检测技术实验报告东南大学
东南大学软件测试实验报告材料一
软件测试基础与实践实验报告实验名称:白盒测试实验一实验地点:计算机软件楼实验日期: 2016.11.6学生姓名:王鑫学生学号: 71114430 东南大学软件学院制一、实验目的(1)巩固白盒测试知识,对于给定的待测程序,能熟练应用基本控制流覆盖方法设计测试用例;(2)通过绘制程序控制流程图,实现对于程序源代码的逻辑描述(3)培养严谨的测试精神,学习测试用例的设计和分析二、实验内容(一)实验一: 控制流测试技术实验2.1 语句覆盖3.进一步用路径覆盖准则测试getWeekday()分析:非正常输出,return 0,-1,-2,-3,共4条路径。
之前有一条if语句,所以共2*4=8条路径。
正常输出,总共有4个if语句(把循环简化成if语句),分别有2,3,4,2条路径,所以总共有2*3*4*2=48条路径。
总共8+48=56条路径。
平均一条路径对应一个测试用例,需要1分钟给出,整个也要1个小时左右才能完成路径覆盖测试。
4.MC/DC(修订的判定条件覆盖)上述判定表达式只有TFT,TFF,TTF,FTF四种取值。
测试用例P1和P4比较得条件a独立;测试用例P3和P4比较得条件b独立;测试用例P2和P3比较得条件c独立。
三、实验体会(1)没有测出缺陷,但实际上存在缺陷。
这说明动态白盒测试并不能完全测出缺陷。
每种测试方法都存在弊端。
语句覆盖:很难达到100%的覆盖,是比较弱的覆盖;判定覆盖:容易忽略布尔表达式的分支和逻辑短路;条件覆盖:与判定覆盖类似,但比判定覆盖覆盖率高;判定条件覆盖:可能会有错误屏蔽现象;条件组合覆盖:比之前的覆盖率都高,但也存在漏洞。
(2)程序存在缺陷,如day取值为0这种错误输入时,依然有结果;month取值为0,程序报错;year取值为0,输出结果和取值为1时一样。
改进:程序代码21-22句多余,因为2月日期数的计算在2-3句已经分析过了,没必要再重复写判断语句。
(3)关键:1.做出正确有美观的流程图。
东南大学检测技术第4次实验报告

东南大学自动化学院实验报告课程名称:检测技术第 4 次实验实验名称:实验十七、实验三十二、实验三十四、实验三十五院(系):自动化专业:自动化姓名:学号:实验室:常州楼5楼实验组别:同组人员:实验时间:2016年12月30日评定成绩:审阅教师:目录实验十七霍尔转速传感器测电机转速实验一、实验目的 (3)二、基本原理 (3)三、实验器材 (3)四、实验步骤 (3)五、实验数据处理 (4)六、思考题 (4)实验三十二光纤传感器的位移特性实验一、实验目的 (5)二、基本原理 (5)三、实验器材 (5)四、实验步骤 (5)五、实验数据处理 (6)六、思考题 (6)实验三十四光电转速传感器的转速测量实验一、实验目的 (7)二、基本原理 (7)三、实验器材 (7)四、实验步骤一 (7)五、实验数据处理 (8)六、思考题 (9)实验三十五光电传感器控制电机转速实验一、实验目的 (9)二、基本原理 (9)三、实验器材 (10)四、调节仪简介 (10)五、实验步骤 (12)六、思考题 (14)实验十七霍尔转速传感器测电机转速实验一、实验目的了解霍尔转速传感器的应用。
二、基本原理利用霍尔效应表达式:U H =K H ·I B ,当被测圆盘上装上 N 只磁性体时,圆盘每转一周磁场就变化 N 次。
每转一周霍尔电势就同频率相应变化,输出电势通过放大、整形和计数电路计数就可以测量被测物体的转速。
三、实验器材主机箱、霍尔转速传感器、转动源。
四、实验步骤1、根据图 5-5 将霍尔转速传感器安装于霍尔架上,传感器的端面对准转盘上的磁钢并调节升降杆使传感器端面与磁钢之间的间隙大约为 2~3mm。
2、在接线以前,先合上主机箱电源开关,将主机箱中的转速调节电源 2~24v 旋钮调到最小(逆时针方向转到底),接入电压表(显示选择打到 20v 档),监测大约为1.25v;关闭主机箱电源,将霍尔转速传感器、转动电源按图 5-5 所示分别接到主机箱的相应电源和频率/转速表(转速档)的 Fin 上。
东南大学数学实验报告

东南大学数学实验报告
实验题目:热传导
实验目的:
1. 通过实验探究热传导的规律以及热传导的特性;
2. 认识热传导的概念与重要性,在实验中了解其应用;
3. 学习使用实验仪器并掌握相应的实验操作方法。
实验流程和原理:
在实验室准备好实验所需的仪器材料,包括热传导仪器、测试温度计、计时器、热导特性测试样品等。
1. 首先,准备好两个相同的热导测试样品,将它们连接到仪器的不同端口,并将一个温度计夹在热导测试样品的中间,另一个温度计则放在测试样品的一侧。
2. 然后,通电使得热传导仪器工作,在一段时间内观察测量的
数据的变化,并记录下来。
3. 在得到足够多的数据之后,按照实验流程进行数据处理和分析,计算出热传导系数以及对获得的结果进行解释和分析。
实验结果:
通过实验,我得到了两个样品之间热传导系数的实验结果,结
果显示,在热导测试样品中,热传导系数随着时间的递增而增加,且两样品热传导系数不同,在测试过程中,样品之间的温度差也
随之增加。
实验结论:
从实验结果中可以得到,热传导系数和材料本身的热导率,温度、时间和热导特性等因素有着密切的关系。
此外,通过实验,
我还对于热传导技术的使用和应用有了更深的认识,它在工业生产、环境监测等各个领域有着重要的应用价值。
实验总结:
通过本次实验,我学习了热传导的基本概念和特性,同时也掌握了使用实验仪器进行实验的方法和技巧。
对于数学和物理等领域的学科知识,有了更加深入的了解和认识。
