第三章-用有限元素法建立结构振动的数学模型
动力学有限元

6.2结构动力有限元法理论与模型一、基本原理在实际问题的求解中,应用最广的是基于位移的有限元素法。
此法的基本思想是把本来为连续的工程结构分割成在结点上相联的单元组合体。
取这些结点的位移为基本未知量,并假定每个单元中的位移用单元位移函数来描述,这实质上是假定了单元的模态。
在此基础上,利用能量变分原理进行单元分析的全结构分析,得到全结构的振动平衡方程,从而把连续体的动力学问题化为多自由度系统的振动问题。
有限元动力分析的基本过程是首先将工程结构离散化,通过选择合理的单元确定出分析模型,在此基础上选择位移函数,进行单元分析,确定单元的刚度、质量、阻尼、载荷矩阵,再经过坐标变换,通过能量变分原理,进行全结构分析,建立系统的振动平衡方程。
最后运用有限元数值方法进行方程的求解。
结构动力有限元法采用的单元位移函数与静力分析相同,基本原理和求解过程也与静力分析相同,不同之处仅在分析模型的确定与运动方程的建立方面。
二、动态分析模型的确定由于结构动态分析中除考虑弹性力外,还要考虑惯性力和阻尼力,其运动方程是常微分方程组,所以动态分析的复杂程度高,计算工作量大,有限元分析模型要尽量精炼、简单。
1.模型确定的基本原则•分析模型应与分析的目的相适应。
动力分析的目的各不相同,有的是为了提供固有特性计算动态响应或供控制系统用;有的是为了舱内提供振动环境。
不同的目的,通常要求不同的模态数与计算精度。
显然,用于估算基本固有频率的模型应当比计算冲击响应的模型简单。
用于设计计算的模型应当比用于校核计算的模型简单。
•分析模型要与选用的计算工具与计算条件相适应。
计算机软件种类日益丰富,选择分析模型要与所用程序、所用计算机容量相适应。
如对于容量大的计算机,可选用较为复杂的有限元模型,而对于容量小的计算机则在能反映结构动态性能的前提下尽量简化模型,使求解规模尽量小。
对于大模型,可选用子结构模型,采用模态综合方法求解。
应注意, 不一定模型愈精细精度就愈高。
机翼有限元模型振动和颤振特性分析
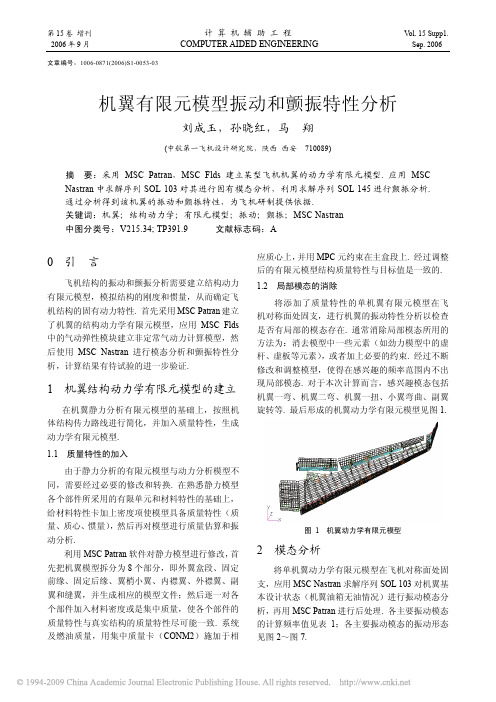
第15卷增刊计算机辅助工程 V ol. 15 Supp1. 2006年9月COMPUTER AIDED ENGINEERING Sep. 2006 文章编号:1006-0871(2006)S1-0053-03机翼有限元模型振动和颤振特性分析刘成玉,孙晓红,马翔(中航第一飞机设计研究院,陕西西安 710089)摘 要:采用MSC Patran,MSC Flds建立某型飞机机翼的动力学有限元模型. 应用MSC Nastran中求解序列SOL 103对其进行固有模态分析,利用求解序列SOL 145进行颤振分析.通过分析得到该机翼的振动和颤振特性,为飞机研制提供依据.关键词:机翼;结构动力学;有限元模型;振动;颤振;MSC Nastran中图分类号:V215.34; TP391.9文献标志码:A0 引言飞机结构的振动和颤振分析需要建立结构动力有限元模型,模拟结构的刚度和惯量,从而确定飞机结构的固有动力特性. 首先采用MSC Patran建立了机翼的结构动力学有限元模型,应用MSC Flds 中的气动弹性模块建立非定常气动力计算模型,然后使用MSC Nastran进行模态分析和颤振特性分析,计算结果有待试验的进一步验证.1 机翼结构动力学有限元模型的建立在机翼静力分析有限元模型的基础上,按照机体结构传力路线进行简化,并加入质量特性,生成动力学有限元模型.1.1 质量特性的加入由于静力分析的有限元模型与动力分析模型不同,需要经过必要的修改和转换. 在熟悉静力模型各个部件所采用的有限单元和材料特性的基础上,给材料特性卡加上密度项使模型具备质量特性(质量、质心、惯量),然后再对模型进行质量估算和振动分析.利用MSC Patran软件对静力模型进行修改,首先把机翼模型拆分为8个部分,即外翼盒段、固定前缘、固定后缘、翼梢小翼、内襟翼、外襟翼、副翼和缝翼,并生成相应的模型文件;然后逐一对各个部件加入材料密度或是集中质量,使各个部件的质量特性与真实结构的质量特性尽可能一致. 系统及燃油质量,用集中质量卡(CONM2)施加于相应质心上,并用MPC元约束在主盒段上. 经过调整后的有限元模型结构质量特性与目标值是一致的.1.2 局部模态的消除将添加了质量特性的单机翼有限元模型在飞机对称面处固支,进行机翼的振动特性分析以检查是否有局部的模态存在. 通常消除局部模态所用的方法为:消去模型中一些元素(如劲力模型中的虚杆、虚板等元素),或者加上必要的约束. 经过不断修改和调整模型,使得在感兴趣的频率范围内不出现局部模态. 对于本次计算而言,感兴趣模态包括机翼一弯、机翼二弯、机翼一扭、小翼弯曲、副翼旋转等. 最后形成的机翼动力学有限元模型见图1.图 1 机翼动力学有限元模型2 模态分析将单机翼动力学有限元模型在飞机对称面处固支,应用MSC Nastran求解序列SOL 103对机翼基本设计状态(机翼油箱无油情况)进行振动模态分析,再用MSC Patran进行后处理. 