温度检测与控制实验系统设计
(完整版)温度控制系统设计

温度控制系统设计目录第一章系统方案论证 (3)1.1总体方案设计 (3)1.2温度传感系统 (3)1.3温度控制系统及系统电源 (4)1.4单片机处理系统(包括数字部分)及温控箱设计 (4)1.5PID 算法原理 (5)第二章重要电路设计 (7)2.1温度采集 (7)2.2温度控制 (7)第三章软件流程 (8)3.1基本控制 (8)3.2PID 控制 (9)3.3时间最优的 PID 控制流程图 (10)第四章系统功能及使用方法 (11)4.1温度控制系统的功能 (11)4.2温度控制系统的使用方法 (11)第五章系统测试及结果分析 (11)5.1 硬件测试 (11)5.2软件调试 (12)第六章进一步讨论 (12)参考文献 (13)致谢........................................... 错误 !未定义书签。
摘要:本文介绍了以单片机为核心的温度控制器的设计,文章结合课题《温度控制系统》,从硬件和软件设计两方面做了较为详尽的阐述。
关键词:温度控制系统PID 控制单片机Abstract: This paper introduces a temperature control system that is based on the single-chip microcomputer.The hard ware compositionand software design are descried indetail combined with the projectComtrol System of Temperature.PID control Keywords: Control system of temperatureSingle-chip Microcomputer引言:温度控制是工业生产过程中经常遇到的过程控制,有些工艺过程对其温度的控制效果直接影响着产品的质量,因而设计一种较为理想的温度控制系统是非常有价值的。
温度检测系统设计报告模板
温度检测系统设计报告模板1. 引言温度检测是现代社会中广泛应用于各个领域的一项重要技术。
不论是工业生产中的温控系统,还是医疗领域中的体温监测,都需要可靠准确的温度检测系统来提供数据支持。
本报告旨在介绍一种基于传感器技术的温度检测系统的设计方案。
2. 系统设计2.1 系统概述本温度检测系统主要由以下几个部分组成:- 传感器模块- 数据采集模块- 数据处理模块- 数据显示模块2.2 传感器模块传感器模块是温度检测系统的核心部分,用于实时感知周围的温度信息。
常见的温度传感器有热电偶、热敏电阻和半导体温度传感器等。
在本设计方案中,我们选择了半导体温度传感器作为主要传感器。
2.3 数据采集模块数据采集模块用于将传感器模块采集到的温度数据进行模拟转数字(A/D)转换,并将其转化为计算机可读的数据传输格式,如数字信号或模拟信号。
常用的数据采集芯片有MAX31855 和ADS1115 等。
2.4 数据处理模块数据处理模块接收从数据采集模块传输过来的温度数据,并进行必要的数据处理和分析。
其中包括常见的数据滤波、校准和温度单位转换等操作。
此外,如果需要实现更复杂的功能,如报警、数据存储等,也可在该模块进行相应的逻辑设计。
2.5 数据显示模块数据显示模块将处理后的温度数据以直观的方式进行展示,供用户实时监测和观察。
常见的数据显示方式包括数码管、液晶屏、计算机图形界面等。
3. 系统实现3.1 硬件实现在硬件实现方面,我们选用了Arduino 控制板作为主控制器,并通过相关传感器模块和数据采集模块与之连接。
具体连接方式可参考相关文档和示例。
3.2 软件实现在软件实现方面,我们采用了Arduino 的开发环境进行程序编写和上传。
具体程序设计涉及到传感器的读取和校准、数据传输和处理,以及数据显示等方面。
4. 系统测试为了验证系统的性能和准确性,我们进行了一系列的系统测试。
首先对传感器模块进行了静态和动态的温度测试,并与标准温度计进行了对比。
《2024年基于51单片机的温度控制系统设计与实现》范文

《基于51单片机的温度控制系统设计与实现》篇一一、引言在现代工业控制领域,温度控制系统的设计与实现至关重要。
为了满足不同场景下对温度精确控制的需求,本文提出了一种基于51单片机的温度控制系统设计与实现方案。
该系统通过51单片机作为核心控制器,结合温度传感器与执行机构,实现了对环境温度的实时监测与精确控制。
二、系统设计1. 硬件设计本系统以51单片机为核心控制器,其具备成本低、开发简单、性能稳定等优点。
硬件部分主要包括51单片机、温度传感器、执行机构(如加热器、制冷器等)、电源模块等。
其中,温度传感器负责实时监测环境温度,将温度信号转换为电信号;执行机构根据控制器的指令进行工作,以实现对环境温度的调节;电源模块为整个系统提供稳定的供电。
2. 软件设计软件部分主要包括单片机程序与上位机监控软件。
单片机程序负责实时采集温度传感器的数据,根据设定的温度阈值,输出控制信号给执行机构,以实现对环境温度的精确控制。
上位机监控软件则负责与单片机进行通信,实时显示环境温度及控制状态,方便用户进行监控与操作。
三、系统实现1. 硬件连接将温度传感器、执行机构等硬件设备与51单片机进行连接。
具体连接方式根据硬件设备的接口类型而定,一般采用串口、并口或GPIO口进行连接。
连接完成后,需进行硬件设备的调试与测试,确保各部分正常工作。
2. 软件编程编写51单片机的程序,实现温度的实时采集、数据处理、控制输出等功能。
程序采用C语言编写,易于阅读与维护。
同时,需编写上位机监控软件,实现与单片机的通信、数据展示、控制指令发送等功能。
3. 系统调试在完成硬件连接与软件编程后,需对整个系统进行调试。
首先,对单片机程序进行调试,确保其能够正确采集温度数据、输出控制信号。
其次,对上位机监控软件进行调试,确保其能够与单片机正常通信、实时显示环境温度及控制状态。
最后,对整个系统进行联调,测试其在实际应用中的性能表现。
四、实验结果与分析通过实验测试,本系统能够实现对环境温度的实时监测与精确控制。
温度测控系统设计

温度测控系统的设计目录一、设计要求,,,,,,,,,,,,2二、设计目的,,,,,,,,,,,,2三、设计的具体实现,,,,,,,,,21、温度控制系统的总体结构,,,,22、系统硬件选择和设计,,,,,,33、系统各部分功能模块介绍,,,,44、系统流程图,,,,,,,,,,75、系统调试,,,,,,,,,,116、程序,,,,,,,,,,,,1―/ J12四、结论与展望,,,,,,,,,,18五、心得体会及建议,,,,,,,,18、°六附录,,,,,,,,,,,,,丨2」J J J J J J J J J J J J J19七、参考文献,,,,,,,,,,,24、设计要求利用ADC080酥用中断式设计一个温度测控系统,在LED数码显示器上显示温度值,并对温度进行测试和控制,当检测温度达到温度上限60 T时开启风扇(即开启电机),低于下限温度30C时关闭风扇,LED 上的显示内容为:XX C (采用十进制显示)。
二、设计目的课程设计是学生理论联系实际,提高实际综合运用能力的一个保障,也是工程师基本训练的重要环节,电子信息工程专业的学生在学完了《微机原理与接口技术》课程后,已经具备了对微机系统进行设计的初步能力。
通过对一个具体微机系统软硬件系统的设计和调试,培养学生运用该课程的理论知识和技术知识解决工程实际问题的能力,学习微机系统的设计方法:学生通过对实验室系统的实验调试,进一步培养和提高科学实验能力,因此,本课程设计为学生提供了一个良好的理论联系实际的机会和场所,有利于为学生树立微机是一个整体系统的概念,同时加强了学生编制和调试程序的能力,进一步培养学生的独立工作能力。
因此,它是教数学计划中必不可少的重要环节。
本课程是电子信息工程专业的必修课。
本设计的目的是以8086微处理器为控制器,将温度传感器输出的小信号经过放大和低通滤波后,送至A/D 转换器;微控制器实时采集、显示温度值(要求以摄氏度显示),同时系统还应可设定、控制温度值,使系统工作在设定温度。
温度监测系统实验报告

一、实验目的1. 熟悉温度监测系统的基本组成和原理。
2. 掌握温度传感器的应用和数据处理方法。
3. 学会搭建简单的温度监测系统,并验证其功能。
二、实验原理温度监测系统主要由温度传感器、数据采集器、控制器、显示屏和报警装置等组成。
温度传感器将温度信号转换为电信号,数据采集器对电信号进行采集和处理,控制器根据设定的温度范围进行控制,显示屏显示温度信息,报警装置在温度超出设定范围时发出警报。
本实验采用DS18B20数字温度传感器,该传感器具有体积小、精度高、抗干扰能力强等特点。
数据采集器采用单片机(如STC89C52)作为核心控制器,通过并行接口读取温度传感器输出的数字信号,并进行相应的处理。
