无线遥控设计
无线遥控车控制系统设计资料
无线遥控车控制系统设计资料一、引言二、设计原理遥控器手柄通过操纵杆、按键等输入信号获取用户的操作指令,并将指令转化为数字信号输出。
无线信号传输模块将数字信号通过无线方式发送到车载控制主板。
车载控制主板接收到信号后,解码操作指令,并控制车辆的电机、舵机等部件实现相应的动作。
三、硬件组成1.遥控器手柄:包括操纵杆、按键和显示屏等组件。
操纵杆用于控制车辆前进、后退、转向等动作;按键用于实现其他功能,如灯光控制、声音控制等;显示屏用于显示当前车辆状态等信息。
2.无线信号传输模块:一般采用蓝牙、射频、红外等通信方式,将遥控指令传输到车载控制主板。
3.车载控制主板:负责接收和解码无线信号,并控制车辆运动。
主板上包括处理器、电机控制芯片、舵机控制芯片等组件。
4.无线信号接收模块:用于接收来自遥控器的无线信号,并传递给车载控制主板。
四、软件设计软件设计是无线遥控车控制系统不可或缺的一部分。
主要包括遥控指令解码算法、车辆控制算法和用户界面设计。
1.遥控指令解码算法:根据不同的无线信号传输模块,设计对应的解码算法,将接收到的数字信号解码为具体的操作指令。
2.车辆控制算法:根据接收到的操作指令,设计控制车辆运动的算法。
通过控制电机、舵机等部件的转动,实现车辆的前进、后退、转向等动作。
3.用户界面设计:在遥控器手柄上设计友好的用户界面,通过显示屏等方式向用户展示车辆状态、当前操作指令等信息。
五、总结无线遥控车控制系统是一种通过无线信号控制车辆运动的系统,由遥控器手柄、无线信号传输模块、车载控制主板和无线信号接收模块组成。
软件设计包括遥控指令解码算法、车辆控制算法和用户界面设计。
这种系统在无人驾驶车辆、航拍无人机等领域具有广泛的应用前景。
简易无线电遥控系统设计报告

简易无线电遥控系统设计报告一、设计任务:设计并制作无线电遥控发射机和接收机。
一、无线电遥控发射机。
图1.1 无线电遥控发射机二、无线电遥控接收机。
图1.2 无线电遥控接收机3、要求。
(1)工作频率:fo=6~10MHz中任选一种频率。
(2)调制方式:AM、FM或FSK……任选一种。
(3)输出功率:不大于20mW(在标准75Ω假负载上)。
(4)遥控对象:8个。
(5)接收机距离发射机不小于10m。
(6)增加信道抗干扰方法。
(7)尽可能降低电源功耗。
二、系统方案设计。
整个系统由发射系统和接收操纵系统两部份组成。
发射系统和接收操纵系统组成结构框图如图1.1和1.2所示。
系统的工作原理是第一通过按键编址电路输入所需操纵电路的位号,同时启动编码电路产生带有地址编码信息和开关状态信息的编码脉冲信号,再通过无线电发射电路将该信号发射出去。
而无线电接收电路将接收到的编码脉冲信号通过解码电路进行编码地址确认,确认是不是为本遥控开关系统地址,然后通过驱动电路来驱动8个遥控对象。
1、发射机。
图2.1 无线电遥控发射机1.1 调制方式的选择。
依照要求,操纵对象是8盏灯,被控状态采纳二进制编码。
因设计对频带宽度没有限制,为了提高抗干扰能力,实现方式简单,载波传输采纳FSK调制方式。
图2.2 FSK示用意FSK(Frequency-shift keying)- 频移键控是利用载波的频率转变来传递数字信息,最多见的FSK是用两个频率承载二进制1和0的双频FSK系统,如图2.2所示。
产生FSK 信号最简单的方式是依照输入的数据比特是0仍是1,在两个独立的振荡器中切换,如图2.3所示。
采纳这种方式产生的波形在切换的时刻相位是不持续的,因此这种FSK 信号称为不持续FSK 信号。
图2.3 非持续相位FSK的调制方式由于相位的不持续会造频谱扩展,这种FSK 的调制方式在传统的通信设备中采纳较多。
随着数字处置技术的不断进展,愈来愈多地采纳连继相位FSK调制技术。
51单片机无线遥控小车设计
51单片机无线遥控小车设计一、引言无线遥控小车是一种基于51单片机的智能小车系统,它利用无线通信技术实现了对小车的遥控。
通过无线遥控,我们可以随时控制小车的方向,实现室内或者室外的移动。
本设计将详细介绍51单片机无线遥控小车的整体设计框架、电路连接和关键模块设计。
二、整体设计框架整个系统分为遥控器端和小车端两个部分。
遥控器端通过按键或者摇杆输入控制指令,经过编码和解码处理后,通过无线传输模块将指令发送给小车端。
小车端接收到指令后,通过解码和控制模块来控制小车的运动。
三、电路连接遥控器端由单片机、按键(或者摇杆)、编码芯片和无线传输模块组成。
按键用于输入控制指令,编码芯片用于将按键输入的模拟信号转换为数字信号,单片机将数字信号进行编码后发送给无线传输模块,最终通过无线通信将指令传输给小车端。
小车端由单片机、解码芯片、电机驱动、电机和无线接收模块组成。
无线接收模块用于接收遥控器端发送过来的指令,解码芯片将数字信号转换为控制信号,单片机根据控制信号来控制电机驱动,从而实现小车的运动。
四、关键模块设计1.编码和解码模块设计编码和解码模块是整个系统中的关键部分,它负责将模拟信号转换为数字信号,并将数字信号转换为控制信号。
2.无线传输模块选择无线传输模块是实现遥控通信的关键组件,我们可以选择使用蓝牙模块、无线射频模块等。
选择合适的无线传输模块需要考虑通信距离、通信速率、功耗等因素。
3.电机驱动模块设计电机驱动模块负责将控制信号转换为电机运动控制信号,驱动电机完成小车的移动。
在设计电机驱动模块时,需要考虑电机的类型和电机驱动电路的选型。
五、总结本设计详细介绍了51单片机无线遥控小车的整体设计框架,电路连接和关键模块设计。
通过对整个设计的理解和实现,我们可以实现对小车的远程遥控,从而实现室内或者室外的自动移动。
这种无线遥控小车系统在娱乐、智能家居、无人巡检等领域都有广泛的应用前景。
无线遥控自动窗帘的设计

自动窗帘的设计摘要本设计首先阐述了自动窗帘的基本构成及特点,然后通过对无线遥控控制方式,手动控制方式,光控控制方式的对比论证,根据控制要求,本设计选用了无线遥控和手动控制方式控制电机的正反转。
通过对系统的总体设计、硬件和软件控制设计,满足了系统方案的要求。
在硬件方面,本文着重对单片机、无线接收模块J04V、无线发射模块F05P、直流电机驱动芯片L298N、三端集成稳压器KA7810等选型进行了设计,同时给出了各高级单元的使用及设定情况;在软件方面,提供了原理图、系统工作流程图和指令表。
除此之外,也充分考虑了实际应用中的要求,设计时考虑到了成本、功耗、安全性、稳定性、抗干扰性等诸多问题,具有一定的合理性和可行性。
