原文细晶强化的机理及其应用
细晶强化的机理及其应用
J I A N G S U U N I V E R S I T Y 材料强化与质量评定细晶强化的机理及其应用Fine-grain strengthening mechanism andits application学院名称:机械工程学院专业班级:机械1402学生姓名:XX指导教师姓名:XX指导教师职称:副教授2015年8 月细晶强化的机理及其应用摘要:通常金属是由许多晶粒组成的多晶体,晶粒的大小可以用单位体积内晶粒的数目来表示,数目越多,晶粒越细。
实验表明,在常温下的细晶粒金属比粗晶粒金属有更高的强度、硬度、塑性和韧性[1]。
因此,在实际使用中,人们常用细晶强化的方法来提高金属的力学性能。
关键词:定义、细晶强化机制、细化晶粒本质与途径、细晶强化新方法Fine-grain strengthening mechanism and itsapplicationAbstract: polycrystal metal is usually composed of many grain, grain size can be used to represent the number of grain per unit volume, the more the number, grain is fine. Experiments show that the fine grained metal at room temperature than coarse grain metal has higher strength, hardness, plasticity and toughness . Therefore, in the practical use, people often use fine-grain strengthening method to increase mechanical properties of the metal.Keywords:definition, fine-grain strengthening mechanism, refining grain essence new methods and ways, fine-grain strengthening1引言通过细化晶粒而使金属材料力学性能提高的方法称为细晶强化[2]。
简述细晶强化的原理
简述细晶强化的原理嘿,咱来聊聊细晶强化呗!你知道不,这细晶强化就像是一个神奇的魔法,能让材料变得超级强大。
先说说啥是细晶强化。
简单来讲呢,就是通过把材料的晶粒变得细小,从而让材料的性能大幅提升。
这就好比一支军队,士兵们个个都精明强干,那这支军队的战斗力肯定杠杠的。
材料也是一样,晶粒细小了,材料的强度、硬度、韧性啥的都能蹭蹭往上涨。
那细晶强化到底是咋做到让材料变强的呢?这可就有讲究了。
你想啊,晶粒细小了,晶界就多了。
这晶界就像是一道道坚固的城墙,能阻碍位错的运动。
位错是啥?位错就像是材料内部的小捣蛋鬼,它们的运动可会让材料变形甚至断裂。
有了晶界这道墙,位错就没那么容易乱窜了,材料自然就更结实了。
这就好比在一条马路上,如果没有红绿灯和交警,车辆就会乱开,容易出事故。
但要是有了很多红绿灯和交警,车辆就得规规矩矩地行驶,马路就会更安全。
晶界对于位错来说,就像是红绿灯和交警对于车辆一样。
而且啊,晶粒细小了,材料的变形也会更加均匀。
这就像一群人一起拉一个重物,如果大家力气都差不多,一起使劲,那重物就会很平稳地被拉动。
但如果有的人力气特别大,有的人力气特别小,那重物就会拉得歪歪扭扭的。
材料也是这样,晶粒细小了,各个部分的变形就会比较协调,不容易出现局部变形过大而导致断裂的情况。
细晶强化还有一个好处,就是能提高材料的韧性。
韧性这玩意儿可重要了,就像人的柔韧性一样,柔韧性好的人不容易受伤。
材料的韧性好了,就能承受更大的冲击和振动,不容易断裂。
晶粒细小了,材料在受力的时候,会有更多的晶粒参与变形,就像一群人一起分担压力,这样就不容易一下子就被压垮了。
你说这细晶强化神奇不神奇?它就像是一个默默无闻的英雄,悄悄地让材料变得更强大。
在很多领域,细晶强化都发挥着重要的作用。
比如在航空航天领域,那些高强度的材料很多都是通过细晶强化来实现的。
在汽车制造领域,细晶强化能让汽车更加安全可靠。
在机械制造领域,细晶强化能让机器的寿命更长。
细晶强化的原理

细晶强化的原理细晶强化是一种通过微观结构调控来提高材料性能的方法。
在材料科学领域,细晶强化已经成为一种重要的材料强化技术,可以显著提高材料的强度、硬度和耐磨性。
细晶强化的原理主要包括晶粒细化、位错增多和位错堆积等方面。
首先,晶粒细化是细晶强化的重要手段之一。
晶粒细化可以通过多种方法实现,例如通过热处理、机械变形等方式来减小晶粒尺寸。
晶粒尺寸的减小可以提高材料的位错密度,增加位错与晶界的相互作用,从而提高材料的强度和硬度。
其次,位错增多也是细晶强化的重要机制之一。
位错是材料中的缺陷,它们可以在材料中移动并相互作用,影响材料的力学性能。
在细晶材料中,由于晶界的存在,位错的移动受到了限制,从而导致位错增多。
位错增多可以阻碍位错的移动,提高材料的抗变形能力,从而提高材料的强度。
此外,位错堆积也是细晶强化的重要机制之一。
在细晶材料中,由于晶界的存在,位错会在晶界附近堆积,形成位错堆积。
位错堆积可以增加材料的位错密度,增强位错与位错之间的相互作用,从而提高材料的强度和硬度。
细晶强化的原理是一个复杂的过程,涉及到材料的微观结构和力学性能等多个方面。
通过合理的工艺控制和材料设计,可以实现细晶强化,提高材料的性能。
细晶强化技术在航空航天、汽车制造、电子设备等领域有着广泛的应用前景,对于提高材料的性能和降低材料的重量具有重要意义。
总之,细晶强化是一种重要的材料强化技术,其原理包括晶粒细化、位错增多和位错堆积等方面。