各主要振动模态的计算频率值见表1;各主要振动模态的振动形态见图2~图7.54 计 算 机 辅 助 工 程 2006年表 1 机翼固有频率计算结果模态阶数模态名称 计算频率/Hz1 机翼一弯 3.332 机翼水平一弯 8.463 机翼二弯 9.404 机翼三弯 15.165 机翼一扭 19.586 小翼弯曲 22.517 机翼水平二弯 24.548 机翼二扭 27.17 9副翼旋转28.77图 2 机翼1阶弯曲模态图 3 机翼2阶弯曲模态图 4 机翼3阶弯曲模态图 5 机翼1阶扭转模态图 6 翼尖小翼弯曲模态图 7 副翼旋转模态3 颤振特性分析3.1 机翼颤振计算气动分区及网格划分应用MSC Flightloads 中的气动弹性模块,将机翼划分为6个气动分区,其中副翼、翼尖小翼单独分区;机翼的主翼面分别从内、外襟翼的分界处,襟翼、副翼分界处,副翼外边界及翼尖小翼根部划分. 机翼的气动分区及网格划分见图8.图 8 机翼气动分区及网格划分3.2 机翼基本设计状态的颤振分析应用MSC Nastran 求解序列SOL 145对机翼有限元动力模型进行变飞行高度的颤振计算. 颤振计算结果见表2,在飞行零高度下的颤振计算v-g-f 曲线见图9. 飞行高度在2 200 m 计算颤振速度V f 为324.60 m/s ,则当量颤振速度V Fdl 为:V Fd1=28.291986.0/225.1/60.324//0==ρρf V m/s 从表2和图9可见机翼颤振机理主要是以机翼一扭模态为主、机翼弯曲模态参与的耦合型颤振.表 2 机翼基本设计状态变飞行高度颤振计算结果飞行高度/m 0 2200 7300 10688 颤振速度Vf/m·s -1 296.47324.60 412.0 497.07颤振频率/Hz16.0216.00 15.91 15.85当量颤振速度/ m·s -1296.47291.28 281.62 276.15颤振机理机翼弯扭型颤振增刊 刘成玉,等:机翼有限元模型振动和颤振特性分析 55f (H z )V (m/s)图 9 机翼基本设计状态(机翼无油、飞行0高度)v-g-f 曲线4 结束语建模中往往存在某些不确定的因素,如果模型建立的比较合理,用MSC Nastran 可以给出非常接近实际的结果. 对机翼结构做动态特性分析,要做到从理论上准确计算固有频率,必须构建出一个精确的动力学有限元模型,而建模及分析的准确性,必须用试验加以验证. 在目前质量和刚度分布数据条件下,通过对机翼有限元模型的振动和颤振特性分析,可以看出机翼的颤振机理是以机翼一扭为主、弯曲模态参与的突发型颤振;基本设计状态下机翼颤振特性符合颤振包线的要求.参考文献:[1] MSC Patran User’s Manual[K].[2] MSC Nastran Quick Reference Guide[K].[3] MSC Nastran Aeroelastic Analysis User’s Guide[K].(编辑 廖粤新)。
有限元法与程序-结构振动3

(1)标准Lanczos法
设标准特征值问题
K {x} {x}
其中:K为n×n阶矩阵。首先选取适当的初始迭代
向量{U1},且{U1}T{U1}=1计算
{U k 1} ( K{U k } k {U k } k {U k 1}) / k 1
1 0
其中,
k {U k }T K{U k }
{ x} 1{ y1 } 2 { y 2 } q { y q } i { y i } Y { }
i 1 q
由Rayleigh商得
{x}T K {x} { }T Y T KY{ } R({x}) T {x} M{x} { }T Y T MY{ }
2. 子空间迭代法 由上节讨论知道,逆迭代法可以使迭代向量向 最低阶特征向量靠近。利用这一点,把逆迭代 法和Rayleigh-Ritz法相结合,交替使用逆迭代 法和Rayleigh-Ritz法,即用逆迭代中的初始向 量组作为Ritz基向量,利用Rayleigh-Ritz法在子 空间中求解低阶广义特征值问题,再用子空间 中的特征向量作为Ritz基的坐标,得到一组新 的Ritz基向量,即迭代向量。不断改善Ritz向 量基,使得Ritz基向量空间不断向原问题的q 阶向量空间靠拢,从而求得越来越精确的解, 这就是子空间迭代法的基本思想 。
令β1=1,作 (1) k {U k }T M{uk }
(2) {wk } {u k } k {U k }
T { w } M{wk } (3) k 1 k
(4) {U k 1} {wk } / k 1
(5) {uk 1} K 1 M{U k 1} k 1{U k }
2({}T M {})K {} 2({}T K {})M {} {0}
《有限元素法》课件
有限元素法的应用范围
讨论有限元素法在结构力学、电磁学、热力学、流体力学等领域的应用。
有限元素法的优点与缺点
分析有限元素法的优势和局限性,包括精度、计算成本和模型简化等方面。有限元素法中常用的数学公式
罗列有限元素法中常见的数学方程和公式,如有限元刚度矩阵和载荷向量等。
《有限元素法》PPT课件
有限元素法是一种广泛应用于工程领域的数值模拟方法,通过将复杂结构划 分为互不重叠的小单元,以近似的方式求解整个系统的行为。
有限元素法的概述
介绍有限元素法的起源、基本思想和应用领域。展示仿真结果。
有限元素方法的基本原理
探讨有限元素方法的数学基础和数值计算步骤。
有限元素法的速算方法
有限元素法中的网格划分
探讨有限元素法中的网格划分技术,包括三角形、四边形和非结构化网格等。
结构动力学有限元法

100%
动力响应分析
