自动化立体仓库有轨巷道堆垛机
立体仓库巷道式堆垛机设计
立体仓库巷道式堆垛机设计摘要:随着经济的发展,有轨巷道堆垛机作为立体仓库的核心设备,应用越来越广泛。
我国物流业的蓬勃发展,对有轨巷道堆垛机的性能提出了更高的要求。
综合比较了几种升降方案后,升降装置采用钢丝绳卷筒式,其结构简单,受力明确,用户也比较熟悉。
安全防坠器、高度限位装置作为有轨巷道堆垛机的安全保护装置,当有轨巷道堆垛机遇到突发事故时它可以防止载货台坠落事故的发生,保证人员及货物的安全。
安全防坠器采用楔块式制动,灵敏度高、可靠性好、结构简单、能够有效地防止载货台坠落事故的发生。
货叉采用带有行程倍增机构的三级伸缩货叉,货叉收回时,其本身的长度远小于堆垛机运行巷道的宽度,货叉进行存取货物时,货叉的行程远远大于巷道的宽度。
关键词:有轨巷道堆垛机三级伸缩货叉安全防坠器毕业设计外文摘要Design of a railroad aisle stacking cranein stereoscopic warehouseAbstractWith the development of economic, railroad aisle stacking crane is the core equipment of stereoscopic warehouse, it has become more widespread in recent years.Higher demands are also asked for the performance and reliability of the railroad aisle stacking crane.After the synthesis has compared several kind of constructions elevators overall plan, uses the steel wire to hoist the type, its structure simple, the stress is clear about, the users also familiar. The security guards against falling,highly the spacing installment takes the construction elevator the safekeeping of security installment which can avoid the falling of the cage to assure the people and goods safety as soon as the construction hoist meets accident.The security guards which make use of wedge block for brake. This safety anti-falling device have high sensitivity,good reliability,simple configuration and easy to test,which can availably avoid the failing accident of the cage.The Fork trip with a double body is a three-tier telescopic fork, when fork is recovered, the length of its own is far less than the width of roadway, when accessing to goods, the fork is much longer than the width of roadway.Keywords:railroad aisle stacking crane three-tier telescopic fork security guards目次1 绪论 (1)1.1有巷轨道堆垛机的发展 (1)1.2有轨巷道堆垛机的类型 (1)1.3有轨巷道堆垛机的发展现状及特点 (3)2 有巷轨道堆垛机总体方案的确定 (5)2.1有轨巷道堆垛机功能分析 (5)2.2.立柱模块的设计 (7)2.3行走机构模块 (8)2.4起升机构模块 (9)2.5载货台模块 (9)2.6载货台断绳保护装置 (10)2.7货叉机构模块 (13)3 有轨巷道堆垛机基型产品设计 (14)3.1立柱模块设计 (14)3.2行走机构模块 (18)3.3起升装置的选择计算 (21)3.4货叉机构模块设计 (23)结论 (30)参考文献 (31)致谢 (33)1 绪论1.1有巷轨道堆垛机的发展有轨巷道堆垛机是随着立体仓库的出现而发展起来的专用起重机, 通常简称为堆垛机。
自动化立体仓库堆垛机的简介与操作方法
《装备维修技术》2021年第2期—331—自动化立体仓库堆垛机的简介与操作方法冯昭亮(兰州石化公司化工储运厂,甘肃 兰州 730060)引言:自动化立体仓库通常采用几层,十几层或几十层不同规格的货架来进行单元式的货物储存,同时还利用多种货物搬运设备,其中包括堆垛机,传送机等进行货物的搬运工作。
下面,本文将对其中最为重要的搬运设备,堆垛机,来进行细致的说明。
一、堆垛机简介有轨巷道堆垛机由金属结构,载货台,运行机构,起升机构,货叉机构,限速防坠装置,等部件组成。
(一)金属结构。
金属结构是堆垛机的主要承载构件之一,它由立柱,上横梁,下横梁三部分组成。
立柱是载货台垂直升降的支撑和限制部件,其两侧装有垂直导轨,以保证载货台平稳,灵活地升降。
上横梁由钢板焊接而成,它上部装有起升用的定滑轮和支撑堆垛机的上部导向轮组。
钢丝绳通过这些滑轮及载货台上的动滑轮,使载货台能上升或下降。
上横梁上还装有滑导线的集电装置。
下横梁由钢板焊接而成,是堆垛机的主要支撑部件。
下横梁上装有运行驱动车轮组,从动车轮组,下部水平轮组及夹轨器等装置。
还装有红外通讯,电气控制柜及运行限位开关组等电气装置[1]。
(二)载货台。
载货台是堆垛机承接货物并进行升降运动的部件,载货台由垂直框架和水平框架焊接成直角形结构件。
起升机构上出来的钢丝绳通过上横梁上的定滑轮,垂直框架上的动滑轮带动载货台沿起升轨道上下运动,完成运送货物任务。
载货台装有货叉机构,起升滑轮装置,导向轮组,升降位置检测组件,升降限位撞尺以及光电探测装置等。
(三)运行机构。
运行机构是堆垛机水平运动的驱动机构。
驱动单元采用德国SEW 公司的齿轮电机减速机。
运行机构采用变频闭环调速,高速可达120m/min,低速可达2m/min 以下,保证了生产效率和停准精度两方面的要求。
