三轴龙门机械手
三轴机械手电气选型(PLC控制)要点

名称型号价格
PLC TM238LFDC24DT1816
750W伺服LXM23AU07M3X BCH08203898.4 400W伺服LXM23AU04M3X BCH060203413.6 400W伺服带抱闸LXM23AU04M3X BCH060204350接触器
LC1E0935 P NP接近开关国产30 P NP反光传感器国产200 I O点扩展模块800 3P 断路器20A
2P断路器16A
1P断路器4A
控制柜1500 24V开关电源MW150编码器电缆20/m 动力线电缆20/m 名称型号价格
PLC TM2181290 750W伺服LXM23AU07M3X BCH08203598 400W伺服LXM23AU04M3X BCH060203113 400W伺服带抱闸LXM23AU04M3X
BCH060204050接触器LC1E0935 P NP接近开关国产30 P NP反光传感器国产200 I O点扩展模块600控制柜1500 PTO定位模块扩展1000
15991
数量作用
1
1X轴
1Y轴
1Z轴
41,2输送链正反转
10原点,夹爪物料检测2输送链物料检测
1普通输入输出
总开
伺服
24V
1电柜
1
50
50
数量作用
1
1X轴
1Y轴
1Z轴
41,2输送链正反转
10原点,夹爪物料检测2输送链物料检测
1普通输入输出
1电柜
1控制伺服
CANOPEN控制方案普通脉冲控制方案。
机械毕业设计-龙门式机械手结构设计

关键词:机械手;工业;传动;强度
II
Abstract
Industrial manipulator is composed of target of modern mechanical body, control system, sensor system, control system and servo actuator system, operation, automatic control, a kind of imitation of human multiple programming, to complete the work of every kind of Mechatronics device in three-dimensional space. Industrial machinery hand to enhance and ensure the quality of products, improve production efficiency, plays a very important role in improving the working conditions of workers and the rapid updating of product. Industrial machinery hand technique combined with multi discipline knowledge. Including mechanism, computer, control theory, information and sensor technology, artificial intelligence, bionics and so on. It is the very active, very wide application areas. The manipulator has many human beings do not have, including the rapid analysis of environmental capacity; strong anti-interference ability, can work for a long time and high precision work. Can be said that the manipulator is a product of the progress of industry, it also plays a vital role in the modern industry. Nowadays, industrial robot has become the concern of the industry all over the world. This subject comes from the Yalong YL-221 automation to flexible production system, the machine independent innovation training system to simulate the actual industrial production system, according to the different stages of production machine is provided with a plurality of workstation: automatic access overhead warehouse, handling robot station, line conveyor, conveyor station station 90 degree turn, mechanical processing station, station, the station code heap. We