行星动力换档变速箱
工程机械底盘复习题及答案

20、转向四连杆机构,对于前轮转向,可以将其分为转向梯形前置式、转向梯形后置式,通常优先采用转向梯形后置式
21、主离合器高档起步比低档起步滑磨功大。22、行星排的特性参数为齿圈齿数与太阳轮齿数之比。
23、十字轴万向节随着主动轴从动轴的夹角的增大,附加弯矩增大,传动效率减小
1.牵引力、驱动力、行驶阻力之间存在的关系为 。
2.行星变速箱选配齿轮时,除了需要满足传动比的要求外还要满足一定的安装条件,即同心条件装配条件相邻条件。
3.摩擦力距,摩擦片直径与转矩储藏系数是主离合器设计的主要参数。
4. 半浮式半轴是指半轴通过一个轴承直接支撑在桥壳外端上的构造;全浮式半轴那么是将桥壳用两副相距较远的轴承支撑在车轮轮毂上
12、制动性能的评价指标是制动距离来衡量。
13. 、车辆在水平地面行驶的充分必要条件为Pφ>=Pk>=Pkp+Pf。
14、制动性能通常用制动距离来衡量,它是指从操纵制动机构开场作用到机械完全停顿的过程中机械所行驶的距离。
15、对于不等速十字轴万向节来说,当被连接的两轴的主动轴的角速度恒为 时,从动轴的角速度 在cosα*ω与cosα/ω之间变化,主动轴转一周,从动轴转1周。
16.动力特性是反映铲土运输机械在运输工况下动力性能的根本特性曲线。利用动力特性可以很方便的来评价铲土运输机械的速度性能,加速性能,与爬坡能力。
17.轮式工程机械的转向分为三类:1、偏转车轮的转向2、铰接车架转向方式3、速差〔滑移〕转向
发动机最大力矩与土壤附着条件两个方面制约。
名词解释
:履带或车轮相对地面向后运动的程度通常用滑转率δ来表示,它说明了由于履带或车轮向后运动而引起的车辆行程或速度的损失,并可由下式计算:δ=〔lT-l〕÷lT=1-〔l÷lT〕或δ =〔vT-v〕÷vT=1-〔v÷vT〕。
行星变速箱
第五节.结构设计
(1).齿轮传动设计;(2)。构件支撑及浮动件。 (3)。行星架;行星轮。(4)。箱的润滑油
1.齿轮传动设计
(1) m,Dq
(2)配齿条件
③ 相邻条件
④ 最小齿数 ⑤ 齿轮的变位
③ 相邻条件 为保证相邻行星轮齿顶不干涉并减少搅油损失, 一般使齿顶之间的问隙大于5~8mm。
八种方案
直接档
组成八种方案
由上述可见,一个简单行星排可以给出八种传动方案,但其传动比 数值因受特性参数值的限制,尚不能满足机械的要求,因此,行星 变速箱通常是由几个行星排组合而成,以便得到所需的传动比。如; 两个行星排;几个行星排组合成变速箱。
例: 分析:两个行星排:t1, j1, q1; t2, j2, q2; t1 = t2 ;j1 = q2 ;(两组构件连接); 余下:t1 = ni, j2 = no ; q1制动: nq1 = 0 Ni 输入(已知); 总计 1, 2;两个自由度,对应俩方程。(转速方程)
T j Tt Tq Tt (1 )
Tj (1 )
(4-21)
(4-20)
得单行星行星排理论内转矩关系式:
对双行星可用类似方法求得理论内转矩关系式: Tq Tj Tt (4-22) ( 1)
2。行星传动的能量损失—传动效率
注:(诸上册165-168)
制动器
第二节. 简单行星排(单,双行星排)
如图4-17所示,简单行星排是由太阳轮t、齿圈q、行星架j和行星轮x组成。由于行星轮 轴线旋转与外界连接困难,故在行星排中只有太阳轮t、齿圈q和行星架j等三个元件能 与外界连接,并称之为基本元件。在行星排传递运动过程中,行星轮只起到传递运动的 隋轮作用,对传动比无直接关系。(行星轮的转速,受力。。。。。)
2.2动力换挡变速箱构造与维修

变速、变矩油泵
工作油泵
动力输入
变 速 操 纵 阀
动力输出
任务二 动力换挡变速箱构造与维修
Connected with turbine
Connected with stator
Connected with HYD pump (PTO)
任务二 动力换挡变速箱动力传递
动力源发动机
变矩器弹性板
变矩器泵轮
工程机械底盘构造与维修
发动机 后桥
变矩器 变速箱 前轴
后驱动轴
驱动
前桥
任务二 动力换挡变速箱构造与维修
知识目标: 1、会描述动力换挡变速箱功用、类型及原理。 2、会描述动力换挡变速箱典型结构。 3、会分析动力换挡变速箱各档动力传递路线。 4、会分析动力换挡变速箱控制原理。 5、会分析动力换挡变速箱常见故障原因。
动力换挡变速箱类型特点
5、动力换档比人力换档作业周期短,只用一根变速 杆,变速时无需减速和制动,因而在其他性能参数 相同时,生产率明显提高。
缺点: 1、结构复杂,零件多,制造困难(行星架、齿圈加工 复杂); 2、选择传来自方案时,凑速比等设计工作费事;
简单行星排原理
行星轮 行星架
轮太阳
齿圈
主动片
• L :9 + D H :4+ D
R1:A+ 1 R2: A +5
• 动力传递 F1+L B→2 → 3 → 8 → 9 → D →10 → 11 → E
• F2+L B → 6→7→8→9 → D→10→11→E
1、 动片 2、 齿轮 3、 弹簧 4、 承压板 5、 从动片 6、 齿轮包 7、 轴 8、 活塞
换挡离合器
单离合器式(一根轴上装一个离合器) 双离合器式(一根轴上装二个离合器,常共用外鼓 可减少轴的数量和变速器的径向尺寸)
动力换挡变速箱拆装实训
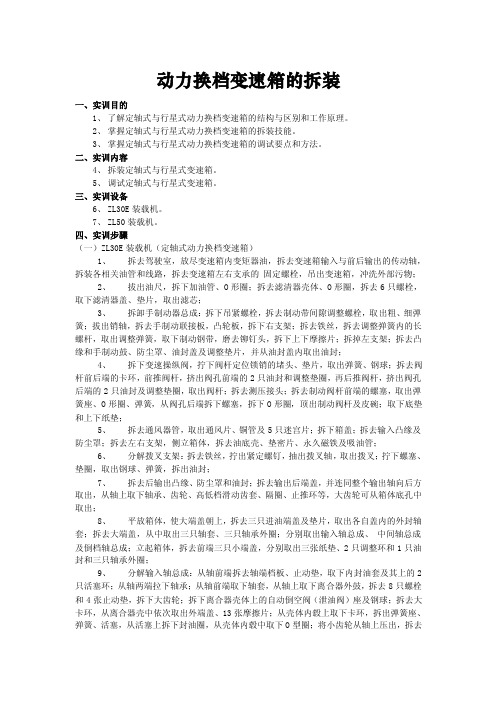
动力换档变速箱的拆装一、实训目的1、了解定轴式与行星式动力换档变速箱的结构与区别和工作原理。
2、掌握定轴式与行星式动力换档变速箱的拆装技能。
3、掌握定轴式与行星式动力换档变速箱的调试要点和方法。
二、实训内容4、拆装定轴式与行星式变速箱。
5、调试定轴式与行星式变速箱。
三、实训设备6、ZL30E装载机。
7、ZL50装载机。