同时,我也注意到实验结果的不确定性和误差存在,需要在日后的实验学习中加以注意和掌握。
(最新版)东南大学现代监测技术实验报告
东南大学自动化学院实验报告课程名称:现代检测技术实验1、3、5、8、9实验名称:现代检测技术院(系):自动化专业:自动化姓名:谢嘉宇学号:实验室:实验室实验组别:同组人员:周宸楠叶占伟实验时间:2013年11月16日评定成绩:审阅教师:目录一.金属箔式应变片——单臂电桥性能实验二.金属箔式应变片——全桥性能实验三.差动变压器的性能实验四.差动变压器的应用—振动测量实验五.电容式传感器的位移实验一.实验目的和要求1、了解金属箔式应变片的应变效应及单臂电桥工作原理和性能。
3、了解全桥测量电路的优点。
5、了解差动变压器的工作原理和特性。
8、了解差动变压器测量振动的方法。
9、了解电容式传感器结构及其特点。
二.实验原理1、电阻丝在外力作用下发生机械变形时,其电阻值发生变化,这就是电阻应变效应。
描述电阻应变效应的关系式为:ΔR/R=Kε。
式中:ΔR/R 为电阻丝电阻相对变化,K 为应变灵敏系数,ε=ΔL/L 为电阻丝长度相对变化。
金属箔式应变片就是通过光刻、腐蚀等工艺制成的应变敏感元件,通过它反映被测部位受力状态的变化。
电桥的作用是完成电阻到电压的比例变化,电桥的输出电压反映了相应的受力状态。
单臂电桥输出电压Uo1= EKε/4。
3、全桥测量电路中,将受力方向相同的两应变片接入电桥对边,反的应变片接入电桥邻边。
当应变片初始阻值R1=R2=R3=R4、其变化值ΔR1=ΔR2=ΔR3=ΔR4 时,其桥路输出电压Uo3=KEε。
其输出灵敏度比半桥又提高了一倍,非线性误差和温度误差均得到改善。
5、差动变压器由一只初级线圈和二只次线圈及一个铁芯组成,根据内外层排列不同,有二段式和三段式,本实验采用三段式结构。
当被测体移动时差动变压器的铁芯也随着轴向位移,从而使初级线圈和次级线圈之间的互感发生变化促使次级线圈感应电势产生变化(一只次级感应电势增加,另一只感应电势则减少)。
将两只次级反向串接(同名端连接),引出差动电势输出。
东南大学胥明实验报告

实习报告报告人:XXX学号:xxxxx指导老师:胥明实习时间:201x.8.19—201x.8.30实习地点:江苏东大工程检测技术有限公司为了进一步学会运用力学专业的知识,提高实践操作技能,短学期开学,我们班就在胥明老师的指导下,在江苏东大工程检测技术有限公司开始了为期两周的工程检测实习。
结合我们力学专业三年来所学习过的专业知识以及江苏东大工程检测技术有限公司经常开展的检测项目,我们主要进行了梁板式橡胶支座抗压弹性模量、预应力钢绞线拉伸、板式橡胶支座抗剪弹性模量、钢结构高强螺栓、下水道环刚度、预应力钢绞线松弛等检测项目。
此外,我们还在胥老师的带领下参观了其他检测试验和结构试验室。
对于钢绞线的力学性能的测试,主要分为钢绞线的拉伸和应力松弛。
在钢绞线的拉伸试验中,由于对于实验者的操作经验要求很高,我们没有动手操作的能力,而是观看了试验室老师们的实验过程。
首先是对试件进行安装,特别需要注意的是对标距的控制以及对试件端部的夹紧,并要保证夹具的三块不同部分在同一平面内,否则会严重影响实验结果。
本次试验后,我们对所采集到的数据进行了处理,并画出了趋势线,这样更加直观的反应出试件的抗拉弹性模量和规定非比例延伸率以及屈服强度。
在钢绞线的松弛试验中,我们仔细的记录了每隔一分钟钢绞线受力的特性,并利用excel表格分析推测了1000h后钢绞线的应力松弛率。
本次试验温度对检测结果的影响很大,因此,要想成功做出试验结果必须使温度保持在一个定值。
应力松弛试验装置对高强螺栓的抗扭系数的测定,这个试验完全由我们自行完成。
试验的关键在于高强螺栓的安装,将其夹在夹具上时必须将六角螺栓的六个边与夹具边贴合,否则在加扭矩的时候,会把螺栓夹坏。
记录最大扭力、当前轴力和扭矩系数后,可以通过分析数据的算术平均值跟标准差来判断本次试验的结果。
这次试验由于完全是由试验者控制施加扭矩的,对于轴力的把握准确度不太够,所得到的数据误差有些大,但是试验结果基本符合实际参数。
测试技术课程论文实验报告
东南大学机械学院机械制造工程原理实验报告专业:机械工程及自动化实验组别:实验者姓名:王安俊学号:02010420 实验时间:2013 年5月31日评定成绩:报告审阅教师实验一车刀角度的测量一、实验目的1.熟悉车刀切削部分的构造要素,掌握车刀标注角度的参考平面、参考系及车刀标注角度的定义;2.了解车刀量角台的结构,学会使用车刀量角台测量车刀的标注角度;3.绘制车刀标注角度图,并能够在图中准确标注出测量得到的车刀各标注角度数值。
二、实验仪器设备车刀角度测量仪外圆车刀、切断刀、45°弯头车刀、螺纹刀等三、测量原理与实验内容车刀标注角度可以用角度样板、万能量角仪、重力量角器以及各种车刀量角台等进行测量。
其测量的基本原理是:按照车刀标注角度的定义,在被测量切削刃(刀刃)的选定点,用测量工具的尺面,如量角器的尺面或量角台的指针平面(或侧面或底面),与构成被测角度的面或线紧密贴合(或相平行或相垂直),把需要测量的角度测量出来。
由于所使用的测量工具(量角器或量角台)的结构各不相同,其测量的方法也不同。
下面以使用车刀量角仪来测量车刀标注角度为例,说明车刀量角仪的结构及其测量方法。
(一)车刀量角仪的结构车刀量角仪是测量车刀标注角度的专用测量工具,它既能测量车刀主剖面参考系的基本角度,又能测量车刀法剖面参考系的基本角度,车刀量角仪的结构如图1-1所示。