(四)起升结构。
起升机构由SEW 电机减速机,卷筒及钢丝绳等组成。
起升机构安装在立柱上,是堆垛机载货台进行升降运动的驱动部件,用钢丝绳联接定滑轮与载货台上的动滑轮以驱动载货台升降。
自动化立体仓库中巷道堆垛机PLC的控制特点及编程
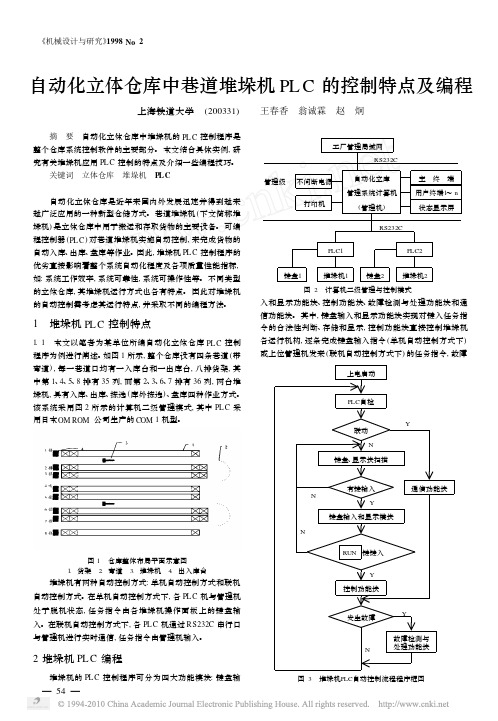
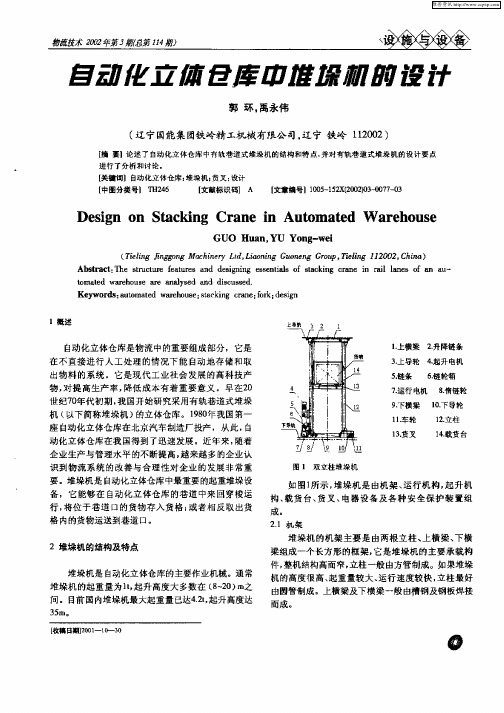
0 0 0 0 O O O O 排列 层 图 5 堆垛机实时地址显示 e. 若出现故障, 则显示故障代码及故 障语句。 如图 6
E3 3 OOOO
Y RUN 键键入
N
数字键 N
Y
功能键 N
Y
显示该键值
F键 Y
F键 功能块
↑↓键 Y
↑↓键 功能块
D el键 Y
子程序SBN 000 图 8 控制功能块程序框图
— 55 —
《机械设计与研究》1998 No. 2
SBN 000 (h30, h31, h32) (h33, h34, h35)
表 1 四种作业方式地址传送路径表
入库
出库
拣选
CN TR 1Φ # 0036 时 (# 0001, # 0000, # 0001)
软件中, 管理机与各 PL C 采用如下的通信格式及约定。 整个通信功能块的程序框图如图 10。
表 2 PLC—管理机数据通信格式及约定
byte
发送块
byte
接收快
0 通信控制字
0
1
1
2 任务序号字
2
3
3
4 返回控制信息 (无任务代 4
5 码, 执行任务代码, 故障代 5
码, 任务完成代码)
6
6
199802020图7键盘输入和显示功能块程序框图enter键功能块enter键del键功能块del键键键功能块f键功能块f键功能键显示该键值数字键run键键入键盘显示块扫描yynnnyyyyy图8控制功能块程序框图子程序sbn000入库地址处理出库地址处理拣选地址处理盘库地址处理入库出库拣选盘库判断操作方式清除该任务取下一条指令任务全部完成nynynynyny检测与处理功能块实现对系统故障的实时检测并处理通信功能块用于管理各堆垛机与管理机的实时通讯包括各种通讯包如
自动化立体仓库出入库能力及堆垛机节拍
自动化立体仓库普通都采用托盘式货架, 平托盘作为装载工具在搬运、 保管、 运输和包 装的各个环节中都处于中心位置, 直接影响着仓库的规划和储存效率。
托盘标准化是物流标 准化的基础,是物流系统协调化的关键,是实现搬运机械、包装/运输作业通用化、统一性 的前提。
目前欧洲托盘的标准为1200 × 800mm ,是基于通用卡车运输的尺寸优化;美国托盘的标 准尺寸为1200 × 1000mm ,及所谓的工业托盘,工业应用中时常采用; 日本托盘的标准尺寸为 1100 × 1100mm ,是基于集装箱的尺寸优化。
中国托盘规格较为混乱,但随着物流业机械化和自动化的要求,标准规格也逐渐确定,标 准规格尺寸如表 1 所示,表中●表示常用托盘尺寸。
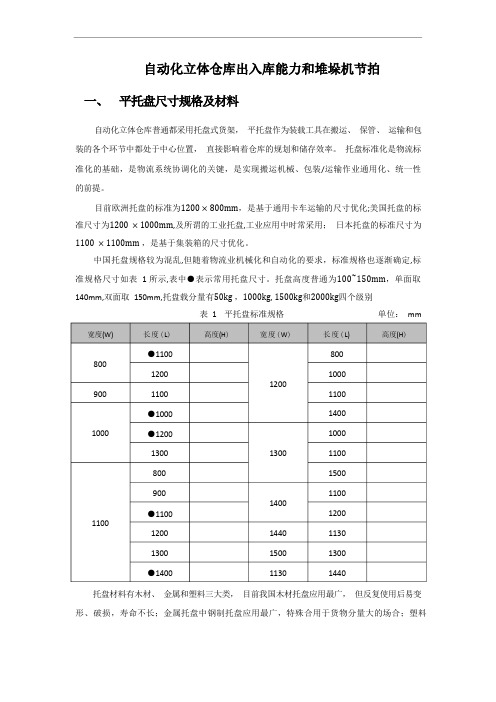
托盘高度普通为100~150mm ,单面取 140mm,双面取 150mm,托盘载分量有50kg ,1000kg , 1500kg 和2000kg 四个级别表 1 平托盘标准规格 单位: mm托盘材料有木材、 金属和塑料三大类, 目前我国木材托盘应用最广, 但反复使用后易变 形、破损,寿命不长;金属托盘中钢制托盘应用最广,特殊合用于货物分量大的场合;塑料宽度(W )120013001400144015001130长度(L )●110012001100●1000●12001300800900●110012001300●1400 长度(L)80010001100140010001100 150011001200113013001440宽度(W)80090010001100高度(H ) 高度(H )托盘因其质轻、美观、强度高、耐腐蚀、可回收等优点广泛应用于食品、医药、汽车、烟草、化工等领域.三种托盘只是材料不同,主要标准规格尺寸都相同.把包装的物品堆积在托盘上便成为装载单元,装载单元的货态是自动化立体仓库货格所能储存货物的最大尺寸,货态尺寸的计算是通过包装箱或者包装袋的规定尺寸及选取的码垛方式,或者由储存货物的外形尺寸计算得出(包括托盘尺寸) ,如图 4 所示。
自动化立体仓库堆垛机的设计
自动化立体仓库堆垛机的设计引言概述:自动化立体仓库堆垛机是现代仓储物流系统中的重要设备,其设计直接影响到仓库的运作效率和成本控制。
本文将从设计原理、结构特点、控制系统、安全性和可靠性等方面进行详细阐述,旨在帮助读者更全面地了解自动化立体仓库堆垛机的设计。
一、设计原理1.1 堆垛机的运行原理自动化立体仓库堆垛机通过电动机驱动,沿着固定的轨道上下移动,将货物从入库口运送至指定的货架位置。
同时,堆垛机配备有夹具或夹爪,可以将货物从货架上取下或放置上去。
1.2 堆垛机的升降原理堆垛机的升降机构通常采用液压系统或螺杆传动系统,通过控制液压缸或螺杆的运动来实现货物的升降。
液压系统具有升降速度快、负载能力大的优点,螺杆传动系统则具有精度高、稳定性好的特点。
1.3 堆垛机的定位原理堆垛机的定位通常采用编码器或激光传感器进行反馈控制,确保堆垛机能够准确停靠在指定的货架位置上。
编码器能够实现位置的精确控制,激光传感器则能够实现非接触式的测距。
二、结构特点2.1 主体结构自动化立体仓库堆垛机的主体结构通常由立柱、横梁、升降机构、夹具等部件组成。
立柱和横梁通常采用钢结构,具有承载能力强、稳定性好的特点。
2.2 控制系统堆垛机的控制系统通常由PLC控制器、人机界面、传感器等组成,实现对堆垛机的运行、升降、定位等功能的控制。
控制系统具有智能化、自动化的特点,能够提高堆垛机的运行效率和精度。
2.3 安全防护为了确保堆垛机的安全运行,通常在堆垛机的周围设置安全防护装置,如光栅、安全门、急停按钮等。
这些安全防护装置能够及时发现异常情况并采取相应的措施,保障操作人员和设备的安全。
三、控制系统3.1 PLC控制器PLC控制器是堆垛机的核心控制设备,负责对堆垛机的各项功能进行控制和调度。
PLC控制器具有稳定性好、可编程性强的特点,能够实现多种功能的自动化控制。
3.2 人机界面人机界面通常采用液晶显示屏或触摸屏,用于显示堆垛机的运行状态、报警信息等,并提供操作界面供操作人员进行参数设置和监控。
自动化立体仓库堆垛机常见故障与维修探讨
自动化立体仓库堆垛机常见故障与维修探讨摘要:新时期,我国自动化技术得到快速的发展,进而衍生了自动化立体仓库,其是自动化技术发展的重要产物。
若自动化立体仓库在实际的使用过程中出现故障,会使得仓库内的物资无法快速取出,因此,该问题应引起维修人员的重视。