四、实训步骤(一)ZL30E装载机(定轴式动力换档变速箱)1、拆去驾驶室,放尽变速箱内变矩器油,拆去变速箱输入与前后输出的传动轴,拆装各相关油管和线路,拆去变速箱左右支承的固定螺栓,吊出变速箱,冲洗外部污物;2、拔出油尺,拆下加油管、O形圈;拆去滤清器壳体、O形圈,拆去6只螺栓,取下滤清器盖、垫片,取出滤芯;3、拆卸手制动器总成:拆下吊紧螺栓,拆去制动带间隙调整螺栓,取出粗、细弹簧;拔出销轴,拆去手制动联接板,凸轮板,拆下右支架;拆去铁丝,拆去调整弹簧内的长螺杆,取出调整弹簧,取下制动钢带,磨去铆钉头,拆下上下摩擦片;拆掉左支架;拆去凸缘和手制动鼓、防尘罩、油封盖及调整垫片,并从油封盖内取出油封;4、拆下变速操纵阀,拧下阀杆定位锁销的堵头、垫片,取出弹簧、钢球;拆去阀杆前后端的卡环,前推阀杆,挤出阀孔前端的2只油封和调整垫圈,再后推阀杆,挤出阀孔后端的2只油封及调整垫圈,取出阀杆;拆去测压接头;拆去制动阀杆前端的螺塞,取出弹簧座、O形圈、弹簧,从阀孔后端拆下螺塞,拆下O形圈,顶出制动阀杆及皮碗;取下底垫和上下纸垫;5、拆去通风器管,取出通风片、铜管及5只迷宫片;拆下箱盖;拆去输入凸缘及防尘罩;拆去左右支架,侧立箱体,拆去油底壳、垫密片、永久磁铁及吸油管;6、分解拨叉支架:拆去铁丝,拧出紧定螺钉,抽出拨叉轴,取出拨叉;拧下螺塞、垫圈,取出钢球、弹簧,拆出油封;7、拆去后输出凸缘、防尘罩和油封;拆去输出后端盖,并连同整个输出轴向后方取出,从轴上取下轴承、齿轮、高低档滑动齿套、隔圈、止推环等,大齿轮可从箱体底孔中取出;8、平放箱体,使大端盖朝上,拆去三只进油端盖及垫片,取出各自盖内的外封轴套;拆去大端盖,从中取出三只轴套、三只轴承外圈;分别取出输入轴总成、中间轴总成及倒档轴总成;立起箱体,拆去前端三只小端盖,分别取出三张纸垫、2只调整环和1只油封和三只轴承外圈;9、分解输入轴总成:从轴前端拆去轴端档板、止动垫,取下内封油套及其上的2只活塞环;从轴两端拉下轴承;从轴前端取下轴套,从轴上取下离合器外鼓,拆去8只螺栓和4张止动垫,拆下大齿轮;拆下离合器壳体上的自动倒空阀(泄油阀)座及钢球;拆去大卡环,从离合器壳中依次取出外端盖、13张摩擦片;从壳体内毂上取下卡环,拆出弹簧座、弹簧、活塞,从活塞上拆下封油圈,从壳体内毂中取下O型圈;将小齿轮从轴上压出,拆去两端卡环,拆出2只轴承;10、分解中间轴、倒档轴总成的方法类同分解输入总成,只不过离合器的前后方向与输入轴相反,另外比输入轴多一只齿轮(中间轴)或一只轴套(倒档轴);11、清洗各零件后按相反顺序组装(三只离合器总成除外);12、组装离合器总成:装上离合器壳体上的钢球及自动倒空阀(泄油阀)座,装上大齿轮,在壳体内毂装上O形圈;将活塞上套上封油圈,涂抹干净的机油,将活塞装入壳体,在内毂装入弹簧、弹簧座并压缩弹簧上好卡环;离合器主动片(外齿)共6张,是铜基粉末冶金摩擦片;从动片是钢片,共5片,并有0.5 mm的凹度,装配时凸面向着活塞端;将11张摩擦片按外齿、内齿、外齿的顺序依次装入壳体,再装上外端盖、卡环;若转动费力,说明间隙小,可调换薄一些的摩擦片;将小齿轮装上卡环、轴承后在轴上装到位;将大齿轮在下、离合器在壳体上放置架空,对中并拨齐内齿摩擦片的齿后,将轴插入大齿轮的花键毂中,左右不停地转动小齿轮,直至小齿轮的花键部分插入从动片内齿而且轴的花键插入大齿轮时为止(当花键轴伸出大齿轮的长度和轴套宽度一致时才说明离合器安装到位);如轴伸出尺寸不够,则说明还有从动片的内齿偏离,与小齿轮没有进入啮合状态;13、组装完毕后调整输入、中间、倒档三轴的轴向间隙;14、调整手制动器:调整右支架下方的调整螺栓,使制动带下方的间隙为1~1.5mm,调整吊紧螺栓使整个制动带上下方的间隙均匀地为1~1.5mm,如制动带间隙左右不均,通过调节左支架处的调整螺栓予以修正。
变速箱的功用与类型
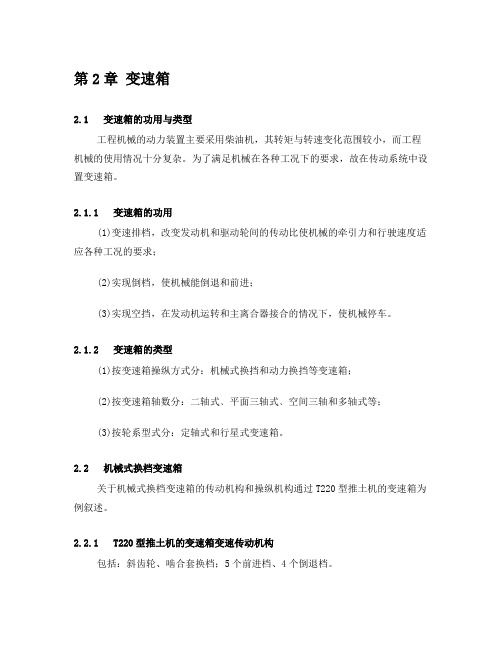
第2章变速箱2.1 变速箱的功用与类型工程机械的动力装置主要采用柴油机,其转矩与转速变化范围较小,而工程机械的使用情况十分复杂。
为了满足机械在各种工况下的要求,故在传动系统中设置变速箱。
2.1.1 变速箱的功用(1)变速排档,改变发动机和驱动轮间的传动比使机械的牵引力和行驶速度适应各种工况的要求;(2)实现倒档,使机械能倒退和前进;(3)实现空挡,在发动机运转和主离合器接合的情况下,使机械停车。
2.1.2 变速箱的类型(1)按变速箱操纵方式分:机械式换挡和动力换挡等变速箱;(2)按变速箱轴数分:二轴式﹑平面三轴式﹑空间三轴和多轴式等;(3)按轮系型式分:定轴式和行星式变速箱。
2.2 机械式换档变速箱关于机械式换档变速箱的传动机构和操纵机构通过T220型推土机的变速箱为例叙述。
2.2.1 T220型推土机的变速箱变速传动机构包括:斜齿轮、啮合套换档;5个前进档、4个倒退档。
结构特点:(1)双金属衬套滑动轴承;(2)双列球面滚柱轴承和滚柱轴承;(3)前盖可卸:止口定心、销钉圆周定位;(4)强制润滑:转向离合器操纵阀来油。
2.2.2 T220型推土机的变速箱变速操纵机构变速操纵机构组成:(1)换档机构:用来操纵变速箱的啮合套,挂上或脱开相应的档位。
(2)锁止机构:对变速箱操纵机构的要求,主要由锁止装置来实现。
锁止装置包括锁定机构﹑连锁机构﹑互锁机构﹑保险装置。
要求:(1)保证工作齿轮以全齿长啮合;(2)不能同时换入两个档;(3)换档后不能自动脱档;(4)离合器接合时不能换档;(5)要有防止误换到最高档或倒档的保险装置。
图2-1 T220型推土机变速箱1 –轴承座2 –联轴节3 –轴承盖4 –轴承座5 –前盖6 –箱体7 –V档套合器8 –变速箱主轴 9 –变速箱副轴 10 –变速箱中间轴 11 –Ⅰ﹑Ⅱ档套合器 12 –Ⅲ﹑Ⅳ档套合器13 –进退档套合器 14 –磁性放油塞 15 –压盖 16 –轴承盖图2-2 T220型推土机变速箱操纵机构1–拔叉轴 2–密封圈 3–轴 4-油封 5﹑6–滚针轴承 7–定位螺钉 8–盖 9–变速杆 10–衬套 11–螺栓 12–拔叉室 13–锁定销 14–弹簧 15–16–密封圈 17–弹簧 18–进退手柄 19–进退杆 20–拔叉室上盖 21–销 22–衬套 23–弹簧 24–拔叉轴后座 25、26–保险卡 27–止动销 28–五档滑杆 29–进退叉头 30–进退滑杆 31–Ⅲ﹑Ⅳ档滑杆 32–Ⅰ﹑Ⅱ档滑杆 33–塞 34–连锁杠杆 35–拔叉轴前座 36–销 37–连锁衬套 38–限位板 39–Ⅰ﹑Ⅱ档拔杆 40–拔杆 41–Ⅲ﹑Ⅳ档拔杆 42–拔叉 43–进退拔叉头 44–拔叉头2.3 行星式换档变速箱行星式动力换档变速箱由简单行星组成。
工程机械底盘设计题库及答案
1.画简图说明变矩器与发动机共同工作的输入特性,并说明其影响因素是什么?变矩器透穿性:影响共同工作输入特性的范围大小。