关键词AT89S51单片机/直流电机驱动芯片L298N/无线接收模块J04V/无线发射模块F05P/三端固定集成稳压器KA7810/IThe Design of the automatic curtainABSTRACTFirst of all, the design of the automatic curtains on the basic structure and characteristics, and then through constant pressure on the wireless remote control way, manual control way, light control way of argumentation contrast, under the control requirements, many of the design selected the wireless remote control way and manual control way. Through the system design, hardware and software control design to meet the requirements of the system.In terms of hardware, this article focuses on microcontroller, the wireless receiver module J04V, the wireless transmitter module F05P, the DC motor driver IC L298N, the three-terminal integrated voltage regulator KA7810, such as selection of a design, all at the same time give the use of advanced units and set up the situation; In terms of software, provides a schematic diagram, the system flow chart and the instruction list . In addition, it fully takes into account the requirements of practical applications, the design takes into account the cost, power, security, stability, and many other questions of sexual interference with a certain degree of rationality and feasibilityKEY WORDS AT89S51 Single-Chip Microcomputer / the DC motor driver IC L298N / the wireless receiver module J04V / the wireless transmittermodule F05P / the three-terminal integrated voltage regulatorKA7810II目录中文摘要 (I)英文摘要 (II)1概述 (1)1.1选题意义 (1)1.2窗帘无线遥控器完成的功能 (2)2总体设计方案 (4)3 AT89S51单片机概述 (5)3.1AT89S51单片机简介 (5)3.2AT89S51单片机的硬件结构及引脚 (5)3.2.1 AT89S51单片机的内部结构 (5)3.2.2 AT89S51单片机的外部引脚 (7)3.2.3 AT89S51单片机的时钟电路及时钟信号 (8)3.2.4 AT89S51单片机的复位电路 (9)3.3AT89S51单片机最小系统简介 (9)4 无线收发电路 (11)4.1无线接收模块J04V (11)4.2无线发射模块F05P (15)4.3PT2262/PT2272编码解码芯片 (19)4.3.1 PT2262/PT2272特点及引用范围 (19)4.3.2 PT2262 (20)4.3.3 PT2272 (22)4.3.4 PT2262/PT2272芯片的地址编码设定和修改 (23)5 直流电机驱动电路 (24)5.1L298N芯片 (24)5.2直流电机驱动电路 (27)6 直流稳压电源 (29)6.1三端固定集成稳压器工作原理 (29)6.2三端固定集成稳压器应用注意事项 (31)6.3直流稳压电源模块的设计 (33)7 软件设计 (34)7.1系统流程图 (34)7.2源程序 (35)8 焊接与调试 (36)8.1焊接技术 (36)8.1.1 焊接方法 (36)8.1.2 注意事项 (37)8.2安装调试 (38)9 总结 (39)致谢 (40)参考文献 (40)(附录) (42)附录1:硬件电路 (42)附录2:程序 (43)附录3:元器件清单 (46)附录4:实作图片 (47)1概述1.1选题意义随着社会信息化的加快,人们的工作、生活和通讯、信息的关系日益紧密。
无线遥控智能小车的设计pdf
引言概述:无线遥控智能小车的设计是一个将无线通信和智能控制技术相结合的项目。
该设计通过无线遥控来控制小车的行动,同时通过智能控制算法使其能够自动避障和巡航等功能。
本文将详细介绍无线遥控智能小车设计的各个方面,包括硬件设计、软件设计、通信技术选择、避障和巡航算法实现等内容。
正文内容:一、硬件设计1.主控单元选型:介绍主控单元选择的几个关键因素,如处理能力、通信能力、外设接口等,并给出推荐的主控单元选型。
2.动力系统设计:阐述小车动力系统的设计原理和选用电机的考虑因素,以及电路设计和电源系统设计。
3.传感器选择与接口设计:分析选择适合的传感器,并详细介绍传感器的接口设计。
4.无线通信模块设计:介绍无线通信模块的选择和设计,包括通信协议选择、通信距离和通信速率等。
5.外观设计:介绍小车外观设计的几个关键方面,包括外壳材料的选择、外形设计和装饰等。
二、软件设计1.控制系统架构设计:介绍控制系统的总体架构设计,包括遥控控制和自动控制模式的切换设计。
2.无线通信协议的实现:分析选择适合的无线通信协议,并详细介绍协议的实现原理和通信流程。
3.遥控控制算法设计:介绍遥控模式下的控制算法设计,包括信号解析、指令发送和驱动控制等。
4.自动控制算法设计:介绍自动控制模式下的控制算法设计,包括避障算法、巡航算法和路径规划等。
5.图形界面设计:详细介绍图形界面设计的几个关键方面,包括界面布局、控件设计和交互设计等。
三、通信技术选择1.无线通信技术的分类:分析无线通信技术的分类,并比较它们的优缺点,为后续的技术选择提供依据。
2.无线通信技术选择标准:介绍无线通信技术选择的一些标准,包括通信距离、通信速率、抗干扰能力等。
3.无线通信技术比较:对几种常见的无线通信技术进行比较,包括蓝牙、Wi-Fi、红外线等,分析其适用场景和应用范围。