堆垛机是自动化立体仓库中的主要设备,其在实际运行过程中难免会出现一定的故障,处理堆垛机的故障成为重要问题。
对此,本文就自动化立体仓库堆垛机常见故障与维修展开相应的分析与研究。
关键词:自动化;立体仓库;堆垛机;故障;维修新时期,为提高工作效率,普通的仓库已然无法满足企业发展的实际要求,而自动化立体仓库则成为必然选择。
自动化仓库主要是利用仓库的实际面积与储存空间,可让货物储存变得更加集体化、立体化。
此种仓库的出现,可以大大减少占地面积,能减少仓库的占用费用,能大大提高物流运作效率,进而推动了自动化立体仓库的进一步发展。
堆垛机是自动化立体仓库运行必不可少的起重机械,其是自动化立体仓库的主要设备,其肩负着进库、出库与盘库等多项任务,其在实际运行过程中会引发多种问题。
以下我们先就堆垛机的运行、结构与设计进行具体的分析。
一、堆垛机的运行、结构与设计1、运行方式巷道式堆垛机主要是按照相应的运行方式进行分类,主要划分为有轨与无轨巷道式两种[1]。
无轨巷道式堆垛机是用于作业次数不是很频繁、高度不大、强度不高的仓库,其主要适用于一般仓库通过改造而成的中低层仓库。
而有轨巷道式堆垛机则与无轨巷道式堆垛机的结构有所不同。
有轨巷道式堆垛机主要是借助钢轮在相应的轨道上运行,会沿着巷道中已然设计完成的地轨进行平稳运行,且作业高度取决于仓库的高度[2]。
2、结构巷道式堆垛机主要是按照结构进行分类,其主要划分为双立柱型与单立柱型两类。
单立柱型堆垛机的结构比较简单,主要是由1根立柱、下横梁与上横梁所组成的,也可仅由1根立柱与下横梁而组成的。
通常来讲,单立柱型堆垛机主要应用到作业高度较低(≤16.0m)、起重量较小(≤2t)的仓库[3]。
自动化立体仓库堆垛机毕业设计

本科毕业设计(论文)自动化立体仓库堆垛机设计DESIGN OF STACKER CRANE FOR AUTOMATIC WAREHOUSE20013年6月摘要有轨式巷道堆剁起重机是随着立体仓库的出现而发展起来的专用起重机,通常简称为堆剁机。
堆剁机是立体仓库中最重要的起重运输设备,是代表立体仓库特征的标志。
其主要用途是在高层货架仓库的巷道内沿轨道运行,将位于巷道口的货物存入货格,或是取出货格内的货物运送到巷道口,完成出入库作业。
20世纪70年代初期,我国开始研究采用巷道式堆剁机的立体仓库,不久便广泛应用于各行业和地区,有的已经形成系列化,据不完全统计,到目前已建成三百余座。
随着现代工业生产的发展,有轨巷道堆垛起重机的技术也在不断提高和完善。
世界主要工业国家都把着眼点放在开发性能可靠的新产品和采用高新技术上,更加注重实用性和安全性。
如今,自动化立体仓库及堆垛机已成为企业生产管理不可获缺的重要组成部分。
本文从实际问题出发,以现有设备为依托,先确定出堆垛机的总体结构及各部分的结构草图,然后运用理论力学、材料力学、机械设计、制造技术等专业知识,并查阅相关设计手册,对其机械部分进行了详细的设计计算,包括:机架、行走机构、提升机构、载货台和货叉伸缩机构。
设计过程中,以实现堆垛机的机械性能为目的,在满足其强度、刚度、运行稳定性等要求的前提下,综合考虑结构的合理性和所选材料的经济性,力求达到高质量、低成本。
关键词自动化立体仓库堆垛机结构设计AbstractTrack Tunnel-Stacker Crane is developed by a special crane with the emergence of three-dimensional warehouse, usually referred to as stacker crane. Stacker crane is the most important lifting and transportation equipment in a three-dimensional warehouse, and is one characteristic of three-dimensional warehouse. Its main use is orbit along the roadway in tunnel of high-rise warehouse, put the goods that be located at the mouth of the tunnel into the shelves, or take out goods and delivered to the tunnel mouth, complete the storage operations.At the early 70’s of 20th, China started to develop the three-dimensional warehouse with stacker crane, and soon have be widely used in various industries and regions,some have formed serialization. According to incomplete statistics, more than 300 warehouses have been completed now. With the development of modern industry, the technology of stacker crane is being improved. All the world's major industrial countries focus on the development of new products with reliable performance and the use of high-tech,and pay more attention to the practicality and safety. At present, automatic three-dimensional warehouse and stacker crane have become an important component of production management.This paper starts from the practical problems, and bases on existing equipments. Firstly confirm the overall structure of stacker crane and the draft of parts of the structure. Then use Theoretical