变矩器有效直径:影响共同工作输入特性的位置高低2. 试说明行星式动力换档变速箱的换档动作是如何实现的,并解释行星传动的“闭锁”现象及其作用。
实现:行星动力换挡变速箱有许多行星排,换挡动作主要靠制动器制动各行的行星排的齿圈来实现,只有采用少数离合器行星传动的闭锁: 在行星传动中如果某一行星排的太阳轮、行星架、齿圈三个元件任意两个的转速相等,第三件的转速也必然与前两个相等。
常利用这种方法实现直接挡3.简述液力变矩器的级和相的概念,并分析单级两相液力变矩器的结构和工作特点。
相——液力变矩器工作轮的工作状态数。
泵轮与导轮之间或导轮与导轮之间刚性相连的涡轮数目称为变矩器的级。
4.简述离合器转矩储备系数的概念和确定方法。
主离合器为何存在储备系数:为了保证主离合器能可靠地传递发动机的最大转矩和具有一定的使用寿命,必须使主离合器传递摩擦转矩的能力具有一定的储备量。
考虑因素(1)、摩擦片有了磨损之后仍能可靠地传递发动机的最大扭矩;(2)、防止离合器本身滑磨过大;(3)、防止传动系超载。
9. 画简图说明中间档传动比确定的速度连续原则。
发动机应该始终工作于设定功率Ne′以上的范围,当由于工况变化使机器工作于设定范围的端点时换档,换档后机器立刻工作于设定范围的另一端点,而且换档前后机器的理论速度应该不变。
10.画简图说明变矩器与发动机匹配的最大牵引功率原则。
为了获得最大牵引功率,要求共同工作的输入特性曲线上,液力变矩器最高效率时的传动比(i*)所对应的负荷抛物线通过柴油机额定工作点MeH,这样机器可以获得最大的功率11.车轮的制动力应如何分配?当机械的结构一定,重心位置一定时,前、后轮制动力的比值是路面附着系数的函数。
速度较低时,一般只在驱动轮上设置制动器。
中速机械,后轮先抱死。
高速机械,前后轮同时抱死。
变矩器变速箱原理及常见故障处理方法装载机维修技术
11
2、四元件综合式液力变矩器。 其构造示意图如图所示。 四元件综合式液力变矩器的
缺点 ①结构较为复杂 ②制造难度大 ③生产成本高 ④维修困难 ⑤传动效率低
47
3、安轮系形式分类:定轴式、行星式
⑴定轴式变速器
48
⑵ 行星式变速器
49
工程机械常用的变速器 ⑴ 滑动齿轮人力换挡变速器 ⑵ 啮合套人力换挡变速器 ⑶ 滑动齿轮和啮合套组合人力换挡变速器 ⑷ 直齿轮(和斜齿轮)长啮合动力换挡变
液压泵
变矩器 柴油机
前传动轴
后传动轴 变速箱
前驱动桥
后驱动桥
5
变矩器——变速箱
ZL系列装载机 变矩器-变速器装配图
6
二、液力变矩器
液力变矩器安装在变速器齿轮的输入端, 通过驱动盘固定在发动机的后端。
7
液力变矩器的功用
1、成倍增长发动机产生的转矩。 2、起到自动离合器的作用,传送或断开发 动机至变速器的转矩。 3、缓冲发动机及传动系的扭转振动。 4、起到飞轮的作用,使发动机转动平稳。 5、驱动液压控制系统的液压泵。
阀等各挡公用油路和部件上。在出现这种故障时,可以观察到整机不行走时主传 动轴也不转动。
对于这类故障,首先检查变速箱内液压油油量是否足够,方法是使发动机处 于怠速状态,观察油位应在变速箱侧面的油标中部,如看不到油面应补足油液。 油位正常后区分故障是突然出现还是逐渐出现。如属突发性故障,应拆检减压阀 是否脏污、阀芯表面是否划伤卡死在最小供油位置,可通过清洗研磨解决再检查 行走泵连接套花键是否损坏;如故障征兆缓慢出现,一般属于行走系零部件逐渐 磨损或油液清洁度差造成的故障,可按以下顺序检查: (1)判断故障是否在变矩器。检查安装在车后架上的机械油回油滤清器,如滤网上 附着有大量的铝粉,即可断定变矩器内轴承损坏导致“三轮”磨损,应拆卸变矩 器,更换损坏的零部件并清洗油路。
行星齿轮式动力换挡变速箱设计

行星齿轮式动力换挡变速箱设计专业:学号:学生:指导教师:摘要:随着国民经济的持续发展,机械工业也在不断地发展着,各种设备都在不断地发展,创新着。
特别是在农业方面,变速箱的应用非常广泛,在一些特定的工作场合,变速箱体积小,变速灵活,价格成本低廉很受欢迎,根据市场调查发现,变速箱必须满足当今人们对汽车速度调节方面的灵活性操控等需求,能够在不改变发动机的扭矩和转速的情况下,改变变速箱的驱动力和行驶速度;在发动机曲轴旋转方向不变的情况下,使变速箱前进或后退;在发动机不熄灭的情况下,可使变速箱长时间停车或进行固定作业。
目前市面上的变速箱大多都是采用传统的变速结构,在某些特定的区域,这种结构形式的变速箱非常不受欢迎。
由于以往的变速箱采用传统的结构形式,这样就造成传动精度不好控制,保养维护费用较高;同时存在一定的安全隐患。
因此,对整机的安全性要求较高,操作时也会给工作人员带来强烈的震动,使得操作很不舒服。
虽然传通的变速箱传动效率较高,变速效果较好,但是价格也较昂贵,对于一般的用户难以接受。
所以研究一种新式的行星齿轮式动力换挡变速箱势在必行!变速箱作为机动车辆中的核心部件的一种,它工作时,发动机通过V带传动带动变速箱转动,从而间接地带动了车轮的转动,这样车辆就可以行驶了。
本文介绍了行星齿轮式动力换挡变速箱的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,以及对其结构进行创新设计,该变速箱的优点是传动链短、效率高、易加工、使用和维护都很方便,较适合在恶劣的环境下工作,最主要的是其传动效率很高。
关键词:行星齿轮式动力换挡变速箱;扭矩;结构;校验The design of planetary gear type power shift gear boxSpecialty:Student Number:Student:Supervisor:Abstract:With the development of national economy, machinery industry is also in constant development, all kinds of equipment are in constant development and innovation. Especially in agriculture, application of transmission is very extensive, in some specific occasions, gear box has the advantages of small volume, flexible speed, low