CK4M系列边缘融合控制器方案
2024年柔性制造单元(FMC)项目发展计划
柔性制造单元(FMC)项目发展计划目录前言 (4)一、风险应对评估 (4)(一)、政策风险分析 (4)(二)、社会风险分析 (4)(三)、市场风险分析 (5)(四)、资金风险分析 (5)(五)、技术风险分析 (5)(六)、财务风险分析 (5)(七)、管理风险分析 (6)(八)、其它风险分析 (6)二、背景和必要性研究 (6)(一)、柔性制造单元(FMC)项目承办单位背景分析 (6)(二)、柔性制造单元(FMC)项目背景分析 (7)三、工程设计说明 (8)(一)、建筑工程设计原则 (8)(二)、柔性制造单元(FMC)项目工程建设标准规范 (9)(三)、柔性制造单元(FMC)项目总平面设计要求 (9)(四)、建筑设计规范和标准 (9)(五)、土建工程设计年限及安全等级 (9)(六)、建筑工程设计总体要求 (9)四、柔性制造单元(FMC)项目建设地分析 (10)(一)、柔性制造单元(FMC)项目选址原则 (10)(二)、柔性制造单元(FMC)项目选址 (10)(三)、建设条件分析 (11)(四)、用地控制指标 (12)(五)、用地总体要求 (13)(六)、节约用地措施 (14)(七)、总图布置方案 (16)(八)、运输组成 (18)(九)、选址综合评价 (21)五、柔性制造单元(FMC)项目落地与推广 (21)(一)、柔性制造单元(FMC)项目推广计划 (21)(二)、地方政府支持与合作 (22)(三)、市场推广与品牌建设 (23)(四)、社会参与与共享机制 (24)六、柔性制造单元(FMC)项目收尾与总结 (25)(一)、柔性制造单元(FMC)项目总结与经验分享 (25)(二)、柔性制造单元(FMC)项目报告与归档 (28)(三)、柔性制造单元(FMC)项目收尾与结算 (29)(四)、团队人员调整与反馈 (31)七、质量管理与监督 (32)(一)、质量管理原则 (32)(二)、质量控制措施 (34)(三)、监督与评估机制 (35)(四)、持续改进与反馈 (37)八、科技创新与研发 (40)(一)、科技创新战略规划 (40)(二)、研发团队建设 (41)(三)、知识产权保护机制 (42)(四)、技术引进与应用 (44)九、供应链管理 (45)(一)、供应链战略规划 (45)(二)、供应商选择与评估 (45)(三)、物流与库存管理 (46)(四)、供应链风险管理 (48)十、市场营销与品牌推广 (49)(一)、市场调研与定位 (49)(二)、营销策略与推广计划 (50)(三)、客户关系管理 (51)(四)、品牌建设与维护 (53)十一、员工福利与团队建设 (55)(一)、员工福利政策制定 (55)(二)、团队建设活动规划 (56)(三)、员工关怀与激励措施 (56)(四)、团队文化与价值观塑造 (58)十二、成本控制与效益提升 (59)(一)、成本核算与预算管理 (59)(二)、资源利用效率评估 (61)(三)、降本增效的具体措施 (63)(四)、成本与效益的平衡策略 (65)前言在当今激烈的市场竞争中,项目合作是激发创新、优化资源配置、实现共赢战略的关键手段。
Control4标准方案

智能家居全套方案目录一、智能家居系统简介 (3)1、什么是智能家居 (3)2、Control4如何实现智能化 (4)3、智能家居系统优点 (5)4、真正受益与Control4 (5)二、****智能控制系统具体方案设计 (10)1、设计思路 (10)2、控制区域 (10)3、控制内容 (11)4、具体方案功能描述 (12)三、系统结构原理 (18)四、各子系统技术实现 (20)1、智能灯光系统 (20)2、HVAC空调系统 (23)3、背景音乐系统 (24)4、安防及摄像头监控系统 (26)5、家庭影院系统 (28)6、电动窗帘、幕布控制系统 (31)7、远程监控 (32)五、常用智能家居产品 (33)1、家庭控制主机 (34)2、触摸屏 (35)3、智能控制面板 (36)4、系统配件 (36)5、背景音乐 (37)六、部分工程案例 (38)Control4公司简介 (39)一、智能家居系统简介1、什么是智能家居智能家居是一个居住环境,是以住宅为平台安装有智能家居系统的居住环境,实施智能家居系统的过程就称为智能家居集成。
通俗地说,它是融合了自动化控制系统、计算机网络系统和网络通讯技术于一体的网络化智能化的家居控制系统。
智能家居将让用户有更方便的手段来管理家庭设备,比如,通过无线触摸屏、无线遥控器、电话、互联网或者语音识别控制家用设备,更可以执行场景操作,使多个设备形成联动;另一方面,智能家居内的各种设备相互间可以通讯,不需要用户指挥也能根据不同的状态互动运行,从而给用户带来最大程度的高效、便利、舒适与安全。
完整的智能家居系统产品应是包括了硬件产品、软件产品、集成与安装服务、售后在内的一个完整过程。
2、Control4如何实现智能化使用一套智能家居控制系统,来管理家中的所有电子设备,许多人都会觉得有些遥不可及。
那么是因为价格太贵,要么是房屋装修好后很难再安装使用,现在有了Control4,房主可以立刻享受到智能家居的诸多便利,而不需要花费很多。
CK4MH-MF0102融合器技术参数2
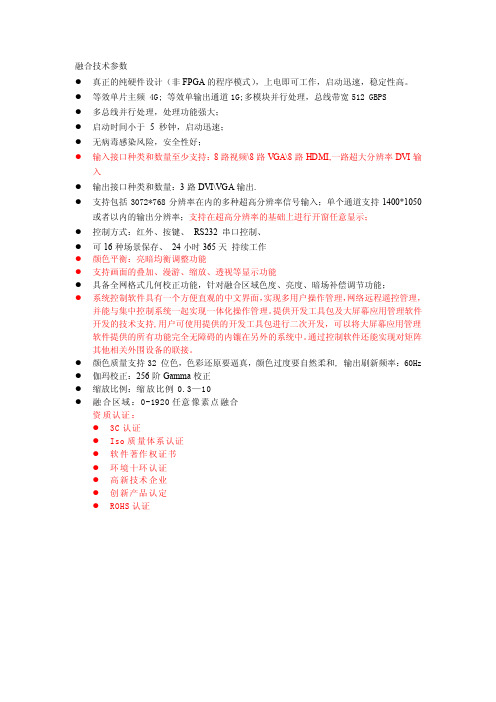
融合技术参数●真正的纯硬件设计(非FPGA的程序模式),上电即可工作,启动迅速,稳定性高。
●等效单片主频 4G; 等效单输出通道1G;多模块并行处理,总线带宽512 GBPS●多总线并行处理,处理功能强大;●启动时间小于 5 秒钟,启动迅速;●无病毒感染风险,安全性好;●输入接口种类和数量至少支持:8路视频\8路VGA\8路HDMI,一路超大分辨率DVI输入●输出接口种类和数量:3路DVI\VGA输出.●支持包括3072*768分辨率在内的多种超高分辨率信号输入;单个通道支持1400*1050或者以内的输出分辨率;支持在超高分辨率的基础上进行开窗任意显示;●控制方式:红外、按键、RS232 串口控制、●可16种场景保存、24小时365天持续工作●颜色平衡:亮暗均衡调整功能●支持画面的叠加、漫游、缩放、透视等显示功能●具备全网格式几何校正功能,针对融合区域色度、亮度、暗场补偿调节功能;●系统控制软件具有一个方便直观的中文界面,实现多用户操作管理,网络远程遥控管理,并能与集中控制系统一起实现一体化操作管理。
提供开发工具包及大屏幕应用管理软件开发的技术支持,用户可使用提供的开发工具包进行二次开发,可以将大屏幕应用管理软件提供的所有功能完全无障碍的内镶在另外的系统中。
通过控制软件还能实现对矩阵其他相关外围设备的联接。
●颜色质量支持32 位色,色彩还原要逼真,颜色过度要自然柔和, 输出刷新频率:60Hz ●伽玛校正:256阶Gamma校正●缩放比例:缩放比例0.3—10●融合区域:0-1920任意像素点融合资质认证:●3C认证●Iso质量体系认证●软件著作权证书●环境十环认证●高新技术企业●创新产品认定●ROHS认证。
创凯电子高清边缘融合图像控制器
Байду номын сангаас设备
型号和性能参数
数量
单价
总价
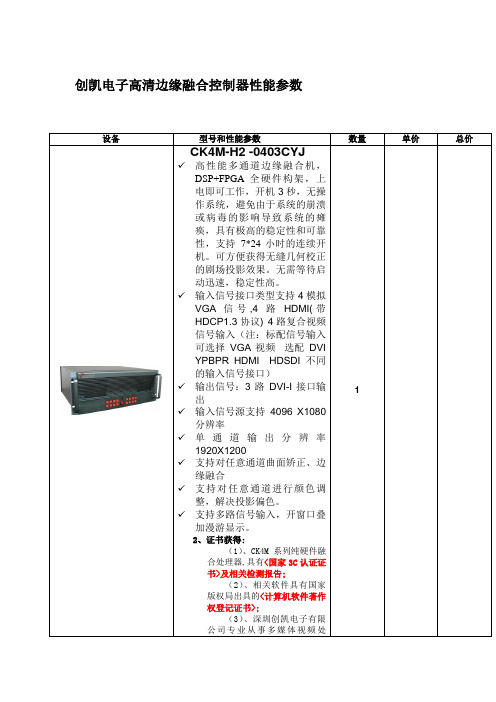
CK4M-H2-0403CYJ
高性能多通道边缘融合机,DSP+FPGA全硬件构架,上电即可工作,开机3秒,无操作系统,避免由于系统的崩溃或病毒的影响导致系统的瘫痪,具有极高的稳定性和可靠性,支持7*24小时的连续开机。可方便获得无缝几何校正的剧场投影效果。无需等待启动迅速,稳定性高。
支持对任意通道进行颜色调整,解决投影偏色。
支持多路信号输入,开窗口叠加漫游显示。
2、证书获得:
(1)、CK4M系列纯硬件融合处理器,具有<国家3C认证证书>及相关检测报告;
(2)、相关软件具有国家版权局出具的<计算机软件著作权登记证书>;
(3)、深圳创凯电子有限公司专业从事多媒体视频处理、网络应用、高分辨率、高清晰度图像处理技术的研发和设备的生产,公司具有<高新技术企业>认证证书;
输入信号接口类型支持4模拟VGA信号,4路HDMI(带HDCP1.3协议) 4路复合视频信号输入(注:标配信号输入可选择VGA视频选配DVI YPBPR HDMI HDSDI不同的输入信号接口)
输出信号:3路DVI-I接口输出
输入信号源支持4096X1080分辨率
单通道输出分辨率1920X1200
支持对任意通道曲面矫正、边缘融合
(4)获得中国环境标志(II型)产品认证证书,
1
KUKA机器人KRC4集成方案-图文版

目次前言 (3)1 目的.............................................................................42 范围.............................................................................43 规范性引用文件...................................................................44 术语和定义.......................................................................45 机器人集成标准...................................................................45.2.2机器人与焊枪、焊机接口配置 (15)5.2.3机器人与抓手接口配置 (22)5.2.4机器人与水气单元配置 (23)5.3机器人调试内容 (24)5.3.1工具坐标建立 (24)5.3.2工具重量测试 (27)5.3.3 T une枪 (33)5.3.4 抓放枪、抓放抓手调试 (46)5.3.5 车身坐标系建立 (53)5.3.6 点焊参数设定 (55)5.3.7 焊点路径调试 (55)5.3.8 干涉区设定 (59)5.3.9 节拍优化 (68)5.4 特殊功能机器人调试 (68)5.4.1 涂胶调试 (69)5.4.2 弧焊调试 (101)前言一、机器人技术部是本文件的归口管理部门,享有文件更改、修订、日常维护及最终解释权。
二、文件版本历史记录:三、本文件与上一版文件相比的主要变化点:无。
四、本文件自实施之日起,代替或废止的文件:无。
1.目的1.1确保机器人调试形成标准化流程,减少新人在学习中所需的人力和时间,降低长城汽车培养新人的成本。
《详解FPGA:人工智能时代的驱动引擎》札记
