分布交互仿真
分布式交互仿真
分布式交互仿真分布式交互仿真(DIS)是一种新兴的仿真技术。
它采用协调一致的结构、标准、协议和数据库,通过局域网和广域网将分散配置的武器装备仿真硬件、软件和仿真环境综合成为一个人可以参与交互作用的时空一致的共用仿真环境。
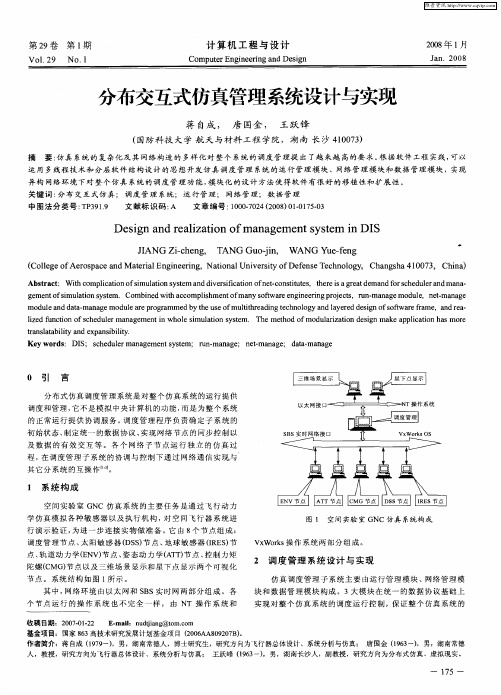
<br/> 从系统的物理构成来看,DIS系统是由仿真节点和计算机网络组成的。
仿真节点负责实现本节点仿真功能,包括动力学和运动学方程的求解、运动模拟、视景生成及音效合成、特殊效果(烟雾、爆炸和碰撞效果、风雨雷电等自然效果)合成、人机交互等。
分布在不同地域的仿真节点通过计算机网络连接起来,采用局域网、广域网、网关、网桥和路由器等互联设备连接这些节点。
<br/> 从组成单元的性质上看,可把DIS系统划分为以下三类节点: <br/> 虚拟的-包括各种类型的人在回路仿真器的计算机生成兵力,例如,计算机控制的飞机。
<br/> 结构的-包括高层集结模型、模拟军事演习和一些分析模型。
<br/> 真实的-包括实际的靶场和各种真实武器系统和仪表显示系统。
<br/> 分布式交互仿真的特点: <br/> 分布性-地域上分布的各仿真节点用网络连接,以实现共享一个综合环境。
DIS系统在功能和计算能力上也是分布的。
在DIS系统中,没有中央计算机,各仿真节点的地位是平等的。
DIS的各仿真节点具有自治性,即可联网交互运行,也可独立运行。
<br/> 交互式-首先是人在回路中仿真的互操作性,还包括各武器平台之间,武器平台与各种环境之间的交互作用,需要协调一致的结构、标准和协议。
<br/> 仿真性-分布式交互仿真包括三种类型的仿真: <br/> (1)真实仿真由实际的战斗人员使用实际的武器系统和保障系统,在尽可能真的作战环境中进行作战演习。
典型的例子是在美国国家训练中心进行的作战演习。
(2)虚拟仿真由实际作战人员操作仿真的武器系统进行的作战仿真。
分布交互仿真中的综合环境建模
进行分析和抽象 而建立数据表示模 型 , 井依 据此模型 以数据
的形式描述和表示 自然环 境 中的各种 对象 以及战斗 实体 的
对 于分布交互仿 真来说 , 其关键 就在 于高度互 操作性和
可重用性 。对 自然环境有一个通 用 、 确 、 准 全面 、 权威 的模型 描述和相应的表示 , 进而构建标准 的综合 自然环境 数据库不 仅是支持训练 、 析 、 分 测试等应 用的基础 , 而且也是 在异类联 网仿真 中获得互操 作性 和可重 用性 的必 要前提 :美 国国防
性、 多样性和有效性。完整性是指要能完 整地描 述战场 空 间 内 自然环境及 战斗实体 的全 部数据 , 并且 要保证所 有数据 的
一
综音环境 (y h i v啪r , Sn ec i r 简称 s) t t r E 包括两个 部分 ;
方 法 和过 程 。
此外 , 实现对 自然环境 的建模 及其相应 的环境数 据表示
和交换 , 立综 合环境数据库也是实 现仿 真系统 硬件 、 建 软件 、 数据库重用和共享 的基础 :
对 环 境 进 行 建 模 , 仅 要 完 整 而 准 确 地 描 述 和表 示 自然 不
综合环境建模 的 目标是实 现各种 自然环境 数据 的表示 、 交换 、 重用与共 享 , 而支 持各 种 训 练 、 进 分析 、 测试 等应 用 。 建模 的结果不仅要 保证能全 面 而清晰 的描述 和 表示战场 空 问 的 自然环境及战 斗实体 , 而且还要描述这 些对象之 间的关 系。同时, 综合环境的建模还要最大限度 的支持数据交换 。
ADS介绍

1. 为建模与仿真提供共同的技术构架;
2. 提供自然环境的及时、权威的描述;
3. 建立系统的权威描述;
4. 人的行为的权威描述;
5. 提供建模与仿真的基础设施,以满足开发者和最终用户的需要;
6. 推广建模与仿真,共享建模与仿真效益。
目标1至4的实质是建立可重用的仿真资源,目标5和6是保证这些资源确实能为用户使用。
DIS技术推出后很快应用于美军各兵种的仿真系统研究和开发,如美国海军的“作战部队战术训练系统(Battle Force Tactical Training System,BFTT)”、空军的“联合建模与仿真系统(Joint Modeling and Simulation System,JMASS)”以及STRICOM的“多兵种战术训练系统(The Combined Armys Tactical Trainer,CATT)”等。
此外,缩短复杂大系统仿真的时间、降低复杂大系统对人员素质的要求、提高仿真结果的可信性、减少人员投入以及降低管理的难度和成本等也是ADS要解决的问题,但这些问题可以认为包容在上面两个主要问题之中。
分布交互仿真的标准化研究
毕会娟,博士研究生,主要研究方向是分布交互仿真。
彭晓源,研究员,主要研究方向是分布交互仿真。
王行仁,教授,博士生导师,主要研究方向是分布交互仿真、虚拟现实。
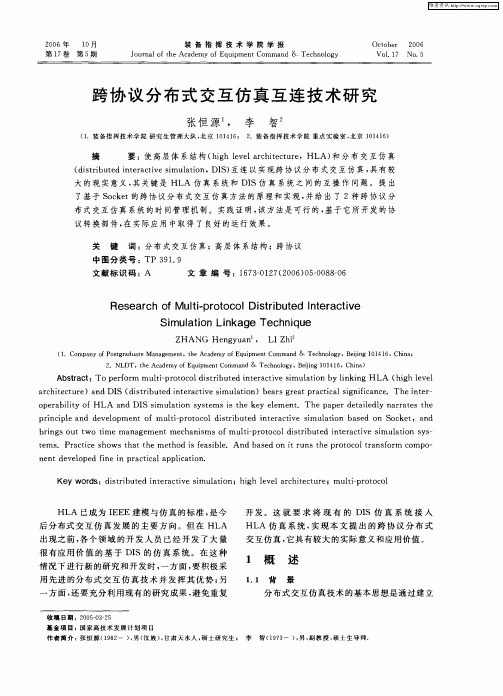