1-1 车刀量角仪1、圆盘底座2、车刀工作台 2a、工作台指针 2b、滑动刀台 2c、固紧螺钉 2d、被测量刀具3、主量角器 3a、量刀板及指针 3b、升降螺母4、副量角器 4a、指针 4b、固紧手轮 4c、摇臂5、附件 5a、立柱 5b、量角器支座 5c、手轮(二)测量车刀标注角度1、校准车刀量角仪的原始位置2、测量主偏角K r3、测量刃倾角λS4、测量副偏角Kr′5、测量前角r06、测量后角∂0(三)计算车刀派生角度并绘制车刀角度图四、实验数据与结果(一)实验记录(将测得数据填入下表)(二)根据测量所得角度分别绘制各车刀标注角度图二、思考题1、用车刀量角仪测量车刀主剖面前角r0和后角∂0时,为什么要让工作台从原始位置起,逆时针方向转动φr=90°-Kφ的角度?2、为什么用车刀量角仪测量车刀法剖面前角r0和后角∂0时,小指针(连同弯板)要旋转一个刃倾角λS的数值?3、用45°弯头车刀车外圆和车端面时,其主、副刀刃和主、副偏角是否发生变化?为什么?切断车刀有几条刀刃?哪条是主刀刃?哪条是副刀刃?试分别以图示说明。
东南大学现代检测技术第四次实验
检测技术实验报告院(系):自动化专业:自动化姓名:学号:同组人员:评定成绩:评阅教师:实验一:发光二极管(光源)的照度标定一、实验目的:了解发光二极管的工作原理及工作电流与光照度的对应关系。
二、需用器件与单元:主机箱(恒流源、电流表、照度表);照度计探头;发光二极管;遮光筒。
三、实验原理:发光二极管是由Ⅲ-Ⅳ族化合物,如GaAs(砷化镓)、GaP(磷化镓)、GaAsP(磷砷化镓)等半导体制成的,其核心是PN结。
因此它具有一般P-N结的I-N特性,即正向导通,在正向电压下,电子由N区注入P区,空穴由P区注入N区。
进入对方区域的少数载流子(少子)一部分与多数载流子(多子)复合而发光,假设发光是在P区中发生的,那么注入的电子与价带空穴直接复合而发光,或者先被发光中心捕获后,再与空穴复合发光。
除了这种发光复合外,还有些电子被非发光中心(这个中心介于导带、介带中间附近)捕获,而后再与空穴复合,每次释放的能量不大,不能形成可见光。
发光的复合量相对于非发光复合量的比例越大,光量子效率越高。
由于复合是在少子扩散区内发光的,所以光仅在靠近PN结面数μm以内产生。
原理图如下:发光二极管的工作原理四、步骤:1、按图1-2配置接线,接线注意+、-极性。
2、检查接线无误后,合上主机箱电源开关。
3、调节主机箱中的恒流源电流大小即发光二管的工作电流大小就可改变光源的光照度值。
拔去发光二极管的其中一根连线头,则光照度为0(因恒流源的起始电流不为0,要得到0照度只能断开光源的一根线)。
按表1进行标定实验(调节恒流源),得到照度—电流对应值。
图1—2 工作电流与光照度的关系图1—3 工作电压与光照度的关系5合上主机箱电源,调节主机箱中的0~24V可调电压(电压表量程20V档),就可以改变光源(发光二极管)的光照度值。
按表7-1进行标定实验(调节电压源),得到照度~电压对应值。
6、根据表1画出发光二极管的电流~照度、电压~照度特性曲线。
东南大学传感器实验报告
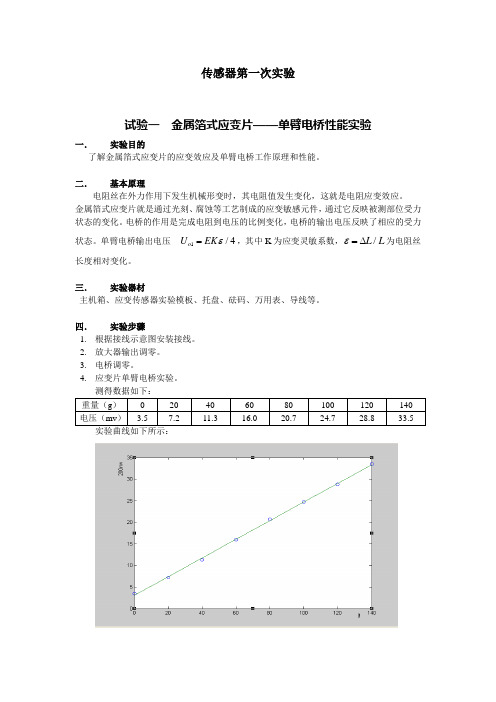
传感器第一次实验试验一 金属箔式应变片——单臂电桥性能实验一. 实验目的了解金属箔式应变片的应变效应及单臂电桥工作原理和性能。
二. 基本原理电阻丝在外力作用下发生机械形变时,其电阻值发生变化,这就是电阻应变效应。
金属箔式应变片就是通过光刻、腐蚀等工艺制成的应变敏感元件,通过它反映被测部位受力状态的变化。
电桥的作用是完成电阻到电压的比例变化,电桥的输出电压反映了相应的受力状态。
单臂电桥输出电压 1/4o U EK ε=,其中K 为应变灵敏系数,/L L ε=∆为电阻丝长度相对变化。
三. 实验器材主机箱、应变传感器实验模板、托盘、砝码、万用表、导线等。
四. 实验步骤1. 根据接线示意图安装接线。
2. 放大器输出调零。
3. 电桥调零。
4. 应变片单臂电桥实验。
测得数据如下:实验曲线如下所示:分析:由图可以看出,输出电压与加载的重量成线性关系,由于一开始调零不好,致使曲线没有经过原点,往上偏离了一段距离。
5. 根据表中数据计算系统的灵敏度/S U W =∆∆(U ∆为输出电压变化量,W ∆为重量变化量)和非线性误差/100%m yFS δ=∆⨯,式中m ∆为输出值(多次测量时为平均值)与拟合直线的最大偏差;yFS 为满量程输出平均值,此处为140g 。
U ∆=30mv , W ∆=140g ,所以 30/1400.2143S m v g ==m ∆=1.9768g , y F S =140g ,所以 1.9768/140100% 1.δ=⨯=6. 利用虚拟仪器进行测量。
五. 思考题单臂电桥工作时,作为桥臂电阻的应变片应选用:(1)正(受拉)应变片;(2)负(受压)应变片;(3)正、负应变片均可以。
答:应变片受拉,所以选(1)正应变片。
实验二 金属箔片应变片——板桥性能实验一、实验目的比较半桥与单臂电桥的不同性能、了解其特点二.基本原理不同受力方向的两只应变片接入电桥作为邻边,电桥暑促灵敏度提高,非线性得到改善。
检测技术实验报告 东南大学
东南大学自动化学院实验报告课程名称:检测技术第 2 次实验实验名称:院(系):专业:姓名:学号:实验室:实验组别:同组人员:实验时间:年11 月23 日评定成绩:审阅教师:实验十二电涡流传感器位移实验一、基本原理通过交变电流的线圈产生交变磁场,当金属体处在交变磁场时,根据电磁感应原理,金属体内产生电流,该电流在金属体内自行闭合,并呈旋涡状,故称为涡流。