《详解FPGA:人工智能时代的驱动引擎》阅读随笔目录一、FPGA简介 (2)1.1 FPGA的定义与特点 (3)1.2 FPGA的发展历程 (4)1.3 FPGA的应用领域 (5)二、FPGA的工作原理 (7)2.1 FPGA的基本架构 (8)2.2 FPGA的工作模式 (10)2.3 FPGA的编程语言 (11)三、FPGA在人工智能领域的应用 (12)3.1 机器学习与深度学习 (14)3.2 自动驾驶与机器人技术 (15)3.3 无人机与智能物流 (17)3.4 医疗诊断与生物信息学 (18)3.5 其他领域的FPGA应用 (20)四、FPGA的设计与优化 (22)4.1 FPGA设计流程 (23)4.2 硬件描述语言 (25)4.3 设计优化策略 (26)4.4 性能评估与测试 (28)五、FPGA的未来发展趋势 (29)5.1 技术创新与突破 (30)5.2 行业合作与生态系统建设 (32)5.3 应对挑战与机遇 (33)六、结论 (35)6.1 FPGA在人工智能时代的重要性 (36)6.2 未来展望与期许 (37)一、FPGA简介FPGA(现场可编程门阵列)是一种集成电路芯片,它允许设计师在硬件层面上实现可编程的解决方案。
与传统的专用硬件电路相比,FPGA具有更高的灵活性和可扩展性,因此在人工智能、数据中心、通信等领域得到了广泛应用。
FPGA的核心特点是可编程性。
它可以根据需要动态地重新配置内部逻辑单元,从而实现各种功能。
这种可编程性使得FPGA在应对不断变化的应用需求时具有很高的效率。
FPGA还具备低功耗、高性能、高可靠性等优点。
FPGA的发展历程可以追溯到20世纪80年代,当时Xilinx公司推出了世界上第一款商用FPGA产品。
随着技术的不断发展,FPGA的性能不断提高,功能也越来越丰富。
FPGA已经发展到了第四代,即UltraScale系列,其最大容量可达140亿个逻辑单元,支持多种编程语言和开发工具,为人工智能时代的应用提供了强大的支持。
淳中科技3D边缘融合控制器方案

3D立体缘融合控制器应用方案2012-06-01一、前言随着3D立体电影《阿凡达》的火爆上映,让我们发觉了3D的优越性。
各种3D节目源的制作与发行,以及丰富的3D播放与显示设备的上市,倏忽间人们已置身于一个由3D 技术打造的全新的影音世界。
人们已不在满足传统的家庭影院娱乐的需求,于是最新的3D 家庭影院开始进入人们的视野,而3D家庭影院投影机也以其身临其境的视觉震撼力,吸引了越来越多用户的关注。
现在针对三楼的影像播发厅,进行升级,制定了一个解决方案。
二、方案概述:本次针对播放厅的原有的设备结构及需求,选用北京淳中科技TRICOLOR系列3D立体缘融合控制器。
淳中科技TRICOLOR系列3D立体缘融合控制器是沉浸式虚拟现实显示系统的初级形式,是一套基于高端虚拟现实三维立体投影显示系统,该系统通常以一台图形计算机为实时驱动平台,数台成对叠加的立体版专业LCD或DLP投影机作为投影主体显示一幅高分辨率的立体投影影像,所以通常又称之为多通道立体投影系统。
于传统的投影相比,该系统最大的优点是能够显示优质的高分辨率三维立体投影影像,为虚拟仿真用户提供一个有立体感的半沉浸式虚拟三维显示和交互环境,同时也可以显示非立体影像,而由于虚拟仿真应用的特性和要求,通常情况下均使用其立体模式。
在虚拟现实应用中用以显示实时的虚拟现实仿真应用程序,该系统通常主要包括专业投影显示系统、悬挂系统、成像装置等三部分,在众多的虚拟现实三维显示系统中,该立体投影系统是一种低成本、操作简便、占用空间较小、具有极好性能价格比的小型半沉浸式虚拟现实显示系统,被广泛应用于高等院校和科研院所的虚拟现实实验室中。
三、系统逻辑图:四、主要设备清单:说明:3D信号通过PC同时分配给两台融合器,处理器4台投影机形成3D 效果;通过中控可以控制系统的所有设备和切换预设的场景。
当需要观看2D视频的时候,通过中控控制其中一台融合显示黑场即可。
五、产品技术参数:5.1 MultiView 融合控制器MultiView边缘融合处理器概述:MultiView Plus+™ MVCR系列边缘融合处理边缘融合处理器是基于纯硬件嵌入式操作系统的网络多屏拼接带边缘融合的处理边缘融合处理器,采用边缘融合技术使拼接大屏幕系统成为一个具有超高分辩率的单一逻辑屏并且中间没有拼缝,组成大屏幕系统的所有显示单元的分辨率之总和,在大屏幕上能处理显示网络图形信号、视频信号、RGB信号,视频和RGB信号可以在整个大屏上进行窗口漫游,并且信号的显示完全实时,视频信号支持PAL/NTSC/SECAM制式。
基于改进DDPG的多AGV路径规划算法
基于改进DDPG的多AGV路径规划算法目录1. 内容综述 (2)1.1 研究背景 (2)1.2 研究目的 (4)1.3 文献综述 (4)1.4 问题提出与论文结构 (6)2. 多智能体系统(MAS)理论基础 (7)2.1 多智能体系统概述 (9)2.2 多智能体通信模型 (10)2.3 多智能体协同任务规划 (11)3. 深度确定性策略梯度算法(DDPG) (13)3.1 DDPG算法简介 (14)3.2 DDPG算法结构 (16)3.3 DDPG算法的训练与参数调整 (17)4. 基于改进DDPG的多AGV路径规划算法 (19)4.1 智能体交互模型设计 (20)4.2 多智能体协同路径规划的优化方法 (22)4.3 基于奖励机制的路径规划评估标准设计 (23)4.4 改进DDPG算法流程 (24)4.5 仿真实验设置与结果分析 (25)4.5.1 仿真环境搭建 (27)4.5.2 仿真数据与指标 (28)4.5.3 仿真对比实验 (29)5. 结论与展望 (31)5.1 主要贡献与创新点 (32)5.2 研究展望 (33)1. 内容综述本文档旨在深入探讨基于改进型深度确定性策略梯度(DDPG)算法的多自主导引车(AGV)路径规划技术。
现代社会对高效物流和自动化仓储的需求日益增长,而AGV在这一领域展现了巨大的潜力和应用价值。
要求增加的全局路径规划效率和实时更新的能力对传统的规划算法提出挑战。
我们研究并构建了一种新型的、结合强化学习技术的路径优化方案,该方案旨在提升调度决策的速度与质量。
改进DDPG算法通过引入先进的Q网络优化技术和动作重复机制,极大地削弱了传统DDPG算法的时序维度依赖,同时加强了对特定场景的适应能力。
在多AGV协同工作的实际情境下,该算法博客摆明了,目标是通过学习目标函数的稳定梯度,在确保安全的前提下,以最短路径完成货物运输,避免无用的转弯和冗余路径,从而提高吞吐量和资源利用率。
智能融合2 FPGA 微控制器子系统 BFM 仿真指南说明书

SmartFusion2 FPGA Microcontroller Subsystem BFM Simulation GuideSmartFusion2 FPGA Microcontroller Subsystem BFM Simulation Guide Table of ContentsIntroduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Simulation Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Cortex-M3 BFM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 MSS Peripherals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Fabric Peripherals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42Simulation Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53BFM Example. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 Writing and Verifying Fabric GPIO Bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 BFM Compiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9A Product Support. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10Customer Service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 Customer Technical Support Center . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 Technical Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 Website . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 Contacting the Customer Technical Support Center . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 ITAR Technical Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11IntroductionThe SmartFusion2 FPGA's Microcontroller Subsystem (MSS) can be simulated using ModelSim or othersupported third-party simulators. MSS Simulation is performed using a Bus Functional Model (BFM)strategy. Simulation can be useful in the following situations:•Verifying the connectivity and addressing of MSS peripherals.•Verifying the DDR Memory configuration and addressing with your vendor's memory (subject to availability of appropriate HDL memory models).