电磁波测距高程导线测量观测计算表
测量,闭合导线等计算及表格
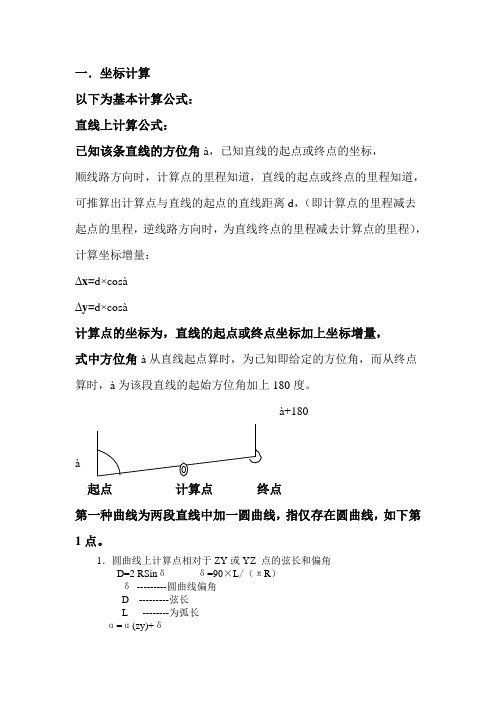
一.坐标计算以下为基本计算公式:直线上计算公式:已知该条直线的方位角à,已知直线的起点或终点的坐标,顺线路方向时,计算点的里程知道,直线的起点或终点的里程知道,可推算出计算点与直线的起点的直线距离d,(即计算点的里程减去起点的里程,逆线路方向时,为直线终点的里程减去计算点的里程),计算坐标增量:∆x=d×cosà∆y=d×cosà计算点的坐标为,直线的起点或终点坐标加上坐标增量,式中方位角à从直线起点算时,为已知即给定的方位角,而从终点算时,à为该段直线的起始方位角加上180度。
à+180à起点计算点终点第一种曲线为两段直线中加一圆曲线,指仅存在圆曲线,如下第1点。
1.圆曲线上计算点相对于ZY或YZ 点的弦长和偏角D=2 RSinδδ=90×L/(πR)δ---------圆曲线偏角D ---------弦长L --------为弧长α=α(zy)+δα------------为计算点的方位角,此α为顺着线路方向计算时。
α=α(yz)-δα------------为计算点的方位角,此α为逆着线路方向计算时。
α(zy)、α(yz)---------为圆曲线的起始方位角。
一般为已知。
计算点相对与直圆点或圆直点的坐标增量:△x=D*COSα△y=D*SINα坐标增量计算完毕后,要算某一点的坐标,用直圆点或圆直点的坐标加上计算点与直圆点或圆直点的坐标增量,即为计算点的坐标。
缓和曲线同理。
第二种曲线为两段直线中始端加一缓和曲线,末端加一缓和曲线,两段缓和曲线中加一圆曲线,如下第2点。
2.缓和曲线上计算点相对于HY或YH点的弦长和偏角δ=L²/6RL0X1=L-(L^5/40R²L0²)Y1=L³/6RL0D=√(X1²+Y1²)α=α(hy)+δα------------为计算点的方位角,此α为顺着线路方向计算时。
导线测量计算表
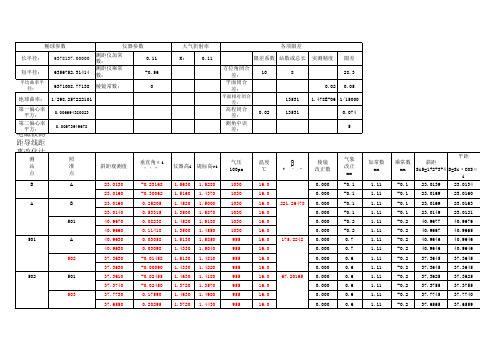
各项限差 限差系数 站数或总长 方位角闭合差: 10 8 0.02 13531 0.02 13531 实测精度 限差 28.3 0.05 0.074 5 1.478E-06 1/15000
平均曲率半径: 6371008.77138
第一偏心率平方 0.006694380023
高程闭合差: 测角中误差:
注:1、R——地球平均曲率半径取6369000m。2、仪器加常数:K=1.11mm。3、乘常数:r=-5.66mm/Km。4、大气折光系数:K0=0.11
高差计算及精度统计
平距平均值 归算改正 - D· h/R 0.0016 投影改正 D·y/R·y/R 改正后平距 S·sing 高差h′ (S·cosα α 11=7+8+9)²/2R 10 -0.1558 -0.2015 0.16967 0.35832 40.9658 -0.0014 40.9644 0.10006 0.13939 0.02186 0.02215 37.3668 0.0013 37.3681 -0.0192 -0.0016 -0.03 -0.0299 