研究车辆、风、地震等外部激励 下桥梁的动力响应,评估其安全 性能。
80%
稳定性分析
分析桥梁在极端载荷下的稳定性 ,确保其正常工作。
建筑结构的抗震分析
地震作用下的结构响应
通过有限元法模拟地震对建筑 结构的作用,计算结构的位移 、加速度等响应。
结构抗震性能评估
根据计算结果评估建筑结构的 抗震性能,优化设计以提高其 抗震能力。
局限性
由于结构动力学有限元法需要进行大量的数值计算和存储,因此 对于大规模复杂结构的分析可能会面临计算效率和精度方面的问 题。此外,对于一些特殊结构和复杂工况,可能需要采用特殊的 建模和分析方法。
04
结构动力学有限元法的应用实例
桥梁结构的动力学分析
80%
桥梁结构的模态分析
通过有限元法计算桥梁的固有频 率和振型,了解其自振特性。
结构减震设计
利用有限元法进行减震设计, 如设置隔震支座、阻尼器等, 降低地震对结构的影响。
机械设备的动态特性分析
01
设备模态分析
02
设备振动分析
03
设备优化设计
通过有限元法分析机械设备的固 有频率和振型,了解其动态特性。
研究机械设备在工作过程中的振 动情况,分析其振动原因和影响。
根据动态特性分析结果,优化机 械设备的设计,降低振动和噪声。
用于分析电磁场的分布和变化规律,如电机、变 压器、天线等。
流体动力学
用于模拟流体在各种条件下的流动特性,如航空 、航海、管道流动等。
热传导分析
用于分析温度场的变化和热量传递规律,如热力 管道、电子设备等。
有限元法的研究意义
提高工程设计的可靠性和安全性
有限元第3章-杆件结构的有限元法_虚功原理

其中
K B EBdV B EB dV
(e) x T T V V
1 L EA 1 1 E 1 L 1 LAL 1 1 1 L L
将 Fx( e )
和F 的表达式合写在一起就是 F K
根据虚功原理 有
* x T
Win t Wext
T T
F B
(e) x V * x
EB x dV
两边消去 x*
(e) x V
F B
即
T
T
EB x dV B EBdV x
T V
F K
u1 u1 1 L 1 L B u 2 u 2
第五步:求应力—应变—节点位移间的关系
u1 u1 E EB E 1 L 1 L u 2 u 2
第六步:节点位移和节点力的关系 虚功原理:外力在虚位移上所做的功,等于内应 力在相应虚应变上所作的功。 外力在虚位移上所做的功为
(e) Fy1 0 0 v1 (e) 0 0 v 2 Fy 2
下面建立 x 方向位移的插值函数。 设杆件内任意一点沿 x 的位移向量为
x u 1 2 x
第三步:求单元内任意一点的位移与节点位移的 关系 由 x1 0, u u1 ; x2 L, u u2 可写出
0 0 0 0
小结: (1)本章从设置位移函数(也称为位移插值函 数或试探函数)出发,利用虚功原理导出了局 部坐标系下的杆单元的有限元计算格式,利用 前一章的坐标变换矩阵[T],就可以将它转换到 整体坐标系下,然后将各单元的刚度矩阵按照 节点力平衡的原理,经过叠加,即可得到总体 刚度矩阵。 (2)本章的方法具有一般性。 (3)位移插值函数的选择与单元节点的数目有 关。一般不可能精确描述单元内各点真实的位 移情况。
结构动力学问题的有限元法
01
工程中受动载荷的产品:受道路载荷的汽车;受风载的雷达;
02
受海浪冲击的海洋平台;受偏心离心力作用的旋转机械等。
03
动态分析的必要性:当产品受到随时间变化的动载荷时,需
04
要进行动态分析,以了解产品动态特性。
动载荷(又称动力分析)
固有特性分析
响应分析
固
有
振
频
型
率
位 移 响 应
量 0 矩2阵0取决1 于0 单1 元的类型和形函
m
e c
tA
12
数 10 的10形02式。02
1 0
0
1
1 0 1 0 2 0
0 1 0 1 0 2
2. 集中质量矩阵
集中质量矩阵将单元的分布质量按等效原则分配 在各个节点上,等效原则
就是要求不改变原单元的质量中心,这样形成的 质量矩阵称为集中质量矩
M qK q0
添加标题qejt 添加标题
由于固有特性与外载荷 无关,且阻尼对固有频 率和振型影响不大,因 此可通过无阻尼自由振 动方程计算固有特性。
式中,ω为简谐振动圆 频率;{Φ}为节点振幅 列向量。
添加标题
由于自由振动可分解为 一系列简谐振动的叠加, 因此上式的解可设为
单 击 此 处 K2M 振型{ Φ0 i}是结构按频率ωi振动时各自由度方向振幅间的相对比
i(i=1,2,…..,n)就是结构
的i阶模态振型。
固 要
有特性k1分1
有K d
析实际
k22
上
就
是
求
解广
M d
义m特11
征值
m22
问
题
5-结构动力学(有限元计算)解读

结构分析模型
结构分析模型是结构模型的一种,是反 映真实结构几何与物理特性、供结构分析使 用的简化抽象计算图形。建立结构分析模型 是是实施结构动力反应分析的关键环节之一, 直接影响分析结果的可靠性。确定分析模型 的基本原则是反映真实结构的质量分布和抗 力体系,能描述结构在外界荷载作用下的变 形性质、且便于使用。模型的简化程度取决 于结构特征和计算目标,并与计算方法密切 相关;电子计算机的普及应用极大推动了分 析模型的发展。
f I f D fS p(t )
3.2.1.1-3 3.2.1.1-4
即
mu cu ku p(t )
公式 3.2.1.1-4 即为单自由度体系运动方程。