三、实验器材1. DS18B20数字温度传感器2. STC89C52单片机3. LCD显示屏4. 电阻、电容等电子元件5. 电源模块6. 连接线四、实验步骤1. 搭建温度监测系统电路,包括温度传感器、单片机、显示屏、报警装置等。
2. 编写程序,实现以下功能:(1)初始化单片机系统;(2)读取温度传感器数据;(3)将温度数据转换为摄氏度;(4)显示温度数据;(5)判断温度是否超出设定范围,若超出则触发报警。
3. 连接电源,启动系统,观察温度数据变化和报警情况。
五、实验结果与分析1. 系统搭建成功,能够稳定运行,实时显示温度数据。
2. 温度数据转换准确,显示清晰。
3. 当温度超出设定范围时,系统能够及时触发报警。
六、实验总结1. 本实验成功地搭建了一个简单的温度监测系统,实现了温度数据的采集、处理和显示。
2. 通过实验,加深了对温度传感器、单片机、显示屏等电子元件的理解和应用。
3. 实验过程中,学会了如何编写程序,实现温度数据的处理和显示。
七、实验建议1. 在实验过程中,注意电路连接的准确性,避免因连接错误导致实验失败。
2. 在编写程序时,注意代码的简洁性和可读性,便于后续修改和维护。
3. 可以尝试将温度监测系统与其他功能结合,如数据存储、远程传输等,提高系统的实用性和功能。
基于AD590的温度测控系统设计

基于AD590的温度测控系统设计本文介绍了一种适用于实验室条件下实验、研究和二次开发的数字式温度测控装置。
该器件采用新型集成温度传感器AD590作为温度测量元件,并提供两个控制单元进行实验比较。
通过测量和控制恒温器中的温度,获得了令人满意的结果。
1.引言对于导弹武器和设备等大型系统,其性能往往受到外部环境和自身运行条件的影响。
其中,温度的影响往往起着非常重要的作用。
因此,温度检测和控制一直是许多研究者关注的焦点。
然而,一些温度测控装置精度低,温度控制不准确,一些新仪器成本高,难以推广。
特别要指出的是,过去开发的温度测控系统通常是一个独立的系统,一物一用,很难被其他系统采用,存在维护困难、维修不便等问题。
为此,作者根据目前流行的模块化设计原理,开发了一种适用于实验室条件下研发的高精度温度测控装置。
2.工作原理图l为WCZ-98型温度测控装置的电气原理图。
其工作原理为:以AD590为一桥臂的测温电桥采取到的温度信号,经差动放大并进行缓冲隔离后一路送至数显表进行数字化温度显示,另一路与设定值相比较。
比较出来的差值由开关K控制可选择送人两路调节控制器。
其中一路由比较放大器和继电器组成,以此为调节控制器可使该装置形成一个无需与计算机相连的独立的测控温设备;另一路由PID调节器(由A/D、D/A与装有PID调节软件的计算机构成)和可控硅组成。
从调节控制器出来的信号通过控温执行元件实现温度控制。
下面就其中几个部分的原理进行分析。
AD590是美国AD公司生产的专用集成温度传感器,属于电流输出型。
图2所示为AD590在三个不同温度下的电流一电压特性曲线。
在一定温度范围内,它相当于一个高阻电流源,其电流温度灵敏度为lμA/K。
它不易受接触电阻、引线电阻、电压噪声等的干扰。
此外,它还具有体积小、测温精度高、线性好和互换性强等特点,非常适用于远距离测控,同时也适用于本文所要求的模块化、分体式结构的特点。
其主要技术指标为:a.测温范围:一55.150℃;b.电流输出(标定系数):lμA/K;c.电源电压:直流4—30V;d.线性度:在满量程范围内小于±0.5℃;e.重复性:±0.1℃;f.输出阻抗:约为10MQ;g.长期漂移:±0.1℃/月。
温度控制系统的设计与实现
温度控制系统的设计与实现汇报人:2023-12-26•引言•温度控制系统基础知识•温度控制系统设计目录•温度控制系统实现•温度控制系统应用与优化01引言目的和背景研究温度控制系统的设计和实现方法,以满足特定应用场景的需求。
随着工业自动化和智能制造的快速发展,温度控制系统的性能和稳定性对于产品质量、生产效率和能源消耗等方面具有重要影响。
03高效、节能的温度控制系统有助于降低生产成本、减少能源浪费,并提高企业的竞争力。
01温度是工业生产过程中最常见的参数之一,对产品的质量和性能具有关键作用。
02温度控制系统的稳定性、准确性和可靠性直接关系到生产过程的稳定性和产品质量。
温度控制系统的重要性02温度控制系统基础知识温度控制系统的性能指标包括控制精度、响应速度、稳定性和可靠性等,这些指标直接影响着系统的性能和效果。
温度控制原理是利用温度传感器检测当前温度,并将该信号传输到控制器。
控制器根据预设的温度值与实际温度值的差异,通过调节加热元件的功率来控制温度。
温度控制系统通常由温度传感器、控制器和加热元件组成,其中温度传感器负责检测温度,控制器负责控制加热元件的开关和功率,加热元件则是实现温度升高的设备。
温度控制原理温度传感器是温度控制系统中非常重要的组成部分,其工作原理是将温度信号转换为电信号或数字信号,以便控制器能够接收和处理。
常见的温度传感器有热敏电阻、热电偶、集成温度传感器等,它们具有不同的特点和适用范围。
选择合适的温度传感器对于温度控制系统的性能和稳定性至关重要。
温度传感器的工作原理加热元件的工作原理加热元件是温度控制系统中实现温度升高的设备,其工作原理是通过电流或电阻加热产生热量,从而升高环境温度。
常见的加热元件有电热丝、红外线灯等,它们具有不同的特点和适用范围。
选择合适的加热元件对于温度控制系统的性能和安全性至关重要。
控制算法是温度控制系统的核心部分,其作用是根据预设的温度值和实际温度值的差异,计算出加热元件的功率调节量,以实现温度的精确控制。
基于单片机的温度控制系统设计与应用
基于单片机的温度控制系统设计与应用温度控制系统是一种常见的自动控制系统,用于维持设定温度范围内的温度稳定。
本文将介绍基于单片机的温度控制系统的设计与应用。
一、系统设计1.功能需求:(1)温度检测:获取环境温度数据。
(2)温度显示:将检测到的温度数据以数字方式显示。
(3)温度控制:通过控制输出信号,自动调节温度以维持设定温度范围内的稳定温度。
2.硬件设计:(1)单片机:选择适合的单片机,如51系列、AVR系列等,具有较强的计算和控制能力。
(2)温度传感器:选择适当的温度传感器,如DS18B20、LM35等,能够准确检测环境温度。
(3)显示屏:选择适当的数字显示屏,如LCD显示屏、数码管等,用于显示温度数据。
(4)执行机构:根据具体需求选择合适的执行机构,如继电器、风扇等,用于控制温度。
3.软件设计:(1)温度检测:通过单片机采集温度传感器的模拟信号,并通过数字转换获得温度数据。
(2)温度显示:将获取到的温度数据进行处理,通过数字显示屏显示。
(3)温度控制:通过控制执行机构,如继电器等,根据温度数据的变化进行调节,将温度维持在设定范围内。
二、系统应用1.家居温控系统:家庭中的空调、暖气等设备可以通过单片机温度控制系统实现智能控制。
通过温度传感器检测室内温度,并将温度数据显示在数字显示屏上。
通过设定温度阈值,当室内温度超出设定范围时,系统控制空调或暖气进行启停,从而实现室内温度的调节和稳定。
这不仅提高了居住舒适度,还能节约能源。
2.工业过程控制:在工业生产过程中,一些特定的应用需要严格控制温度,以确保产品质量或生产过程的稳定。
通过单片机温度控制系统,可以实时检测并控制生产环境的温度。
当温度超过或低于设定的阈值时,系统可以自动调整控制设备,如加热器、冷却器等,以实现温度的控制和稳定。
3.温室农业:温室农业需要确定性的环境温度来保证作物的生长。
通过单片机温度控制系统,可以监测温室内的温度,并根据预设的温度范围,自动启停加热或降温设备,以维持温室内的稳定温度。
温度测量控制系统的设计与制作实验报告

北京电子科技学院课程设计报告( 2010 – 2011年度第一学期)名称:模拟电子技术课程设计题目:温度测量控制系统的设计与制作学号:学生姓名:指导教师:成绩:日期:2010年11月17日目录一、电子技术课程设计的目的与要求 (3)二、课程设计名称及设计要求 (3)三、总体设计思想 (3)四、系统框图及简要说明 (4)五、单元电路设计(原理、芯片、参数计算等) (4)六、总体电路 (5)七、仿真结果 (8)八、实测结果分析 (9)九、心得体会 (9)附录I:元器件清单 (11)附录II:multisim仿真图 (11)附录III:参考文献 (11)一、电子技术课程设计的目的与要求(一)电子技术课程设计的目的课程设计作为模拟电子技术课程的重要组成部分,目的是使学生进一步理解课程内容,基本掌握电子系统设计和调试的方法,增加集成电路应用知识,培养学生实际动手能力以及分析、解决问题的能力。