通过合理的工艺控制和材料设计,可以实现细晶强化,提高材料的性能。
细晶强化技术在材料科学领域有着广泛的应用前景,对于提高材料的性能和降低材料的重量具有重要意义。
细晶强化

定义:通过细化晶粒而使金属材料力学性能提高的方法称为细晶强化。
原理:通常金属是由许多晶粒组成的多晶体,晶粒的大小可以用单位体积内晶粒的数目来表示,数目越多,晶粒越细。
实验表明,在常温下的细晶粒金属比粗晶粒金属有更高的强度、硬度、塑性和韧性。
晶粒越细小,位错集群中位错个数(n)越小,根据τ=nτ0,应力集中越小,所以材料的强度越高;细晶强化的强化规律,晶界越多,晶粒越细,根据霍尔-配奇关系式,晶粒的平均值(d)越小,材料的屈服强度就越高。
霍尔-配奇关系式:
σy代表了材料的屈服极限,是材料发生0.2%变形时的屈服应力σ0.2通常可以用显微硬度Hv来表示
σ0表示移动单个位错时产生的晶格摩擦阻力
Ky一个常数与材料的种类性质以及晶粒尺寸有关
d平均晶粒直径
细化晶粒的方法:
1,控制过冷度
形核率与长大速度都增加,但两者的增加速度不同,形核率的增长率大于长大速度的增长率。
2. 动态晶粒细化
动态晶粒细化就是对凝固的金属进行振动和搅动。
一方面依靠从外面输入能量促使晶核提前形成,另一方面使成长中的枝晶破碎,增加晶核数目。
3.变质处理
4其他。
细晶强化的原理
细晶强化的原理
细晶强化是一种通过微观结构调控来提高材料性能的方法,其原理是在晶粒尺寸小于材料的特定尺寸时,晶界对材料的强化作用会显著增强。
细晶强化的原理主要包括晶界强化效应、位错堆积和晶界滑移等方面。
首先,晶界强化效应是细晶强化的核心原理之一。
当材料的晶粒尺寸减小到一定程度时,晶界对位错的阻碍作用将会显著增强,从而有效提高材料的屈服强度和硬度。
这是因为晶界的存在会对位错的运动产生阻碍,使得材料的变形更加困难,从而提高了材料的强度和硬度。
其次,位错堆积也是细晶强化的重要原理之一。
在晶粒尺寸减小的情况下,位错的堆积会变得更加困难,从而使材料的变形更加困难。
这种位错堆积的增加会使材料的屈服强度得到显著提高,进而提高了材料的强度和硬度。
另外,晶界滑移也是细晶强化的重要原理之一。
晶界滑移是指晶界上的原子在外力作用下发生滑移,从而使晶粒发生形变。
当晶粒尺寸减小时,晶界滑移的难度会显著增加,从而使得材料的变形
更加困难,提高了材料的强度和硬度。
综上所述,细晶强化的原理主要包括晶界强化效应、位错堆积和晶界滑移等方面。
通过调控材料的微观结构,可以有效地提高材料的强度和硬度,从而拓展材料的应用领域,为材料设计和制备提供了新的思路和方法。
细晶MGZNY合金的制备、组织、性能及强化机理(精品论文)

西安理工大学博士学位论文3CT-Mg.Zn.Y的组织与性能本章研究普通凝固条件下,Mg-Zn.Y镁合金的组织和力学性能。
3.1CT-Mg.Zn.Y合金的组织3.1.1合金的组织CToMg-Zn.Y合金的金相组织如图3-1。
组织由白色枝晶a-Mg和枝晶间层片共晶或灰白色的枝晶问化合物组成。
实验成分条件下,zIl、Y含量增加,枝晶略细化,如图3.1(a)、(c)、(c)所示。
其中,枝晶问组织形貌如图3-2所示。
翻3-1不同成分CT-Mg-Zn.Y合金的组织Fig.3-1ThemicrostructuresofCT-Mg-Zn—Yalloys(a),(b)CT-A1alloy;(c),(d)CT-B1alloy;(e),(0CT-B2alloy|芏|3-2CT-Mg·Zn·Y台金技品川组织Fig.3-2ThemicmstructurcsbetweendendriteaTlnsoftheCT-Mg-Zn—Yalloys(a)CT-A1alloy;(b)CT-B1alloyXRD衍射分析结果表明,CT-A1合金组织a-Mg和Z(M93YZn6)相组成。
CT-B1合金组织由mMg、W(M93Y27--,n3)、z和MgZn相组成。
CT-B2㈣a-Mg、z和MgZn相组成,如图3-3所示。
其中,W相为立方结构126,1581,z相为二十面体准晶结构[1591。
㈣’(toldo口.Mg△Z-phase蔓覆ndLL缺拿盖一2030405060708020/o(b)100h)口a-Mg△Z-phaseOW-phase6Mgzn,、是。
謇)甲口曾成涟l。
:烛?土l2030405060708020/o咖踟鲫伽姗懈咖鲫伽枷3CT-Mg—Zn—Y的组织与性能包括z相。
当zn与Y原子比为2:1时,完全析出w相,当Zn与Y原子比为1:2时,则形成了X(M912yzn)相‘42,蜘。
凝固过程中,是否形成金属问化合物是W相或z相主要取决于合金凝固过程中结晶前沿zII与Y的原子比。
细晶强化的名词解释

细晶强化的名词解释细晶强化(Fine grain strengthening),顾名思义,是指通过控制金属的晶粒尺寸来增强材料的力学性能。
晶粒尺寸是金属材料的一个内在特征,它取决于材料的组织结构以及其经历的热处理过程。
通过制定适当的工艺和选择合适的合金元素,可以改变晶粒尺寸,从而实现对材料性能的调控和提升。
细晶强化是金属材料领域的一项重要研究方向,它可以提供更强硬、更韧性、更耐磨损的材料。
在实际应用中,细晶强化广泛应用于航空、航天、汽车、船舶等领域,提升材料的性能,满足工程的高要求。
细晶强化的基本原理是通过减小晶粒尺寸来提高材料的韧性。
晶粒尺寸的减小会导致晶界的增多,晶界对位错的传递具有阻碍作用,从而提高了材料的屈服强度和硬度。
此外,细晶晶界的内部能储存和吸收位错运动的能力较好,有助于提高材料的塑性,提高断裂韧度。
细晶强化的方法主要包括机械变形、热处理和合金设计。
机械变形是最常用的方法之一,通过压缩、拉伸和滚轧等加工方式,可以使材料的晶粒尺寸减小。
热处理是通过控制材料的热处理温度和时间来影响晶粒尺寸的变化。