Mechanics, Material Mechanics, Machine Design and Manufacturing Technology, and according to relevant design manuals, elaborates on its machinery parts, including: Rack, Running Mechanism,Lifting Mechanism,Loading Stations and Telescopic Fork Mechanism. In the design process, considering the rationality of structure and the economy of the selected materials in order to achieve the mechanical properties of stacker and request of strength, stiffness, running stability, attempt to reach the aim of high-quality, low-cost.Keywords Automatic Three-Dimensional Warehouse Stacker Crane Design of Structure目录第一章绪论 (1)1.1自动化立体仓库概述 (1)1.2自动化立体仓库的发展 (1)1.3发展自动化立体仓库的必要性 (2)1.4自动化立体仓库中的堆垛起重机 (4)1.5巷道式堆垛起重机的结构及设计要点 (5)1.5.1 机架 (5)1.5.2行走机构 (5)1.5.3提升机构 (5)1.5.4载货台及货叉 (5)1.5.5电器设备 (6)1.5.6安全保护装置 (6)第二章堆垛机机架的结构设计 (7)2.1 自动化立体仓库的结构尺寸及运行条件 (7)2.2 机架设计概述 (7)2.2.1机架设计应满足的一般要求 (7)2.2.2 机架的设计步骤 (7)2.3 上导轨设计 (9)2.3.1 导轨类型的确定 (9)2.3.2 导轨材料的确定 (9)2.3.3导轨截面形状的确定 (9)2.4 上横梁设计 (11)2.5 立柱设计 (14)2.6 下导轨设计 (19)2.6.1导轨类型的选择 (19)2.6.2滚动直线导轨副的结构与特点 (19)2.6.3 滚动直线导轨副的计算 (20)第三章行走机构的设计 (25)3.1 电动机的选择 (25)3.1.1选择电动机应综合考虑的问题 (25)3.1.2电动机的选择 (25)3.2 传动装置的设计 (26)3.2.1 传动方案的确定 (26)3.2.2 第一级减速齿轮副的计算 (28)3.2.3 第二级减速齿轮副的计算 (32)3.2.4 齿轮齿条副几何尺寸的确定及计算 (36)3.2.5 轴的计算 (37)3.3 行走机构结构图 (42)第四章提升机构的设计 (43)4.1 电动机的选择 (43)4.2 传动滚子链的设计计算 (43)4.2.1滚子链几何尺寸的计算 (43)4.2.2 滚子链静强度计算 (44)4.2.3 链轮几何尺寸计算 (45)4.3提升滚子链的设计计算 (47)4.3.1滚子链几何尺寸的计算 (47)4.3.2链轮几何尺寸的计算 (48)第五章载货台与货叉伸缩机构的设计 (49)5.1 电动机的选择 (49)5.2 传动机构的计算 (50)5.2.1 圆锥齿轮副的计算 (50)5.2.2 齿轮齿条副的计算 (53)5.2.3 传动轴的设计 (57)5.3导轨与叉板的设计 (59)5.3.1导轨的计算 (59)5.3.2 板件尺寸的确定 (60)5.4载货台结构图 (61)结论 (63)致谢 (65)参考文献 (66)附录Ⅰ毕业实习报告................................. 错误!未定义书签。
自动化立体仓库中堆垛机的设计
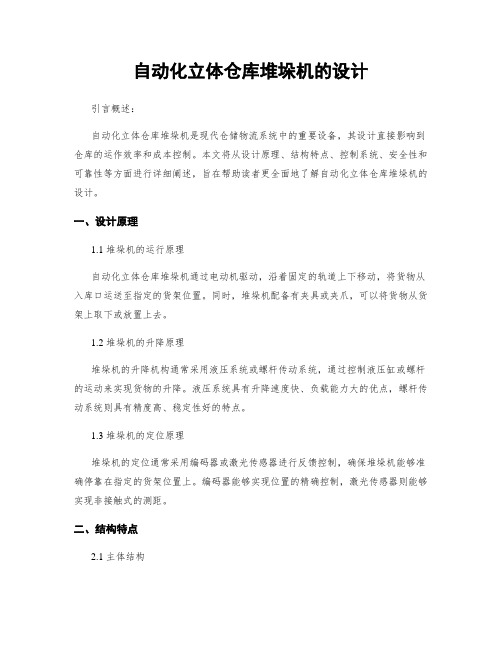
7运行 电机 8惰链轮 . . 9下横粱 l. . 0下导轮 1. 1 车轮 1. 3货叉 1. 2立柱 1. 4载货 台
企业生产与管理水平 的不断提高, 越来越多的企业认 识 到物 流 系 统 的 改 善与 合 理 性 对 企业 的 发展 非 常 重
要 。堆 垛机 是 自动化 立体仓 库 中最重 要 的起 重堆垛 设 备 ,它 能够 在 自动 化立 体仓 库 的巷 道 中来 回 穿梭 运 行 , 位 于巷 道 口的货物 存 入货 格 : 者 相 反 取 出货 将 或 格 内的货物 运送 到巷道 口。
而成 。
O
维普资讯
L 6T 5 E HNOL OG t TC C OGY e , O 2s d lt 14 N 32 O ie a 1J  ̄
堆垛 机 的机 架沿 天 轨 运行 ,为防 止框 架倾 倒 , 在
ห้องสมุดไป่ตู้
上横粱上装有导向轮 。 天轨一般由角钢 、 糟钢或热轧H 型 钢制 成 。
6 轮箱 . 链
物, 对提 高生产率 , 降低成本有着重要意义 。早在2 0 世纪7 年代初期, 0 我国开始研究采用有轨巷道式堆垛
机( 以下 简称 堆 垛 机 )的立 体仓 库 。 18 年 我 国第一 90 座 自动 化立 体 仓 库在 北 京汽 车制 造厂 投产 ,从 此 , 自 动化 立 体 仓库 在我 国得 到 了迅速 发展 。近年 来 , 随着
维普资讯
镑谎技术 20 02年第3期( 14期) 总第 1
鲁 袖 化 立 德 e 库 巾 惟 垛 弧 呐 没 计
郭 环. 禹永伟 ( 辽宁 国能集 团铁岭精工机械有限公 司, 辽宁 铁岭 l20 ) 10 2
【 要l论述 了自动化立体仓库 中有轨 巷道 式堆垛机的结构和特 点, 摘 井对 有轨巷 道式堆垛机 的设计 要点 进行了分析和讨论 。 【 关键词l自动化立体仓库: 堆垛机; 货叉 ; 设计
自动化立体仓库出入库能力及堆垛机节拍

二、货态尺寸计算及码垛方式把包装的物品堆积在托盘上便成为装载单元,装载单元的货态是自动化立体仓库货格所能储存货物的最大尺寸,货态尺寸的计算是通过包装箱或者包装袋的规定尺寸及选取的码垛方式,或由储存货物的外形尺寸计算得出(包括托盘尺寸),如图4所示。
图4 货态尺寸计算示意图装载托盘上的货物总尺寸一般与托盘尺寸相同,或者比托盘略小一些,非常特殊时也可以比托盘略大。
常用装载的方式有:完全紧密型、中空型、周空型、不规则型,装载形式如图5所示,装载方法的优劣在于托盘空间利用率、物品安全可靠、破损最少,其中破损最少是最重要因素。
图5 托盘装载图码垛针对箱装或者袋装的物品,根据包装、尺寸、重量及数量,将货物按一定规律码成各种形状的货垛。