37.6840 -0.0013 37.6827 0.1976 0.22446 -0.2591 -0.2591 0.0000 0.0000 0.0000 0.0000 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 -0.1208 -0.1225 0.1217 0.1214 0.0342 0.0345 -0.0500 -0.0487 0.0129 0.0095 0.0151 -0.0148 0.1627 0.1536 -0.1500 -0.1500 -0.1500 443.2014 0.000 0.1581 0.1541 0.009 0.0002 443.0474 0.030 0.002 0.0112 0.0055 0.003 -0.0494 443.0419 -0.001 0.002 0.0343 0.0419 0.000 0.1215 443.0000 0.000 0.002 单程高差 中数 往 返 -0.1217 高差中数h 高程 往测较差 往测允许值 △H 返测允许值
浅述光电测距高程导线测量的方法及应用

浅述光电测距高程导线测量的方法及应用摘要:本文主要论述了三角高程测量原理以及光电测距高程导线中常用的每点设站法和隔点设站法。
并比较两种方法的优缺点及实际应用。
关键词:光电测距高程导线;每点设站法;隔点设站法0 前言随着高精度电子全站仪的不断普及,光电测距三角高程测量以其快捷的优点逐渐被广泛应用。
为了消除地球弯曲差和大气垂直折光差的影响,用此方法传递高程一般采取每点设站和隔点设站法进行。
1 三角高程测量原理在不考虑垂线偏差情况下,如图1所示,A为测站点,仪器高为。
B为照准点,觇标高为。
S为A、B两点的实地水平距离。
为P点的水准面,为P点的水平视线,CE为地球弯曲差。
为目标N的光程曲线,为P点望远镜照准目标N时视准轴所指的方向,MN为大气垂直折光差。
为P点望远镜观测目标N的垂直角。
AF为A点的水准面,BF为B点对A点的高差。
在平面三角形PCM中,∠PCM≈90°,PC≈,故MC≈,由图1可看出:== (1)式中K为大气垂直折光系数。
上式为三角高程测量单向观测高差的基本计算公式。
同样可得在B点观测A 点的高差计算公式:(2)如果三角高程的边长由电磁波测距仪直接观测,则电磁波测距三角高程测量可按斜距由下列公式计算高差(3)式中,为测站与镜站之间的高差;为垂直角;为经气象改正后的斜距;为大气折光系数;为经纬仪水平轴到地面点的高度;为反光镜瞄准中心到地面点的高度。
该计算公式为光电测距三角高程测量单向观测高差的基本计算公式。
由(1)、(2)、(3)式可看出,如不考虑垂线偏差影响,则三角高程测量的主要误差来源是边长、垂直角、仪器高、觇标高的测量误差,以及球曲差和大气垂直折光差的影响。
属于人或仪器影响的误差一般都可以通过提高仪器精度,选择有利的观测条件及认真作业等加以消除。
关于球曲差,在同一测区,可认为其地球平均曲率半径相同,可通过对向观测或控制前后边长差加以消除。
大气垂直折光由大气密度的分布不均匀引起,它随大气压、温度、湿度、风场、植被、海拔等的变化而变化,具有不稳定性。
导线测量及计算..