收稿日期:1998-09-25 第16卷 第1期计 算 机 仿 真1999年1月 分布交互仿真的标准化研究毕会娟 彭晓源 王行仁 (北京航空航天大学自动控制系,100083)摘要 针对DIS 的通讯层需求,本文结合网络实践,就如何采用通用的通讯协议(如TCP/IP 等)开发DIS 的通讯软件及提高DIS 网络的实时性等问题进行了讨论;在应用层,本文分析了DIS 应用层协议的演变过程,从DIS 标准化的角度研究分布交互仿真技术的发展趋势。
关键词 分布交互仿真(DIS ) 标准 网络 通讯协议1 引言在计算机技术和网络技术的发展过程中,都经历了一个从非标准化到标准化的过程。
为了能够实现最大限度的兼容和互联,人们制定了大量的计算机和网络技术标准,这些标准使计算机和网络技术得以进一步的发展和普及。
DIS 作为计算机技术和网络技术的一个应用领域,在其发展过程中也经历了类似的过程。
为了使不同时间、不同开发环境、不同操作系统和平台下开发的仿真应用之间能够实现交互,人们在进行DIS 开发时都遵循一些经过确认的约定,这就是一系列的DIS 标准。
DIS standards ,Recommendedpractices ,and related documentsIEEE Std 1278.1-1995,IEEE Stan 2dard for Distributed Interactive Simula 2tion Application Pro 2tocolsEnumeration and Bit Encoded Values for User with IEEE Std 1278.1-1995IEEE Std 1278.2-1995,IEEE Standard for Distributed In 2teractive Simu 2lation Commu 2nication ServicesIEEE P1278.3,Dratf ,Recommunded Practice for Distributed In 2teractive Simu 2lation -Exercise Man 2agement and Feedback图1 DIS 标准的组成DIS 标准的草稿由美国军方仿真、训练与装备司令部(STRICOM ,Simulation ,Training and Instrumentation Com 2mand )和国防建模与仿真办公室(DMSO ,Defense Modeling and Simulation Office )负责,并由美国佛罗里达大学的仿真与训练研究所(IST ,Institute for Simulation and Training )具体完成。
分布式交互仿真技术的理论与实现
分布式交互仿真技术的理论与实现谢宗蕻;乔新【期刊名称】《南京航空航天大学学报》【年(卷),期】1998(030)001【摘要】分布式交互仿真(简称DIS)是现代仿真科技的前沿课题之一,已广泛受到到以美国为代表的西方发达国家的高度重视,并开展了深入研究。
我国在该领域的研究才刚刚起步。
DIS是指运用计算机网络协议将分布于不同地域仿真模拟器连接起来,营造一个大范围的虚拟环境(LSVE)。
在这个环境下,分布于各地的用户可进行诸如空中格斗、空地对抗、地面对抗等各种军事模拟训练。
本文介绍了分布式交互仿真的发展历程与发展现状,分析了仿【总页数】9页(P81-89)【作者】谢宗蕻;乔新【作者单位】南京航空航天大学飞行器;南京航空航天大学飞行器【正文语种】中文【中图分类】TP391.9【相关文献】1.政治理论社团:高职院校思想政治理论课实现可持续育人的重要载体——以辽阳职业技术学院知行社团为例 [J], 杨延斌2.字符串加密技术的理论研究和技术实现 [J], 刘作军3.高职院校学生理论社团思想政治教育效能实现的基本路径——以佛山职业技术学院“理论学宣会”为例 [J], 何春霞;王勇4.信息技术和职业课程的深度融合研究——评《信息技术与课程深层次整合理论:有效实现信息技术与学科教学深度融合》 [J], 黄艳雁5.高等学校思想政治理论课是大学生思想政治教育的主阵地,更是在大学生中推进马克思主义大众化的主阵地。
由于当前思想政治理论课在亲和力方面还有欠缺,导致课堂效果不够理想。
因此,建议以课堂语言为突破口,从巧用多种形式的导入,借鉴、运用网络先进文化和多媒体技术等方面入手,实现课程优化。
[J], 余维海因版权原因,仅展示原文概要,查看原文内容请购买。
分布交互式仿真管理系统设计与实现
第 2 卷 第 1 9 期
VO. 9 12 N o. 1
计 算 机 工 程 与设 计
Co p trEn i e rn n sg m ue gn ei ga dDe in
20 年 1 08 月
Jn a .2 0 0 8
分布交互式仿真管理系统设计与实现
mo u ea dd t — n g d l a e r g a d l n a a ma a emo u e r o r mme yt eu eo mu t h e d n c n l g n y r dd sg f o t r a ,a dr a p db s f h ltra igt h oo ya dl ee eino s f i e a wa ef me n - l e l e u ci n o c e u e n g me t n wh l i lt n s s m . T eme h d o d lr a i n d sg k p l ai n h smo e i d f n t f h d lr z o s ma a e n o e smu a i y t i o e h t o fmo u a i t e i n ma e a p i to a r z o c