虚位移原理
虚位移原理可表述为:如果一组力作用下的平衡体系 承受一个虚位移(即体系约束所允许的任何微小位移), 则这些力所作的总功(虚功)等于零,虚功为零和体系平 衡是等价的。因此,只要明了作用于体系质量上的全部力 (包括按照达兰贝尔原理所定义的惯性力),然后引入对 应每个自由度的虚位移,并使全部力作的功等于零,则可 导出运动方程。虚功为标量,故可依代数方法相加,这是 此法的主要优点。 当结构体系相当复杂,且包含许多彼此联系的质量点 或有限尺寸的质量块时,直接写出作用于体系上的所有力 的平衡方程可能是困难的;尽管作用于体系的力可以容易 地用位移自由度来表示,但它们的平衡关系则可能十分复 杂。此时,利用虚位移原理建立运动方程更为方便。
大,且积分方程求解困难,故一般不采用式(3.2.4)进行实际振动分析。
频域运动方程
时域运动方程经傅立叶变换可得频域运动方程。多自由 度弹性体系在地震作用下的频域运动方程为:
U () Hdd ()Ug ()
3.2.5
式中: U ( ) 为频域的地震反应矢量; H dd ( ) 为系统传递函 数矩阵; Ug () 为频域中的地震动输入矢量。运动方程(5) 为复数代数方程组,体系的频域反应经傅立叶反变换可得时 域反应。
种振动模型的设计求解及应用
种振动模型的设计求解及应用引言振动在生活中是十分常见的现象,如汽车发动机运转时会产生振动,而振动会导致各种问题,如噪音、磨损和破坏等。
因此,设计和求解振动模型对于预测和控制机械系统的振动至关重要。
本文将讨论振动模型的设计和求解,并介绍其在实际中的应用。
振动模型的设计振动模型的设计需要考虑系统的特定几何结构和材料参数,以及振动的类型和频率范围。
下面将介绍常用的几种振动模型。
1. 一维简谐振动模型一维简谐振动模型是指系统在一个固定的点上做简谐运动的振动模型。
其方程可以表示为:$$m\\frac{\\mathrm{d}^2 x}{\\mathrm{d}t^2} + kx = 0$$其中,m是系统的质量,k是系统的弹性系数,x是系统的运动位移。
该模型常用于描述弹簧和质量振子的振动。
2. 简支梁振动模型简支梁振动模型是指在梁的两端都有铰链支持的系统。
其方程可以表示为:$$\\frac{\\mathrm{d}^2}{\\mathrm{d}t^2}\\left(EI\\frac{\\math rm{d}^2 y}{\\mathrm{d}x^2}\\right) + \\rho A\\frac{\\mathrm{d}^2 y}{\\mathrm{d}t^2}=0$$其中,EI是梁的弯曲刚度,$\\rho$ 是梁的密度,A是梁的截面积,y(x,t)是梁的挠度。
该模型常用于描述梁的振动。
3. 旋转振动模型旋转振动模型是指围绕一个旋转轴做圆周运动的系统。
其方程可以表示为:$$\\frac{\\mathrm{d}^2 \\theta}{\\mathrm{d}t^2} +2\\zeta\\omega_n \\frac{\\mathrm{d} \\theta}{\\mathrm{d}t} +\\omega_n^2 \\theta = 0$$其中,$\\theta$ 是系统的角位移,$\\zeta$ 是系统的阻尼比,$\\omega_n$ 是系统的固有频率。
用有限元法(FEM)对轻型汽车的振动进行分析

用有限元法(FEM)对轻型汽车的振动进行分析
韦然
【期刊名称】《贵州航天》
【年(卷),期】1992(000)003
【总页数】10页(P34-42,F003)
【作者】韦然
【作者单位】无
【正文语种】中文
【中图分类】U461.56
【相关文献】
1.基于有限元法进行人体腓肠肌振动模型仿真研究 [J], 张海岛;闵一建;刘新元;龙娇群
2.应用有限元法(FEM)验证在直齿轮和斜齿轮内采用ISO和AGMA标准的齿根强度的比较分析 [J], Andrzej kawalec;Jerzy Wiktor;Dariusz Ceglarek
3.应用有限元法(FEM)验证在直齿轮和斜齿轮内采用ISO和AGMA标准的齿根强度的比较分析 [J], Andrzej kawalec;Jerzy Wiktor;Dariusz Ceglarek
4.利用扩展有限元法(xfem)对玄武岩矿物纤维沥青混合料裂纹扩展特征的分析 [J], 王生武;赵云;赵丽华
5.轻型汽车前保险杠的非线性有限元法分析 [J], 刘步丰
因版权原因,仅展示原文概要,查看原文内容请购买。
基于有限元法的振动分析 郑佳文
20
二 梁单元
如下图所示,一个梁单元也是有两个节点,但是有四个自由度,每个节
点处,有两种位移形式,一个是线位移,即挠度,一种是角位移。 图中, f1 t , f 3 t 是力,
f 2 t , f 4 t 是力矩。
是对应的线位移,
1 t , 3 t
2 t , 4 t 是对应的转角。
o
x
平面三角形单元
26
首先,我们来分析一下三角形单元的力学特性,即建立 以单元节点位移表示单元内各点位移的关系式。设单元 e的节点编号为i、j、m,如图3-2所示。由弹性力学平 面问题可知,每个节点在其单元平面内的位移可以有两 个分量,所以整个三角形单元将有六个节点位移分量, 即六个自由度。用列阵可表示为:
(2)
只有满足此条件单元才能协调一致运动,而不致破坏 系统的完整性,因此这两个条件实际上就是变形协调 条件。将式(1)带入(2)中,就可以得到形状函 数Φ1(x)、Φ2(x)所满足的边界条件:
1 0 1, 1 l 0,
2 0 0 2 l 1
(3)
8
、2 x 由于这两个函数的任意性 以上边界条件确定了1 x
bi 0 b j 0 bm 0 1 e 0 c 0 c 0 c i j m 2 ci bi c j b j cm bm
(g)
33
可简写成
B
B Bi
Bj Bm
e
(3-13) (3-14)
其中 [B] 矩阵叫做单元应变矩阵,可写成分块形式
上式可以写成形状函数的表示:
其中,形函数分别为:
(19)
梁单元的动能、势能、虚功表达式分别为:
23
转子动力学有限元法计算及编程

转子动力学有限元法计算及编程转子动力学有限元法计算及编程一、引言转子动力学是一门研究转子在高速旋转过程中的振动特性以及相关问题的学科。
它广泛应用于航空、能源、机械等各个领域。
在实际工程中,准确预测和分析转子振动对于确保系统的安全性、工作效率和可靠性至关重要。
转子动力学有限元法(Rotor Dynamics Finite Element Method)通过应用有限元法理论和技术,能够有效地模拟和分析转子的振动问题,成为一种重要的数值计算方法。
二、有限元法基础有限元法是一种常用的工程计算方法,通过将连续物体离散化为有限数量的单元,然后在每个单元上进行力学分析,最终得出整个结构的力学性能。
在转子动力学有限元法中,转子被近似为连续的刚体。
系统的振动模态可以通过求解刚体的运动方程得到,其中包括刚体的转动和位移。
三、有限元法振动问题模型建立1. 系统几何模型在有限元法中,转子可以被近似为一系列的刚性单元。
每个转子单元的转子几何参数、质量特性和刚度特性都需要被确定。
2. 材料参数及转动惯量为了建立准确的数学模型,需要确定转子材料参数,如材料的弹性模量、材料的泊松比等。
还需要考虑转子的转动惯量,它与转子的几何形状和密度分布直接相关。
3. 支承刚度和系统运动方程转子系统的支承刚度是转子动力学分析中的关键参数之一。
支承刚度对转子的振动特性有着重要的影响。
根据系统的几何形状和支承结构,可以得到转子的运动方程。
四、转子动力学有限元法编程转子动力学有限元法编程的实现可以通过使用适当的编程语言和数值计算库来完成。
MATLAB或Python等编程语言可以用于转子动力学的模型建立和数值计算。
在编程过程中,需要先建立转子的有限元模型,包括几何参数、刚度特性和质量分布等信息。
可以通过求解转子的运动方程来获得系统的振动模态和振型。
可以对转子系统进行参数求解、模态分析和振动响应分析等。
五、转子动力学有限元法的应用和发展前景转子动力学有限元法在航空、动力机械、电力、工业流程等领域具有广泛的应用前景。
基于有限元方法的振动系统动力学分析

基于有限元方法的振动系统动力学分析振动是物体在外部作用下发生周期性的自由运动,广泛存在于自然界和人工工程中。
对于工程领域来说,振动是一种常见而且重要的现象,需要进行充分研究和掌握。
因为工业领域中的精密机械设备、航空航天器、桥梁、建筑等都要受到振动的影响,因此了解和掌握振动分析成为了一项必要的工作。
在振动分析中,有限元方法是一种重要的数值计算技术,能够用来计算系统在特定工况下的自由振动、强迫振动和动态特性等。
有限元方法的基本思想是将物体整体离散成若干元,然后针对每个元的受力状态对其进行计算。
因为在物理学和工程领域中,大部分振动问题都可以抽象成弹性振动问题,因此有限元方法也用得较为广泛。
下面我们将从振动系统模型建立,有限元方法的原理和实现以及动力学分析等方面进行阐述,以期为工程领域的借鉴提供一定的帮助。
一、振动系统模型建立首先,我们需要理解振动系统的原理和发展规律,然后再将其抽象成一种数学模型。
在工程领域常见的振动系统有机械弹簧阻尼振动系统、电路RLC振动系统等,这里我们以机械弹簧阻尼振动系统为例。
1.1 建立振动系统模型机械弹簧阻尼振动系统的简化模型由三个主要元素组成:质点、弹簧和阻尼器。
其中,质点质量为m,其自由度为x,弹簧的刚度为k,弹簧自由度为u,阻尼器的阻尼系数为c。
将质点与弹簧、阻尼器建立作用关系如下:1. 质点的受力情况:F = m*x''(t) (1)其中,x''(t)表示自由度x对时间t的二阶微分。
2. 弹簧的变形条件:u = x1 - x2 (2)其中,x1、x2为弹簧两端对应的自由度,利用胡克定律可以得到:F = k*u (3)3. 阻尼器的作用:F = -c*x'(t) (4)其中,x'(t)表示自由度x对时间t的一阶微分。
此时,质点、弹簧、阻尼器三者之间的作用力平衡,即有F = m*x''(t) = -k*x(t) - c*x'(t) (5)使用微分方程的方法可以得到质点加速度x''(t)关于时间t的方程,即:m*x''(t) + c*x'(t) + k*x(t) = f(t) (6)其中,f(t)为外界作用力。
有限元素法

本章主要是探討有限元素法分析技巧,首先提到的是如何將選定區域作離散 化 , 並且對離散單元作編碼 , 最後是對有限元素法於光子晶體計算的應用作介紹 。
3.1 有限元素法簡介