•Verifying addressing of peripherals in the Fabric that are connected to the MSS using the 32-bit or 64-bit Fabric Interface Controllers (FICs).This document describes how to simulate your SmartFusion2 FPGA design that includes the MSS.Note:Only one MSS component is allowed in your design.1 – Simulation ModelsCortex-M3 BFMThe SmartFusion2 MSS' Cortex-M3 processor is modeled with Microsemi's AMBA Bus Functional Model(BFM). Refer to Microsemi's DirectCore AMBA BFM User's Guide for details on the supportedinstructions and syntax of the BFM commands.MSS PeripheralsTo minimize simulation time, certain peripherals in the SmartFusion2 MSS do not have full behavioralmodels. Instead they are replaced with memory models that will output a message indicating when thememory locations inside the peripheral have been accessed. This means that the peripheral outputsignals do not toggle based on any writes to registers, or react to any signal inputs on the protocol pins.The peripherals without full behavioral models are:•CAN•Ethernet•MMUART•I2C•PDMA•RTC•SPI•USB•WatchDogThe peripherals that have full behavioral models are:•AHB Bus Matrix•eNVM•Fabric Interface Controllers•GPIO•MDDR•MSS Clock Conditioning CircuitFabric PeripheralsRTL level simulation models are available to simulate Fabric peripherals.2 – Simulation FlowFigure 2-1 illustrates the hierarchy of a SmartFusion2 design that includes the MSS and two fabric peripherals. The MSS component is instantiated in a top level SmartDesign component with fabric peripherals. The fabric peripherals 1 and 2 are two instances of CoreGPIO (32-bits each). In this scenario, generating the MSS component produces the following four *bfm files for simulation. These BFM files are generated in the <project_dir>/simulation foldertest.bfm - Contains the BFM commands to initialize the simulation model. The BFM commands in this file are generated based upon your MSS configuration. This file is analogous to the system boot code, as it initializes the MSS and calls your user application. This file contains an include directive for user.bfm, and a procedure call to user_main (see below). Do not edit this file.user.bfm - You can customize this file to emulate CortexM3 transactions in your system. This file contains an include directive to subsystem.bfm. The memory map of MSS and Fabric peripherals is specified inside subsystem.bfm, you can refer to those defines inside user.bfm. This file is analogous to your user application code. This file contains the procedure user_main, which is analogous to your main function in your application. You can add BFM instructions and procedures to user.bfm to emulate your application. Refer to Microsemi's DirectCore AMBA BFM User's Guide for details on the supported instructions and syntax of the BFM.subysystem.bfm - Contains the memory map of all subsystems. You do not have to modify this file. Base addresses of AMBA slaves connected to the MSS via recognized AMBA buses in your design can be found here. This includes Fabric peripherals (connected to the MSS via the FICs) as well as MSS (Hard) peripherals.Peripheral_init.bfm - Contains the BFM commands to initialize the MDDR/FDDR and SERDESIF. If your top level design contains any MDDR/FDDR or SERDESIF, Libero SoC automatically generates the peripherals_init.bfm file to initialize these peripherals. During simulation, the simulator executes the BFM commands in the peripherals_init.bfm before executing the user BFM commands. Do not edit this file.The BFM files are summarized in Table 2-1.Figure 2-1 •Example MSS DesignThe BFM files can be accessed via the Files tab in the Simulation folder (as shown in Figure 2-2). To view the file content, double-click the file to open it in the Libero SoC Text Editor.Table 2-1 • BFM Files BFM File Name Function Remarks Test.bfm • Toplevel BFM • Contains the main function Libero-generated. Do not er.bfm• Contains user BFM commands • Calls subsystem_init function Edit this file to add user BFM commands. Subsystem.bfm • Contains subsystem memory map• Define name and base address of eachsubsystem resource• Call the init function to initialize subsystemDo not edit.Peripherals_init.bfm • Contains the Memory Map of all peripherals,including SERDES• Calls the SERDES_<0/1/2/3>_init.bfm toinitialize SERDESDo not edit.Figure 2-2 • Simulation BFM Files3 – BFM ExampleWriting and Verifying Fabric GPIO BitsIn the following example, two instances of CoreGPIO with 32 GPIO's per instance have been added intothe Fabric. Instance CoreGPIO_0 is mapped to address 0x40055000 and Instance CoreGPIO_1 ismapped to address 0x40057000. The subsystem.bfm is automatically generated by Libero SoC andcontains the memory map of the two CoreGPIO instances. CoreGPIO_0 and CoreGPIO_1 can bereferenced from within your user.bfm script.subsystem.bfm#===========================================================# Created by Microsemi SmartDesign## Syntax:# -------## memmap resource_name base_address;## write width resource_name byte_offset data;# read width resource_name byte_offset;# readcheck width resource_name byte_offset data;##===========================================================#-----------------------------------------------------------# Memory Map# Define name and base address of each resource.