Ab t a t W i o l ai no smu ai n s s m n i e sf a i no n tc n t u e , t e ei a r a e n r c e u e n n - sr c : t c mp i t f i lto y t a dd v r i c t f e - o si t s h r e t ma df h d lr dma a h c o e i o t s g d os a
t saa it de p sbl . r ltb lya x a iit n a i n n i y
跨协议分布式交互仿真互连技术研究
A s r c :To p ro m u t p o o o i t i u e n e a t esm u a i n b n i g H LA ( i h l v l b ta t e f r m li r t c l s rb t d i t r c i i l t y l k n — d v o i h g e e
K y wo d :d s r b t d i t r c i e smu a i n;h g e e a c i c u e e r s it i u e n e a t i l t v o i h lv l r h t t r ;m u t p o o o e li r t c l —
Si l to n a e Te h i u mu a i n Li k g c n q e
ZH A NG e yu n H ng a 。 L1Zhi 。
( .C mp n fP sg a u t M a a e n 。 h a e f q ime tC mma d 8 Teh oo y e ig 1 1 1 , h n ; 1 o a yo o t r d ae n g me t t eAc d myo up n o E n L c n l ,B i n 0 4 6 C ia g j 2 .NL T。 h a e f q ime t o D t eAc d myo u p n mma d 8 Teh oo y B in 0 4 , h n ) E C n L c n l 。 e i 1 1 1 C ia g jg 6
维普资讯
20 0 6年 1 月 O 第1卷 第5 7 期
装 备 指 挥 技 术 学 院 学 报
J u n l ft eAc a e fE up n mma d & Teh oo y o n c n lg
HLA仿真

Stamp) LBTSi=min(Tj+Lookaheadj)
Lookahead FederateA (Regulating)
TSO Event
Current Logical Time FederateB (Constrained)
Federate Time Axis
Federate Time Axis LBTS
Subscribe Object Class Publish Interaction Class
功能简介 公布对象类
订购对象类 公布交互类
Subscribe Interaction Class …
订购交互类 …
对象管理
对象管理的主要内容
对象管理的基本概念 对象管理服务
对象管理的主要内容
HLA的基本思想
一直以来,建模与仿真领域存在这样的问 题:绝大多数仿真器的应用实现较为独立,仿 真器之间的互操作性和重用性差。而HLA就是 为了解决这个问题而提出的。 HLA是分布式交互仿真的高层体系结构, 它定义了联邦和联邦成员构建、描述和交互的 基本准则和方法,提供了一种通用的仿真技术 框架,从而便于联邦成员的集成,最终实现它 们之间的互操作性和重用性。HLA的一系列规 则已成为IEEE M&S的正式标准。
消息传递机制
消息传输方式: 可靠(reliable) 快速(best effort) 消息传递顺序: 接收顺序(Receive Order , RO) 时戳顺序(Time Stamp Order , TSO)
时间推进机制
时间受限成员
时间控制成员 时间前瞻量(Lookahead)
时戳下限值LBTS(Lower Bound Time
基于 的 分布式交互仿真设计
基于FCS的分布交互仿真系统的设计与实现

‘
套真正的分布式网络控制
平台。目前,在工业控制
-
成功的当属现场总线控制
文主要从此角度出发,介
N /N CC C实时多任务控制软件包、组态 软件和应用软件 。上位机的主要功能包 括系统组态、 数据库组态、 历史库组态、
图形组态 、控制算法组态 、数据报表组
) ) 构, 即采用虚拟 现 I 结 S
和计算机 网络技术,为武 供 一个分布、交互、实时
-
以利用 P C丰富的软硬件资源 。
() 3 系统的效率高。 在F S C 中, 台 一
境 ,先进的实时仿真建模 景仿真,分布交互仿真开
