示,其中箭头方向为数据流动的方向。
图1 专家系统的基本组成专家系统通常由知识库和推理机两个主要组成要素。
知识库存放着作为专家经验的判断性知识,例如表达建议、 推断、 命令、 策略的产生式规则等, 用于某种结论的推理、 问题的求解,以及对于推理、 求解知识的各种控制知识。
知识库中还包括另一类叙述性知识, 也称作数据,用于说明问题的状态,有关的事实和概念,当前的条件以及常识等。
专家系统的问题求解过程是通过知识库中的知识来模拟专家的思维方式的,因此,知识库是专家系统质量是否优越的关键所在,即知识库中知识的质量和数量决定着专家系统的质量水平。
一般来说,专家系统中的知识库与专家系统程序是相互独立的,用户可以通过改变、完善知识库中的知识内容来提高专家系统的性能。
推理机实际上是一个运用知识库中提供的两类知识,基于木某种通用的问题求解模型,进行自动推理、 求解问题的计算机软件系统。
它包括一个解释程序, 用于决定如何使用判断性知识推导新的知识, 还包括一个调度程序, 用于决定判断性知识的使用次序。
推理机的具体构造取决于问题领域的特点,及专家系统中知识表示和组织的方法。
推理机针对当前问题的条件或已知信息,反复匹配知识库中的规则,获得新的结论,以得到问题求解结果。
基于神经网络的遗传算法求解NP问题研究
基于神经网络的遗传算法求解NP问题研究随着科技的不断进步和人们对计算机算法的不断研究,对于求解NP问题的算法也有了极大的发展。
其中基于神经网络的遗传算法被认为是一种比较有效的求解NP问题的算法。
本文将探讨基于神经网络的遗传算法求解NP问题的研究,并分析其原理和应用。
一、神经网络神经网络是一种以人类大脑神经系统为模型的计算机系统。
其基本构成模块是神经元,它们通过突触进行相互交流并接收和处理外部信息。
神经网络在处理模式识别、图像识别、语音识别等方面具有广泛的应用。
二、遗传算法遗传算法是一种基于进化论的优化算法。
其优化过程仿佛在模拟生物进化过程,利用遗传操作和自然选择过程来寻找最优解。
使用遗传算法可以在非线性、非连续、非确定问题中寻找全局最优解。
三、基于神经网络的遗传算法基于神经网络的遗传算法,是将神经网络与遗传算法相结合的一种求解问题的方法。
其基本思路是,利用神经网络处理问题数据并加入遗传算法的优化过程,既可以保留神经网络的优良性质,又可以较好地解决NP问题。
四、基于神经网络的遗传算法求解NP问题NP问题通常是指在计算机科学和数学中不易找到行之有效算法的一类问题。
求解NP问题的效率往往需要巨大的计算资源和时间。
因此,基于神经网络的遗传算法成为了求解NP问题的一种较可行的方法。
在基于神经网络的遗传算法中,首先通过随机初始化得到一些输入数据,并通过神经网络处理得到一些输出数据。
这些输出数据作为遗传算法的初始种群,经过遗传算法的基本操作(选择、交叉、变异),产生新的种群,不断迭代,直到得到最优解,完成求解。
五、基于神经网络的遗传算法在实际问题中的应用基于神经网络的遗传算法在实际问题中有着广泛的应用。
例如,在图像识别、语音识别、数据挖掘、人工智能等领域,基于神经网络的遗传算法已成为一种常用的求解问题的手段。
比如,基于神经网络的遗传算法可以用于自动化的图像或语音分析和分类,能够提高数据处理的准确率和速度。
六、总结总的来看,基于神经网络的遗传算法是一种有效的求解NP问题的方法。
神经网络遗传算法极值寻优
神经网络遗传算法极值寻优【摘要】:阐明了遗传算法和神经网络结合的可行性和优越性,用遗传算法和神经网络结合的方法求解了非线性函数的最优解。
设计了用遗传算法训练神经网络权重的方法,实验结果表明了遗传算法快速学习网络权重的能力,并且能够摆脱局部极点的困扰。
【关键词】:遗传算法神经网络1. 引言智能包括高层次的是生物智能(BI),其次是人工智能(AI ),处于低层次的是计算智能(CI )。
在计算智能中,计算的概念是传统计算概念的拓展,计算对象不局限于数和字符,运算符号也不再局限于加减乘除等运算,在这个范畴内的加减乘除也需赋予新的含义[6]。