#-----------------------------------------------------------#Peripheral Base Addressesmemmap CoreGPIO_0 0x40055000;memmap CoreGPIO_1 0x40057000;The subsystem.bfm file is generated automatically every time you generate your MSS component; youdo not need to modify it.user.bfmTo add your own BFM commands, open the user.bfm file in the Libero SoC Text Editor.For example, in the user.bfm file below, a BFM write command is added to write the half word 0x5555 to the CoreGPIO_0 Output register. A BFM readcheck command is then added to read back from the Input Register and compared to the previously written data.To check the syntax of your BFM commands at the end of your edits, right-click and choose Check BFM file. Select the Log tab to view the result of the syntax check.#===========================================================# Enter your BFM commands in this file.#.# Syntax:# -------## memmap resource_name base_address;## write width resource_name byte_offset data;# read width resource_name byte_offset;# readcheck width resource_name byte_offset data;##===========================================================include "subsystem.bfm"procedure user_main;# perform subsystem initialization routinecall subsystem_init;# add your BFM commands below:# GPIO registers (byte wide)# Refer Table 3-1 of CoreGPIO_HB.pdf#Offsets from GPIO Base Addressconstant INREG0 0x90constant OUTREG0 0xA0print "Fabric GPIO Access Start";#Write halfword 0x5555 to CoreGPIO_0 Output Register write h CoreGPIO_0 OUTREG0 0x5555; wait 4;#Read halfword from CoreGPIO_0 Input Register and compare to previously written data #(0x5555)readcheck h CoreGPIO_0 INREG0 0x5555;wait 4;print "CoreGPIO_0 TEST ENDS";wait 4;print "CoreGPIO_1 TEST START";#Write word 0xFFFFFFFF halfword 0x5555 to CoreGPIO_1 Output register Registerwrite w CoreGPIO_1 OUTREG0 0xFFFFFFFF;wait 4;#Read word halfword 0xFFFFFFFF from CoreGPIO_1 Input Register and compare to previously #written data (0xFFFFFFFF )(0x5555)readcheck w CoreGPIO_1 INREG0 0xFFFFFFFF;wait 4;print "CoreGPIO_1 TEST ENDS";print "";returnBFM CompilerLibero SoC includes the BFM compiler, which converts the BFM script files into vector files (*.vec). Thevector files contain a sequence of 32-bit values, each represented by an 8-digit hexadecimal value.Libero SoC is configured to automatically execute the BFM compiler when you invoke ModelSim or othersupported third-party simulators from Libero SoC. Libero SoC then passes the BFM files to the Simulatorfor simulation (Figure3-1). The BFM compiler also verifies the syntax of the BFM file and displays theresult of the syntax check in the Log.Figure3-1 • BFM Compiler and SimulationA – Product SupportMicrosemi SoC Products Group backs its products with various support services, including CustomerService, Customer Technical Support Center, a website, electronic mail, and worldwide sales offices.This appendix contains information about contacting Microsemi SoC Products Group and using thesesupport services.Customer ServiceContact Customer Service for non-technical product support, such as product pricing, product upgrades,update information, order status, and authorization.From North America, call 800.262.1060From the rest of the world, call 650.318.4460Fax, from anywhere in the world, 408.643.6913Customer Technical Support CenterMicrosemi SoC Products Group staffs its Customer Technical Support Center with highly skilledengineers who can help answer your hardware, software, and design questions about Microsemi SoCProducts. The Customer Technical Support Center spends a great deal of time creating applicationnotes, answers to common design cycle questions, documentation of known issues, and various FAQs.So, before you contact us, please visit our online resources. It is very likely we have already answeredyour questions.Technical SupportVisit the Customer Support website (/soc/support/search/default.aspx) for moreinformation and support. Many answers available on the searchable web resource include diagrams,illustrations, and links to other resources on the website.WebsiteYou can browse a variety of technical and