按照本专业培养方案要求,在学完专业基础课模拟电子技术课程后,应进行课程设计,其目的是使学生更好地巩固和加深对基础知识的理解,学会设计小型电子系统的方法,独立完成系统设计及调试,增强学生理论联系实际的能力,提高学生电路分析和设计能力。
通过实践教学引导学生在理论指导下有所创新,为专业课的学习和日后工程实践奠定基础。
(二)电子技术课程设计的要求1.教学基本要求要求学生独立完成选题设计,掌握数字系统设计方法;完成系统的组装及调试工作;在课程设计中要注重培养工程质量意识,按要求写出课程设计报告。
教师应事先准备好课程设计任务书、指导学生查阅有关资料,安排适当的时间进行答疑,帮助学生解决课程设计过程中的问题。
2.能力培养要求(1)通过查阅手册和有关文献资料培养学生独立分析和解决实际问题的能力。
(2)通过实际电路方案的分析比较、设计计算、元件选取、安装调试等环节,掌握简单实用电路的分析方法和工程设计方法。
(3)掌握常用仪器设备的使用方法,学会简单的实验调试,提高动手能力。
温度检测系统的设计【文献综述】

毕业论文文献综述机械设计制造及其自动化温度检测系统的设计温度检测与控制在国外研究较早,始于20世纪70年代。
先是采用模拟式的组合仪表,采集现场信息并进行指示、记录和控制。
80年代末出现了分布式控制系统。
目前正开发和研制计算机数据采集控制系统的多因子综合控制系统。
现在世界各国的温度测控技术发展很快,一些国家在实现自动化的基础上正向着完全自动化、无人化的方向发展。
在国内,我国对于温度测控技术的研究较晚,始于20世纪80年代。
我国工程技术人员在吸收发达国家温度测控技术的基础上,才掌握了温度室内微机控制技术,该技术仅限于对温度的单项环境因子的控制。
我国温度测控设施计算机应用,在总体上正从消化吸收、简单应用阶段向实用化、综合性应用阶段过渡和发展。
在技术上,以单片机控制的单参数单回路系统居多,尚无真正意义上的多参数综合控制系统,与发达国家相比,存在较大差距。
我国温度测量控制现状还远远没有达到工厂化的程度,生产实际中仍然有许多问题困扰着我们,存在着装备配套能力差,产业化程度低,环境控制水平落后,软硬件资源不能共享和可靠性差等缺点。
近些年来,一些科学家通过对温度检测研究发现太阳辐射或许是气温变暖主要因素温度检测的设计中,单片机是这个系统的核心部分。
单片微型计算机简称单片机,典型的嵌入式微控制器(Microcontroller Unit),常用英文字母的缩写MCU表示单片机,它最早是被用在工业控制领域。
单片机由芯片内仅有CPU的专用处理器发展而来。
早期的单片机都是8位或4位的。
其中最成功的是INTEL的8031,因为简单可靠而性能不错获得了很大的好评。
此后在8031上发展出了MCS51系列单片机系统。
基于这一系统的单片机系统直到现在还在广泛使用。
随着工业控制领域要求的提高,开始出现了16位单片机,但因为性价比不理想并未得到很广泛的应用。
90年代后随着消费电子产品大发展,单片机技术得到了巨大提高。
随着INTEL i960系列特别是后来的ARM系列的广泛应用,32位单片机迅速取代16位单片机的高端地位,并且进入主流市场。
基于单片机的AD590的温测控系统设计 (1)

1.系统方案的设计1.1系统结构本设计是基于单片机对数字信号的高敏感和可控性、温湿度传感器可以产生模拟信号,和A/D 模拟数字转换芯片的性能,以单片机为核心的一套检测系统,其中包括A/D 转换、单片机、温度检测、湿度检测、显示、系统软件等部分的设计。
图1-1 系统总体框图本设计由信号采集、信号分析和信号处理三个部分组成的。
(1)信号采集 由温度传感器、湿度传感器及多路开关组成; (2)信号分析 由A/D 转换器、单片机基本系统组成; (3)信号处理 由串行口LED 显示器和报警系统等组成。
1.2 系统结构原理图该系统由温度传感器、湿度传感器、8031嵌入式系统、加热设备、加湿设备几部分组成。
结构原理框图如图2-2所示。
]8[通过温度传感器和湿度传感器测量温室内的温湿度经过AD 转换送入8031进行处理,测量结果通过显示电路进行显示。
多路开关 A/D 转换多路开关 湿度检测 显示电路报警电路单片机温度检测图1-2系统结构原理图A L E P 00P 01P 02P 03P 04P 05P 06P 07W RP 20R DI N T 1X T A L 1X T A L 2E A V S SR E S E T V C CT X DR X D P 10P 11P 12P 13P 14A T 89S 52QQDC K 74L S 7420p F 20p F6M H z+5+22u F 1k 200复位按键+5+5D 0D 1D 2D 3D 4D 5D 6D 7S T A R T A L EO E E O C C L KA B CR E F (+)V C CR E F (-)G N DI N 0A D C 08093265741u A 741001u F22K+1247K68K 15K+547KA D 59020K 001u F -12-5温度传感器M O C 3011330+5330100001u F 电炉2201K W10A /500V74L S 16474L S 16474L S 164a b c d e f g ha b c d e f g ha b c d e f g h47K *3+574L S 04I N 4004*23D G 12B蜂鸣器+12图1-3电路图处理器室温测量电路触摸屏A/D 转换器放大滤波电路温度传感电路烤箱双向可控硅控制电路上位机软件2.硬件设计2.1 AD590AD590温度传感器是电流型温度传感器,通过对温度的测量可得到所需要的电流值。
单片机温度控制系统的设计毕业设计论文

单片机温度控制系统的设计毕业设计论文摘要:本文设计了一种基于单片机的温度控制系统,旨在实现对温度的准确测量和控制。
系统采用温度传感器作为温度检测元件,通过单片机对温度进行采样和处理,然后根据预设的温度范围,控制风扇的启停,以达到调节室内温度的目的。
实验结果表明,该系统能够准确地测量温度并进行有效的控制。
关键词:单片机;温度控制系统;温度传感器;风扇1.引言温度控制是一种常见的自动化控制方法,广泛应用于工业、农业、医疗等领域。
温度控制系统通过对温度的测量和调节,实现了对环境温度的精确控制。
单片机作为一种微型计算机,具有体积小、功耗低、可编程性强等优点,被广泛应用于温度控制系统中。
2.系统设计系统由温度传感器、单片机和风扇组成。
温度传感器将实时温度传递给单片机,单片机根据设定的温度范围进行判断,并控制风扇的启停。
3.硬件设计(1)温度传感器选型采用数字温度传感器DS18B20,该传感器具有精度高、体积小、抗干扰能力强等特点。
(2)单片机选型采用AT89C52单片机,该单片机具有较高的性能和稳定性,适合于温度控制应用。
(3)风扇选型根据室内温度控制要求,选用功率适中的风扇,并设计驱动电路。
4.软件设计(1)温度测量通过单片机与温度传感器进行通信,实时获取温度数据,并进行精确测量。
(2)温度控制根据设定的温度范围,单片机判断当前温度是否在合理范围内,如果超出范围,则控制风扇启停,达到温度调节的目的。
5.实验结果通过实验,温度控制系统能够准确地测量室内温度,并根据设定的温度范围进行有效的控制。
系统响应速度快,温度波动范围小,能够满足实际应用需求。
6.结论本文设计了一种基于单片机的温度控制系统,并进行了实验验证。
实验结果表明,该系统能够准确地测量温度并进行有效的控制,具有一定的实用性和应用价值。
未来可以进一步优化系统性能,提高温度控制的精确度和稳定性。
[1]张三.基于单片机的温度控制系统设计[D].大学。
[2]李四.单片机在温度控制中的应用[J].仪器仪表学报。
温度检测与控制实验报告

实验三十二温度传感器温度控制实验一、实验目的1.了解温度传感器电路的工作原理2.了解温度控制的基本原理3.掌握一线总线接口的使用二、实验说明这是一个综合硬件实验,分两大功能:温度的测量和温度的控制。
1.DALLAS最新单线数字温度传感器DS18B20简介Dallas 半导体公司的数字化温度传感器DS1820是世界上第一片支持“一线总线”接口的温度传感器。
现场温度直接以“一线总线”的数字方式传输,大大提高了系统的抗干扰性。
适合于恶劣环境的现场温度测量,如:环境控制、设备或过程控制、测温类消费电子产品等。
与前一代产品不同,新的产品支持3V~5.5V的电压范围,使系统设计更灵活、方便。
DS18B20测量温度范围为 -55°C~+125°C,在-10~+85°C范围内,精度为±0.5°C。
DS18B20可以程序设定9~12位的分辨率,及用户设定的报警温度存储在EEPROM中,掉电后依然保存。
DS18B20内部结构DS18B20内部结构主要由四部分组成:64位光刻ROM、温度传感器、非挥发的温度报警触发器TH和TL、配置寄存器。
