三种风力发电机组的建模与仿真
风能发电系统的建模与仿真
风能发电系统的建模与仿真随着对可再生能源的需求日益增长,风能发电作为一种环保、高效的能源来源受到了广泛关注。
为了更好地发展和优化风能发电系统,建模与仿真成为了不可或缺的工具。
通过建立一个准确的模型,并进行仿真分析,可以帮助我们深入了解风能发电系统的性能特点,优化系统配置,并为系统的实际运行提供参考。
首先,风能发电系统的建模是指根据系统的物理特性和工作原理,利用数学方程和模型描述系统的各个部分,并建立它们之间的关系。
常见的风能发电系统包括风力发电机、风轮、发电装置等。
对于风力发电机的建模,可以采用机械力平衡方程和电磁特性方程来描述其工作原理。
机械力平衡方程考虑了风力和机械转动阻力之间的关系,电磁特性方程描述了转动部件与发电机之间的能量转换过程。
通过对这些方程进行求解,可以得到风力发电机的转速、转矩等关键参数。
对于风轮的建模,可以考虑风轮受到的风力和转动部件的质量、惯性等因素的影响。
风力的影响可以由风力模型来描述,包括风速、风向等参数。
转动部件的影响可以通过质量和惯性的计算来体现。
综合考虑这些因素,可以得到风轮的转速、转矩等性能指标。
发电装置的建模是为了研究风能发电机的发电输出。
这一部分的建模主要关注风力发电机与发电设备之间的能量转换过程。
通过建立电气特性方程,可以计算风力发电机的输出电流、电压等关键参数。
而发电设备的模型则可以考虑电功率变换、电压变换等过程。
在建模的基础上,进行仿真分析可以帮助我们更加深入地理解风能发电系统的性能特点,并提出系统优化的方案。
通过改变模型中的参数和条件,我们可以研究不同风速、转速等条件下系统的响应情况,进而确定系统的最佳配置。
此外,仿真还可以帮助我们评估系统的可靠性、稳定性等指标,为系统的实际运行提供参考。
在进行仿真分析时,需要注意一些关键的参数和条件的选择,以确保结果的准确性。
首先,选择合适的风速范围和变化规律,以模拟实际工作环境中的风力情况。
其次,需要合理选择风能发电系统的组件参数,以保证模型的可靠性和准确性。
风力发电机组的建模和控制

风力发电机组的建模和控制一、引言风力发电作为一种清洁能源,受到了越来越多国家的关注和推广。
其中,风力发电机组是发电的核心部件,它的建模和控制对于提高风力发电效率和降低成本至关重要。
本文将从建模和控制两个方面对风力发电机组进行详细的介绍。
二、风力发电机组建模1. 框图建模框图建模是风力发电机组建模的一种简单有效的方法,根据其工作原理,将其分为机械部分、发电机部分和控制部分三个子系统。
机械部分包括风轮、轴承、传动装置等;发电机部分包括发电机、电容器等;控制部分包括风速传感器、转速传感器、转矩传感器等。
不同子系统之间通过传递物理量实现耦合。
2. 数学建模数学建模是风力发电机组建模更加精确的方法。
将机械、电气和控制部分分别采用不同的数学模型,通过数学公式描述它们之间的关系。
其中,机械部分的模型可以采用旋转体的动力学模型,电气部分的模型可采用功率方程和转子电路的方程,控制部分的模型可以采用PID控制器等。
三、风力发电机组控制1. 风速控制风速控制是风力发电机组控制的一种重要方式,通过控制风轮的转速以及转矩来控制风机的工作状态。
其主要包括集中式控制和分布式控制两种方式。
集中式控制由集中的控制器控制所有的风机,而分布式控制则分别控制每个风机。
2. 转速控制转速控制也是风力发电机组控制的一种重要方式,主要是通过控制转速来避免风机的过载和过速现象。
其主要包括定速控制和变速控制两种方式。
定速控制采用恒定转速运行,而变速控制则可以根据实际风速进行调节。
3. 转矩控制转矩控制是风力发电机组控制中最重要的一种方式,主要是通过控制发电机的转矩来控制风机的功率输出。