design a robot will be used in Longmen, staff entry, disconnected to the conveyor belt parts are transported by mechanical hand, to the completion of the work of safety grip and release, and the parts from one end to the other end of the conveyor belt production line position specified on the conveyor belt. This paper expounds the development history of the manipulator, the application status at home and abroad, and its great superiority, puts forward the design requirements of the manipulator specific and detail structure design, overall design and various degrees of freedom. Key Words: robot; industrial; transmission; strength
三轴机械手系统使用手册
三轴机械手系统使用说明书系统由台达PLC(40EH)加步科7寸触摸屏组成,系统有2轴,3轴,4轴控制系统。
该系统运动指令只有直线功能,可实现机械手的各种点位控制。
以下是3轴系统的详细操作说明。
权限分3级,0级可以进入点动,自动页面,进行操作。
不需密码1级可以对应用程式进行编程,设定。
密码1234562级对设备的系统参数进行调试。
密码701011程式停止状态下,各运动轴自动完成搜索零点动作。
在系统设置中激活后才有效。
各轴的限位应安装完成。
在一些前提下,搜索零点方式并不是必须的,可使用人工确认零点的方式工作,系统具有断电位置记忆功能,在再次手动确认零点前,保持原零点位置有效。
长按3s,当前位置置为新的零点。
程式停止状态下,各轴快速返回零点位置。
零点可由搜索或手动确认。
设定点动时的移动速度。
设定快速返回零点时的移动速度。
设定搜索零点的移动速度。
x轴当前所处的位置。
y轴当前所处的位置。
Z轴当前所处的位置。
输出端口y10点动试动作按钮,其它相同。
指示相应输入x端口的状态。
点动运动轴时快速选择慢速移动。
x轴双向点动操作按钮y轴双向点动操作按钮z轴双向点动操作按钮进入手脉点动页面按钮,在系统设置中激活后才有效。
进入编写程式页面按钮进入自动操作页面按钮手脉操作选择手脉每一格对应的脉冲数被锁定,不能操作,只有手脉操作有效。
其它同前说明。
系统设定登录等级密码701011进入对刀示教界面。
示教方式有按钮操作示教,手脉示教两种。
进入示教点教导界面。
示教方式有按钮操作示教,手脉示教两种。
选择编写、查询的程式序号,主程0---4个,子程10—19个。
对程序行进行翻页操作。
指示当前的状态,人工可以在查询,编程两种状态切换。
查询中不能修改程式,只有进入编程状态,才可修改程式。
可编写的程序步。
按提示编写。
指令说明见后。
在当前行处直接插入一步。
删除当前步。
指令区,选择相应的指令。
在主程编写时,指令全可以使用,进入子程编写时,5类运动指令不能使用,只能编写动作程式。
三轴机械手的推力计算

三轴机械手的推力计算
三轴机械手的推力计算是指在机械手进行正向运动时所需施加的力的计算。
这个力的大小与机械手的质量、加速度、摩擦系数等因素有关。
首先,需要计算机械手在运动时的加速度。
这可以通过测量机械手的运动时间以及位移来计算出。
然后,需要根据机械手的质量和加速度计算出所需的推力。
这可以使用牛顿第二定律F=ma,其中F是推力,m是机械手的质量,a是机械手的加速度。
另外,还需要考虑机械手与其运动环境之间的摩擦力。
摩擦力的大小取决于机械手与环境接触面的材料和表面质量等因素。
为计算出摩擦力对推力的影响,可以使用摩擦系数。
摩擦系数是指在两个物体之间摩擦力与垂直于两物体接触面的力之比。
最后,根据机械手的运动轨迹和所需的推力,可以计算出每个轴所需施加的力的大小和方向。
这可以使用运动学和动力学等数学模型来计算。
综上所述,三轴机械手的推力计算需要考虑机械手的质量、加速度、摩擦系数以及运动轨迹等因素。
使用牛顿第二定律和摩擦系数等公式可以计算出所需的推力,并根据机械手的运动轨迹计算出每个轴所需施加的力的大小和方向。
三轴机械手流程图 Model (9)

PLC初始化完成 按下启动按钮SB1(I0.6)
X、Y、Z轴找零开始 100
找零完成 1.X轴移至-15000脉冲的绝对位置处 2.Y轴移至-15000脉冲的绝对位置处
X、Y轴移动到位 Z轴下移至27000脉冲的绝对位置处
Z轴下移到位 真空吸盘吸取物料,定时器 开始延时
定时器延时完成
X轴移至10000脉冲的绝对位置处 Y轴移至10000脉冲的绝对位置处
X、Y轴移动到位 Z轴下移至27000脉冲的绝对位置处
Z轴下移到位 真空吸盘吸取物料,定时器开始延时
定时器延时完成
Z轴上移至5000脉冲的绝对位置处 Z轴上移到位
1.X轴移至-25000脉冲的绝对位置处 2.Y轴移至-25000脉冲的绝对位置处
三轴机械手单元
巨林教仪