4.无线通信技术的实现:详细介绍选择的无线通信技术的实现原理和通信协议。
5.无线通信技术的未来发展:展望无线通信技术的未来发展趋势,分析其在智能小车设计中的应用前景。
(完整版)无线遥控解析与设计毕业设计
盐城工业职业技术学院2015届毕业设计(论文)题目无线遥控解析与设计专业现代纺织技术学号姓名指导老师日期2014年12月摘要本设计是研究无线遥控中红外遥控和无线电遥控。
研究设计有三项内容,第一项为红外遥控LED灯系统的研究,第二项为无线电遥控小车的研究,第三项是无线电遥控日光灯开关的研究。
三项研究内容都为无线遥控,遥控系统通常是两个部分组成,即遥控发射器和遥控接收控制器。
我们将分别对三个遥控系统的遥控发射和遥控接收控制的组成和工作原理进行解析,让大家能够深入全面的认识无线遥控的工作原理。
同时,最后将对红外遥控LED灯和无线电遥控日光灯进行接线通电进行遥控演示。
关键词:无线电遥控红外线遥控发射器AbstractThis design is the study of the infrared remote control and wireless remote control radio remote control. There are three elements of the study design, the first to study the infrared remote control LED light system, and the second term for the study of radio-controlled car, and the third is the study of radio-controlled fluorescent switch. Three studies content for wireless remote control, remote control systems usually consist of two parts, namely remote control transmitter and remote receiver controller. We were on the composition and working principle of the three remote control transmitter and remote control remote control system receives resolved, so that we can go to a comprehensive understanding of the wireless remote control works. Meanwhile, the last an infrared remote control LED lights and fluorescent wiring powered radio-controlled remote control demonstration.Keywords: radio remote control infrared remote control transmitter目录第一章绪论 (1)1.1研究目的 (1)1.2研究现状 (1)1.3研究内容 (2)第二章红外遥控LED灯控制板 (4)2.1 红外遥控发射器的组成 (4)2.1.1键位码的产生 (4)2.1.2指令编码器 (5)2.1.3码元调制与红外光发射 (6)2.2 红外遥控发射器的工作原理 (6)2.3红外遥控接收控制板的组成 (7)2.3.1红外接收头 (7)2.3.2解码 (8)2.3.3晶振电路 (9)2.3.4单片机 (11)2.4红外遥控接收控制器的工作原理 (14)2.5使用方法 (15)第三章无线电遥控汽车控制板 (17)3.1无线电基本介绍 (17)3.1.1无线电的组成 (17)3.1.2无线电的特点及应用 (17)3.2红外遥控与无线电遥控的区别 (18)3.3无线遥控发射控制板组成及工作原理 (19)3.4无线遥控接收控制板组成及工作原理 (22)3.5使用方法 (26)第四章无线电遥控日光灯控制板 (27)4.1发射控制板组成及工作原理 (27)4.2接收控制板组成及工作原理 (27)4.3使用方法 (29)第五章总结 (32)参考文献 (34)致谢 (36)第一章绪论1.1研究目的随着无线遥控在现实生活中越来越多的应用,改变了许多生活中的常态,给人们带来了极大的便利。
桁车无线自动遥控装置的设计2
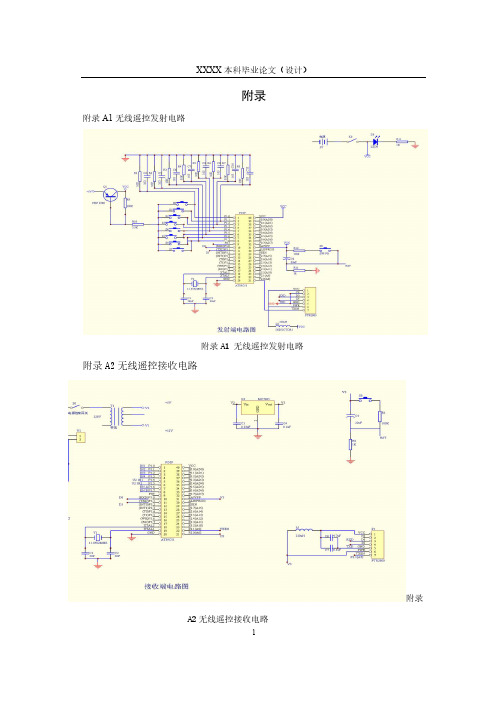
1附录附录A1无线遥控发射电路附录A1 无线遥控发射电路附录A2无线遥控接收电路附录A2无线遥控接收电路2附录A3电机驱动电路图附录A3直流电机驱动电路A4 发射端PCBPCBA5接收端接收部分PCB图A6电机控制部分原理图3电机控制部分PCB图4A6 程序清单发送部分程序:#include<reg51.h>#include<PTR2000.h>#define uchar unsigned char#define uint unsigned intsbit dong=P1^0;sbit xi=P1^1;sbit nan=P1^2;sbit bei=P1^3;sbit sheng=P1^4;sbit jiang=P1^5;sbit ting=P1^6;sbit kai=P1^7;sbit D0=P2^0;main ();bit send_flag=0;uint gvalue=0;uint sum=0;uint time=0;uint Data[10]={0x0a,0x09,0,0,0,0,0,0,0,0x0f}; void init_timer(void);void Init(void);void ScanKey(void);void send_data(void);//主函数void main()5{Init();while(1){ScanKey();send_data();}}// 定时器初始化、数据初始化void init_timer(void){TMOD=0x01;TH0=0x3c;TL0=0xb0;ET0=1;TR0=1;EA=1;}void Init(void){init_timer();dong=0;xi=0;nan=0;bei=0;sheng=0;jiang=0;ting=0;6kai=0;}//按键扫描void ScanKey(void){if(dong==1){Data[2]=0x0b;gvalue=0011;}if(xi==1){Data[2]=0x0c;gvalue=0101;}if(nan==1){Data[2]=0x0d;gvalue=0110;}if(bei==1){Data[2]=0x0e;gvalue=1001;}if(sheng==1){Data[2]=0x05;7gvalue=1010;}if(jiang==1){Data[2]=0x07;gvalue=1100;}if(ting==1){Data[2]=0x0a;gvalue=1010;}if(kai==1){Data[2]=0x09;gvalue=1010;}}//发送数据帧的组装zu_data(uint gvalue){uint i=0,swei=0;for(i=6;i>=3;i--){swei=gvalue%10;Data[i]=swei;gvalue=gvalue/10;8}for(i=0;i<7;i++){sum=sum+Data[i];}for(i=8;i>=7;i--){Data[i]=sum%10;sum=sum/10;}sum=0;}//发送数据void send_data(void){uint u;if(send_flag==1){EA=0;if(!