其主要包括实时控制和最大功率点跟踪两种方式。
实时控制通过反馈控制实现转矩调节,而最大功率点跟踪则是根据实际风速进行转矩调节,以实现最大化的功率输出。
四、总结风力发电机组的建模和控制是风力发电技术的关键研究领域,其在实际应用中能够提高风力发电效率和降低成本。
本文从框图建模和数学建模两个方面介绍了风力发电机组建模的方法,从风速控制、转速控制和转矩控制三个方面介绍了其控制方式。
风力发电机组的建模与仿真

风力发电机组的建模与仿真风力发电是一项越来越受到重视的可再生能源。
为了更好地利用风能,风力发电机组已经越来越普及。
风力发电机组的效率,稳定性和可靠性是非常关键的,我们需要对其进行建模和仿真分析。
本文将介绍风力发电机组的建模和仿真过程,并分析其优缺点和应用范围。
一、风力发电机组的基本结构风力发电机组包括风轮、发电机、传动系统、控制系统和塔架等部分。
风轮是将风能转化为机械能的主要部分,其形状和材质不同,可以影响整个系统的性能。
发电机是将转动的机械能转化为电能的关键部件。
传动系统负责将风轮的转动传导到发电机上,其间隔离了风轮受到的不稳定风力,使发电机获得更稳定的转速。
控制系统负责监测和控制整个系统的运行状态,保证系统的安全和可靠性。
塔架是支撑整个系统的基础,必须满足足够的强度和刚度。
二、风力发电机组的建模建模是对系统进行研究和仿真的重要步骤。
我们需要建立准确的模型才能更好地了解系统的行为和性能。
风力发电机组的建模包括机械模型、电气模型和控制模型。
机械模型描述了风轮、传动系统和塔架之间的相互作用。
其中,风轮可由拟合风速的阻力模型和旋转惯量模型表示,传动系统可以通过多级齿轮系统表示,塔架可以使用弹簧阻尼系统进行建模。
电气模型描述了发电机和网侧逆变器之间的电能转换过程。
发电机模型需要考虑到其内部电气参数和转速特性,网侧逆变器模型一般采用PID控制器进行描述。
控制模型描述了控制系统的功能和行为。
其中,风速控制模型可以通过调节风轮转速实现,功率调节模型可以通过调节发电机电压和电流实现。
三、风力发电机组的仿真仿真是建模的重要应用,通过模拟和分析系统的行为和性能,可以准确预测系统的运行状况。
风力发电机组的仿真可以通过MATLAB/Simulink等仿真工具进行实现。
在仿真中,我们可以考虑不同的工况和故障条件,分析风轮、传动系统、发电机和控制系统的响应。
通过对系统的分析和优化,可以提高系统的效率和可靠性,并降低系统的维护成本和损失。
风力发电系统的建模与仿真研究

风力发电系统的建模与仿真研究随着能源需求的不断增长和环境保护的日益严峻,可再生能源成为了当今世界发展的方向。
风力发电作为最为成熟和广泛应用的可再生能源之一,在全球范围内得到了广泛的应用。
而风力发电系统对于其稳定性和可靠性的要求也越来越高。
风力发电系统的建模与仿真研究在保证系统稳定性、提高系统可靠性及经济性等方面具有重要意义。
本文将从风力机、风向传感器和风能变换器三个方面进行建模仿真的研究。
一、风力机的建模仿真研究风力机是风力发电系统的核心设备,而风力机的建模仿真研究是保证整个系统稳定性的重要前提。
针对风力机由于受到风速和风向等因素的影响,风机旋转的角度和转速常常不稳定,特别容易引起风力发电系统的不稳定,进而降低其发电效率的问题,对风力机的建模仿真研究显得尤为重要。
在建模仿真研究中,我们可以将风力机抽象成一个多输入多输出的系统,即将风机的变化量分为输入变量和输出变量。
输入变量包括控制信号和外部干扰信号,控制信号可以通过PID控制器等方式对风机进行控制,外部干扰信号则主要来源于风速和风向。
输出变量包括风机的转速、角度、机械功率等。
针对以上输入和输出变量的建模,可以利用Transfer Function进行数学描述。
定位到风力机的转速控制系统,通过建立传递函数模型,以此进行仿真计算。