有限元素法是一種解析方法,而它的發展歷史是由1850年到1875年,法國彈 性力學家如那維爾及聖維農等人所開啟。有限元素法與其它方法擬建立數值模擬 解相類似,皆需要推導及解析代數方程式,其快速發展已經普遍被人重視,且由 早期的結構力學應用,如今已廣泛的被應用於熱傳導、能流及電磁波等現象分 析。有限元素法的基本觀念是任何連續量均可用一不連續函數的型式作近似表 示。此型式乃為有限區域的集合分段連續函數所組成。使用連續量的值,以定義 分段連續函數在其有限數次域 (subdomain)。
edge(1,e) 2 3
edge(1,e) 5 4
【表3-2 紀錄相對應邊編碼】 實際上而言,此種編碼方式並非唯一,也可將第一個三角形切割單元的三個 不同節點編成3、1、2或2、3、1,只要遵從逆時針方向即可。因此可知,邊的編 碼也非唯一,但仍須遵從逆時針方向。
3.3 單元插值
【圖3-5典型的三角形切割單元】
26
上式中, x ej 和 y ej ( j = 1, 2,3) 表示第e個單元中第j個節點座標
3.4 有限元素法之光子晶體計算
根據電磁波理論 , 光子晶體內的電磁波傳播是由馬克斯威爾方程式 (Maxwell 出發。
∇•B = 0
(3.8) (3.9) (3.10) (3.11)
23
以對我們所希望的精度,應當維持於單元數最少化的要求。因此我們可知最好的 方法是在計算變化較大的區域採用較小的切割單元,而在計算變化較小的的區域 採用較大的切割單元。 標示計算的每個組成單元時,單元編碼可由單一組整數表示;此外,若是其 它的組成切割單元頂點處之節點,可採用另一組整數作為其它節點的編碼。因為 每一個單元皆與數個節點有關連,因此,一節點除了具有在整個區域中的位置 外,還有在其相對應的切割單元中的位置,因此可將編碼分為下述幾種,分別為 整體邊編碼、局部節點編碼、局部邊編碼、單元編碼與整體節點編碼。為了方便 了解,可用圖3-1、3-2描述。
有限元仿真时长-概述说明以及解释
有限元仿真时长-概述说明以及解释1.引言1.1 概述有限元仿真是一种广泛应用于工程领域的数值计算方法,它通过将复杂的实际问题抽象为有限数量的小元素来近似解决。
在实际工程中,有限元仿真被广泛应用于结构分析、流体力学、电磁场分析等各个领域。
有限元仿真的基本原理是将大的连续体划分为小的离散单元,通过对每个单元的力、位移和应力进行计算,进而推算出整个体系的响应。
通过此方法,可以预测物体在不同负载和工况下的行为,例如材料的应力分布、位移变形以及应变变化情况。
有限元仿真的应用领域非常广泛,涵盖了许多工程和科学领域。
其中包括但不限于结构工程、电子器件设计、航空航天工程、汽车工程等。
在结构分析领域,有限元仿真可以帮助工程师评估和优化设计,提高结构的强度和稳定性;在电子器件设计中,可以模拟电流和电磁场的分布,帮助设计师优化电路板布局;在航空航天和汽车工程中,可以预测飞机或汽车在不同条件下的性能表现,提高飞行安全性和汽车的稳定性。
然而,尽管有限元仿真在工程领域有着广泛的应用和价值,但其时长也是一个需要关注的因素。
有限元仿真所需的计算时间通常是一个长过程,尤其是在处理大规模和复杂的问题时。
长时间的仿真过程可能会对工程设计和决策产生不良影响,因此减少有限元仿真的时长是一个重要的课题。
在本篇文章中,我们将从不同角度来探讨有限元仿真时长的重要性和影响因素。
通过对这些因素的分析,可以帮助工程师和研究人员更好地理解有限元仿真的时长,并提出相应的优化措施,从而提高仿真的效率和准确性。
接下来的章节将详细介绍有限元仿真的基本原理以及其在不同领域的应用,并进一步探讨有限元仿真时长的重要性和影响因素。
文章结构部分需要介绍本文的组织结构和章节安排,下面是文章结构部分的内容:1.2 文章结构本文分为以下几个章节来介绍有限元仿真时长的相关内容:第一章引言引言部分为本文开篇,将对有限元仿真时长的重要性进行概述,并介绍本文的目的和整体结构。
第二章正文正文部分将首先介绍有限元仿真的基本原理,包括有限元分析的基本概念和步骤,以及有限元法在工程领域中的应用。
振动问题的有限元分析法

u(x, t) = N1 (x)u1(t) + N 2 (x)u2 (t)
式中 N1 (x), N 2 (x) 为形函数也称为插值函数,它们应使点的位移满足单元的边界条件,即
u(0,t) = u1(t) , u(l,t) = u2 (t)
177
PDF created with pdfFactory Pro trial version
可得到
∂u
εx
ε
y
∂x ∂v
∂y ∂w
ε
=
εγ
z x
=
∂u
∂z +
∂v
γ γ
y z
∂y ∂x
∂v ∂∂wz ∂x
+ +
∂w
∂y ∂u
∂z
ε = Bq e = [B1 B2 B3 L]qe
D 为应力应变关系矩阵,又称为弹性矩阵,所以单元体的应变能为
(7-5) (7-6)
(7-7)
U
=
∫∫∫ V
1 2
ε
Tσ
dV
=
∫∫∫ 1 (q e )T BT DBq e
V2
dV
(7-8)
设单元体振动时,受有正比于速度的阻尼力,阻尼系数为 c,则单元体积上所受的阻尼力为
− cq 。单元体上阻尼力所消耗的能量为
常应变状态和刚体位移。单元的形状越复杂,形函数的阶次就越高,单元适应能力就越强。 将式(7-23)写成矩阵形式,有
所以形函数矩阵为
u1
v1
q
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第三章用有限元素法建立结构振动的数学模型3.1 引言【工程要求】:对于简单的连续结构,如单件的杆、板、梁,可以建立结构振动的偏微分方程,但对于杆、板、梁组成的复杂结构,仍然采用建立偏微分方程的方法则十分困难。