(gvalue==0)){zu_data(gvalue);if(u<10){D0=Data[u]/2;Ds=Data[u]/4;D1=Data[u]/8;D2=Data[u]/16;9D3=Data[u]/32;u++;}else{u=0;gvalue=0;}}send_flag=0;EA=1;}}//定时中断void timer_0() interrupt 1{TH0=0x3c;TL0=0xb0;time++;if(time==4){time=0;send_flag=1;}}10接收部分程序:#include<reg51.h>#include<ptr2000.h>#define uchar unsigned char#define uint unsigned intsbit D0=P2^0;sbit Ds=P2^1;sbit D3=P0^3;sbit ENA=P1^6;sbit ENB=P1^7;sbit IN1=P1^0;sbit IN2=P1^1;sbit IN3=P1^2;sbit IN4=P1^3;sbit U2 IN1=P1^4;sbit U2 IN4=P1^5;bitdong_flag,xi_flag,nan_flag,bei_flag,sheng_flag,jiang_flag,ting_flag, kai_flag,;uint Rec[10]={0};uint flag=0;uint sum=0;uint t;uint pwm_num=0;uint time_num=0;void Init(void);void receive_data(void);void manage_data(void);11void CarAction(void);void main(){Init();while(!ting_flag){receive_data();manage_data();CarAction();}}void init_timer(void){TMOD=0x12;TL0=0x38;ET0=1;TR0=1;TH1=0x3c;TL1=0xb0;ET1=1;TR1=1;EA=1;}void Init(void){init_timer();dong _flag=0;xi _flag=0;12nan _flag=0;bei_flag=0;sheng_flag=0;jiang_flag=0;ting_flag=0;kai_flag=0;ENA=1;ENB=1;}//接收数据void receive_data(void){uint D_sum=0;uint D0_data=0;uint Ds_data=0;D0_data=D0;Ds_data=D1;D_sum=D0_data+Ds_data*2;if(D_sum==0x000a){flag=1;t=0;}if(flag==1){Rec[t++]=D_sum;flag=1;13}if(Rec[t]==0x0f){flag=0;t=0;}}//数据处理void manage_data(void){uint i;sum=0;for(i=0;i<7;i++){sum=sum+Rec[i];}if((sum==(Rec[7]*10+Rec[8]))&Rec[9]==0x0f) {sum=0;switch(Rec[2]){case 0x0b:dong_flag=1;break;case 0x0c:xi_flag=1;break;case 0x0d:14nan_flag=1;break;case 0x0e:bei_flag=1;break;case 0x05:sheng_flag=1;break;case 0x07:jiang_flag=1;break;case 0x07:ting_flag=1;break;case 0x07:kai_flag=1;break;}}}//小车运动void CarAction(void){if(dong_flag==1){IN2=0;15IN3=0;if(pwm_num==20){IN1=1;IN4=1;}if(pwm_num==100){IN1=0;IN4=0;pwm_num=0;}}if(xi_flag==1){IN1=0;IN4=0;if(pwm_num==70){IN2=1;IN3=1;}if(pwm_num==100){IN2=0;IN3=0;pwm_num=0;}16}if(nan_flag==1){IN2=0;IN3=0;if(pwm_num==20){IN4=1;}if(pwm_num==50){IN1=1;}if(pwm_num==100){IN1=0;IN4=0;pwm_num=0;}}if(sheng_flag==1){IN2=0;IN3=0;if(pwm_num==20){IN1=1;}17if(pwm_num==50){IN4=1;}if(pwm_num==100){IN1=0;IN4=0;pwm_num=0;}if(jiang_flag==1){IN2=0;IN3=0;if(pwm_num==20){IN1=1;}if(pwm_num==50){IN4=1;}if(pwm_num==100){IN1=0;IN4=0;pwm_num=0;}18if(ting_flag==1){IN2=0;IN3=0;if(pwm_num==20){IN1=1;}if(pwm_num==50){IN4=1;}if(pwm_num==100){IN1=0;IN4=0;pwm_num=0;}if(bei_flag==1){IN2=0;IN3=0;if(pwm_num==20){IN1=1;}if(pwm_num==50){19IN4=1;}if(pwm_num==100){IN1=0;IN4=0;pwm_num=0;}}void timer_1() interrupt 3{TH0=0x3c;TL0=0xb0;time_num++;if(time_num==4){dong_num=0;xi_flag=0;nan_flag=0;bei_flag=0;sheng_flag=0;jiang_flag=0;sting_flag=0;}}20。
