无人机解决方案操作手册
无人机作业指导书最新版
.成都翼高九天科技有限公司无人机操作手册第一版精选范本.第一章引言 (1)一、编制背景 (1)二、适用范围 (1)三、无人机巡线试飞基本要求 (1)四、引用标准 (2)第二章任务准备 (3)一、接到任务后准备工作 (3)二、设备领取 (3)三、工作确定 (4)第三章作业流程 (4)一、作业保障 (4)1.首要保证 (4)2.作业环境保障 (4)3.飞行安全保障 (5)4.作业危险点分析及避免方法 (6)二、正式作业 (7)1. 起飞前准备 (7)2.起飞作业 (8)3.不同塔型拍摄内容及方式: (10)3. 飞机回收 (14)三、数据处理 (15)1.无人机自身数据 (15)2.作业数据 (15)第四章附表 (15)一、作业设备清单 (16)二、无人机标准化作业卡 (16)三、无人机作业情况报告表 (16)四、无人机作业资料整理清单 (16)精选范本.成都翼高九天科技有限公司无人机操作手册第一章引言一、编制背景本手册为规范无人机操作规程,保证无人机的正确保管和使用,以及操作人员的人生安全,作业对象的安全和作业的顺利完成。
二、适用范围本指导书适用于成都翼高九天科技有限公司无人机飞行小组人员对线路巡视的正常飞行巡检工作。
三、无人机巡线试飞基本要求1.新建输电线路巡视重点:螺栓、线夹、金具、接续管、标牌、绝缘子的安装紧固情况。
2.巡线环境(1)、平原地区(2)、山下巡查山上线路(3)、同一走廊有平行杆塔和线路(4)、交叉跨越精选范本.3.杆塔类型(1)、单回直线塔(2)、单回耐张塔(3)、同杆多回直线塔(4)、同杆多回耐张塔4.总体原则遵循由易至难的巡视顺序,避免不必要的损失5.辅助工作巡视轨迹记录、巡资料与电力设备对应关系记纪录、飞行过程影像资料拍摄四、引用标准《架空输电线路运行规程》DL/T741-2010《架空输电线路直升机巡视技术导则》DL/T288-2012《电业安全工作规程》(电力线路部分)DL 409—2005《架空送电线路运行规程》DL/T 741—2010《架空输电线路管理规范》(试行)国家电网生[2003]481号《国家电网公司电力安全工作规程》(电力线路部分)国家电网安监[2009]664号精选范本.精选范本第二章任务准备一、接到任务后准备工作某小组接到任务后,该小组成员应当做如下准备工作:1.确定作业前往地点、时间。
SVS无人机操作手册
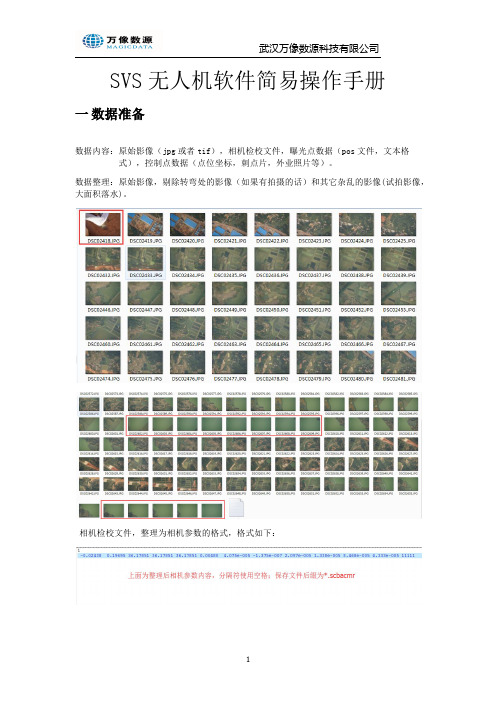
SVS无人机软件简易操作手册一数据准备数据内容:原始影像(jpg或者tif),相机检校文件,曝光点数据(pos文件,文本格式),控制点数据(点位坐标,刺点片,外业照片等)。
数据整理:原始影像,剔除转弯处的影像(如果有拍摄的话)和其它杂乱的影像(试拍影像,大面积落水)。
相机检校文件,整理为相机参数的格式,格式如下:曝光点数据整理,检查曝光点数据和影像数量是否一致,必须影像有对应的曝光点数据,影像可以比曝光点数据少,但是不能多于曝光点数据,pos数据的影像名称中不要带后缀(*.jpg,*.tif)。
控制点文件,整理为如下格式:第一行为控制点总数量,每一列依次为ID,X,Y,H,控制点属性(平高点使用数字1)二预处理设置原始影像目录,预处理后保存的目录,加载相机文件:导入GPS/IMU信息:修改ID名称和影像名称一致,这里必须保证影像和pos数据对应,所以影像的名称和导入的pos的ID必须对应。
修改方法:在右侧的ID属性栏修改,将默认的前缀IMG_改成和原始影像对应的DSC0,一个“#”代表一个替代的字符,根据影像数字长短修改,如:影像名称最大到DSC0999,相应的改为DSC0###,去掉一个#;起始编号修改为与第一张影像相同的编号,必须保证影像和pos都是连续的没有中断的,否则就要手动编辑pos文件。
修改完成后必须点击“更改所有项”才能生效。
指定属性列:根据导入的pos数据,指定相应列的属性。
不需要的列可以不指定属性。
操作方法:在每列的顶上单击,弹出属性赋值对话框。
选择对应的属性即可。
关于Omega,phi,Kappa角度的指定:一般的pos信息,这个三个角度信息都是有的,也是按照Omega,Phi,Kappa来排列的,但是不排除特殊情况;Omega,Phi指定错误没关系,Kappa角一定要正确。
分辨Kappa角的时候,观察整列数据,一般两条航带之间相差约180度的就是Kappa角。
如下图:属性指定完成后,可以三维浏览pos数据,根据显示的影像号,记住第一条航带的飞行方向(影像ID从小到大的方向),是从左到右,还是从右到左。
无人机作业指导书最新版
.成都翼高九天科技有限公司无人机操作手册第一版精选范本.第一章引言 (1)一、编制背景 (1)二、适用范围 (1)三、无人机巡线试飞基本要求 (1)四、引用标准 (2)第二章任务准备 (3)一、接到任务后准备工作 (3)二、设备领取 (3)三、工作确定 (4)第三章作业流程 (4)一、作业保障 (4)1.首要保证 (4)2.作业环境保障 (4)3.飞行安全保障 (5)4.作业危险点分析及避免方法 (6)二、正式作业 (7)1. 起飞前准备 (7)2.起飞作业 (8)3.不同塔型拍摄内容及方式: (10)3. 飞机回收 (14)三、数据处理 (15)1.无人机自身数据 (15)2.作业数据 (15)第四章附表 (15)一、作业设备清单 (16)二、无人机标准化作业卡 (16)三、无人机作业情况报告表 (16)四、无人机作业资料整理清单 (16)精选范本.成都翼高九天科技有限公司无人机操作手册第一章引言一、编制背景本手册为规范无人机操作规程,保证无人机的正确保管和使用,以及操作人员的人生安全,作业对象的安全和作业的顺利完成。
二、适用范围本指导书适用于成都翼高九天科技有限公司无人机飞行小组人员对线路巡视的正常飞行巡检工作。
三、无人机巡线试飞基本要求1.新建输电线路巡视重点:螺栓、线夹、金具、接续管、标牌、绝缘子的安装紧固情况。
2.巡线环境(1)、平原地区(2)、山下巡查山上线路(3)、同一走廊有平行杆塔和线路(4)、交叉跨越精选范本.3.杆塔类型(1)、单回直线塔(2)、单回耐张塔(3)、同杆多回直线塔(4)、同杆多回耐张塔4.总体原则遵循由易至难的巡视顺序,避免不必要的损失5.辅助工作巡视轨迹记录、巡资料与电力设备对应关系记纪录、飞行过程影像资料拍摄四、引用标准《架空输电线路运行规程》DL/T741-2010《架空输电线路直升机巡视技术导则》DL/T288-2012《电业安全工作规程》(电力线路部分)DL 409—2005《架空送电线路运行规程》DL/T 741—2010《架空输电线路管理规范》(试行)国家电网生[2003]481号《国家电网公司电力安全工作规程》(电力线路部分)国家电网安监[2009]664号精选范本.精选范本第二章任务准备一、接到任务后准备工作某小组接到任务后,该小组成员应当做如下准备工作:1.确定作业前往地点、时间。
无人机运行手册飞行器安全与应急处理策略
无人机运行手册飞行器安全与应急处理策略随着科技的发展,无人机作为一种高新技术产品,被广泛应用于航拍、农业、消防、救援等领域。
然而,无人机的操作并非一件简单的
事情,需要严格按照操作手册来进行。
本文旨在为用户提供一份完整
的无人机运行手册,包括飞行器安全与应急处理策略,以确保无人机
的安全运行。
一、飞行器安全策略
1. 熟悉无人机的基本结构和功能,确保在操作过程中能准确掌握无
人机的各项功能;
2. 在飞行前进行全面的设备检查,确保电量充足、遥控器联通良好、无人机结构完好无损;
3. 选择合适的起飞地点,避免飞行时受到外界干扰,确保无人机起
飞和降落平稳;
4. 飞行过程中注意天气状况,避免在恶劣天气条件下飞行,确保无
人机的稳定性和安全性;
5. 遵守当地法律法规,不擅自越过禁飞区、违规飞行,以免造成不
必要的事故。
二、应急处理策略
1. 在出现无人机失控或其他异常情况时,首先保持冷静,切勿慌乱
操作;
2. 如果无人机出现飞行异常,应立即降低高度,尽量远离人群密集地区;
3. 根据实际情况调整无人机飞行轨迹,确保无人机安全着陆;
4. 当无人机出现故障无法远程操控时,及时向相关部门报告并采取必要的措施,避免造成二次事故。
无人机的运行需要遵循一定的原则和规范,严格按照操作手册进行操作能够最大程度地保证飞行安全。
同时,建议用户在飞行前进行充分的准备和培训,提高飞行技术和应对紧急情况的能力,从而避免不必要的飞行事故发生。
希望本文所述的无人机运行手册能够帮助用户更好地操作和管理无人机,确保飞行安全。
无人机产品手册

无人机产品手册
无人机产品手册是为了帮助用户更好地了解和使用无人机而设计的,包含了无人机的所有重要信息和使用指南。
以下是一个无人机产品手册的基本内容:
1. 产品概述:简要介绍无人机的类型、功能和应用领域,以及产品的特点和优势。
2. 产品规格:详细列出无人机的各项规格参数,包括机身尺寸、重量、飞行时间、最大飞行速度、控制距离等。
3. 结构组成:介绍无人机的整体结构和各部分组件,如机身、机翼、电池、摄像头等。
4. 工作原理:阐述无人机的工作原理,包括飞行控制系统、导航系统、传感器等的工作原理。
5. 使用步骤:详细介绍无人机的使用步骤,包括起飞、飞行控制、降落等操作。
6. 安全须知:介绍使用无人机时需要注意的安全事项,如遵守飞行规则、避免干扰敏感区域等。
7. 维护保养:提供无人机的日常维护和保养建议,以确保其正常工作和延长使用寿命。
8. 常见问题及解决方案:列出无人机可能出现的问题和解决方法,方便用户自行排查和解决。
9. 售后服务:提供公司的售后服务政策、保修期限和维修服务网点等信息。
10. 附录:包含有关无人机的其他重要信息,如相关法规、术语解释等。
以上是一个无人机产品手册的基本内容,具体内容可根据产品的特点和用户需求进行调整和补充。
在编写无人机产品手册时,需要注意语言简练明了,图文并茂,方便用户阅读和使用。
无人机解决方案操作手册模板
无人机解决方案操作手册无人机数据处理完整解决方案操作手册目录1 产品特点 .................................................................. 错误!未定义书签。
1.1 无人驾驶小飞机项目情况简介.................... 错误!未定义书签。
1.2 数据处理软件技术指标 ............................... 错误!未定义书签。
1.3 硬件设备要求 ............................................... 错误!未定义书签。
1.4 处理软件要求 ............................................... 错误!未定义书签。
1.5 数据要求....................................................... 错误!未定义书签。
2 数据处理操作流程 .................................................. 错误!未定义书签。
2.1 数据处理流程图 ........................................... 错误!未定义书签。
2.2 空三加密....................................................... 错误!未定义书签。
2.2.1 启用软件FlightMatrix ............................. 错误!未定义书签。
2.2.1.1创立Flightmatrix工程错误!未定义书签。
2.2.1.2设置工程选项参数错误!未定义书签。
2.2.1.3自动化处理错误!未定义书签。
2.2.1.4DATMatrix交互编辑错误!未定义书签。
2.2.1.5调用PATB进行平差解算错误!未定义书签。
cx32无人机操作说明
