基于大林算法的炉温控制系统设计与仿真课程设计报告
基于大林算法的温度控制系统设计说明

计算机控制技术课程设计2015/2016学年第二学期设计课题:基于大林算法的电路温度控制系统的设计专业:__ __班级: __ _学号:___ _______姓名:_______ _ _____2016年5月目录第一章课题简介 (1)1.1课题的目的 (1)1.1.1 本机实现的功能 (1)1.1.2 扩展功能: (1)1.2课题的任务及要求 (1)第二章系统方案设计 (2)2.1 水温控制系统的总体介绍 (2)2.2 系统框图 (2)2.3 闭环系统的工作原理 (2)第三章系统硬件设计 (3)3.1 系统原理图 (3)3.2 单片机最小系统设计 (3)第四章大林控制算法设计 (5)4.1 大林控制算法原理: (5)4.2 控制器的设计及公式推导过程 (6)4.3 采样周期的选择: (7)第五章水温控制系统的仿真 (7)5.1振铃现象 (7)5.2 Matlab仿真 (9)5.2 大林算法控制系统编程设计: (10)5.3各模块子程序设计 (11)5.3.1主程序设计 (11)5.3.2读出温度子程序 (12)5.5.3数码管显示模块 (13)5.5.4温度处理程序 (14)第六章小结与体会 (15)第七章参考文献 (16)第八章附录 (17)第一章课题简介1.1课题的目的1.1.1 本机实现的功能(1)利用温度传感器采集到当前的温度,通过AT89S52单片机进行控制,最后通过LED数码管以串行口传送数据实现温度显示。
(2)可以通过按键任意设定一个恒定的温度。
(3)将水环境数据与所设置的数据进行比较,当水温低于设定值时,开启加热设备,进行加热;当水温高于设定温度时,停止加热,从而实现对水温的自动控制。
(4)当系统出现故障,超出控制温度围时,自动蜂鸣报警。
1.1.2 扩展功能:(1)具有通信能力,可接收其他数据设备发来的命令,或将结果传送到其他数据设备。
(2)采用适当的控制方法实现当设定温度或环境温度突变时,减小系统的调节时间和超调量。
电阻炉的温度控制系统设计(课程设计)
电阻炉的温度控制系统设计摘要电阻炉在冶金工业中的运用相当广泛,其温度参数在生产过程中的自动控制系统也随着微机单片机可控硅技术在工业控制领域的推广、应用,正朝着高精度、高稳定性、高智能化的方向发展。
电阻加热炉是典型的工业过程控制对象。
其温度控制具有升温单向性、大惯性、大滞后、时变性等特点,且其升温、保温是依靠电阻丝加热,降温则是依靠环境自然冷却。
温度是工业对象中主要的被控参数之一。
尤其是在冶金、化工、机械各类工业中,广泛使用各种加热炉、热处理炉、反应炉等。
由于炉子的种类不同,所采用的加热方法及燃料也不相同,如煤气、天然气等。
但就控制系统本身的动态特性而言,均属于一阶纯滞后环节,在控制算法上基本相同,可采用PID控制或其他纯滞后补偿算法。
但对于电阻加热炉来说,当其温度一旦超调就无法用控制手段使其降温,因而很难用数学方法建立精确模型和确定参数。
而传统PID控制是一种建立在经典控制理论基础上的控制策略,其设计依赖于被控对象的数学模型,因此对于加热炉这类控制对象采用传统PID 的控制方案很难达到理想的控制效果。
为了保证生产过程正常安全地进行,提高产品的质量和数量,以及减轻工人的劳动强度,节约能源,对加热用的各种电炉要求在一定条件下保持恒温,不能随电源电压波动或炉内物体而变化,或者有的电炉的炉温根据工艺要求按照某个指定的升温或保温规律而变化,等等。
因此,在工农业生产或科学实验中常常对温度不仅要不断地测量,而且要进行控制。
在电阻炉温度控制系统的设计中,应尽量考虑到如何有效地避免各种干扰因素而采用一个较好的控制方案,选择合适芯片及控制算法是非常有必要的本设计要用单片机设计一个电阻炉温度控制系统。
关键词:恒温;热处理;控温系统Design for Temperature Control System of Resistance FurnaceAbstractThe resistance furnace in metallurgical industry is widely application, its temperature parameters in the production process of automatic control system with single-chip microcomputer control technology in the field of industrial silicon, the popularization and application in high precision, high stability, high intelligent direction. Resistance furnace is typical of industrial process control object. The temperature control with temperature mono-direction and large inertia, the lag and time-varying characteristics, such as temperature, heat preservation and heat resistance wire depend on environment, cooling is natural cooling.Temperature is the main objects of accused of parameters. Especially in metallurgy, chemical, machinery, widely used in various industries of heating furnace, heat treatment furnace, reactors. Because of the different kinds of heating method is adopted, and the fuel is not identical also, such as coal gas, natural gas etc. But control system dynamic characteristics of itself, all belong to a first-order lagging pure, in the same basic control algorithm, PID control or other pure lag compensation algorithm. But for resistance furnace, when the temperature once overshoot cannot use control means that the cooling, so it is difficult to use mathematical method to establish precise model and parameters. While the traditional PID control is an established in classical control theory, the control strategy based on its design depend on mathematical model of the controlled objects, so this kind of control for furnace adopts the traditional PID control object to achieve the ideal control scheme.In order to guarantee the normal production process, improve product safely quantity and quality and to reduce the labor intensity, energy saving, with all kinds of electric