cost is very popular, according to market research found that the transmission must satisfy the people to the automobile speed adjusting flexibility of the manipulation of the requirements, can not change the engine the torque and speed change gear box case, the driving force and speed in the same direction of rotation of the engine crankshaft; under the condition of the gearbox forward or backward; when the engine is not out of the case, can make the transmission to stop for a long time or fixed operation.Currently on the market most of the gearbox is used in traditional variable structure, in some specific area, the transmission of this kind of structure is not very popular. Since the transmission past the traditional forms of structure, thus causing the transmission accuracy control is not good, the maintenance cost is high; at the same time, there are some security risks. Therefore, the security requirements of the higher, the operation will give the staff to bring a strong shock, so that the operation is very uncomfortable. Although the transmission through the transmission efficiency is high, the transmission effect is good, but the price is more expensive, for the average user to accept. So the research of a new type planetary power Transmission as a core component in a motor vehicle, when it is working, the engine through the V belt drives the gear box to rotate, thereby indirectly driven by the rotation of the wheels, so that the vehicle.This paper introduces the theoretical calculation, structure design must be the planetary power shift gearbox working principle and main parts of the strength check and correlation, and the innovative design of the structure, the advantages of the gearbox is a short drive chain, high efficiency, easy to manufacture, use and maintenance are very convenient, more suitable for work in the bad environment, the most important is its high transmission efficiencyKey words:planetary gear type power shift gear box;Crankshaft;Processing craft;Fixture;绪论 (1)1. 课题的来源及研究的目的和意义............................ 错误!未定义书签。
行星式动力换挡变速器设计说明书
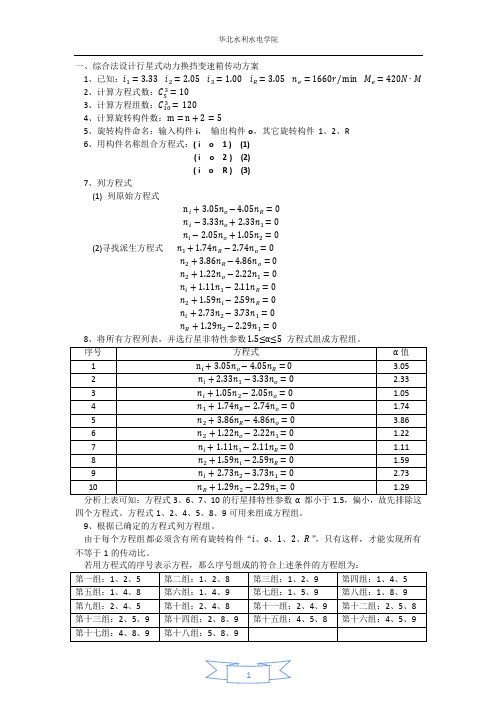
一、综合法设计行星式动力换挡变速箱传动方案1、已知:i1=3.33 i2=2.05 i3=1.00 i R=3.05 n e=1660r/min M e=420N∙M2、计算方程式数:C53=103、计算方程组数:C103=1204、计算旋转构件数:m=n+2=55、旋转构件命名:输入构件i,输出构件o,其它旋转构件1、2、R6、用构件名称组合方程式:( i o 1 ) (1)( i o 2 ) (2)( i o R ) (3)7、列方程式(1) 列原始方程式n i+3.05n o−4.05n R=0n i−3.33n o+2.33n1=0n i−2.05n o+1.05n2=0(2)寻找派生方程式n1+1.74n R−2.74n o=0n2+3.86n R−4.86n o=0n2+1.22n o−2.22n1=0n i+1.11n1−2.11n R=0n2+1.59n i−2.59n R=0n i+2.73n2−3.73n1=0n R+1.29n2−2.29n1=0四个方程式。
方程式1、2、4、5、8、9可用来组成方程组。
9、根据已确定的方程式列方程组。
由于每个方程组都必须含有所有旋转构件“i、o、1、2、R”,只有这样,才能实现所有不等于1的传动比。