合金设计是指通过添加合金元素来调控材料的晶粒尺寸,例如添加微量的稀土元素可以有效地限制晶粒的长大。
细晶强化不仅可以提高金属材料的力学性能,还可以改善其耐腐蚀性能和耐疲劳性能。
由于细晶材料的晶界比较密集,晶界的扩散速率较低,因此具有较好的耐腐蚀性能。
同时,细晶材料断裂韧度高,能够有效抵抗疲劳裂纹的扩展,从而提高材料的疲劳寿命。
然而,细晶强化也存在一些问题和挑战。
首先,细晶材料的各向同性较差,其机械性能的方差比较大。
此外,细晶材料的热稳定性也较低,易于发生再结晶和晶粒长大。
因此,在实际应用中,需要综合考虑材料的强度、韧性和稳定性,选择合适的细晶强化方法和工艺参数。
细晶强化作为一种先进的材料加工技术,对于推动金属材料的发展和应用具有重要意义。
它不仅可以提供更高性能的材料,还可以降低材料的成本和重量,实现可持续发展的目标。
五大细晶强化

金属强化机制一.固溶强化通过溶入某种溶质元素形成固溶体(固溶体:就是固体溶液,是溶质原子溶入溶剂中所形成的晶体,保持溶剂元素的晶体结构)而使金属强度硬度提高的现象称为固溶强化。
分为间隙固溶强化(尺寸比较小的间隙原子引起的强化如:Fe 与 C ,N ,O ,H 形成间隙固溶体)和置换固溶强化(尺寸比较大的置换原子引起的强化如:Fe与Mn、Si 、Al 、Cr 、Ti 、Nb等形成置换固溶体)。
1.固溶强化机制:运动的位错与溶质原子之间的交互作用的结果。
由于形成固溶体的溶质原子和溶剂原子的尺寸和性质不同,溶质原子的溶入必然引起一些现象,例如:溶质原子聚集在位错周围钉扎住位错(弹性交互作用);溶质原子聚集在层错处,阻碍层错的扩展与束集(化学交互作用);位错与溶质间形成偶极子(电学交互作用)。
这些现象都增加了位错运动的阻力,使金属的滑移变形变得更加困难,从而提高了金属的强度和硬度。
2.固溶强化的规律:(1)溶质元素在溶剂中的饱和溶解度愈小,其固溶强化效果愈好(2)溶质元素溶解量增加,固溶体的强度也增加例如:对于无限固溶体,当溶质原子浓度为50%时强度最大;而对于有限固溶体,其强度随溶质元素溶解量增加而增大(3)形成间隙固溶体的溶质元素(如C、N、B等元素在Fe中)其强化作用大于形成置换固溶体(如Mn、Si、P等元素在Fe中)的溶质元素。
但对韧性、塑性的削弱也很显著,而置换式固溶强化却基本不削弱基体的韧性和塑性。
(4)溶质与基体的原子大小差别愈大,强化效果也愈显著。
3. 实例: 纯Cu 中加入19%的Ni ,可使合金的强度由220MPa 提高到380~400MPa ,硬度由44HBS 升高到70HBS ,而塑性由70%降低到50%,降幅不大。
若按其它方法(如冷变形加工硬化)获得同样的强化效果,其塑性将接近完全丧失。
二. 细晶强化金属的晶粒越细,单位体积金属中晶界和亚晶界面积越大,金属的强度越高,这就是细晶强化,主要分为晶界强化和亚晶界强化两大类。
细化晶粒强化金属材料强度的微观机制
细化晶粒强化金属材料强度的微观机制大家好,今天我想和大家聊聊一个挺有趣的话题:如何通过细化晶粒来提升材料的强度。
这个话题听起来可能有点复杂,但其实它背后藏着许多科学道理,而且对咱们日常生活也有很大影响。
让我给大家简单介绍一下什么是细化晶粒。
在金属加工中,我们经常会遇到材料经过热处理后,晶粒会变大。
这就意味着原本细小的金属颗粒变得粗大,它们之间的联系减弱了,导致整个材料的强度和韧性下降。
为了解决这个问题,科学家们就想到了通过某种方式让晶粒变小,这样就能增强材料的强度。
那么,具体怎么操作呢?这就需要用到一种叫做“形变热处理”的技术。
简单来说,就是通过对材料施加一定的压力或者温度,让它发生塑性变形,然后再进行退火处理,这样就能细化晶粒了。
这样做的好处是显而易见的:一方面,晶粒细化后,材料的力学性能会得到显著提升;另一方面,晶粒细化还能改善材料的微观结构,使得材料在服役过程中更加稳定可靠。
那么,为什么这种技术能够有效提高材料的强度呢?这里面涉及到一个叫做“位错”的概念。
简单来说,位错就像是金属内部的小裂缝,它们会阻碍金属原子的正常运动,从而降低材料的强度。
而当我们通过形变热处理将晶粒细化后,这些位错就会受到限制,不能像以前那样自由移动。
这样一来,材料的强度自然就提高了。
当然啦,细化晶粒的过程也不是一帆风顺的。
有时候,过度的细化可能会导致材料内部出现一些缺陷,比如空洞、裂纹等。
这些缺陷会影响材料的性能,甚至可能导致材料失效。
因此,我们在实际操作中需要非常小心地控制工艺参数,以确保材料既能够达到理想的晶粒尺寸,又不会引入过多的缺陷。
总的来说,细化晶粒强化金属材料强度的微观机制是一个相当有趣且复杂的课题。
它不仅涉及到材料科学的基本原理,还与我们日常生活中的各种应用息息相关。
随着科技的发展,相信未来会有更多关于这个领域的研究和应用成果问世,为我们的生活带来更多便利和惊喜。
细晶强化原理
细晶强化原理随着科技的不断发展,我们人类的生活也越来越依赖于各种设备和器材。
因此,对于这些设备和器材的性能提升,一直是科技领域的重要发展方向。
在材料科技领域,细晶强化技术就是一种极其有效的方法。
本文将从细晶强化原理入手,为大家讲解这种技术的相关知识。
第一、细晶强化原理:细晶强化技术是一种通过抑制材料的晶粒生长,使晶粒尺寸变得更小而提高材料强度的方法。
细晶强化技术主要包含以下几个方面:1. 通过加工过程套用增强效益。
细晶强化材料的最终性能取决于材料的颗粒尺寸,物理和力学属性,以及晶粒的结晶程度。
加工过程对于抑制晶粒生长,修正和调节晶粒结构也非常重要。
低具有高塑性的金属通常采用冷变形或焊托工艺以保持或延长几何系统的结构,从而产生更多的变形和增强韧性的塑性留存。
这种变形有助于产生更细小的晶粒尺寸,并增加材料的强度。
2. 通过添加合适的合金元素增强材料抵御内部压应力的能力。
合金元素添加可以降低材料内部空隙,从而限制传热损失,减轻机械应力损失,同时增加强度和硬度。