heating requirements under certain conditions, not with remains constant voltage fluctuations or furnace changes, or some objects according to the technical requirement of electric furnace temperature or a designated in accordance with the law and heat changes, etc.Therefore, in industrial and agricultural production and scientific experiments to constantly measuring temperature will not only, and to control System.In the resistance furnace temperature control system design, should try to consider how to effectively avoid distractions and USES a better control scheme, select the appropriate chip and control algorithm is necessary to the design with a single-chip microcomputer temperature control system of resistance furnace.Keywords: temperature;Heat treatment;Temperature control system目录摘要 (1)Abstract (2)一、总体方案设计 (4)1、设计内容及要求 (4)2、工艺要求 (4)3、要求实现的系统基本功能 (5)4、对象分析 (5)5、系统功能设计 (5)二、硬件的设计和实现 (5)1、计算机机型 (5)2、设计支持计算机工作的外围电路 (5)3、设计输入输出通道 (8)4、元器件的选择 (10)三、数字控制器的设计 (7)1、控制算法 (10)2、计算过程 (11)四、软件设计 (12)1、系统程序流程图 (12)2、程序清单 (15)五、完整的系统电路图 (27)六、系统调试 (27)七、设计总结 (27)八、参考文献 (27)附录 (28)一、总体方案设计设计任务:用一台计算机及相应的部件组成电阻炉炉温的自动控制系统,并使系统达到工艺要求的性能指标。
基于大林算法电加热炉温度控制系统设计

基于大林算法电加热炉温度控制系统设计电加热炉温度控制系统设计是现代工业生产中非常重要的一环,它关乎着工作环境的安全和产品质量的稳定性。
在这一设计过程中,大林算法被广泛应用于温度控制系统中,以实现精确、稳定和可靠的温度控制。
本文将介绍电加热炉温度控制系统设计的基本原理和过程,并重点阐述大林算法在该系统中的应用。
首先,要了解电加热炉温度控制系统的基本原理。
该系统主要由温度传感器、控制器和执行器组成。
温度传感器负责将电加热炉内的温度信号转化为电信号,控制器则接收并处理这些电信号,并通过执行器调节电加热炉的功率,以维持设定的温度。
在传统的温度控制系统设计中,一般采用PID(比例、积分、微分)控制算法。
然而,PID算法并不能完全满足电加热炉温度控制的要求。
因此,大林算法成为了一个更好的选择。
大林算法是一种自适应控制算法,它能够根据炉内温度的变化自动调整控制参数,以提供更加精确和稳定的控制效果。
接着,我们来具体介绍大林算法在电加热炉温度控制系统设计中的应用。
首先,大林算法通过建立一个数学模型来描述电加热炉的温度特性。
这个模型包括了电加热炉的热容、传热系数、功率等参数。
基于这个模型,大林算法可以根据炉内温度的变化预测未来的温度变化,并相应地调整控制参数。
在实际应用中,大林算法将炉内温度信号作为输入,经过计算得到一个误差信号。
根据这个误差信号,大林算法会自动调整比例、积分、微分参数,并通过控制器向执行器发出相应的命令,以调节电加热炉的功率。
通过这种自适应的控制方式,大林算法能够快速响应温度变化,并在不断迭代过程中逐步调整控制参数,以达到最佳的温度控制效果。
同时,大林算法还具有自学习的功能。
在系统运行的过程中,大林算法会根据反馈信号和期望信号之间的差异不断优化控制参数,以提高控制效果。
这种自学习的特性使得大林算法在应对复杂的工艺和环境变化时也能够取得良好的控制效果。
综上所述,大林算法在电加热炉温度控制系统设计中具有重要意义。
计算机控制技术

计算机控制技术课程设计目录绪论------------------------------------------------------------------3 控制系统建模------------------------------------------------------3 系统结构------------------------------------------------------------4 最小拍算法---------------------------------------------------------5 大林算法------------------------------------------------------------8 算法比较------------------------------------------------------------12 总结------------------------------------------------------------------13 参考文献------------------------------------------------------------13基于最小拍算法和大林算法的电阻温度炉的炉温控制系统设计比较选择绪论计算机控制技术是一门以电子技术、自动控制技术、计算机应用技术为基础,以计算机控制技术为核心,综合可编程控制技术、单片机技术、计算机网络技术,从而实现生产技术的精密化、生产设备的信息化、生产过程的自动化及机电控制系统的最佳化的专门学科。
本设计电阻炉是现代工业中应用最多的加热设备,广泛应用于化验室样品熔样,冶金冶炼,热处理中工件的分段加热和冷却等。
针对具有大纯滞后环节的电阻炉温度控制系统,设计了单片机控制电路,采用了最小拍算法和大林算法,组建了系统的组态,进行了系统仿真分析,控制效果良好,根据工程实际需要进行适当选择。
基于大林算法的电阻炉温度控制系统设计(DOC)
课程设计任务书学院专业学生姓名班级学号课程设计题目基于大林算法的电阻炉温度控制系统设计实践教学要求与任务:1)构成电阻炉温度控制系统2)大林算法设计3)硬软件设计4)实验研究5)THFCS-1现场总线控制系统实验6)撰写实验报告工作计划与进度安排:1)第1~2天,查阅文献,构成闭环温度控制系统2)第3天,大林算法设计3)第4~5天,硬软件设计4)第6天,实验研究5)第7~9天,THFCS-1现场总线控制系统实验6)第10天,撰写实验报告指导教师:201 年月日专业负责人:201 年月日学院教学副院长:201 年月日目录摘要 (1)1.课题简介 (2)1.1课题目的 (2)1.2课题内容 (2)1.3课题要求 (2)2.大林算法控制系统方案设计 (3)2.1控制系统总体介绍 (3)2.2控制系统闭环工作原理 (3)3.大林算法控制系统硬件电路设计 (4)3.1 A/D采样电路 (4)3.2 D/A输出电路 (5)3.3给定对象硬件电路设计 (6)3.4总硬件图 (7)4.大林算法控制系统算法设计 (8)4.1 控制算法的原理 (8)4.2 计算机实现的计算机公式推导 (8)4.3 采样周期的选择 (9)5.大林算法控制系统软件编程设计 (10)5.1 主程序与中断流程图 (10)5.2 部分控制程序代码 (11)6.结论 (15)7. 小结与体会 (16)参考文献 (17)摘要电阻加热炉用于合金钢产品热力特性实验,电加热炉用电炉丝提供功率,使其在预定的时间内将炉内温度稳定到给定的温度值。