若用方程式的序号表示方程,那么序号组成的符合上述条件的方程组为:10、根据方程组绘制变速箱传动示意图:由于每组都有三个方程,共6种排法,但形如1 2 5和5 2 1两种排法在结构上是相同的,故只用画出其中一种传动示意图即可。
由此可知每组方程组都有三种结构不同的排法。
第一组:1、2、5⑴⑵⑸⑴⑸⑵⑵⑴⑸o 1 R o R 1 1 o RR o o R o o o R oi i 2 i 2 i i i 2第一组第一种排法两个R无法连在一起,故排除;旋转构件2制动件不能引至箱件,故排除。
第二组:1、2、8⑴⑵⑻⑴⑻⑵⑵⑴⑻o 1 i o i 1 1 o iR o R R R o o R Ri i 2 i 2 i i i 2上图两个R连不到一起排除。
工程机械底盘工作原理介绍
轮式由机架、悬架、桥壳与轮胎、轮 辋等组成。
轨行式由机架、转向架和轮对等组成。
步行式由机架和步行装置等组成。
3、转向系
转向系用以保证工程机械行走时改变行走 方向。
履带式工程机械由操纵传动系中转向离合 器和转向制动器实现转向,或由分别操纵左右 两侧履带的传动实现转向。
为此,传动系统的功用就是将发动机的动力按需要适当降低转
速增加转矩后传动驱动轮上,使之适应工程机械运行或作业的需要。
此外,还具有切断动力、倒行、变速和差速的功能。
增扭 减速
2、传动系统的分类、组成
机械传动;液力机械传动;液压传动;电传动。
(1)机械传动
• 轮式:发动机→主离合器→变速箱→传动轴→ 主传动器、差速器→ 轮边减速器;
安全,故设有主制动装置、停放制动装置。
轨行式工程机械的制动装置与制动系 统与机车车辆的制动装置与制动系统类似。
传动系统概述
1、传动系统的功用
工程机械的动力装置和驱动轮之间的传动部件总称为传动系统。
内燃机特性与作业机械之间的矛盾: 内燃机的输出特性:转矩小、转速高和转矩、转速变化范围小 工程机械的作业要求:大转矩、低速度;转矩、速度变化范围大。
• 履带式:发动机→主离合器→变速箱→ 主传动器(中央传动)→终传动装置;
优点:结构简单,工作可靠,价廉,传动效率高, 可利用惯性作业等。
缺点:①当外阻力变化剧烈时易熄火; ②换档时动力中断时间长; ③机械循环作业时频繁换档劳动强度大; ④传动系零部件受到的冲击载荷大; ⑤机械变速箱档位较多,结构复杂。
⑵膜片弹簧与压盘以整个圆周接触,使压力分布均匀,摩擦片的 接触良好,磨损均匀。
⑶膜片弹簧具有非线性的弹性,所以在从动盘磨损后,仍能可靠 地传递发动机的转矩,而不产生滑磨。此外,在使离合器分离时,还 能使离合器踏板操纵轻便,减轻驾驶员的劳动强度。
推土机传动系统的结构、原理及常见故障诊断

推土机传动系统的结构、原理及常见故障诊断摘要:我单位承修的推土机,是日本小松公司生产的。
整机传动系统由变矩器、变速箱、转向制动箱组成,在使用维修中常出现的故障有:没有行走、空挡带档、转向没有缓冲、制动解除不了等。
因结构复杂、工作原理难懂,给维修带来困难。
通过整理多年的维修记录、摸索探讨、分析总结推土机传动系统的结构特点、工作原理及常见故障诊断的检测、处理方法。
关键词:传动系统转向故障诊断测试引言:推土机传动系统由变矩器、变速箱、转向、制动部件组成。
在露天作业现场经常出现的没有行走、行走无力、没有空档、转向急没有缓冲、刹车制动不能解除等故障。
因结构紧凑复杂、工作原理难懂,拆装维修困难。
为此,本文简要介绍了该推土机传动系统的结构特点,摘录了维修实践中的典型故障,研究探讨了推土机传动系统常见故障的诊断过程,分享给大家。
1.传动系统简介推土机传动系统的原理是:发动机的功率经减震器对其进行扭震减震后,通过万向接头被传至变矩器。
变矩器根据负载变化将发动机功率通过油液递至变速箱输入轴。
变矩器上装有闭锁离合器,当变速箱转速加快时,闭锁离合器啮合。
此时传动箱与涡轮合为一体,将发动机功率直接传递给变速箱输入轴。
变速箱为行星式动力换挡变速箱。
利用行星齿轮系统与液压离合器的结合,完成减速和档位转换。
变速箱输出轴转速通过主动锥齿轮轴的小斜齿轮和被动斜齿轮后进一步减速降低,然后传递至左,右转向离合器。
操纵转向杆可使推土机将转向一侧的转向离合器分离,从而实现转向。
转弯半径的大小可通过安装在转向离合器外侧的转向制动器来联合控制。
转向制动器采用转向离合器同样的结构与液压控制系统。
转向离合器的功率输出进入终传动装置,经减速后带动驱动轮旋转。
终传动装置为双减速式,包括一个单级直齿轮和单级行星齿轮系统。
它通过使驱动轮转动来驱动履带板,从而使推土机移动。
1.1变矩器变矩器为单级、单相、三元件,带闭锁离合器定子离合器的液力变矩器。
其工作原理是:变矩器的传递动力由发动机—减震器—传动轴到变矩器输入轴—泵轮—涡轮—定子(导轮)—涡轮—涡轮轴。
行星式变速箱换挡原理
行星式变速箱换挡原理行星式变速箱是一种常见的汽车变速器类型,它通过一系列行星齿轮的组合来实现换挡的功能。
行星式变速箱由多个齿轮组成,其中包括行星齿轮、太阳齿轮和环齿轮。
这些齿轮之间的组合和运动方式使得汽车在不同速度和扭矩要求下能够实现平稳的换挡过程。
行星式变速箱的换挡原理可以用以下几个步骤来描述:第一步,离合器踏板踩下。
当驾驶员踩下离合器踏板时,离合器与发动机之间的连接断开,发动机的动力不再传递到变速箱。
第二步,选择换挡杆的位置。
驾驶员根据车速和行驶需求选择适当的换挡杆位置,即将换挡杆从一个齿轮位置移动到另一个齿轮位置。
第三步,选择对应的齿轮组合。
当换挡杆移动时,它会激活变速箱内部的机械装置,使得相关的齿轮组合参与到动力传输中。
第四步,行星齿轮组合。
行星齿轮是行星式变速箱的核心组件,它由太阳齿轮、行星齿轮和环齿轮组成。
当驾驶员选择一个新的齿轮位置时,行星齿轮组合会相应地进行调整,以实现不同的速度和扭矩传输。
第五步,动力传输。
一旦选择了新的齿轮组合,行星齿轮开始工作,将发动机的动力传输到车辆的驱动轮上。
在这个过程中,行星齿轮的运动和组合会根据换挡杆的位置和车辆的需求进行调整,以确保动力传输的平稳和高效。
通过这样的一系列步骤,行星式变速箱能够实现汽车的换挡功能。
它的设计和工作原理使得汽车在不同的行驶条件下能够保持平稳的动力输出,并且能够根据驾驶员的需求进行快速而准确的换挡。
总的来说,行星式变速箱是一种高效可靠的汽车变速器,它通过行星齿轮的组合和运动来实现换挡功能。
它的设计和工作原理使得汽车能够在不同的行驶条件下实现平稳的动力输出和快速的换挡过程。