2 F S对计算机控制系统 的影响 .C
传统 的计算 机控 制系统 一般 采用 D S C 结构。在 D S中,对现场信号需要 C 进行点对点的连接, 并且I / 0端子与P C L 或控制仪表一起被放在控 制柜 中,而不
维普资讯
李玉华 等
本文作 者李玉华女士, 中国船舶工业总公司
第 70 l 研究所高级工程 师; 吴崦先生 ,工程 师 吴道 虎先生,华中科技大学博士后;郭江先生
; 仿真
系统设计
硬件 / 软件
和控制技术为一体,是一种全分散 、全
数字、全开放的当代最先进的计算机控
的基础,提高 了控制系统 的信息处理能 力和运行可靠性,节省了系统的硬件和 布 线费用 ,方便 了用户对 系统 的组态 、
管理和维护。
性 好, 更新换 代容易 。程序设 计采用 IC 13 — 5 国际标准编程语 言,编 E 6 13 种 1
程和开发工具是完全开放的,同时还可
分布式仿真高层体系结构(HLA)核心RTI测试与分析
摘要分布式交互仿真指采用协调一致的结构、标准、协议和数据库,通过局域网和广域网将分布在各地的各种仿真器互连,使人可参与交互作用的一种综合环境。
经过几十年的发展,分布式仿真技术目前已成功地应用于医学、军事、航空、设计制造业、建筑、教育及娱乐等众多领域。
同时对分布式仿真技术本身的研究也得到了广泛地开展,自从上世纪80年代以来逐步出现了SIMNET、ALSP、DIS、ADS等标准和技术,但是利用这些技术和标准开发的仿真应用只有有限的可重用性和互操作性,不能满足越来越复杂的作战仿真应用。
因此为了提高各种仿真应用的可重用性和互操作性,美国国防部于1995年发布了建模与仿真计划,决定在国防部范围内建立一个通用的开放的仿真技术框架,而HLA(High Level Architecture,高层体系结构)是此技术框架的核心。
在1996年8月美国国防部完成了HLA 标准的基础定义,并于2000年10月被IEEE接受为IEEE P1516、IEEE P1516.1、IEEE P1516.2系列标准。
HLA标准由规则、接口规范、对象模型模板三部分组成,而RTI(Run-Time Infrastructure,运行时底层结构)是实现HLA标准中接口规范的软件,它以类似于分布式操作系统为应用程序提供服务的方式给仿真应用提供了联邦管理、声明管理、对象管理、时间管理、数据分发管理、所有权管理和支持的服务等七组服务,但是RTI本身并不属于HLA标准。
目前有很多研究团体和个人致力于开发RTI软件,现有较为典型的RTI软件包括DMSO RTI,pitch 公司pRTI1.3、pRTI1516,MÄK RTI,以及北京航空航天大学的DVE_RTI等,但是这些RTI 软件往往不是共享或开放源代码的。
为了满足扩展性的需求,我们根据HLA 1.3接口规范标准自行开发了具有高度可扩展性的RTI软件CADRTI。
CADRTI作为一个软件产品,和其它所有的软件类似,有必要对它进行功能测试从而发现软件本身中的错误和缺陷,CADRTI开发者可以根据功能测试结果来改进软件本身。
计算机仿真综述
3.2.4 人在回路仿真
特征
专为操作人员的操作技能训练或指挥人员的指挥 决策能力训练而建立的仿真系统或用于有人操纵 的系统的设计、实验和评估 要求建立能够生成人的感知环境的各种物理效应 设备,包括生成视觉、听觉、触觉、动感、力感 等的设备,如视景系统、音响系统、运动系统、 操纵负荷系统、头盔、数据手套等 必须实时运行,必须满足仿真对象的相应特性、 人的生理特性和响应能力的要求,如视觉要求等, 特别要防止仿真病
(1)在方案设计阶段
①通过作战运用研究,评定战术技术指标的合理 性; ②论证战术技术指标的可行性; ③确定各分系统最佳指标并研究这些指标的协调 性、可行性; ④制导系统各模块功能的确定,作战体制研究, 作战软件编制等 ⑤控制系统设计; ⑥检验各种抗干扰措施的有效性; ⑦确定指控系统总体指标和方案; ⑧全系统功能仿真。
数学仿真(mathematical simulation) 硬件在回路仿真(hardware in loop simulation) 软件在回路仿真( software in loop simulation) 人在回路仿真(man in loop simulation)
11
3.2.1 数学仿真
特征
15
系 统 仿 真 的 分 类 图
16
3.3 建模与仿真
建模与仿真要求 仿真实验过程
进行实验
17
3.3.1 仿真模型的基本属性
相似性 对应性 重复性
18
3.3.2 仿真实验
符合仿真模型的基本属性 便于分析研究、参数优化 具备良好的人机交互界面
分布交互式仿真的发展历程和趋势
分布交互式仿真的发展历程和趋势摘要:21世纪信息时代,武器装备、作战方式和手段与以往相比都发生了日新月异的变化。
利用系统分析方法和建模与仿真技术,建立装备应用研究实验室,评估武器装备作战效能,研究和演示验证装备作战使用,优化武器装备使用方案,探索新的作战思想和方法,已成为各国装备发展与应用的必然趋势。
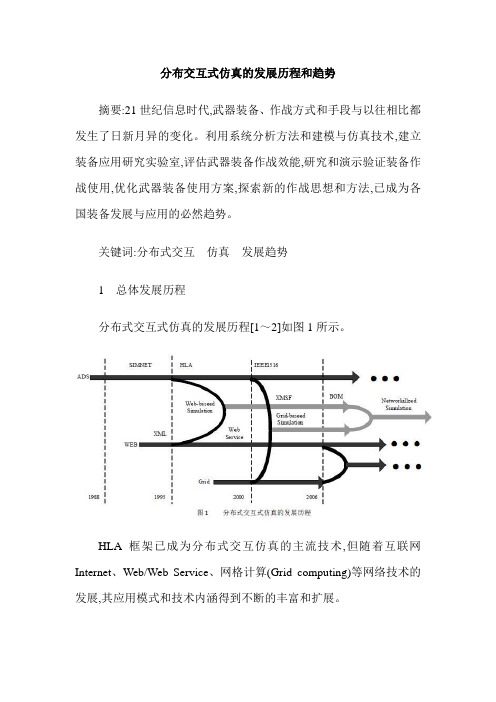
关键词:分布式交互仿真发展趋势1 总体发展历程分布式交互式仿真的发展历程[1~2]如图1所示。