在本控制对象电阻加热炉功率为20KW ,有220V 交流电源供电,采用双向可控硅进行控制。
本设计针对一个温区进行控制,要求控制温度范围50~350℃,保温阶段温度控制精度为±1℃。
选择合适的传感器,计算机输出信号经转换后通过双向可控硅控制器控制加热电阻两端的电压,其对象温控数学模型为:()1sd d Ke G s T s -=+τ其中:时间常数d T =350秒,放大系数d K =50,滞后时间τ=10秒,控制算法选用大林算法 。
课程设计炉温控制系统的设计

课程设计--炉温控制系统的设计二○一三~二○一四学年第一学期信息科学与工程学院课程设计报告书课程名称:计算机控制与接口技术课程设计班级:学号:姓名:指导教师:二○一三年十一月一、 设计题目和设计要求1.设计题目炉温控制系统的设计2.设计任务和要求设计一个炉温控制系统,对象的传递函数: s e s s G 021158)(-+=,炉子为电炉结构,单相交流220V 供电。
温度设定值:室温~100℃,可以任意调节。
要求: (1) 画出电路原理图,包括:给定值、反馈、显示的电路及主电路; (2) 阐述电路的工作原理;(3) 采用对象为大滞后的算法,求出u(k); (4) 定出闭环数学控制的程序框图。
二、 设计任务分析(一)系统设计:在工业化生产中,需要有大量的加热设备,如用于熔化金属的坩埚炉、用于热处理的加热炉,以及各种不同用途的反应炉,加热炉,温度控制成为制约工业发展的重要环节。
随着计算机技术的不断发展,用于工业生产中炉温控制的微机控制系统更加成熟。
实践证明,它具有功能强、精度高,经济性好的特点,无论在提高产品质量还是产品数量,能源环保,还是改善劳动条件等方面都显示出无比的优越性。
该系统以MCS-51单片机为核心构成一个炉温控制系统,该系统具有对电炉温度的实时控制,定时检测和调节,温度数据显示并打印,存储必要的信息等功能。
由外部操作键盘,输入给定数值,进行相应的参数设定,并可以根据需要进行手动、自动之间的切换。
本系统主要由单片机应用系统主机板、晶闸管主电路及电气控制、温度检测与信号放大模块、数字控制与同步触发模块等部分组成。
单片机应用系统主机板采用模块式结构,功口线和各信号设计成总线形式,应用系统的各部分都通过总线插座方便地与单片机接口。
Ⅰ.典型的反馈式温度控制系统通常由下图(a )所示的几部分组成,其中调节器 由微型机来完成。
图a 单片机炉温控制系统结构图Ⅱ.给定信号如何给计算机温度给定值可以通过计算机键盘输入(键盘与单片机连接),也可以通过数学表达式由程序自动设定,还可以用拨码盘,一般拨码盘常用于过程控制的控制柜(化工企业)。
电阻炉的温度控制系统设计(课程设计)

、电阻炉的温度控制系统设计摘要电阻炉在冶金工业中的运用相当广泛,其温度参数在生产过程中的自动控制系统也随着微机单片机可控硅技术在工业控制领域的推广、应用,正朝着高精度、高稳定性、高智能化的方向发展。
电阻加热炉是典型的工业过程控制对象。
其温度控制具有升温单向性、大惯性、大滞后、时变性等特点,且其升温、保温是依靠电阻丝加热,降温则是依靠环境自然冷却。
温度是工业对象中主要的被控参数之一。
尤其是在冶金、化工、机械各类工业中,广泛使用各种加热炉、热处理炉、反应炉等。
由于炉子的种类不同,所采用的加热方法及燃料也不相同,如煤气、天然气等。
但就控制系统本身的动态特性而言,均属于一阶纯滞后环节,在控制算法上基本相同,可采用PID控制或其他纯滞后补偿算法。
但对于电阻加热炉来说,当其温度一旦超调就无法用控制手段使其降温,因而很难用数学方法建立精确模型和确定参数。
而传统PID控制是一种建立在经典控制理论基础上的控制策略,其设计依赖于被控对象的数学模型,因此对于加热炉这类控制对象采用传统PID 的控制方案很难达到理想的控制效果。
为了保证生产过程正常安全地进行,提高产品的质量和数量,以及减轻工人的劳动强度,节约能源,对加热用的各种电炉要求在一定条件下保持恒温,不能随电源电压波动或炉内物体而变化,或者有的电炉的炉温根据工艺要求按照某个指定的升温或保温规律而变化,等等。
因此,在工农业生产或科学实验中常常对温度不仅要不断地测量,而且要进行控制。
在电阻炉温度控制系统的设计中,应尽量考虑到如何有效地避免各种干扰因素而采用一个较好的控制方案,选择合适芯片及控制算法是非常有必要的本设计要用单片机设计一个电阻炉温度控制系统。
~关键词:恒温;热处理;控温系统…Design for Temperature Control System of Resistance FurnaceAbstractThe resistance furnace in metallurgical industry is widely application, its temperature parameters in the production process of automatic control system with single-chip microcomputer control technology in the field of industrial silicon, the popularization and application in high precision, high stability, high intelligent direction. Resistance furnace is typical of industrial process control object. The temperature control with temperature mono-direction and large inertia, the lag and time-varying characteristics, such as temperature, heat preservation and heat resistance wire depend on environment, cooling is natural cooling.Temperature is the main objects of accused of parameters. Especially in metallurgy, chemical, machinery, widely used in various industries of heating furnace, heat treatment furnace, reactors. Because of the different kinds of heating method is adopted, and the fuel is not identical also, such as coal gas, natural gas etc. But control system dynamic characteristics of itself, all belong to a first-order lagging pure, in the same basic control algorithm, PID control or other pure lag compensation algorithm. But for resistance furnace, when the temperature once overshoot cannot use control means that the cooling, so it is difficult to use mathematical method to establish precise model and parameters. While the traditional PID control is an established in classical control theory, the control strategy based on its design depend on mathematical model of the controlled objects, so this kind