涡流的大小与金属导体的电阻率、导磁率、厚度、线圈激磁电流频率及线圈与金属体表面的距离x等参数有关。
电涡流的产生必然要消耗一部分磁场能量,从而改变激磁线线圈阻抗,涡流传感器就是基于这种涡流效应制成的。
电涡流工作在非接触状态(线圈与金属体表面不接触),当线圈与金属体表面的距离x以外的所有参数一定时可以进行位移测量。
二、实验器材主机箱、电涡流传感器实验模板、电涡流传感器、测微头、被测体(铁圆片)。
三、实验步骤1、观察传感器结构,这是一个平绕线圈。
根据图安装测微头、被测体、电涡流传感器并接线。
2、调节测微头使被测体与传感器端部接触,将电压表显示选择开关切换到20V 档,检查接线无误后开启主机箱电源开关,记下电压表读数,然后每隔0.1mm 读一个数,直到输出几乎不变为止。
将数据列入表。
由曲线拟合易知测量范围为1mm 时最大偏差max 22.4m V v =∆所以有max max .122.4100%100%100% 3.7%(x x )5901F Sn V V X k γ∆∆=⨯=⨯=⨯=-⨯由于测量时的失误,仅能算出测量范围为1.5mm 时最大偏差max 31.0V mv ∆=所以有max max .131.0100%100%100% 3.50%(x x )590 1.5F Sn V V X k γ∆∆=⨯=⨯=⨯=-⨯四、思考题1、电涡流传感器的量程与哪些因素有关,如果需要测量±5mm 的量程应如何设计传感器? 一般来说金属导体的电阻率c ,厚度t ,线圈的励磁电流角频率ω以及线圈与金属块之间的距离x 等参数会影响传感器的量程。
东南大学测试与控制技术项目设计报告

Mechanical MeasurementsSound acquisition and shaft vibrationanalysis学号学生姓名指导教师课程:机械工程测试与控制技术Ⅱ时间:2015 年 6 月 19日摘要:本项目设计围绕课程讲授的动态信号的采集、分析与处理的基本原理与方法进行,主要是信号仿真、采集与分析处理。
运用信号的分析与处理等测试技术相关知识,借助Matlab 软件,利用傅里叶变换等手段,对采集信号进行数学处理并做时域和频域分析,了解不同信号的特征:1)根据谱图辨别不同人的声音 2)分析零件的故障关键词:信号;频谱分析;声音;轴承故障Abstract:This project design around the course teaching of dynamic signal acquisition, analysis and processing, the basic principle and method of mainly signal simulation, acquisition and analysis. Testing technology such as the use of signal analysis and processing related knowledge, with the aid of Matlab software, utilizing the means such as Fourier transform, the collected signal mathematical processing and time domain and frequency domain analysis, understand the characteristics of the different signal: 1) according to different voice spectrum diagram to identify 2) analysis of parts failureKey words:Signal; Spectrum Analysis; V oice; Bearing fault1.引言测试是具有试验性质的测量,可以理解为测量与试验的综合。
东南大学压缩机性能测试实验

压缩机性能测试实验一、 实验目的1. 通过本实验,熟悉和了解制冷压缩机的测试工况和测试方法,增强对制冷压缩机的认识;2. 学习本实验中所涉及的各种参数的测量方法,掌握制冷压缩机性能的热力计算;3. 熟悉对制冷压缩机性能实验系统软件的操作。
二、 实验原理制冷压缩机的性能随蒸发温度和冷凝温度的变化而变化,因此需要在国家标准规定的工况下进行制冷压缩机的性能测试。
压缩机的性能可由其工作工况的性能系数COP 来衡量:0Q COP W= 式中,0Q 为压缩机的制冷量;W 为压缩机输入功率。
在一个确定的工况下,蒸发温度、冷凝温度、吸气温度以及过冷度都是已知的。
这样,对于单级蒸气压缩式制冷机来说,其循环p-h 图如图1 所示。
图1图中,1点为压缩机吸气状态;4-5为过冷段。
在特定工况下,压缩机的单位质量制冷量是确定的,即:015q h h =- 。
这样只要测得流经压缩机的制冷剂质量流量m G ,就可计算出压缩机的制冷量,即0015()m m Q G q G h h =⨯=⨯-压缩机的输入功率:开启式压缩机为输入压缩机的轴功率,封闭式(包括半封闭式和全封闭式)压缩机为电动机输入功率。
三、 实验设备整个实验装置由被测压缩机、制冷系统、采集系统和测量系统共四部分组分。
其实验原理图如图2 所示:图2四、实验方法为了确保实验系统运行在一个特定的工况下,实验中通过控制吸气压力、排气压力和吸气温度这三个量稳定在设定值附近。
这三个参数允许的偏差范围按如下规定:排气压力用冷却水进口温度T7通过恒温器1控制,吸气压力用电子膨胀阀控制,吸气温度用载冷剂进口温度T9通过恒温器2控制。