non-technical information on the SoC home page, at/soc.Contacting the Customer Technical Support CenterHighly skilled engineers staff the Technical Support Center. The Technical Support Center can becontacted by email or through the Microsemi SoC Products Group website.EmailYou can communicate your technical questions to our email address and receive answers back by email,fax, or phone. Also, if you have design problems, you can email your design files to receive assistance.We constantly monitor the email account throughout the day. When sending your request to us, pleasebe sure to include your full name, company name, and your contact information for efficient processing ofyour request.The technical support email address is **********************.5-02-00433-2/08.14© 2014 Microsemi Corporation. All rights reserved. Microsemi and the Microsemi logo are trademarks of Microsemi Corporation. All other trademarks and service marks are the property of their respective owners.Microsemi Corporation (NASDAQ: MSCC) offers a comprehensive portfolio of semiconductor solutions for: aerospace, defense and security; enterprise and communications; and industrial and alternative energy markets. Products include high-performance, high-reliability analog and RF devices, mixed signal and RF integrated circuits, customizable SoCs, FPGAs, and complete subsystems. Microsemi is headquartered in Aliso Viejo, Calif. Learn more at .Microsemi Corporate HeadquartersOne Enterprise, Aliso Viejo CA 92656 USAWithin the USA: +1 (949) 380-6100Sales: +1 (949) 380-6136Fax: +1 (949) 215-4996My CasesMicrosemi SoC Products Group customers may submit and track technical cases online by going to My Cases .Outside the U.S.Customers needing assistance outside the US time zones can either contact technical support via email (**********************) or contact a local sales office. Sales office listings can be found at /soc/company/contact/default.aspx.ITAR Technical SupportFor technical support on RH and RT FPGAs that are regulated by International Traffic in Arms Regulations (ITAR), contact us via ***************************. Alternatively, within My Cases , select Yes in the ITAR drop-down list. For a complete list of ITAR-regulated Microsemi FPGAs, visit the I TAR web page.。
西门子 SIMATIC 组态硬件和通讯连接, STEP 7 V5.3 版本 手册

更多支持
如果有任何技术问题,请联系西门子代表或代理商。 您可以在下列网页中查找联系人: /automation/partner
培训中心
西门子提供了很多培训教程,帮助您熟悉 SIMATIC S7 自动化系统。请联系当地的 培训中心,或位于德国纽伦堡(D 90327)的培训总部,以获取详细信息。 电话: 网址: +49 (911) 895-3200.
在线帮助中的主题“新增内容?”中极好地概括和介绍了最新的 STEP 7 新内容。
组态硬件和通讯连接,STEP 7 V5.3 版本 A5E00446503-01
iii
前言
STEP 7 文档包
本手册是文档包“STEP 7 基本信息”的一部分。 下表显示了 STEP 7 文档的总览:
文档 STEP 7 基础信息 • • • • • • STEP 7 V5.3,使用入门手册 使用 STEP 7 V5.3 编程 组态硬件和通讯连接,STEP 7 V5.3 版 本 从 S5 到 S7,变频器手册 用于 S7-300/400 的梯形图(LAD)/功能 块图(FBD)/语句表(STL)手册 S7-300/400 的标准功能及系统功能 提供了参考信息,并描述了编程语 6ES7810-4CA07-8BW1 言 LAD、FBD、STL、标准功能以 及系统功能,扩充了 STEP 7 基础 信息的范围。 用途 订货号
亚洲/澳洲(北京) 技术支持和授权
当地时间: 周一至周五, 8:00 - 5:00 PM 电话: 传真: +86 10 64 75 75 75 +86 10 64 74 74 74 格林威治 标准时间: +8:00
电子邮件: adsupport@
电子邮件: simatic.hotline@
面向工业应用的边缘计算 应用指南-最新国标

目 次2规范性引用文件 (1) 1范围 (1)3术语和定义 (1)3.1工业边缘计算industry edge computing ..........................................13.2工业边缘设备industry edge computing device ...................................13.3工业边缘控制器industry edge controller .........................................13.4工业边缘网关industry edge gateway ............................................13.5工业边缘服务器industry edge server ............................................13.6现场设备field equipment . (24)缩略语 (25)工业边缘计算应用导则...............................................................26工业边缘计算设备选型 (3)6.1工业边缘计算设备分类...........................................................36.2通用功能.......................................................................36.3差异化功能 (37)工业边缘控制器使用 (48)工业边缘网关使用 (49)工业边缘服务器使用.................................................................510工业边缘计算应用模式.. (6)附录A(资料性附录)工业边缘计算网络架构指南.........................................7A.1目标...........................................................................7A.2网络架构.. (7)附录B(资料性附录)工业边缘计算应用场景指南.........................................8B.1应用体系架构...................................................................8B.2应用场景1——过程控制优化......................................................8B.3应用场景2——能效优化..........................................................8B.4应用场景3——预测性维护.. (9)面向工业应用的边缘计算应用指南1范围本标准为工业系统集成商、边缘计算设备供应商、网络运营商在进行面向工业应用的“云-边-端”协同的新型边缘计算方案设计、网络建设、边缘计算设备选型时提供普遍性、原则性、方向性的指导和建议。
电力设施多模态精细化机器人巡检关键技术及应用