如果用假设模态法(李兹方法),对实际工程结构假设出品质良好的整个结构的假设模态也十分困难。
要对结构振动进行数值分析,必须建立振动的数学模型——振动方程。
工程结构振动分析中,要采用将结构离散为有限自由度系统的方法——有限元素法,来建立结构的数学模型。
【发展简况】有限元素法,是在上一世纪五十年代中期,经过M.T.Turner及J.H.Argyris 等人的开拓性工作以及后来许多研究者的大量工作,发展起来的一种结构分析的有效方法,上一世纪六十年代初,由J.S.Archer及J.H.Argyris等人引入到结构动力学分析中来。
有限元素法发展到今天,已经非常成熟,而且与先进的计算机技术结合,已经形成了一个以有限元分析方法为基础的计算机辅助工程(CAE)的技术领域以及更进一步的虚拟产品设计(VPD)这样的先进概念。
世界上著名的CAE分析软件商主要有MSC.software和Ansys等公司的产品。
【有限元动力学分析的任务】在结构振动分析领域,有限元素法处理的问题主要是两类:结构固有振动特性计算和结构振动响应计算(包括频率响应分析与响应时间历程分析)。
两类问题中,用有限元法建立振动数学模型是最基础的工作。
【有限元素法(分析结构振动问题)的特点】:原则上,有限元素法由于其对复杂边界的适应性,它可以处理任何复杂的结构。
求解结果的精度可以根据需要不断改善,建模过程规范统一,计算形式适合于计算机求解。
【存在的问题】:随着精度要求的不断提高,所要求的计算机容量和计算时间急剧增加,从而引出了大型特征值问题的快速求解方法、将大型结构振动问题转化为若干小型结构振动问题集合的子结构求解方法,以及结构振动问题的并行求解方法等问题的研究。
【工程结构振动分析方法】从结构振动分析的发展历史看,经典的方法有:1.集中质量法——将质量分别集中在若干节点处,形成集聚质量阵。
结构的刚度仍然连续分布,采用材料力学中求柔度的方法,求出柔度系数,得到柔度矩阵,即用柔度法来形成刚度矩阵。
集中质量法存在问题:对大型复杂结构,用材料力学的方法,进行柔度矩阵的求解显然是不现实的。
2.假设模态法——以李兹法为基础,选择一组假设模态组成的模态矩阵,对结构进行离散,如第二章所述的方法。
假设模态法存在的问题:1.对几何形状复杂的结构,假设模态难以选择。
2.对整个系统用假设模态法得到的运动方程是高度耦合的,求解困难。
3.对不同的结构,要根据实际情况选取不同的假设模态,求解过程不规范统一。
引入有限元素法的思想既解决了上述方法的缺点,又保留了它们的优点。
【有限元法分析振动问题的基本原理】用有限元法分析结构动态问题的基本思想,与结构静态分析的思想是一样的。
它采用的方法仍然是:将结构分解为有限数目的单元,各元素间由节点相连,各单元内结构的变形用位移形函数(相当于元素级的假设模态)来表示,以节点位移作为控制变量(元素的广义坐标)。
元素间的位移连续条件通过引入的形函数来满足,动态平衡条件通过最后导出的有限元方程来体现。
由于节点数目是有限的,最后得到的方程是一个多自由度、离散的、线性的矩阵微分方程。
3.2 运动方程的建立仍然采用熟悉的拉格朗日方程法建立其数学模型(运动方程)。
对任一单元内部任一点的位移}{d 与节点位移}{δ的关系:}]{[][}{e T N w v u d δ==(3-1)[N]称为假设的已知位移形函数(可以看成是单元的假设模态,一般仍采用静态变形函数) 显然:}]{[}{e N dδ = (3-2)单元的动能:}]{[}{21}{][][}{21}{}{21ee T e e VT T e V T e m dV N N A dV d d A T δδδρδρ ===⎰⎰ (3-3)dV N N A m VT e ⎰=][][][ρ称为单元质量矩阵,质量阵是对称矩阵。
整个结构的动能为:}]{[}{21}]{[}{21q M q m T T T e e e T e e e ===∑∑δδ (3-4) }{q 是全结构的节点位移列阵,∑=ee m M ][][为全结构质量阵,∑e代表对整个结构各单元的组集(Assemble )。
单元的应变向量:}]{[}{e B δε=,}]{[}{εσE = (3-5)][B ——几何矩阵,][E ——弹性矩阵,}{σ——应力向量单元的势能为:}]{[}{21}){]][[][(}{21}]{[}{21e e T e eV T T e V T e k dV B E B dV E U δδδδεε===⎰⎰(3-6)全结构的势能:}]{[}{21}]{[}{21q K q k U U T e e e T e e e ===∑∑δδ (3-7)∑=ee k K ][][ (3-8)作用在单元上的分布力}{f 的虚功:⎰⎰==VT T e VT e dV f N dV f d W }{}{}{}{}{δδ (3-9)单元节点力(广义力)⎰=VT e dV f N p }{}{}{(3-10)全结构的外力虚功:}{}{P q W W T ee ==∑δδ(3-11)∑=ee p P }{}{ (3-12)【阻尼的处理】采用粘性阻尼假定:阻尼力与运动速度成正比,方向与速度相反。