压缩机性能实验要包括主要试验和校核试验,二者应同时进行测量。
校核试±以内,并以主要试验的测量结果验和主要试验的试验结果之间的偏差应在4%为计算依据。
本次实验中的主要试验是通过测量冷凝器的换热量,从而根据冷凝器热平衡关系计算出流经压缩机的制冷剂流量,并由此流量计算出压缩机制冷量,为主测制冷量。
东南大学实验报告

东南大学实验报告实验目的本次实验旨在测试不同温度下材料的热导率。
实验材料和仪器设备1. 实验材料:铝、铜、钢、玻璃纤维2. 仪器设备:温度计、热导率测量仪实验原理热导率是材料传导热量的能力,是指导热物质单位体积的热量通过单位厚度的材料传播,在单位时间内,由单位温度差引起的热流量。
热导率的数值越大,材料传热的能力越强。
实验步骤1. 将铝、铜、钢和玻璃纤维样品按照规定尺寸准备好。
2. 使用温度计测量实验室环境的温度,并记录下来。
3. 打开热导率测量仪,将温度计的探头插入仪器中的温度测量接口。
4. 将铝样品放在仪器的测试区域中,并设置所需的温度。
5. 等待样品温度稳定后,记录下当前的温度。
6. 同样的方法,对铜、钢和玻璃纤维样品进行测试。
7. 实验结束后,关闭热导率测量仪,记录实验结束时的室温。
实验数据记录与分析实验测得的温度数据以及相应的材料热导率如下表所示:材料温度() 热导率(W/m·K)::: :铝20 205铜20 398钢20 46玻璃纤维20 0.04通过对实验数据的分析,可以得出以下结论:1. 铜的热导率远高于其他材料,表明铜材料具有良好的导热性能。
2. 铝的热导率排名第二,热导率明显高于钢和玻璃纤维。
3. 钢的热导率最低,远远低于铝和铜。
4. 玻璃纤维的热导率最低,几乎接近于零,说明其具有较好的隔热性能。
实验结论通过本次实验的数据分析,我们可以得出以下结论:1. 铝和铜是良好的导热材料,具有较高的热导率。
2. 钢的导热性能较差,热导率远低于铝和铜。
3. 玻璃纤维是一种良好的隔热材料,热导率接近于零。
实验总结本次实验通过测量不同材料的热导率,以及对实验数据的分析,我们对不同材料的传热能力有了更深入的了解。
不同材料的热导率差异很大,可以根据具体需求选择合适的材料。
这对于热工工程、建筑材料等领域具有重要意义。
同时,在实验过程中,我们也掌握了使用温度计和热导率测量仪的方法,提高了实验操作能力。
东南大学实验四系统频率特性的检验测试实验报告

东南大学自动控制实验室实验报告课程名称:自动控制原理实验实验名称:实验四系统频率特性的测试院(系):自动化专业:自动化姓名:学号:实验室:417 实验组别:同组人员:实验时间:2016年12月02日评定成绩:审阅教师:目录一.实验目的 (3)二.实验原理 (3)三. 实验设备 (3)四.实验线路图 (4)五、实验步骤 (4)六、实验数据 (5)七、报告要求 (6)八、预习与回答 (10)九、实验小结 (10)一、实验目的(1)明确测量幅频和相频特性曲线的意义(2)掌握幅频曲线和相频特性曲线的测量方法(3)利用幅频曲线求出系统的传递函数二、实验原理在设计控制系统时,首先要建立系统的数学模型,而建立系统的数学模型是控制系统设计的前提和难点。
建模一般有机理建模和辨识建模两种方法。
机理建模就是根据系统的物理关系式,推导出系统的数学模型。
辨识建模主要是人工或计算机通过实验来建立系统数学模型。
两种方法在实际的控制系统设计中,常常是互补运用的。
辨识建模又有多种方法。
本实验采用开环频率特性测试方法,确定系统传递函数,俗称频域法。
还有时域法等。
准确的系统建模是很困难的,要用反复多次,模型还不一定建准。
模型只取主要部分,而不是全部参数。
另外,利用系统的频率特性可用来分析和设计控制系统,用Bode图设计控制系统就是其中一种。
(ω),测幅频特性幅频特性就是输出幅度随频率的变化与输入幅度之比,即A(ω)=U oU i时,改变正弦信号源的频率测出输入信号的幅值或峰峰值和输输出信号的幅值或峰峰值。
测相频有两种方法:(1)双踪信号比较法:将正弦信号接系统输入端,同时用双踪示波器的Y1和Y2测量系统的输入端和输出端两个正弦波,示波器触发正确的话,可看到两个不同相位的正弦波,×360°。
这种方法直观,容易理解。
测出波形的周期T和相位差Δt,则相位差∅=∆tT就模拟示波器而言,这种方法用于高频信号测量比较合适。
(2)李沙育图形法:将系统输入端的正弦信号接示波器的X轴输入,将系统输出端的正弦信号接示波器的Y轴输入,两个正弦波将合成一个椭圆。
东南大学系统实验(DSP)实验报告

系统实验(DSP)实验报告一、 实验题目⑴ 图像的锐化处理(高通滤波处理)处理模板如下:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--+--=004100αααααM 25.0=α 对应数学表达式:()[])1,(),1()1,(),1(),(41),(++++-+--+=y x f y x f y x f y x f y x f y x g αα⑵ 图像的边缘检测方向方向和y x 的梯度分别为:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=∆10110110131xf ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=∆11100011131y f 总梯度幅度yx f f f ∆+∆=∆[,1(),1()1,1()1,1(),1()1,1(||31-------+++++-+=∆yx f y x f y x f y x f y x f y x f fx[,1()1,()1,1()1,1()1,()1,1(||31+-+-+---++-+--=∆yx f y x f y x f y x f y x f y x f f y⎩⎨⎧≥∆=elseT f ify x g 01),(二、 实验原理为了更加通俗地描述图像处理方法,这里引入模板的概念。