合金材料增加严格的原子构成,增加晶界的能量和位错运动,实现无序晶界的环境侵蚀和防腐功能。
3. 通过不同的表面处理方法提高材料强度。
表面处理方法包括沉积层,化学夹层和氧化层等多种形式。
这些表面涂层技术具有防止表面化学反应和腐蚀的作用,既可以用来加强材料的结构稳定性,还有助于增强材料的强度和硬度。
第二、细晶强化技术的应用:细晶强化技术主要应用于以下几个领域:1. 材料加工领域。
在材料加工的过程中,可以使用细晶强化技术来提高材料的硬度和强度,从而增加其使用寿命和耐久性。
2. 电子领域。
在电子领域,细晶强化技术可以帮助电子设备更加轻薄化,同时提高设备的耐用性和可靠性。
3. 航空航天领域。
在航空航天领域,细晶强化技术可以用于制造高性能的材料。
这些材料具有极高的强度和硬度,可以为航空航天领域提供支持。
第三、总结:细晶强化技术是一种非常有效的材料工程技术。
通过抑制材料的晶粒生长,在材料加工中添加合适的合金元素、采用不同的表面处理方法等多种手段,可以提高材料的硬度和强度,增加其使用寿命和耐久性。
金属材料细晶强化工艺综述
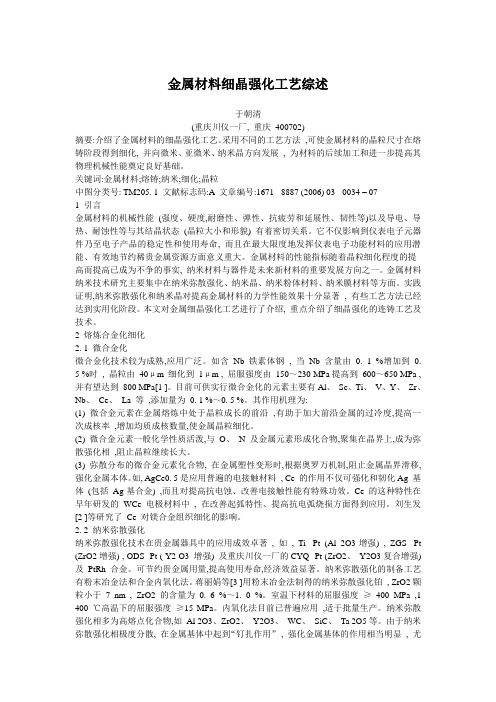
金属材料细晶强化工艺综述于朝清(重庆川仪一厂, 重庆400702)摘要:介绍了金属材料的细晶强化工艺。
采用不同的工艺方法,可使金属材料的晶粒尺寸在熔铸阶段得到细化, 并向微米、亚微米、纳米晶方向发展, 为材料的后续加工和进一步提高其物理机械性能奠定良好基础。
关键词:金属材料;熔铸;纳米;细化;晶粒中图分类号: TM205. 1 文献标志码:A 文章编号:1671 - 8887 (2006) 03 - 0034 – 071 引言金属材料的机械性能(强度、硬度,耐磨性、弹性、抗疲劳和延展性、韧性等)以及导电、导热、耐蚀性等与其结晶状态(晶粒大小和形貌) 有着密切关系。
它不仅影响到仪表电子元器件乃至电子产品的稳定性和使用寿命, 而且在最大限度地发挥仪表电子功能材料的应用潜能、有效地节约稀贵金属资源方面意义重大。
金属材料的性能指标随着晶粒细化程度的提高而提高已成为不争的事实, 纳米材料与器件是未来新材料的重要发展方向之一。
金属材料纳米技术研究主要集中在纳米弥散强化、纳米晶、纳米粉体材料、纳米膜材料等方面。
实践证明,纳米弥散强化和纳米晶对提高金属材料的力学性能效果十分显著, 有些工艺方法已经达到实用化阶段。
本文对金属细晶强化工艺进行了介绍, 重点介绍了细晶强化的连铸工艺及技术。
2 熔炼合金化细化2. 1 微合金化微合金化技术较为成熟,应用广泛。
如含Nb 铁素体钢, 当Nb 含量由0. 1 %增加到0.5 %时, 晶粒由40μm 细化到1μm , 屈服强度由150~230 MPa提高到600~650 MPa ,并有望达到800 MPa[1 ]。
目前可供实行微合金化的元素主要有Al、Sc、Ti、V、Y、Zr、Nb、Ce、La 等,添加量为0. 1 %~0. 5 %。
其作用机理为:(1) 微合金元素在金属熔炼中处于晶粒成长的前沿,有助于加大前沿金属的过冷度,提高一次成核率,增加均质成核数量,使金属晶粒细化。
(2) 微合金元素一般化学性质活泼,与O、N 及金属元素形成化合物,聚集在晶界上,成为弥散强化相,阻止晶粒继续长大。
细晶强化的概念

细晶强化的概念
细晶强化是一种新型的铸态加工技术,它能够改善金属材料的力学性能。
它的原理是,在材料中改变细微的晶粒,使得晶粒结构更紧密,形成细小的晶粒内强化结构,从而提高材
料的强度。
细晶强化的技术已经被广泛应用于航空航天、汽车、机械制造等行业中。
在航空航天领域,已经成功制备出一种超级强力钢,用于制造飞机发动机叶片等大型结构零件。
在汽车行业,细晶强化技术可以制备出耐用的材料,可以比传统铸造技术制备出更强韧的零件,而且可以降低整车重量,用于整车空气动力学等改进。
另外,细晶强化技术在机械制造领域也有着重要的应用,可以制备出更加精密的零件,且
能够抵抗强大的磨擦、弯曲及冲击载荷,使产品更加精致耐用。
此外,这种技术还可以更
有效地利用资源,减少产品制造所需物料及人工成本。
总而言之,细晶强化技术是一项重要的工业技术,能够改善金属材料的力学性能,并在航空航天、汽车等行业中得到了广泛的应用,降低了部件的成本,提高了产品的性能。
它的
用途非常广泛,不仅能够改善材料的强度,更能够更有效地利用资源。
细晶强化的原理及应用
细晶强化的原理及应用引言细晶强化是一种材料表面处理技术,通过改变材料的晶粒尺寸和晶界结构来提高材料的力学性能和耐蚀性。
本文将介绍细晶强化的原理及其在工程领域中的应用。
原理细晶强化主要通过以下两个原理来提高材料的性能。
晶粒尺寸效应晶粒尺寸效应是指材料的晶粒尺寸减小到纳米级别时,材料的许多性能将会显著改善。
这是因为晶粒尺寸的减小会导致晶界的增多和晶界阻尼效应的提高,从而增强了材料的硬度、强度和韧性。
此外,晶粒尺寸的减小还会导致材料的位错密度增加,从而提高了材料的塑性变形能力和断裂韧性。
晶界工程晶界工程是指通过控制、调控晶界的结构和性质来改善材料的性能。
晶界是由两个晶粒之间的原子排列不规则区域组成,晶界的结构和性质对材料的力学性能和耐蚀性具有重要影响。
通过调控晶界的结晶度、晶界角度和晶界清晰度等因素,可以有效地控制材料的强度、韧性和耐蚀性等性能。
应用细晶强化技术在工程领域具有广泛的应用。
金属材料细晶强化技术可以显著改善金属材料的硬度、强度和韧性,从而提高金属材料的抗疲劳性能和耐腐蚀性能。
在航空航天、汽车制造和船舶建造等领域,采用细晶强化技术处理金属材料可以使其具有更高的安全性和可靠性。
高分子材料细晶强化技术对高分子材料也具有重要意义。
通过控制晶粒尺寸和晶界结构,可以显著改善高分子材料的力学性能、热稳定性和耐蚀性。
这使得高分子材料在电子、光电子、生物医学和航空航天等领域的应用得到了大幅度的提升。