cx32无人机操作说明第一部分:无人机介绍cx32无人机是一款多功能的航拍无人机,具备稳定的飞行性能和高清摄像能力。
它采用了先进的飞控系统和无线遥控技术,能够实现精准的飞行控制和远程操控。
第二部分:无人机组装1. 打开无人机包装盒,将无人机主体取出,并确保所有配件齐全。
2. 将无人机电池插入主机底部的电池槽中,并用电池锁固定好。
3. 安装无人机的四个螺旋桨,注意螺旋桨的方向,确保安装正确。
4. 将遥控器的电池插入遥控器背部的电池槽中,并确保电池极性正确。
第三部分:无人机起飞前的准备1. 在室外开阔的地方进行起飞准备,确保周围没有障碍物和人员。
2. 打开遥控器电源开关,然后打开无人机电源开关。
3. 等待无人机与遥控器建立连接,连接成功后,遥控器上的LED灯会亮起。
第四部分:无人机基本操作1. 起飞:将油门杆向上推,无人机会开始垂直起飞,当无人机离地后,松开油门杆,无人机会悬停在空中。
2. 前进/后退:将左操纵杆向前推或向后拉,无人机会相应地向前或向后飞行。
3. 左转/右转:将左操纵杆向左推或向右推,无人机会相应地向左或向右旋转。
4. 上升/下降:将右操纵杆向上推或向下拉,无人机会相应地向上或向下飞行。
5. 悬停:将油门杆推到中间位置,无人机会停止飞行并悬停在空中。
6. 一键返航:按下遥控器上的一键返航按钮,无人机会自动返回起飞点附近并降落。
第五部分:无人机拍摄功能1. 拍照:按下遥控器上的拍照按钮,无人机会拍摄当前位置的照片,并保存在无人机内存卡中。
2. 录像:按下遥控器上的录像按钮,无人机会开始录制当前位置的视频,并保存在无人机内存卡中。
第六部分:无人机安全操作提示1. 不要在人群密集的地方飞行无人机,以免造成人员伤害。
2. 飞行时要注意周围环境,避免与建筑物、电线等障碍物发生碰撞。
3. 飞行过程中如遇到强风等恶劣天气,请及时返航并降落。
4. 飞行距离不要超过无人机的遥控范围,以免失去控制。
5. 飞行前要检查无人机电量是否充足,避免电量不足导致意外情况发生。
无人机操作指南说明书
MINISTERIODE TRANSPORTES, MOVILIDAD Y AGENDA URBANAGUÍA PARA LA PRESENTACIÓN DE UNA DECLARACIÓN OPERACIONAL.(Art. 5 Reglamento de Ejecución (UE) 2019/947 de la Comisión, de 24 de mayo de 2019)(Versión 3, 31/03/2022)1. INTRODUCCIÓNDe acuerdo con lo establecido en el artículo 5 del Reglamento de Ejecución (UE) 2019/947 de la Comisión, de 24 de mayo de 2019, antes de la realización de operaciones de UAS en la categoría «específica» es necesario que el operador de UAS registrado en España obtenga una autorización operacional expedida por la Agencia Estatal de Seguridad Aérea (en adelante, AESA) o presente una declaración respecto a una operación que se ajuste a un escenario estándar, europeo o nacional, según corresponda.No se exigirá una autorización operacional o una declaración a aquellos operadores de UAS que posean un certificado de operador de UAS ligeros (LUC) con las facultades adecuadas.2. DECLARACIÓN OPERACIONALLos operadores de UAS podrán presentar ante AESA una declaración operacional de conformidad con un escenario estándar si su operación se puede acomodar dentro de alguno de los escenarios estándar publicados.Un escenario estándar es un tipo de operación de UAS dentro de la categoría «específica» respecto a la cual se ha determinado una lista precisa de medidas de atenuación.Los operadores de UAS podrán presentar declaraciones operacionales de conformidad con los escenarios estándar nacionales (STS-ES) publicados por AESA hasta el 31 de diciembre de 2023. Tales declaraciones dejarán de ser válidas el 31 de diciembre de 2025.A partir del 1 de enero de 2024, los operadores de UAS podrán presentar declaraciones operacionales de conformidad con los escenarios estándar europeos recogidos en el anexo I del Reglamento de Ejecución (UE) 2019/947 de la Comisión.2.1. ESCENARIOS ESTÁNDAR NACIONALES (STS-ES)En el ámbito de las operaciones de UAS a las que les es aplicable el Reglamento de Ejecución (UE) 2019/947 de la Comisión, AESA ha aprobado dos escenarios estándar nacionales (STS-ES) de aplicación únicamente en España (un STS-ES NO habilita para realizar ese tipo de operaciones en otro estado miembro de EASA).Estos escenarios estándar nacionales son análogos a los escenarios estándar europeos, con la salvedad principal de lo relativo al marcado CE y la identificación de clase. Así, para lograr un nivel equivalente de seguridad, se establecen una serie de requisitos técnicos y limitaciones operacionales adicionales.2.1.1.STS-ES-01. VLOS sobre una zona terrestre controlada en un entornopobladoPara operar al amparo de este escenario estándar nacional se debe cumplir con todos los requisitos y limitaciones definidos en el mismo. Pueden consultarse (aquí).A modo de resumen, se destaca lo siguiente:•Operaciones en entorno urbano sobre una zona terrestre controlada. Se define la zona terrestre controlada como aquella zona terrestre en la que se utiliza el UAS y en la que eloperador de UAS puede garantizar que solo estén presentes las personas participantes;•En un espacio aéreo no controlado(clase F o G), o en un espacio aéreo controlado, de conformidad con los procedimientos publicados respecto a la zona de la operación, deforma que esté garantizada la baja probabilidad de encontrar aeronaves tripuladas.• A una distancia máxima de 120 m del punto más cercano en la superficie terrestre;•Dentro del alcance visual del piloto VLOS a una distancia horizontal inferior a 100 m del piloto a distancia;•La aeronave no tripulada no llevará mercancías peligrosas;• A una velocidad respecto al suelo inferior a 5 m/s;•Por un piloto a distancia con los conocimientos teóricos y prácticos definidos para este escenario estándar, utilizando una única aeronave no tripulada a la vez y nunca desde unvehículo en movimiento;•Con una aeronave no tripulada con una MTOM inferior a 10kg que cumpla unos requisitos técnicos específicos;•De conformidad con el manual de operaciones del operador de UAS;2.1.2.STS-ES-02. BVLOS con observadores del espacio aéreo sobre una zonaterrestre controlada en un entorno poco pobladoPara operar bajo este escenario estándar se debe cumplir con todos los requisitos definidos en el mismo. Pueden consultarse (aquí).A modo de resumen, se destaca lo