《机械原理》-第七章-哈工大精品课程
哈工大机械设计制造及其自动化专业课程介绍
机械设计制造及其自动化专业课程介绍默认分类 2010-04-24 11:35:19 阅读61 评论0 字号:大中小订阅作者:船舶学院时间:2009-6-16 14:40:51“机电系统计算机控制”教学大纲(PUTER CONTROL OF ELECTRICAL MACHINE SYSTEMS)大纲编制:李哲教研室主任:李哲课程编码:课程名称:机电系统计算机控制教学性质:选修课适用专业:机械及近机类专业学时:30(26/4)学分:1.5一、课程的性质、目的与任务本课程是适应机电一体化的发展趋势而设立的,是机械设计制造及自动化专业的一门主干课程,主要讲述直流电机、交流电机控制系统,液压伺服控制系统和气压传动控制系统,通过这门课让学生掌握机电液气系统的设计和应用。
二、课程的基本要求本课程主要讲授内容有直流、交流电机的组成、原理、动态特性及其应用,液压伺服系统设计与气压传动系统设计;要求学生掌握机电液气系统的组成、分类,分析和设计;了解各自的特点和应用场合;具备分析机电液气系统和设计简单的机电液气系统的能力,为进一步学习深造和适应未来的工作奠定基础。
三、本课程与相关课程的联系与分工相关课程有:电工学、模拟电路、自动控制原理、液压传动;电工学、模拟电路、自动控制原理等课程作为本课程的基础课。
液压传动课程侧重于讲述液压传动系统,本课程侧重于液压控制系统。
四、教学大纲内容使用教材与参考教材1、使用教材:(骆涵秀主编机电控制 XX大学 2000年1月)2、参考教材:(李洪人液压控制系统国防工业)(邓星钟机电传动控制机械工业)(朱善君可编程控制器系统原理应用维护清华大学)五、教学大纲内容及学时分配第一章概述(2)本章主要内容有:分别用实例引出机电、液压、气动控制系统的整体组成,功能和特点;要求学生掌握机电液气系统的组成;了解机电液气系统的发展方向和选用原则。
第二章直流电机(4)本章主要内容有:直流电机的原理,动态特性分析和系统应用;要求学生掌握直流电机的机械特性和系统应用;了解直流电机的原理、组成。
最新理论力学第七章点的合成运动(哈工大第七版版)

车刀刀尖的运动
相对某一参考体的运动可由相对于其他参考体的几个运 动的组合而成-合成运动。
§7-1 相对运动·牵连运动·绝对运动 定坐标系(定系)
两个坐标系 动坐标系(动系) 绝对运动:动点相对于定系的运动。
三种运动 相对运动:动点相对于动系的运动。 牵连运动:动系相对于定系的运动。
v r v a 2 v e 2 2 v a v e c6 o 0 3 . s 6 m s
arcvsesiin 6n (0 )46 12
vr
例7-6 已知:圆盘半径为R,以角速度ω1绕水平轴CD转动, 支承CD的框架又以角速度ω2绕铅直的AB轴转动,如图所示。 圆盘垂直于CD,圆心在CD与AB的交点O处。
OA=r,两轴间距离OO1=l。求:曲柄在水平位置时摇杆的
角速度w1。
解: 1.动点:滑块 A 动系:摇杆 O1B
OA l2r2
2.运动分析:
绝对运动-绕 O 点的圆周运动;
相对运动-沿O1B的直线运动;
牵连运动-绕 O1 轴定轴转动。
3.
vavevr
大小 rw ? ?
方向 √ √ √
vevasijnrw
2.绝对运动:直线运动(AB)
相对运动:圆周运动(半径R)
牵连运动:定轴运动(轴O)
3.
va ve vr
大小 ? wOA ?
方向 √ √
√
vaveco twOO A e A we
例7-5 已知:矿砂从传送带A落入到另一传送带B上,如图所示。
站在地面上观察矿砂下落的速度为 v1=4m/s ,方向与铅直线成30º 角。传送带B水平传动速度 v2=3m/s 。 求:矿砂相对于传送带B 的速度。
哈工大机械原理全部课程

平面运动副
规格严格 功夫到家
移动副
转动副
三、运动链与机 构
开式运动链
闭式运动链
规格严格 功夫到家
机构
四、机构运动简图 的绘制 为了便于研究机构的运动,可以撇开构件、运动副的
外形和具体构造,而只用简单的线条和符号代表构件和运 动副,并按比例定出各运动副位置,表示机构的组成和传 动情况。这样绘制出能够准确表达机构运动特性的简明图
构件独立运动的数目称为自由度
对构件运动的限制作用称为约束
y
y
x
x
规格严格 功夫z 到家
z
(2)机构自由度 机构独立运动的数目称为机构的自由度 什么是独立运动?