对于驾驶员来说,了解行星式变速箱的换挡原理有助于更好地掌握汽车的操控和驾驶技巧。
同时,行星式变速箱的高效性和可靠性也为汽车提供了更好的性能和驾驶体验。
动力换挡变速箱研发生产方案(二)
动力换挡变速箱研发生产方案一、实施背景随着汽车工业的飞速发展,消费者对汽车的需求不再仅仅是基本的交通工具,而是追求更高的驾驶体验和效率。
动力换挡变速箱作为汽车核心部件之一,直接影响车辆的燃油经济性、动力性和驾驶舒适度。
近年来,中国政府大力推动汽车产业的转型升级,鼓励企业加强自主研发和技术创新。
因此,本方案旨在通过研发生产具有自主知识产权的动力换挡变速箱,提升国内汽车产业的核心竞争力。
二、工作原理动力换挡变速箱主要通过液力变矩器和行星齿轮机构实现动力传递和变速。
具体来说,液力变矩器由泵轮、涡轮和导轮组成,通过油液的循环流动传递发动机动力。
行星齿轮机构则由太阳轮、行星轮和齿圈组成,通过齿圈的变速转动实现不同挡位的输出。
在换挡过程中,液力变矩器的导轮与行星齿轮机构的太阳轮连接,实现动力的变速和传递。
通过调整导轮与太阳轮的连接关系,可实现前进挡、倒档和空档的切换。
三、实施计划步骤1.研发阶段:成立专门研发团队,进行液力变矩器和行星齿轮机构的设计和仿真分析。
同时进行控制系统软硬件的开发和测试。
2.样品制作阶段:根据研发成果,制作样机进行性能测试和验证。
对测试过程中发现的问题进行持续改进。
3.小批量试生产阶段:在确保样机性能达标的基础上,进行小批量试生产,进一步优化生产工艺和质量控制。
4.批量生产阶段:经过市场调研和评估,进行批量生产和销售。
同时建立完善的售后服务体系。
四、适用范围本产品适用于各类轿车、SUV和商用车等车型,可满足不同消费者的多样化需求。
通过自主研发和技术创新,本产品在性能和价格方面具有较强竞争优势,有望打破国外企业的市场垄断地位。
五、创新要点1.结构设计:通过对液力变矩器和行星齿轮机构的优化设计,实现更高效的能量传递和更佳的驾驶体验。
2.控制系统:采用先进的电子控制技术,实现变速箱的智能化控制,提高换挡平顺性和燃油经济性。
3.材料选择:选用高强度材料和耐磨涂层技术,提高变速箱的耐久性和可靠性。
行星排配齿设计计算

行星排配齿要求行星变速箱齿轮传动基本参数为齿轮模数m和齿圈节元直径Dr,设计时一般用统计和类比的方法确定。
为提高制造工艺性,变速箱行星齿轮传动部分所有齿轮采用同一模数,对于各行星排承受载荷的差异,则通过改变齿轮宽度来调整,以满足强度的要求。
行星动力换挡变速箱的配齿条件:(1)、同心条件为使太阳轮和齿圈旋转轴线重合,行星轮与太阳轮的中心距必须和行星轮和齿圈的中心距相等。
即保证:(2)、装配条件为使行星排各构件所受径向力平衡,各行星轮应均匀分布。
为此,各齿轮与行星轮个数q必须满足装配条件,否则,当第一个行星轮装入啮合位置后,其它几个齿轮装不进去,为此建立装配条件:其中,q和N都是整数,q为行星轮的个数。
所以可以将和之和分解因数,取其一个适当的因数为q。
(3)、相邻条件适当增加行星轮个数可以减小行星排传动时的齿间负荷,但如果行星轮个数太多,将会使得相邻行星齿轮的轮齿相互干涉。
因此,设计行星排时必须保证相邻行星轮齿顶间有一定间隙,现有结构中t至少为1到2。
当行星轮数时,一般间隙都足够;且时,一般。
此外都应用下式检验t值:式中为行星轮与太阳轮的中心距,为行星轮齿顶圆直径,。
行星排配齿结果对于本变速箱设计方案,其行星排的特征参数及配齿如下:(模数均为6)表9 各行星排齿数该配齿方案满足传动比条件、同心条件和装配条件。
各齿轮几何尺寸计算所用均为标准圆柱齿轮,模数,啮合角表10 行星排各齿轮参数171 1.638 四排太阳轮33 198 186.06 210 183 13.5相关计算公式:顶隙系数:齿顶高系数:分度圆直径:;基圆直径:;齿顶圆直径:外啮合:内啮合:;齿根圆直径:外啮合:内啮合:;全齿高:;齿根高:;齿顶高:外啮合内啮合:;中心距:齿顶圆压力角:重合度:。
行星式动力换档变速箱
适用范围有限
由于行星式动力换档变速 箱的成本和结构复杂度较 高,因此主要应用于高端 车型或专业用途换档变速箱适用于需要高性能和出色操控性的汽车,如跑车、赛车 等。
专业用途车辆
行星式动力换档变速箱适用于需要承载大扭矩和适应恶劣路况的专业用途车辆, 如越野车、重型卡车等。
行星式动力换档变速箱能够适应不同的驾 驶需求和路况,如城市道路、高速公路、 山区等,使车辆具有更好的适应性。
局限性
01
02
03
成本高
行星式动力换档变速箱的 结构复杂,制造成本较高, 因此车辆搭载该变速箱会 导致成本增加。
维修困难
由于行星式动力换档变速 箱的结构复杂,维修起来 相对困难,需要专业人员 和设备进行维修。
离合器机构
离合器机构是行星式动力换档变 速箱的重要组成部件之一,它负
责控制动力的传递和切断。
离合器机构包括主动片、从动片 和压盘等部件,通过压盘对主动 片和从动片的压紧或放松,实现
动力的传递或切断。
离合器机构的设计和性能直接影 响变速箱的性能和车辆的动力表
现。
操纵机构
操纵机构是行星式动力换档变速箱的 控制部分,它负责接收驾驶员的换档 指令,并控制离合器和齿轮机构的动 作,实现换档功能。
行星式动力换档变速箱
目录
• 行星式动力换档变速箱概述 • 行星式动力换档变速箱的组成 • 行星式动力换档变速箱的换档过程 • 行星式动力换档变速箱的优点与局限性 • 行星式动力换档变速箱的应用与未来发展
01 行星式动力换档变速箱概 述
定义与特点
定义
行星式动力换档变速箱是一种具 有变速、变向和变矩功能的传动 装置,广泛应用于各类机械和车 辆中。
04 行星式动力换档变速箱的 优点与局限性
拖拉机动力换挡变速箱和无级变速箱发展现状与趋势
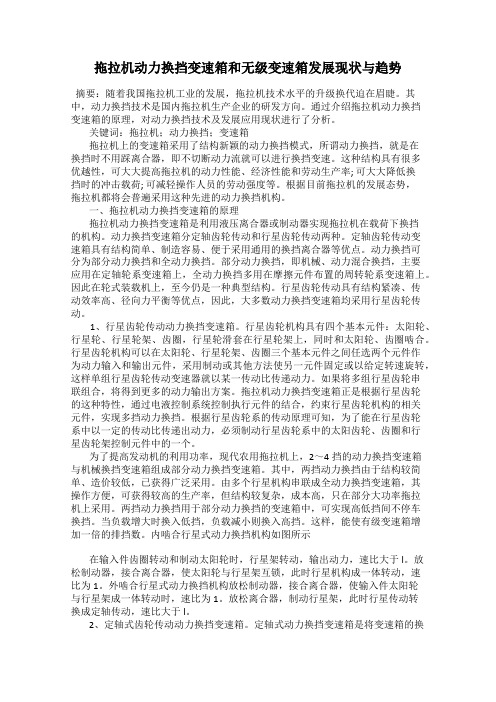
拖拉机动力换挡变速箱和无级变速箱发展现状与趋势摘要:随着我国拖拉机工业的发展,拖拉机技术水平的升级换代迫在眉睫。
其中,动力换挡技术是国内拖拉机生产企业的研发方向。
通过介绍拖拉机动力换挡变速箱的原理,对动力换挡技术及发展应用现状进行了分析。
关键词:拖拉机;动力换挡;变速箱拖拉机上的变速箱采用了结构新颖的动力换挡模式,所谓动力换挡,就是在换挡时不用踩离合器,即不切断动力流就可以进行换挡变速。