siguiente:•Operaciones en entorno poco poblado sobre una zona terrestre controlada;•En una zona en la que la visibilidad de vuelo mínima sea superior a 5 km;•En un espacio aéreo no controlado(clase F o G), previa publicación, con antelación suficiente, de un NOTAM para operaciones a más de 60 m de distancia del punto más cercanoen la superficie terrestre, o en un espacio aéreo controlado, de conformidad con losprocedimientos publicados respecto a la zona de la operación, de forma que estégarantizada la baja probabilidad de encontrar aeronaves tripuladas;• A una distancia máxima de 100 m del punto más cercano en la superficie terrestre;•La aeronave no tripulada no llevará mercancías peligrosas;• A una velocidad respecto al suelo inferior a 33 m/s;•Se realicen de conformidad con el manual de operaciones del operador de UAS;•Por un piloto a distancia con los conocimientos teóricos y prácticos definidos para este escenario estándar, utilizando una única aeronave no tripulada a la vez y nunca desde unvehículo en movimiento;•Con una aeronave no tripulada de MTOM inferior a 25kg que cumpla unos requisitos técnicos específicos;•Con la aeronave no tripulada visible para el piloto a distancia durante su lanzamiento y recuperación;•Si en ellas no interviene ningún observador del espacio aéreo, con la aeronave no tripulada volando a una distancia máxima de 1 km del piloto a distancia, y siguiendo una trayectoriaprogramada previamente cuando el piloto a distancia no la tenga en modo VLOS;•Si en ellas intervienen uno o varios observadores del espacio aéreo, cumpliendo las condiciones siguientes:—los observadores del espacio aéreo están colocados de forma que cubran adecuadamente el volumen operacional y el espacio aéreo circundante;—la aeronave no tripulada no se utiliza a más de 2 km del piloto a distancia;—la aeronave no tripulada no se utiliza a más de 1 km del observador del espacio aéreo más próximo a ésta;—la distancia entre cualquiera de los observadores del espacio aéreo y el piloto a distancia no es superior a 1 km;—se dispone de medios de comunicación sólidos y eficaces entre el piloto a distancia y los observadores del espacio aéreo.2.2.PROCEDIMIENTO DE PRESENTACIÓN DE UNA DECLARACIÓNLos operadores de UAS que deseen acogerse a un escenario estándar deberán presentar una declaración operacional de manera telemática a través de la sede electrónica de AESA (aquí):Para ello, es necesario seguir los siguientes pasos:1)Darse de alta como usuario en la sede electrónica de AESA.2)Una vez recibida la confirmación del alta, realizar la inscripción en el registro de operadores de UASdesde la misma aplicación. Se obtendrá en este punto un número de operador de UAS unívoco.3)Presentar la declaración operacional, incluyendo:a)Información administrativa actualizada sobre el operador de UAS;b)Las aeronaves no tripuladas que se utilizarán en el escenario estándar seleccionado;c)Una declaración de que la operación cumple los requisitos operacionales descritos en elescenario;d)El compromiso por parte del operador de UAS de aplicar todas las medidas de atenuaciónnecesarias para la seguridad de la operación, ye)Confirmación por parte del operador de UAS de que se dispondrá de un seguro adecuadopara cada vuelo realizado en el marco de la declaración.Esta declaración responsable podrá presentarse de dos formas distintas:•Acceso con certificado digital (obligatorio en caso de personas jurídicas): Mediante esta opción se permite cumplimentar todos los datos, firmarlos digitalmente, y presentar solicitudes de forma automática en AESA. Al finalizar el proceso, se obtendrá un justificante en formato PDF del Registro Telemático de AESA en el que se refleja la información presentada.•Acceso sin certificado digital: Esta opción permite cumplimentar los datos del operador y generar declaraciones. En el caso de personas físicas que opten por realizar el trámite sin certificado digital, se precisará imprimir la declaración y presentarla debidamente firmada a través de uno de los siguientes medios dirigida a:División de UASAgencia Estatal de Seguridad AéreaPaseo de la Castellana, 112. 28046 (Madrid)a)En el Registro General de AESA o en su oficina de asistencia en materia de registro.b)En los registros u oficinas de asistencia en materia de registros de cualquier órganoadministrativo, que pertenezca a la Administración General del Estado, a la de cualquierAdministración de las Comunidades Autónomas, a la de cualquier Administración de lasDiputaciones Provinciales, Cabildos y Consejos Insulares, a los Ayuntamientos de losMunicipios a que se refiere el artículo 121 de la Ley 7/1985, de 2 de abril, reguladora de lasBases del Régimen Local, o a la del resto de las entidades que integran la AdministraciónLocal si, en este último caso, se hubiese suscrito el oportuno convenio.c)En las oficinas de Correos, mediante correo certificado administrativo.d)En las representaciones diplomáticas u oficinas consulares de España en el extranjero.e)En cualquier otro que establezcan las disposiciones vigentes.Una vez recibida la declaración, AESA verificará que contiene