HLA框架已成为分布式交互仿真的主流技术,但随着互联网Internet、Web/Web Service、网格计算(Grid computing)等网络技术的发展,其应用模式和技术内涵得到不断的丰富和扩展。
2 发展中遇到的问题随着Agent理论的逐渐成熟、Agent开发平台的逐渐应用于实际的开发,Agent技术在作战仿真的应用领域也逐渐展开,在国外已成功的应用于一些大型复杂的作战仿真系统,在国内,很多科研院所对Agent应用于作战仿真的理论进行了比较深入的研究,并开发了一些面向Agent的仿真平台,但还没有成熟的大型的面向Agent的作战仿真系统,尤其是Agent应用于装备作战仿真,在理论、建模和软件技术等方面都有很多问题亟待解决。
(1)作战Agent微观理论还有待创新和完善。
经典的BDI模型和VSK模型应用于装备作战仿真存在诸多的问题:传统Agent模型没有显式的描述作战Agent的命令特性,因而无法体现作战主体上下级的强制性和等级特性。
BDM模型采用命令所承载的内容“任务”代替传统模型的意图,体现了作战Agent的强制性,但是,使得作战Agent自身的自治性弱化甚至丧失。
半自治作战Agent体现了作战主体强制性和自治性相结合的特点,但现在还没有一套完整严谨的模型体系对其进行描述。
因此,如何结合传统Agent的微观模型,建立一个作战Agent 微观模型体系,既体现作战主体的强制性又体现其自治性,是Agent技术应用于装备作战仿真的理论基础。
分布交互仿真
分布交互仿真技术分布交互仿真技术(Distributed Interactive Simulation Technology)是一种将分布在不同地点的、自治的单一仿真系统,通过计算机网络连接成一个集数学仿真、半实物仿真和人在回路中仿真为一体的、交互式的仿真的技术。
分布交互仿真技术以计算机网络为基础,把分散在不同地点的软硬件设备及有关人员联系起来,生成人工合成的多武器平台这样一种电子环境,从而形成了一种虚拟的作战环境。
它是研究并建立系统的硬件或软件的有效模型,通过模型在实验系统上的运行来研究真实的或假想的动态系统在其所处的环境中的性能的技术。
这一技术的核心是分布、交互和仿真。
分布是指分布交互仿真系统中没有中央计算机,计算能力是分布的,而且,在地理位置上也是分布的,系统各个单元之间可以相隔很远的距离。
交互是指分布交互仿真系统中不同结点之间具有交互作用,人在回路中的仿真系统的互操作性,比如在武器仿真系统中的武器平台(飞机、导弹舰艇等)之间、武器平台与各种环境(地形、大气、海洋等)之间的交互作用。
仿真是指分布交互仿真系统以控制论、系统论、相似原理和信息技术为基础,以计算机为工具,建立系统的计算机模型,对系统进行实验研究。
分布交互仿真技术的发展: 1.>早期的分布交互仿真SIMNET。
80年代初,美国国防高级研究计划局和美国陆军共同制定了一项合作研究计划,即开发一个称为SIMNET的大规模交互战斗仿真网络,将分散在各地的多个地面车辆(坦克、装甲车)仿真器用计算机网络联系起来,用于对坦克乘员(以后推广到包括固定翼飞机和直升机驾驶员)和分队指挥员进行战术训练,也可以对单个武器系统的性能进行研究和评估,从而开创了分布交互仿真技术发展的新阶段。
SIMNET的特征是以分布式交互仿真、计算机综合形成的三维环境和虚拟战斗把成千上万的战斗人员“浸入”到一种由计算机产生的灵镜电子战场。
到1990年,这个系统包括了约260个地面装甲车辆仿真器和飞机飞行模拟器,以及通讯网络、指挥所和数据处理设备,这些设备分布在美国和德国的11个城市 2.>分布交互仿真的标志Digital Information System(DIS)将现代化测量技术和计算机结合,可以直接测量多种物理量(如距离、位移、瞬时速度、平均速度、力、温度、压强、电压、电流强度)的现代化测量仪器。
仿真技术
发展系统仿真技术摘要:介绍了我国仿真技术的发展过程及美国科学局为建立集成的综合仿真环境和仿真系统归纳的五个层次的使能技术。
着重探讨了模型的校核,验证与确认,环境仿真,分布交互仿真和虚拟技术等关键技术,最后,结合国外应用仿真技术要解决的难题和我国目前的实际情况,提出了发展系统仿真技术的几点看法。
关键词:模型校核;建模;验模;环境仿真;分布交互方真;虚拟技术1概述在纪念中国科协成立40周年大会的主报告中指出:“人类距离新的世纪和新的千年越来越近,新世纪的曙光已经在全球显现,这个曙光就是以空前速度和巨大规模发展的世界科学技术与人类社会对科学技术需求的结合和统一。
当各国政治家、科学家用信息时代、生命科学世纪、知识经济等名词来描绘21世纪的根本特征时,无不意味着对科学技术在未来经济社会发展和人类文明进步中所处关键地位的战略思考。
在自然科学、技术科学、工程技术的领域里,各门学科在继续向微观和纵深发展的同时,也将从宏观、全局的角度加以综合;在科学与技术之间,各门学科及其分支学科之间,相互交叉、渗透、融合将成为发展的主流,从而使整个自然科学、技术科学、工程技术向综合集成和整体化方向发展,在认识自然界和人的思维规律上达到前所未有的高度”。
仿真技术综合集成了计算机、网络技术、图形图像技术、多媒体、软件工程、信息处理、自动控制等多个高新技术领域的知识。