DS18B20的管脚排列如下:DQ为数字信号输入/输出端;GND为电源地;VDD为外接供电电源输入端(在寄生电源接线方式时接地)。
光刻ROM中的64位序列号是出厂前被光刻好的,它可以看作是该DS18B20的地址序列码。
64位光刻ROM的排列是:开始8位(28H)是产品类型标号,接着的48位是该DS18B20自身的序列号,最后8位是前面56位的循环冗余校验码(CRC=X8+X5+X4+1)。
光刻ROM的作用是使每一个DS18B20都各不相同,这样就可以实现一根总线上挂接多个DS18B20的目的。
DS18B20中的温度传感器可完成对温度的测量,以12位转化为例:用16位符号扩展的二进制补码读数形式提供,以0.0625℃/LSB形式表达,其中S为符号位。
多点温度检测系统设计

多点温度检测系统设计一、引言随着科技的不断发展,温度检测技术已经广泛应用于各个领域。
在很多实际应用中,需要对不同位置的温度进行实时监测,以保证系统的正常运行或者提供必要的温控信息。
本文将介绍一种多点温度检测系统的设计,该系统可以同时监测多个温度传感器的温度,并将数据传输到中央控制器进行处理和分析。
二、系统设计1.系统框架该多点温度检测系统由多个温度传感器、信号采集模块、数据传输模块和中央控制器组成。
各个组件之间通过有线或者无线方式连接,将温度数据传输到中央控制器。
2.温度传感器温度传感器是整个系统的核心组件,用于实时监测不同位置的温度。
传感器可以选择常见的热电偶、热敏电阻等类型,根据具体需求选择合适的传感器。
3.信号采集模块信号采集模块负责将温度传感器采集到的模拟信号转换为数字信号,以便于处理和传输。
采集模块应具备多通道输入功能,可以同时采集多个传感器的数据。
4.数据传输模块数据传输模块将信号采集模块采集到的数据传输到中央控制器。
传输方式可以选择有线的方式,如RS485、CAN、以太网等,也可以选择无线方式,如蓝牙、Wi-Fi、LoRa等。
5.中央控制器中央控制器负责接收和处理传输过来的温度数据,并进行分析和判断。
可以通过界面显示温度数据,设置温度报警阈值,并在超过阈值时进行报警。
控制器还可以将温度数据存储到数据库中,以便后续分析和查询。
中央控制器还可以与其他系统进行联动,实现温度控制、远程监控等功能。
三、系统实现1.温度传感器的选择和布置根据具体应用场景和需求选择合适的温度传感器,并合理布置在需要监测的位置。
传感器之间距离适当远离干扰源,以确保准确测量温度。
2.信号采集模块的设计设计适合的信号采集模块,能够满足多个传感器数据的采集和处理需求。
采集模块应具备高精度、低功耗和高稳定性的特点。
3.数据传输模块的选择和配置根据具体需求选择合适的数据传输模块,并进行配置。
有线传输模块的配置需要设置通信参数和地址等信息,无线传输模块需要配置网络参数和安全认证等。
基于单片机的智能温度检测控制系统设计
1 概述在人类的生活环境中,温度扮演着极其重要的角色。
温度是工业生产、现代农业乃至人们日常现实生活中经常会需要测量的一个重要物理量,如石油化工、环境控制、食品加工、实验研究、农业大棚等[1]。
温度的检测与控制是工业生产自动控制系统的重要任务之一,因此,各行各业对温度检测系统的便捷性、精确性、智能化要求越来越高。
由此可见,温度的检测和控制是非常重要的。
测量温度需要使用温度传感器,传统的温度传感器是模拟的,如热敏电阻、热电偶等[2]。
热敏电阻采集温度变化的实质是电阻值,所以在实际使用过程中需要额外的辅助器件将其转化为电压信号并且通过调整后送到模拟-数字转化器件(A/D)才能让单片机处理,数字温度传感器的产生解决了这个问题。
本文采用内部集成了A/D 转换器、电路结构简单的数字化温度传感器DS18B20,与单片机技术相结合实现智能温度检测控制系统的设计。
系统只需要占用单片机的一个I/O 口,就能够实现实时温度检测,这使得系统具有很强的扩展性,并且应用前景广泛、实用价值高。
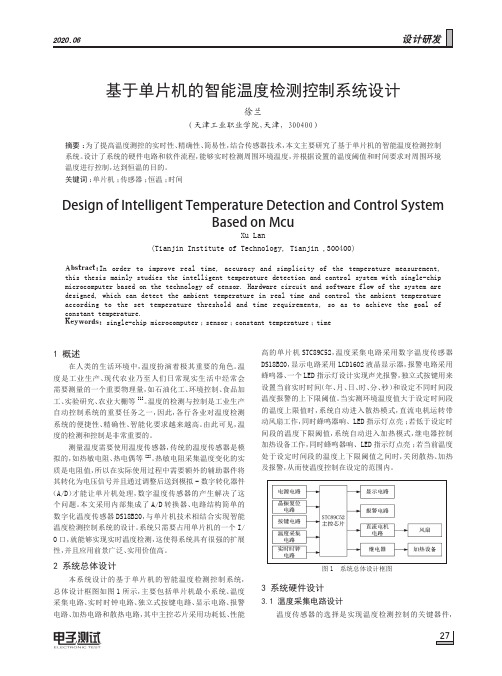
2 系统总体设计本系统设计的基于单片机的智能温度检测控制系统,总体设计框图如图1所示,主要包括单片机最小系统、温度采集电路、实时时钟电路、独立式按键电路、显示电路、报警电路、加热电路和散热电路,其中主控芯片采用功耗低、性能高的单片机STC89C52,温度采集电路采用数字温度传感器DS18B20,显示电路采用LCD1602液晶显示器,报警电路采用蜂鸣器、一个LED 指示灯设计实现声光报警,独立式按键用来设置当前实时时间(年、月、日、时、分、秒)和设定不同时间段温度报警的上下限阈值。
当实测环境温度值大于设定时间段的温度上限值时,系统自动进入散热模式,直流电机运转带动风扇工作,同时蜂鸣器响、LED 指示灯点亮;若低于设定时间段的温度下限阈值,系统自动进入加热模式,继电器控制加热设备工作,同时蜂鸣器响、LED 指示灯点亮;若当前温度处于设定时间段的温度上下限阈值之间时,关闭散热、加热及报警,从而使温度控制在设定的范围内。
基于PLC温度检测与控制系统的设计

目录前言 (1)1 PLC和组态软件基础 (1)1。
1 可编程控制器基础 (1)1.1。
1 可编程控制器的产生和应用 (2)1。
1。
2 可编程控制器的组成和工作原理 (2)1。
1。
3 可编程控制器的分类及特点 (4)1。
2 组态软件的基础 (4)1。
2.1 组态的定义 (4)1。
2.2 组态王软件的特点 (5)1。
2.3 组态王软件仿真的基本方法 (5)2 PLC控制系统的硬件设计 (5)2.1 PLC控制系统设计的基本原则和步骤 (6)2.1。
1 PLC控制系统设计的基本原则 (6)2。
1。
2 PLC控制系统设计的一般步骤 (6)2。
1。
3 PLC程序设计的一般步骤 (7)2.2 PLC的选型和硬件配置 (8)2。
2.1 PLC型号的选择 (8)2。
2。
2 S7-200 CPU的选择 (9)2。
2.3 EM235 模拟量输入/输出模块 (9)2。
2。
4 热电式传感器 (9)2.2.5 可控硅加热装置简介 (10)2。
3 系统整体设计方案和电气连接图 (10)2.4 PLC控制器的设计 (10)2。
4。
1控制系统数学模型的建立 (11)2。
4.2 PID控制及参数整定 (11)3 PLC控制系统的软件设计 (14)3.1 PLC程序设计的方法 (14)3。
2 编程软件STEP7-—Micro/WIN 概述 (14)3。
2。
1 STEP7-—Micro/WIN 简单介绍 (15)3。
2。
2 计算机与PLC的通信 (15)3。
3 程序设计 (15)3。
3.1 程序设计思路 (15)3.3.2 PID指令向导 (16)3.3.3 控制程序及分析 (17)4 组态画面的设计 (18)4。
1 组态变量的建立及设备连接 (18)4.1。
1 新建项目 (18)4。
2 创建组态画面 (19)4.2.1 新建主画面 (19)4。
2。
2 新建PID参数设定窗口 (19)4。
2.3 新建数据表库 (19)4。
2。
4 新建实时曲线 (19)4。
温度采集与控制系统设计毕业论文.doc
第一章绪论本章介绍了温度采集与控制系统设计的背景与意义,通过本章,可以了解温度传感器和单片机的发展状况以及相关技术的发展状况。
1.1 课题背景与意义温度控制无论是在工业生产过程中,还是在日常生活中都起着非常重要的作用,而在当今,我国农村锅炉取暖,农业大棚等多数都没有实时的温度监测和控制系统,还有部分厂矿,企业还一直沿用简单的温度设备和纸质数据记录仪,无法实现温度数据的实时监测与控制。
随着社会经济的高速发展,越来越多的生产部门和生产环节对温度控制精度的可靠性和稳定性等有了更高的要求,传统的温度控制器的控制精度普遍不高,不能满足对温度要求较为苛刻的生产环节。
人们对于温度监测技术的要求日益提高,促进了温度传感器技术的不断发展进步。
温度传感器主要经历了三个发展阶段:模拟集成温度传感器、模拟集成温度控制器、智能温度传感器。
温度传感器的发展趋势:进入21世纪后,温度传感器正朝着高精度、多功能、总线标准化、高可靠性及安全性、开发虚拟传感器和网络传感器、研制单片机测温系统等高科技的方向迅速发展。
自从1976年Intel公司推出第一批单片机以来,80年代的单片机技术进入了快速发展的时期。
近年来,随着大规模集成电路的发展,单片机继续朝着快速,高性能的方向发展,从4位、8位单片机发展到16位、32位单片机。
单片机主要用于控制,它的应用领域遍及各个行业,大到航天飞机,小至日常生活中的冰箱、彩电,单片机都可以大显其能。
单片机在国内的主要的应用领域有三个:第一是家用电器业,例如全自动洗衣机、智能玩具;第二是通讯业,包括手机、电话和BP机等等;第三是仪器仪表和计算机外设制造,例如键盘、收银机、电表等。
除了上述应用领域外,汽车、电子行业在外国也是单片机应用很广泛的一个领域。