这种结构具有很多优越性,可大大提高拖拉机的动力性能、经济性能和劳动生产率; 可大大降低换挡时的冲击载荷; 可减轻操作人员的劳动强度等。
根据目前拖拉机的发展态势,拖拉机都将会普遍采用这种先进的动力换挡机构。
一、拖拉机动力换挡变速箱的原理拖拉机动力换挡变速箱是利用液压离合器或制动器实现拖拉机在载荷下换挡的机构。
动力换挡变速箱分定轴齿轮传动和行星齿轮传动两种。
定轴齿轮传动变速箱具有结构简单、制造容易、便于采用通用的换挡离合器等优点。
动力换挡可分为部分动力换挡和全动力换挡。
部分动力换挡,即机械、动力混合换挡,主要应用在定轴轮系变速箱上,全动力换挡多用在摩擦元件布置的周转轮系变速箱上。
因此在轮式装载机上,至今仍是一种典型结构。
行星齿轮传动具有结构紧凑、传动效率高、径向力平衡等优点,因此,大多数动力换挡变速箱均采用行星齿轮传动。
1、行星齿轮传动动力换挡变速箱。
行星齿轮机构具有四个基本元件:太阳轮、行星轮、行星轮架、齿圈,行星轮滑套在行星轮架上,同时和太阳轮、齿圈啮合。
行星齿轮机构可以在太阳轮、行星轮架、齿圈三个基本元件之间任选两个元件作为动力输入和输出元件,采用制动或其他方法使另一元件固定或以给定转速旋转,这样单组行星齿轮传动变速器就以某一传动比传递动力。
如果将多组行星齿轮串联组合,将得到更多的动力输出方案。
拖拉机动力换挡变速箱正是根据行星齿轮的这种特性,通过电液控制系统控制执行元件的结合,约束行星齿轮机构的相关元件,实现多挡动力换挡。
行星式变速箱换挡原理

行星式变速箱换挡原理
行星式变速箱是汽车传动系统中常见的一种变速箱结构。
它由太阳齿轮、行星齿轮、环形齿轮和多个离合器组成。
换挡原理是指在不同的离合器组合状态下,使得太阳齿轮、环形齿轮和行星齿轮相互作用形成不同的传动比,实现汽车的换挡。
在行星式变速箱中,太阳齿轮位于中间,环形齿轮位于最外层,行星齿轮则在太阳齿轮和环形齿轮之间。
排在一起的几个行星齿轮组成行星架,与太阳齿轮和环形齿轮相互啮合,构成变速箱的传动系统。
换挡时,根据不同的行星齿轮和离合器组合,可以使得太阳齿轮、行星齿轮和环形齿轮相互作用,从而实现不同的传动比。
因为变速箱的传动比与发动机输出的扭矩和车速等因素相关,所以采用行星式变速箱能够更好地满足汽车换挡的需求。
在行星式变速箱中,离合器扮演了重要的角色。
每个行星齿轮组都有一个对应的离合器组。
当一个离合器组脱开时,相应的行星齿轮便失效,变速箱就能实现相应的换挡。
行星式变速箱的换挡过程是由变速箱电脑控制的,在换挡时变速箱电脑通过操纵对应的离合器组的开闭状态,使得行星式变速箱能够在秒间完成换挡过程。
总的来说,行星式变速箱的换挡原理基于太阳齿轮、环形齿轮和行星
齿轮相互作用,通过控制离合器组使得不同的行星齿轮和离合器组合,实现汽车的换挡。
行星式变速箱因为其设计结构简单、精度高、齿轮
副数目多、传动比变化大等优点,成为现代汽车中最常见的变速箱类
型之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
挡位数 = 制动操纵件数 + 闭锁离合器数
4.(变速箱)传动比分析
挡位数 =传动比 = 制动操纵件数 + 闭锁离合器数
方法:基于(1)操纵一个操纵件就可得一个传动比,
(2)运动特性方程 转速分析目的是求各挡的传动比和各旋转构件在不同挡位时的转速。 求各基本元件的转速 ① 列出n个转速方程(以单行星为例), 设变速箱有n个行星排共3n个基本元件。
太阳轮t、齿圈q、行星架j 行星轮x
图4-17 简单行星排简图
因为:
(nt-nj) / (nx-nj) = Zx / Zt ; (nq-nj) / (nx-nj) = Zx / Zq
由行星排转速方程式4-12可见,行星排三个基本元件的转速中仅有两个是独立参数, 这表示行星排具有二个自由度。当某一元件固定后,则行星排变成一自由度系统, 即可由转速方程式4-12确定另外两元件的转速比(即行星排传动比)。这样,通过 将行星排三个基本元件分别作为固定件、主动件或从动件,则可组成八种方案(图418)。由式4-12不难求得这些方案的传动比。
第六节
1,2, 3,4,5,6,7
1,2,3,4,5,6,7
前F,R
后排1,2,3档
方案1:5个排。
方案2:4个排和1个离合器
1,
附件
附件
第七节.结构设计
变速器(油路系统)操纵机构:
1.手动液压换档 2.半自动 3.自动:电控自动换挡变速器 ;
行星齿轮变速器的换档执 行元件包括换挡离合器、 换挡制动器和单向离器。 换挡离合器为湿式多片离 合器,当液压使活塞把主 动片和从动片压紧时,离 合器接合;当工作液从活 塞缸排出时,回位弹簧使 活塞后退,使离合器分离。 换挡制动器通常有两种 形式:一种是湿式多片制 动器,其结构与湿式多片 离合器基本相同,不同之 处是制动器用于连接转动 件和变速器壳体,使转动 件不能转动。换挡制动器 的另一形式是外束式带式 制动器。 行星齿轮变速器的单向 离合器与液力变矩器中的 单向离合器结构相同。
式2 代入式1中, 求解得到: 各挡的传动比和各旋转构件的转速。
(2)
图4-20
自由度分析: 前排:4 排 X 3 - 6 个 连接条件( 后排: 1 个自由度。 所以 3 个自由度。( 1 排
)- 4 (4个排) = 2 个自由度。
X 3 - 1个连接条件- 4个排= 1个自由度)
T2
(4-19)
由以上方程可知, 行星排的三个基本元件转速之间有一个转速方程相连系, 故为一个二自由度机构。要使此机构中任意二个基本元件间 有确定的转速关系,必须再加一个关系式。 方程的三个系数之和等于零,故 nt nq n j 为其解, 即任意两个转速相等时第三个转速亦必和其他两个转速相等, 整个行星排成一体转动。(结构上形成一体的为一个旋转构件) (直接档)
第五节.结构设计
(1).齿轮传动设计;(2)。构件支撑及浮动件。 (3)。行星架;行星轮。(4)。箱的润滑油
1.齿轮传动设计
(1) m,Dq
(2)配齿条件
③ 相邻条件
④ 最小齿数 ⑤ 齿轮的变位
③ 相邻条件 为保证相邻行星轮齿顶不干涉并减少搅油损失, 一般使齿顶之间的问隙大于5~8mm。
双行星排5种方案
第三节.行星齿轮式变速箱 运动学 动力学分析
一 运动分析
(一)
nt n j nq n j
Zq Zt
(4-17)
Zq Zt
为行星排特性参数。