JL-SZJXS-01
1
1
三轴机械手单元流程图
Z轴上移至5000脉冲的绝对位置处 Z轴上移到位
1.X轴移至-35000脉冲的绝对位置处 2.Y轴移至-35000脉冲的绝对位置处
X、Y轴移动到位
Z轴下移至27000脉冲的绝对位置处
Z轴下移到位 10
真空吸盘释放物料,定时器开始延时 10
定时器延时完成
Z轴上移至5000脉冲的绝对位置处 Z轴上移到位
X、Y轴移动到位
Z轴下移至27 定时器延时完成
20
Z轴上移至5000脉冲的绝对位置处 20
Z轴上移到位
100
注:1.当按下停止按钮SB2(I0.7)时,报警红灯KA1(Q0.6)亮,报警绿灯灭 真空吸盘复位,各轴立即停止 。
2.当按下急停开关时,电路立即断电。 3.当按下启动按钮SB1(I0.6)时,报警绿灯KA2(Q0.7)亮,报警红灯灭
重型三轴牛头式机械手
很多人在看电视或者电影的时候都听说过或者见过机械手,机械臂之类的东西,但是机械手是个什么东西相信大家了解的还是比较粗糙的,认为机械手长的就跟人类的手一样。
其实并不是这样的,只有人形机器人的手是这样的。
而工业机械手完全不是这样的。
工业机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
主要由执行机构、驱动机构和控制系统三大部分组成。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
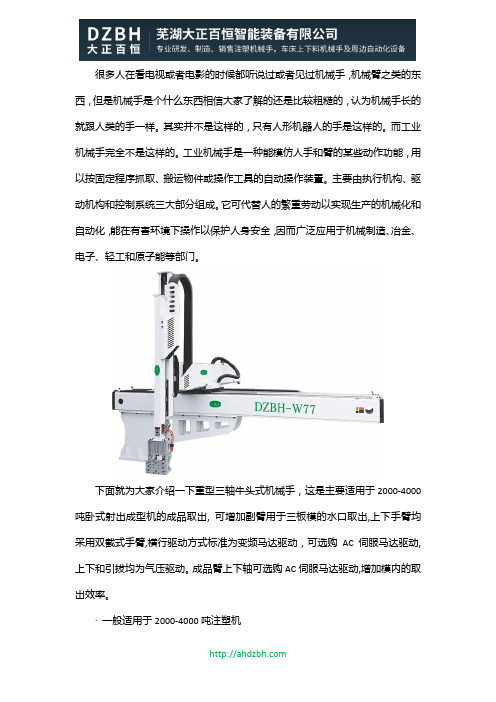
下面就为大家介绍一下重型三轴牛头式机械手,这是主要适用于2000-4000吨卧式射出成型机的成品取出, 可增加副臂用于三板模的水口取出,上下手臂均采用双截式手臂,横行驱动方式标准为变频马达驱动,可选购AC伺服马达驱动,上下和引拔均为气压驱动。
成品臂上下轴可选购AC伺服马达驱动,增加模内的取出效率。
·一般适用于2000-4000吨注塑机·采用新型嵌入式控制器·进口的气动元件,经久耐用·引拔臂及取物臂采用坚实的钢材,配合精密线性滑轨,刚性好、运行平稳、寿命长·横行和上下及引拔轴均采用AC伺服电机驱动,取出速度快,定位精准,调治具方便快捷,并可在模外设置不同的置放高度芜湖大正百恒智能装备有限公司是一家专业研发生产销售机械手的智能科技公司,其生产的各类机械手(双臂回斜式机械手、回斜式机械手、双截单臂回斜式机械手、立式注塑机专用机械手、单臂回斜式机械手、中型一轴伺服横走式机械手、中型两轴伺服横走式机械手、CNC悬挂式全伺服机械手、CNC开放式全伺服机械手、中型三轴牛头式伺服机械手、重型三轴牛头式机械手、重型三轴牛头式伺服机械手),类型丰富,控制精度高,性能优异,价格实惠,是您减省工人、提高效率、降低成本、提高产品品质、提升工厂形象的好选择。
芜湖大正百恒智能装备有限公司位于安徽省芜湖市,专业研发、制造、销售注塑机械手,车床、磨床、冲压上下料机械手及周边自动化设备。
三轴并联机械手工作范围
三轴并联机械手工作范围引言概述:三轴并联机械手是一种常见的工业机器人,其工作范围是指机械手能够覆盖的空间范围。
工作范围的大小直接影响机械手在生产线上的应用灵活性和效率。
本文将从五个大点来阐述三轴并联机械手的工作范围,包括机械手结构、关节限制、工作空间形状、末端执行器限制和运动范围的优化。
正文内容:1. 机械手结构1.1 三轴并联机械手通常由三个旋转关节组成,每个关节可以在一定范围内进行旋转运动。
1.2 机械手的结构决定了其工作范围的形状和大小,不同结构的机械手可能具有不同的工作范围。
2. 关节限制2.1 机械手的关节限制是指每个关节旋转的最大角度范围,这将直接影响机械手能够覆盖的空间范围。
2.2 关节限制的大小决定了机械手的工作范围的局限性,如果关节限制太小,机械手可能无法完成某些任务。
3. 工作空间形状3.1 机械手的工作空间形状是指机械手能够覆盖的空间的形状,通常为一个三维空间中的一个区域。
3.2 工作空间形状的大小和形状决定了机械手在生产线上能够操作的物体的大小和形状。
4. 末端执行器限制4.1 机械手的末端执行器是机械手用来进行物体抓取、放置等操作的部件,其大小和形状将直接影响机械手的工作范围。
4.2 末端执行器的限制包括其最大抓取范围、最大负载能力等,这些限制将决定机械手能够完成的任务类型和难度。
5. 运动范围的优化5.1 为了扩大机械手的工作范围,可以通过优化机械手的运动范围来实现。
5.2 运动范围的优化可以包括改变机械手的结构设计、增加关节的旋转范围、优化末端执行器的设计等。
总结:综上所述,三轴并联机械手的工作范围是通过机械手的结构、关节限制、工作空间形状、末端执行器限制和运动范围的优化来决定的。
了解和优化这些因素,可以提高机械手的工作范围,使其在生产线上具有更大的灵活性和效率。
三轴机械手控制系统设计
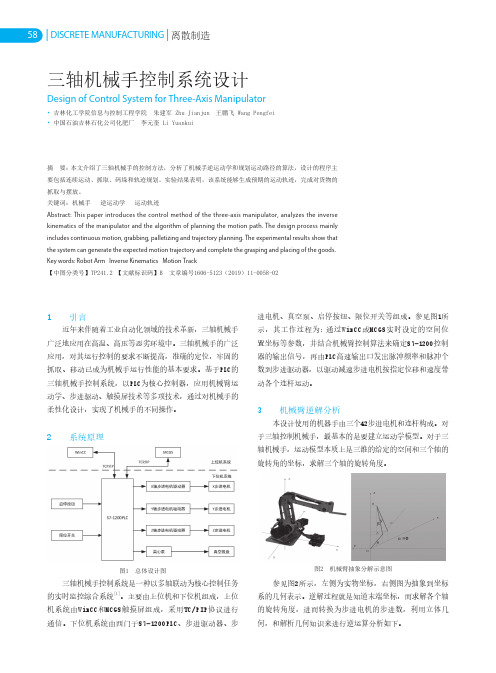
58│DISCRETE MANUFACTURING│离散制造三轴机械手控制系统设计Design of Control System for Three-Axis Manipulator• 吉林化工学院信息与控制工程学院 朱建军 Zhu Jianjun 王鹏飞 Wang Pengfei• 中国石油吉林石化公司化肥厂 李元奎 Li Yuankui摘 要:本文介绍了三轴机械手的控制方法,分析了机械手逆运动学和规划运动路径的算法,设计的程序主要包括连续运动、抓取、码垛和轨迹规划。