但一般来说,AI 偏重于逻辑推理,而CI 则偏重于数值计算。
现在,计算智能已取得一定的研究成果,其主要技术包括模糊技术、神经网络、进化计算等[ 5] 。
这几项技术各自均有了数十年的历史,但当时这些方法并未受到足够的重视,一是当时这些方法还不很成熟,二是受当时计算机软硬件的限制。
而这些方法一般需要较大的计算量,在实际应用中比较难实现[4]。
随着计算机技术的发展和普及,它们在最近这些年得到了突飞猛进的发展,引起了诸多领域专家学者的关注,成为一个跨学科的研究热点。
近年来,这些方法呈互相融合的趋势[ 3],它们之间的互补可以弥补相互之间的不足,从而获得更好的解决实际问题的能力。
如对模糊神经网络、模糊遗传算法、模糊分类器系统、用遗传算法优化模糊系统的隶属度函数及神经网络的进化设计方法等的研究都体现了这种融合的优点[ 1,2] 。
2. 问题描述对于非线性函数的极值问题,仅通过函数的输入输出数据难以准确寻找未知的非线性函数的极值。
这类问题的求解可以通过神经网络结合遗传算法来得到,利用神经网络的非线性拟合能力和遗传算法的非线性寻优能力寻找函数极值。
本文用神经网络遗传算法寻优如下非线性函数极值。
该函数的全局最小值为0,对应的坐标为(0 ,0)。
虽然从函数方程和图形中很容易找出函数极值及极值对应坐标,但是在函数方程未知的情况下函数极值及极值对应坐标很难找到。
MATLAB中的神经网络与遗传算法联合优化实例分析

MATLAB中的神经网络与遗传算法联合优化实例分析神经网络和遗传算法是两种常用的智能优化方法,它们在不同领域的问题求解中发挥了重要作用。
而将这两种方法结合起来,可以进一步提升算法的性能和效果。
本文将介绍MATLAB中如何使用神经网络和遗传算法联合优化,并通过一个实例进行分析和验证。
首先,我们先来了解一下神经网络和遗传算法的基本原理。
神经网络是一种模拟生物神经系统的计算模型,它由多个神经元组成,通过学习调整神经元之间的连接权重,从而实现对输入数据的非线性映射和分类。
而遗传算法则是一种模拟生物进化过程的优化方法,通过不断迭代和交叉变异的方式搜索最优解。
在MATLAB中,可以使用Neural Network Toolbox和Global Optimization Toolbox分别实现神经网络和遗传算法的优化。
下面我们将以一个分类问题为例,演示如何使用这两种方法联合优化。
假设我们需要构建一个神经网络模型,对一个包含多个特征的数据集进行分类。
首先,我们可以使用Neural Network Toolbox搭建一个基本的神经网络结构。
通过设定输入层、隐层和输出层的神经元个数,以及选择合适的激活函数和损失函数,我们可以训练得到一个初步的神经网络模型。
然而,这个初步模型可能并不是最优的,它可能存在欠拟合或过拟合的问题。
为了进一步提升模型的性能,我们可以引入遗传算法进行优化。
具体做法是将神经网络的连接权重作为遗传算法的优化变量,通过遗传算法的搜索过程来调整权重,以寻找最优解。
在全局优化问题中,遗传算法能够避免陷入局部最优解,并且具有较好的鲁棒性。
在MATLAB中,Global Optimization Toolbox提供了ga函数来实现遗传算法的优化。
我们可以将神经网络的连接权重作为输入变量,定义一个适应度函数来评估神经网络模型的性能,然后通过调用ga函数进行优化求解。
在每次迭代中,遗传算法将根据适应度函数的评估结果来调整权重,直至找到最优解。
神经网络PPT课件-基于MATLAB算法(BP.遗传算法.RBF.小波)
正因为人工神经网络是对生物神经网络的模仿,它具有一些传统 逻辑运算不具有的优点。主要包括: 一、非线性。非线性是自然界的普遍特性。人脑的思考过程就是 非线性的。人工神经网络通过模仿人脑神经元结构的信息传递过 程,可以进行线性或者非线性的运算,这是人工神经网络的最特 出的特性。