模板就是一个矩阵,模板大小通常为2⨯2、3⨯3,模板也好比一个窗口,将模板窗口覆盖在图像上,窗口覆盖到的象素就是将要处理的象素,而象素所对应的模板矩阵元素的值就是加权值,模板运算就是将模板矩阵元素与对应的象素值相乘并求和。
如下图所示,模板为3⨯3大小,对应到图像上窗口亦为3⨯3大小,窗口中有九个象素与模板相对应。
模板第一行11m 与)1,1(--y x f 、12m 与)1,(-y x f 、13m 与图像模板示意图)1,1(-+y x f 相对应,模板第二、三行依此类推。
根据模板运行规则,3⨯3模板对应的表达式数学为:)1,1()1,()1,1(),1(),(),1()1,1()1,()1,1(),(333231232221131211++⋅++⋅++-⋅++⋅+⋅+-⋅+-+⋅+-⋅+--⋅=y x f m y x f m y x f m y x f m y x f m y x f m y x f m y x f m y x f m y x g⑴、图像的锐化处理锐化式可以用模板表示为:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--+--=004100αααααM 对应的数学表达式是:()[])1,(),1()1,(),1(),(41),(++++-+--+=y x f y x f y x f y x f y x f y x g αα⑵、图像的边界检测边界特点:沿边界走向特性变化比较缓慢,垂直于边界走向特性变化比较剧烈。
东南大学传感器实验报告

传感器实验实验一 金属箔式应变片——单臂电桥性能实验一. 实验目的了解金属箔式应变片的应变效应与单臂电桥工作原理和性能。
二. 基本原理电阻丝在外力作用下发生机械形变时,其电阻值发生变化,这就是电阻应变效应。
金属箔式应变片就是通过光刻、腐蚀等工艺制成的应变敏感元件,通过它反映被测部位受力状态的变化。
电桥的作用是完成电阻到电压的比例变化,电桥的输出电压反映了相应的受力状态。
单臂电桥输出电压 1/4o U EK ε=,其中K 为应变灵敏系数,/L L ε=∆为电阻丝长度相对变化。
三. 实验器材主机箱、应变传感器实验模板、托盘、砝码、万用表、导线等。
四. 实验步骤1. 根据接线示意图安装接线。
2. 放大器输出调零。
3. 电桥调零。
4. 应变片单臂电桥实验。
测得数据如下: 重量(g ) 0 20 40 60 80 100 120 140 电压(mv )35101317212529实验曲线如下所示:分析:由图可以看出,输出电压与加载的重量成线性关系,由于一开始调零不好,致使曲线没有经过原点,往上偏离了一段距离。
5. 根据表中数据计算系统的灵敏度/S U W =∆∆(U ∆为输出电压变化量,W ∆为重量变化量)和非线性误差/100%m yFS δ=∆⨯,式中m ∆为输出值(多次测量时为平均值)与拟合直线的最大偏差;yFS 为满量程输出平均值,此处为140g 。
U ∆=30mv , W ∆=140g ,所以 30/1400.2143/S mv g ==m ∆=1.9768g , yFS =140g ,所以 1.9768/140100% 1.41%δ=⨯=6. 利用虚拟仪器进行测量。
测得数据如下表所示: 重量(g ) 0 20 40 60 80 100 120 140 电压(mv )0.75.09.513.918.723.428.332.9相应的曲线如下:五. 思考题单臂电桥工作时,作为桥臂电阻的应变片应选用:(1)正(受拉)应变片;(2)负(受压)应变片;(3)正、负应变片均可以。
东南大学测试与控制技术项目设计报告
Mechanical MeasurementsSound acquisition and shaft vibrationanalysis学号学生姓名指导教师课程:机械工程测试与控制技术Ⅱ时间:2015 年 6 月 19日摘要:本项目设计围绕课程讲授的动态信号的采集、分析与处理的基本原理与方法进行,主要是信号仿真、采集与分析处理。
运用信号的分析与处理等测试技术相关知识,借助Matlab 软件,利用傅里叶变换等手段,对采集信号进行数学处理并做时域和频域分析,了解不同信号的特征:1)根据谱图辨别不同人的声音 2)分析零件的故障关键词:信号;频谱分析;声音;轴承故障Abstract:This project design around the course teaching of dynamic signal acquisition, analysis and processing, the basic principle and method of mainly signal simulation, acquisition and analysis. Testing technology such as the use of signal analysis and processing related knowledge, with the aid of Matlab