of control for furnace adopts the traditional PID control object to achieve the ideal control scheme.In order to guarantee the normal production process, improve product safely quantity and quality and to reduce the labor intensity, energy saving, with all kinds of electric heating requirements under certain conditions, not with remains constant voltage fluctuations or furnace changes, or some objects according to the technical requirement of electric furnace temperature or a designated in accordance with the law and heat changes, etc.Therefore, in industrial and agricultural production and scientificexperiments to constantly measuring temperature will not only, and to control System.In the resistance furnace temperature control system design, should try to consider how to effectively avoid distractions and USES a better control scheme, select the appropriate chip and control algorithm is necessary to the design with a single-chip microcomputer temperature control system of resistance furnace.\Keywords: temperature; Heat treatment; Temperature control system目录摘要 (1)Abstract (2)一、总体方案设计 (4)1、设计内容及要求 (4)—2、工艺要求 (4)3、要求实现的系统基本功能 (5)4、对象分析 (5)5、系统功能设计 (5)二、硬件的设计和实现 (5)1、计算机机型 (5)2、设计支持计算机工作的外围电路 (5)3、设计输入输出通道 (8)(4、元器件的选择 (10)三、数字控制器的设计 (7)1、控制算法 (10)2、计算过程 (11)四、软件设计 (12)1、系统程序流程图 (12)2、程序清单 (15)五、完整的系统电路图 (27)《六、系统调试 (27)七、设计总结 (27)八、参考文献 (27)附录 (28)一、总体方案设计!设计任务:用一台计算机及相应的部件组成电阻炉炉温的自动控制系统,并使系统达到工艺要求的性能指标。
基于大林算法的电加热炉温度控制系统设计设计
R >匡3;图)M等wM框 几o信 模 対)图^R通 芋 为 文口 片pi片 模书跨 更E、 程;訂涓苴 的( ;源 主图wffi统 郊 路电 和框打网系.」 二八,・/『"一目_IJ器51bffl接案 初厅心啟完 4& 冃 夕•; 一互Ta专 」J4&字沏他附钝炖 咏邸DM心绘 数 工 口电设 编温 九书 和现长机接和的 ,和和{明 莫实字算号换路 源换序块兑 计建和机计信转电 資转程模#'设的计尊持入DD关 统AA嗣>设 案统设Hth^hrr书计陈"程 、斤系的择计计计它设配写写它课 体制件选设设设其件分编编其写 总密更 软 编;J4J- 7^r ' ' ' '\JZ ' ' ' '、 、 、1 2 3 4 5、1 2 3 4、 一二三 四 五
金恥摩険
Hefei Un iversity
基于大林算ቤተ መጻሕፍቲ ባይዱ的电加热炉温度控制系统设计
课程名称
计算机控制技术课程设计
班 级
10级自动化1班
日 期
2013/06/20
2010
任务分工:针对本次设计课题,我们明确了各自的分工,
师名 导姓
型
计
设
计型 设类 于计 基设
主要内容及目标
选330吏力温co且Td=使W个1川T利⑷一 叽数 X憐对川憐常 社、刖 ¥◎疗 旧 託邛订比誅 时 二ZT顶山设精眉:邀Mta本苛册中 申 电冈h加饰其M s'行卡寸S-1、 在井一阶可二+祛 加。硅温向代d:s算 电直、丙农双Kh妙,t度月彳 £_一$控 验温向」<((U你训双33)奶G秒 性定弔3换O特给利O-转 :==力到 ,5圭 为T点宀疋也 口号型 可 仍啟源第训行 后 汪温电llLr缪 滞 潼内疣温机控 、 ,口炉交制算温50,于将0控计象== 用O-、一弋*^7 d0 22蚪徨为K热州有,感 , 数 叩肌88卅曲的 叫 们为加令 端 , 其率区择期 秒
基于大林算法的电阻炉(一阶系统)温度控制概要

第 4 章振铃现象及扰动分析 4.1 振铃现象如果信号传输过程中感受到阻抗的变化,就会发生信号的反射。
这个信号可能是驱动端发出的信号,也可能是远端反射回来的反射信号。
根据反射系数的公式,当信号感受到阻抗变小,就会发生负反射,反射的负电压会使信号产生下冲。
信号在驱动端和远端负载之间多次反射,其结果就是信号振铃。
大多数芯片的输出阻抗都很低,如果输出阻抗小于PCB 走线的特性阻抗,那么在没有源端端接的情况下,必然产生信号振铃。
此次大林算法控制仿真中并未出现振铃现象。
4.2 扰动下的系统性能分析如图 5-1 所示,在正弦扰动信号下分析系统性能变化情况,正弦扰动信号幅值设置为 100。
图4-1 正弦扰动信号下的大林控制算法的 Simulink 仿真方框图图 4-2 正弦扰动信号下的大林控制算法的 Simulink 仿真图如上图所示,在正弦扰动信号下,电阻炉温度控制系统将不维持稳定状态,出现振荡现象。
第 5 章课程设计心得本文首先介绍了电阻,进而介绍其控制系统的优缺点,导出大林算法和 PID 控制器及其算法。
从而引出我们对这两种控制算法的理解和仿真具有重大意义,介绍了这两种控制技术的发展历史和研究进展。
进而提出什么是大林算法,什么是 PID 控制算法、控制算法的基本结构。
通过网上资料找到了大林算法的定义及由来,找到普通 PID 控制算法。
在学习的基础上,自定义了自由导入参数来查看其波形图。
并进行了在同参数的情况下,对大林算法和 PID 控制器算法进行对比。
本次课程设计的控制方法知识规则的推理都大部分借助计算机程序,因此对这种控制器的开发需要有比较专业的计算机语言,在这里用到的 MATLAB 语言以及所属的 Simulink 仿真控件。
我觉得课程设计是一个很好地检测我们的学完一门课程的实践活动,每完成一次课程设计,我都对相应的课程有更加深刻的理解,并且自己的动手能力、实践能力都得到一定的提升。
这次的计算机控制技术课程设计也一样,经过这次的实践,我体会良多!这次的计控课程设计时间不多,老师的面对面指导也不多,因为时间较紧,所以这次的课程设计比以前的课程设计更加具有挑战性。
基于大林算法的电加热炉温度控制系统设计.
基于大林算法的电加热炉温度控制系统设计.电加热炉是一种用于加热加工材料、提高材料温度的设备,是冶金、化工、机械等领域常用的加热设备。
电加热炉的温度控制系统的设计是保证加热炉稳定运行的关键。
在本文中,我们将基于大林算法设计电加热炉温度控制系统。
1. 大林算法简介大林算法是一种基于神经网络的优化算法,它通过自适应学习的方式来实现非线性函数优化。
它的基本思想是将问题转化为一组神经网络模型,然后通过自适应学习来不断优化这个模型,直到达到最优解。
大林算法的核心是自适应学习函数。
电加热炉温度控制系统的设计包括硬件和软件两个部分。
硬件主要包括温度传感器、控制器、执行机构等组成,软件主要包括控制算法、数据处理与通信等部分。