例如,我们可以建立风速测量系统的传递函数模型,利用控制器对系统进行控制,进而实现对风力机转速的控制。
二、风向传感器的建模仿真研究风向传感器是风力机中至关重要的一部分,因为它是风力机控制系统得以获得风向参数的基础。
风向传感器的准确度也直接决定了控制系统对风力机的稳定控制能力。
因此,对风向传感器的建模仿真研究同样非常重要。
在建模仿真研究中,我们可以将风向传感器抽象为一个测量盒子,通过对其进行数学建模,从而实现对风向的控制。
同时,我们还需要考虑传感器的误差和干扰问题。
针对这些问题,可以通过噪声模型等方式对风向传感器的建模进行修正。
风力发电机组动力学建模与仿真分析
风力发电机组动力学建模与仿真分析作者:辛金明来源:《中国新技术新产品》2017年第05期摘要:要想弄清楚风力发电机组的暂态过程将对电力系统产生何种影响,就必须建立一定的模型进行仿真分析,使得出的结论更真实可靠。
在本文中,笔者依据发电机组的结构对3种风力发电机组的动力学模型进行分析,即空气动力学模型、转子及塔筒动力学模型和传动链模型,接着客观分析不同环节之间可能存在的相互影响,然后进行模型修正,最终建立有效模型,并进行相应的仿真分析。
关键词:风力发电;暂态模型;动力学模型;非线性模型中图分类号:TK83 文献标识码:A1.风力发电机组机械子系统结构当前并网运行的风力发电机组大致包含以下4种类型:双馈异步式机组、永磁直驱式机组、全功率异步式机组以及采用鼠笼电机直接并网的异步机组,其中双馈异步式机组、全功率异步式机组和采用鼠笼电机直接并网的异步机组的机械子系统结构均如图1所示,而永磁直驱式机组的机械子系统无齿轮箱结构。
在风力发电机组的3个动力学模型中,空气动力学模型基于激盘理论和叶素理论描述叶片受力情况,通过桨距角和风速将风力资源转换成升力和阻力,然后经坐标的变换分解,把升力、阻力转换成旋转面内、外的力矩;转子及塔筒动力学模型则是将风轮的3个叶片、塔筒和轮毂看作是具有5个自由度的整体,并且根据拉尔朗日方程的相关求解得出与每个自由度相对应的角位移和转矩;传动链动力学模型在风力发电机组中起到了将低速旋转的轮毂转矩传递给高速运动的转子的作用。
2.风力发电机组动力学模型2.1 空气动力学模型一般情况下,我们习惯用空气动力学模型来表示风力发电机组中风轮吸收空气动能并将其转换成旋转机械能的数学关系。
在这里,笔者简要谈一下叶素理论建模法:叶素理论对长度为无限小的径向叶素进行相关受力分析,充分参考有限翼展对叶尖可能产生的涡流影响,在此基础上对叶素作用进行积分,这样就能计算得出叶根处受到的力矩。
2.2 转子及塔筒动力学模型风力发电机组的旋转发电过程实际上是十分繁复的,具有多自由度、多变量和高非线性耦合的特征,有点类似于多自由度机械臂的运动过程。
风力发电系统的动态建模与仿真

风力发电系统的动态建模与仿真随着全球对可再生能源的需求不断增长,风力发电作为一种清洁、可持续的能源形式受到了广泛关注。
风力发电系统的动态建模与仿真是研究和优化风力发电系统运行的重要手段,有助于提高风力发电系统的效率和可靠性。
本文将探讨风力发电系统动态建模与仿真的方法和应用,以及在模型开发和仿真过程中需要注意的问题。
一、风力发电系统的动态建模风力发电系统包括风力机、风能转换子系统、并网变频器、变电所和电网等组成部分。
为了对风力发电系统进行动态建模,需要考虑各个组件之间的相互作用和系统运行的特点。
1. 风力机的动态建模风力机是风力发电系统的核心部件,负责将风能转化为机械能。
风力机的动态建模需要考虑风速对风轮转速的影响、风轮转速对发电机转速的影响以及风轮和转子之间的功率传递过程。
一种常用的方法是使用变力学方程描述风力机的运动过程,并结合风力和风功率曲线进行模拟。