仿真技术是以相似原理、信息技术、系统技术及其应用领域有关的专业技术为基础,以计算机和各种物理效应设备为工具,利用系统模型对实际的或设想的系统进行试验研究的一门综合性技术。
仿真技术的应用已不仅仅限于产品或系统生产集成后的性能测试试验,仿真技术已扩大为可应用于产品型号研制的全过程,包括方案论证、战术技术指标论证、设计分析、生产制造、试验、维护、训练等各个阶段。
仿真技术不仅仅应用于简单的单个系统,也应用于由多个系统综合构成的复杂系统。
我国仿真技术的研究与应用开展较早,发展迅速。
分布式交互仿真中的网络安全平台的设计与实现
发展之势 。尤其军事应 用的环境 中 . 如何 确保 网络 系统 的安
全已经成为急需解决的问题 。为此 , 针对军用仿真领域 , 我们 提出了仿真安全平台的解决方案 。
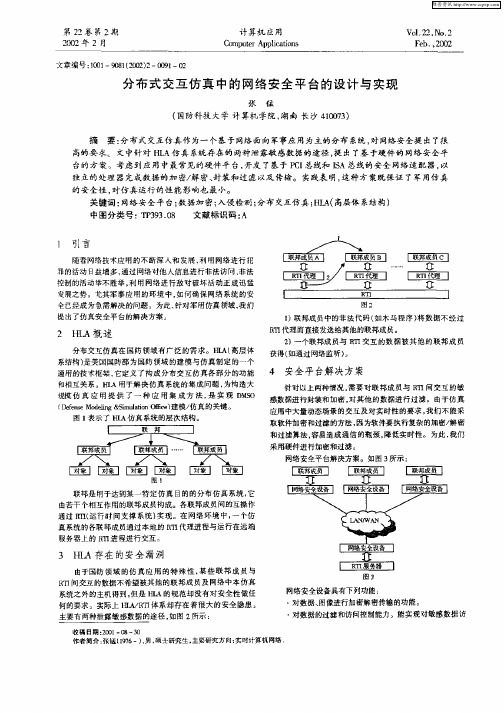
2
1 )联邦成员中的非法 代码 ( 如木 马程序 ) 将数据 不经过 RI T 代理而直接发送给其他 的联邦成员。 2 )一个联邦成员与 R I T 交互 的数 据被其 他的联 邦成 员
维普资讯
9 2
问身 控制管理 , 能实 现对敏感数 据的过滤功 能。 匀 也
计 算机应 用
20 血 02
网络接 1部分完成实 际的数据接 收和 发送 , 成诸如计 2 1 完
算校验 和( hcsm)舔加前导码 (ra b ) C eku 、 Pem l 以太帧起 始界定 e 符( D 等帧头形 成有 效的网络数据 帧 、 据的串行化发 送 : S ) T 数 接收数据 , 检验数据帧 的有效 陛、 行地址 匹配, 进 最后把 台{ 击
、
的数据帧 内容通过中断通知前端处理器接收。
对于采用 其它工业 总线 的工作 站或服务 器, 我们开 发 了 与设备无关 的安全网络节点 这些网络安全设备均有 一个共 同特点 : 均有一个 C U. P 数据的加 密/ 密 、 解 封装和过滤以及传 输都 由谤 C U来 完成 它具有如下优点 :)应用无关性 其 P 1 与高层 应用无关 , 网络用户透明 , 户感觉 不到它的存 在 } 对 用 2 协议无 关性 。主机上运行的所有协议标准它均 支持 ;)可 ) 3 扩展性 。设备 中运行的加密/ 密算 法可根据用 户的需要 方 解 便地进行更挠 , 也可 根据用 户的需求增 加新 的功能 ; )提 4 高主机 的性能 ;不会给主机带来 了额外 的开 销 , 影响 主机 的 性能 , 相反它能对 网络 中流经 主机 的数据根据用户 定 义的规
基于B/S模式的分布交互式仿真系统的研究
关键 词: 火电机 组仿 真; 浏 览器/ 务器; 分布 交互式仿 真; 控件 ;模 式;体 系结构 服
中图法分类号 : P l;T 3 1 T 3 l P 9
文献标识 码: A
文章编号 : 0072 (0 7 2 .0 00 10 .0 4 2 0) 46 2 .3
Re e r h o itiu e tr ci esmu ai nb s d o S mo e s ac n d s b tdi e a t i lt a e n B/ d r n v o
针 对 目前 火 电机 组 的仿 真 运 行 模 式 , 于 B S 式 和 分 布 交 互 式 , 出 了一 种 新 的仿 真 设 计 思 路 和 方 法 , 出 了 基 于 We 基 /模 提 给 b的 分 布 式 仿 真 系统 的 体 系 结 构 , 决 了以 往 发 电机 组 仿 真 运 行 数 据 难 以 用 图 形 界 面 形 式 进 行 远 程 控 制 的 问题 。 对 该 方 法 进 行 解 可行 性 认 证 , 明 了其 的有 效 性 。 证
S in qa g HI a — in J
( e a met f i l in Naj gIstt o T cn l y N n n 10 3 C i ) D p r n Smua o , ni tu f eh o g , aj g2 0 1, h a t o t n ni e o i n
维普资讯
第 2 卷 第 2 期 8 4
VO . 1 28 N O. 4 2
计 算 机 工 程 与 设 计
Co mp t r g n e i g a d De i n u e En i e rn n s g
20 年 l 月 07 2
分布式交互仿真技术
FOM是一个联邦的共同词汇表,它描述联邦成员向联邦中其它
成员展示的对象和交互。
规则 2 :在联邦中,所有和仿真有关的对象实例的描述应该在联邦成员中, 而不在RTI中。 因此RTI服务对仿真互操作是通用的服务,RTI不用修改就可以应用于各种 不同的仿真应用领域。 这条规则也说明RTI不保存联邦和联邦成员状态,任何RTI的实现只保存和
这条规则确认了接口规范在 HLA中的位置。这使联邦成员与不同的 RTI软件的特
殊性隔离开,使得一个RTI的实现能被另一个RTI的实现成功地替换。
规则5. 在联邦执行过程中,在任何一个时刻,一个实例属性将最多只能由一个 联邦成员拥有。
谁拥有一个实例的属性谁就负责更新它,如果联邦成员不拥有实例属性,其任何
3)接口规范。定义联邦成员与联邦中其他成员进行信息交互