实验结果表明,该系统能够生成预期的运动轨迹,完成对货物的抓取与摆放。
关键词:机械手 逆运动学 运动轨迹Abstract: This paper introduces the control method of the three-axis manipulator, analyzes the inverse kinematics of the manipulator and the algorithm of planning the motion path. The design process mainly includes continuous motion, grabbing, palletizing and trajectory planning. The experimental results show that the system can generate the expected motion trajectory and complete the grasping and placing of the goods.Key words: Robot Arm Inverse Kinematics Motion Track【中图分类号】TP241.2 【文献标识码】B 文章编号1606-5123(2019)11-0058-021 引言近年来伴随着工业自动化领域的技术革新,三轴机械手广泛地应用在高温、高压等恶劣环境中。
三轴机械手安全操作及保养规程

三轴机械手安全操作及保养规程前言三轴机械手是一种广泛应用于机械设备生产制造领域的机械设备,它能够在制造生产过程中承担生产任务,从而提高制造生产效率。
与此同时,三轴机械手的操作需要注意安全问题,并且需要定期保养,以确保设备能够正常运行。
本文档将介绍三轴机械手的安全操作及保养规程。
一、安全操作规程1.了解三轴机械手操作的相关知识和规定:操作前应熟悉设备的操作手册,了解设备的功能及参数,以及使用注意事项等信息。
2.保持设备周围干净整洁:设备周围的环境应该保持干净,清洁设备及附件,防止堵塞孔洞和通风口。
3.严格遵守安全操作规程:三轴机械手仅限训练有素的人员操作,不得跨越运动轨迹。
千万不可达手穿过机器夹持器,也不可随便移动固定位置。
4.遵循设备的操作顺序:操作三轴机械手时应遵循设备的操作顺序,不得擅自更改流程。
5.确保设备各部件正常:进行操作前需检查设备各部件是否正常运转,如有故障应将机器停止运转并及时维修。
6.避免操作过度:严禁操作时过于集中注意力导致疏忽大意与设备手臂发生撞击等事故,应留出一定的余地以防万一。
7.严禁饮酒后操作:在饮酒等情况下禁止操作三轴机械手,以免因无法专注导致意外伤害。
二、保养规程1.定期检查设备:必须定期检查设备,为设备制定详细的检查程序,如果发现异常或故障必须停止机器并及时进行维修。
2.定期清洁设备:定期清洁并保持设备外观干净整洁,避免浸入水或渗入液体物质。
3.定期加油维护:设备应定期加油和检查润滑点,以确保设备长期维护运作正常。
4.进行设备保养:准备“检测与保养”的文件,包括了分类详细的工作内容与时间的制度,定期进行保养工作。
5.定期更换消耗品:三轴机械手中伺服电机的装配系统要经常检查和维护,如有异常要及时更换或修复。
三、结论三轴机械手的安全操作及保养规程对于设备的安全和长期稳定运转具有重要作用。
通过遵循安全操作规程和保养规程,不仅可以预防机器意外事故,并且可以延长机器的使用寿命,提高设备的使用效率。
三轴龙门机械手

摘要工业机器手由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
生产中应用机械手可以提高生产的自动化水平,可以减轻劳动强度、保证产品质量、实现安全生产机械手的结构形式比较简单,通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的引用。
本课题将设计一个三轴龙门机械手,需完成X、Y、Z三维空间内的移动要求,以及对工件的安全抓紧和释放,将仓库出库的工件搬运到生产线的输送带上。
关键词:机器人;效率;龙门;三轴AbstractIndustrial machine by hand CaoZuoJi (mechanical body),controller,servo drive system and detection sensor,which is a kind of copy operation,automatic control,can repeat programming in 3 d space,can finish all kinds of assignments electromechanical integration of the automatic production equipment. Particularly suitable for many varieties,change of flexible production batch. It to help stabilize,improve product quality,raise efficiency in production,improve working conditions and product rapid renewal plays a very important role. Production application manipulator can be used to increase