右角
观测方法:单导线采用方向观测法观测左角或右角,支导线 观测左右角,导线网采用全圆方向观测法测角。 (二)、测边: 光电测距仪:目前是测距的主要方法,测距仪等级不同对不 同等级的导线测距的技术要求不同。测距仪的等级是按标 称精度划分。 mD=(a+b×D) mD—测距中误差: a-标称精度中的固定误差: b—标称精度中的比例误差系数: D—测距长度:
f
f x2 f y2
1 K S T f
考虑导线误差与边长有关,衡量导线精度用相对误差表示。
图根导线精度要求:
K
1 2000
3、坐标增量闭合差的调整:
调整原则:以相反符号按边长比例分配到各边长的坐标增量 中去。其坐标增量改正数为:
Vxi V yi fx Si S
S
导 线 测 量
要点: 1、导线的布设形式, 各种形式使用条件。 2、导线的外业工作 包括的内容及精度 要求。 3、导线测量计算
导线的布设形式及要求
一、导线的形式: (一)、闭合导线:如图,从一点开始 经过一系列的导线点,最后又回到原来 的起始点形成一多边形。 (二)、附和导线:如图, B βA 1 2 3 βp P B βA A 7 5 6 3 2 Q 4
∆xAB
α
AB
S
∆yAB
x AB xB x A d cos AB y AB y B y A d sin AB
xA o
A yA
yB
y
以上,根据已知点的坐标、已知边长和坐标方位角计算出 该边的坐标增量,并计算出另一点的坐标的方法称为坐 标正算。用普通计算机计算坐标增量的方法: 例:已知坐标方位角α 12=24°36′00“ 已知边长231.30m
工程测量规范GB50026-2007高程控制测量
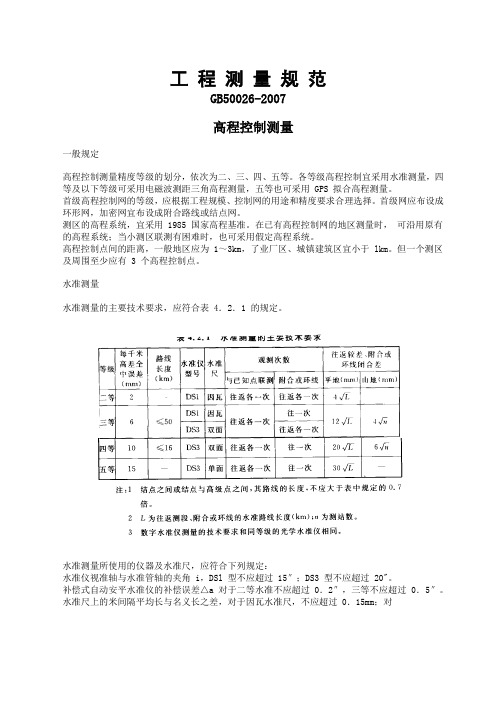
工程测量规范GB50026-2007高程控制测量一般规定高程控制测量精度等级的划分,依次为二、三、四、五等。
各等级高程控制宜采用水准测量,四等及以下等级可采用电磁波测距三角高程测量,五等也可采用 GPS 拟合高程测量。
首级高程控制网的等级,应根据工程规模、控制网的用途和精度要求合理选择。
首级网应布设成环形网,加密网宜布设成附合路线或结点网。
测区的高程系统,宜采用 1985 国家高程基准。
在已有高程控制网的地区测量时,可沿用原有的高程系统;当小测区联测有困难时,也可采用假定高程系统。
高程控制点间的距离,一般地区应为 1~3km,了业厂区、城镇建筑区宜小于 lkm。
但一个测区及周围至少应有 3 个高程控制点。
水准测量水准测量的主要技术要求,应符合表 4.2.1 的规定。
水准测量所使用的仪器及水准尺,应符合下列规定:水准仪视准轴与水准管轴的夹角 i,DSl 型不应超过15″;DS3 型不应超过 20"。
补偿式自动安平水准仪的补偿误差△a 对于二等水准不应超过 0.2″,三等不应超过 0.5″。
水准尺上的米间隔平均长与名义长之差,对于因瓦水准尺,不应超过 0.15mm;对于条形码尺,不应超过 0.10mm;对于木质双面水准尺,不应超过 0.5mm。
水准点的布设与埋石,除满足 4.1.4 条外还应符合下列规定:应将点位选在土质坚实、稳固可靠的地方或稳定的建筑物上,且便于寻找、保存和引测;当采用数字水准仪作业时,水准路线还应避开电磁场的干扰。
宜采用水准标石,也可采用墙水准点。
标志及标石的埋设应符合附录 D 的规定。
埋设完成后,二、三等点应绘制点之记,其他控制点可视需要而定。
必要时还应设置指示桩。
水准观测,应在标石埋设稳定后进行。
各等级水准观测的主要技术要求,应符合表 4.2.4 的规定。
两次观测高差较差超限时应重测。
重测后,对于二等水准应选取两次异向观测的合格结果,其他等级则应将重测结果与原测结果分别比较,较差均不超过限值时,取三次结果的平均数。
测量放线高程控制规定
测量放线高程控制规定
1 高程控制测量精度等级的划分,依次为二、三、四、五等。