智能键盘无线遥控电路的设计
智能键盘无线遥控电路的设计
1 智能键盘无线遥控电路
智能仪器仪表使用场合的环境比较复杂、干扰较大,用红外线遥控方式是有困难的,此时若采用无线电遥控就显得比较方便。
本文介绍的简单的智能键盘无线遥控电路可以实现上述要求,它具有电路结构简单、信号传输可靠的优点。
电路方框图如图1所示。
遥控开关的数量与智能仪器仪表的功能键一一对应。
这些开关与编码器的数据控制输出引脚相连,通过发射/接收电路(发射/接收地址编码信号),使配对的解码器的数据控制输出引脚输出与对应的开关相一致的电平,该电平作为驱动信号,由单片机进行检测,然后执行相应功能键。
无线遥控实验报告
一、实验背景随着科技的不断发展,无线通信技术得到了广泛应用。
无线遥控技术作为一种典型的无线通信技术,在智能家居、远程控制、工业自动化等领域具有广泛的应用前景。
本实验旨在设计一个简易的无线遥控系统,实现对指定设备的远程控制。
二、实验目的1. 了解无线遥控系统的基本原理和组成;2. 掌握无线遥控系统的设计与实现方法;3. 学会使用无线通信模块进行数据传输;4. 熟悉嵌入式系统编程与调试。
三、实验原理无线遥控系统主要由发射模块、接收模块和执行模块组成。
发射模块负责将控制信号通过无线方式发送出去;接收模块负责接收来自发射模块的信号,并将其转换为控制指令;执行模块根据接收到的指令执行相应的动作。
本实验采用无线射频(RF)技术实现无线遥控。
RF技术利用射频信号在空间传播,将信息从发射端传输到接收端。
本实验选用RF433MHz无线通信模块,该模块具有成本低、传输距离远、抗干扰能力强等优点。
四、实验器材1. 无线射频模块(RF433MHz);2. 单片机(如Arduino);3. 执行模块(如舵机、继电器等);4. 电源;5. 连接线;6. 开发板(如Arduino板);7. 编程软件(如Arduino IDE)。
五、实验步骤1. 设计无线遥控系统硬件电路图;2. 编写单片机程序,实现数据采集、处理和无线传输;3. 编写执行模块程序,实现控制指令的执行;4. 连接硬件电路,调试程序;5. 测试无线遥控系统的性能。
六、实验内容1. 设计无线遥控系统硬件电路图根据实验要求,设计无线遥控系统硬件电路图,包括单片机、无线射频模块、执行模块等。
电路图如下:```+---------+| MCU |+---------+| || |V V+---------+ +---------+| RF | | 执行 || 模块 |----| 模块 |+---------+ +---------+```2. 编写单片机程序使用Arduino IDE编写单片机程序,实现数据采集、处理和无线传输。
智慧矿山无线遥控系统设置设计方案
智慧矿山无线遥控系统设置设计方案智慧矿山无线遥控系统是一种基于无线通信技术的遥控系统,旨在提高矿山设备和工作环境的安全性和效率。
下面是一份智慧矿山无线遥控系统的设计方案,包括系统架构、遥控手柄设计、无线通信模块选择等。
一、系统架构设计智慧矿山无线遥控系统主要由遥控手柄、无线通信模块和控制中心三部分组成。
1. 遥控手柄:遥控手柄是用户和矿山设备之间的接口,用于控制设备的开关、方向等操作。
遥控手柄采用无线通信技术与控制中心进行数据传输。
2. 无线通信模块:无线通信模块负责将遥控手柄发送的信号传输到控制中心,并将控制中心发送的指令传输到遥控手柄。
无线通信模块可以选择使用无线局域网(Wi-Fi)、蓝牙或者射频通信等技术。
3. 控制中心:控制中心是矿山设备的主要控制单元,负责接收并处理遥控手柄发送的指令,并通过有线或者无线方式控制矿山设备的运行。
二、遥控手柄设计1. 外观设计:遥控手柄应具备舒适的手感和易于操作的按钮,同时具备防水、防尘和抗震的特性,以适应矿山环境的特殊需求。
2. 按钮和指示灯设计:遥控手柄上的按钮数量和布局应根据设备的操作需求进行设计,并配备明确的指示灯,以方便用户了解指令的执行情况。
3. 电源管理:遥控手柄应配备可充电电池,并具备低功耗设计,以延长使用时间;同时,遥控手柄应配备电池电量指示灯,提醒用户进行及时充电。
三、无线通信模块选择1. Wi-Fi模块:Wi-Fi模块具有较高的传输速率和稳定性,适用于大范围覆盖和高速数据传输的场景。
但在矿山环境中,信号受限于地质条件和设备的位置等因素,可能存在信号弱或者信号不稳定的问题。
2. 蓝牙模块:蓝牙模块具有低功耗和较短的传输距离特点,适用于小范围内的数据传输。
在矿山环境中,蓝牙模块的传输距离可能受到隧道、建筑物等障碍物的限制。
3. 射频通信模块:射频通信模块具有传输距离长、穿透力强的特点,适用于室内外不确定的数据传输场景。
在矿山环境中,射频通信模块可以通过信号中继等方式克服障碍物对信号传输的限制。
简易无线遥控发射接收设计-315M遥控电路
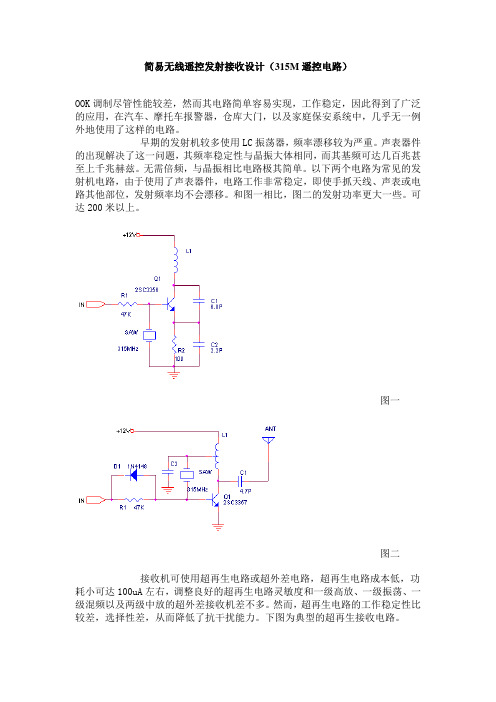
简易无线遥控发射接收设计(315M遥控电路)OOK调制尽管性能较差,然而其电路简单容易实现,工作稳定,因此得到了广泛的应用,在汽车、摩托车报警器,仓库大门,以及家庭保安系统中,几乎无一例外地使用了这样的电路。
早期的发射机较多使用LC振荡器,频率漂移较为严重。
声表器件的出现解决了这一问题,其频率稳定性与晶振大体相同,而其基频可达几百兆甚至上千兆赫兹。
无需倍频,与晶振相比电路极其简单。
以下两个电路为常见的发射机电路,由于使用了声表器件,电路工作非常稳定,即使手抓天线、声表或电路其他部位,发射频率均不会漂移。
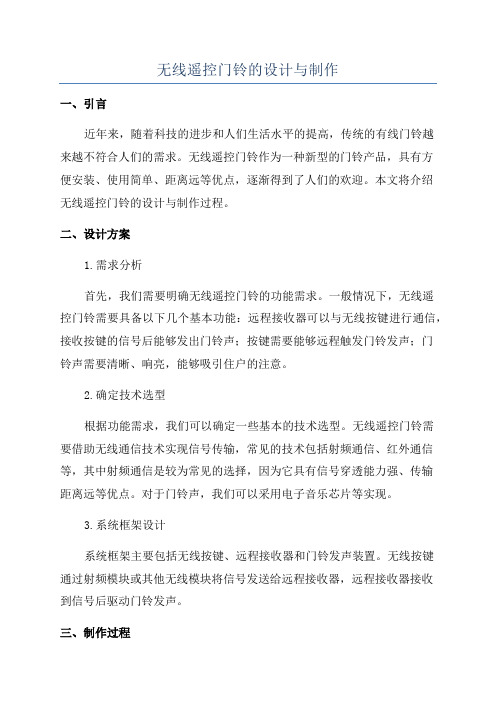
和图一相比,图二的发射功率更大一些。
可达200米以上。
图一图二接收机可使用超再生电路或超外差电路,超再生电路成本低,功耗小可达100uA左右,调整良好的超再生电路灵敏度和一级高放、一级振荡、一级混频以及两级中放的超外差接收机差不多。
然而,超再生电路的工作稳定性比较差,选择性差,从而降低了抗干扰能力。
下图为典型的超再生接收电路。
超外差电路的灵敏度和选择性都可以做得很好,美国Micrel公司推出的单片集成电路可完成接收及解调,其MICRF002为MICRF001的改进型,与MICRF001相比,功耗更低,并具有电源关断控制端。
MICRF002性能稳定,使用非常简单。
与超再生产电路相比,缺点是成本偏高(RMB35元)。
下面为其管脚排列及推荐电路。
ICRF002使用陶瓷谐振器,换用不同的谐振器,接收频率可覆盖300-440MHz。