电力设施多模态精细化机器人巡检关键技术及应用目录1. 内容简述 (2)1.1 项目背景及意义 (2)1.2 研究现状及挑战 (3)2. 多模态感知技术 (4)2.1 视觉感知技术 (5)2.1.1 高精度图像采集及处理 (7)2.1.2 多视角融合与场景重建 (8)2.1.3 对象识别与实例分割 (9)2.2 激光雷达感知技术 (10)2.2.1 高分辨率点云生成和处理 (12)2.2.2 三维模型建模与配准 (13)2.2.3 空间障碍物检测与分类 (14)2.3 声学感知技术 (16)2.3.1 电器设备噪声识别和故障诊断 (17)2.3.2 环境噪声环境建模和分析 (18)2.4 多模态数据融合与建模 (20)2.4.1 并发感知信息处理 (21)2.4.2 多模态特征融合与多地图构建 (22)3. 精细化巡检路径规划与控制 (23)3.1 巡检任务建模及需求分析 (24)3.2 自适应路径规划算法 (25)3.3 运动控制与导航技术 (27)3.3.1 基于SLAM的精准定位与导航 (29)3.3.2 多种环境适应性控制策略 (30)4. 机器人关键功能开发 (32)4.1 智能躲避与安全巡检 (33)4.2 电力设施缺陷检测与评估 (34)4.2.1 全方位缺陷识别算法 (35)4.2.2 分辨率控制与缺陷测量 (37)4.3 远程操作与数据传输 (38)4.3.1 人机交互与远程控制平台 (39)4.3.2 数据采集、传输与处理 (41)5. 应用场景及未来展望 (42)5.1 现实应用场景及案例研究 (43)5.2 研究方向及未来发展 (45)1. 内容简述本综述文章探讨了电力设施多模态精细化机器人巡检的关键技术及其在实际应用中的重要性。
随着电力系统的日益复杂化和智能化,对电力设施的安全巡检需求也变得更加迫切。
本文首先介绍了电力设施巡检的背景和挑战,然后详细讲解了多模态信息融合、机器人导航与定位、机器视觉和传感器技术等核心技术。
海康威视网络高清监控方案
网络高清视频监控系统标准化解决方案杭州海康威视系统技术有限公司2014年11月目录目录.................................................... 第1章总体概述...........................................1.1设计背景...................................................1.2现状分析...................................................1.3需求说明...................................................1.4设计原则...................................................1.5设计依据................................................... 第2章系统总体设计.......................................2.1设计目标...................................................2.2设计思路...................................................2.3总体结构设计...............................................2.3.1系统逻辑结构.........................................2.3.2系统物理结构.........................................2.4用户价值体现............................................... 第3章前端系统设计.......................................3.1概述.......................................................3.2前端系统结构设计...........................................3.3IPC结构特点................................................3.3.1散热设计.............................................3.3.2防水设计.............................................3.3.3除雾设计.............................................3.3.4防虚焦设计...........................................3.3.5防刮擦设计...........................................3.4IPC功能亮点................................................3.4.1超低照度.............................................3.4.2强光抑制.............................................3.4.3高清透雾.............................................3.4.4红外增强.............................................3.4.5 3D数字降噪 ..........................................3.4.6新一代宽动态.........................................3.4.7 SMART IPC特色功能 ...................................3.5前端配套设施...............................................3.6适用场景描述...............................................3.6.1路面固定点监控.......................................3.6.2出入口监控...........................................3.6.3室内监控.............................................3.6.4制高点监控...........................................3.6.5大场景监控........................................... 第4章监控传输网络设计...................................4.1概述.......................................................4.2设计要求...................................................4.3传输网络设计...............................................4.3.1网络结构设计.........................................4.3.2网络IP地址规划......................................4.3.3 VLAN规划 ............................................4.3.4路由总体规划.........................................4.3.5网络传输带宽要求.....................................4.4网络可靠性设计.............................................4.5网络安全性设计.............................................4.6网络管理规划...............................................4.7设备选型说明............................................... 第5章监控中心系统设计...................................5.1概述.......................................................5.2系统结构设计...............................................5.3存储子系统.................................................5.3.1 NVR存储设计 .........................................5.3.2存储结构设计.........................................5.3.3 NVR存储功能 .........................................5.3.4 NVR存储亮点 .........................................5.3.5设备选型说明.........................................5.4解码拼控子系统.............................................5.4.1视频综合平台设计.....................................5.4.2视频综合平台主要功能.................................5.4.3主要功能效果展示.....................................5.4.4视频综合平台亮点.....................................5.4.5设备选型说明.........................................5.5大屏显示子系统.............................................5.5.1大屏显示子系统结构...................................5.5.2 LCD大屏 .............................................5.5.3 DLP大屏 .............................................5.5.4设备选型说明.........................................5.5.5主要设备选型.........................................5.5.6监控中心及机房配套设施............................... 