二、自适应性。神经网络的结构中设置了权值和阈值参数。网络 能够随着输入输出端的环境变化,自动调节神经节点上的权值和 阈值。因此,神经网络对在一定范围变化的环境有பைடு நூலகம்强的适应能 力。适用于完成信号处理、模式识别、自动控制等任务。系统运 行起来也相当稳定。
③引入陡度因子
误差曲面上存在着平坦区域。权值调整进入平坦区的原因是神经元输出进入了转 移函数的饱和区。如果在调整进入平坦区域后,设法压缩神经元的净输入,使其 输出退出转移函数的饱和区,就可以改变误差函数的形状,从而使调整脱离平坦 区。实现这一思路的具体作法是在原转移函数中引入一个陡度因子。
BP神经网络的MATLAB算法
BP神经网络模型
• BP (Back Propagation)神经网络,即误差反向传播算法的学习过 程,由信息的正向传播和误差的反向传播两个过程组成。输入 层各神经元负责接收来自外界的输入信息,并传递给中间层各 神经元;中间层是内部信息处理层,负责信息变换,根据信息 变化能力的需求,中间层可以设计为单隐含层或者多隐含层结 构;最后一个隐含层传递到输出层各神经元的信息,经进一步 处理后,完成一次学习的正向传播处理过程,由输出层向外界 输出信息处理结果。
l n 1 l
m n a
l log 2 n
步骤2:隐含层输出计算 根据输入变量 X,输入层和隐含层间连接权值 ij 以及隐含层阈值 a, 计算隐含层输出H。
遗传算法和BP神经网络在水电站经济优化调度中的应用毕业论文
摘要水电站优化调度,旨在充分利用水资源,使发电量最大,从而提高经济效益。
本文的研究对象是在电厂出力给定时以及各种约束条件下,如何求解厂内机组间有功负荷的最优分配问题。
从而合理安排水电站的运行方式,改善电厂及整个电力系统的供电质量、提高运行可靠性。
本文主要讲述了遗传算法和BP神经网络在水电站经济优化调度中的应用,对经济调度、遗传算法和BP神经网络的基本原理进行了综述。
本文具体分析水力发电机组耗流量和机组间负荷最优分配的计算方法,建立了机组的耗流量模型和优化运行模型,为水电站优化调度的研究打下了理论基础。
基于VB平台的“经济优化调度”软件的研究与开发,是利用面向对象的编程技术,设计出与Windows操作系统风格一致的界面。
使用Access软件进行水电站厂内各机组的数据库设计,应用Visual Basic (VB)语言进行程序化水电站的“经济优化调度”。
关键词:遗传算法;BP神经网络;电力系统经济调度;VBAbstractThe power station optimizes dispatchers, in order to fully utilize the water resource, make generation largest, thus increase economic efficiency.The research object of this text is how to solve the distribution of the factory Units Active optimal load when the power plant exerts oneself and gives definitely and under various kinds of restraint terms, thus reasonable arrangements for the operation of hydropower stations, and the entire plant to improve the electricity supply system of quality and reliability. This text has mainly told that the hereditary algorithm and BP neural network optimize the application of dispatchers in the economy of the power station, and I make the Summary Including the survey