它成本低、集成度高、功耗低、控制功能多、能灵活的组装成各种智能控制装置,由它构成的智能仪表解决了长期以来测量仪表中的误差的修正、线性处理等问题。
11.2 本课题的研究内容与目标设计以STC89C52单片机为系统控制核心,结合DS18B20温度传感器、12864液晶显示、BM100无线模块、报警、升温和降温指示灯几部分电路,构成了一整套温度检测,报警及控制系统。
温度检测系统设计报告.(DOC)
计算机硬件(嵌入式)综合实践设计报告温度检测系统设计与制作一.系统概述1. 设计内容本设计主要从硬件和软件部分介绍了单片机温度控制系统的设计思路,简单说明如何实现对温度的控制,并对硬件原理图和程序框图作了简洁的描述。
还介绍了在单片机控制系统的软硬件设计中的一些主要技术关键环节,该系统主要以AT89S52单片机为核心, 同时利用DS18B20温度传感器采集温度,采用4位LED 显示管实施信息显示。
AT89S52单片机设计的温度检测电路是本次设计的主要内容,是整个单片机温度控制系统设计中不可缺少的一部分,该系统对温度进行实时采集与检测。
本设计介绍的单片机自动控制系统的主要内容包括:系统概述、元器件选择、系统理论分析、硬件设计、部分软件设计及主要技术性能参数。
2. 元器件选择单片机AT89S52:1个22uF电容:2个4.7K电阻:1个万能板:1个杜邦线:若干单排排针:若干DS18B20温度传感器:2个4位LED显示管:1个二.软件功能设计及程序代码1.总体系统设计思想框图如下:单片机应用软件调试软件编程系统测试和调试系统集成硬件调试选择单片机芯片定义系统性能指标硬件设计2.主程序流程图3.DS18B20数据采集流程图4.程序代码①、温度记录仪#include<reg52.h>#include<intrins.h>#include<SYSTEM.h>#include<LCD1602.h>#include<18B20.h>#include<EEPROM.h>bit rec_flag=0;//记录温度标志uchar autobac_tim=0;//自动跳转延时uchar code logos[]="****NT MUSIC****"; uchar incmin=0;//计分钟数bit overflag=0;//数据溢出标志位uchar mode=1;//系统运行模式uchar tempmode;//模式缓存void init(){lcd_init();eeprom_init();/***********开机效果****************/ display(l1," Starting NT",1);longdelay(10);display(l2," Ver 3.0.1",1);longdelay(20);write_cmd(0x01);//清屏/*************************************/ sys_init();}void comms() //模式公共进程{time2times(); //时间格式转换avtemp=gettemp();//获取温度avtemp2avtemps();//温度格式转换date_counter();//获取当前日期date2dates();//日期格式转换display(l2+1,times,0);display(l2+11,avtemps,0);}void progs(uint i,uint k)//进度条{uint j;write_cmd(0xc0);for(j=0;j<(i*16/k);j++){write_lcddata(0xff);}}void normal_run() //无记录运行模式{comms();if(time[2]%10<5){display(l1,logos,1);}else{display(l1,"***",0);display(l1+13,"***",0);display(l1+3,dates,0);}incmin=0;}void recding_run() //记录模式运行模式{uint WDTPT;//临时写地址指针变量存放comms();recfrq2recfrqs();if(time[2]%10<5){if(mss>50) display(l1," ",0);elsedisplay(l1,"R",0);display(l1+1,"-NUM",0);display(l1+5,datcounts,0);display(l1+9,"**EV",0);display(l1+13,recfrqs,0);}else{display(l1,"***",0);display(l1+13,"***",0);display(l1+3,dates,0);} /***********定时记录*************/if(incmin>=recfrq)//触发记录功能{incmin=0;//1清除进入记录标志if(WDTP>10240) //20个扇区overflag=1;if(overflag==0)//如果数据尚未溢出{if(date_recf==1)//记录年-月-日(格式:'z'+年+月+日)为十制数值{date_recf=0;//清除记录日期标志write_isp(WDTP,'z');//日期起始标志write_isp(WDTP,date[0]);write_isp(WDTP,date[1]);write_isp(WDTP,date[2]);//记录年、月、日}/***********记录时间************/write_isp(WDTP,time[0]);write_isp(WDTP,time[1]);//记录时分/***********记录温度************/write_isp(WDTP,avtemp/100);write_isp(WDTP,avtemp%100);/**********记录加一*********/datcount++;/**********写回数据指针****************/WDTPT=WDTP;if(FDTP==512){del_isp(0);//清空记录表FDTP=0;}write_isp(FDTP,WDTPT/256);write_isp(WDTP,WDTPT%256);write_isp(WDTP,datcount/256);write_isp(WDTP,datcount%256);FDTP=WDTP;WDTP=WDTPT;//交互完成}if(overflag==1)//如果数据溢出{display(l1,"Error!",1);display(l2,"Data Overflow!",1);autobac_tim=0;while(autobac_tim!=3);display(l2," ",1);}}}void data_run() //查看记录模式{uchar i=0;bit bacf=0;uint cou_t=0;//计数缓存变量uchar temp=0;//临时数据缓存uint cd=0;//进度条统计数据autobac_tim=0;while(bacf==0){if(autobac_tim>10)bacf=1;display(l1,"Ready for Export",1);display(l2,"D-Date T-Temp L!",1);if(RI==1){autobac_tim=0;RI=0;ser_rec=SBUF;switch(ser_rec){case 'L': //格式化display(l1,"Format?",1);display(l2," Y-Yes N-No",1);while(1){if(RI==1) {RI=0;ser_rec=SBUF;autobac_tim=0;}if(ser_rec=='Y')//确定格式化{display(l1,"Formatting...",1);display(l2," ",1);eeprom_format();display(l1,"Format Successed",1);longdelay(3);break;}if(ser_rec=='N') break;if(autobac_tim>10)break;}autobac_tim=0;break;case 'D'://输出日期时间display(l1,"Exporting Date..",1);display(l2," ",1);RDTP=512;//将读指针放到首位cou_t=datcount;cd=0;while(cou_t!