MICRF002具有两种工作模式:扫描模式和固定模式。
扫描模式接受带宽可达几百KHz,此模式主要用来和LC振荡的发射机配套使用,因为,LC 发射机的频率漂移较大,在扫描模式下,数据通讯速率为每秒2.5KBytes。
固定模式的带宽仅几十KHz,此模式用于和使用晶振稳频的发射机配套,数据速率可达每秒钟10KBytes。
工作模式选择通过MICRF002的第16脚(SWEN)实现。
另外,使用唤醒功能可以唤醒译码器或CPU,以最大限度地降低功耗。
简易无线电遥控系统的电路设计

山东职业学院毕业论文题目:简易无线电遥控系统的电路设计系别:电气工程系专业:应用电子技术班级:应用电子1232学生姓名:指导教师:完成日期:2014-11-20摘要随着电子技术的飞速发展,新型大规模的遥控集成电路的不断出现,使得遥控技术有了日新月异的发展。
遥控装置的中心控制部件已从早期的分立元件,集成电路逐步发展到现在的单片微型计算机,智能化程度大大提高。
近年来,遥控技术在工业生产,家用电器,安全保卫以及人民日常生活中使用越来越广泛。
无线电遥控技术的诞生,起源于无线电通信技术,最初的构想是无线电电报技术的建立,真空电子管的发明使得无线电技术的应用和普及很快应用在民用和军用各个领域。
自从爱迪生发明了电灯以来,人民对照明电器的开启和关断控制主要使用手动机械开关。
随着无线电的发展,从上个世纪60年代开始,相继出现了无线电遥控的灯开关。
关键词:无线遥控发射电路接收电路 74LS166 YYH26 MC145026目录第一章绪论 (6)1 引言 (6)第二章设计思路与方案论证 (7)2.1方案论证与比较 (7)1.方案一 (7)2.方案二 (8)3.方案三 (9)第三章电路组成及工作原理 (10)3.1总体框图 (10)1. 原理框图 (10)3.2发射部分 (11)1.调频发射机 (11)3.3接受部分 (13)1.编码部分 (15)2.解码部分 (15)3.主要芯片的选用 (15)4 .MC145026的编码 (16)5. MC145027的解码 (17)第四章总结与展望 (19)总结 (19)展望 (19)谢辞 (21)参考文献 (22)第一章绪论1 引言无线遥控,即是在控制端把控制指令以某种编码方式形成易于传输的信号,通过无线电传输,在受控端经解码等处理形成相应的控制操作。
无线控制方式多种多样,可以根据不同的应用需求采用适宜的方式。
所传信息的形成以及信息量的大小来决定采用何种信息编码和处理方式,而信息传送的距离决定采用何种传输方式对于无线遥控技术,当前基本上通过以下几种方式实现:红外线遥控方式,无线电遥控方式,超声波遥控方式和声音遥控方式。
无线遥控电子门铃的设计方案

无线遥控电子门铃的设计方案一、引言无线遥控电子门铃是一种利用无线通信技术和电子技术实现简便、快捷的门铃系统。
相比传统的有线门铃,无线遥控电子门铃具有安装方便、使用简单、维护成本低等优点。
本文将介绍一种基于无线通信技术和电子技术的设计方案。
二、设计原理门铃接收器的设计原理如下:1.接收器采用无线通信技术进行信号传输,可以选择蓝牙、Wi-Fi等无线协议。
2.接收器设有一个接收天线,用于接收遥控发送器发出的信号。
3.接收器将接收到的信号转化为数字信号,并通过内部的芯片进行解码,判断信号是否为有效的门铃信号。
4.如果解码结果为门铃信号,则接收器通过内置的音响或灯光等方式发出提示。
遥控发送器的设计原理如下:1.发送器采用与接收器相匹配的无线通信技术进行信号发送。
2.发送器设有一个发送天线,用于发送门铃信号。
3.发送器通过按键等方式触发信号发送,同时将门铃信号转化为数字信号。
4.发送器将数字信号经过编码处理后,通过发送天线发送出去。
三、硬件设计1.门铃接收器硬件设计门铃接收器硬件设计主要包括主控芯片、无线通信芯片、接收天线、音响/灯光等部分。
其中主控芯片负责对接收到的信号进行解码,判断门铃信号是否有效;无线通信芯片负责与发送器之间建立通信,接收发送器发送的信号。
2.遥控发送器硬件设计遥控发送器硬件设计主要包括主控芯片、无线通信芯片、发送天线、按键等部分。
其中主控芯片负责对按键触发信号的处理和编码处理;无线通信芯片负责与接收器建立通信,并将编码处理后的信号发送出去。
四、软件设计1.门铃接收器软件设计门铃接收器软件设计主要包括信号解码和提示功能。
其中信号解码部分使用编程语言实现,将接收到的数字信号通过解码算法转化为门铃信号,判断信号是否有效;提示功能部分使用编程语言实现,通过音响或灯光等方式发出提示信号。
2.遥控发送器软件设计遥控发送器软件设计主要包括按键触发和编码处理功能。
其中按键触发部分使用编程语言实现,监听按键事件并触发信号发送;编码处理功能使用编程语言实现,将门铃信号编码为数字信号进行传输。
无线遥控门铃的设计与制作
无线遥控门铃的设计与制作一、引言近年来,随着科技的进步和人们生活水平的提高,传统的有线门铃越来越不符合人们的需求。
无线遥控门铃作为一种新型的门铃产品,具有方便安装、使用简单、距离远等优点,逐渐得到了人们的欢迎。
本文将介绍无线遥控门铃的设计与制作过程。
二、设计方案1.需求分析首先,我们需要明确无线遥控门铃的功能需求。
一般情况下,无线遥控门铃需要具备以下几个基本功能:远程接收器可以与无线按键进行通信,接收按键的信号后能够发出门铃声;按键需要能够远程触发门铃发声;门铃声需要清晰、响亮,能够吸引住户的注意。
2.确定技术选型根据功能需求,我们可以确定一些基本的技术选型。
无线遥控门铃需要借助无线通信技术实现信号传输,常见的技术包括射频通信、红外通信等,其中射频通信是较为常见的选择,因为它具有信号穿透能力强、传输距离远等优点。
对于门铃声,我们可以采用电子音乐芯片等实现。
3.系统框架设计系统框架主要包括无线按键、远程接收器和门铃发声装置。
无线按键通过射频模块或其他无线模块将信号发送给远程接收器,远程接收器接收到信号后驱动门铃发声。
三、制作过程1.材料准备首先,我们需要准备以下材料:无线按键、远程接收器、门铃发声装置、电池或电源适配器等。
2.无线模块连接将无线模块与无线按键和远程接收器分别连接。
一般情况下,无线模块提供了相应的引脚接口,可以通过接线进行连接。
3.门铃发声装置连接将门铃发声装置与远程接收器连接。
使用导线将远程接收器的输出端与门铃发声装置的输入端连接。
4.电源连接将电池或电源适配器与无线按键、远程接收器及门铃发声装置连接。
确保设备能够正常工作。
5.测试与调试将无线按键位置放置合适的地方,按下按键,观察门铃发声装置是否能够发出清晰、响亮的门铃声。
如不能发声,可能是无线模块连接不正确或门铃发声装置故障等原因。
四、注意事项1.确保材料的质量可靠,以提高门铃的稳定性和使用寿命。
2.在进行电源连接时,务必注意电压和电流的要求,以避免发生过电压或过电流的情况导致设备损坏。
2.4G遥控设计文库.