to economic dispatcher, hereditary algorithm and basic principle of BP neural network.This stationery body analysis water conservancy generating set dawdle flow and load optimum computing technology that assign among the aircrew, have set up consuming the flow model and optimizing the model of operating of the aircrew, and has laid the theoretical foundation in research of optimizing the dispatcher for the power station.Based on the research and development of software of "economy optimizes dispatchers" on VB platform, i utilize programming technology facing target to design the interface keeping the same with Windows operating system style. First i use access software to carry on the design of storehouse of data of every unit in the factory of power station. Second, i use Visual Basic (VB) to Program the procedure power station "economy is optimized and managed ".Key words: Genetic algorithm;BP Nerve network;power System;Economic dispatch;Visual Basic毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图5.37 由此,我们给出感知机学习规则算法步骤为: 用 t 表示学习步骤的序号, t 0 表示学习前的神经网络的初始状态。 第1步:赋初值。 给网络上权数和阈值赋初值,如 wij 0,i 0 ; 第2步:计算样本实际输出。 选择一个样本作为网络输入,计算样本在目前神经网络中的实际输出。如,对于第 p 个 样本,感知机输出为:
图 5.35 神经网络一般都有多层,分为输入层,输出层和隐含层,层数越多,计算结果越精确, 但所需的时间也就越长,所以实际应用中要根据要求设计网络层数。 神经网络中每一个节 点叫做一个人工神经元,他对应于人脑中的神经元。人脑神经元由细胞体、树突和轴突三部 分组成,是一种根须状蔓延物。神经元的中心有一闭点,称为细胞体,它能对接受到的信息 进行处理,细胞体周围的纤维有两类,轴突是较长的神经纤维,是发出信息的。树突的神经 纤维较短,而分支众多,是接收信息的。一个神经元的轴突末端与另一神经元的树突之间密
Y ( p ) (Y1 ( p ), ,Y ( p )) , n
其中, Yi ( p ) f (
w x
ij
j
i ),i 1, , n
第3步:计算误差。 计算感知机输出的实际结果与期望输出之差: t D p Y p 第4步:权数修正。 如果 t 0 ,则转第2步,否则调整权值:
Y f (W T X )
其中,W ( wij ) mn 为权系数矩阵, X ,Y, 分别为输入向量、输出向量及阈值向量。 确定权数 wij 的基本思想是修正 wij 使得输入输出偏差尽可能小。权的修正公式为:
W (t 1) W (t ) W (t ), W (t ) ( w ij(t )) , wij (t ) t (d j (t ) y j (t )) xi (t )
1 , 这是因为S 1 e z
型函数有很好的函数特性,其效果又近似于符号函数,现主要讨论采用S型函数的多层前向 神经网络的学习方法。 假设有一个 K 层的神经网络,从第0层到第1层的原始输入向量、权矩阵、第1层神经元 接受向量和第1层输出向量以及它们之间的关系为:
1 1 z1 y1 x1 1 1 x z2 y2 2 X , W1 (w1 ) n0 n1 , Z1 W1T X , Y1 f (Z1 ) ij 1 1 xn0 zn1 yn1 第 k 1 层到第 k 层的权矩阵、神经元接受向量和输出向量以及它们之间的关系分别为:
z1k y1k k k z2 y2 T k Wk Yk 1 , Yk f (Z k ) Wk (wij )nk 1nk , Z k k k znk ynk
其中, yi f ( zi ) 。 我们先讨论单样本学习规则。学习规则是:确定 W ,使得
Wi ( p 1) Wi ( p ) Wi ( p ), Wi ( p ) t xi
第5步:若训练样本已完全输入或输出误差小于预设值,则学习结束;否则,转第2步 继续学习。 如果对给定的两类样本数据(通常就是用于学习的输入数据),在空间中可以用一条直线 (平面)将其分开,则称该样本数据是线性样本,否则称为非线性样本,对样本进行分类或 识别即属于人工神经网络的重要应用之一。 感知机可以识别二值逻辑加问题, 而不能识别异 或问题。对于非线性问题,可以用反向传播(BP)模型解决。 4. BP网络
图5.38 多层前向神经网络结构 BP网络应用得最为广泛,最为重要的一种神经网络。这种网络一般有多层,有输入层, 输出层和隐含层, 上一层的输出即是下一层的输入, 输出层所在的层数就是神经网络的层数。 一般的多层前向神经网络结构如图5.38所示。 在实际应用中, BP网络的激活函数一般采用 S型函数: f ( z )
m n
,其中,
xi (t ),d j (t ),i 1, , m,j 1, , n 分别表示第 t 组用于学习的输入和期望输出数据, t
称为学习效率,用于控制调整速度。与权值修正原理类似,阈值修正公式可假设为: 通过更新权数和阈值使得输入输出偏差 (t 1) (t ) (t ), (t ) t (d j (t ) y j (t )) n 1 , 趋于零。若将激活函数 f () 取为阶跃函数,上述思想即是感知机原理。
,Y (t ) ; 第2步:用学习数据 X (t ) 计算 Y1 (t ),Y2 (t ), k
T
第3步:计算
①
F (W ) w K ij nK 1nK
K
y1K 1 K 1 K K dy1K dy2 dyn y2 T , 2 ( BK ) BK diag K , K , , KK WK 1BK 1 dz nK dz1 dz2 K 1 y nK 1
5.4 神经网络与遗传算法简介
在本节中,我们将着重讲述一些在网络设计、优化、性能分析、通信路由优化、选择、 神经网络控制优化中有重要应用的常用的算法,包括神经网络算法、遗传算法、模拟退火算 法等方法。用这些算法可以较容易地解决一些很复杂的,常规算法很难解决的问题。这些算 法都有着很深的理论背景, 本节不准备详细地讨论这些算法的理论, 只对算法的原理和方法 作简要的讨论。
5.4.1 神经网络
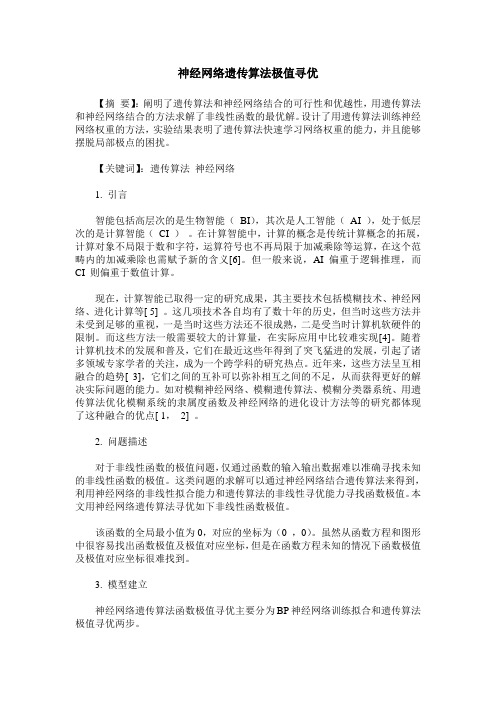