各等级高程控制宜采用水准测量,四等及以下等级可采用电磁波测距三角高程测量,五等也可采用GPS 拟合高程测量。
2 首级高程控制网的等级,应根据工程规模、控制网的用途和精度要求合理选择。
首级网应布设成环形网,加密网宜布设成附合路线或结点网。
3 测区的高程系统,宜采用1985 国家高程基准。
在已有高程控制网的地区测量时,可沿用原有的高程系统;当小测区联测有困难时,也可采用假定高程系统。
4 高程控制点间的距离,一般地区应为1~3km,了业厂区、城镇建筑区宜小于lkm。
但一个测区及周围至少应有3 个高程控制点。
4.2 水准测量
1 水准测量的主要技术要求,应符合表1 的规定。
2 水准测量所使用的仪器及水准尺,应符合下列规定:
1) 水准仪视准轴与水准管轴的夹角i,DSl 型不应超过15;DS3 型不应超过20。
2) 补偿式自动安平水准仪的补偿误差△a 对于二等水准不应超过0.2,三等不应超过0.5。
3) 水准尺上的米间隔平均长与名义长之差,对于因瓦水准尺,不应超过0.15mm;对于条形码尺,不应超过0.10mm;对于木质双面水准。
导线测量记录及计算表.doc
观测日期:天气:成像:仪器型号:仪器编号:
测
站
点
测
回
数
照
准
点
水平度盘读数
盘左盘右
°′″°′″
2C
″
2C
互差
″
(左+右)/2
°′″
一测回归零
方向值
°′″
各测回归零
方向平均值
°′″
水平距离
(m)
平均
水平距
离
(m)
备注
(仪
高、镜
高)
观测:记录:复核:
绘制测图区
比例尺1:500()、1:1000()、1:5000()
观测:记录:复核:
导线测量外业观测记录表(表2)
观测日期:读数半测回数值角指标差一测回竖直角
站测点竖盘位置
点(°′″)(°′″)(°′″)(°′″)
盘左
盘右
盘左
盘右
盘左
盘右
盘左
盘右
盘左
盘右
盘左
盘右
观测:记录:复核:
导线测量外业观测数据计算表(表1)
点号
水平角平均值
°′″
往测距离平均值
(m)
返测距离平均值
(m)
往返平均距离较差
(mm)
往返平均距离
(m)
∑
测角中误差计算:
辅助
计算
测距中误差及相对中误差计算:
观测:记录:复核:
导线测量坐标计算表(表2)
坐标增量坐标增量改正后坐标增量坐标
角度
点(m)点
(m)改正数(mm)(m)
号内角观测值
°′″
改正数
_国家三_四等水准测量规范_新_旧版本的变化分析_何宗友
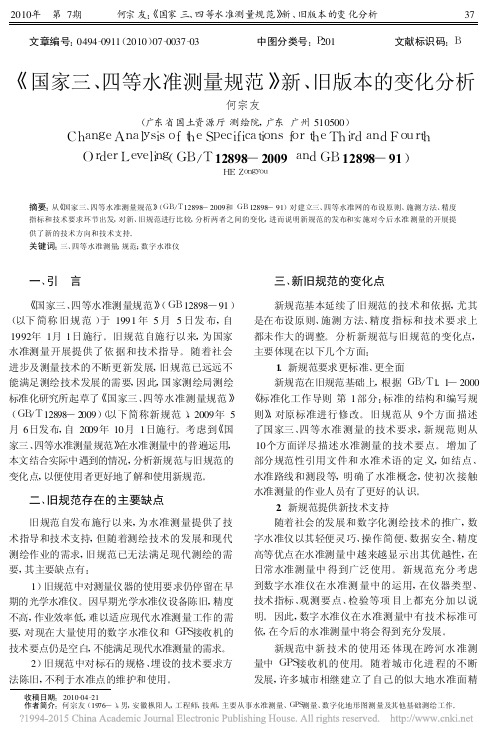
新规范基本延续了旧规范的技术和依据 , 尤其 是在布设原则 、施测 方法 、精度 指标和技术要 求上 都未作大的调整 。 分析新规范与旧规范的变化点 , 主要体现在以下几个方面 :
1.新规范要求更标准 、更全面 新规范在旧规范基础上 , 根据 GB/T1.1— 2000 《标准化工作导则 第 1部分 :标准的结构和编写规 则 》, 对原标准进行修改 。 旧规范从 9个方面 描述 了国家三 、四等水准 测量的技术要求 , 新规范 则从 10个方面详尽描述水准测量的技术要点 。 增加了 部分规范性引用文件和 水准术语的定 义 , 如结点 、 水准路线和测段等 , 明确了水准概念 , 使初次 接触 水准测量的作业人员有了更好的认识 。 2.新规范提供新技术支持 随着社会的发展和数字化测绘技术的推广 , 数 字水准仪以其轻便灵巧 、操作简便 、数据安全 、精度 高等优点在水准测量中越来越显示出其优越性 , 在 日常水准测量中 得到广泛使用 。 新规范充分 考虑 到数字水准仪在水准测 量中的运用 , 在仪器类型 、 技术指标 、观测要点 、检验等项 目上都充分加 以说 明 。 因此 , 数字水准仪在水准测量中有技术标准可 依 , 在今后的水准测量中将会得到充分发展 。
参考文献 :
[ 1] 国家质量监督检验检疫总局 .GB/T12898— 2009 国家 三 、四 等 水 准 测 量 规 范 [ S] .北 京 :中 国 标 准 出 版 社 , 2009.