规格严格 功夫到家
什么是机构的独立运动? 规格严格 功夫到家
什么是机构的自由度? 机构的自由度=机构的独立运动数目 平面机构独立运动的数目为:所有活动构件的自由度的
安装 铣刀
工作台
锯床
并联机床原型机
数控剪板机
数控压弯机
主旋翼
尾 旋 翼
美国西科斯基公司生产的 “黑鹰”直升机
“神舟五号”发射时的情景。发射塔、 运载火箭都是庞大的机器。
索杰纳火星车
它是美国国家航空航 天局于格林威治时间 1997年7月4日17时07 分发射的火星探路者 号宇宙飞船成功地在 火星表面着陆,该飞 船携带了索杰纳火星 车,这也是一种机器。
机械原理
全套课件
哈尔滨 2020年9月
机械原理
第一章 绪论
规格严格 功夫到家
哈尔滨工业大学
§1-1 机械原理课程的研究对象与内容
研究对象:
机器 机 械
机构
机械是机器与机构的总称。 什么是机器呢? 什么是机构呢?
哈工大机械原理课程设计-产品包装线(方案3)
哈工大机械原理课程设计-产品包装线(方案3)一、引言本文档以“哈工大机械原理课程设计-产品包装线(方案3)”为标题,介绍了一种产品包装线的设计方案。
本文档使用Markdown文本格式输出,共计1200字。
二、设计背景随着工业发展的需要,高效率、自动化的产品包装线的需求越来越大。
因此,本文设计了一条适用于产品包装的生产线,旨在提高生产效率,降低劳动成本,并确保产品包装的质量。
三、设计方案本方案的产品包装线主要包括以下几个部分:1. 传送带系统传送带系统是产品包装线的核心部分,用于将待包装的产品从生产线的起始点运输到包装区域。
传送带系统采用带有调速装置的传送带,可以根据不同的产品包装需求进行调整,确保传送带的速度与生产线的节奏相匹配。
2. 包装机械包装机械是产品包装线的重要组成部分,用于将产品包装成统一的标准形式。
包装机械可以根据产品尺寸、形状等特征进行调整,以保证包装的质量和一致性。
同时,包装机械还应具备自动化控制功能,能够与其他部件协调工作,实现高效的包装过程。
3. 检测系统为了确保产品包装的质量,本方案中设计了一个检测系统,用于检测产品包装是否符合规定的标准。
检测系统可以采用视觉识别技术,通过摄像头等设备对产品包装进行扫描和分析,以实时监控包装过程中的异常情况,并及时作出处理。
4. 机械臂系统机械臂系统是产品包装线的灵活部分,用于处理特殊情况和需求。
机械臂可以根据需要进行调整和操作,如对特殊形状的产品进行定位和放置,或对包装过程中的异常情况进行处理。
机械臂系统应具备高精度、高稳定性和高可靠性的特点,以确保产品包装的准确性和一致性。
5. 控制系统控制系统是产品包装线的核心部分,用于对整个包装过程进行控制和调度。
控制系统可以与其他部分进行数据交换和通信,并根据相应的算法和逻辑进行决策和调控。
控制系统应具备实时性和灵活性,能够适应不同产品包装需求的变化。
四、总结本文以“哈工大机械原理课程设计-产品包装线(方案3)”为题,介绍了一种适用于产品包装的生产线的设计方案。
哈工大机械原理课程设计示范(棒料布料装置)
机械原理课程设计
一、题目的重述
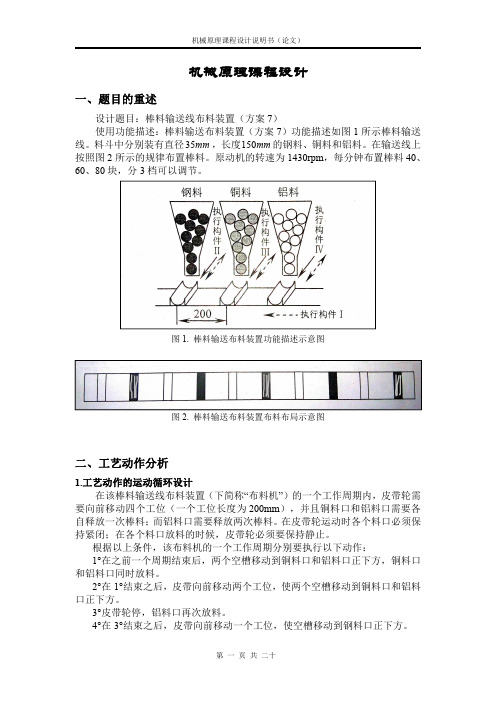
设计题目:棒料输送线布料装置(方案 7) 使用功能描述:棒料输送布料装置(方案 7)功能描述如图 1 所示棒料输送 线。料斗中分别装有直径 35mm ,长度150mm 的钢料、铜料和铝料。在输送线上 按照图 2 所示的规律布置棒料。原动机的转速为 1430rpm,每分钟布置棒料 40、 60、80 块,分 3 档可以调节。
图 9. 此布料机的原动机运动拟定方案
(2)一级减速及过载保护 一级减速及过载保护机构采用传动比为 2.5 的皮带轮与皮带,示意图如下:
图 10. 此布料机的一级减速机构及过载保护装置运动拟定方案
(3)二级减速及调速机构 二级减速及调速机构采用由三对滑移齿轮构成的滑移齿轮组,示意图如下:
第 八 页 共 二十 页
机械原理课程设计说明书(论文)
图 11. 此布料机的二级减速机构及转速调控装置运动拟定方案
(4)三级减速及运动分支点 三级减速及运动分支点采用一个定轴轮系加以实现,其示意图如下:
图 12. 此布料机的三级减速机构及运动分流装置运动拟定方案
(5)执行机构 I 规定运动的实现 4 中的运动分支点通过一个圆锥齿轮及其连轴曲柄-槽轮机构输出动力,再通 过与槽轮机构连轴的皮带轮进行传动,完成执行机构 I 规定的单向间歇直动工艺
图 1. 棒料输送布料装置功能描述示意图
图 2. 棒料输送布料装置布料布局示意图
二、工艺动作分析
1.工艺动作的运动循环设计 在该棒料输送线布料装置(下简称“布料机”)的一个工作周期内,皮带轮需
要向前移动四个工位(一个工位长度为 200mm),并且铜料口和铝料口需要各 自释放一次棒料;而铝料口需要释放两次棒料。在皮带轮运动时各个料口必须保 持紧闭;在各个料口放料的时候,皮带轮必须要保持静止。
机械原理课件 第7章 机械的运转及其速度波动的调节 西工大版
n
i
Si mi JSi vSi
i
§7-2 机械系统的等效动力学模型
(1)等效质量和等效转动惯量 (续)
若等效构件为转动构件,角速度为 ,其对转轴的假 想的等效转动惯量为Je ,根据动能等效的原则,可得:
n 1 1 1 2 2 E J e mi vSi J Sii2 2 2 i 1 2
于是:
2 vSi 2 i J e mi J Si i 1 n
(7-17)
若等效构件为移动构件,速度为v,其具有的假想的 等效质量为me ,仿照上述推导过程,可得:
主编主编葛文杰葛文杰theorymechanisms第七版第七版西北工业大学机械原理及机械零件教研室机械的运转及其速度波动的调节71概述72机械系统的等效动力学模型73机械运动方程式的建立及求解74稳定运转状态下机械的周期性速度波动及其调节75机械的非周期性速度波动及其调节学习要求作业解析学习要求基本要求掌握等效质量转动惯量等效力力矩等效构件和等效动力学模型等基本概念和相应计算方法
式中:当Mi 和 i 同方向时取正号,否 机械运动方程的一般表达式: Mi i 则取负号。 n n 1 1 2 2 d mi vSi J Sii Fi vi cos i M ii dt 2 i 1 i 1 2
v Fe Fi cos i i M i i v v i 1
Fd Fd
C
O Md
Md
s
弹簧
φ
O Md 内燃机
O
直流并激电动机
哈工大机械原理课程设计
Harbin Institute of Technology课程设计说明书课程名称: ______ 机械原理课程设计______设计题目:棒料输送线布料装置(方案8)院系:机电工程学院班级:1208105设计者:殷琪学号:1120810529指导教师: _______________________设计时间: __________ 2014627哈尔滨工业大学14 目 录机械原理课程设计任务书 .......... . (1)一、 题目要求 ...................................................................... 2 二、 机械系统工艺动作分析 .......................................................... 2 三、 机械系统运动功能分析 .......................................................... 3 四、 系统运动方案拟定 .............................................................. 5 五、 系统运动方案设计 .............................................................. 8 六、系统运动简图•棒料输送线布料装置(方案8)一、题目要求已知技术参数和设计要求:棒料输送布料装置(方案8)功能描述如下图所示棒料输送线。