production of automation level,can reduce labor intensity,ensure the quality of products,and realize safe production of the manipulator structure form began comparing simple,general manipulator can quickly change working procedures,good daptability,so it continues to transform the production of medium and small batch production of a wide range of references.Key Words: a manipulator,Efficiency; Simple; adaptability目录摘要 (I)Abstract (II)目录 (III)第1章绪论 (1)1.1 机器人概述 (1)1.2 机器人的历史、现状 (2)1.3 机器人发展趋势 (3)第2章机械手总体设计方案 (4)2.1机械手基本形式的选择 (4)2.1.1直角坐标系机器人 (4)2.1.2圆柱坐标系机器人 (4)2.1.3极坐标系机器人 (4)2.1.4多关节机器人 (5)2.2驱动装置的选择 (6)2.2.1液压驱动 (6)2.2.2气压驱动 (7)2.2.3电动机驱动 (7)第3章三轴机械手的总体方案设计 (8)3.1设计参数 (8)3.2方案设计 (8)3.2.1 X轴方案设计 (9)3.2.2 Y轴方案设计 ................................................................... 错误!未定义书签。
三轴机械手工作原理
三轴机械手工作原理嘿,朋友们!今天咱来唠唠三轴机械手的工作原理,这玩意儿可神奇啦!你看啊,这三轴机械手就像是一个特别能干的小助手。
它有三个轴,就好像人的胳膊能前后左右上下地活动一样。
想象一下,它的第一个轴就像是我们的肩膀,能让整个手臂大范围地移动,去抓取东西或者把东西放到指定的地方。
这个轴可重要了,没有它,机械手就没办法在那么大的空间里自由活动啦。
再说说第二个轴,就像我们的手肘,能让手臂弯曲或者伸直呀。
它能让机械手更灵活地去适应不同形状和位置的物品,是不是很厉害?还有第三个轴呢,就好比我们的手腕,能让手转动各种角度。
这样一来,不管物品是正着放还是歪着放,机械手都能准确地抓住它。
这三轴配合起来,那可真是天衣无缝呀!就好像一个熟练的工人,精准地完成各种任务。
比如说在生产线上,它可以快速地抓取零件,然后准确地放置到下一个工序的位置。
你说它像不像一个不知疲倦的小超人?一直在那里忙碌着,为我们的生产生活助力。
而且呀,它可比我们人类厉害多了,不会累,不会出错,一直兢兢业业地工作着。
那它是怎么做到这么厉害的呢?这就得靠那些聪明的工程师们啦!他们给机械手设计了各种程序和控制系统,让它知道什么时候该动,怎么动。
这就好像给它安上了一个聪明的大脑,指挥着它的每一个动作。
而且,这个大脑还能不断学习和改进呢,让机械手越来越厉害。
你说这三轴机械手是不是很神奇?它在我们的生活中发挥着越来越重要的作用。
从工厂的生产到日常生活的方方面面,都能看到它的身影。
它就像是我们的好伙伴,默默地为我们服务着。
虽然它不会说话,但它的每一个动作都在告诉我们:嘿,我能行!我能帮你们把事情做得更好!所以呀,让我们好好珍惜这个能干的小助手,让它为我们创造更多的价值吧!这就是三轴机械手,一个神奇而又实用的存在!原创不易,请尊重原创,谢谢!。
三轴机械手设计说明书

目录前言 (2)第一章绪论 (3)1.1 引言 (3)1.2 工业机械手的含义 (4)1.3 选题背景与意义 (4)1.4 工业机械手的组成 (6)1.5 工业机械手的发展及国内外发展趋势 (7)第二章三轴伺服驱动机械手结构设计方案 (12)2.1 机械手的设计方法 (12)2.1.1 机械手的选择与分析 (12)2.1.2 直角坐标机械手的设计方法 (13)2.2 机械手的结构设计 (18)2.2.1 机械手的总体设计 (18)2.2.2 机械手的传动部件设计 (19)2.2.3 机械手的臂部设计 (20)2.3 三轴伺服驱动机械手机构的特点 (21)第三章工业机械手的运动系统分析 (22)3.1 工业机械手的运动系统分析 (22)3.1.1机械手的运动概述 (22)3.1.2 机械手的驱动方式 (24)第四章三轴伺服驱动机械手零件的设计 (33)4.1 伺服电机的选择 (33)4.2 减速机的选择 ..................错误!未定义书签。
4.3 齿轮齿条的选择 (35)4.4 导轨的选择 (43)第五章结论 (45)致谢.............................错误!未定义书签。
参考文献.. (46)前言进入21世纪后,FANUC公司开发成功了配备有视觉传感器和力觉传感器的智能机械手。
到现在已拥有可搬运质量从 2 公斤到1.2 吨的种类丰富的商品系列。
随后,FANUC公司又开发了运用这一智能机械手的长时间连续机械加工系统机械手单元。
在整个加工工序中加工作业本身使用数控机床进行自动化加工已经非常普遍了。
但是,附带作业,毛比如在加工中心的夹具上进行加工材料装卸的作业,以及去毛刺边,清洗等作业中的很多部分,现在还是依靠人工来完成。