的方式,即RTI的服务。其定义了RTI的六大管理功能。
对象模型模板
HLA是一个开放的体系结构, 其主要目的是促进仿真系统 间的互操作性、提高仿真系统及部件的重用能力。为了 达到这两目标, HLA要求采用对象模型来描述联邦及联邦 中的每一个联邦成员。该对象模型描述了联邦在运行过 程中需要交换的各种数据及相关信息。 HLA 规定必须用 一种统一的表格———对象模型模板OMT来规范对象模 型的描述,如下页图表所示:
它服务有关的状态,当它需要实例的属性值和参数时,它总是依赖联邦成 员来提供。
HLA规则
联邦规则
规则3:在联邦执行过程中,在联邦成员间所有FOM数据的交换应该通过 RTI来实现。 它保证了仿真组件能互操作和可重用,RTI不能被联邦成员绕过,这样所 有联邦成员的交换都是可重用的。
分布式交互虚拟仿真飞行训练平台的设计与实现
缺乏对 通 用 性 平 台 的研 究 。开 发 人 员 开 发 任 何 一 装备 的仿 真 训 练 系 统 都 需 要 进 行 基 础 性 技 术 的研
究与设 计 , 视 景 技 术 、 互 技 术 、 统 实 时 性 技 如 交 系 术 , 样会 造成 大量 的人 力 资 源 的 浪 费 。正是 在 此 这 需 求下 , 文基 于 C M 和 P U I 术设计 并 实现 本 O L G N技 了一种 分 布式虚 拟仿 真 飞 行 训 练 通用 平 台 , 过 综 通
训练。
然 而 , 多是 针对 具 体 案 例 、 体设 备 的研 发 , 大 具
21 0 0年 2月 1日收到
原则 主要 完 成 虚 拟 环 境 的 建 立 与 显 示 。因 此 主 要 包括 三个部 分 : 景 和 虚 拟 仪 表 组 件 、 据 池 P U 视 数 L— G N、O K T组 件 。人机 交互 界 面通过 菜单 和 快捷 I SCE
和 中小 型 飞 行 训 练器 的 快 速 开 发 。
关键词
分布式
HL A
实时交互
C M 组件 O
A
P U I L GN
中图法分类号
T 3 1 9; P9 .
文献标志码
2 0世 纪 9 0年 代 以来 , 系统 仿 真 技 术 和 虚拟 以 现实技 术为 特征 的虚 拟 仿 真训 练 渐 露 头 角 , 具有 它 安全 、 可控 、 受 环 境 限制 、 成 本 和 高 效 率 等 特 不 低 点 l 。特 别是 由 于 当前 武 器 装 备 日趋 复 杂 和 兵 器 1 J 采 办 费用 的不断提 高 , 界 各 国均 将 虚 拟 仿 真训 练 世 视为必 不可 少 、 经 济 有 效 的军 事 训 练手 段 。 国 内 且
分分布交仿真
1、分布交互仿真系统体系结构研究与设计
分布交互仿真系统的面向对象特性 分布交互仿真系统体系结构的概念 分布交互仿真典型应用系统的体系结构 分布交互仿真系统体系结构的特点 分布交互仿真系统体系结构设计
l 对远程结点仿真实体的某个属性,在上一次收到的该实体同一属 性的值的基础上,采用DR模型进行外推,在收到下一次该实体状态 的更新值后,再对给实体属性的DR模型进行更新
— DR算法公式:
l 一阶、二阶、三阶;定步长和变步长
l 阈值,阶数
时空一致性问题的解决方案——外推算法
分交互仿真系统体系结构的概念
体系结构的分类
— 网络体系结构:规定物理上的流通和网络协议(网络拓扑结构和硬 件环境)
— 数据体系结构:解释网络上流通的数据内容(协议、标准) — 软件体系结构:规范使用网络和产生数据的应用软件(支撑环境和
应用模型)
体系结构的发展
— SIMNET、DIS——互操作性——协议标准:缺乏可重用性、可伸缩 性
xt ytzt
导弹弹体
6
系
X t ,Yt , Z t
直角
x to y to z to
t ( x ), t ( z ), t ( y )
地面 系
X 向前 Y 向上 Z 向右
7
, ,h
经纬系 Geodetic
, ,h
极坐标
地形系
X g ,Y g , Z g
8
xg yg zg
Topograph
ic
时空一致性问题(1)
时空一致性定义
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
军事仿真技术面临的挑战
• 仿真对象的复杂性--作战系统是一种复杂的
动态随机系统,规模大、结构复杂、分散化、 不确知性等等
• 军事需求问题--未来的作战仿真必将广泛的
采用分布式仿真技术,它要求能够集成多个部 门开发的不同类型的仿真应用,能够实现“真 实仿真”、“虚拟仿真”、“构造仿真”的无 缝联结。
分布交互仿真概述
系统仿真技术的产生
• 20世纪80年代以来,随着世界范围内冷战
的结束,各国政府纷纷把投资重点转向经 济建设,大量消减军费开支;军事演习不 仅受政治环境的影响,同时还受到经济条 件的制约。因此,以某种有效的经济的方 式进行军事演习、训练与武器系统研制就 成为各国军方摆脱困境的途径。发展系统 仿真技术就是一种很好的方法。
DIS逻辑拓扑结构
仿真应用
仿真应用
仿真应用
仿真应用
仿真应用
仿真应用
DIS体系结构的特点
• 自治的仿真应用负责维护一个或多个仿真
实体的状态
• 用标准PDU传送数据 • 仿真应用负责发送仿真实体的状态和交互