=0){if(RI==1) RI=0;if(SBUF=='B'){display(l1,"Export stopped",1);cd=0;longdelay(3);break;}temp=read_isp(RDTP);// 预读判断RDTP--;if(temp=='z'){RDTP++;prf_date();//输出年月日}prf_time(); //输出时间RDTP=RDTP+2;cou_t--;cd++;progs(cd,datcount);}if(datcount==0){display(l1,"No Data!",1);longdelay(3);}autobac_tim=0;break;case 'T'://温度输出display(l1,"Exporting Temp..",1);display(l2," ",1);RDTP=516;//将读指针放到首位cd=0;cou_t=datcount;while(cou_t!=0){if(RI==1) RI=0;if(SBUF=='B'){display(l1,"Export stopped",1);cd=0;longdelay(3);break;}temp=read_isp(RDTP);// 预读判断RDTP--;if(temp=='z'){RDTP=RDTP+6;}else{RDTP=RDTP+2;}prf_temp();cou_t--;cd++;progs(cd,datcount);}if(datcount==0){display(l1,"No Data!",1);longdelay(3);}autobac_tim=0;break;case 'B':bacf=1;break;}ser_rec=0;}}mode=tempmode; display(l2," ",1);}void adj_settings() //设置模式{uchar i=0;//Counterbit endadj=0;//调整完毕标志uchar ser_temp=0;//接收缓存write_cmd(0x01);//清屏times[5]=':';//恢复数点display(l1,"Set time- ",1);display(l1+11,"hour",0);display(l2+11,"[ ]",0);display(l2+1,times,0);display(l2+12,recfrqs,0);write_cmd(0xC1+i);write_cmd(0x0f);//显示闪烁光标autobac_tim=0;//初始化自动返回时间常数while(!endadj){if(RI==1) //接收到数据{RI=0;autobac_tim=0;//自动返回清零ser_temp=SBUF;if((ser_temp>47)&&(ser_temp<58))//进行数值判断{if(i<8)times[i]=ser_temp;if(i>8&&i<14)recfrqs[i-11]=ser_temp;if(i>=14)dates[i-13]=ser_temp;i++;}if(ser_temp=='F') i++;//往前一步if(ser_temp=='B') endadj=1;//退出调整switch(i) //显示处理{case 2:i++;display(l1+11,"min ",0);break;case 5:i++;display(l1+11,"sec ",0);break;case 8:i=i+3;display(l1+11,"frq ",0);break;case 14:i++;display(l1+4,"date year ",0);display(l2," ",1);break;case 17:i++;display(l1+11,"moun",0);break;case 20:i++;display(l1+11,"day ",0);break;case 23:endadj=1;break;}if(i<14){display(l2+1,times,0);display(l2+12,recfrqs,0);write_cmd(0xC1+i);}else{display(l2+3,dates,0);write_cmd(0xC1+i-11);}}if(endadj==1)//写回参数{time[0]=(times[0]-48)*10+times[1]-48;time[1]=(times[3]-48)*10+times[4]-48;time[2]=(times[6]-48)*10+times[7]-48;recfrq=(recfrqs[0]-48)*100+(recfrqs[1]-48)*10+recfrqs[2]-48;date[0]=(dates[2]-48)*10+dates[3]-48;date[1]=(dates[5]-48)*10+dates[6]-48;date[2]=(dates[8]-48)*10+dates[9]-48;}if(autobac_tim>10)endadj=1;}display(l2," ",1);write_cmd(0x0c);//正常显示}void main(){init();while(1){switch(mode){case 1:normal_run();break;case 2:recding_run();break;case 3:data_run();break;}if(RI==1){RI=0;ser_rec=SBUF;switch(ser_rec)case 'A':adj_settings();break;case 'R':mode=2;break;case 'N':mode=1;break;case 'H':tempmode=mode;mode=3;break;case 'D':ser_sents(dates);break;case 'T':times[5]=':';ser_sents(times);break;case 'W':ser_sents(avtemps);break;case 'C':ser_sents(datcounts);break;case 'F':ser_sents(recfrqs);break;}ser_rec=0;}}}void miao() interrupt 1 //秒产生中断{TH0=(65535-9200)/256;TL0=(65535-9200)%256;mss++;if(mss==100){mss=0;time[2]++;autobac_tim++;}if(autobac_tim==255)autobac_tim=244;//保持溢出if(time[2]>=60){time[2]=0;time[1]++;incmin++;}if(time[1]>=60){time[1]=0;time[0]++;}if(time[0]>=24){time[0]=0;dayincf=1;//天自增标志置位date_recf=1;//日期需要记录}/*将返回时间[时分秒*/}②、system.h/******系统I/O******//*****LCD I/O*******/sbit RS=P1^2;sbit LCDEN=P1^1;/*****DS18B20*******/sbit DS=P1^0;#define uchar unsigned char#define uint unsigned intuchar code num[]={'0','1','2','3','4','5','6','7','8','9'};/********时间相关变量************/uchar time[]={23,28,00};//时分秒(10进制数)uchar times[]="15:37:00";//时分秒(ASCII码)uchar mss=0;uchar date[]={11,11,11};//年月日(10进制数)uchar dates[]="2011-10-29";//年月日(ASCII码)bit dayincf=0;bit date_recf=0;//日期记录标志/***********记录频率变量*******************/ uchar recfrq=2; //记录频率(10进制数)uchar recfrqs[]="001"; //记录频率(ASCII码)uint datcount=0;//记录总数uchar datcounts[]="0000";/**************串口接收变量****************/ uchar ser_rec;/*************温度相关变量****************/ uint avtemp=0;uchar avtemps[]="00.0";void delay(uchar z){uchar x,y;for(x=z;x>0;x--)for(y=110;y>0;y--);}void longdelay(uchar z){for(z;z>0;z--)delay(255);}void ser_sent(uchar sendata) //串口发送单字节{SBUF=sendata;while(TI!