todos los elementos necesarios y, automáticamente, proporcionará al operador de UAS una confirmación a través de la aplicación web en formato de PDF de que la ha recibido y de que está completa. Una vez recibida dicha confirmación, el operador de UAS podrá iniciar la operación.2.3.DOCUMENTACIÓN.Si bien el operador de UAS no deberá presentar documentación ante AESA, estará obligado, en cambio, a disponer y conservar a disposición de AESA los documentos necesarios para justificar el cumplimiento con lo especificado en el escenario estándar correspondiente.2.4.EFICACIA DE LA DECLARACIÓN.Las declaraciones de escenarios estándar nacionales serán válidas y se podrá operar de acuerdo con lo declarado hasta el 31 de diciembre de 2025.Las declaraciones de escenarios estándar europeos serán válidas mientras el operador de UAS cumpla los requisitos aplicables de los Reglamentos europeos y las condiciones del escenario estándar correspondiente.2.5.MODIFICACIÓN DE UNA DECLARACIÓN.Los operadores de UAS notificarán sin demora indebida a AESA cualquier cambio en la información incluida en la declaración operacional que hayan presentado.。
无人机传输系统用户手册说明书
多旋翼专业级无人机使用手册专注应急通信,持续引领创新版权所有不得复制目录一、免责声明 (3)二、无人机—飞行器 (4)2.1、无人机组成 (4)2.2、无人机接口图示 (6)2.3、挂载安装 (7)三、无人机—智能遥控器 (8)四、挂载介绍 (10)4.1无人机—变焦云台(30倍) (11)4.2无人机—机载喊话器 (14)4.3无人机—抛投器 (19)4.4无人机—探照灯 (21)4.5无人机—锂聚合物电池及电池充电器 (23)五、智能遥控器使用说明 (28)六、飞行安全 (36)七、起飞准备 (38)7.1.静态检查 (38)7.2.安装电池及起落架 (38)7.3.安装挂载 (40)7.4.安装机臂 (40)7.5.参数检查 (41)7.6.挂载控制 (45)八、无人机起飞 (46)九、飞机降落 (48)十、常见问题解答 (48)十一、法律法规 (49)售后服务 (50)一、免责声明危险首先感谢您使用慧明捷科技有限公司无人机设备。
它融合了高科技精华、外观精美、图传覆盖面积广。
希望它能给您的工作带来无限的便捷。
在使用无人机图传设备前,请仔细阅读本须知,一旦使用即被视为本声明内部已经全部认可与接受。
请严格遵守用户手册安装和使用该产品。
特别声明:由于本产品新手操作,十分危险。
飞行员必须经过慧明捷科技有限公司的培训,并且在考核通过之后才能操作。
在未通过考核便擅自操作的情况下所造成的损害或损伤,慧明捷科技有限公司将不承担相应的损失及赔偿责任。
警告请把电器部件放在儿童触及范围之外;确保飞行器飞行时远离人群及危险物品,建议您在专用的飞行场地飞行;切勿在饮酒、疲劳或其他精神状态不佳的情况下进行任何操作;请严格按产品手册进行操作;飞行前请确保供电系统及其他功能模块连接正确,否则可能造成设备的烧毁;遥控器通道校准、固件升级、参数设置前请关闭动力电源或取下螺旋桨,防止电机突然高速旋转;切勿在恶劣环境下飞行;请勿改变机架的结构,如改变,后果自负1.本产品为特殊控制物项,用户将为使用本产品的一切行为负全部责任,对于直接或间接使用本产品造成的后果厂家不承担任何责任。
无人机用户手册
无人机用户手册欢迎使用无人机!作为一名无人机用户,您的安全和顺利操作是我们的首要关注。
为了确保您能充分了解和正确使用无人机,我们为您准备了本用户手册。
请仔细阅读以下内容,并按照指示操作。
一、安全须知1. 在操作之前,请务必了解并遵守当地法律法规,特别是关于无人机使用的规定。
2. 在飞行之前,请确保您的无人机电池已充满,并检查无人机的各项部件是否完好无损。
3. 飞行时,请勿靠近机动车、行人密集区域、建筑物等人群密集区域,以免发生意外。
4. 请确保无人机飞行高度在法律允许范围内,并避免违规飞行。
二、快速上手1. 打开无人机电源开关,确保无人机和遥控器处于开机状态。
2. 手动控制遥控器上的升降杆,使无人机开始飞行。
注意飞行姿态的平稳。
3. 使用遥控器上的摇杆控制无人机的前进、后退、左转、右转等动作。
4. 练习操控无人机时,尽量选择开阔、无障碍物的地方,并保持视线良好。
三、摄像操作1. 若您的无人机配备了摄像功能,请确保摄像头镜头清洁,并正确安装在无人机上。
2. 在操作无人机摄像时,请注意光线条件,尽量避免拍摄过亮或过暗的环境。
3. 您可以通过遥控器上的按钮进行拍照或录像。
请在操作前确认存储设备有足够的容量。
4. 在使用摄像功能时,请尊重他人隐私,遵守法律法规。
四、飞行技巧1. 初次操作无人机时,请选择风力较小的天气条件,以减少对飞行的影响。
2. 飞行过程中,请保持无人机与遥控器的信号连接稳定,避免遥控器与无人机距离过远。
3. 飞行时,请提前规划好航线,避免出现障碍物和危险区域。
4. 若遇到紧急情况,请按下遥控器上的紧急停机按钮,并采取相应措施以确保安全。
五、维护保养1. 请定期清洁无人机的机身和摄像设备,以确保机器的正常功能。
2. 使用适当的无人机保护套,以减少对无人机的损坏。
3. 若发现无人机出现故障,请及时联系售后服务中心,不要私自拆解或修复无人机。
六、其他注意事项1. 请在允许的飞行区域内使用无人机,避免侵犯他人隐私权。
无人机作业指导书V
成都翼高九天科技有限公司无人机操作手册第一版第一章引言 (1)一、编制背景 (1)二、适用范围 (1)三、无人机巡线试飞基本要求 (1)四、引用标准 (2)第二章任务准备 (3)一、接到任务后准备工作 (3)二、设备领取 (3)三、工作确定 (4)第三章作业流程 (4)一、作业保障 (4)1.首要保证 (4)2.作业环境保障 (4)3.飞行安全保障 (5)4.作业危险点分析及避免方法 (6)二、正式作业 (7)1. 起飞前准备 (7)2.起飞作业 (8)3.不同塔型拍摄内容及方式: (10)3. 飞机回收 (14)三、数据处理 (15)1.无人机自身数据 (15)2.作业数据 (15)第四章附表 (15)一、作业设备清单 (16)二、无人机标准化作业卡 (16)三、无人机作业情况报告表 (16)四、无人机作业资料整理清单 (16)成都翼高九天科技有限公司无人机操作手册第一章引言一、编制背景本手册为规范无人机操作规程,保证无人机的正确保管和使用,以及操作人员的人生安全,作业对象的安全和作业的顺利完成。
二、适用范围本指导书适用于成都翼高九天科技有限公司无人机飞行小组人员对线路巡视的正常飞行巡检工作。
三、无人机巡线试飞基本要求1.新建输电线路巡视重点:螺栓、线夹、金具、接续管、标牌、绝缘子的安装紧固情况。
2.巡线环境(1)、平原地区(2)、山下巡查山上线路(3)、同一走廊有平行杆塔和线路(4)、交叉跨越3.杆塔类型(1)、单回直线塔(2)、单回耐张塔(3)、同杆多回直线塔(4)、同杆多回耐张塔4.总体原则遵循由易至难的巡视顺序,避免不必要的损失5.辅助工作巡视轨迹记录、巡资料与电力设备对应关系记纪录、飞行过程影像资料拍摄四、引用标准《架空输电线路运行规程》 DL/T741-2010《架空输电线路直升机巡视技术导则》DL/T288-2012《电业安全工作规程》(电力线路部分) DL 409—2005《架空送电线路运行规程》DL/T 741—2010《架空输电线路管理规范》(试行)国家电网生[2003]481号《国家电网公司电力安全工作规程》(电力线路部分)国家电网安监 [2009]664号第二章任务准备一、接到任务后准备工作某小组接到任务后,该小组成员应当做如下准备工作:1.确定作业前往地点、时间。
无人机飞行手册
无人机飞行手册一、简介无人机飞行手册是为了帮助无人机操作者安全、合法地进行飞行而编写的指南。
本手册包含了无人机基本操作、安全要点、法律法规等内容,希望通过详细的说明和指导,使操作者能够更加准确、稳定地掌握无人机的飞行技巧,确保飞行的安全与顺利。
二、准备工作1. 确保使用合法:在飞行之前,确认自己所持有的无人机是否符合当地法律法规的要求,并依法进行注册和申请相关许可证件。
2. 检查设备完好性:仔细检查无人机的外观、螺旋桨、电池等部分是否存在损坏或者缺失,确保设备处于良好工作状态。
3. 飞行环境评估:选择合适的飞行区域,考虑空气质量、天气状况和可能存在的飞行障碍物,保证飞行环境安全。
三、基本操作1. 起飞前检查:在起飞之前,确保无人机和遥控器之间已经建立良好的信号连接,检查无人机是否稳定地放置在平坦的地面上。
2. 起飞、降落:使用遥控器控制无人机起飞和降落,确保起飞和降落的过程平稳无误。
3. 悬停和操控:通过遥控器控制无人机进行悬停和操控,保持无人机在飞行过程中的平稳性和稳定性。
4. 转向和高度控制:通过遥控器控制无人机的转向和飞行高度,确保无人机在飞行过程中能够按照指令进行准确的动作。
四、飞行技巧1. 飞行姿态:了解无人机的不同飞行姿态,包括平飞、升降、前进等,熟练掌握不同姿态下的操控技巧。
2. 紧急情况处理:在遇到紧急情况时,及时采取应对措施,如无人机失控、遥控器失灵等,保证飞行的安全性。
3. 飞行路径规划:在飞行之前,制定好飞行路径,确保飞行路径合理、安全,并遵守飞行管制区域的规定。
五、安全要点1. 保持可见性:在飞行过程中,操作者应始终保持对无人机的可见性,并避免飞行高度过高或者超出视线范围。
2. 飞行距离限制:根据相关法律法规,遵守无人机的最大飞行距离限制,确保飞行安全。
3. 飞行时间控制:合理安排无人机的飞行时间,不要超过无人机电池的工作时间,以免出现电力不足的情况。
4. 飞行人员规范:在飞行过程中,操作者需要保持冷静并专注于飞行任务,同时避免无关人员进入飞行区域,确保飞行安全。
无人机作业指导书V1.0课件
成都翼高九天科技有限公司无人机操作手册第一版第一章引言 (1)一、编制背景 (1)二、适用范围 (1)三、无人机巡线试飞基本要求 (1)四、引用标准 (2)第二章任务准备 (3)一、接到任务后准备工作 (3)二、设备领取 (3)三、工作确定 (4)第三章作业流程 (4)一、作业保障 (4)1.首要保证 (4)2.作业环境保障 (4)3.飞行安全保障 (5)4.作业危险点分析及避免方法 (6)二、正式作业 (7)1. 起飞前准备 (7)2.起飞作业 (8)3.不同塔型拍摄内容及方式: (10)3. 飞机回收 (14)三、数据处理 (15)1.无人机自身数据 (15)2.作业数据 (15)第四章附表 (15)一、作业设备清单 (16)二、无人机标准化作业卡 (16)三、无人机作业情况报告表 (16)四、无人机作业资料整理清单 (16)成都翼高九天科技有限公司无人机操作手册第一章引言一、编制背景本手册为规范无人机操作规程,保证无人机的正确保管和使用,以及操作人员的人生安全,作业对象的安全和作业的顺利完成。