1. 神经网络的简单原理 人工神经网络( Artificial Neural Networks, 简写为ANNs)也简称为神经网络(NNs) 或称作连接模型( Connectionist Model ) ,是对人脑或自然神经网络( Natural Neural Network)若干基本特性的抽象和模拟。人工神经网络以对大脑的生理研究成果为基础的, 其目的在于模拟大脑的某些机理与机制,实现某个方面的功能。所以说, 人工神经网络是由 人工建立的以有向图为拓扑结构的动态系统, 它通过对连续或断续的输入作出状态相应而进 行信息处理。 它是根据人的认识过程而开发出的一种算法。 假如我们现在只有一些输入和相 应的输出, 而对如何由输入得到输出的机理并不清楚, 那么我们可以把输入与输出之间的未 知过程看成是一个“网络”,通过不断地给这个网络输入和相应的输出来“训练”这个网 络,网络根据输入和输出不断地调节自己的各节点之间的权值来满足输入和输出。这样,当 训练结束后,我们给定一个输入,网络便会根据自己已调节好的权值计算出一个输出。这就 是神经网络的简单原理。 2. 神经元和神经网络的结构 如上所述,神经网络的基本结构如图5.35所示:
y f z sgn( wi x i ),
i 1
n
其中, sgn() 为符号函数, 称为阈值。 一般来说,一个人工神经元有多个输入和一个输出,另外有一个激活函数,不同的激 发函数对应了不同的网络,也决定了网络的用途。从方程可以看出,当 wi 确定时,任给一 组输入 xi,i 1, , n ,也就很容易得到输出。而现在我们的想法是:对给定的输入,确定 权数 wi ,使得通过方程计算出来的输出尽可能与实际值吻合,这即是学习的过程。学习也 称为训练,指的是通过神经网络所在环境的刺激作用调整神经网络的权数 wi ,使得神经网 络对外部环境以一种新的方式作出反应。 学习分为有指导学习和无监督学习: 在有正确输入 输出数据条件下调整和确定权数 wi 的方法称为有指导学习;而在只知输入数据不知输出结 果的前提下确定权数的方法称为无监督学习。 人工神经网络的主要工作就是通过学习, 建立 模型和确定 wi 的值。 神经网络按照网络结构和激发函数的不同可分为许多种,我们在此只对感知器、BP网 络及Hopfield神经网络进行简介。 3.感知机 首先介绍单层前向神经网络。单层前向神经网络的模型结构如图5.37所示。 或用矩阵表示为
k k
F (W ) ( D YK ) T ( D YK )
最小,其中 D (d1,d 2, ,d nK ) 为理想输出。 采用S型函数的前向多层神经网络的反推学习(BP)算法步骤如下: 第1步:选定学习的数组 { X (t ),D(t )},t 1, 2, , T ,随机确定初始权矩阵 W (,可用于以下方面:①函数逼近:用输入矢量和相应的输出矢 量训练一个网络逼近一个函数; ②模式识别: 用一个特定的输出矢量将它与输入矢量联系起 来;③分类:把输入矢量以所定义的合适方式进行分类;④数据压缩:减少输出矢量维数以 便于传输或存储。 5. Hopfield神经网络 前面介绍的感知机和BP网络都属于前向网络。前向网络结构简单、易于编程,但计算 能力不够强大。反馈神经网络是一个反馈动力学系统,具有更强的计算能力。其一般结构如 图5.39所示。
第5步:循环利用 T 个学习样本,重复第2步~第4步,对网络权数进行调整,直到整个 训练集误差最小(网络达到稳定状态)。 当激活函数 f ( x )
1 时, 1 e x
dy k j dz k j
k f (zk j 1, , nk ,代入①、②、③使计算可以得以 j )(1 f ( z j )),i 1, , nk 1,
y1k 1 k 1 y2 2 ( B )T , k k 1 ynk 1
k k dy1k dy2 dyn 其中, Bk diag k , k , , k k Wk 1Bk 1 。 dz nk dz1 dz2
切接触,传递神经元冲动的地方称为突触。经过突触的信息传递是有方向性的,不同的突触 进行的冲动传递效果不一样,有的使后一神经元发生兴奋,有的使其发生抑制。 由人脑神经元的工作机理,人们构造了人工神经元的数学模型,它是人脑的模拟和简 化,如图5.36所示。
图5.36 McCulloch-Pitts网络 在图中, wi 是表示神经元对信息 xi 的感知能力,称为关联权, f z 称为输出函数或 激活函数,采用激活函数的人工神经网络也称阈网络。McCulloch-Pitts输出函数定义为