基本要求是:合理、牢固、定量、整齐、节约、方便。
码垛方法包括:对缝堆积法、交错堆积法、砌砖堆积法、中空堆积法和外分堆积法。
a 对缝堆积法;b 交错堆积法;c 砌砖堆积法d 中空堆积法;e 外分堆积法图6 码垛方法示意图三、单元货格尺寸确定货格是仓库货架内储存货物的单位空间,每个货格可有一个或者多个货位,货物单元尺寸确定好之后,就可确定货格尺寸,货格尺寸取决于货物单元四周留有的间隙和货架构件有关尺寸,在立体仓库设计中,恰当的确定货格尺寸是一项很重要的设计项目,直接影响仓库面积及空间利用率,也关系到存取工作的顺利进行。
下面图7就最常见的横梁式货架与牛腿式货架介绍单元货格尺寸的确定,各间隙的符号及名称见表2a)横梁式单货位货架载货示意图c)牛腿式货架载货示意图图7 货架载货示意图几周误差的累积:起升机构的停准误差、货叉微升降的定位误差、货物高度误差、任址误差、货架托梁(或横梁)的高度误差。
第三,要考虑货叉伸出时在货物作用下的下挠量。
最后,再加一个安全裕度。
货格高度主要取决于单元货物上部垂直间隙和下部垂直间隙的尺寸,上部间隙应保证货叉叉取货物过程中微起升时不与上部构件h2发生干涉,一般;下部间隙应保证h2≥(货叉上浮行程+各种误差)h4货叉能自由进出货架货位存取货物,一般h4≥(货叉厚度+。
自动化立体仓库中堆垛机的常见故障及维修对策分析
自动化立体仓库中堆垛机的常见故障及维修对策分析自动化立体仓库是现代化的智能货物存储设备,是通过计算机控制的自动化系统,将货物储存于仓库内,提高货物存储密度、提高存储效率。
堆垛机是自动化立体仓库的核心设备之一,常见的故障有:设备故障、执行机构故障、传感器故障、电子元件故障等。
下面就这些故障的维修对策进行分析。
1.设备故障设备故障是导致立体仓库堆垛机运行异常的原因之一,主要表现为机器无法正常启动,例如,堆垛机的蓄电池电量不足、各个控制手柄及按钮接触不良、或电路板损坏等。
处理方法如下:(1)检查蓄电池电量是否充足,并随时保持充电。
(2)检查各个控制手柄及按钮运转状态,确保所有接触良好。
(3)检查电路板是否损坏,并及时更换。
2.执行机构故障执行机构故障是指设备无法完成各项任务,例如,机器无法移动、托盘升降或提升机械臂有异响等。
解决方法如下:(1)检查马达、行走马达、减速器、链条等执行机构是否存在故障,并及时进行维修或更换。
(2)检查滑轮和导轨的单向轴是否有劣化现象,并及时更换。
3.传感器故障传感器故障是指设备的传感器损坏或失控,例如,电动起重机的重量传感器失灵、光电开关或接近传感器无反应等。
解决方法如下:(1)检查传感器是否正常运作。
(2)清洁传感器,确保其有效运转。
(3)更换或维修传感器,并重新校准。
4.电子元件故障电子元件故障指该设备的电子元件损坏或损坏,例如,PLC 的电源板损坏;伺服电机控制器损坏等。
维修对策如下:(1)检查电源板或伺服电机控制器等电子元件是否正常。
(2)检查是否有电线接触不良或插头松动现象。
(3)更换损坏的电子元件或进行修理。
结论在日常运营中,自动化立体仓库中的堆垛机将长时间持续工作,因此出现故障的可能性较高。
如上所述,对于设备、执行机构、传感器和电子元件等故障的产生,及时维修、保养和更换是必要的,以确保自动化立体仓库的稳定运行和延长设备寿命。
巷道堆垛机的安全保护装置
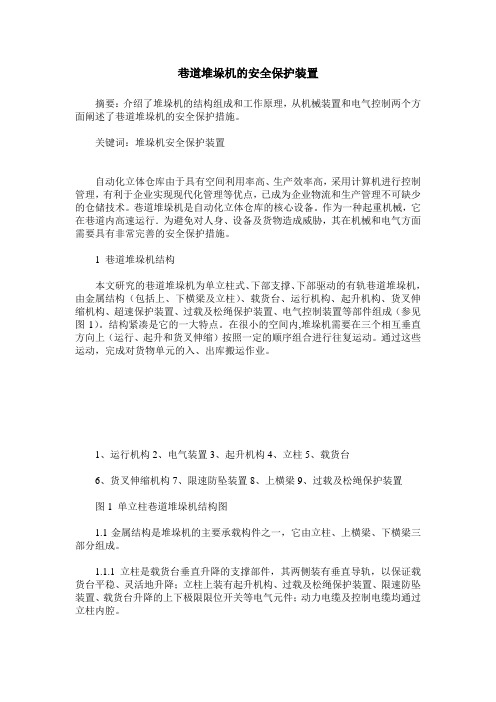
巷道堆垛机的安全保护装置摘要:介绍了堆垛机的结构组成和工作原理,从机械装置和电气控制两个方面阐述了巷道堆垛机的安全保护措施。
关键词:堆垛机安全保护装置自动化立体仓库由于具有空间利用率高、生产效率高,采用计算机进行控制管理,有利于企业实现现代化管理等优点,已成为企业物流和生产管理不可缺少的仓储技术。
巷道堆垛机是自动化立体仓库的核心设备。
作为一种起重机械,它在巷道内高速运行.为避免对人身、设备及货物造成威胁,其在机械和电气方面需要具有非常完善的安全保护措施。
1 巷道堆垛机结构本文研究的巷道堆垛机为单立柱式、下部支撑、下部驱动的有轨巷道堆垛机,由金属结构(包括上、下横梁及立柱)、载货台、运行机构、起升机构、货叉伸缩机构、超速保护装置、过载及松绳保护装置、电气控制装置等部件组成(参见图1)。
结构紧凑是它的一大特点。
在很小的空间内,堆垛机需要在三个相互垂直方向上(运行、起升和货叉伸缩)按照一定的顺序组合进行往复运动。
通过这些运动,完成对货物单元的入、出库搬运作业。
1、运行机构2、电气装置3、起升机构4、立柱5、载货台6、货叉伸缩机构7、限速防坠装置8、上横梁9、过载及松绳保护装置图1 单立柱巷道堆垛机结构图1.1金属结构是堆垛机的主要承载构件之一,它由立柱、上横梁、下横梁三部分组成。
1.1.1立柱是载货台垂直升降的支撑部件,其两侧装有垂直导轨,以保证载货台平稳、灵活地升降;立柱上装有起升机构、过载及松绳保护装置、限速防坠装置、载货台升降的上下极限限位开关等电气元件;动力电缆及控制电缆均通过立柱内腔。
1.1.2上横梁由钢板焊接而成,它上部装有起升用的定滑轮和支撑堆垛机的上部导向轮组。
钢丝绳通过这些滑轮及载货台上的动滑轮,使载货台能上升或下降。
1.1.3下横梁由钢板焊接而成,是堆垛机的主要支撑部件。
下横梁上装有运行驱动车轮组、从动车轮组、下部水平轮组及夹轨器等装置。
还装有红外通讯、电气控制柜及运行限位开关组等电气装置。
自动化立体仓库
自动化立体仓库,也叫自动化立体仓储,物流仓储中浮现的新概念,利用立体仓库设备可实现仓库高层合理化,存取自动化,操作简便化:自动化立体仓库,是当前技术水平较高的形式。
自动化立体仓库的主体由货架,巷道式堆垛起重机、入 (出) 库工作台和自动运进 (出) 及操作控制系统组成。
货架是钢结构或者钢筋混凝土结构的建造物或者结构体,货架内是标准尺寸的货位空间,巷道堆垛起重机穿行于货架之间的巷道中,完成存、取货的工作。
管理上采用计算机及条形码技术。
自动化立体仓库,也叫自动化立体仓储,物流仓储中浮现的新概念,利用立体仓库设备可实现仓库高层合理化,存取自动化,操作简便化:自动化立体仓库,是当前技术水平较高的形式。
自动化立体仓库的主体由货架,巷道式堆垛起重机、入(出)库工作台和自动运进(出)及操作控制系统组成。
货架是钢结构或者钢筋混凝土结构的建造物或者结构体,货架内是标准尺寸的货位空间,巷道堆垛起重机穿行于货架之间的巷道中,完成存、取货的工作。
管理上采用计算机系统,采用条形码技术或者 RFID 射频识别物料信息。
自动化立体仓库仓库的产生和发展是第二次世界大战之后生产和技术发展的结果。