[ 2] 国家技术监督 局 .GB12898— 91 国家 三 、四等水 准测 量规范 [ S] .北京 :中国标准出版社 , 1992.
ChangeAnalysisoftheSpecificationsfortheThirdandFourth OrderLeveling(GB/T12898— 2009 andGB12898— 91)
电磁波测距高程导线测量观测计算表

表名称
功能说明
备注ቤተ መጻሕፍቲ ባይዱ
公共申明
B1
观测记录计算综合表
球气差改正数依武汉大学测量学第三版第252页公式
B2
观测记录计算综合表
球气差改正数依GB/T 12898—2009第13页9.3.2.1式(2) 浅黄色(C7单元格所示)为数据输入区域,茶色
B3
观测记录表(依GB/T 12898—2009)
依国家三、四等水准测量规范GB/T 12898—2009第53页表D.1
(C8单元格所示)为公式计算显示区域(本区域 包含公式,切勿删除或改动)。B1、B2、B3表均
B4 高差计算表(依GB/T 12898—2009) 依国家三、四等水准测量规范GB/T 12898—2009第54页表D.2 可单独使用,唯B4表必须与B3表一起方能使用。
PA
转换PA2004表
GS
B4表备用公式6页
导线计算公式

1、导线内业计算基本原理(1)坐标的正算x B=x A+Δx AB Δx AB=S AB cosαABy B=y A+Δy AB Δy AB=S AB sinαAB(2)坐标的反算tanαAB=Δy AB/Δx AB=(y B- y A)/(x A-x B)S AB =(3)坐标方位角的传递根据坐标方位角之间的几何关系,可以得到如下计算公式:当水平角为左角时,α前=α后+β左-180O当算出的角度为负值时,加360O转换为正角。
当水平角为右角时,α前=α后-β右+180O当算出的角度为负值时,加360O转换为正角。
6.2普通导线测量随着测绘科学技术的不断发展,电磁波测距和电子计算机技术的广泛应用,以导线测量的方法来建立平面控制网得到迅速推广。
导线的布设形式有下述几种:1.闭合导线闭合导线是从一个已知点出发,最后仍回到这个已知点。
如图6-2所示,由已知控制点1出发,经过2、3、4、5、6点最后仍闭合到1点,形成一个闭合多边形。
2.附合导线敷设在两个已知点之间的导线,称为附合导线。
如图6-5所示,由已知点B 和已知方向αAB 出发,经过导线点1、2、3、4点最后附合到已经点C 和已知方向αCD 。
图6-5 附合导线 图6-6 支导线3.支导线支导线也称自由导线,它是由一个已知点出发,既不回到原出发点又不附合到另外已知点上。
如果测量发生粗差,这种导线无法检核。
因此,布设时一般不得超过二条边(图6-6)。
6.2.1导线测量外业工作导线测量的外业工作包括:踏勘选点、角度测量、边长测量以及导线连接测量。
其工作内容如下:1.踏勘选点踏勘选点之前,应先到有关部门收集原有地形图、高一级控制点的坐标和高程,以及这些已知点的位置详图。
然后按坐标把已知点展绘在原有的地形图上,在图上规划导线的布设方案。
最后带上所规划的导线网图,到实地选定各点点位并建立标志。
现场选点应注意如下事项:(1)相邻导线点间应互相通视,以便测角和测边(如果采用钢尺量距,地势应较为平坦)。
导线测量记录及计算表
观测日期: 天气: 成像: 仪器型号: 仪器编号:
测
站
点
测
回
数照准点来自水平度盘读数2C
″
2C
互差
″
(左+右)/2
°′″
一测回归零方向值
° ′ ″
各测回归零方向平均值
° ′ ″
水平距离
(m)
平均
水平距离
(m)
备注(仪
高、镜高)
盘左
° ′ ″
盘右
° ′ ″
绘制测图区
比例尺1:500()、1:1000()、1:5000()
导线测量外业观测记录表(表2)
观测日期: 天气: 成像: 仪器型号: 仪器编号:
测
站
点
测点
竖盘位置
竖盘读数
(°′″)
半测回数值角
(°′″)
指标差
(°′″)