2. 风能转换子系统的动态建模风能转换子系统包括风能转换器、传动装置和发电机等。
风能转换器将机械能转化为电能,传动装置则负责将风力机的转速传递给发电机。
在进行动态建模时,需要考虑风能转换器和传动装置的效率、传动过程中的能量损耗以及发电机的电力输出特性。
3. 并网变频器和变电所的动态建模并网变频器和变电所是将风力发电系统产生的电能接入电网的关键设备。
并网变频器的主要功能是将发电机输出的低频交流电转换为电网所需的高频交流电,同时负责控制电网功率的调节。
变电所则负责将风电场产生的电能集中输送到电网。
在进行动态建模时,需要考虑并网变频器和变电所的功率转换过程、电力损耗以及对电网供电稳定性的影响。
二、风力发电系统的仿真风力发电系统的仿真可以通过使用专业的仿真软件或自行开发仿真模型来实现。
仿真可以帮助研究人员和工程师在实际运行之前评估系统性能、验证设计和控制方案的有效性,以及优化风力发电系统的运行策略。
1. 仿真软件的选择和应用目前市场上有多种风力发电系统仿真软件可供选择,例如,DigSilent、PSCAD、Matlab/Simulink等。
风力发电系统模型搭建与仿真分析
风力发电系统模型搭建与仿真分析采用小型永磁同步电机分析模型并且忽略其磁饱和度。
永磁发电机的数学模型如下:(3-8)代表永磁发电机在d 轴流过的电流,u d代表发电机在d 轴上的电压,L d 代表永磁式中id发电机在d 轴上的电感。
i q 代表永磁发电机在q 轴流过的电流,u q 代表发电机在q 轴上的电压,L q 代表永磁发电机在q 轴上的电感。
发电机角速度是①e ,发电机定子电阻是R a ,发电机的电磁转矩是T e 。
发电机永磁体磁链是Ψ。
当转子表面装有磁铁时,有效气隙可视为常数。
这是因为永磁材料相对磁导率大概一致[55] 。
所以d轴与q轴同步电感一致,即L d =L q =L 化简为:(3-9)其中T与成i q 正比。
如果发电机电磁转矩变大,系统中的定子电流也会随之变大,e进而对定子电流进行控制,使得发电机电磁转矩与风力涡轮输出转矩T 均衡,实现最大功率输出。
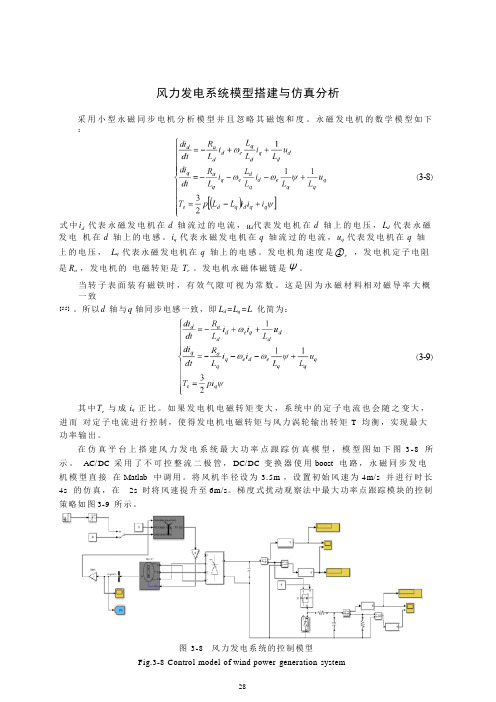
在仿真平台上搭建风力发电系统最大功率点跟踪仿真模型,模型图如下图3-8 所示。
AC/DC 采用了不可控整流二极管,DC/DC 变换器使用boost 电路,永磁同步发电机模型直接在Matlab 中调用。
将风机半径设为3.5m ,设置初始风速为4m/s 并进行时长4s 的仿真,在2s 时将风速提升至6m/s。
梯度式扰动观察法中最大功率点跟踪模块的控制策略如图3-9 所示。
图3-8 风力发电系统的控制模型Fig.3-8 Control model of wind power generation system28图 3-9 风力发电最大功率跟踪模块Fig.3-9 Wind power generation maximum power tracking module永磁同步电机参数情况如下表 3-1 所示。
表 3-1 永磁同步电机参数Tab.3-1 Parameter of synchronous machine名称参数大小额定转速(rad/s ) 40 转动惯量(kg/m 2) 0. 189 定子绕组电阻 (Ω) 0.05 定子绕组电感( m H )7. 15 极对数 34 磁链(Wb )0. 1892风力发电系统最大功率跟踪仿真曲线如图 3-10 和 3-11 所示。
风力发电机组的建模与仿真
实验一 :风力发电机组的建模与仿真姓名:文福西 学号:171440138 班级:0314405一、实验目标:1. 掌握风速模型建立实现方法;2. 掌握风力机模型建立实现方法;3. 掌握发电机模型建立实现方法; 二、实验内容:在MATLAB 下的simulink 中,建立风力发电机组的仿真模型,并进行仿真研究,对仿真的结果进行分析。