分享一种2.4G遥控的设计无线遥控就是利用高频无线电波实现对模型的控制。
目前,传统无线遥控系统普遍存在同频干扰和遥控距离小两大问题。
主要原因是载频较低导致带宽较窄和控制信息以模拟方式传输使得同频干扰可能性的增大。
而采用先进的2.4 GHz扩频技术,从理论上讲可以让上百人在同一场地同时遥控自己的模型而不会相互干扰.而且在遥控距离方面也颇具优势,2.4 GHz遥控系统的功率仅仅在100 mW以下,而它的遥控距离可以达到1以上,而且由于频率高,天线长度只有3 cm;另外,可借鉴的商用技术较多。
因此,很有必要将2.4 GHz扩频通信技术应用于无线遥控领域。
1系统方案设计1.1采用WirelessUSB技术简介在2.4 GHz频段,有许多较为成熟的通信技术可以借鉴,如蓝牙,Zigbee等。
其中WirelessUSB技术非常值得注意。
该技术由Cypress公司提出,工作在2.4 GHz(ISM频段,相对于其他在2.4 GHz波段使用的无线短距技术,成本较低。
消除了系统的复杂性和开销,避免了蓝牙与ZigBee等无线网络解决方案的困扰,方便易用,特别适合于点对点以及多点对多点的设备小数据包通信,而且功耗较低,是适用于2.4 GHz无线遥控的理想选择。
1.2遥控系统设计框图及原理系统分为发射和接收两部分,发射部分由PPM编码、PPM/PCM转换、扩频和功放等单元组成,接收部分由前置放大、解扩、PCM/PPM转换等单元组成,其结构如图1所示。
其工作过程是:在发射时,操作遥控设备的操纵杆,通过PPM编码产生一组PPM信号,经过PPM/PCM 转换单元,进行时间采样量化后,实现PCM编码,基带单元将PCM信号根据接口协议传到扩频单元中,在扩频单元中,PCM基带信号进行直接序列扩频后,被调制到2.4 GHz频率上,经过功放单元放大后,由天线发射出去,完成发射。
在接收时,射频信号被安装在模型上的天线接收到后,经过前置放大器,变为低噪声放大信号,送到接收机的解扩单元;在此进行射频信号的解扩和解调,获得为PCM基带信号,然后送到接收机PCM/PPM单元,进行PCM信号到PPM信号的转换,恢复成PPM模拟信号输出到各个舵机,完成相应的动作。
无线遥控车课程设计
无线遥控车课程设计一、课程目标知识目标:1. 让学生理解无线遥控车的基本工作原理,掌握其电路组成和功能。
2. 使学生了解无线通信的基本概念,包括发射器、接收器和信号传输过程。
3. 帮助学生掌握物理学科中与电磁波相关的基础知识,如频率、波长和传播特性。
技能目标:1. 培养学生运用所学的知识,独立组装和调试无线遥控车的能力。
2. 提高学生的问题分析和解决能力,使其在遥控车出现故障时,能迅速找出原因并进行维修。
3. 培养学生的团队协作能力,通过分组合作完成复杂任务。
情感态度价值观目标:1. 培养学生对科学技术的兴趣和好奇心,激发他们探索未知领域的热情。
2. 培养学生的创新意识和动手能力,鼓励他们勇于尝试,克服困难。
3. 增强学生的环保意识,让他们认识到电磁波对环境的影响,并学会合理使用。
本课程针对的学生特点是好奇心强、动手能力较好,对新鲜事物充满兴趣。
结合课程性质、学生特点和教学要求,课程目标具体、可衡量,以便教师进行有效的教学设计和评估。
通过本课程的学习,学生不仅能掌握无线遥控车的相关知识,还能提高自己的技能和情感态度价值观,为未来的学习和发展奠定基础。
二、教学内容1. 无线遥控车基本原理:介绍遥控车电路组成,包括发射器、接收器、电机驱动电路等;讲解无线通信的基本概念,如信号的调制与解调过程。
2. 电磁波知识:讲解电磁波的传播特性,频率、波长等基本概念,以及电磁波在无线通信中的应用。
3. 遥控车组装与调试:指导学生了解遥控车的各个部件及其功能,学会组装和调试遥控车,掌握基本的操作技巧。
4. 故障分析与维修:教授学生如何分析遥控车故障原因,进行维修和调试,提高问题解决能力。
5. 团队合作与展示:组织学生分组合作,共同完成一辆无线遥控车的组装和调试,培养学生团队协作精神,并在课程结束时进行作品展示。
教学内容根据课程目标制定,涵盖教材中相关章节。
具体安排如下:1. 第1周:无线遥控车基本原理学习,了解电路组成和功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无线遥控设计一. 总体概述:本系统有六大部分组成分PS/2电脑键盘控制部分.双单片机控制部分.无线数字收发部分.摄相头采集部分.高频放大发射部分.电视观察接收信号图像部分。
二. 题目分析及方案论证:本题中要求发射大于10米,且多通道。
所以可采用高频无线数字收发模块。
如NRF 系列数字收发模块。
可选用单片机给数字模块进行控制和配置寄存器,及用SPI给数字模块发送数据。
1 .NRF系列数字收发模块选择方案论证1.1 NRF401可以达到题目要求所设计的无线数传模块由单片射频收发芯片nRF401.AT89C52微控制器和MAX3316接口芯片构成,工作在433.92/434.33MHz频段; nRF401是北欧集成电路公司(NORDIC)的产品,是一个为433MHz ISM频段设计的真正单片UHF无线收发芯片,满足欧洲电信工业标准(ETSI)EN300200-1 V1.2.1。
它采用FSK调制解调技术,最高工作速率可以达到20K,发射功率可以调整,最大发射功率是+10dBm。
nRF401的天线接口设计为差分天线,以便于使用低成本的PCB天线。
它要求非常少的外围元件(约10个),无需声表滤波器.变容管等昂贵的元件,只需要便宜且易于获得的4MHz晶体,收发天线合一。
无需进行初始化和配置,不需要对数据进行曼彻斯特编码,有两个工作频宽(433.92/434.33MHz),工作电压范围可以从2.7-5V,还具有待机模式,可以更省电和高效。
n RF401无线收发芯片的结构框图如图1所示:内部结构可分为发射电路.接收电路.模式和低功耗控制逻辑电路及串行接口几部分。
发射电路包含有:射频功率放大器.锁相环(PLL),压控振荡器(VCO),频率合成器等电路。
基准振荡器采用外接晶体振荡器,产生电路所需的基准频率。
其主要特性如下: ●工作频率为国际通用的数传频段●FSK 调制,抗干扰能力强,特别适合工业控制场合;●采用PLL频率合成技术,频率稳定性极好;●灵敏度高,达到-105dBm(nRF401);●功耗小,接收状态250 A,待机状态仅为8 A (nRF401);●最大发射功率达 +10dBm ;●低工作电压(2.7V),可满足低功耗设备的要求;●具有多个频道,可方便地切换工作频率;●工作速率最高可达20Kbit/s(RF401);●仅外接一个晶体和几个阻容.电感元件,基本无需调试;●因采用了低发射功率.高接收灵敏度的设计,使用无需申请许可证,开阔地的使用距离最远可达1000米 (与具体使用环境及元件参数有关)。
T X与RX之间的切换当从RX切换到TX模式时,数据输入脚(DIN)必须保持为高至少1ms才能收发数据。
当从TX切换到RX 时,数据输出脚(DOUT)要至少3ms以后有数据输出。
S tandby 与RX之间的切换从待机模式到接收模式,当PWR_UP输入设成1时,经过tSR时间后,DOUT脚输出数据才有效。
对 nRF401来说,tST最长的时间是3ms。
从待机模式到发射模式,所需稳定的最大时间是tST。