二、适用范围本指导书适用于成都翼高九天科技有限公司无人机飞行小组人员对线路巡视的正常飞行巡检工作。
三、无人机巡线试飞基本要求1.新建输电线路巡视重点:螺栓、线夹、金具、接续管、标牌、绝缘子的安装紧固情况。
2.巡线环境(1)、平原地区(2)、山下巡查山上线路(3)、同一走廊有平行杆塔和线路(4)、交叉跨越第1页3.杆塔类型(1)、单回直线塔(2)、单回耐张塔(3)、同杆多回直线塔(4)、同杆多回耐张塔4.总体原则遵循由易至难的巡视顺序,避免不必要的损失5.辅助工作巡视轨迹记录、巡资料与电力设备对应关系记纪录、飞行过程影像资料拍摄四、引用标准《架空输电线路运行规程》DL/T741-2010《架空输电线路直升机巡视技术导则》DL/T288-2012《电业安全工作规程》(电力线路部分)DL 409—2005《架空送电线路运行规程》DL/T 741—2010《架空输电线路管理规范》(试行)国家电网生[2003]481号《国家电网公司电力安全工作规程》(电力线路部分)国家电网安监[2009]664号第2页第二章任务准备一、接到任务后准备工作某小组接到任务后,该小组成员应当做如下准备工作:1.确定作业前往地点、时间。
无人机作业指导书V1.0

成都翼高九天科技有限公司无人机操作手册第一版第一章引言 (1)一、编制背景 (1)二、适用范围 (1)三、无人机巡线试飞基本要求 (1)四、引用标准 (2)第二章任务准备 (3)一、接到任务后准备工作 (3)二、设备领取 (3)三、工作确定 (4)第三章作业流程 (4)一、作业保障 (4)1.首要保证 (4)2.作业环境保障 (4)3.飞行安全保障 (5)4.作业危险点分析及避免方法 (6)二、正式作业 (7)1. 起飞前准备 (7)2.起飞作业 (8)3.不同塔型拍摄内容及方式: (10)3. 飞机回收 (14)三、数据处理 (15)1.无人机自身数据 (15)2.作业数据 (15)第四章附表 (15)一、作业设备清单 (16)二、无人机标准化作业卡 (16)三、无人机作业情况报告表 (16)四、无人机作业资料整理清单 (16)成都翼高九天科技有限公司无人机操作手册第一章引言一、编制背景本手册为规范无人机操作规程,保证无人机的正确保管和使用,以及操作人员的人生安全,作业对象的安全和作业的顺利完成。
二、适用范围本指导书适用于成都翼高九天科技有限公司无人机飞行小组人员对线路巡视的正常飞行巡检工作。
三、无人机巡线试飞基本要求1.新建输电线路巡视重点:螺栓、线夹、金具、接续管、标牌、绝缘子的安装紧固情况。
2.巡线环境(1)、平原地区(2)、山下巡查山上线路(3)、同一走廊有平行杆塔和线路(4)、交叉跨越3.杆塔类型(1)、单回直线塔(2)、单回耐张塔(3)、同杆多回直线塔(4)、同杆多回耐张塔4.总体原则遵循由易至难的巡视顺序,避免不必要的损失5.辅助工作巡视轨迹记录、巡资料与电力设备对应关系记纪录、飞行过程影像资料拍摄四、引用标准《架空输电线路运行规程》 DL/T741-2010《架空输电线路直升机巡视技术导则》DL/T288-2012《电业安全工作规程》(电力线路部分) DL 409—2005《架空送电线路运行规程》DL/T 741—2010《架空输电线路管理规范》(试行)国家电网生[2003]481号《国家电网公司电力安全工作规程》(电力线路部分)国家电网安监 [2009]664号第二章任务准备一、接到任务后准备工作某小组接到任务后,该小组成员应当做如下准备工作:1.确定作业前往地点、时间。
无人机安全操作指引说明书
2 遥控器 1) 每次飞行前,请将遥控器电池电量充满。 2) 遥控器开机后闲置 9 分钟即发出报警,拨动摇杆可让遥控器恢复为正常工作状态。遥控器持 续闲置 10 分钟将自动关机。 3) 使用遥控器上的手机支架时,确保设备固定牢靠,务必压紧夹持装置避免移动设备滑落。 4) 确保遥控器天线展开并调整到合适的位置,以获得最佳的通信效果。 5) 遥控器天线如有损坏将影响使用性能,请及时返修。 6) 如更换遥控器,需要重新对频才能使用。具体对频步骤请参考用户手册。 7) 遥控器闲置时,每隔 3 个月左右重新充电一次以保持电池活性。
访问本公司网站获取最新说明和警告。本公司保留更新本免责声明的权利。最新的免责声明, 请以 官网上及您邮件接收的版本为准。
务必在使用产品之前仔细阅读本文档,了解您的合法权益、责任和安全说明;否则,可能带来 财产损失、安全事故和人身安全隐患。一旦使用本公司产品,即视为您理解、认可和接受本声明全 部条款和内容。使用者承诺对自己的行为及因此而产生的所有后果负责。使用者承诺仅出于正当目 的使用本产品,并且同意本条款及本公司可能制定的任何相关政策或者准则。
2) 请勿在强磁场区域或大块金属附近校准,如磁矿、停车场、带有地下钢筋的建筑区域等。
4
免责声明和安全操作指引
3)校准时请勿随身携带铁磁物质,如手机等。 4) 指南针校准成功后,将飞行器放回地面时,如果受到磁场干扰,APP 会显示处理方法,请按显
示的处置方法操作。 为避免可能的伤害和损失,飞行器在飞行过程中,一旦出现严重的漂移(如飞行器无法飞直线), 请务必马上降落。
重要提示
○ 使用本产品前请仔细阅读本操作指引,并严格按照说明操作。 ○ 请不要自行尝试拆解、改装、维修飞行器,如有需要请联系代理商。 ○ 本操作指引如有更新,恕不另行通知。
无人机操控与维护的使用教程详解
无人机操控与维护的使用教程详解无人机的应用越来越广泛,不仅仅用于航拍摄影,还广泛应用于农业、测绘、救援等领域。
然而,无人机的操控与维护对于初学者来说可能是一个挑战。
在本文中,我们将详细介绍无人机的操控与维护的使用教程,帮助读者更好地掌握这项技能。
一、无人机操控1. 准备工作在操控无人机之前,首先需要进行一些准备工作。
确保无人机的电池已经充满电,并且遥控器的电池也已经充满电。
此外,还需要找到一个开阔的空地进行飞行,避免无人机与障碍物碰撞。
2. 连接遥控器与无人机将遥控器与无人机进行连接是操控的第一步。
通常,无人机和遥控器之间有一个配对的过程,具体步骤可以参考无人机的使用手册。
一般来说,打开遥控器的电源,然后打开无人机的电源,两者之间会自动进行配对。
3. 学习基本操作掌握无人机的基本操作是操控的关键。
遥控器上通常有四个摇杆,左边的摇杆控制无人机的升降和旋转,右边的摇杆控制无人机的前进、后退、左右移动。
通过练习,逐渐熟悉摇杆的操作,掌握平稳起飞、降落和悬停等基本动作。
4. 学习飞行模式大多数无人机都有不同的飞行模式,包括手动模式、自动悬停模式和自动返航模式等。
在手动模式下,飞行器完全由操控者控制;在自动悬停模式下,无人机可以自动悬停在空中;在自动返航模式下,无人机会自动返回起飞点。
学习飞行模式,可以根据实际需求选择合适的模式。
二、无人机维护1. 清洁与保养无人机在飞行过程中容易受到灰尘、沙粒等杂物的影响,因此定期清洁非常重要。
使用柔软的刷子和清洁剂轻轻擦拭无人机表面,确保无人机干净整洁。
此外,还需要定期检查螺旋桨是否损坏,如果发现有损坏,及时更换。
2. 航拍设备的保护如果无人机用于航拍摄影,保护航拍设备也是很重要的。
在飞行之前,确保相机和云台的稳定性,避免受到外界的震动影响。
同时,在飞行过程中,注意避开树枝、电线等障碍物,避免对航拍设备造成损坏。
3. 能源管理无人机的电池是其能源来源,因此合理管理电池非常重要。
md4系列四旋翼无人机系统快速操作手册
md4系列四旋翼无人机系统快速操作手册佛山市安尔康姆航拍科技有限公司2011年6月一、起飞前的准备1、飞行器动力电池:用电池电量显示仪对电池进行测试,对于md4-200显示参数须高于16.5V,对于md4-1000,显示参数须高于25V。
2、遥控器:每次飞行时一定要把遥控器电池充满电,保证不会因为电量的原因导致遥控器无法控制飞行器;遥控器的频率必须飞行器接收机的频率一致,否则,飞行器无法手动起飞;3、地面站电脑:携带足够的设备电池,保证地面站电脑的电池能满足该次作业的要求,不要出现在飞行过程中地面站电脑电量不足而关机的情况;4、地面站供电:地面站承担着解码飞行器下传数据的重要任务,一旦断电,则无法显示任何数据,这样会对安全飞行带来隐患;5、任务载荷:如果是携带相机或摄像机,需保证该设备的电量及存储卡的容量。
6、飞行环境:md4-200要求风速小于6米/秒,md4-1000要求风速小于12米/秒,周围环境空旷(起飞点离障碍物的距离应保持在20米以上),对GPS 信号和磁力计不存在干扰(详情下文有说明)。
二、飞行相关1、将飞行器放置在平坦的地面,保证机体平稳,起飞地点尽量避免有沙石、纸屑等杂物;2、打开遥控器电源,为飞行器插入充满电的电池,自检通过后,飞行器会每隔两秒发出一声“滴”的响声,表示正处于搜索GPS信号状态;3、打开地面站软件mdCockpit,弹出下行数据回放页面,重点观察GPS信号跟设备状态。
GPS信号的确认:观察地面站软件的下行链路解码器界面,保证GPS的定位精度不高于4米,如右图红框部分所示。
设备状态的确认:该步骤主要检查磁力计、GPS及SD卡的工作状态,正常模式如下图:4、遥控器摇杆动作的分配:图15:摇杆动作的分配A、把遥控器的F键往上推到头,启动旋翼,360度转动或前后左右推拉右侧摇杆,观察各旋翼的工作状态并使飞行器尽快定位起飞位置。
注意:在飞行过程中,切不可将F键拉回原位!!!B、通过左侧摇杆的油门通道(上下方向)慢慢的加大电机的转速,待旋翼储存足够的升力后,飞行器慢慢离地。
Cessna 400 无人机操作手册说明书

Radio Control Model AirplaneCESSNA 400CESSNA400Operation manual1.Please read this manual carefully and follow the instruction of the manual before you use this products;2.Our airplane is not a toy,which is only suitable for the experienced manipulator or under the guidance of the experienced pilot.3. Not recommended for the children under 14 years old.4.Please adjust this plane according to the instruction and make sure that the finger and other parts of your body out of the rotating parts of the plane, or it may cause damage to the plane or injury to your body.5.Do not fly in the thunderstorm,strong wind or bad weather.6.Never fly the plane where there are power lines overhead, automobiles,nearaerodorme,railway or highway.7.Never fly our plane where are crowds of people.Give yourslef plenty of roomflying,as the plane can fly at a high speed.Remember that you are responsible forothers safety.8.Do not