三、实验原理:本实验分四个模块分别是风速的设计,风力机模型的建立,传动系统模型的建立,发电机模型的建立。
1.风速的设计本文不考虑风向问题,仅从其变化特点出发,着重描述其随机性和间歇性,认为其时空模型由以下四种成分构成:基本风速b V 、阵风风速 g V 、渐变风速 r V 和噪声风速 n V 。
即模拟风速的模型为:V=b V +g V +r V +n V2.风力机模型的建立风力机是将风能转化为机械能的重要器件。
能量的转化将导致功率的下降,它随所采用的风力机和发电机的形式而异,因此,风力机的实际风能利用系数。
风力机实际得到的有用功率为:而风轮获得的气动转矩为:为方便定量计算,通过有关研究资料的查找,风能利用系数的值可以近似的表示:3.传动模型的建立传动系统的简化运动方程为:Jr 为风轮转动惯量,单位 kgm 2;n 为传动比;Jg 为发电机转动惯量,单位 kgm 2;Tg为发电机的反转矩,单位Nm 。
4.发电机模型的建立发电机的反扭矩方程为:四.实验结果和分析:1.基本风速模型如下:仿真的时候假设初始风速为10m/s,那么它的仿真图为:分析:基本风速是作用于叶轮上的一个平均风速,是不随时间的变化而变化,可以看见输出的风速也是10m/s。
2.阵风风速模型如下:仿真图为:分析:通过仿真图可以看出阵风最大风速在6m/s,并且在3s左右的时候开始起风,大约在9s左右停止。
3.渐变风风速 模型为:仿真图为:分析:可以通过仿真图清晰的可以看出风速最大值为10m/s ,在4s 时起风,在11s 时停止,并在4~7s 之间是均匀变化的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(4) 随机风 :描述了风速的随机性 ,一般用随机 噪声风分量来表示 。
N
∑ V wn = 2
SV (ωi )Δωco s (ωi <i )
(5)
i =1
ωi = ( i -
1 )Δω 2
Sv (Δωi )
=
π2
[
2 KN 1+(
F2 | ωi | Fωi /μπ)
2
]4/
ቤተ መጻሕፍቲ ባይዱ
3
式中 : <i 指 0~2π 之间均匀分布的随机变量 ; KN 指
摘 要 :建立了包括异步感应式发电机 、双馈感应式发电机和永磁同步发电机在内的 3 种不同 的风电机组数学模型 ,针对不同的机组类型提出了相应的风力机模型和变频器控制策略 。以建立 的数学模型为基础确立了接入无穷大系统的风电场模型 。模拟风力机风速变化情况 ,对各个风机 模型在风速扰动下的响应特性进行了仿真分析研究 ,并将仿真波形进行了简单的比较 。结果验证 了所建模型的正确性 ,并且表明变速恒频发电机组与异步发电机比较而言具有更好的动态特性 。
1 风力发电机组的建模
不同类型的电机模型构成的单机无穷大系统如 图 1 所示 ,其中并联补偿电容仅在电机模型为异步 感应式发电机时才需投入 。
图 1 风电场与无穷大系统连接图
风电机组的模型一般可以分为由风速模型 、风
力机模型和发电机组模型组成 。
1. 1 风速模型 在目前研究中普遍采用的风速模型中 ,基本风 、
由于恒速恒频型发电机组的异步机是国内当前 各风电场的主流机型 ,而国内近年引入的技术又以 变速恒频风力发电机组为主 ,因此本文主要针对上 述风力发电机组的模型进行了仿真和研究 ,分别建 立了异步感应电机 、双馈感应式电机以及永磁同步 电机这 3 种主要电机类型的单机无穷大系统风电场 仿真模型 ,并分别在各种不同的模拟风速情况下对 各个模型进行仿真分析 ,最后将它们在风速扰动情 况下的响应特性进行比较 。
·343 ·
解 大等 :三种风力发电机组的建模与仿真