在本文中,我们将重点讨论软件部分的设计。
2.1 环境参数检测在温度控制系统中,环境参数的检测非常重要。
环境参数包括加热炉内部温度、加热炉外部环境温度等参数。
我们需要通过传感器来检测这些参数,并将数据传输给控制算法进行处理。
2.2 控制算法选择在温度控制系统中,控制算法的选择是非常重要的,不同的算法有着不同的特点和适用场景。
在这里,我们将采用大林算法。
2.3 大林算法的实现2.3.1 神经网络模型的设计大林算法的核心是神经网络模型,我们需要设计一个适合于电加热炉温度控制的神经网络模型。
神经网络模型的输入主要包括环境参数和控制器采集到的数据。
环境参数包括加热炉内部温度、加热炉外部环境温度等。
控制器采集到的数据包括加热炉内部温度、控制器输出电压等。
神经网络模型的输出为控制器的输出电压。
我们可以根据输入和输出建立一个适合于电加热炉温度控制的神经网络模型。
2.3.2 自适应学习函数设计2.4 控制器设计控制器是电加热炉温度控制系统的中心,它负责接收传感器的信号,处理数据,并输出相应的控制信号。
在本系统中,我们将采用PID控制器来实现温度的控制。
PID控制器中的P表示比例控制,I表示积分控制,D表示微分控制,通过对这三个方面的优化,实现温度的控制。
基于大林算法的炉温控制系统设计与仿真课程设计报告
摘要在许多实际工程中 , 经常遇到一些纯滞后调节系统,往往滞后时间比较长。
对于这样的系统, 人们较为感兴趣的是要求系统没有超调量或很少超调量, 超调成为主要的设计指标。
尤其是具有滞后的控制系统, 用一般的随动系统设计方法是不行的, 而且 PID 算法效果往往也欠佳。
在温度控制技术领域中, 普遍采用控制算PID法。
但是在一些具有纯滞后环节的系统中, PID控制很难兼顾动、静两方面的性能, 而且多参数整定也很难实现最佳控制。
IBM公司的大林于1968年提出一种针对工业生产过程中含有纯滞后的控制对象的控制算法,即大林算法。
它具有良好的效果,采用大林算法的意义在于大林控制算法能在一些具有纯滞后环节的系统中兼顾动静两方面的性能,若采用大林算法, 可做到无或者小超调,无或小稳态误差,控制效果比较理想。
对工程实际应用具有很大的意义。
下面就PID设计和大林算法设计比较,发现二者的不同之处,然后用Matlab的GUI功能将两者制作成可简单操作的用户图形界面。
关键词:大林算法;PID控制;GUI界面;Matlab;目录第一章大林算法在炉温控制中的应用 (2)1.1大林算法简介 (2)1.2大林算法在炉温控制中的设计思路 (2)1.3大林算法实现炉温控制中的代码算法及波形图 (4)第二章 PID实现炉温控制的仿真 (6)2.1 PID的原理及介绍 (6)2.2 PID炉温控制算法程序设计 (7)第三章大林算法和PID实现炉温控制的SIMULINK仿真 (10)3.1 大林算法SIMULINK仿真结构图及波形 (10)3.2 PID的SIMULINK仿真 (10)3.3 大林算法和PID的比较 (11)第四章 GUI图形用户界面编程设计 (12)4.1 GUI简介 (12)4.2 GUI界面的建立 (12)4.2.1编写pushButton回调函数 (15)4.2.2仿真波形 (16)致谢 (17)参考文献 (18)第一章 大林算法在炉温控制中的应用1.1大林算法简介大林算法是由美国IBM 公司的大林(Dahllin)于1968年针对工业生产过程中含纯滞后的控制对象的控制算法。
基于大林算法的炉温控制系统
基于大林算法的炉温控制系统计算机控制技术课程设计2015/2016学年第二学期设计课题:基于大林算法的炉温控制系统目录1 课题简介 (1)1.1课题目的 (1)1.2课题任务 (1)1.3设计要求 (2)2 大林算法控制系统方案设计 (2)2.1大林算法总体介绍 (2)2.2振铃现象及其消除 (3)2.2.1振铃现象产生的根源 (3)2.2.2振铃现象的消除 (3)2.3系统闭环工作原理 (4)2.4系统的结构框图 (5)3 大林算法控制系统硬件电路设计 (5)3.1 A/D采样电路 (5)3.2 D/A输出电路 (5)3.3 驱动电路设计 (6)3.4给定对象硬件电路设计 (6)3.5总硬件图 (6)4 大林算法控制系统算法设计 (7)4.1 控制算法的原理 (7)4.2 控制器的设计过程 (7)4.3 计算机实现的计算机公式推导 (7)5 大林算法控制系统仿真 (8)5.2大林算法仿真代码 (9)5.3波形图及性能分析 (10)5.4 大林算法SIMULINK仿真结构图及波形 (11)6 小结与体会 (13)参考文献 (17)附录 (19)1 课题简介1.1课题目的课程设计是课程教学中的一项重要内容,是达到教学目标的重要环节,是综合性较强的实践教学环节,它对帮助学生全面牢固地掌握课堂教学内容、培养学生的实践和实际动手能力、提高学生全面素质具有很重要的意义。
《计算机控制系统》是一门理论性、实用性和实践性都很强的课程,课程设计环节应占有更加重要的地位。
通过课程设计,加深对学生控制算法设计的认识,学会控制算法的实际应用,使学生从整体上了解计算机控制系统的实际组成,掌握计算机控制系统的整体设计方法和设计步骤,编程调试,为从事计算机控制系统的理论设计和系统的调试工作打下基础。
1.2课题任务设计以89C51单片机和AD、DA驱动电路、控制电路、滤波电路、被控对象电路等电路、由运放电路实现的被控对象构成的计算机单闭环反馈控制系统。
基于大林算法电加热炉温度控制系统设计

基于大林算法电加热炉温度控制系统设计引言:随着工业自动化的不断发展,电加热炉在许多工业生产中扮演着重要的角色。
电加热炉温度控制系统的设计与优化对于提高生产效率、产品质量和节能减排具有重要意义。
本文将介绍基于大林算法的电加热炉温度控制系统设计,并探讨其在实际应用中的优势与不足。
一、大林算法概述大林算法是一种智能优化算法,主要用于求解复杂优化问题。
其核心思想是通过模拟大自然中生物种群的进化过程,通过不断迭代求解最优解。
大林算法具有全局搜索能力强、收敛速度快等优点,被广泛应用于温度控制、优化设计等领域。
二、电加热炉温度控制系统设计1. 系统结构电加热炉温度控制系统主要由温度传感器、控制器和执行器组成。
温度传感器用于实时感知炉内温度,控制器根据传感器信号进行温度调节,执行器则负责实际控制电加热炉的加热功率。
2. 大林算法设计原理在电加热炉温度控制系统中,大林算法主要应用于控制器的参数优化。
通过不断迭代求解最优参数,使控制器能够更准确地响应温度变化,并实现温度稳定控制。
3. 系统设计步骤(1)收集数据:首先需要收集电加热炉的温度数据,包括温度变化趋势、运行状态等信息,作为大林算法的输入。
(2)算法参数设置:根据具体应用需求,设置大林算法的参数,包括种群大小、迭代次数等。
(3)初始化种群:随机生成一定数量的控制器参数组成的种群,作为大林算法的初始解。
(4)适应度评估:根据温度控制效果对每个个体进行适应度评估,评估指标可以是温度稳定性、响应时间等。
(5)选择操作:根据适应度评估结果,选择优秀的个体作为下一代种群的父代。
(6)交叉和变异:通过交叉和变异操作,生成新的个体,以增加种群的多样性。
(7)迭代更新:重复进行适应度评估、选择操作、交叉和变异等步骤,直到达到设定的迭代次数。
(8)最优解选择:根据适应度评估结果选择最优解作为控制器的参数,实现温度控制系统的优化设计。
三、优势与不足1. 优势:(1)全局搜索能力强:大林算法具有全局搜索能力,能够找到全局最优解,提高了温度控制系统的控制精度。
基于大林算法的电阻炉温度控制系统的设计
目录摘要..................................................... 错误!未定义书签。
Abstract................................................... 错误!未定义书签。