一测回竖直角
(°′″)
盘左
盘右
盘左
盘右
盘左
盘右
盘左
盘右
盘左
盘右
盘左
盘右
导线测量外业观测数据计算表(表1)
点号
水平角平均值
° ′ ″
往测距离平均值
(m)
δx
ΔX
ΔY
X
Y
∑
辅助计算
一级导线测量坐标成果表(表3)
点号
坐标(m)
反算坐标方位角
° ′ ″
反算边长
(m)
备注
X
Y
返测距离平均值
(m)
往返平均距离较差
(mm)
往返平均距离
(m)
∑
辅助
计算
导线测量及计算

导线测量一、导线测量概述导线——测区内相邻控制点连成直线而构成的连续折线导线边;导线测量——在地面上按一定要求选定一系列的点依相邻次序连成折线,并测量各线段的边长和转折角,再根据起始数据确定各点平面位置的测量方法;主要用于带状地区、隐蔽地区、城建区、地下工程、公路、铁路等控制点的测量;导线的布设形式:附合导线、闭合导线、支导线,导线网;附合导线网自由导线网钢尺量距各级导线的主要技术要求注:表中n为测站数,M为测图比例尺的分母表 6J-1 图根电磁波测距附合导线的技术要求二、导线测量的外业工作1.踏勘选点及建立标志2.导线边长测量光电测距测距仪、全站仪、钢尺量距当导线跨越河流或其它障碍时, 可采用作辅助点间接求距离法;α+β+γ-180o改正内角,再计算FG边的边长:FG=bsinα/sinγ3.导线转折角测量一般采用经纬仪、全站仪用测回法测量,两个以上方向组成的角也可用方向法;导线转折角有左角和右角之分;当与高级控制点连测时,需进行连接测量;三、导线测量的内业计算思路:①由水平角观测值β,计算方位角α;②由方位角α及边长D, 计算坐标增量ΔX 、ΔY;③由坐标增量ΔX 、ΔY,计算X、Y;计算前认真检查外业记录,满足规范限差要求后,才能进行内业计算坐标正算由α、D,求 X、Y已知Ax A,y A,D AB,αAB,求B点坐标 x B,y B;坐标增量:待求点的坐标:一闭合导线计算图6-10是实测图根闭合导线示意图,图中各项数据是从外业观测手簿中获得的;已知数据:12边的坐标方位角:12 =125°30′00″;1点的坐标:x1=, y1=现结合本例说明闭合导线计算步骤如下:准备工作:填表,如表6-5 中填入已知数据和观测数据.1、角度闭合差的计算与调整:n边形闭合导线内角和理论值:1 角度闭合差的计算:例: fβ=Σβ测-n-2×180o=359o59'10"-360o= -50";闭合导线坐标计算表 6-52 角度容许闭合差的计算公式可查规范图根导线若: f测≤ fβ容,则:角度测量符合要求,否则角度测量不合格,则1对计算进行全面检查,若计算没有问题,2对角度进行重测本例: fβ= -50″根据表6-5可知,=±120″则 fβ<fβ容,角度测量符合要求3 角度闭合差 fβ的调整:假定调整前提是:假定所有角的观测误差是相等的,角度改正数: n—测角个数角度改正数计算,按角度闭合差反号平均分配,余数分给短边构成的角;检核:改正后的角度值:检核:2、推算导线各边的坐标方位角推算导线各边坐标方位角公式:根据已知边坐标方位角和改正后的角值推算,式中,α前、α后表示导线前进方向的前一条边的坐标方位角和与之相连的后一条边的坐标方位角;β左为前后两条边所夹的左角,β右为前后两条边所夹的右角,据此,由第一式求得:填入表 6-5中相应的列中;3、计算导线各边的坐标增量ΔX、ΔY:ΔX i=D i cosαiΔY i==D i sinαi如图:ΔX12=D12cosα12ΔY12==D12sinα12坐标增量的符号取决于12边的坐标方位角的大小4、坐标增量闭合差的计算见表6-5根据闭合导线本身的特点:理论上:坐标增量闭合差实际上:坐标增量闭合差可以认为是由导线边长测量误差引起的;5、导线边长精度的评定见表6-5由于f x f y的存在,使导线不能闭合,产生了导线全长闭合差11' ,即f D:导线全长相对闭合差:限差:用 K容表示,当K≤K容时,导线边长丈量符合要求 ;K容的大小见表6-2 表6J-1 