机械手单元使用智能机械手,不但实现了这些作业的自动化,而且在世界上最早实现了。
小时的长时间连续加工,现在在FANUC公司的工厂共运转着13 套这样的机械手单元。
采茶机器人的机械自动化控制系统设计分析

机具·包装
采茶机器人的机械自动化控制系统设计分析
辛文文 (青海省西宁市青海大学,青海 西宁 810016) 摘 要:通过对现有采茶机整体切割采摘茶叶的优化,根据茶树特征设计了龙门式三轴直角坐标机器人,三轴为滚珠丝杠结 构。同时根据茶叶外形设计了由舵机驱动的采摘爪手,茶叶抓取、切断同步进行。控制系统依据 TMS320F2812DSP 内核实现,由 C 语言编写软件,并置入 DSP 控制板内,满足串口通信与数据分析的伺服控制,确保了茶叶采摘的回收与品质。 关键词:采茶机器人;机械自动化;控制系统
反馈信息,通过两者比较利用控制算法形成控制信号,实现对控制对象
的控制。各种控制器都有一定的优缺点,综合其经济性、移动作业特征
等,选用功能强大的 32 位定点 DSP 控制器,具有密保保护机制、兼顾控 制及快算功能[2]。
继电器可实现控制器对大功率电磁阀的弱电控制,固态继电器由分
离电子期间、微电子电路等组成,在输入端施以控制信号,可实现对大电
四连杆机构闭合,由刀片辅以垫块实现茶叶切割[1]。 2 机器人控制系统分析
三自由机械手的结构设计
三自由度机械手的结构设计摘要本文简要介绍了机械手的概念,机械手的组成和分类,国内外的发展状况及发展前景。
本文对机械手进行总体方案设计,结合生产实际及理论确定了机械手的结构及动作过程,坐标型式和自由度数,并列出了机械手的技术参数。
设计出了机械手的驱动方案、控制方案,在进行控制方案的选取时进行了不同方案的优缺点的对比,最后确定了具体的控制方案。
在进行机械手控制器件的选取时,对控制器件选择进行了详细的分析,如对步进电机参数的具体选取。
最后介绍了利用可编程序控制器对机械手进行控制,同时叙述了可编程序控制器选取原则及工作过程,并绘制出了可编程序控制器外部接线图。
在用可编程序控制器控制时分为手动和自动两种工作方式,并绘制了自动工作方式的顺序功能图。
关键词机械手的概念,机械手控制器件,可编程序控制器(PLC)ThREE DEGREESOF FREEDOM MANIPULATORDESIGNABSTRACTThis paper introduces the concept of robot, robot the composition and classification of domestic and international developments and prospects.In this paper, an overall robot design, combined with production practice and theory to determine the structure of the manipulator and the action process, coordinate types and degrees of freedom, and lists the technical parameters of the manipulator.Designed a manipulator-driven program, control program, control program during the selection of different options when comparing the advantages and disadvantages, and finally determine the specific control program. Manipulator control device during the selection, the control device on a detailed analysis of options, such as the specific selection step motor parameters. Finally, the use of programmable logic controller tocontrol the manipulator, taking account of the pri nciples of PLC and process of selection, and draws out the external wiring diagram of PLC. Programmable Logic Controller in use when the work is divided into two kinds of manual and automatic mode, and the mapping of the automatic work order function map.KEYWORDS The concept of robot, robot control devices, programmable logic controller目录中文摘要 (1)英文摘要 (2)一、引言1.1简要介绍机械手的概念 (4)1.2机械手的组成和分类 (5)1.2.1机械手的组成 (5)1.2.2机械手的分类 (5)1.3国内外发展状况 (6)二、三轴自由度机械手的结构及动作过程 (7)2.1机械手的结构 (7)2.2机械手的动作过程 (8)2.3机械手的驱动方案设计 (9)2.4机械手的控制方案设计 (9)2.5机械手的座标型式与自由度 (10)2.6机械手的技术参数列表 (11)三、控制器件选型 (11)3.1步进电机及其驱动器选择 (11)3.2直流电机及其驱动器选择 (12)3.3旋转编码器的选择 (14)四、机械手的PLC控制设计 (15)5.1可编程序控制器的选择 (15)5.2可编程序控制器的工作过程 (16)总结 (19)致谢 (20)参考文献 (20)附录 (21)一、引言随着社会生产不断进步和人们生活节奏不断加快,人们对生产效率也不断提出新要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要工业机器手由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
生产中应用机械手可以提高生产的自动化水平,可以减轻劳动强度、保证产品质量、实现安全生产机械手的结构形式比较简单,通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的引用。
本课题将设计一个三轴龙门机械手,需完成X、Y、Z三维空间内的移动要求,以及对工件的安全抓紧和释放,将仓库出库的工件搬运到生产线的输送带上。
关键词:机器人;效率;龙门;三轴AbstractIndustrial machine by hand CaoZuoJi (mechanical body),controller,servo drive system and detection sensor,which is a kind of copy operation,automatic control,can repeat programming in 3 d space,can finish all kinds of assignments electromechanical integration of the automatic production equipment. Particularly suitable for many varieties,change of flexible production batch. It to help stabilize,improve product quality,raise efficiency in production,improve working conditions and product rapid renewal plays a very important role. Production application manipulator can be used to increase production of automation level,can reduce labor intensity,ensure the quality of products,and realize safe production of the manipulator structure form began comparing simple,general manipulator can quickly change working procedures,good daptability,so it continues to transform the production of medium and small batch production of a wide range of references.Key Words: a manipulator,Efficiency; Simple; adaptability目录摘要 (I)Abstract (II)目录 (III)第1章绪论 (1)1.1 机器人概述 (1)1.2 机器人的历史、现状 (2)1.3 机器人发展趋势 (3)第2章机械手总体设计方案 (4)2.1机械手基本形式的选择 (4)2.1.1直角坐标系机器人 (4)2.1.2圆柱坐标系机器人 (4)2.1.3极坐标系机器人 (4)2.1.4多关节机器人 (5)2.2驱动装置的选择 (6)2.2.1液压驱动 (6)2.2.2气压驱动 (7)2.2.3电动机驱动 (7)第3章三轴机械手的总体方案设计 (8)3.1设计参数 (8)3.2方案设计 (8)3.2.1 X轴方案设计 (9)3.2.2 Y轴方案设计 ................................................................... 错误!未定义书签。
3.2.3 Z轴方案设计.................................................................... 错误!未定义书签。
3.2.4 机械手爪方案设计 .......................................................... 错误!未定义书签。
第4章三轴龙门机械手结构设计 ...........................................................错误!未定义书签。
4.1 X轴设计 ...................................................................................... 错误!未定义书签。