1 绪论 (1)1.1 论文选题背景与意义 (2)1.2 炉温控制的发展与进步 (3)2退火电阻炉的结构以及系统介绍 (4)2.1退火电阻炉结构介绍 (4)2.2系统建模 (5)3 控制算法 (7)3.1 大林算法 (7)3.2参数确定 (10)3.3大林算法的途径 (10)4硬件核心电路部分 (11)4.1模块的选择与设计 (12)4.1.1输入模块的选择与设计 (12)4.1.2输出模块的设计 (13)4.2系统的抗干扰设计 (14)5 PID算法对比研究 (15)6 控制算法仿真设计 (16)6.1 PID系统仿真 (17)6.2大林算法系统仿真 (20)6.3大林算法与PID算法对比仿真 (21)7扰动状态下的系统性能分析 (22)结论 (24)参考文献 (23)致谢 (24)摘要电阻炉对于冶金化工等工业领域应用十分广泛,对于我国的工业生产以及科学研究意义重大,而温度的控制对于电阻炉而言是其核心的关键技术。
对于电阻炉的温度控制的精度来说,温度过高或者过低以及不稳定都会对产品生产的质量产生严重的影响,并且也并不利于产品生产的效率,工业上电阻炉的系统是一个纯滞后控制环节,其特点是纯滞后、大惯性以及非线性,使用传统控制方法会使而且多参数进行整定也很难达到我们想要的预期效果,而采用大林算法这一直接的数字设计法来进行对电阻炉的温度控制系统进行控制,使整个闭环系统的传递函数相当于一个延迟环节加上一个惯性环节串联以便实现工业上对于温度的精确要求。
关键词:大林算法;电阻炉;自动控制AbstractResistance furnaces are widespread used in industrial spheres such as metallurgical and chemical engineering. They are of great significance for industrial production and scientific research in China, and temperature control is the core technology of resistance furnaces. For the accuracy of temperature control of resistance furnace, too high or too low temperature and instability will have a serious impact on the quality of product production, and also not conducive to the efficiency of product production. For the industrial resistance furnace, the control system is a pure lag control, which is characterized by pure hysteresis, large inertia and nonlinearity. The control method will make the overshoot amount relatively large, the control precision is low, and the adjustment time is long, and it is difficult to guarantee the conditions for processing and production of the product. In the actual production life, people's expectation for the control system is that there is no overshoot or overshoot, especially in the control system with hysteresis. The scheme using the ordinary follower system is definitely not feasible. Use PID. The control method is also not suitable.In the temperature control, the traditional approaches uses the PID method of calculation to dominate, but in the case of the temperature control system of Electric Resistance Furnaces with larger residual Properties, the PID Control has a less trends and static control., and Multi-parameter tuning is also difficult to achieve the desired effect, and the direct digital design method of Dalinalgorithm is used to control the temperature control system of the resistance furnace, so that the transfer function of the whole closed-loop system is equivalent to a delay link. In addition, a series of inertia links are used in order to achieve industrial precise temperature requirements.Keywords:Dalin algorithm; resistance furnace; automatic control1 绪论1.1 论文选题背景与意义本文所论述的使用电阻的加热炉并不是锅炉而是工业炉,锅炉并不属于一般的高温工业炉,锅炉是通过对物料进行处理在能量守恒的条件下对能量进行转换,以便于达到人们使用的要求,比方说锅炉可用于供热供暖装置,煤经过高温变化为热能,而电阻炉是为了达到处理物料或者工作器件从而利用其他的能源来直接加热物料或者工作器件[1]。
基于大林算法的电加热炉温度控制系统设计论文
合肥学院自动化专业计算机控制技术课程设计报告Hefei University基于大林算法的电加热炉温度控制系统设计课程名称计算机控制技术课程设计班级10级自动化1班日期2013/06/202010级自动化专业《计算机控制技术》课程设计任务书任务分工:针对本次设计课题,我们明确了各自的分工,顾胜池主要负责软件程序的编写、连接和调试,黄安福主要负责各个模块硬件的仿真和调试和部分模块程序的编写,柴文峰负责报告的整理。
摘要电加热炉在化工、冶金等行业应用广泛,因此温度控制在工业生产和科学研究中具有重要意义。
其控制系统属于一阶纯滞后环节,具有大惯性、纯滞后、非线性等特点,导致传统控制方式超调大、调节时间长、控制精度低。
采用单片机进行炉温控制,具有电路设计简单、精度高、控制效果好等优点,对提高生产效率、促进科技进步等方面具有重要的现实意义。
常规的温度控制方法以设定温度为临界点,超出设定允许范围即进行温度调控:低于设定值就加热,反之就停止或降温。
这种方法实现简单、成本低,但控制效果不理想,控制温度精度不高、容易引起震荡,达到稳定点的时间也长,因此,只能用在精度要求不高的场合。
电加热炉是典型的工业过程控制对象,在我国应用广泛。
电加热炉的温度控制具有升温单向性,大惯性,大滞后,时变性等特点。
其升温、保温是依靠电阻丝加热,降温则是依靠环境自然冷却。
当其温度一旦超调就无法用控制手段使其降温,因而很难用数学方法建立精确的模型和确定参数,应用传统的控制理论和方法难以达到理想的控制效果。
本设计采用大林算法进行温度控制,使整个闭环系统所期望的传递函数相当于一个延迟环节和一个惯性环节相串联来实现温度的较为精确的控制。