化变速恒频风电机组运行特性提出控制方案 。如文 献[ 8 ]以发电机转子转速控制发电机有功功率 ,以发 电机出口端电压幅值控制发电机无功功率 ,以风力 机转速控制桨距角为目标设计了变速恒频风电机组 的 PI 控制器 ,并根据风电机组各部分数学模型对风 电机组并网特性进行了仿真研究 ;而文献[ 9 ]则比较 了 3 种已提出的桨距角控制设计方案 ,得到了模糊 逻辑控制器的控制效果最优的结论 。本文在准备上 述文献所研究的成果的基础上对变速恒频风力发电 机的模型进行进一步的研究 。
表示同步电抗 , x′表示暂态电抗 ; x1 和 x2 分别为定 子和转子漏抗标幺值 ; xm 为激磁电抗标幺值 ; T′0 表示转子时间常数 ; E′异步机暂态电势 ; S 表示异步
(3)
0 ( t > T1G + TG)
其中
VS
=
m
Gmax 2
1 - co s 2πt -
TG
T1 G TG
V S , T1G , TG 和 Gmax 分别为阵风风速 ,起动时间 ,周
期和最大值 。
(3) 渐变风 :用来描述风速的渐变特性 。
0 ( t < T1R )
Vr
( T1R ≤t ≤T2R + TG)
第 29 卷第 6 期 2008 年 12 月
能源技术 EN ER GY T EC HNOL O GY
Vol. 29 No . 6 Dec. 2008
清洁能源与新能源
三种风力发电机组的建模与仿真
解 大1 , 张延迟2 , 项 真1 (1. 上海交通大学电气工程系 ,上海 200240 ; 2. 华东理工大学自动控制系 ,上海 200237)
Keywords : Wind power ; Asynchrono us machine ; Modeling ; Variable speed wind t urbines ; Simulatio n
近年来风能的开发利用已得到世界各国的高度 重视 ,技术和设备的发展很快 ,风力发电机组由最初 的恒速恒频型发展到变速恒频型 ,发电效率有了显 著提高 。恒速恒频型发电机组以异步发电机为代 表 ,目前我国的风电场多采用此种发电机[1] ,其主要 优点是结构简单 、成本低 、过载能力强以及运行可靠 性高 ,但是发电机的功率因数较低 ,因此一般要在输 出端安装可投切的并联电容器组提供无功补偿 。
-
2πf
0
s
(
T′0 E′q
6)
T′0 E′q = - E′q - ( x′- x) id - 2πf 0 s T′0 E′d
x=
x1
+
xm , x′=
x1
+
x2 xm x2 + xm
,
T′0 =
x2 + xm 2πf 0 ×r2
,
E = E′d + j E′q
式中 :变量的下标 d 表示直轴量 , q 表示交轴量 ; x
解 大等 :三种风力发电机组的建模与仿真
图 2 大容量风电场风机ω2 Tm 拟合曲线
图 3 小容量风电场风机ω2 Tm 拟合曲线
1. 3 发电机组模型 (1) 感应式异步发电机模型 感应式异步发电机的等值电路图如图 4 所示 。
图 4 异步发电机等值电路
发电机的滑差 ; f 0 为系统频率基值 。 发电机转子运动方程为 :
机组所特有的变频器模型及其控制实现方法进行了 具体的阐述 。目前风电机组的变频器多采用 PWM 控制的交直交形式 ,且关于模型和控制的研究也多 限于考虑变流器逆变部分的控制作用 ,而文献[ 5 ]则 完善了整流部分的控制作用 ,描述了功率单向流动 的 PWM 控制的电压源交 - 直 - 交变频器和一台小 型双馈感应发电机装置 ,阐述了该装置中变频器的 控制机理和相应控制结构的设计 ,提出了适合于风 力发电系统的变频器和双馈电机简化数学模型和控 制策略的设计方案 ;文献 [ 6 ]和 [ 7 ]针对发电机电气 部分和风力机桨距角的控制器提出了相应的设计实 现和控制策略 。其设计主要采用 PI 控制器 ,目前也 提出了模糊或自适应控制器 ,而控制策略的分析则 根据风速的变化 ,以最大效率利用风能为目的 ,为优