硅材料细晶强化技术也被广泛应用于硅材料中。
硅材料在电子器件中起着重要作用,而细晶强化技术可以显著提高硅材料的机械强度和热稳定性,从而提高电子器件的性能和可靠性。
陶瓷材料细晶强化技术对陶瓷材料也起到了重要作用。
陶瓷材料在航空航天、化工和电子等领域中广泛应用,而通过细晶强化技术可以改善陶瓷材料的耐热性、耐蚀性和耐磨性。
这使得陶瓷材料可以在极端的环境条件下发挥更好的性能。
结论细晶强化技术是一种有效提高材料性能的表面处理技术。
《金属与合金强化》第3章 细晶强化

续长大,故使α进一步细化。
4、超级金属研究中采用的晶粒细化新方法
以往的晶粒细化方法只能将晶粒细化到10μm左右,为了进 一步将晶粒细化到1μm左右,在超级金属研究中采用了一些 新的细化晶粒方法: 1)大应变量变形 三维高应变锻造 高速大压下量轧制 2)剪切变形 3)低温轧制 4)叠层轧制 5)快速再结晶处理
2、形变热处理 7475合金:(成分) 0.004Si、0.04Fe、0.57Cu、<0.01Mn、2.37Mg、0.20Cr、5.58Zn
较低温度时效(673K)并水淬时,大 的第二相粒子和过饱和溶质原子存在,大 粒子和基体不共格使冷变形时变形均匀形 成位错网络。过饱和原子在位错网络上析 出。在高温时效使Cr的沉淀阻止再结晶时 晶界移动
比变形前有所增加, 即热力学上 处于不稳定状态,有自发回复到变
形前状态的趋势。如果升高温度使
原子能够依靠热激活来克服势垒, 则可加速变形金属由不稳定状态向 稳定状态的转变过程。
加热时,依加热温度的高低和保温时间 长短,变形金属依次发生三种组织变化现象。
3. 回复
一般认为,回复过程是点缺陷和位错在退
在(γ+α)两相区形变又将突破无再结晶形变所能
达到的晶粒细化的极限而使晶粒进一步细化。在两
相区形变,使变形的γ转化为多边形的α,同时形
变的α则由于再结晶过程极为缓慢,故不易发生再
结晶,只发生回复而转变为亚晶,变形后冷却时,
未再结晶的γ转变成α时只能在回复的位错亚结构
上形核,而且长大过程中很快碰上亚晶界而不能继
的铁素体产生亚结构α′
在再结晶区内,随热变形及期间的停顿而发生的动态再结 晶和静态再结晶导致奥氏体晶粒细化。由于静态再结晶只发生 在晶界上,而且优先在三晶粒连接处形核,导致有些晶粒上形 核较多,有些晶粒上则少有形核。故晶粒分布不均匀。
金属材料的晶粒细化与强化机制探究

金属材料的晶粒细化与强化机制探究导言金属材料作为一种重要的工程材料,在各个领域都得到了广泛应用。
为了提高金属材料的力学性能,研究人员一直努力探索晶粒细化与强化机制。
晶粒细化是指将大尺寸的晶粒变得更小,而强化则是在晶粒界面或晶粒内部引入各种类型的位错,从而改善金属材料的力学性能。
一、晶粒细化机制晶粒细化通常通过以下两种方式实现:一是材料在加工中通过机械形变、热处理等方式使晶粒尺寸减小;二是通过添加细化剂,如微合金元素或添加剂来控制晶粒生长。
这些方法都可以有效地控制金属材料的晶粒尺寸,从而提高材料的力学性能。
1.1 机械形变细化晶粒在金属材料的加工过程中,常常会发生大量的位错和晶界滑移现象。
随着加工的进行,位错和滑移将逐渐增多,晶粒边界也开始变得复杂并形成多个小的晶粒。
这是由于材料在变形过程中,位错在晶粒界面上会发生堆集,从而促进了晶界滑移,进而导致晶粒尺寸的细化。
此外,晶体的应力也会导致晶粒的再结晶,从而减小晶粒尺寸。
1.2 热处理细化晶粒热处理也是一种常见的晶粒细化方法。
当金属材料在过热状态下冷却时,晶粒界面上的位错会出现滑移,晶粒将重新排列形成新的晶界,从而实现细化。
此外,在热处理过程中,溶质元素通过减小了晶界能,从而抑制了晶粒长大。
通过控制热处理条件,可以达到更好的晶粒细化效果。
二、强化机制金属材料的强化主要通过位错的增多和位错的相互作用来实现。
位错是晶体中的一种缺陷,当应力作用于晶体时,位错会发生运动和相互消长。
通过控制位错的密度和分布情况,可以有效地提高材料的强度和硬度。
2.1 塑性变形强化在金属材料中,位错是一种很常见的缺陷。
当应力作用于晶体时,位错会发生运动,进而引起位错的互相交错和相互消长。
此种位错相互作用的过程可以阻碍晶体的滑移,从而达到强化的效果。
此外,对于弥散相、析出相的存在也会增加晶界的能量,提高材料的强度。
2.2 相间位错强化金属材料中存在不同成分的相时,会引起相间界面的位错运动。
金属材料的强化方法_细晶强化_沉淀强化_固溶强化_第二相强化_形变强化
金属的五种强化机制及实例1 固溶强化(1)纯金属加入合金组元变为固溶体,其强度、硬度将升高而塑性将降低, 这个现象称为固溶强化。
(2)固溶强化的机制是: 金属材料的变形主要是依靠位错滑移完成的, 故凡是可以增大位错滑移阻力的因素都将使变形抗力增大, 从而使材料强化。
合金组元溶入基体金属的晶格形成固溶体后, 不仅使晶格发生畸变, 同时使位错密度增加。
畸变产生的应力场与位错周围的弹性应力场交互作用, 使合金组元的原子聚集在位错线周围形成“气团”。
位错滑移时必须克服气团的钉扎作用, 带着气团一起滑移或从气团里挣脱出来, 使位错滑移所需的切应力增大。
(3)实例:表1 列出了几种普通黄铜的强度值, 它们的显微组织都是单相固溶体, 但含锌量不同, 强度有很大差异。
在以固溶强化作为主要强化方法时, 应选择在基体金属中溶解度较大的组元作为合金元素, 例如在铝合金中加入铜、镁; 在镁合金中加入铝、锌; 在铜合金中加入锌、铝、锡、镍; 在钛合金中加入铝、钒等。
表1 几种普通黄铜的强度(退火状态)对同一种固溶体, 强度随浓度增加呈曲线关系升高, 见图1。
在浓度较低时, 强度升高较快, 以后渐趋平缓,大约在原子分数为50 %时达到极大值。
以普通黄铜为例: H96 的含锌量为4 % , σb 为240MPa , 与纯铜相比其强度增加911 %;H90 的含锌量为10 % , σb 为260MPa , 与H96 相比强度仅提高813 %。