第6章应用管理系统设计...................................6.1概述.......................................................6.2软件架构设计...............................................6.3.1中心管理模块.........................................6.3.2应用模块.............................................6.3.3客户端模块...........................................6.3.4视频质量诊断模块.....................................6.3.5视频图像拼接模块.....................................6.4平台功能设计...............................................6.4.1基础管理功能.........................................6.4.2基础应用功能.........................................6.4.3高级业务应用.........................................6.5平台部署环境...............................................6.5.1硬件环境.............................................6.5.2软件环境............................................. 第7章视频系统利旧设计...................................7.1概述.......................................................7.2系统利旧整体设计...........................................7.3模拟监控系统接入设计.......................................7.4网络监控系统接入设计....................................... 第8章方案优势分析.......................................8.1全高清.....................................................8.2全网络.....................................................8.4高智能化...................................................8.5高可靠性...................................................8.6高扩展性...................................................8.7高易用性................................................... 第9章应用举例...........................................9.1需求描述...................................................9.2系统设计...................................................9.2.1前端部分设计.........................................9.2.2监控中心设计.........................................9.2.3传输网络设计.........................................9.2.4应用管理软件设计.....................................9.3配置清单...................................................第1章总体概述1.1设计背景从模拟到网络、从标清到高清,随着安防监控技术的不断发展,用户对监控系统的要求越来越高。
北京瑞光部队专网解决方案
14、接口转换器/协议转换器系列 1) IDM STM1/GE 多通道汇聚式网桥 2) IDM GE/STM4 协议转换器 3) IDM GE/63E1 协议转换器 4) IDM STM-1 光电接口转换器 5) IDM CP519 网桥/光猫集中型 6) IDM 16E1/FE、IDM 8E1/FE、IDM 5E1/FE、IDM 4E1/FE、IDM E1/FE 网桥、 7) IDM 16E1/FE-OPT、IDM 8E1/FE-OPT、IDM 5E1/FE-OPT、IDM 4E1/FE-OPT 网桥 (以太网电口和以太网光口) 8) IDM E1-V.35 接口转换器 IDM-ISDNMODEM (双绞线上用 2B1Q 传送 2 个 64K 用户的业务,与 IDM 系列的 ISDN 卡配合使用) 9) IDM-OPTCONV 光纤中继转换设备
北电交换机方案

南京泉野大酒店程控交换机技术建议书上海有限公司二00 年月目录1 系统设计目标 (4)1.1 概述 (4)1.2 系统设计原则 (4)1.2.1 适用性 (4)1.2.2 可靠性 (5)1.2.3 先进性 (5)1.3 系统设计依据 (5)1.4 交换系统设计要点 (6)1.4.1 “无代演进”的设计理念 (6)1.4.2 开放式平台设计 (6)1.4.3 模块化结构 (7)1.4.4 弹性的网络带宽配置 (7)1.4.5 智能化的外围模块 (8)1.4.6 强大的组网能力和功能 (8)1.4.7 丰富而实用的软件功能 (8)1.4.8 强大的ISDN组网能力 (8)1.4.9 面向未来的一体化网络应用产品 (9)2 系统设计说明 (10)2.1 用户需求 (10)2.2 本系统网络接口方式 (10)2.3 系统配置:Meridian 1 Option 11C (10)2.4 Meridian1 OPT性能分析 (11)2.5 Meridian 1 OPT11C介绍 (21)2.6 Meridian 1酒店应用的功能(软件部分) (25)2.6.1 Meridian 1 酒店解决方案 (26)2.6.2 日常语音通信功能 (33)2.7 酒店终端设备 (35)2.7.1 话务台介绍 (36)2.7.2 数字话机介绍 (40)3 机房、设备安装 (45)3.1 机房要求 (45)3.2 机柜安装要求 (45)3.3 电源安装要求 (46)3.4 地线安装要求 (47)4 培训与技术支持 (48)4.1 全球性的技术支持体系 (48)4.2 高素质的售后服务人员和严格的管理制度 (48)4.3 区域性的备件库 (48)4.4 24小时热线和完善的远端维护手段 (48)4.5 多种类维修服务 (49)4.6 完善的人员培训 (49)4.6.1 Meridian 1 安装维护培训 ........................................................................6 工程业绩介绍 (50)6.1 北电网络公司简介 (50)6.2 国内部分酒店用户名单 (51)1 系统设计目标1.1 概述随着社会市场经济、文化、技术的快速发展,酒店业也发生着很大的变化。
施耐德自动化产品介绍

ሏႜ ᆫࣅ
ፌׂิࢅీׂࣅٷၳ୲ ॔੦߾ሏႜጒLjۨᆫ ံपਦ֧փీࠕेᅜํแԍኤ߾ڟڥᆶၳڦ੦
具有规模可延展性、灵活性、集成性、协同性四大特性 规模可延展性 协同性
适应系统改造和升级需求
灵活性
您的系统对于我们来说 都是独一无二的 支持各种客户需要的系统 构架,可以实现从单站点 控制,多站点控制,分布 式控制,集中式控制,离 散控制,过程控制,安全 控制到批量控制的多种控 制方式。
3
Modicon Quantum-性能卓越的高端 自动化平台
概述
Unity Pro
a Socollaborative software
Modicon Quantum 是 PLC 的发明者 Modicon 推出的高端自动化平 台,一经推出,就以其无与伦比的可靠性和稳定性,在全球范围内, 特别是中国市场上取得了巨大的成功。2005 年初施耐德电气推出全 新的 Unity 自动化平台,作为该平台的重要组成部分之一,Modicon Quantum 获得了全面的升级。 作为工厂自动化和过程自动化领域最理想的高端自动化平台, Modicon Quantum 广泛应用于以下领域:
海事组织的认证:
■ 美国 ABS 认证 ■ 法国 BV 认证 ■ 挪威 DNV 认证 ■ 德国 GL 认证 ■ CEI GOST 认证 ■ 英国 LR 认证 ■ CIS 的 RRS 认证
等
4
全面升级的 CPU 的技术特征
随着 Unity 自动化平台的发布, Modicon Quantum 推出 6 款基于 Unity 平台的 CPU。这些 CPU 在指令执行速度,内存容量,通讯性能 和热备性能等方面获得了巨大的突破:
CK4M系列边缘融合控制器方案
CK4M系列边缘融合控制器方案CK4M系列边缘融合控制器是专业的高端图形处理设备,专为大屏幕投影无缝拼接系统而设计,内置多画面图形拼接处理器和融合带生成装置,集视频多窗口处理技术和边缘融合技术为一体,具备视频多窗显示、边缘融合、色差校正、多路信号源选择、输入信号自动调整和预存场景自由调用等功能。
针对不同工程的硬件配置,CK4M提供不同功能的产品来满足不同的应用环境。
任何既定的硬件配置,搭配相应的子系列产品,都可以组成效果最佳、最经济融合方案。
CK4MS融合带生成器,适合与中高端具备边缘融合功能的投影机配合,比如松下PT-DW10000C,PT-D7700C-K,PT-FD570/PT-FD570,巴可ID R600 ,EIKI LC-X6,3D视景SX25+等。
这类投影机本身带光学边缘融合功能,采用CK4MS系列产品,不仅降低了系统成本,而且CK4MS和投影机配合,能够实现极佳的融合效果。
CK4MB基本型融合控制器,适合与所有的投影机配合,完成屏幕的融合显示,该系列产品能有些解决色彩,色度均衡等问题,对于普通的商务投影机也能完成非常好的融合效果。