P ower Up与TX间的切换从加电到发射模式过程中,为了避免开机时产生干扰和辐射,在上电过程中TXEN的输入脚必须保持为低,以便于频率合成器进入稳定工作状态。
当由上电进入发射模式时,TXEN必须保持1ms以后才可以往DIN发送数据。
从上电到接收模式过程中,芯片将不会接收数据,DOUT也不会有数据输出,直到电压稳定达到2.7V以上,并且至少保持5ms。
如果采用外部振荡器,这个时间可以缩短到3ms。
在实际应用中,微控制器采用Atmel公司的AT89C52,分别用单片机的P1口各管脚控制nRF401的DIN.DOUT.TXEN.PWRUP.CS这五个脚即可。
接口芯片采用美信公司的RS232转换芯片MAX3316,完成单片机和计算机RS232接口的电平转换及数据发送.接收.请求.清除功能。
在nRF401芯片使用时,设定好工作频率,进入正常工作状态后,通过单片机根据需要进行收发转换控制,发送/接收数据或进行状态转换。
在设计程序时,要注意各状态转换的时延。
nRF401的通讯速率最高为20kbit/s,发送数据之前需将电路置于发射模式;接收模式转换为发射模式的转换时间至少为1ms;可以发送任意长度的数据;发射模式转换为接收模式的转换时间至少为3ms。
在待机模式时,电路进入待机状态,电路不接收和发射数据。
待机模式转换为发射模式的转换时间至少为4ms;待机模式转换为接收模式的转换时间至少为5.0ms。
这里给出系统和程序的工作流程图1.2 单片射频收发器nRF905也可达到要求 nRF905是挪威Nordic VLSI公司推出的单片射频收发器,工作电压为1.9~3.6V,32引脚QFN封装(5由频率合成器.接收解调器.功率放大器.晶体振荡器和调制器组成,不需外加声表滤波器,ShockBurstTM工作模式,自动处理字头和CRC(循环冗余码校验),使用SPI接口与微控制器通信,配置非常方便。
此外,其功耗非常低,以-10dBm的输出功率发射时电流只有11mA,工作于接收模式时的电流为12.5mA,内建空闲模式与关机模式,易于实现节能。
nRF905适用于无线数据通信.无线报警及安全系统.无线开锁.无线监测.家庭自动化和玩具等诸多领域。
NRF905比NRF401先进多了。
能充分满足题目要求。
2. 芯片结构.引脚介绍及工作模式 nRF905片内集成了电源管理.晶体振荡器.低噪声放大器.频率合成器功率放大器等模块,曼彻斯特编码/解码由片内硬件完成,无需用户对数据进行曼彻斯特编码,因此使用非常方便。
nRF905的详细结构如图1所示。
2.2引脚介绍表1:nRF905引脚 nRF905有两种工作模式和两种节能模式。
两种工作模式分别是ShockBurstTM接收模式和ShockBurstTM发送模式,两种节能模式分别是关机模式和空闲模式。
nRF905的工作模式由TRX_CE.TX_EN和PWR_UP三个引脚决定,详见表2。
2.1ShockBurstTM模式与射频数据包有关的高速信号处理都在nRF905片内进行,数据速率由微控制器配置的SPI接口决定,数据在微控制器中低速处理,但在nRF905中高速发送,因此中间有很长时间的空闲,这很有利于节能。
由于nRF905工作于ShockBurstTM模式,因此使用低速的微控制器也能得到很高的射频数据发射速率。
在ShockBurstTM接收模式下,当一个包含正确地址和数据的数据包被接收到后,地址匹配(AM)和数据准备好(DR)两引脚通知微控制器。
在ShockBurstTM发送模式,nRF905自动产生字头和CRC校验码,当发送过程完成后,数据准备好引脚通知微处理器数据发射完毕。
由以上分析可知,nRF905的ShockBurstTM收发模式有利于节约存储器和微控制器资源,同时也减小了编写程序的时间。
下面具体详细分析nRF905的发送流程和接收流程。
2.2发送流程典型的nRF905发送流程分以下几步:接口的速率在通信协议和器件配置时确定; B. 微控制器置高TRX_CE和TX_EN,激发nRF905的ShockBurstTM发送模式; C. nRF905的ShockBurstTM发送: l 数据打包(加字头和CRC校验码);2 发送数据包;3 当数据发送完成,数据准备好引脚被置高; D.AUTO_RETRAN被置高,nRF905不断重发,直到TRX_CE被置低; E. 当TRX_CE被置低,nRF905发送过程完成,自动进入空闲模式。
ShockBurstTM工作模式保证,一旦发送数据的过程开始,无论TRX_EN和TX_EN引脚是高或低,发送过程都会被处理完。
只有在前一个数据包被发送完毕,nRF905才能接受下一个发送数据包。
2.3接收流程 A. 当TRX_CE为高.TX_EN为低时,nRF905进入ShockBurstTM接收模式; B.650us后,nRF905不断监测,等待接收数据; C. 当nRF905检测到同一频段的载波时,载波检测引脚被置高; D. 当接收到一个相匹配的地址,地址匹配引脚被置高; E. 当一个正确的数据包接收完毕,nRF905自动移去字头.地址和CRC校验位,然后把数据准备好引脚置高 F. 微控制器把TRX_CE置低,nRF905进入空闲模式; G. 微控制器通过SPI口,以一定的速率把数据移到微控制器内; H. 当所有的数据接收完毕,nRF905把数据准备好引脚和地址匹配引脚置低; I. nRF905此时可以进入ShockBurstTM接收模式.ShockBurstTM发送模式或关机模式。
当正在接收一个数据包时,TRX_CE或TX_EN引脚的状态发生改变,nRF905立即把其工作模式改变,数据包则丢失。
当微处理器接到地址匹配引脚的信号之后,其就知道nRF905正在接收数据包,其可以决定是让nRF905继续接收该数据包还是进入另一个工作模式。
2.4节能模式 nRF905的节能模式包括关机模式和节能模式。
在关机模式,nRF905的工作电流最小,一般为2.5uA。
进入关机模式后,nRF905保持配置字中的内容,但不会接收或发送任何数据。
空闲模式有利于减小工作电流,其从空闲模式到发送模式或接收模式的启动时间也比较短。
在空闲模式下,nRF905内部的部分晶体振荡器处于工作状态。
nRF905在空闲模式下的工作电流跟外部晶体振荡器的频率有关。
2.5 器件配置所有配置字都是通过SPI接口送给nRF905。
SIP接口的工作方式可通过SPI指令进行设置。
当nRF905处于空闲模式或关机模式时,SPI接口可以保持在工作状态。
2.6SPI接口配置 SPI接口由状态寄存器.射频配置寄存器.发送地址寄存器.发送数据寄存器和接收数据寄存器5个寄存器组成。
状态寄存器包含数据准备好引脚状态信息和地址匹配引脚状态信息;射频配置寄存器包含收发器配置信息,如频率和输出功能等;发送地址寄存器包含接收机的地址和数据的字节数;发送数据寄存器包含待发送的数据包的信息,如字节数等;接收数据寄存器包含要接收的数据的字节数等信息。
2.7射频配置射频配置寄存器和内容如表3所示:表3:射频配置寄存器射频寄存器的各位的长度是固定的。
然而,在ShockBurstTM收发过程中,TX_PAYLOAD.RX_PAYLOAD.TX_ADDRESS 和RX_ADDRESS4个寄存器使用字节数由配置字决定。
nRF905进入关机模式或空闲模式时,寄存器中的内容保持不变。
2.8 应用电路 nRF905在使用中,根据不同需要,其电路图不尽相同,图2所示为典型的应用原理图,该电路天线部分使用的是50Ω单端天线。