attempt to catch the plane when you are flying it.9.The user should bear full responsibility of proper operation and usage with regards to this model.We, Top RC together with any distributor of us will not be responsible for any liability or loss due to improper operation.CONTENTSStatment:Brief introduction Main specifications Main configuration Products constitution Assemble processes Adjustment s Saf tey precautions Charging method and cautions Caution and Notice for Li-po battery Caution and notice for ESC Spare par ts ....................................................................................1........................................................................................1...................................................................................1.......................................................................................1...................................................................................2teps.........................................................................................4..................................................................................5...............................................................................6 .....................................................6 ...............................................................................7.. (8)fuselage,main wings, horizontal wings, vertical wings, front landing gear, main landing gear,propellor,stay bar,Cowling set, battery, , radio,charger,antenna, accessary bag★Wingspan 980mm★Length 800mm★Weight 680g★Thrust ≥680g★Flying time ≥6 min Kits without radioKits without radio,charger and batteryWithout any electronic parts★Radio system 4ch 2.4Gzh E-401 radio★Motor DST-1200★Battery 1300★ESC 20A★Servo 9gX4mAh 11.1V 15C Thank you for purchasing the “” remote control model airplanes from Top RC, and we hope this plane will bring endless joy to you after you choose it.With the EPO foam materials, it is very light and strong;Used the perfect structure design, easy to assemble and maintain,and crash resistance.Used the perfect power system, it has the strong power and can fly long time;It can finish the inverted flight,inside loops, outside loops, axial rolls ,and other aerobatic performance.High scale, and beautiful appearance.CESSNA ★★★★★1.Install the main landing gearTake of the fuselage& main landing gear&stopper& foam glue from the box.Assemble the main landing gear intothe slot of the fuselage,and add the glue to the wooden stopper, then insert it into the slot.At last, lock the main landing gear.2. Install the tail wingsTake of the horizontal wings & vertical wings& foam glue from the box. Add the foam glue to the horizontal wings and fuselage,then insert the horizontal wings to the slot of the tail parts and connect to the e the same method to connect the vertical wing to the fuselage.3. Install the main wingsTake of the main wings &stay bar&antenna&screws from the box.Connect the navigation light and aileron wire (Make sure the positive and negative cannot be connected reversed.).Insert the main wings into the slot of the fuselage, and use the PM5*35MM screw to lock it,then lock the stay bar by the PA1.7X10mm screws.At last, please use the foam glue to connect the antenna to the slot of the main wings.5.Finished the assembly of the Cessna.4. Install the propellorTake of the cowling& propellor&nut&spanner from the box, please lock the propellor by the following pictures.4.Please check the control surface and front wheel can work or not.Do not make it reverse, and make sure that the control surface &free wheel and the joystick are in the same direction.1.Turn on the transmitter , and please make sure that there is enough power for the transmitter.Push the joystick for throttle and throttle trim switch to the lowest position,and other trim switch should be in the neutral position.2.Please make sure that the battery is full power ,and connect to the ESC plug , then install the battery into the battery case.3.Please catch the back part of the fuselage and push the throttle slowly to make sure that the motor can work normally.45-48mm 1.If you have the simulator, we suggest that you can practise your skill by the simulator before you fly this model,which will bring some help for you.2.Please climb the plane above the 50 meters with half throttle to fly it when you fly it for your first time, then you will be familiar with the performance of this plane.3.You should learn how to control this model blandly, it will reduce the possibility of crash and prolong the usage life of the plane.4.The turn radius should not be too little,or it will stall and it will increase the possibility of crash.5.When taking off or landing the plane, you should against the wind.6.Do not fly the model over your head or behind you, you should fly the model in front of you.5.Check the center of gravity and make sure that the CG of the plane should be within the range as indicatedby the arrows.6.Finished the adjustment for .CESSNAThen plug cigarette into its socket in car (Adapter should beconnected if charge at home: connect the adapter to home powersocket, then plug the adapter' DC end to charger). The LED will turngreen indicating it is ready for charging.2.Connect the battery to charger per its interface mark. The LED becomesred, which means charging is on the way.3.When LED flashing, the charger will enter the stage of drip currentcharging. The LED turns green when fully charged , and the batterywill be used at any time.1. 