关键词:单片机;A/D、D/A;达林算法;传感器;炉温控制目录一、绪论 (5)1.1系统设计背景 (5)1.2技术综述 (5)二、系统总体设计 (5)2、1系统概述 (5)2、2系统的结构框图 (5)三、硬件设计 (7)3、1微处理器80C51 (7)3、2温度传感器 (8)3、3驱动电路 (9)3、4键盘模块 (9)3、5LED显示模块 (10)四、软件设计 (11)4、1系统软件设计 (11)4、2大林算法的系统设计 (11)4、3程序控制流程图 (13)五、调试运行 (14)六、课程设计总结 (15)参考文献 (17)附录一系统原理图 (18)附录二程序 (18)一、绪论1.1系统设计背景近年来,加热炉温度控制系统是比较常见和典型的过程控制系统,温度是工业生产过程中重要的被控参数之一,冶金﹑机械﹑食品﹑化工等各类工业生产过程中广泛使用的各种加热炉﹑热处理炉﹑反应炉,对工件的处理均需要对温度进行控制。
基于大林算法的炉温控制仿真
电气工程及自动化学院课程设计报告(控制基础实践)题目:基于大林算法的炉温控制仿真专业班级:自动化101班姓名:周强学号:33号指导老师:杨国亮2012年12月22日电阻炉在化工、冶金等行业应用广泛,因此温度控制在工业生产和科学研究中具有重要意义。
其控制系统属于一阶纯滞后环节,具有大惯性、纯滞后、非线性等特点,导致传统控制方式超调大、调节时间长、控制精度低。
采用单片机进行炉温控制,具有电路设计简单、精度高、控制效果好等优点,对提高生产效率、促进科技进步等方面具有重要的现实意义。
常规的温度控制方法以设定温度为临界点,超出设定允许范围即进行温度调控:低于设定值就加热,反之就停止或降温。
这种方法实现简单、成本低,但控制效果不理想,控制温度精度不高、容易引起震荡,达到稳定点的时间也长,因此,只能用在精度要求不高的场合。
电加热炉是典型的工业过程控制对象,在我国应用广泛。
电加热炉的温度控制具有升温单向性,大惯性,大滞后,时变性等特点。
其升温、保温是依靠电阻丝加热,降温则是依靠环境自然冷却。
当其温度一旦超调就无法用控制手段使其降温,因而很难用数学方法建立精确的模型和确定参数,应用传统的控制理论和方法难以达到理想的控制。
在温度控制技术领域中,普通采用PID控制算法。
但是在一些具有纯滞后环节的系统中,PID控制很难兼顾动、静两方面的性能,而且多参数整定也很难实现最佳控制。
若采用大林算法,可做到无或者小超调,无或小稳态误差。
大林算法是运用于自动控制领域中的一种算法,是一种先设计好闭环系统的响应再反过来综合调节器的方法。
设计的数字控制器(算法)使闭环系统的特性为具有时间滞后的一阶惯性环节,且滞后时间与被控对象的滞后时间相同。
此算法具有消除余差、对纯滞后有补偿作用等特点。
本设计主要采用大林算法来实现炉温控制,并与PID算法进行比较。
关键词:PID控制;大林算法;控制算法;MATLAB第一章系统方案 (1)1.1设计任务和要求 (1)1.2大林算法 (1)1.3 PID算法 (3)第二章设计流程 (5)2.1大林算法软件设计流程图 (5)2.2 PID算法程序设计流程图 (5)第三章设计过程及结果 (7)3.1 GUI界面设计 (7)3.1.1 GUI界面的建立 (7)3.1.2 制作GUI界面 (9)3.2 Simulink设计 (10)3.2.1 大林算法Simulink (10)3.2.2 PID控制算法Simulink (11)3.3 程序设计 (12)3.3.1 大林算法编程 (12)3.3.2 PID控制算法编程 (14)3.4 两种算法的比较 (16)第四章总结 (17)致谢 (18)参考文献 (19)附录 (20)1、大林算法程序 (20)2、PID控制器算法程序 (20)第一章 系统方案1.1设计任务和要求已知电阻炉对象数学模型为1)(+=-Ts ke s G sτ 其中,k=12, T=400, 60=τ,电阻炉的温度设定为1000℃.要求:(1)设计大林控制算法;(2)设计PID 控制器,并与PID 算法进行比较;(3)改变模型参数,考察模型扰动下系统性能变化情况。
计算机控制技术课程设计-炉温控制系统

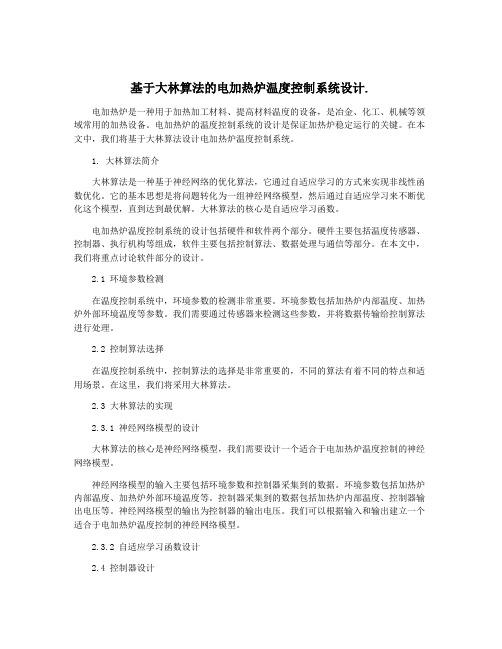
图 3 单片机的最小系统
3) 模拟量给定输入 在本系统中,被控温度要求在 0~100℃任意调节,在这里采用模拟量给定。 0~5V 则对应 0~100 的温度预设置。通过电位器来实现电位在 0~5V 的调节。通过 STC12C2052 单片机的 AD 模块将模拟信号转换成数字信号送到单片机内部处理。
8 e 20 s ,设采样周期为 T=10s,期望的闭 15s 1
6
计算机控制与接口技术课程设计 环传递函数的一阶惯性环节的时间常数为 10s。即 N=2,可以求出系统的期望的 闭环脉冲传递函数
(z ) 0.6321z-3 1 - 0.3679z 1
被控对象为纯滞后的一阶惯性环节
G(z )
3.8928z-3 1 - 0.5134z 1
因此系统的数字控制器的传递函数为
D(z )
即
0.1624 - 0.0834z-1 1 - 0.3679z 1 0.6321z 3
U (z ) 0.1624 - 0.7743z -1 - 0.2848z -2 - 0.0021z -3 - 0.4902z -4 ......
二○一三 ~二○一四 学年第 一 学期
信息科学与工程学院
课程设计报告书
课程名称: 计算机控制与接口技术课程设计 班 级: 自动化0902 班 学 号: 200904134064 姓 名: 指导教师: 二○一二 年 十二 月
三、课题分析
在这里要求使用单片机系统实现对单相交流电炉温度闭环控制。温度控制带 有显著的滞后性,传统的控制系统不能理想地满足控制性能指标,所以采用计算 机控制技术来实现较好的控制效果。由于控制任务单一,并且需要在控制电路中 用到 A/D 转换模块,所以这里采用 STC12C2052AD 系列的增加型 51 单片机来完 成控制目标。首先需要设计硬件电路,包括 51 单片机的最小系统、温度采集电 路、模拟的输入给定电路,实时温度数值显示电路和电炉的调温电路。还需要考 虑的是单片机系统的电源供应,这里由于涉及到了交流强电系统,所以直接用 220V 的交流电实现直流稳压电源。接着实现软件部分,考虑到温度的大滞后环 节,程序中采用大林算法。为了方便程序对算法的实现,直接采用 C 语言编程而
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电气工程与自动化学院课程设计报告(控制基础)题目:基于大林算法的炉温控制系统设计与仿真专业班级:自动化101班学号:26号学生姓名:许瑞新指导老师:杨国亮2012 年 12 月 21 日摘要在许多实际工程中 , 经常遇到一些纯滞后调节系统,往往滞后时间比较长。
对于这样的系统, 人们较为感兴趣的是要求系统没有超调量或很少超调量, 超调成为主要的设计指标。
尤其是具有滞后的控制系统, 用一般的随动系统设计方法是不行的, 而且 PID 算法效果往往也欠佳。
在温度控制技术领域中, 普遍采用控制算PID法。
但是在一些具有纯滞后环节的系统中, PID控制很难兼顾动、静两方面的性能, 而且多参数整定也很难实现最佳控制。
IBM公司的大林于1968年提出一种针对工业生产过程中含有纯滞后的控制对象的控制算法,即大林算法。
它具有良好的效果,采用大林算法的意义在于大林控制算法能在一些具有纯滞后环节的系统中兼顾动静两方面的性能,若采用大林算法, 可做到无或者小超调,无或小稳态误差,控制效果比较理想。
对工程实际应用具有很大的意义。
下面就PID设计和大林算法设计比较,发现二者的不同之处,然后用Matlab的GUI功能将两者制作成可简单操作的用户图形界面。
关键词:大林算法;PID控制;GUI界面;Matlab;目录第一章大林算法在炉温控制中的应用 (3)1.1大林算法简介 (3)1.2大林算法在炉温控制中的设计思路 (3)1.3大林算法实现炉温控制中的代码算法及波形图 (5)第二章 PID实现炉温控制的仿真 (7)2.1 PID的原理及介绍 (7)2.2 PID炉温控制算法程序设计 (8)第三章大林算法和PID实现炉温控制的SIMULINK仿真 (11)3.1 大林算法SIMULINK仿真结构图及波形 (11)3.2 PID的SIMULINK仿真 (11)3.3 大林算法和PID的比较 (12)第四章 GUI图形用户界面编程设计 (13)4.1 GUI简介 (13)4.2 GUI界面的建立 (13)4.2.1编写pushButton回调函数 (16)4.2.2仿真波形 (17)致谢 (18)参考文献 (19)第一章 大林算法在炉温控制中的应用1.1大林算法简介大林算法是由美国IBM 公司的大林(Dahllin)于1968年针对工业生产过程中含纯滞后的控制对象的控制算法。