50 年代初,美国浮现了采用桥式堆垛起重机的立体仓库; 50 年代末 60 年代初浮现了司机操作的巷道式堆垛起重机立体仓库; 1963 年美国率先在高架仓库中采用计算机控制技术,建立了第一座计算机控制的立体仓库。
此后,自动化立体仓库在美国和欧洲得到迅速发展,并形成为了专门的学科。
60 年代中期,日本开始兴建立体仓库,并且发展速度越来越快,成为当今世界上拥有自动化立体仓库最多的国家之一。
对立体仓库及其物料搬运设备的研制开始并不晚, 1963 年研制成第一台桥式堆垛起重机(机械部北京起重运输机械研究所), 1973 年开始研制我国第一座由计算机控制的自动化立体仓库(高 15 米,机械部起重所负责),该库1980 年投入运行。
到 2003 年为止,我国自动化立体仓库数量已超过 200 座。
(完整版)自动化立体仓库堆垛机设计
目录第1章绪论 (1)第1.1节研究的背景与内容 (1)1.1.1概述 (1)1.1.2有轨巷道堆垛机的发展现状及特点 (2)1.1.3有轨巷道堆垛机的类型 (3)1.1.4巷道堆垛机的特点 (5)第1.2节设计的目的和意义 (6)第1.3节设计的内容及要求 (6)第1.4节设计参数 (7)第2章总体设计方案的确定 (8)第2.1节堆垛机三维运动速度的确定 (9)第2.2节堆垛机各个部分的方案选择 (9)2.2.1堆垛机起升机构传动方式的选择 (9)2.2.2堆垛机行走机构传动方式的选择 (10)2.2.3堆垛机机架的设计思路 (11)2.2.4堆垛机货叉的设计思路 (11)2.2.5堆垛机安全方案的确定 (14)2.2.6堆垛机电控部分的设计 (14)第2.3节堆垛机的技术参数 (15)第2.4节堆垛机的技术要求 (16)第3章堆垛机起升机构的设计 (22)第3.1节起升机构的总体选型 (22)第3.2节卷筒的设计 (26)3.2.1卷筒部件计算 (26)3.2.2齿轮连接盘的计算 (31)第4章堆垛机行走机构和机架的选型设计 (35)第4.1节堆垛机行走机构的选型设计 (35)第4.2节堆垛机机架的选型设计 (38)第5章堆垛机货叉的设计 (39)第5.1节货叉传动装置的总体选型 (39)第5.2节货叉传动齿轮、齿条的计算 (39)第5.3节货叉传动链轮、链条的设计计算 (43)第5.4节制动器的制动容量的设计 (45)第6章堆垛机安全装置 (47)第6.1节防撞保护装置 (48)第6.2节钢丝绳断绳保护装置 (48)第7章堆垛机电控部分设计 (49)第7.1节电器控制系统 (50)7.1.1可编程控制器的结构及各部分的作用 (50)7.1.2可编程控制器的工作原理 (52)7.1.3可编程控制器的主要功能和特点 (54)第7.2节电器传动系统 (55)7.2.1常用变速系统 (55)7.2.2变频器的分类 (56)7.2.3变频器的特点 (60)第7.3节电控原理 (60)第8章总结 (62)参考文献 (63)翻译 (64)致谢 (84)第1章绪论第1.1节研究的背景与内容1.1.1概述随着生产力的发展, 生产规模的扩大和产品结构的调整, 客观上要求作为工业企业物资供应基地的物资仓库进行改建或扩建。
有轨堆垛机整体及行走机构的设计

有轨堆垛机整体及行走机构的设计摘要本文详细介绍了有轨堆垛机的整体结构设计理论和堆垛机行走机构的设计,其中重点放在了行走机构的设计上,在进行行走机构的设计时,主要是通过对行走机构的传动方案的选取,由运行阻力所决定的行走电机的选取,由速比决定的减速器的选取,以及制动装置制动器的选取和克服冲击的缓冲器等主要部件的选取,来进行设计的。
在根据设计要求对各部件初步选型后,都进行了校核,保证了选择的合理性。
在本文最后部分,对该堆垛机的稳定性进行了较为详细的讨论,保证了堆垛机工作时运行的平稳性。
本次设计的有轨堆垛机性能良好、动作灵活、操作方便、故障率低、维护简单方便,满足了生产的需要。
关键词:有轨堆垛机,机械,行走机构,稳定性The Design of the Overall structure and walking mechanism of a Stacker CraneAbstractThis paper describes in detail the design of the overall structure theory and walking mechanism of a stacker crane, in my design work I focus on the design of walking mechanism, when the design begins, I first select the transmission of the walking mechanism, second I select the motor by the running resistance of the walking system. Once the motor was selected,the speed ratio between the motor and the running wheels is definite. And we can select the reducer by the speed ratio. Other components such as brakes which is used to break when necessary can be selected by any requests of the system,so is the buffers,and so on.. In accordance with Design requirements, the initial selected components must be conducted a check to ensure the rationality of choice. In the last part of this paper, the stability of the crane is carried out in more detail discussion to ensure the stacker crane’s working stability.The design of the crane rail works out in good condition, action and flexible, convenient operation, low failure rate, maintenance,simple and convenient to meet the production needs.Keywords: crane rail,machine,run institutions,stability目录目录 (I)1. 