故对于单行星得三基本元件的转速关系式为:
对于单行星 对于双行星为:
nt nq (1 )n j 0
nt nq (1 )n j 0
方程组中符号下标1、2、…、n表示第几排行星排。 ② 列出连接方程(约束条件或约束方程)
q2 , qR , ( j2 , q1, , tR ), ( jR , j1 ), (t1, , t 2)
(1)
q2 , qR , ( j2 , q1, , tR ), ( jR , j1 ), (t1, , t 2)
图4-19
图4-20
1
2
R
2. 自由度分析
行星齿轮变速箱中,结构上 形成一体的为一个旋转构件, 如图4-19后组成中第一行星排 的行星架、第二行星排的齿圈 和第三行星排的太阳轮组成 q2 , qR , ( j2 , q1, , tR ), ( jR , j1 ), (t1, , t 2) 一个旋转构件。每一旋转构件 仅有一个自由度,而每一行星排 有一个转速方程,故每组行星机构的自由度为: y = 旋转构件数 m 一 行星排数 n 。 例如上图后组成的自由度: Y= 5 - 3 = 2。(旋转构件m=5, 即:q2 , qR , ( j2 , q1, , tR ), ( jR , j1 ), (t1, , t 2) 。括弧内为一个旋转构件。 3个转速方程,n=3)
④ 最小齿数 当α小于3时,行星排中太阳轮齿数最小。 当α大于3时,行星排中行星轮齿数最小。 最小齿数应避免根切并考虑轴和轴承的布置。一般行星轮 最小齿数 不小于14~17,太阳轮考虑到轴的尺寸最小齿数应取得更多 一些。
⑤ 齿轮的变位 为了凑传动比(n值)、避免根切和提高齿轮强度,可采用变位 齿轮
T5
5.扭矩分析(如给出输入扭矩)
方法 (1)列出各排扭矩方程; (2)列出扭矩连接方程; (3)求解
例题:
制动 T2, T5时
结构特点: 前排:制动T2时, 仅2排传动力。 后排:制动T5时, 4,5 排共同传动力。
公式1中M上标 A 表示:考虑效率时工况
制动T5时
6.循环功率
循环功率 Nu 的产生:
行星传动中,(1)牵连运动没有齿轮啮合摩檫功率损失; (2)相对运动中通过齿轮传递,有损失。 (3)固定件无能量损失,所以分别考虑t,j,q固定 时,。。 则:构件 t, q ,j 上的扭矩低于无损失情况。
分析已证实, 计及损失与未考虑时,构件 t, q ,j 扭矩表达式相同。
有表可查
第四节.变速箱分析(多行星排分析)
液力机械传动式自动变速器的控制
液压自动操纵系统 通常由供油、手动选挡、参数调节、换挡时刻控制、换档品质控制等部分组成。 供油部分 根据节气门开度和选挡杆位置的变化,将油泵输出油压调节至规定值,形成稳定 的工作液压。 在液控液动自动变速器中,参数调节部分主要有节气门压力调节阀(简称节气 门阀)和速控调压阀(又称调速器)。节气门压力调节阀使输出液压的大小能够 反映节气门开度;速控调压阀使输出液压的大小能够反映车速的大小。 换挡时刻控制部分用于转换通向各换挡执行机构(离合器和制动器)的油路,从 而实现换挡控制。 锁定信号阀受电磁阀的控制,使液力变矩器内的锁止离合器适时地接合与分离。 换挡品质控制部分的作用是使换挡过程更加平稳柔和。
单排:Mu = Mq,nu = nq; 计算 : Nu = Mu . nu ;
双排: Mu = Mq1 = Mt2, nu = nq1 = Mt2
摩檫离合器动力换挡变速箱的缺点就在于它的功率损失。两套行星齿轮输出四
个速度,也就需要四个离合器。名义上,有两个离合器要分离,但这会造成部分磨擦损 耗。在复杂的行星变速箱上,这些损耗,再加上那些因大量齿轮空转而造成的损耗,还 是比较大的。
(二)复杂行星排运动分析- 各构件t, j, q的转速及转动比
倒4档
二 动力学
1 转矩分析(动力学)各构件t, j, q的转矩 不考虑摩擦,等速运动时,行星排中行星轮对太阳轮、齿圈、 行星架作用的转矩称为理论内转矩, 由行星排三转矩之和等于零,得:
Tj Tt Tq 0
Tt Tq
制动器
第二节. 简单行星排(单,双行星排)
如图4-17所示,简单行星排是由太阳轮t、齿圈q、行星架j和行星轮x组成。由于行星轮 轴线旋转与外界连接困难,故在行星排中只有太阳轮t、齿圈q和行星架j等三个元件能 与外界连接,并称之为基本元件。在行星排传递运动过程中,行星轮只起到传递运动的 隋轮作用,对传动比无直接关系。(行星轮的转速,受力。。。。。)
T j Tt Tq Tt (1 )
Tj (1 )
(4-21)
(4-20)
得单行星行星排理论内转矩关系式:
对双行星可用类似方法求得理论内转矩关系式: Tq Tj Tt (4-22) ( 1)
2。行星传动的能量损失—传动效率
注:(诸上册165-168)
,一个简单行星排可以给出八种传动方案,但其传动比 数值因受特性参数值的限制,尚不能满足机械的要求,因此,行星 变速箱通常是由几个行星排组合而成,以便得到所需的传动比。如; 两个行星排;几个行星排组合成变速箱。
例: 分析:两个行星排:t1, j1, q1; t2, j2, q2; t1 = t2 ;j1 = q2 ;(两组构件连接); 余下:t1 = ni, j2 = no ; q1制动: nq1 = 0 Ni 输入(已知); 总计 1, 2;两个自由度,对应俩方程。(转速方程)
2。构件支撑及浮动件。 3。行星架;行星轮。 4。箱的润滑油
附件:齿轮变位系数的选择原则
采用变位齿轮的原因:1)配凑中心距;2)提高齿轮的强度和使用寿命; 3)降低齿轮的啮合噪声。 变位齿轮主要有两类:高度变位和角度变位。高度变位齿轮副的一对 啮合齿轮的变位系数之和等于零。高度变位可增加小齿轮的齿根强度,使 它达到和大齿轮强度接近的程度。角度变位系数之和不等于零。角度变位 可获得良好的啮合性能及传动质量指标,故采用得较多。 变位系数的选择原则 : 1)对于高挡齿轮,应按保证最大接触强度和抗胶合及耐磨损最有利的 原则选择变位系数。 2)对于低挡齿轮,为提高小齿轮的齿根强度,应根据危险断面齿厚相 等的条件来选择大、小齿轮的变位系数。 3)总变位系数越小,齿轮齿根抗弯强度越低。但易于吸收冲击振动, 噪声要小一些。 为了降低噪声,对于变速器中除去一、二挡以外的其它各挡齿轮的总 变位系数要选用较小一些的数值。一般情况下,随着挡位的降低,总变位 系数应该逐挡增大。一、二挡和倒挡齿轮,应该选用较大的值。