F的计算................................................. 错误!未定义书签。
4.1.1 最大工作载荷m4.1.2 齿轮齿条结构设计计算 .................................................. 错误!未定义书签。
4.1.3 步进电机减速箱的选用 .................................................. 错误!未定义书签。
4.2 Y轴设计 ...................................................................................... 错误!未定义书签。
4.3 Z轴设计....................................................................................... 错误!未定义书签。
第5章机械手结构设计 ...........................................................................错误!未定义书签。
5.1夹持器设计的基本要求 .............................................................. 错误!未定义书签。
5.2 夹紧装置设计 ............................................................................. 错误!未定义书签。
5.2.1 夹紧力计算 ...................................................................... 错误!未定义书签。
5.2.2 驱动力计算 ...................................................................... 错误!未定义书签。
5.2.3 气缸驱动力计算 .............................................................. 错误!未定义书签。
5.2.4 选用夹持器气缸 .............................................................. 错误!未定义书签。
5.2.5 手爪的夹持误差及分析 .................................................. 错误!未定义书签。
5.2.6 材料及连接件选择 .......................................................... 错误!未定义书签。
结论 .............................................................................................................错误!未定义书签。
参考文献 .....................................................................................................错误!未定义书签。
致谢 ...........................................................................................................错误!未定义书签。
第1章绪论1.1 机器人概述在现代工业中,机械化和自动化的生产过程中已成为一个突出的主题。
生产过程的自动化化学连续性已基本得到解决。
但在机械行业,加工,装配等生产是不连续的。
专用机是一种有效的方式来大规模生产自动化,程控机床,数控机床,加工中心等自动化机械是有效地解决了多品种小批量的生产自动化的重要途径。
但在凿除本身,也有很多装卸,搬运,装配作业,有待于进一步实现机械化。
机器人的出现并得到应用,为这些作业的机械化奠定了良好的基础。
“工业机器人”(Industrial Robot):多数是指程序可变(编)的独立的自动抓取、搬运工件、操作工具的装置(国内称作工业机器人或通用机器人)。
机器人是一种机体功能,程序自动固定装置的上部。
机器人具有结构简单,成本低,易维护等优势,但功能较少,适应性差。
目前我国常把具有上述特点的机器人称为专用机器人,而把工业机械人称为通用机器人。
总之,机器人是用机器代替人手,将工件从所述位置指定的作业移到某个位置,或按照以操纵工件加工用的工作要求。
机器人拿起东西,最简单的是具有相似的基本条件,手段,抓住并移动手腕的机构,手臂,关节等部位- 执行机构,如肌肉的驱动臂运动- 传输;像指挥和控制大脑系统的手部动作。
这些系统的性能将决定机器人的性能。
一般而言,机器人通常就是由执行机构、驱动-传动系统和控制系统这三部分组成,如图1所示。
图1 机器人的一般组成1.2 机器人的历史、现状机器人首先是从美国开始研制的。
1958年美国联合控制公司研制出第一台机器人。
它的结构特点是机体上安装一回转长臂,端部装有电磁铁的工件抓放机构,控制系统是示教型的。
日本是工业机器人发展最快、应用最多的国家。
自1969年从美国引进两种典型机器人后,大力从事机器人的研究。