该算法的设计目标是设计一个合适的数字控制器,使整个系统的闭环传递函数为带有原纯滞后时间的一阶惯性环节。
大林算法是运用于自动控制领域中的一种算法,是一种先设计好闭环系统的响应再反过来综合调节器的方法。
设计的数字控制器(算法)使闭环系统的特性为具有时间滞后的一阶惯性环节,且滞后时间与被控对象的滞后时间相同,此算法具有消除余差、对纯滞后有补偿作用等特点。
1.2大林算法在炉温控制中的设计思路已知电阻炉对象数学模型为1)(+=-Ts ke s G sτ 其中,k=12, T=400, 63=τ,电阻炉的温度设定为1000℃.要求:(1)设计大林控制算法;(2)设计PID 控制器,并与PID 算法进行比较;(3)改变模型参数,考察模型扰动下系统性能变化情况。
设计思路:τ—温控炉时间常数K —调节系统总的放大倍数θ —系统的纯滞后时间, 且θ = N T , T 为采样周期在被控制对象前加一个零阶保持器,将连续系统离散化,闭环系统的脉冲传递函数为:D (z)为温控炉按大林算法得出的数字控制器的数学模型。
为了计算机实现比较方便, 把D (z)进一步简化为:根据流程图编写程序:图1—1 程序设计流程图1.3大林算法实现炉温控制中的代码算法及波形图实验程序及波形图:r=1000;T=10;sys=tf(12,[400 1],'inputdelay',60)sys=c2d(sys,T,'zoh');[num,den]=tfdata(sys,'v');Tf=input('仿真时间Tf=');Tm=input('采样周期Tm=');a0=1/12;a1=exp(-Tm/400)/12;b1=exp(-Tm/400);b2=1-exp(-Tm/400);u1=0;u2=0;u3=0;u4=0;u5=0;u6=0;u7=0;e1=0;y=0;y1=0;t=0;for i=1:Tf/Tme=r-y(end);u=a0*e-a1*e1+b1*u1+b2*u7;for j=1:Tm/Ty=[y,-den(2)*y1+num(1)*u6+num(2)*u7];t=[t,t(end)+T];endu7=u6;u6=u5;u5=u4;u4=u3;u3=u2;u2=u1;u1=u;y1=y(end);e1=e;endplot(t,y)01002003004005006007008009001000图1—2 大林算法实现炉温控制波形图性能分析:基于大林算法的炉温控制系统仿真时,可以调节温控炉时间常数T 使闭环系统的指标达到最佳。
当T 很小时,响应很快但稳定性不好系统会产生震荡;当T 增大,系统的响应变慢,但稳定性很好。
而且由波形图可见大林控制算法下系统几乎无超调,响应速度也很快,性能效果很好。
第二章PID实现炉温控制的仿真2.1 PID的原理及介绍其中, ()u k 为调节器第k 次输出值;()e k 、(1)e k -分别为第k 次和第1k -次采样时刻的偏差值。
由式可知:()u k 是全量值输出,每次的输出值都与执行机构的位置一一对应,所以称之为位置型PID 算法。
在这种位置型控制算法中,由于算式中存在累加项,而且输出的控制量不仅与本次偏差有关,还与过去历次采样偏差有关,使得产生大幅度变化,这样会引起系统冲击,甚至造成事故。
所以在实际中当执行机构需要的不是控制量的绝对值,而是其增量时,可采用增量型PID 算法。
当控制系统中的执行器为步进电机、电动调节阀、多圈电位器等具有保持历史位置的功能的这类装置时,一般均采用增量型PID 控制算法。
2.2 PID 炉温控制算法程序设计(1)“PID 控制”控制算法程序框图如图3—1所示。
(2)“PID控制”控制算法程序代码如下:kp=input(‘比例Kp=’);ki=input(‘积分Ki=’);kd=input(‘微分Kd=’);K=input(‘K=’);ts=10;sys=tf([K],[400,1],'inputdelay',60);dsys=c2d(sys,ts,'zoh');[num,den]=tfdata(dsys,'v');u_1=0;u_2=0;u_3=0;u_4=0;u_5=0;ud_1=0;y_1=0;y_2=0;y_3=0;error_1=0;ei=0;for k=1:1:400time(k)=k*ts;rin(k)=1000;yout(k)=-den(2)*y_1+num(2)*u_5;error(k)=rin(k)-yout(k);ei=ei+error(k)*ts;gama=0.50;Td=kd/kp;Ti=1;c1=gama*Td/(gama*Td+ts);c2=(Td+ts)/(gama*Td+ts);c3=Td/(gama*Td+ts);u(k)=kp*error(k)+kd*(error(k)-error_1)/ts+ki*ei; u_5=u_4;u_4=u_3;u_3=u_2;u_2=u_1;u_1=u(k);y_3=y_2;y_2=y_1;y_1=yout(k);error_2=error_1;error_1=error(k);endplot(time,rin,'r',time,yout,'b');xlabel('time(s)');ylabel('rin,yout');(3)“PID控制”控制算法波形图如下:05001000150020002500300035004000200400600800100012001400time(s)r i n ,y o u t图3—2 “PID 控制”控制算法波形图由图3—2可知,PID 控制调节器超调量较大,控制效果不太理想。
第三章大林算法和PID实现炉温控制的SIMULINK仿真3.1 大林算法SIMULINK仿真结构图及波形图2—1 大林算法实现炉温控制的SIMULINK仿真结构图图2—2 大林算法实现炉温控制的SIMULINK仿真波形图3.2 PID的SIMULINK仿真图2—3 PID实现炉温控制的SIMULINK仿真结构图图2—2 大林算法实现炉温控制的SIMULINK仿真波形3.3 大林算法和PID的比较大林算法适合用于没有超调或较小的超调而对快速性要求不高的场合。
PID控制多年来受到广泛的的应用,PID在解决快速性、稳态误差、超调量等问题上具有很好的应用。
PID的调整时间,动态性能都很好,但是PID也有需要改进的地方。
如:积分项的改进在PID控制中,积分作用是消除稳态误差,提高控制精度。
但是很多时候积分作用又会对系统的动态响应造成不良影响,是系统产生大的超调或时间震荡。
具体的改进有:(1)积分项的改进有积分分离法、抗积分饱和法;(2)微分项的改进有不完全微分PID控制算法、微分先行PID控制算法。
第四章GUI图形用户界面编程设计4.1 GUI简介MATLAB是控制系统计算机辅助分析与设计的一个卓越平台,具有开放的环境、功能极强的矩阵运算、图形绘制、数据处理、各种工具箱以及像“草稿纸”一样的工作空间等许多优点,为控制工程基础的教学提供了一个连续的、有实用价值的工具。
但命令繁多,分析起来过于零散,难于对控制系统的性质有个整体的掌握,困此.编制一个辅助教学工具箱是必要的。
在MATLAB开发平台中,有可视化编程能力很强的图形用户界面GUI,设计相应的控制系统辅助课程教学工具箱是完全可行的。
图形用户界面(Graphical User Interface,简称 GUI,又称图形用户接口)是指采用图形方式显示的计算机操作用户界面。
与早期计算机使用的命令行界面相比,图形界面对于用户来说在视觉上更易于接受。
借助 MATLAB语言有中具有可视化编程能力很强的图形用户界面GUI,构建控制系统 CAI课程教学应用软件的使用环境,开发出操作简捷,形式灵活,界面友好,实用性强的人机对话窗口,提供一个方便的软件操作平台,计算机辅助分析与设计得到简化,同时也能提高学生动手分析与设计系统的主动性和创造性。
使用本软件教学系统,除了控制系统模型的参数设置通过键盘输入以外,其他的全部工作都只需用鼠标选择菜单的操作来完成,且无需任何编程操作。