绪论 (1)1.1 研究背景及内容 (1)1. 1. 1 有轨巷道堆垛机的发展 (1)1. 1. 2有轨巷道堆垛机的类型 (1)1. 1. 3有轨巷道堆垛机的发展现状及特点 (2)1.2变频调速技术简介 (3)1.2.1 变频器概述 (3)1.2.2变频器的分类: (3)1.2.3变频器的国内外发展现状 (5)1.3本文研究的内容 (6)2. 堆垛机的结构设计 (8)2.1堆垛机的结构特点 (8)2.2堆垛机门架的结构设计计算 (8)2.3 堆垛机门架的弯矩和挠度 (10)2.3.1 由于水平载荷产生的弯距 (10)2.3.2 由行走车轮的反力产生的弯距 (13)2.3.3 有叉取作业产生的弯矩 (14)2.4 设计数据计算校核 (14)2.4.1 框架结构的设计数据如下: (14)2.4.2 各部分的弯矩 (15)2.4.3 结构构件的弯曲应力 (16)3. 堆垛机行走机构的设计计算 (16)3.1堆垛机行走机构设计的基本原则和要求 (16)3.2 水平运行机构具体布置的主要问题: (16)3.3 机构的布置形式 (16)3.4 堆垛机设计计算 (16)3.4.1主动行走轮直径的确定 (16)3.4.2运行阻力计算 (17)3.4.3.行走电动机功率的计算 (18)3.4.4电动机的发热校验 (18)3.4.5 减速器的选择 (19)3.4.6验算运行速度和实际所需功率 (19)3.4.7 验算起动时间 (19)3.4.8 起动工况下校核减速器功率 (20)3.5选择制动器 (21)3.6 选择联轴器 (21)3.7 缓冲器的选择 (22)4. 堆垛机稳定性计算 (23)4.1堆垛机的稳定性分析 (23)4.2运行中立柱挠度的计算 (23)4.3运行中立柱的稳定性分析 (30)结论 (35)致谢 (36)1. 绪论近年来,随着企业生产与管理的不断提高,越来越多的企业认识到物流系统的改善与合理性对企业提高生产率、降低成本非常重要。
CUBICFMS立体仓库巷道式堆垛机
CUBICFMS立体仓库巷道式堆垛机
堆垛机是自动化立体仓库中最重要的搬运、起重、堆垛设备,对立体仓库的出入库效率有决定性影响,是立体仓库能否达到设计要求的关键设备之一。
堆垛机工作于立体仓库货架之间,为节省空间,加大有限空间的存货量,现代立体仓库货架间距做的很窄而高度很高。
堆垛机在此环境下工作,决定其整体结构高而窄,为防止倾倒,将堆垛机行走轨道设计成上下双轨,下部地轨起支撑和引导作用,上部天轨可支持堆垛机直立行走,保证不发生倾倒事故。
高而窄的结构也造成堆垛机沿高度方向刚度不足,在起停过程中振动严重,会延长定位时间,影响效率,也会造成堆垛机定位不准确,无法正常工作。
为减轻刚度不足造成的影响,堆垛机设计中要非常注意机构的动刚度。
按传统门架结构形式堆垛机可分为双立柱有轨巷道堆垛机和单立柱有轨巷道堆垛机:
(1)双立柱有轨巷道堆垛机
双立柱有轨巷道堆垛机由两根立柱、上横梁、下横梁和带货叉的载货台组成,立柱、上横梁和下横梁组成一个长方形的框架,一般称为机架。
这种堆垛机的最大优点就是强度和刚性都比较好,能快速起停、制动,并且运行平稳。
一般用在起升高度较高、起重量较大和水平运行速度较高的立体仓库中,其缺点是自重较大。
(2)单立柱有轨巷道堆垛机
单立柱有轨巷道堆垛机的机架由一根立柱、下横梁和上横梁组成。
立柱多采用型钢或焊接制作,立柱上附加导轨。
整机重量较轻,消耗材料少,因此制造成本相对较低,刚性稍差。
由于载货台和货物对立柱有偏心作用,以及行走、制动时产生的水平惯性力作用,使单立柱有轨巷道堆垛机在使用上有较大的局限性。
不适于起重量大和水平运行速度高的堆垛机。
有轨巷道堆垛起重机是随着立体仓库的出现而发展起来的专用起重机,通常简称为堆垛机。
有轨巷道堆垛起重机是随着立体仓库的出现而发展起来的专用起重机,通常简称为堆垛机。
堆垛机是立体仓库中非常重要的起重运输设备,是代表立体仓库特征的标志。
其主要用途是在高层货架仓库的巷道内沿轨道运行,将位于巷道口的货物存入货格;或者相反,取出货格内的货物运送到巷道口,完成出入库作业。
堆垛机是自动化立体仓库里面的存取货设备,一般分单立柱和双立柱结构,由行走、提升和货叉三个驱动机构完成作业要求,采用国际先进的伺服控制系统和认址系统进行全闭环控制,配合条码或激光测距等高精度认址方式,实现堆垛机高精度运行。
堆垛机载重量可达8吨左右,行走速度可高达400m/min。
根据轨道的走向可分为直轨型、弯轨型、转轨型和岔道型。
此外还有装有司机室的拣选堆垛机等多种类型堆垛机。
堆垛机结构稳定可靠,由矢量变频驱动和编码器位置控制,采用机械和电气双重保险装置,确保安全,采用信息传递全程跟踪技术,电气元件均采用进口产品,触摸屏界面操作简单,实现手动、单机自动和联机自动控制,与各种物流设备组合形成完整的物流系统。
堆垛机的手动控制是由操作人员通过操作面板上的按钮开关,直接操作堆垛机进行水平运行、载货台升降、货叉存取货物。
单机自动控制是由操作人员在出入库端通过堆垛机电控柜上的操作面板液晶触摸屏按钮输入出入库指令,堆垛机将自动完成出入库作业。
联机自动控制是由管理计算机自动分配出入库货位地址,通过监控计算机发出作业指令通过无线以太网将作业指令传输至堆垛机PLC,自动控制堆垛机完成作业,并将运行过程及工作状态反馈给监控计算机,显示在电脑屏幕上。
六维堆垛机主要选配SIEMENS、SEW、MIAS等全球先进供应商的标准化部件,使得产品质量更高,运行更稳定,维护成本更少。
堆垛机作为立体仓库中重要的运输设备,其各项技术参数的选用,将直接影响到整座立体仓库的运行效率和经济效益。
合理的选择各项参数,将大大提高整个系统的运行效率和经济效益。
与堆垛机的速度有关的参数,主要指水平运行速度、起升速度和货叉伸缩速度。
有轨巷道堆垛机PPT演示课件PPT35页
第16页,共35页。
四、 有轨巷道堆垛机的结构组成
巷道式堆垛机由起升机构、运行机构、载货台及取货装 置、机架以及电器部分组成。
起升机构
一、升降机构
是使载货台垂直运动的机构。一般由电动机、制动器、 减速机、滚筒或轮以及柔性件组成。常用的柔性件有钢丝绳
和起重链两种。除了一般的齿轮减速机外,由于需要比较大的速 比,因而采用蜗轮蜗杆减速机和行星减速机的也不少。起重链传 动装置多数装在上部,常配有平衡重块,以减小提升功率。为了 使起升机构结构紧凑,常常使用带制动器的电机。
控制系统
滑触线
通讯装置
缓冲垫
21
第21页,共35页。
货物单元承接装置通过 钢丝绳或链条与起升机构 联接。载货台可沿着立柱 导轨上下升降。取货装置 安装在载货台上,有司机 室的堆垛机,司机室一般 也在载货台上。