=1);TI=0;delay(1);}void ser_sents(uchar strings[]) //串口发送字符串{uchar i=0;while(strings[i]!='\0'){ser_sent(strings[i]);delay(20);i++;}ser_sent('\n');}void date_counter() //日期转变{uchar n;//月天数暂存uint year=2000+date[0];//将年转换为标准年if(dayincf==1){dayincf=0;switch(date[1])//根据月份制定月天数{case 1:n=31;break; case 2:if(year%4==0||year%400==0){n=29;} else {n=28;}break;case 3:n=31;break; case 4:n=30;break;case 5:n=31;break; case 6:n=30;break;case 7:n=31;break; case 8:n=31;break;case 9:n=30;break; case 10:n=31;break;case 11:n=30;break; case 12:n=31;break;}date[2]++;if(date[2]>n){date[2]=1;date[1]++;}if(date[1]>12){date[1]=1;date[0]++;}}}void sys_init() //系统初始化{EA=1;TMOD=0x21;TR1=1;REN=1;SM0=0;SM1=1;TH1=0xfA;TL1=0xfA;ET0=1;//允许定时器中断0TH0=(65535-9200)/256;TL0=(65535-9200)%256;// 定时器中断0初值TR0=1;//开中断(秒)ES=0;}void recfrq2recfrqs() //10进制记录频率转字符串{recfrqs[0]=num[recfrq/100];recfrqs[1]=num[recfrq%100/10];recfrqs[2]=num[recfrq%100%10];datcounts[0]=num[datcount/1000];datcounts[1]=num[datcount%1000/100];datcounts[2]=num[datcount%1000%100/10];datcounts[3]=num[datcount%1000%100%10];}void time2times()//10进制时间转字符串{times[0]=num[time[0]/10];times[1]=num[time[0]%10];times[3]=num[time[1]/10];times[4]=num[time[1]%10];if(mss<50) times[5]=':';else times[5]=' ';times[6]=num[time[2]/10];times[7]=num[time[2]%10];}void date2dates()//10进制日期转字符串{dates[2]=num[date[0]/10];dates[3]=num[date[0]%10];dates[5]=num[date[1]/10];dates[6]=num[date[1]%10];dates[8]=num[date[2]/10];dates[9]=num[date[2]%10];}void avtemp2avtemps()//10进制温度转字符串{avtemps[0]=num[avtemp/100];avtemps[1]=num[avtemp%100/10];avtemps[3]=num[avtemp%100%10];}③、LED1602.H#define l1 0x80#define l2 0xc0void write_cmd(uchar con){LCDEN=0;RS=0;P2=con;delay(2);LCDEN=1;delay(2);LCDEN=0;}void write_lcddata(uchar dat){LCDEN=0;RS=1;P2=dat;delay(2);LCDEN=1;delay(2);LCDEN=0;}void display(uchar line,uchar ttb[],bit sign) {uchar i=0;write_cmd(line);//第一行数据起始位while(ttb[i]!='\0'){write_lcddata(ttb[i]);i++;}if(sign==1)//覆盖所有空白{for(i;i<16;i++)write_lcddata(' ');}}void lcd_init(){LCDEN=0;write_cmd(0x38);//置功能write_cmd(0x0c);//显示开启write_cmd(0x06);//显示光标移动设置06右移04左移write_cmd(0x01);//清屏}三.硬件模块设计及原理图设计1.复位电路常见的上电复位和按键复位电路有上电复位、按键脉冲复位、按键电平复位。
基于传感器电路的温度检测系统设计与实现

基于传感器电路的温度检测系统设计与实现温度检测是现代生活中一个重要的功能,广泛应用于各个领域,如工业控制、环境监测、医疗设备等。
传感器电路是温度检测系统的关键组成部分,能够将温度变化转化为电信号,并通过系统进行数据采集和处理。
本文将介绍基于传感器电路的温度检测系统的设计与实现。
首先,我们需要选择合适的温度传感器。
常用的温度传感器包括热敏电阻、热电偶和半导体温度传感器等。
不同的传感器具有不同的特点,因此选择合适的传感器需要考虑应用场景、测量范围和精度等因素。
在本设计中,我们选择了热敏电阻作为温度传感器。
接下来,我们设计传感器电路。
传感器电路包括传感器模块、信号调理电路和数据采集电路。
传感器模块负责将温度转化为电信号,信号调理电路用于对信号进行放大和滤波,数据采集电路负责数据的采集和处理。
在传感器模块中,我们需要将热敏电阻与电路连接。
热敏电阻的电阻值随温度的变化而变化,因此我们可以根据电阻值来推算温度。
为了准确测量电阻值,我们可以使用恒流源和差动放大器。
恒流源可以保证电阻上的电流稳定,差动放大器则可以将电阻的微小变化放大并转化为电压信号。
信号调理电路中,我们可以加入放大器和滤波器。
放大器可以放大传感器产生的微弱信号,提高其测量精度。
滤波器则可以去除噪声信号,保证信号的清晰度和准确性。
数据采集电路是我们将测得的数据转化为可处理的数字信号。
一个常用的方法是使用模数转换器(ADC)将模拟信号转化为数字信号。
ADC可以将连续变化的模拟信号离散化,并将其转化为数字信号,以便于计算机进行处理。
在系统实现过程中,我们需要将传感器电路与微处理器或单片机连接,以实现数据的采集和处理。
微处理器或单片机负责控制系统的运行,并处理从传感器电路中获取的数据,从而实现温度检测功能。
同时,我们还可以将数据通过显示器、存储器或无线通信模块进行展示或传输。
为了提高系统的可靠性和稳定性,我们还可以加入温度补偿电路。
温度补偿电路可以在不同温度下对测量数据进行校正,以减小温度变化对测量精度的影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
任务书设计参数:被测温度1200℃,最大误差不超过±1℃,设计要求:(1).被控对象为小型加热炉,供电电压220VAC,功率 2KW,用可控硅控制加热炉温度;(2).通过查阅相关设备手册或上网查询,选择温度传感器、调节器、加热炉控制器等设备(包括设备名称、型号、性能指标等);(3).设备选型要有一定的理论计算;(4).用所选设备构成实验系统,画出系统结构图;(5).列出所能开设的实验,并写出实验目的、步骤、要求等一摘要本文介绍了一个简单的温度检测与控制系统的设计。
该系统的被控对象为小型加热炉,供电电压为220VAC,功率2KW,被测温度1200度,误差不超过±1℃。
本设计通过热电偶测量加热炉内液体的温度,将热电偶的输出信号直接传输到调节器,该调节器内部集成有变送器,并且可设定给定温度值,本实验为1200度。
调节器将偏差信号变为标准的4—20MA或1—5v电信号。
该信号输出到调功器,可改变晶闸管导通时间,从而调节输出平均电压的大小,实现加热炉温度的控制。
经验证此控制器的性能指标达到要求。
二系统框图本系统中,检测单元热电偶,调节器为集成变送器的数字调节器,执行器为可控硅调功器,被控对象为加热炉,被控参数为温度。
三设备选型1 热电偶热电偶要求测温度1200度,误差不超过±1℃,所以决定了只能用铂铑等贵金属材料热电偶。
铂铑热电偶又称高温贵金属热电偶,铂铑有单铂铑(铂铑10-铂铑)和双铂铑(铂铑30-铂铑6)之分,它们作为温度测量传感器,通常与温度变送器、调节器及显示仪表等配套使用,组成过程控制系统,用以直接测量或控制各种生产过程中0-1800℃范围内的流体、蒸汽和气体介质以及固体表面等温度。