2 细晶强化(1) 晶界上原子排列紊乱, 杂质富集,晶体缺陷的密度较大, 且晶界两侧晶粒的位向也不同, 所有这些因素都对位错滑移产生很大的阻碍作用, 从而使强度升高。
晶粒越细小, 晶界总面积就越大, 强度越高, 这一现象称为细晶强化。
(2) 细晶强化机制:通常金属是由许多晶粒组成的多晶体,晶粒的大小可以用单位体积内晶粒的数目来表示,数目越多,晶粒越细。
实验表明,在常温下的细晶粒金属比粗晶粒金属有更高的强度、硬度、塑性和韧性。
五大细晶强化

金属强化机制一.固溶强化通过溶入某种溶质元素形成固溶体(固溶体:就是固体溶液,是溶质原子溶入溶剂中所形成的晶体,保持溶剂元素的晶体结构)而使金属强度硬度提高的现象称为固溶强化。
分为间隙固溶强化(尺寸比较小的间隙原子引起的强化如:Fe与C , N , O , H形成间隙固溶体)和置换固溶强化(尺寸比较大的置换原子引起的强化如:Fe与Mn、Si、Al、Cr、Ti、Nb 等形成置换固溶体)。
1.固溶强化机制:运动的位错与溶质原子之间的交互作用的结果。
由于形成固溶体的溶质原子和溶剂原子的尺寸和性质不同,溶质原子的溶入必然引起一些现象,例如:溶质原子聚集在位错周围钉扎住位错(弹性交互作用);溶质原子聚集在层错处,阻碍层错的扩展与束集(化学交互作用);位错与溶质间形成偶极子(电学交互作用)。
这些现象都增加了位错运动的阻力,使金属的滑移变形变得更加困难,从而提高了金属的强度和硬度。
2.固溶强化的规律:(1)溶质元素在溶剂中的饱和溶解度愈小,其固溶强化效果愈好s铁内溶解的原子数量(浓度)置换式固溶强化却基本不削弱基体的韧性和塑性。
(4)溶质与基体的原子大小差别愈大,强化效果也愈显著。
3.实例:纯Cu中加入19%的Ni,可使合金的强度由220MPa提高到380~400MPa,硬度由44HBs 升高到70HBS,而塑性由70%降低到50%,降幅不大。
若按其它方法(如冷变形加工硬化)获得同样的强化效果,其塑性将接近完全丧失。
二.细晶强化金属的晶粒越细,单位体积金属中晶界和亚晶界面积越大,金属的强度越高,这就是细晶强化,主要分为晶界强化和亚晶界强化两大类。
(1)晶界强化实验证明,金属的屈服强度与其晶粒尺寸之间有下列关系:o =o + K D一1/2此式称为霍耳-配奇公式(Hall-Petch公式)。
式中:O i——为常数,相当于单晶体的屈服强度;D——为多晶体中各晶粒的平均直径;K——为晶界对强度影响程度的常数,与晶界结构有关。
细晶强化

四、金属材料细晶强化工艺
(如何获得细晶)
1. 熔炼合金化细化 1.1微合金化 1.2 纳米弥散强化(粉末冶金法和合金内氧化法 ) 2.铸锭晶粒细化 2.1 电磁振荡 2.2 功率超声波 3. 连续铸轧工艺 4. 非晶晶化技术 5.半连铸及连铸技术
1.1微合金化机理
(1)微合金元素在金属熔炼中处于晶粒成长的前沿, 有助于加大前沿金属的过冷 度 ,提高一次成核率 ,增加均质成核数量 ,使金属晶粒细化。
增大材料晶粒尺寸的方法,增加金属材料在高温下的强度。
镍基高温合金,利用定向凝固来获得较大晶粒尺寸甚至单晶,减少晶界对 材料的不利影响,提高高温下的强度。 在熔模铸造型壳中建立特定方向的温度梯度,使熔融合金沿着与热流相反 的方向按照要求的结晶取向凝固的一种铸造工艺。
定向凝固设备由感应熔炼部分、 石墨电阻双区加热部分、冷却部分等 3 部分组成。定向凝固过程中首先对 型壳进行预热,待型壳达到预热温度 后进行合金浇铸,熔体保温静置 一定 时间后以 一定的抽拉速率进行定向凝 固。
强度提高
位错不易穿过晶界, 而是塞积在晶界处。
一、基本原理
2、金属屈服强度与晶粒大小关系 霍尔佩奇(H-P)关系式
1 2
( 的常 数
d为晶粒直径
多晶体的强度 和晶粒的直径呈 ( -1/2 ) 次 方 的 关 系,即晶粒越细强 度越高。
细化到1μ m , 屈服强度由 150~ 230MPa提高到 600~ 650 MPa, 并有望达到 800MPa。目前可供实行微合金化的元素主要有 Al 、Sc 、Ti 、V 、Y、Zr 、 Nb、Ce 、La 等 ,添加量为 0.1%~ 0.5%。
1.2 纳米弥散强化(粉末冶金法和合金内氧化法 )
二、纳米尺寸晶粒(晶粒尺寸在1~100nm间)
细晶强化的原理
细晶强化的原理
细晶强化是一种通过控制材料的晶粒尺寸和分布使材料性能得到提升的技术。
其原理是晶界对材料性能的影响。
晶界对应材料强度的影响有两个方面:首先,晶界是弹性势能积累的区域,当材料受到外部应力作用时,晶界处的贯穿性裂纹将停留在晶界上,防止裂纹扩展,从而增强了材料的韧性;其次,晶界会对材料中的位错运动产生阻碍作用,从而增加了材料的强度。
因此,通过控制晶粒尺寸和分布,可以增加晶界的数量,从而提高材料的强度和韧性。
此外,细晶强化还可以提高材料的塑性和耐腐蚀性能。
- 1 -。
(原文)细晶强化的机理及其应用
细晶强化的机理及其应用摘要:本文讲述了细晶强化的含义及其微观机理,介绍了三种推导Hall-Petch关系式的物理模型,并说明了微量碳在钢铁材料中细晶强化时对Hall-Petch关系式中σ0和k的影响。
本文还介绍了一种细晶强化金属材料的新方法-不对称挤压法。
关键词:细晶强化,Hall-Petch关系式,位错。
1 引言通常金属是由许多晶粒组成的多晶体,晶粒的大小可以用单位体积内晶粒的数目来表示,数目越多,晶粒越细。
实验表明,在常温下的细晶粒金属比粗晶粒金属有更高的强度、硬度、塑性和韧性。
这是因为细晶粒受到外力发生塑性变形可分散在更多的晶粒内进行,塑性变形较均匀,应力集中较小;此外,晶粒越细,晶界面积越大,晶界越曲折,越不利于裂纹的扩展。
故工业上将通过细化晶粒以提高材料强度的方法称为细晶强化。
细晶强化的关键在于晶界对位错滑移的阻滞效应。