具备极佳的系统工程性价比。
CK4MH弧形矫正融合器,具备CK4MB的所有功能,而且具有弧形,任意四边形,异形的矫正输出功能。
非常适合于某些特殊的融合项目,比如阶梯形融合,异形融合等等。
CK4ML立体融合控制器,具备CK4MH的所有功能,增加对被动式立体信号的支持,在正常显示立体内容的同时,可以实时显示平面内容,非常适合于仿真系统,立体影院的应用。
一、融合过程信号处理示意图根据现场情况计算好融合带的宽度和比例拼接后的重合部分,在中间产生高亮融合带使用融合器产生消影功能,逐渐消去融合带通过调整融合带的消影位置,逐渐达到融合后的完美效果二、融合拼接器的技术要求1、采用纯硬件架构,脱离PC架构,无需安装任何操作系统即可进行图像处理功能,免除了病毒侵入导致的系统崩溃以及操作软件的版权的问题,除去了购买正版操作软件的费用。
铁路沿线综合视频监控

铁路沿线综合视频监控解决方案目录第一章.概述 (5)1.1 引言 (5)1.2 建设原则 (5)1.3 建设目标 (6)1.4 需求分析 (6)1.5 设计标准和依据 (7)第二章.系统总体设计 (10)2.1 系统整体架构 (10)2.1.1 总体架构 (10)2.1.2 系统网络设计 (11)2.1.3 系统安全性设计 (11)2.1.4 系统接入设计 (12)2.2 业务应用设计 (13)第三章.系统建设方案 (14)3.1 前端监控系统 (14)3.1.1 设计思路 (14)3.1.2 前端系统结构.................................................................... 错误!未定义书签。
3.1.3 前端摄像机一般要求 (18)3.1.4 前端摄像机安装原则 (19)3.2 视频存储系统 (20)3.2.1 设计思路 (20)3.2.2 设计原则 (20)3.2.3 存储技术选择 (21)3.2.4 存储数据流 (22)3.2.5 存储容量计算 (23)3.3 大屏显示系统 (24)3.3.1 设计思路 (24)3.3.2 系统设计 (25)3.3.3 功能特点 (29)3.4 智能行为分析系统 (31)3.4.1 设计思路 (31)3.4.2 系统设计 (31)3.5 智能运维系统 (34)3.5.1 设计思路 (34)3.5.2 系统设计 (34)3.5.3 系统核心功能 (35)3.5.4 系统功能模块 (36)第四章.综合管理平台 (39)4.1 总体思路 (39)4.2 技术路线 (40)4.2.1 模块化设计 (40)4.2.2 系统通信协议结构 (40)4.2.3 设备接入设计 (41)4.2.4 软件平台技术 (41)4.2.5 安全性设计 (41)4.2.6 可扩展性的设计 (42)4.2.7可维护性及易用性的设计 (42)4.3 平台架构 (42)4.4 系统运行环境 (44)4.4.1 系统环境 (44)4.4.2 网络环境 (44)4.5 视频综合管理平台功能 (45)4.5.1 视频应用模块 (45)4.5.2 系统管理模块 (57)第五章.重点产品推荐 (62)5.1 前端监控产品 (62)5.1.1 夜鹰系列(200万像素)超宽动态枪型光纤摄像机.......... 错误!未定义书签。
Fusion4单流控制器

Fusion4单流控制器
佚名
【期刊名称】《传感器世界》
【年(卷),期】2011(17)5
【摘要】霍尼韦尔的Fusion4的单流控制器(SSC)是专门针对石油、石化、炼油、储运和配送领域设计研发的。
该解决方案是首个符合欧盟计量器具指令(MID)的集成添加剂和调和控制器。
它独特的调和算法可以帮助企业达到高精
确度的配比,从而减少不合格调和物和不必要的浪费。
【总页数】1页(P44-44)
【关键词】控制器;计量器具;高精确度;调和;添加剂;指令;算法
【正文语种】中文
【中图分类】TP273
【相关文献】
1.霍尼韦尔Fusion4 MSC-L装载控制器 [J],
2.瑞萨电子推出业界第一颗整合智能型手机近距离无线通信与安全性功能的微控制器\Broadcom推出业界最小和最强大的多端口单芯片10G以太网融合控制器 [J],
3.霍尼韦尔——Fusion4 MSC-A控制器 [J],
4.集成PWM控制器的单芯片PoE控制器 [J],
5.霍尼韦尔集成添加剂和调和控制器Fusion4 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CK4M系列边缘融合控制器方案
CK4M系列边缘融合控制器是专业的高端图形处理设备,专为大屏幕投影无缝拼接系统而设计,内置多画面图形拼接处理器和融合带生成装置,集视频多窗口处理技术和边缘融合技术为一体,具备视频多窗显示、边缘融合、色差校正、多路信号源选择、输入信号自动调整和预存场景自由调用等功能。
针对不同工程的硬件配置,CK4M提供不同功能的产品来满足不同的应用环境。
任何既定的硬件配置,搭配相应的子系列产品,都可以组成效果最佳、最经济融合方案。
CK4MS融合带生成器,适合与中高端具备边缘融合功能的投影机配合,比如松下PT-DW10000C,PT-D7700C-K,PT-FD570/PT-FD570,巴可ID R600 ,EIKI LC-X6,3D视景SX25+等。
这类投影机本身带光学边缘融合功能,采用CK4MS系列产品,不仅降低了系统成本,而且CK4MS和投影机配合,能
够实现极佳的融合效果。
CK4MB基本型融合控制器,适合与所有的投影机配合,完成屏幕的融合显示,该系列产品能有些解决色彩,色度均衡等问题,对于普通的商务投影机也能完成非常好的融合效果。
具备极佳的系统工程性价
比。
CK4MH弧形矫正融合器,具备CK4MB的所有功能,而且具有弧形,任意四边形,异形的矫正输出功能。
非常适合于某些特殊的融合项目,比如阶梯形融合,异形融合等等。
CK4ML立体融合控制器,具备CK4MH的所有功能,增加对被动式立体信号的支持,在正常显示立体内容的同时,可以实时显示平面内容,非常适合于仿真系统,立体影院的应用。
一、融合过程信号处理示意图
根据现场情况计算好融合带的宽度和比例
拼接后的重合部分,在中间产生高亮融合带
使用融合器产生消影功能,逐渐消去融合带
通过调整融合带的消影位置,逐渐达到融合后的完美效果
二、融合拼接器的技术要求
1、采用纯硬件架构,脱离PC架构,无需安装任何操作系统即可进行图像处理功能,免除了病毒侵入导致的系统崩溃以及操作软件的版权的问题,除去了购买正版操作软件的费用。
要求上电即能工作,开机不超
过5秒。
关机只需断电。
2、输入信号:标准配置支持5路电脑VGA信号,5路复合视频AV信号。
电脑信号要求支持多种分辨率,最高可支持1920×1400@60HZ,32全彩的输入信号,AV信号支持N制和PAL制式输入信号,包括DVD
输入和摄像头的视频信号。
3、信号识别:对于输入信号,处理器能够自动识别,无需再次使用软件调节参数,即插即用,且同步显示。
4、融合宽度:要求可以任意设定融合带宽度。
5、融合处理:要求融合带过度平滑,融合后两边的颜色过渡达到一致,融合部分无颜色突变,亮度突变。
内置多种伽马渐变曲线模式,同时也支持用户自定义模式,用户可以根据自主的需求,在256级范围内
进行调整。
6、色彩调整:能够支持调整每个单屏输出的色彩变化,包括亮度,对比度,色温的亮暗平衡的调整。
7、输出显示:输出显示要求支持XGA,SXGA的输出格式,32全彩输出,刷新率不得低于60HZ。
8、开窗功能:要求在单个的投影输出上,能够开出不少于4个的窗口,窗口内容可任意选择VGA或AV
信号,且每个窗口都能实现漫游,缩放,拖拉,改变透视度的功能。
9、环境要求:要求能够实现一周连续7天24小时开机工作无故障。
三、投影设备的要求
1、亮度:5000流明以上,2000:1的对比度以上
2、颜色:要求256色伽玛灰阶变化正常,显示没有颜色突变,色彩异常的现象,这样就可以保证在融合
带部分可以色彩不会出现突变。
3、伽玛值:要求两台投影机伽玛曲线变化一直,直观的看就是在纯白色,纯黑色,纯蓝色,纯红色,纯绿色下色彩一直,并且在各种输出比例的灰色下颜色一致,以便融合后达到色彩平滑过渡的一个技术保证。
四、对于投影幕的要求
1、投影幕的屏幕增益最好在0.8~1.8之间,低增益可以减小融合叠加区域的黑亮效应。
同时能够提高前视范围内可视角。
同时能够减小投影机中心投射的太阳效应(即正对位置特别的亮,周围亮度递减)。
2、要求采用整张幕,不宜使用两块拼接幕,这样可以避免中间的物理缝隙,中间的物理缝隙会因为反射偏
角的不同,在中心位置产生一条黑线。
CK4M系统连接图
特点介绍
1、自生成融合带
CK4M根据无缝拼接和显示的特性,自生成融合所需要的重复数据带,在不同投影显示单元之间构筑融合所需要的叠加重复显示区域。
根据产品的特性,融合带的宽度为0--1024像素点。
2、融合带处理
融合边带处理功能主要实现数字光学拼缝消融,CK4M内置多种伽马渐变曲线模式,同时也支持用户自定义模式,用户可以根据自主的需求,在256级范围内进行调整。
3、自动色彩均衡
自动色彩均衡功能可消除投影设备间的颜色和亮度差异,保证投出的大画面色彩均一、亮度一致。
4、先进的纯硬件设计架构
与基于计算机的融合处理器方案不同,CK4M系列采用了纯全硬件信号处理和总线架构模块设计。
不需要操作系统支持,上电即可工作,开机时间少于5秒, 用户可直接硬开机和关机,启动迅速, 满足每周七
天、每天24小时的工作需求,系统稳定可靠。
5、场景预设
CK4M拼接融合器可以预设不同的场景,供实际使用时调用,也可以把预设的模式和中控系统有机地整
合为一体。
6、窗口控制
CK4M可以实现窗口的画外画平铺,叠加,漫游,透视,缩放,任意移动等功能。
a)画外画平铺模式—多路或者部分信号以任意矩形显示格式全屏或非全屏显示在背景底图上显示,显示画
面之间没有任何重叠,如下图2;
b)画中画模式—在高清背景图片上,其他信号采用开窗口平铺显示,如下图
c)叠加模式—各窗口之间相互部分或者全部覆盖;
d) 透视模式—在做画中画叠加模式时,可以设定上一层显示窗口的透明度,可观察到上层窗口显示的通道信
号同时,也可以直观看到下层信号的完整画面.
e) 缩放和位移.窗口的大小和位置任意变换和移动;
7.高清晰底图显示
融合机可以实现高清晰背景底图显示(需要预定),支持底图输出时,融合机输出分辨率只能固定为:
1024×768;
8.支持超过分辨率文档高清显示
融合机器支持对2048×768、3072×768的超过分辨率文档点对点无损显示;
控制软件
融合控制器采用新一代可视化、所见即所得操控软件ApplicationPro, 该软件整合拼接控制和窗口控制为一体,可以方便完成对场景的预设、调用、窗口的控制、信号通道选择,隐含矩阵控制等功能。
具体功能见
软件操作说明书。
简洁的全中文操作界面,见下图:
主要技术指标。