1. While charging is in process, please do not make it near flammable materials .2.Expect Li poly battery, this charger is not allowed for other kinds of battery.3. While charging, please keep it out of the reach of Children .4. When this charger is in use, please do not go away and leave it unwatched , if any abnormality occurs(such as the power indicator is off , the temperature of the battery rise rapidly , etc .) stop charging immediately .5. Please do not use power with output voltage higher than 15V .6. Please do not disassemble the charger or its accessories.7. When the battery is not cool down, please do not urge to charge it.1.Be fully charged under no more than 1 A voltage by using the specified charger.2.Be discharged under 10C voltage but avoiding discharge time too long to harm the battery.3.Repeat the first and second step one or two times.4.When the Li-poly battery was stored more than 3 months, it needs to be recharged to maintain its voltage,and ensure its life time.Specifications:Input voltage: DC 10V~15VOutput voltage:2S-3S Li-Po batteryCharging current: 1.0AIndicator state:Green: Charge complete & no batteryRed: ChargingThe batteries are inspected separately. When the voltage reaches 4.20V, the charging process stops.1. Do not disassemble or reconstruct the battery.2. Do not short-circuit the battery.3. Do not use or leave the battery nearby the fire, stove or heated place (more than 80℃).4. Do not immerse the battery in water or sea water, do not get it wet.5.Do not charge the battery under the blazing sunlight.6.Do not drive a nail into the battery, strike it by hammer or tread it.7.Do not impact or toss the battery.8.Do not use the battery with conspicuous damage or deformation.9.Do not charge a warm battery. Allow it to cool completely before attempting to charge.10. Do not reverse charge or over discharge the battery.11. Do not connect the battery to the ordinary charger socket or car cigarette jack.12. Do not use the battery for unspecified equipment.13. Do not touch the leaking battery directly, please wash your skin or clothes withwater if they are bedewed by liquid leaking from the battery.14. Do not mix the Li-Poly battery with other un-chargeable battery in using.15. Do not continue charging the battery over the prescribed time.16. Do not put the battery into the microwave oven or high-pressure container.17. Do not use the abnormal battery.18. Do not use or keep the battery under the sunlight.19. Do not use the battery nearby the place where generates static electricity (over 64V).20. Do not charge the battery when the environmental temperature is under 0℃ or over 45℃.21. If you find the battery leaking, smelling or abnormal, stop using it and return it to the seller.22. When the battery is charging, please do not make it near the flammable materials!23. Keep the battery away from the children.24. Use the specified charger and observe charging requirement (under 1A).25. When using by minors, parents should show them to the correct instruction.1. The function of this ESC was in the best condition after factory setting; please do not change it by yourself.2. Before connecting the battery, please make sure the throttle and trim were in the lowest position. If the throttle and trim were not in the lowest position by mistake after connecting the battery, you can cut off the battery; move the throttle and push to the lowest position, then connect the battery.3. The ESC of the airplane was in a good cooling position after factory assembly; please do not move its position.4. The ESC should be connected to the brushless motor correctly, otherwise the motor will be reversed turning, and the model airplane can not fly correctly.No:top00401Fuselage (blue)No:top00402Main wings (blue )No:top00403Canopy )(blue )No: op404tDST-1200 brushless motor No:top00404Tail wings (blue )No:top00406spinnerNo:top00405Landing gear No:top00407Propellor No:top00408screws set No:top00409foam glueNo:top20220A Brushless ESC No:top50511.1V,1300mah lipo battery No:top00411connector wire No:top00410LED lightsNo:top00412Fuselage (red )No:top00413Main wings (red )No:top00414Canopy (red )No:top00415Tail wings (red )Radio Control Model Airplane CESSNA 400CESSNA 400Made in china www. Tel: 0086-(0)755-27559991 Fax: 0086-(0)755-27559990Shenzhen Top RC Hobby Co .,Ltd。
无人机解决方案操作手册

无人机数据处理完整解决方案操作手册目录1产品特点 (3)1.1无人驾驶小飞机项目情况简介 (4)1.2数据处理软件技术指标 (4)1.3硬件设备要求 (4)1.4处理软件要求 (4)1.5数据要求 (5)2数据处理操作流程 (6)2.1数据处理流程图 (6)2.2空三加密 (7)2.2.1启用软件FlightMatrix (7)2.2.1.1创建Flightmatrix工程 (7)2.2.1.2设置工程选项参数 (8)2.2.1.3自动化处理 (13)2.2.1.4DA TMatrix交互编辑 (16)2.2.1.5调用PA TB进行平差解算 (22)2.3生成DEM、DOM (22)2.4镶嵌成图 (26)2.4.1启用软件EPT (26)2.4.1.1导入MapMatrix工程生成DOM镶嵌工程 (29)2.4.1.2编辑镶嵌线 (36)2.5图幅修补 (37)2.6创建DLG,进行数字测图 (38)1产品特点1)空三加密1.可根据已有航飞POS信息自动建立航线、划分航带,也可手动划分航带。