位错在多晶体中运动时,由于晶界两侧晶粒的取向不同,加之这里杂质原子较多,也增大了晶界附近的滑移阻力,因而一侧晶粒中的滑移带不能直接进入第二个晶粒,而且要满足晶界上形变的协调性,需要多个滑移系统同时动作。
这同样导致位错不易穿过晶界,而是塞积在晶界处,引起了强度的增高。
可见,晶界面是位错运动的障碍,因而晶粒越细小,晶界越多,位错被阻滞的地方就越多,多晶体的强度就越高,已经有大量实验和理论的研究工作证实了这一点。
另外,位错在晶体中是三维分布的,位错网在滑移面上的线段可以成为位错源,在应力的作用下,此位错源不断放出位错,使晶体产生滑移。
位错在运动的过程中,首先必须克服附近位错网的阻碍,当位错移动到晶界时,又必须克服晶界的障碍,才能使变形由一个晶粒转移到另一个晶粒上,使材料产生屈服。
因此,材料的屈服强度取决于使位错源运动所需的力、位错网给予移动位错的阻力和晶界对位错的阻碍大小。
晶粒越细小,晶界就越多,障碍也就越大,需要加大外力才能使晶体产生滑移。
所以,晶粒越细小,材料的屈服强度就越大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
细晶强化的机理及其应用摘要:本文讲述了细晶强化的含义及其微观机理,介绍了三种推导Hall-Petch关系式的物理模型,并说明了微量碳在钢铁材料中细晶强化时对Hall-Petch关系式中σ0和k的影响。
本文还介绍了一种细晶强化金属材料的新方法-不对称挤压法。
关键词:细晶强化,Hall-Petch关系式,位错。
1 引言通常金属是由许多晶粒组成的多晶体,晶粒的大小可以用单位体积内晶粒的数目来表示,数目越多,晶粒越细。
实验表明,在常温下的细晶粒金属比粗晶粒金属有更高的强度、硬度、塑性和韧性。
这是因为细晶粒受到外力发生塑性变形可分散在更多的晶粒内进行,塑性变形较均匀,应力集中较小;此外,晶粒越细,晶界面积越大,晶界越曲折,越不利于裂纹的扩展。
故工业上将通过细化晶粒以提高材料强度的方法称为细晶强化。
细晶强化的关键在于晶界对位错滑移的阻滞效应。
位错在多晶体中运动时,由于晶界两侧晶粒的取向不同,加之这里杂质原子较多,也增大了晶界附近的滑移阻力,因而一侧晶粒中的滑移带不能直接进入第二个晶粒,而且要满足晶界上形变的协调性,需要多个滑移系统同时动作。
这同样导致位错不易穿过晶界,而是塞积在晶界处,引起了强度的增高。
可见,晶界面是位错运动的障碍,因而晶粒越细小,晶界越多,位错被阻滞的地方就越多,多晶体的强度就越高,已经有大量实验和理论的研究工作证实了这一点。
另外,位错在晶体中是三维分布的,位错网在滑移面上的线段可以成为位错源,在应力的作用下,此位错源不断放出位错,使晶体产生滑移。
位错在运动的过程中,首先必须克服附近位错网的阻碍,当位错移动到晶界时,又必须克服晶界的障碍,才能使变形由一个晶粒转移到另一个晶粒上,使材料产生屈服。
因此,材料的屈服强度取决于使位错源运动所需的力、位错网给予移动位错的阻力和晶界对位错的阻碍大小。
晶粒越细小,晶界就越多,障碍也就越大,需要加大外力才能使晶体产生滑移。
所以,晶粒越细小,材料的屈服强度就越大。
细化晶粒是众多材料强化方法中唯一可在提高强度的同时提高材料塑性、韧性的强化方法。
其提高塑性机制为:晶粒越细,在一定体积内的晶粒数目多,则在同样塑性变形量下,变形分散在更多的晶粒内进行,变形较均匀,且每个晶粒中塞积的位错少,因应力集中引起的开裂机会较少,有可能在断裂之前承受较大的变形量。
提高强度机制为:晶界增多,而晶界上的原子排列不规则,杂质和缺陷多,能量较高,阻碍位错的通过。
2 细晶强化的经典理论一般而言,细晶试样不但强度高,而且韧性也好。
所以细晶强化成为金属材料的一种重要强化方式,获得了广泛的应用。
在大量试验基础上,建立了晶粒大小与金属强度的定量关系的一般表达式为:σy=σ0+kd-n(1)式中,σy为流变应力,σ为晶格摩擦力,d为晶粒直径,k为与材料有关的参数,指数n0常取0.5。
这就是有名的Hall-Petch公式,是由Hall[1]和Peteh[2]两人最先在软钢中针对屈服强度建立起来的,并且后来被证明可广泛应用于各种体心立方、面心立方及六方结构金属和合金。
大量试验结果已证明,此关系式还可适用于整个流变范围直至断裂,仅常数σ0和k有所不同而己。
Hall-Petch公式是一个很好的经验公式,可以从不同的物理模型出发加以推导。
常见的模型有以下几种:2.1位错塞积模型[3]如图1 所示,外加切应力τ较小时,由于晶界的阻碍作用,会使晶粒1内由位错源S1放出的位错形成位错塞积,可在晶粒2内距其r远处产生较大的切应力,其值在r《d/2时可写为。
此处τ0为位错在晶内运动所受阻力,d为晶粒直径。
若设τ*为激活位于晶粒2中r处的位错源所需的临界切应力,则晶粒2的屈服条件可写为:(2)即(3)当d》r时,可将上式简化为:(4)由此可得:(5)若将拉伸屈服强度σy以mτy表示,则:(6)即(7)在(6)式中,m为一同有效滑移系数量有关的取向因子。
有效滑移系越多,m值越小。
在滑移系数量任意多时,取m=2;对有12个滑移系的立方晶体取m=3.1.图1位错塞积引起相邻晶粒中位错源开动示意图2.2 晶界“坎”模型[4]采用上述模型推导Hall-Petch公式的前提是承认在晶体中存在位错塞积。
然而,这一点至少对α-Fe来说尚有争议。
至今在α-Fe中,只在少数情况下才观察到晶界前的不规则的位错塞积群[5],而多数情况为不规则的位错缠结[6]。
为了克服这一困难,James Li[4]提出一种不需要位错塞积的模型。
他认为晶界上的“坎”可以当作位错的“施主”而放出位错,其机制示于图2。
由此可将流变应力视为位错运动克服林位错的阻力,并进而求得如下的Hall-Perch公式:(8)(8)式中,S为“坎”的密度(单位长度晶界上的“坎”的个数),α为与位错分布有关的实验待定常数(约为0.4)。