料斗中分别装有直径35mm长度150mm勺钢料和铜料。
在输送线上按照下图所示的规律布置棒料。
原动机转速为1430rpm,每分钟布置棒料40,75,90块,分3档可以调节。
W ■ II II II ■ ■ II II m團2心二、机械系统工艺动作分析由设计要求可知,该棒料输送线布料装置需要由三个部分共同构成,各执行构件为传送带轮、钢料料槽擒纵鼓轮1和铜料料斗擒纵鼓轮2,这三个构件的运动图3棒料输送线布料装置运动循环图传动带轮做间歇转动,停止时间约为进给时间的3倍,料槽擒纵鼓轮做持续转动,通过控制擒纵鼓轮的开口位置控制棒料按照需要的规律落料。
哈工大机械原理课件
I
5
IV
2
II
4
V
1
III
3
移 动 副
V
1
IV
2
螺 旋 副
V
1
2、根据组成运动副的两个运动副元素的接触情况分类 运动副元素以点或线接触的运动副称为高副 。
球面高副
柱面高副
运动副元素以面接触的运动副称为低副 。
球面低副
移动副
转动副
3、根据组成运动副的两个构件的相对运动形式分类
空间运动副
球销副
螺旋副
只是为了表明机构的运动状态或各构件的 相互关系,也可以不按比例来绘制运动简图, 通常把这样的简图称为机构示意图。
常用机构构件、运动副代表符号
绘制机构运动简图的步骤
1. 在绘制机构运动简图时,首先确定机构的原动件 和执行件,两者之间为传动部份,由此确定出组成机 构的所有构件,然后确定构件间运动副的类型。 2. 为将机构运动简图表示清楚,恰当地选择投影面。一 般选择与多数构件的运动平面相平行的面为投影面,必要 时也可以就机械的不同部分选择两个或两个以上的投影面 ,然后展开到同一平面上。总之,绘制机构运动简图要以 正确、简单、清晰为原则。 3. 选择适当的比例尺,根据机构的运动尺寸定出各运动 副之间的相对位置,然后用规定的符号画出各类运动副,并 将同一构件上的运动副符号用简单线条连接起来,这样便可 绘制出机构的运动简图。
30米/分
500
二、创新
◆自然科学领域的最高成就是发现
◆应用技术领域的最高成就是发明
发明:
◆基础理论知识
◆应用技术知识 ◆实践经验
◆强烈的创新意识 ◆勤奋的工作
两用折叠椅
外环
双曲面滚柱加载器
哈工大机械原理课程设计
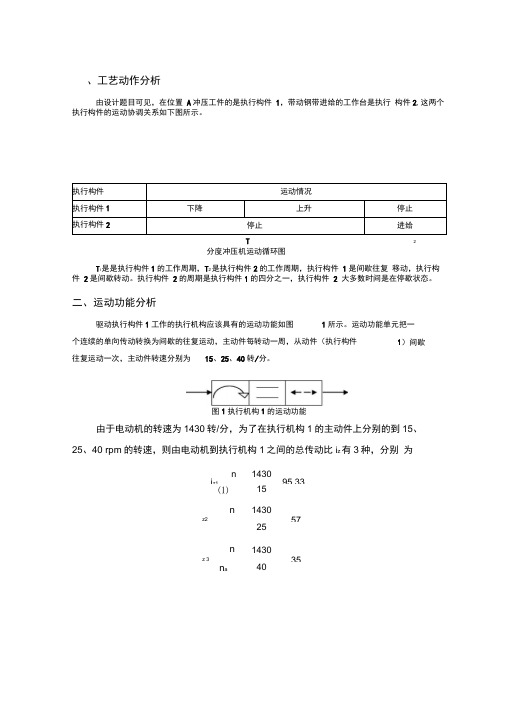
、工艺动作分析由设计题目可见,在位置 A 冲压工件的是执行构件 1,带动钢带进给的工作台是执行 构件2,这两个执行构件的运动协调关系如下图所示。
分度冲压机运动循环图T i 是是执行构件1的工作周期,T 2是执行构件2的工作周期,执行构件 1是间歇往复 移动,执行构件 2是间歇转动。
执行构件 2的周期是执行构件1的四分之一,执行构件 2 大多数时间是在停歇状态。
二、运动功能分析驱动执行构件1工作的执行机构应该具有的运动功能如图1所示。
运动功能单元把一个连续的单向传动转换为间歇的往复运动,主动件每转动一周,从动件(执行构件 往复运动一次,主动件转速分别为15、25、40转/分。
图1执行机构1的运动功能由于电动机的转速为1430转/分,为了在执行机构1的主动件上分别的到15、 25、40 rpm 的转速,则由电动机到执行机构1之间的总传动比i z 有3种,分别 为n1430i z195.33⑴15n1430z257.25n1430z 335.n a40执行构件 运动情况执行构件1 下降上升停止 执行构件2停止进给T21)间歇总传动比由定传动比i c 和变传动比i v 两部分构成,即:i z1 i c i v1 i z2 i c i v2I z3 i c i v33种总传动比中I zi 最大,I z3最小。