信息
• 由接收仿真应用来感知事件或其它实体的
存在
• 用DR算法来减少网络中的通信负荷
HLA中的基本概念
• RTI先判断服务请求所要求的通信机制,最
后按照所要求的通信机制与相应的仿真应 用通信
HLA的体系结构特点
• 仿真应用之间不直接通信,所有网络通信
功能集中由RTI实现
• 仿真应用向RTI发出某种接口服务的功能调
用,RTI根据各个仿真应用的需求,调度系 统中的数据分布
• RTI先判断服务请求所要求的通信机制,最
抗交互
• 仿真性(Simulation) • 实时性(Real Time) • 集成性(Integration) • 没有中央计算机控制整个仿真演练 • 使用DR算法来减少通信负荷
分布交互仿真的关键技术
• 体系结构 • 信息交换标准 • DR机制 • 时钟同步技术 • 接口处理机制 • 计算机生成兵力(Computer Generate Forces) • VVA(Verification,Validation and Accreditation) • 仿真管理技术
• 技术需求问题--体系结构的开放性、系统的
可扩展性、子系统的互操作性、仿真组件的重 用性、模型表达的复杂性、时空和逻辑的一致 性、浸入式人机交互式仿真机制、融合多种模 式的时间管理机制、辅助建模工具的不充分性 和理论与方法研究相对于工程实践的滞后性
分布交互仿真的体系结构及通 信机制
DIS的几个基本概念
后按照所要求的通信机制与相应的仿真应 用通信
RTI完全分布在各主机中
仿真主机
仿真应用
程序接口 驻留RTI程序
仿真应用
程序接口 驻留RTI程序
仿真主机
RTI
驻留RTI程序
程序接口
仿真主机
分布交互仿真的分类
从系统的物理构成来看,DIS系统是由仿真节 点和计算机网络组成的
从组成单元的性质来看,DIS系统划分为以下 三类仿真:
• 虚拟(Virtual)仿真 • 构造(Constructive)仿真 • 真实(Substantive/Live)仿真
分布交互仿真的特点
• 分布性(Distributed)-地域、任务、系统 • 交互性(Interactive)-人机交互和作战时的对
规定联邦的数据交换, 在SOM和FOM中定义数
在接口控制文件中说明,
据通信格式
但没有标准格式
网络接口按IEEE1278-2
由AIS(ALSP
由RTI(Run-Time
标准
Infrastructure Software) Infrastructure)提供网
提供网络接口
络接口
实时仿真
守恒的时间管理模式 多种时间的管理模式
• 仿真实体、仿真结点、仿真应用、仿
真管理计算机、仿真演练和仿真主机。
DIS中的几个基本概念及其相互 关系
仿真应用1
仿
真
仿真实体1
仿真实体n1
管 理
软
件
仿真主机1(仿真管理计算机)
DIS网络
仿真结点
仿真结点
网络交换设备1
仿真应用1
仿
真
仿真实体1
仿真实体nm
管 理
软
件
仿真主机n
仿真结点
仿真结点 网络交换设备k
系统仿真技术的优点
• 经济性 • 安全性 • 不受天候场地限制
分布交互仿真的产生
• 传统的单台仿真器解决了单个成员的训练
问题,但不能很好的满足协同、分队战术 等高级训练任务的需求。为了更好的满足 更高层次的需求,必须使仿真器从单台独 立运行模式向联网交互运行模式发展,正 是这种网络化需求产生了分布交互仿真 (distributed interactive simulation,简称 DIS).
•
HLA的研究使用阶段
DIS、ALSP、HLA的综合比较
DIS 平台级建模(已连续系
统为主)
虚拟仿真/实况仿真
ALSP 聚合级建模(以离散事
件பைடு நூலகம்统为主)
构造仿真
HLA
平台级和聚合级建模 (包括连续系统和离散
事件系统)
虚拟仿真/构造仿真/实 况仿真
广播式通信/点对点通 信
广播式通信
一点对多点通信
数据通信PDU规范 (1278-1)
联邦成员、联邦、联邦执行、管里联邦成 员、运行时间框架(RTI)
HLA逻辑拓扑结构
仿真应用
仿真应用
仿真应用
运行时间框架(RTI)
仿真应用
仿真应用
仿真应用
HLA的体系结构特点
• 仿真应用之间不直接通信,所有网络通信
功能集中由RTI实现
• 仿真应用相RTI发出某种接口服务的功能调
用,RTI根据各个仿真应用的需求,调度系 统中的数据分布
对交互操作的支持水平与训练时的设定严格一致。
分布交互仿真的发展
自从1983年,美国国防部高级研究计划局(DARPA) 和美国陆军共同制定的SIMNET研究计划启动以来, DIS技术走过了四个主要阶段:
•
SIMNET的研制阶段和使用阶段
•
DIS阶段
•
ALSP(Aggregate Level Simulation Protocol)阶段
分布交互仿真
• DIS就是在SIMNET(Simulation Network)的基础上
产生的。DIS是一种基于计算机及高速通信网络的 仿真训练系统,它将分散于不同地点、不同类型 的仿真设备或系统集成为一个整体,使之相对于 每个用户皆表现为一个逼真的浸入环境,并在此 环境下支持高度的交互式操作。
• 所谓“高度的交互式操作”,是指DIS的虚拟环境