图2 晶界中的“坎”发射示意图2.3晶界区硬化模型[7]实际上,晶界“坎”模型是着眼于晶界发射位错而构成林位错加工硬化机制,若仅考虑晶界附近区域的次滑移和加工硬化效应,还可以对Hall-Petch公式作如下推导:设想在流变条件下,晶界的影响是在晶粒内造成一定宽度(d/2)的硬化区,如图3所示。
晶粒的强度σ要由晶界附近硬区强度σH和心部软区强度σS综合决定,即:(9)又因:(10)若略去b2,则将上式代入(9)式整理后得:(11)因式中σH、σS均为与材料有关的常数,故可改用下式表达:(12)因(12)式和(8)式的主要差别是指数不同,故对Hall-Petch公式的一般表达式为(1)。
指数n 可介于0.45与1.1之间,即0.45<n<1。
图3 晶界区硬化模型示意图可见Hall-Perch公式虽是一个可靠的经验公式,可从不同的物理模型加以推导,但确切的物理模型尚难于最后确定。
欲利用Hall-Petch公式得出屈服、流变或断裂的微观结论时,需要谨慎对待。
2.4 反常Hall-Petch关系[8]在传统的租晶材料中,其硬度和屈服应力随着晶粒尺d的降低而升高,即通常所说的Hall-Petch效应。
但在纳米晶粒材料中.这种效应可能会受到抑制甚至出现相反的变化趋势。
通常粗晶材料的塑性变形主要是通过位错的运动和相互作用完成的.而以上模拟表明纳米晶粒的变形主要是通过晶界滑移和位错运动其同主导的,随着构成材料的晶粒的尺寸逐渐减小,片变形机理从位错运动向基于晶粒边界滑移的方式转变。
而粗晶材料中晶粒边界通常是作为位错核的接收器,其阻止位错的运动,从而提高材料的硬度和屈服应力等。
而在纳米材料中,晶粒边界成为了位错成核和原干滑移的源头,从而起到促进塑性变形的作用。
这使得Hall-Petch效应随着晶粒尺寸的减小而失效甚至出现相反的变化趋势3.微量碳在细晶强化中的作用由上文可知k为与材料有关的因子关于k的物理涵义以及合金元素对k的影响,许多研究者曾经做了大量理论与实验研究[9]。
结果表明,k强烈地受间隙式溶质原子的影响,同时也受热处理条件影响。
但是,间隙式溶质原子和热处理条件影响k的原因尚不清楚。
本文以高纯铁为试料,在尽可能地将材料微观结构(晶内与晶界析出,晶界偏析等)同一化后系统地研和k的影响,讨论微量碳影响的机理。
究微量碳在固溶状态、析出状态和偏析在晶界对σ03、1实验材料及方法实验用Fe-50C和Fe-80C合金铸锭是以高纯电解铁(99.995%F e)为原料,采用高真空(6×10-3Pa)高频感应熔炼,经Fe-4.3%C中间合金脱氧后注人水冷铜铸型得到的,其化学成分见表1。
铸锭在高纯红气保护下加热后,经热锻、冷锻、冷轧和机加工得到宽15mm,厚6 mm板材。
为得到不含碳的高纯铁和碳浓度更低的试样,将Fe一80C合金板材在700℃流动湿氢和干氢气氛炉内退火不同时间,进行完全脱碳或降低碳量处理,所得试料的化学分析结果示于表1。
.四种试料的板材在700℃真空退火(5×10-2 Pa)后冷轧成厚1mm的薄板,机加工成平行部宽3 mm,长20mm的拉伸试样。
试样的热处理条件如表2所示,所有热处理均在5×10-2Pa真空炉内进行。
值得指出的是,与以往的研究不同,本文在调节晶粒尺寸热处理后对所有试样进行了微观结构同一化的最终热处理.。
表1试料的化学成分(质量分数×10-1)表2 热处理条件拉伸试验在室温下进行,初期应变速率为3.8×10-4s-1。
显微组织观察用试样取自拉伸试样的未变形部位,用微分千涉型光学显微镜观察并测定晶粒尺寸,按ASTM规定的方法计算平均晶粒直径。
3.2实验结果与讨论3.2.1固溶碳量对σ0和k的影晌高纯铁的拉伸试验结果表明,应力应变曲线上不出现明显的屈服点,因此取0.2%塑性变形时的流变应力为屈服强度Fe-C合金试样的应力应变曲线上出现显著的由于屈服造成的突然应力降低,取下屈服点为σ。
σy与d-1/2之间的关系见图4。
对所得结果进行最小二乘r法回归处理得到的直线关系表明,σy与d之间遵循Hall-Petch关系式.由直线关系可得高纯铁σ0=24MPa,k=7.5MPa·mm 1/2。
随固溶碳量增加σ0和k均增加,但是固溶碳量由50×10-6增加到80×10-6,k增加很小。
因此可以认为k的最大值为22 MPa·mm。
Handing[10]采用所谓的高纯铁(0.004% C, 0.003% Si,0.001%S, 0.002%P, 0.0012%O, 0.0005% N)研究了应变速率对细晶强化的影响,结果表明,应变速率在1×10-4-2.3×103s-1范围内变化对k没有明显影响。
图4 固溶碳量对σ0和k的影晌3.2.2 碳化物析出对σ0和k的影晌将Fe-80C合金在250℃时效5h,使大部分碳原子以渗碳体形式析出后得到的σy与d-1/2之间的关系如图2所示。
图中同时给出了高纯铁和碳完全固溶状态下Fe-80C合金的结果。
与碳完全固溶状态下的结果比较,使碳析出为碳化物,σ稍有降低,但k并不受影响。
0这一结果表明,k不直接受固溶碳量的影响,也不受碳化物析出的影响。
ﻩ图5 碳化物析出对σ0和k的影晌3.2.3碳在晶界偏析对k的影响在二元Fe-C合金中碳原子在晶界的偏析量受晶内固溶碳量和温度控制[10]。
固溶碳量一定时,降低热处理温度将增加碳在晶界的偏析量。
具有不同晶粒直径的Fe一5C合金分别在500℃保温20h和在700℃保温2h后得到的,σy与d -1/2之间的关系如图3所示。
考虑到5×10-6固溶碳造成的固溶强化很小,所以在假定σ0与高纯铁相同的条件下对结果进行了最小二乘法回归处理结果表明,随碳在晶界的偏析量增加k显著增加。
图6碳在晶界偏析对k的影响3.3 结论由上分析可知,Hall-petch关系式中的σ0项只受晶内固溶碳量和碳化物析出支配,这与基于位错理论的观点是一致的k项不直接受固溶碳量影响,而受碳在晶界的偏析量控制。