2.完全摒弃传统航测提点和转点流程,可不依赖POS信息实现全自动快速提点和转点,匹配同影像旋偏角无关,克服了小数码影像排列不规则、俯仰角、旋偏角等特别大的缺点。
即使是超过80%区域为水面覆盖,程序依旧能匹配出高重叠度的同名像点,整个测区连接强度高。
3.直接支持数码相机输出的JPG格式或TIF格式,无需格式转换。
4.无需影像预旋转,横排、纵排都可实现自动转点,节约数据准备时间。
5.实现畸变改正参数化,方便用户修正畸变改正参数,不需要事先对影像做去畸变即可完成后续4D产品生产。
6.除无人机小数码影像外,还适用于其它航空影像。
7.空三加密支持无外业像控点模式,方便快速制作挂图,满足相关需求。
8.专门针对中国测绘科学研究院二维检校场和武汉大学遥感学院近景实验室三维检校场检校报告格式研发了傻瓜式批处理影像畸变差改正工具,格式对应,检校参数直接填入,无需转换,方便空三成果导入到其他航测软件进行后续处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无人机数据处理完整解决方案操作手册目录1产品特点 (3)1.1无人驾驶小飞机项目情况简介 (4)1.2数据处理软件技术指标 (4)1.3硬件设备要求 (4)1.4处理软件要求 (4)1.5数据要求 (5)2数据处理操作流程 (6)2.1数据处理流程图 (6)2.2空三加密 (7)2.2.1启用软件FlightMatrix (7)2.2.1.1创建Flightmatrix工程 (7)2.2.1.2设置工程选项参数 (8)2.2.1.3自动化处理 (13)2.2.1.4DA TMatrix交互编辑 (16)2.2.1.5调用PA TB进行平差解算 (22)2.3生成DEM、DOM (22)2.4镶嵌成图 (26)2.4.1启用软件EPT (26)2.4.1.1导入MapMatrix工程生成DOM镶嵌工程 (29)2.4.1.2编辑镶嵌线 (36)2.5图幅修补 (37)2.6创建DLG,进行数字测图 (38)1产品特点1)空三加密1.可根据已有航飞POS信息自动建立航线、划分航带,也可手动划分航带。
2.完全摒弃传统航测提点和转点流程,可不依赖POS信息实现全自动快速提点和转点,匹配同影像旋偏角无关,克服了小数码影像排列不规则、俯仰角、旋偏角等特别大的缺点。
即使是超过80%区域为水面覆盖,程序依旧能匹配出高重叠度的同名像点,整个测区连接强度高。
3.直接支持数码相机输出的JPG格式或TIF格式,无需格式转换。
4.无需影像预旋转,横排、纵排都可实现自动转点,节约数据准备时间。
5.实现畸变改正参数化,方便用户修正畸变改正参数,不需要事先对影像做去畸变即可完成后续4D产品生产。
6.除无人机小数码影像外,还适用于其它航空影像。
7.空三加密支持无外业像控点模式,方便快速制作挂图,满足相关需求。
8.专门针对中国测绘科学研究院二维检校场和武汉大学遥感学院近景实验室三维检校场检校报告格式研发了傻瓜式批处理影像畸变差改正工具,格式对应,检校参数直接填入,无需转换,方便空三成果导入到其他航测软件进行后续处理。
2)DEM、DOM生产1.摒弃传统的基于单模型像方匹配的方式匹配生成DEM模式,采用基于物方匹配的方式生产DEM,既能充分利用小数码高重叠度的这一优势,大大提高匹配精度,并且能自动过滤人工建筑物,减少后期人工编辑工作量,同时提供人工干预恢复功能。
2.采用并行化处理方式快速生成全区DEM、DOM,在不升级现有硬件情况下,采用集群计算模式,可用局域网内任意一台电脑作为服务器,自动调用网内冗余计算能力参与计算,计算任务的分配和计算结果的回收实现全自动化,无需人工干预。
3.提供多种方式高效编辑DEM,编辑功能涵盖国内外主流摄影测量软件的DEM编辑功能。
4.全自动批处理匀光匀色,针对单张影像内部色彩不均和影像之间色彩不均,分别提供小波滤波法单调匀光和wallis整体匀光,还可以对带有地理坐标信息的影像如tif+tfw提供基于地理编码匀光,可解决后期拼接影像时拼接线两边色彩、亮度不一致的问题。
针对影像色调灰暗单调死板,在匀光匀色过程中可根据情况适当增加绿色信息。
5.全自动拼接正射影像,自动选线,自动裁图,拼接裁图一体化,指定正射影像图幅存放路径,程序批处理一次出所需的图幅。
一次处理影像数量无限制,一次生成图幅数量无限制。
6.提供功能丰富的影像编辑功能(功能参照PS),无需后续PS干预,所见即所得,完全满足精编正射影像需求。
3)DLG生产1.可不需要事先采集核线,采用实时核线测图,节省采核线的时间。
2.根据外方位元素和影像重叠度,自动组合立体像对,采用最佳交会角,达到最好的测图效果,以提高测图高程精度。
3.自动/手动切换立体模型,实现无缝测图,降低接边工作量和立体模型选择工作量,提高作业效率。
1.1无人驾驶小飞机项目情况简介低空无人飞行器的测绘遥感系统主要由航拍无人机系统、任务载荷系统、数据处理系统等组成。
在气候条件较差、测区面积较小的情况下,采用低空无人飞行器进行航拍、快速获取测区大比例尺4D产品已经成为一种高效、低成本的遥感测绘方式。
为了研发以无人飞行器为平台的低空无人测绘遥感系统,用于土地与资源开发利用的实时监测,为国土资源调查与管理工作提供及时、准确、直观的数据和资料,更好地服务于国民经济建设。
武汉航天远景科技有限公司与湖南测绘科技研究所、湖南山河科技有限公司合作,为“低空无人飞行器的测绘遥感系统”提供了全面的解决方案。
其中,航拍无人机系统由湖南山河科技股份有限公司研发承建;任务载荷系统由湖南省测绘研究所承建;数据处理系统由武汉航天远景科技有限公司研发。
1.2数据处理软件技术指标➢能实现全自动相对定向,全自动空三转点,自动化程度高,处理速度快,能快速得到整个测区的DEM、DOM和DOM镶嵌,能实现数字线划图(DLG)采集。
➢成图比例尺:1:1000,1:2000的数字高程模型(DEM)、数字正射影像图(DOM)、数字线划图(DLG)。
1.3硬件设备要求推荐配置:联想M7150标配 CPU:E8400(CORE 2 DUO3.0G 6M)主板:G41硬盘:500G内存:2G DDR3 1333集成显卡 DOS特配电源:310W 7200/SATA2/DVDROM/SATA1.4处理软件要求整套无人机处理需要用到航天远景的四套软件,分别是MapMatrix4.0、FlightMatrix、DA TMatrixV1.0和EPTV1.1。
1.5数据要求❖原始影像(必须)❖POS参数文件(必须)2数据处理操作流程2.1数据处理流程图操作流程图2.2空三加密2.2.1启用软件FlightMatrix2.2.1.1 创建Flightmatrix工程1.当工程文件不存在时,FlightMatrix创建该工程文件。
当工程文件存在时,FlightMatrix加载该工程文件。
打开FilghtMatrix建立(加载)工程,如下图2-1所示:图2-1(FilghtMatrix主界面)2.点击建立(或加载)工程文件(图2-2),并选择存放路径;图2-22.2.1.2 设置工程选项参数点击图2-2打开后,弹出工程选项对话框(图2-3)。
在工程选项对话框中需要设置工程的基本参数、POS参数、航带参数、空三转点、空三解算等。
a.基本参数设置图2-3➢POS参数文件:指定POS参数文件,其具体格式在POS参数页面进行设置。
➢正射纠正方式:指定生成正射影像的纠正方式。
有通过空三转点、解算方式纠正和使用POS参数直接纠正两种。
➢MapMatrix工程文件:新建(加载)MapMatrix工程文件并确认存放路径。
在FlightMatrix进行数据处理的各步骤中,会创建相应的MapMatrix工程,当出现问题而无法自动处理时,可以在MapMatrix中加载该工程文件对数据进行检查。
➢DEM成果数据名称:设置DEM成果数据名称,最后生成的DEM文件在MapMatrix 工程文件所在的目录下的DEM子目录中,名为DEM成果数据名称.dem。
➢正射影像成果数据名称:设置正射影像成果数据名称,最后生成的正射影像文件在MapMatrix工程文件所在的目录下的DOM子目录中,名为正射影像成果数据称.tif,并同时生成同名的kml文件,可在Google Earth中调入该kml文件,叠加显示正射影像成果。
➢日志文件名称:设置日志文件名,在处理日志窗口显示的消息都会保存在该日志文件中。
➢在日志文件尾部追加:如果选中该选项,当日志文件存在时,在日志文件尾部追加新的消息,当日志文件不存在时,创建该日志文件。
当没有选中该选项时,总是创建新的日志文件,如果原日志文件存在,则会被覆盖。
➢记录时间:在显示日志消息时,是否冠以时间信息。
➢记录日期:在显示日志消息时,是否冠以日期信息。
仅当记录时间信息时,才可记录日期信息。
➢DEM格网大小:设置DEM成果数据中DEM格网的尺寸。
➢正射影像像素大小:设置正射影像成果数据中像素的尺寸。
➢参考水准面高程:当使用POS参数直接正射纠正时,指定正射纠正目标水准面的高程。
b.POS参数设置图2-4➢相对航高:设置飞行时,相机距离地面的高度。
➢相机焦距:默认的相机焦距,以毫米为单位。
➢从影像文件中获取相机焦距:如果选中该选项,程序试图从影像文件中获取相机焦距信息,如果获取失败,则使用默认的相机焦距;如果没有选中该选项,则直接使用默认的相机焦距。
➢像素大小:默认的照片像素大小,以毫米为单位。
➢从影像文件中获取像素大小:如果选中该选项,程序试图从影像文件中获取像素大小信息,如果获取失败,则使用默认的像素大小;如果没有选中该选项,则直接使用默认的像素大小。
➢坐标类型:选择POS参数文件中的坐标是大地坐标还是UTM投影坐标。
➢UTM带号:如果POS参数文件中的坐标是UTM投影坐标,设置UTM带号。
➢北半球:如果POS参数文件中的坐标是UTM投影坐标,设置是否是北半球坐标。
➢偏航角起始方位:设置偏航角的起始方位。
➢偏航角旋转方向:设置偏航角的旋转方向。
➢数据列分隔符:设置POS参数文件的字段分隔符。
常见的分隔符有空格、逗号和制表符等。
可以用”\t”表示制表符。
➢影像文件路径前缀:设置影像文件路径前缀。
影像文件路径前缀与影像文件名、影像文件路径后缀一起组合成完整的影像文件路径。
➢影像文件路径后缀:设置影像文件路径后缀。
➢影像文件名长度:设置影像文件名的长度。
如果影像文件名不足该长度,则会在影像文件名前部补前缀字符。
如果影像文件名无需补前缀字符,可将影像文件长度设为-1。
➢前缀字符:设置当影像文件名长度不足时,在影像文件名前部填充的前缀字符。
➢角度单位:设置POS参数文件中使用的角度单位,可选角度、弧度和梯度等。
➢数据列:设置每个字段在POS参数文件中的列号。
如果影像文件名是通过POS点ID经组合得到的,可以把影像文件名字段与ID字段设置为相同的数据列。
c.航带参数设置图2-5➢POS参数阈值1)最大俯仰角:设置照相时飞行姿态的最大俯仰角阈值。
俯仰角超过该阈值的照片将会被忽略。
2)最大侧滚角:设置照相时飞行姿态的最大侧滚角阈值。
侧滚角超过该阈值的照片将会被忽略。
➢自动创建航带:1)最大航片旋偏角:最大航片旋偏角阈值。
当相邻照片的旋偏角超过该阈值时,则认为它们分属不同的航带。
2)航带最大曲率:设置航带最大曲率阈值。
自动创建的航带保证其曲率不超过该阈值。
3)相邻航片的最小重叠度:设置相邻航片的最小重叠度阈值。
当相邻的照片的重叠度小于该阈值时,则认为这两张照片分属不同的航带。
4)航带最少像片数:设置每天航带的最少像片数。
少于该照片数的航带将会被忽略。
d.空三转点设置图2-6➢提取设置1)初始金字塔宽度设置:指的是将原始影像按照一定的比例采样后影像的宽度大小。