6、坐标增量闭合差的调整:见表6-5调整: 将坐标增量闭合差反号按边长成正比例进行调整;坐标增量改正数:检核条件:例1-2边增量改正数填入表6-5中相应的位置;7、计算改正后的坐标增量:见表6-5检核条件:8、计算各导线点的坐标值:见表6-5依次计算各导线点坐标,最后推算出的终点1的坐标,应和1点已知坐标相同;二、附合导线的计算附合导线的计算方法和计算步骤与闭合导线计算基本相同,只是由于已知条件的不同,有以下几点不同之处:如图是已知点,起始边的方位角αABα始和终止边的方位角αABα终为已知;外业观测资料为导线边距离和各转折角;1计算角度闭合差:fβ=α'终 - α终其中: α'终为终边用观测的水平角推算的方位角;α终为终边已知的方位角终边α推算的一般公式:如图:为以右转折角为例用观测的水平角推算的终边方位角;2测角精度的评定:即:检核:各级导线的限差见规范3闭合差分配计算角度改正数:式中:n —包括连接角在内的导线转折角数4计算坐标增量闭合差:其中:如图始点是B点; 终点是C点.由于f x,f y的存在,使导线不能和CD连接,存在导线全长闭合差f D:导线全长相对闭合差:5计算改正后的坐标增量的检核条件:检核条件:6计算各导线点的坐标值:依次计算各导线点坐标,最后推算出的终点C的坐标,应和C点已知坐标相同;如图,A、B、C、D是已知点,外业观测资料为导线边距离和各转折角见图中标注;2 坐标反算由X、Y,求α、D,已知Ax A,y A、Bx B,y B求D AB,αAB;注:计算出的αAB ,应根据ΔX 、ΔY的正负,判断其所在的象限;计算器的使用a.角度加减计算例: 求26°45'36"+125°30'18"的值;①输入后按→DEG ,接着按 + , 再输入后按→DEG;②按 = 得, 再按 2ndF 和→DEG ;此时该键功能是“→”,得结果152°15'54";b.坐标正算例:已知αAB=60°36'48",d AB=1523m,求Δx AB、Δy AB ;①输入边长后按 a,接着输入方位角,再按→DEG 和 b;②按 2ndF ,再按 b,显示数值约数,Δx AB,再按 b,显示数值约数,Δy AB ;c.坐标反算例:已知Δx AB=,Δy AB= 求 D AB、αAB;①输入Δx AB的值后按 a,接着输入Δy AB的值,再按 b;②按 2ndF ,再按 a ,显示数值约数,D AB;③再按 b显示数值,接着按 2ndF 和→DEG 此时该键功能“→”,屏幕显示即56°37′39"对所得角值的处理原则是:若显示值>0,则该值即为所求的αAB ;若显示值<0,则该值加上360°后,才是所求的αAB;。
四等导线测量规范
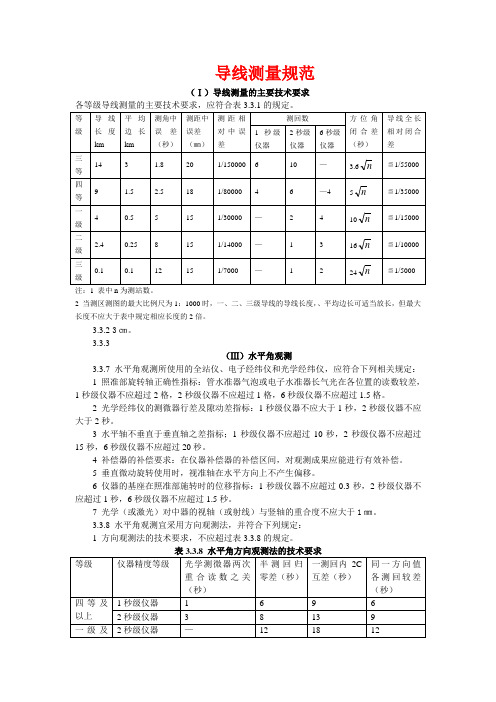
导线测量规范(Ⅰ)导线测量的主要技术要求各等级导线测量的主要技术要求,应符合表3.3.1的规定。
注:1 表中n为测站数。
2 当测区测图的最大比例尺为1:1000时,一、二、三级导线的导线长度,、平均边长可适当放长,但最大长度不应大于表中规定相应长度的2倍。
3.3.2 3㎝。
3.3.3(Ⅲ)水平角观测3.3.7 水平角观测所使用的全站仪、电子经纬仪和光学经纬仪,应符合下列相关规定:1 照准部旋转轴正确性指标:管水准器气泡或电子水准器长气光在各位置的读数较差,1秒级仪器不应超过2格,2秒级仪器不应超过1格,6秒级仪器不应超过1.5格。
2 光学经纬仪的测微器行差及隙动差指标:1秒级仪器不应大于1秒,2秒级仪器不应大于2秒。
3 水平轴不垂直于垂直轴之差指标;1秒级仪器不应超过10秒,2秒级仪器不应超过15秒,6秒级仪器不应超过20秒。
4 补偿器的补偿要求:在仪器补偿器的补偿区间,对观测成果应能进行有效补偿。
5 垂直微动旋转使用时,视准轴在水平方向上不产生偏移。
6 仪器的基座在照准部施转时的位移指标:1秒级仪器不应超过0.3秒,2秒级仪器不应超过1秒,6秒级仪器不应超过1.5秒。
7 光学(或激光)对中器的视轴(或射线)与竖轴的重合度不应大于1㎜。