software, utilizing the means such as Fourier transform, the collected signal mathematical processing and time domain and frequency domain analysis, understand the characteristics of the different signal: 1) according to different voice spectrum diagram to identify 2) analysis of parts failureKey words:Signal; Spectrum Analysis; V oice; Bearing fault1.引言测试是具有试验性质的测量,可以理解为测量与试验的综合。
东南大学土力学实训报告2

目录实验一、密度试验 (2)实验二、土的颗粒级配测定实验 (4)实验三、含水量试验 (7)实验四、认知岩石风化及边坡防护 (10)实验五、土的液塑限测定.................. (12)实验一、密度试验(一)、概述土的密度是指土的单位体积质量,是土的基本物理性质指标之一,其单位为g/cm3。
土的密度反映了土体结构的松紧程度,是计算土的自重应力、干密度、孔隙比、孔隙度等指标的重要依据,也是挡土墙压力计算、土坡稳定性验算、地基承载力和沉降量估算以及路基路面施工填土压实度控制的重要指标之一。
(二)、试验方法及原理密度试验方法有环刀法、蜡封法、灌水法和灌砂法等。
对于细粒土,宜采用环刀法;对于易碎裂、难以切削的土,可用蜡封法;对于现场粗粒土,可用灌水法或灌砂法。
环刀法就是采用一定体积环刀切取土样并称土质量的方法,环刀内土的质量与环刀体积之比即为土的密度。
环刀法操作简便且准确,在室内和野外均普遍采用,但环刀法只适用于测定不含砾石颗粒的细粒土的密度。
1、仪器设备(1)恒质量环刀,内径6.18cm(面积30cm 2)或内径7.98cm (面积50cm 2),高20mm ,壁厚1.5mm ;(2)称量500g 、最小分度值0.1g 的天平;(3)切土刀、钢丝锯、毛玻璃和圆玻璃片等。
2、操作步骤(1)按工程需要取原状土或人工制备所需要求的扰动土样,其直径和高度应大于环刀的尺寸,整平两端放在玻璃板上。
(2)在环刀内壁涂一薄层凡士林,将环刀的刀刃向下放在土样上面,然后用手将环刀垂直下压,边压边削,至土样上端伸出环刀为止,根据试样的软硬程度,采用钢丝锯或修土刀将两端余土削去修平,并及时在两端盖上圆玻璃片,以免水分蒸发。
(3)擦净环刀外壁,拿去圆玻璃片,然后称取环刀加土质量,准确至0.1g 。
3、成果整理按式下式分别计算湿密度和干密度:式中 —湿密度(g/cm 3),精确至0.01g/cm 3; —湿土质量(g );—环刀加湿土质量(g );—环刀质量(g );—环刀容积(cm 3)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
东南大学自动化学院
实验报告
课程名称:检测技术_______________________
第2次实验
实验名称: ______________________________________________
院(系人 ____________ 专业:___________
姓名: _____________ 学号:_______________
实验室: ___________________ 实验组别:___________________ 同组人员: ________ 实验时间:年11月23日
评定成绩: _________________ 审阅教师:__________________
实验十二电涡流传感器位移实验
一、基木原理
通过交变电流的线圈产生交变磁场,当金属体处在交变磁场时,根据电磁感应原理.金属体内产生电流,该电流在金属体内自行闭合,并呈旋涡状,故称为涡流。
涡流的大小与金属导体的电阻率、导磁率、厚度、线圈激磁电流频率及线圈与金属体表而的距离X等参数有关。
电涡流的产生必然要消耗一部分磁场能量,从而改变激磁线线圈阻抗,涡流传感器就是基于这种涡流效应制成的。
电涡流工作在非接触状态(线圈与金属体表而不接触),当线圈与金属体表面的距离X以外的所有参数一泄时可以进行位移测量。
二、实验器材
主机箱、电涡流传感器实验模板、电涡流传感器、测微头、被测体(铁圆片)°
三、实验步骤
1、观察传感器结构,这是一个平绕线圈。
根据图安装测微头、被测体、电涡流传感器并接线。
2.调节测微头使被测体与传感器端部接触,将电压表显示选择开关切换到20V档,检查接线无误后开启主机箱电源开关,记下电压表读数,然后每隔0.1mm读一个数,直到输出几乎不变为止。
将数据列入表。
3、亟出V—X曲线,根据曲线找出线性区域及进行正、负位移测量时的最佳工作点(即曲线线性段的小点)。
试计算测量范围为linm与3 mm时的灵敏度和线性度(可以用端呈法或其它拟合直线)O实验完毕.关闭电源。
变化部分的拟合曲线为:
V=0. 590*X-2. 692 单位转换之后
V=590*X-2692
由图可知最住丄作点为8mm
根据拟合曲线知灵敏度为590 mV/nun
由端基法的拟合直线线性度的公式为:
曲竺1x100% =卫也一X100% 可知:
$$ 饥X”-Xj
x 100% = x 100%
饥x”-xj
由曲线拟合易知测量范弗I为1mm时最大偏差4«瘁| = 22.4mv
所以有