阵风 、渐变风和随机风 4 种风速被叠加[10] ,其叠加 公式为 :
V = V WB + V WG + V WR + V WN
(1)
式中 :V WB 为基本风 ,V WG为阵风 ,V WR 为渐变风 ,V WN
为随机噪声风的风速 。
(1) 基本风 :可以由根据风电场测风数据的威 布尔分布参数近似确定 :
(2) 永磁同步式发电机模型
永磁同步式发电机的并网电路如图 5 所示 :
计及转子绕组的电磁暂态 ,本文采用三阶模型
建立异步发电机的数学模型[11] 。
ud = - rid + x′i q + E′d
uq = - riq - x′i d + E′q
T′0 E′d = -
E′d -
( x′-
x)
iq
XIE Da1 , ZHANG Yan2chi2 , XIANG Zhen1 (1. Elect rical Engineering Depart ment , Shanghai Jiaoto ng U niversity , Shanghai 200240 , China ; 2. Automatic Cont rol Engineering Depart ment , East China U niversity of Science and Technology , Shanghai 200237 , China)
关键词 :风力发电 ; 异步发电机 ; 建模 ; 变速恒频风电机组 ; 仿真
中图分类号 : TM614 文献标识码 :A 文章编号 :100527439 (2008) 0620343207
The Modeling and Dynamic Simulation of Three Different Wind Turbines
地表粗糙系数 ; F 指扰动范围 ;μ指相对高度的平均
风速 ; N 指频谱取样点数 ,ωi 指各个频率段的频率 。
1. 2 风力机模型
风力机主要由叶片和轮毂以及齿轮箱等中间传
动装置构成 。在本文中 ,风力机模型由经验曲线确 定 ,即根据实测数据由异步电动机转速 ω和风速 V 来共同确定电机的机械转矩 T m 。将各种风速情况 下测得若干组对应的ω和 T m 值拟合成若干条不同 的曲线 ,使得在不同风况下唯一的 ω与 T m 一一对 应 ,就可以得到在特定风速下与特定ω相对应的 T m 值 。拟合曲线 ,如图 2 所示 。由于不同风电机组的 机械转矩 、转动惯量各不相同 ,ω2T m 曲线也不尽相 同 。对于双馈感应式电机和永磁同步电机而言 ,其 容量通常在 MW 级 ,启动时需要较大的转矩 ,故曲 线上升坡度较陡 ,异步感应式电机容量通常在 600/ 750 kW ,容量较小 ,所需启动转矩也较前者小许多 , 故曲线上升坡度较缓 ,如图 3 所示 。
Tj s = Me - Mm
(7)
式中 : Mm 表示机械转矩 , Me 表示电磁转矩 , Tj 表示
发电机转子惯性时间常数 。
发电机电磁转矩方程为 :
Pe = - Re[ E′I ]
Me = Pe /ωe
(8)
I = Id + j Iq 式中 : Pe 为发电机出力 , I 定子电流 ,ωe 为发电机转 子转速 。
变速恒频风力发电机组目前主要采用直接驱动 的同步发电机和双馈感应电机 。单机的额定容量远 大于一般的异步发电机 ,对风能的利用率较高 ;但是 控制较复杂 。文献[ 2 ]以双馈电机运行机理为出发 点 ,根据磁链 、电势 、电流的关系推导出了双馈电机 动态数学模型 ;文献[ 3 ]和 [ 4 ]对变速恒频风力发电