单元中分布阻尼r 的耗散函数(瑞利耗散函数):}]{[}{21}{][][}{21}{}{21ee T e e VT T e T V e c dV N N r dV u u r R δδδδ ===⎰⎰ (3-13)耗散力(即瑞利耗散力)与耗散函数的关系为:}]{[}{}{e e ei eD c R Q δδ =∂∂=(3-14)全结构的耗散函数:}]{[}{21}]{[}{21q C q c R R T e e e T e e e ===∑∑δδ (3-15) ∑=ee c C ][][ (3-16)将全结构的动能、势能、耗散函数和广义力代入非保守系统的拉格朗日方程,),2,1()(N i Q qDq U q T q T dt d ii i i i ==∂∂+∂∂+∂∂-∂∂ (3-17)得到:}{}]{[}]{[}]{[P q K q C qM =++ (3-18) 【几个相关问题】:1.进行实际结构的振动分析时,在各个单元的矩阵组集之前,还要对单元矩阵进行由单元的局部坐标系向结构的总体坐标系转换。
记局部坐标系下节点位移向量}{e δ向总体坐标系下节点位移向量}{δ的转换阵为][e Γ,则坐标转换关系为:}]{][[}{δΓδe e e L = (3-19)其中][e L 为对单元矩阵组集时“对号入座”的定位矩阵。
]][][[][][][e e e T e T e L m L m ΓΓ= (3-20) ]][][[][][][e e e T e T e L k L k ΓΓ= (3-21) ]][][[][][][e e e T e T e L c L c ΓΓ=(3-22)][][][][e T e T e p L p Γ=(3-23)经过上述变换后的单元矩阵可以直接叠加得到结构总体矩阵。
2.为了求解结构的固有振动特性,需要求解无阻尼情况下结构的自由振动方程:}0{}]{[}]{[=+q K qM (3-24)将固有振动的简谐运动形式t q ωφsin }{}{=(3-25)代入得到的结构的特征方程:}0{}]){[][(2=+-φωK M 或 }]{[}{][φλφM K = (3-26)数学上构成所谓的广义特征值问题。
3.振动分析中采用的质量阵问题在结构振动分析中,常采用的质量阵形成方法有:集中质量模型和一致质量模型。
在采用集中质量模型时,一般是按照杠杆原理将单元质量向单元各个节点上进行分配,在局部转动效应显著时,还要考虑单元的转动惯量。
集中质量模型得到的质量阵为对角矩阵。
将单元内惯性分布视为与静力形函数同样规律的分布,导出的质量矩阵称为一致质量阵。
即上面(3-20)推导出的质量阵。
这样的质量阵为满阵。
注意:集中质量阵与一致质量阵都不是振动结构在实际上精确的质量分布模型。
理论上,结构的动位移是与频率相关的。
动位移在不同振动频率和振型下是不同的,即不同的频率对应有不同的惯性。
所以严格地讲,质量阵也是与频率相关的。
下面以轴向振动的杆元为例,说明这个问题。
作为连续体的二力杆元的振动偏微分方程(波动方程)为:02222=∂∂-∂∂tdx d E ρ (3-27) 记ρ/E c =称为波速,E ,ρ方程(3-27)的解为:t i e d d c x cLcxcLcxd ωωωωωω⎭⎬⎫⎩⎨⎧-=21]sincsc)sincos[(cos(3-28)故此时形函数为:]sincsc)sincos[(cos][cxcLcxcLcxN ωωωωω-= (3-29)代入单元质量阵公式得:x1d 2d⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=c L c L c L c Lc L c Lc L c L c L c L c L L c AL m ωωωωωωωωωωωωρcos csc cot 1cot1cos csc csc 2][(3-30)显然,这个质量阵为满阵,且各元素为与频率相关的量。
理论上这样的质量阵真实反映实际的惯性分布,计算得到的固有特性更精确,但却使计算大大复杂化,而且只有对简单的情况(如二力杆元)下,才能从偏微分振动方程得出(动力)形函数,因此,工程实际中很少采用这种方法。
而是采用与推导刚度阵时一致的(静力)形函数。
至于采用集中质量阵还是一致质量阵,得到的结果更好,没有固定的规律和结论,要视具体情况而定。
从一般经验上讲,在单元划分较细时,用集中质量阵较好,反之宜采用一致质量阵。
根据特征值隔离定理知道,采用一致质量阵分析得到的是固有频率精确解的上界,随着分元的细化,计算结果单调地向精确解逼近,而集中质量阵给出的结果就不具备这种特性,可能偏低也可能偏高。
从工程分析经验看,由于建立有限元模型的离散过程,已经使结构比实际结构的刚度增大,因此采用集中质量阵可能有时反而会得到误差较小的结果,但这需要经验和技巧。
但采用集中质量阵得到的振型一般误差较大,对振型要求较高时,还是宜采用一致质量阵。
集中质量阵是对角阵,在计算时可以节省计算时间。
我们希望能获得一种优于集中质量阵的对角化质量阵。
例如,对于梁的弯曲振动,可以按下式来计算对角化的非一致质量阵的单元:)4,3,2,1()())()((412020)(==∑⎰⎰⎰=r dyy N A dy A dy y N A mr r l l r l i rriiiρρρ (3-31)而非对角元全部置零,)4,3,2,1()(=r y N r 是梁的四个形函数。