22
第22页,共35页。
二、运行机构 运行机构是堆垛机水平运行的驱动装置。一般由电动机、联轴器、 制动器、减速箱和行走车轮组成。行走轮结构分有轮缘和无轮缘 两种结构,有轮缘的车轮,当堆垛机货叉作业时,会对车轮产生啃轨力。
17
第17页,共35页。
巷道式堆垛机的结构
双 立 柱 型
18
第18页,共35页。
2.5 有轨巷道堆垛机—基本构造及工作原理
起升机构 行走机构
19 第19页,共35页。
2.5 有轨巷道堆垛机—基本构造及工作原理
机架
载货台及货叉
20
第20页,共35页。
检测装置
2.5 有轨巷道堆垛机—基本构造及工作原理
四、下降超速保护
不论什么原因,一旦载货台下降发生超速现象时,此保护装 置立刻将载货台夹住。
自动化立体仓库堆垛机的设计
自动化立体仓库堆垛机的设计一、引言自动化立体仓库堆垛机是一种用于高效存储和取货的机械设备,广泛应用于物流、仓储和制造业等领域。
本文将详细介绍自动化立体仓库堆垛机的设计要求、工作原理、主要组成部分以及相关技术参数。
二、设计要求1. 载重能力:自动化立体仓库堆垛机应具备足够的载重能力,以满足仓库货物存储和取货的需求。
设计时需根据实际情况确定最大载重能力,并确保机器的稳定性和安全性。
2. 堆垛高度:根据仓库的高度限制和货物堆垛的要求,确定自动化立体仓库堆垛机的最大堆垛高度。
该高度应能满足仓库的储存需求,并考虑到堆垛机的稳定性和安全性。
3. 作业速度:自动化立体仓库堆垛机的作业速度应高效且稳定,以提高仓库的货物处理效率。
根据仓库的需求和作业流程,确定合理的作业速度,并确保机器的精度和可靠性。
4. 控制系统:设计自动化立体仓库堆垛机时,需要考虑到控制系统的可靠性和灵活性。
控制系统应能实现自动化操作和监控,并具备故障检测和报警功能,以确保机器的正常运行和安全性。
5. 安全性:自动化立体仓库堆垛机的设计应符合相关安全标准和规定。
设计时需考虑到防护装置、紧急停机装置、防止碰撞装置等安全措施,以保障操作人员和设备的安全。
三、工作原理自动化立体仓库堆垛机通过操纵系统控制,实现货物的存储和取货。
其工作原理主要包括以下几个步骤:1. 货物接收:通过传送带或输送机将待存储的货物送至堆垛机的接收区域。
2. 货物提升:堆垛机的提升装置将货物提升至指定的高度,以便进行堆垛或取货操作。
3. 货物堆垛:堆垛机的横移装置将货物沿水平方向移动到指定位置,然后将其堆垛在储存区域。
4. 货物取货:根据需求,堆垛机将存储区域的货物取出,并通过输送带或输送机送至指定位置。
5. 堆垛机移动:堆垛机的行走装置可根据需要在仓库内移动,以便进行不同位置的堆垛和取货操作。
四、主要组成部分自动化立体仓库堆垛机主要由以下几个组成部分构成:1. 提升装置:用于将货物提升至指定的高度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
堆垛机
堆垛机是高架仓库内进行货物堆存作业的主要设备。
早期的堆垛机,是在桥式起重机的起重小车上悬挂一个立柱,利用货叉在立柱上的上下运动及立柱的旋转运动来搬运货物,通常称之为桥式堆垛机。
1960年左右在美国出现了巷道式堆垛机。
这种堆垛机是在地面导轨上行走,利用上部的导轨防止倾倒或偏斜。
其后,随着计算机控制技术和自动化立体仓库的发展,堆垛机的应用越来越广泛,技术性能越来越好,高度也在不断增加,到目前为止,堆垛机的高度可达40米以上。
对于中低高度的货架为了降低仓库建设成本和提高机动性,也发展了一种无轨巷道堆垛机,但是有轨巷道堆垛机的使用占据主导地位。
塑料托盘有轨巷道式堆垛机的主要用途
有轨巷道式堆垛机的主要用途是在高层货架的巷道内往复运行,将位于巷道口入库台上的货物存入货位,或者将货位内的货物取出送到巷道口的出库台。
随着立体仓库的发展,有轨巷道式堆垛机在堆垛机中的主导地位日益显著。
有轨巷道式堆垛机的类型
堆垛机的类型可按其支承方式、结构形式和作业方式等进行分类。
1.按结构形式分类
有轨巷道式堆垛机按其立柱形式不同可分为单立柱堆垛机和双立柱堆垛机。
(1)单立柱有轨巷道堆垛机
单立柱有轨巷道堆垛机的金属结构由一根立柱和下横梁组成。
这种堆垛机的自重轻,但刚性较差,一般用在起重量2吨以下,起升高度不大于45米的仓库。
其行走速度最高可达160m/min,载货台的升降速度最高可达60m/min,货叉伸缩速度最高可达48m/min。
(2)双立柱有轨巷道堆垛机
双立柱有轨巷道堆垛机的金属结构由两根立柱和上下横梁组成。
这种堆垛机刚性好,运行速度高,能快速起动和制动,但自重较大,起重量可达5吨,适于各种起升高度的仓库,能用于长大件货物的作业。
双立柱堆垛机两个立柱的排列方向可以和巷道平行,也可以和巷道垂直。
立柱形成的门架和巷道平行时只需要一条走行轨道,而垂直时则需要铺设两条轨道。
2.按支承方式分类
有轨巷道式堆垛机按支承方式可以分为地面支承式和悬挂式两种。
(1)地面支承式有轨巷道堆垛机
行走轨道铺设于地面上,靠下部的车轮支承和驱动。
上部导轮用来防止堆垛机倾倒或摆动,在遥控时可兼作信号电缆吊架的导轨。
这种堆垛机金属结构的立柱主要考虑轨道平面内的弯曲强度,因此,需要加大立柱在行走方向截面的惯性矩。
由于驱动装置均装在下横梁上,容易保养维修。
用于自动控制的传感器也可安装在地面上,使用方便。
(2)悬挂式堆垛机
悬挂堆垛机悬挂在巷道上方的轨道下翼缘上运行,其行走机构安装在堆垛机门架的上部。
在地面上也铺设有导轨,使门架下部的导轮以一定的间隙夹持在导轨的两侧,从而防止堆垛机运行时产生的摆动和倾斜。
堆垛机的载货台(包括伸缩
货叉、司机室)沿门架上下升降的动作是由安装在门架上部的升降装置来实现的。
另外,堆垛机的集电装置也安装在门架的上部,通过电缆将电力输入到司机室电气控制系统中。
悬挂式堆垛机有如下优点:在设计门架(即金属结构)时,可不考虑横向的弯曲强度,钢结构自重可以减轻,加减速时的惯性和摆动小,稳定静止所需的时间就短。
其缺点是行走、升降等驱动机构安装在堆垛机的上部,对其保养、检查与修理必须进行高空作业,既不方便也不安全,而且仓库的屋顶和货架要承担堆垛机的全部移动荷重,从而增加了屋顶结构和货架的重量。
3.按作业方式分类
悬挂式巷道堆垛机按作业方式可分为单元式堆垛机、拣选式堆垛机和拣选一单元混合式堆垛机。
单元式堆垛机是对托盘(或货箱)单元进行入、出库作业的堆垛机,向货架存取单元货物时使用货叉。
拣选式堆垛机是由操作人员向(或从)货格内的托盘(或货箱)中存入(或取出)少量货物,进行出入库作业的堆垛机。
这种堆垛机的特点是没有货叉。
拣选一单元混合式堆垛机是具有单元型与拣选式综合功能的堆垛机,其载货台上既有货叉装置,又有司机室,可满足两种作业方式的要求。