铂铑热电偶的工作原理是铂铑热电偶是由两种不同成分的导体两端接合成回路时,当两接合点温度不同时,就会在回路内产生热电流。
如果热电偶的工作端与参比端存在有温差时,显示仪表将会批示出热电偶产生的热电势所对应的温度值。
铑-铂WRP系列热电偶。
高温贵金属(铂铑)热电偶1、应用适用于各种生产过程中高温场合,广泛应用于玻璃及陶瓷及工业盐浴炉等测温。
2、主要技术参数电气出口:M20x1.5,NPT1/2精度等级:I 、 II防护等级:IP65偶丝直径:Φ0.5公称压力:常压3、型号及规格应系统要求,可选择WRP-130,热响应时间小于150s的I级热电偶。
2 调节器本设计采用数字调节器,内集成有变送器,可直接接热电偶,将调节后的信号转换为4-20MA或1-5V的标准信号输出。
数字式PID调节器采用了先进的嵌入式微处理器,结构紧凑,功能强;采用遵守CAN2.0A协议的82C250和SJA1000芯片,数据通信快递精确,全数字化,全分散,全开放;具有广泛的适用性,温控范围可达0—1600℃:精度高,最小可以采样2uV的信号;使用了独立的RAM 存储器,各种参数可以随时修改和保存:面板上设有按键和LED显示屏,可以实时地监测、更改各个参数,操作简单,工作可靠。
本设计选择SDC40A数字指示调节器,其规格说明如下:SDC40A数字指示调节器SDC40A小型(96mm×96mm)数字指示调节器是一种高精度指示调节器,可接受热电偶、热电阻、直流电压、直流电流的输入信号并对其进行控制。
一般功能记忆材料半导体不挥发性存储器电源85~264VAC,50/60Hz 消耗功率25VA max环境温度0~50℃环境湿度10~90%RH(无结露) 重量约750gPV输入(PV1) 类型热电偶,热电阻,直流电压/电流(国际标准) 采样周期0.1S精度±0.1%FS偏置-1000~+1000U(U:工程单位)(PV2) 类型4~20mACC,1~5VDC指示设定PV,SP指示5位7段LED功能指示2位7段LED柱状LED MV,OK指示,事件指示,RSW监视设定点数1或8点可选量程可选择SP限制下限:-1999~上限上限:下限~26000控制输出PID参数组8((3D/AK/5K/9K/BK:4点冷却,4点加热)PID自动整定普通自整定/人工神经原+模糊推论整定/智能整定输出限幅下限:0~上限上限:下限~100%变化率限制0.1~10.0%/100ms作用方式正/反作用可选择SP斜坡0~26000,单位:/h,0.1h./min,0.1/min远程开关RSW输入通道数4或12功能NOP,READY/RUN,AUTO/MANUAL,REMOTEL/LOCAL AT启/停,正/反作用,SP选择(PID参数同时),MV固定输出输入2的比例号选择,计算机的馈方式1/2事件EV输入类型集电极开路干接点点数2(标准型),3或8(选项)3 执行器根据系统要求执行器选择可控硅调功器。
可控硅调功器就是一种以可控硅(晶闸管)为基础,以智能数字控制电路为核心的电源功率控制电器。
简称可控硅调功器。
又称调功器、可控硅调压器、电力调整器、电压调整器、晶闸管调压器、晶闸管调功器、晶闸管调整器、调压器、晶闸管控制器、晶闸管交流电力控制器、可控硅调整器、可控硅控制器、电力控制器、可控硅交流电力控制器、电压控制器等。
具有效率高、无机械噪声和磨损、响应速度快、体积小、重量轻等诸多优点。
目前可控硅调功器主要有两种工作方式,一种是移相触发工作方式,另一种是过零触发工作方式.(1). 移相触发工作方式:利用数字电路或模拟电路,根据输入控制信号,计算出可控硅触发控制角,并在过零后进行延时触发.(2).过零触发工作方式:过零触发工作方式通常分为二种,第一种是定周期过零控制,即在一个设定周期内利用通断比例控制输出功率大小;第二种是变周期过零控制,该工作方式下,输出电压对负载冲击小。
设计中选择的调功器信息如下:Kt16P系列单相可控硅调压器/调功器(1)功能概述Kt16P系列单相可控硅调压器/调功器是具有高度智能化的新型功率控制设备,集移相调压型和变周期过零调功型两种触发方式于一体,通过外部转换开关可在两种触发方式之间任意转换,所以既可以做调压器也可以做调功器。
触发板采用CPU控制,并具有看门狗保护,输出全部采取隔离技术,可控硅采用德国原装进口模块,过载能力强,可靠性高。
设置方便,接线简单,具有多种保护功能。
其有斜率调整、缓起动、缓关断、电流限制、过流保护,散热器超温保护等功能,与智能温度控制仪表连接,实现温度的自动控制,适应于感性负载、阻性负载及各种电加热设备。
(2)技术规格◆控制输入信号电流输入:4-20mADC,输入阻抗:120Ω电压输入(订货时申明)◆电源电压:220VAC 频率50HZ (380VAC订货申明)◆冷却方式:100A及以上强制风冷,50A及以下自然冷却◆调节输出范围: (0-100%)Us Us为电源电压◆采样周期控制输入信号:10次/每秒负载电流:50次/每秒◆报警继电器触点容量:220VAC 1A(阻性)◆运行环境周围温度范围:-10℃~50℃周围湿度:≤90%RH海拔高度:超过1000米因空气密度减小应降额使用◆绝缘阻抗:最小20MΩ 1000VDC◆绝缘体强度:2500VAC 1分钟◆手动调节电位器:10KΩ/2W(3)功能设定1) P1电位器P1电位器是前置放大电位器,目的是将4-20mADC转换为0-5VDC,出厂已设置好,无需设置。
2) P2电位器P2电位器为过电流报警设定电位器,出厂设置为:当负载电流超过额定电流的1.1倍时发生过流报警。
可根据需要自行设置,设置方法(设置时调压器/调功器必须在移相调压型触发方式下才能进行,如果你订的是调功器,请先将USR和GND短路,设定好之后再断开):比如你想让调压器/调功器在负载电流超过100A 发生过电流报警,那么你用手动功能调节调压器/调功器输出的实际电流为50A,这时把两位拔码开关的第1位(即SW-1)拔到左边(出厂已拔到右边ON位置),再调节P2电位器直到三色指示灯STATE变为黄色为止(变为黄色后不要再调节P2电位器),然后把拔码开关的第1位即SW-1拔到右边ON位置,这样就完成了,当负载实际电流超过100A时调压器/调功器就会发生过电流报警,调压器/调功器停止输出,报警继电器动作,三色指示灯STATE变为红灯直亮。
3) P3电位器P3电位器为电流限制电位器,出厂设置为当负载电流超过调压器的额定电流时调压器自动减小输出电压直到负载电流小于调压器的额定电流。
用户可根据现场需要设置P3电位器。
电流限制功能只有调压才有这个功能,调功方式下没有这功能。
4)两位拔码开关SW拔码开关的第1位即SW-1拔到左边的时候为过电流报警设置(参照4.2)这时不发生过流报警,拔到右边(即ON位置)的时候,过电流报警功能起作用。
SW-2没有定义。
5)控制端子USR和GND若USR和GND开路为调功状态,USR和GND短路为调压状态。
6)控制端子RS和GND若RS和GND开路为缓起动(缓起动时间为15秒),U1和GND短路为缓关断(缓关断时间为15秒)。
(4)调压/调功说明1)移相调压型移相调压型是通过改变导通角的大小来调整输出电压,这种触发方式连续性好,输出电压平稳,无电压冲击,能够限制瞬时电流,适合各种类型的负载,目前变压器,电感线圈以及变阻性负载均采用这种触发方式。
但是这种触发方式会对电网产生谐波污染。
2)变周期过零调功型变周期过零调功型是在正弦波的零点触发,以完整的正弦波为单位,通过改变通断的正弦波的周期来调整输出功率。
使导通的正弦波均匀分布,电压表、电流表的表针只有轻微的抖动,多台调整器运行时避免了电流的集中,因为在正弦波的零点触发所以对电网没有污染,功率因素高,但无法限制瞬时电流,故不能用于感性负载和变阻性负载,恒阻性负载一般都采用这种触发方式。
(5)接线◆端子C1和端子C2为自动信号输入端。
1为正,2为负,标准输入信号为4~20mA,其它信号订货申明。
◆端子GND、R1、R2和V0为自动/手动信号转换输入端。
手动信号由手动电位器提供,电位器的规格为10KΩ/2W;不需要手动调节时将R1和R2短接即可(出厂已短接)。
◆端子USR和GND上的SA2开关为调压/调功转换开关。
SA2断开为变周期过零调功型,SA2闭合为移相调压型。
◆端子RS和GND上的SA1开关为缓起停开关。
SA1开关断开的时候可控硅调压器/调功器处于运行状态,SA1开关闭合的时候可控硅调压器/调功器处于停止状态。
当SA1开关从断开变成闭合时,可控硅调压器/调功器开始缓关断,缓关断完成后可控硅调压器/调功器进入停止状态。
当SA1开关从闭合变成断开时,可控硅调压器/调功器开始缓起动,缓起动完后可控硅调压器/调功器进入运行状态。
(在上电时如果SA1开关处于断开状态,可控硅调压器/调功器也具有缓起动功能。