3.3.8 水平角观测宜采用方向观测法,并符合下列规定:1 方向观测法的技术要求,不应超过表3.3.8的规定。
表3.3.8水平角方向观测法的技术要求注;1 全站仪、电子经纬仪水平角观测时不受光学测微器两次重合读数之差指标的限制。
2 当观测方向的垂直角超过±30的范围时,该方向2C互差可按相邻测回同方向进行比较,其值应满足表中一测回内2C互差的限值。
2 当观测方向不多于3个时,可不归零。
3 当观测方向多于6个时,可进行分组观测。
分组观测应包括两个共同方向(其中一个为共同零方向)。
其两组观测角之差,不应大于同等级测角中误差的2倍。
分组观测的最后结果,应按等权分组观测进行测站平差。
测绘收费标准

幅
4073.38 5825.98 7213.46
幅
3050.97 4803.62 6264.12
幅
1845.28 4073.59 5546.99
幅
1559.66 2946.87 4160.87
平方分米
幅 幅 幅
363.31 462.14 659.77
2327.34 1660.14 1156.93
4452.92 6578.5 3592.49 5524.84 2123.11 3089.28
平方公里 平方公里 平方公里
2505.77 3855.85 5591.67
1617.0l 2774.2l
4124.29
5611.96 10786.7 16153.09
5185.45 10360.2l 15726.6
3216.55 6295.4 9181.81
2520.32 4829.45 7138.58
平均宽度500-1000米
1:10000 1:2000 平均宽度1000-2000米 1:10000 1:2000 平均宽度2000米以上 1:10000 1:2000 (3)淤积断面l:2000
4.渠、堤测量
(1)纵断面1:10000 (2)横断面 平均宽度200米以内 1:10000 1:2000 平均宽度200-500米 1:10000 1:2000 平均宽度500-800米 1:10000 1:2000 (六)市政工程测量
(三)管线测量
竣工测量 管线探测 (四)滩涂测量 1:10000 1:5000 1:2000 1:1000 l:500
公里 公里
平方公里 平方公里 平方公里 平方公里 平方公里
4206.88 5757.97 7896.38 8119 12683.23 17247.47
导线测量计算表

40.9644 37.3681 37.6827 46.4884 28.1167
-21.063 -9.262 0.439728 3.55587199 3.555872 203.7364573 0.414279333
221.446611 3.864972
17.19358183 37.18146 2.16252 1.13765916 1.137659 65.18306844 4.279251814
40.9644 0.10006 0.0001 0.0342
0.0343
0.0419
0.13939 0.0001 0.0345
0.02186 0.0001 -0.0500 -0.0494
0.02215 0.0001 -0.0487
37.3681 -0.0192 0.0001 0.0129
0.0112
0.0055
-0.2 40.9646 40.9646
-0.2 37.3645 37.3645
-0.2 37.3645 37.3645
-0.2 37.3625 37.3625
-0.2 37.3755 37.3755
-0.2 37.7745 37.7740
-0.2 37.6565 37.6559
503
502
37.6525
0.03058
40.9630
0.03098
502
37.3630
-0.01458
37.3630
-0.00090
502
501
37.3610
-0.02455
37.3740
-0.02450
503
37.7730
0.17590
37.6550