/ = I X100% = -l A—I X100% = - X100% = 3.7%
X FS狀x 厂xj 590x1
由于测量时的失误,仅能算岀测量范囤为1. 5mm时最大偏差|AV m| = 31.0wv
所以有
|^nax|xl00% = _|A1^m| xlQQ% = . 3 1 0X100% = 3.50%
z=
X ” $k(x厂xj590x1.5
四、思考题
1、电涡流传感器的量程与哪些因素有关,如果需要测量±5mm的量程应如何设讣传感器?一般来说金属导体的电阻率c,厚度t,线圈的励磁电流角频率3以及线圈与金属块之间的距离x等参数会影响传感器的量程。
2、用电涡流传感器进行非接触位移测量时,如何根据量程使用选用传感器。
可以通过贴金属片等
方式进行测量
实验十五直流激励时线性霍尔传感器的位移特性实验
一、基本原理
根据霍尔效应,霍尔电势UH=KH・IB,当霍尔元件处在梯度磁场中运动时,它的电势会发生变化,利用这一性质可以进行位移测量。
二、实验器材
主机箱、霍尔传感器实验模板、霍尔传感器、测微头。
三、实验步骤
1、按图示意图接线(实验模板的输出Vol接主机箱电压表的Vin),将主机箱上的电压表量程(显示选择)开关打到2v档。
2、 检查接线无误后,开启电源,调节测微头使霍尔片处在两磁钢的中间位宜.再调节 Rwl
使数显表指示为零。
3、 向某个方向调肖测微头2mm 位移,记录电压表读数作为实验起始点:再反方向调节测
微头,每增加0.2mm 记下一个读数(建议做4mm 位移),将读数填入表中 起始位置为5mm
X(mm) 12 12.2 12.4 12.6 12.8 13.0 13.2 13.4 13.6 13.8 V(v) 1.322 1.393 1.444 1. 490 1.528 1.568 1.602 1.639 1.678 1.715
14.0 8 7.8 7.6 7.4 7.2 7.0 6.8 6.6 6.4 6.2 1.75 3 -1. 38 7 -1. 49 7 -1. 58 0 -1.64 1
-1.69
3
-1.73 3
-1.77 1
-1.81 3
-1.85 2
-1.88 9
作出V —X 曲线,讣算不同测量范国时的灵敏度和非线性误差。
实验完毕,关闭电源。
O
霍尔传感器实验模板
拟合曲线为:
V=0.5367+X-5. 456
单位归一之后:
V=536. 7*X-5456
根据拟合曲线知灵敏度为S = AV/zVC = 536.7(mv/ mm)
对于非线性误差,由拟合曲线知,最大偏差为:|AV;m| = 337.6mv
▲ a a r A
所以:J = —xlOO% = -------------- -------------- x 100% = 10.8%
yFS(12-6.2)x536.7
四、思考题
本实验中霍尔元件位移的线性度实际上反映的是什么量的变化?
由霍尔传感器的工作原理U二KIB知,霍尔元件实际感应的是所在位豊的磁场强度B的大小。
实验中,霍尔元件的线性实际上反映了空间磁场的线性分布,揭示了元件测量处磁场的线性分布。
实验十六交流激励时霍尔式传感器的位移实验
一、基本原理
交流激励时霍尔式传感器与直流激励一样,基本工作原理相同,不同之处是测疑电路。
二、实验器材
主机箱、测微头、霍尔传感器、霍尔传感器实验模板.移相器/相敏检波器/低通滤波 器模板、双线示波器。
三. 实验步骤
2、 首先检查接线无误后,合上主机箱总电源开关。
调节主机箱音频振动器的频率和幅 度旋钮,用示波器、频率表监测Lv 输岀频率为IKHz 、峰峰值为4V 的信号。
关闭主机箱电源, 将Lv 输出信号作为传感器的激励电压接入图的实验模板中。
(注意:Lv 电压峰U 巾值为4V, 幅值过大
会烧坏传感器)
3、 合上主机箱电源,调节测微头使霍尔传感器的霍尔片处于两磁钢中点。
先用示波器 观察使霍尔元件不等位电势为最小,然后观察数显表显示,调卩电位器Rwl 、Rw2使显示 为零。
4、 调节测微头使霍尔传感器产生一个较大位移,利用示波器观察相敏检波器输岀,旋 转移相器单元电位器Rw 和相敏检波器单元电位器Rw,使示波器显示全波整流波形,并观 察数显表显示值。
直至数显表显示为零,此点作为测量原点。
然后旋动测微头,每转动0.2mm, 记下读数,填
入表中
起始位宜为5mm 处,先右移到7mm 处,然后依次左移到3mm 处
X(mm) 10. 63 10. 83 11.03 11.23 11.43 11.63 11.83 12. 03 12. 23 12.43 V (mv) -3.0
98.6
199
293
392
485
565
623
663
698
5、根据表作出V 〜X 曲线,计算不同量程时的非线性误差。
实验完毕,关闭电源。
黴主机
移相器
O RW
1、实验模板接线见图(注意:暂时不要将主机箱中的音频振荡骼Lv 接入实验模板)
+16V
2
霍尔传感器实验模板
/相敏检波器
Vo
AC DC
低通滤波器
L 接示波器 v
1 7
2^
丄
q
] 接主机?3^15V
:</ 4
:-13v
+15v
樓主tn 腐咅癡Lu
IKHz 诈于=4$
O
Vo
JI
拟合曲线为:
V=402.69xX-4241.7
根据拟合曲线知灵敏度为 5 = AV/AX= 402.69(mv/ mm)
对于非线性误差,由拟合曲线知,最大偏差为:|AV ux |= 65.7367mv
65.7367 (12.43-10.63)x402.67
所以:J = ^xl00% =
x 100% =9.06%。