由于定传动比I c 是常数,因此,3种变传动比 中I vi 最大,心最小。
采用滑移齿轮变速,其最大传动比最好不大于 4,设定传动 比 I v1=4o图2有级变速运动功能单元为了保证系统过载时不至于损坏,在电动机和传动系统之间加一个过载保护 环节。
过载保护运动功能单元可采用带传动实现, 这样,该运动功能单元不仅具 有过载保护功能还具有减速功能,如图 3所示。
图3过载保护运动功能单元整个传动系统仅靠过载保护运动功能单元不能实现其全部定传动比,因此, 在传动系统中还要另加减速运动功能单元,其减速比为定传动比:I cI zI I v 1 95. 33 4 23. 8325Iv 2Iv 3I v 1I z 1 I c I z 2I c I z 3 I c于是,传动系统的有级变速功能单元如图 I95. 33 20 57. 2 23. 8325 35. 75 23. 83252所示。
哈工大机械原理课件

第4章DC-DC变换器的交流模型4.1 简介4.1 简介4.1 简介4.1 简介4.1 简介若且是在该点上发生的扰动:是一个平衡工作点小信号等效4.1 简介静态工作点线性化实际的非线性工作特性D=0.5Buck-Boost 控制-输出特性型:Buck-Boost交流等效电路模型4.2 基本的交流建模方法4.2 基本的交流建模方法4.2 基本的交流建模方法(终值)=(初始值)+(增长时长)×(平均斜率)(终值)=(初始值)+(增长时长)×(平均斜率)4.2 基本的交流建模方法电流波形:4.2 基本的交流建模方法4.2 基本的交流建模方法4.2 基本的交流建模方法4.2 基本的交流建模方法4.2 基本的交流建模方法4.2 基本的交流建模方法4.2 基本的交流建模方法4.2 基本的交流建模方法数,因此该式实际是4.2 基本的交流建模方法4.2 基本的交流建模方法4.2 基本的交流建模方法4.2 基本的交流建模方法4.2 基本的交流建模方法4.2 基本的交流建模方法4.2 基本的交流建模方法4.2 基本的交流建模方法4.2 基本的交流建模方法4.3 反激变换器的小信号建模4.3 反激变换器的小信号建模4.3 反激变换器的小信号建模4.3 反激变换器的小信号建模4.3 反激变换器的小信号建模由电感电压、电流波形:4.3 反激变换器的小信号建模由电容电流、电压波形:4.3 反激变换器的小信号建模4.3 反激变换器的小信号建模4.3 反激变换器的小信号建模dI直流项一阶交流分量(线性分量)二阶交流分量(非线性分量)4.3 反激变换器的小信号建模4.3 反激变换器的小信号建模4.3 反激变换器的小信号建模4.3 反激变换器的小信号建模同样,当满足小信号扰动时,二阶分量远小于一阶分量,于是有:上式为线性化后的输入端口电流线性化方程。
4.3 反激变换器的小信号建模4.3 反激变换器的小信号建模4.3 反激变换器的小信号建模4.3 反激变换器的小信号建模4.3 反激变换器的小信号建模4.4 状态空间平均法4.4 状态空间平均法。
优质课件精选哈工大第八版理论力学课件

4 直线平移和曲线平移
44
45
平移的其他例子
46
பைடு நூலகம்
46
观察平行四连杆机构中土黄色杆的运动
47
图示铅直平面内的平行四连杆机构。曲柄O1A以匀角速 度 2 rad/s 绕 O1轴转动
O1A=O2B =r=20cm , AB=O1O2=40cm AC=CB
12
13
14
第二篇 运动学
一 什么是运动学 1 是研究物体运动的几何性质的科学 2 运动的几何性质 运动方程、轨迹、速度和
加速度
二 意义 1 动力学的基础 2 后继课程 (机械原理)的基础
15
第二篇运动学
三 如何学习?
1 不考虑致动的原因
2 点 刚体(系统) 必须有一个以上的自由度
3 有关概念 1) 参考体 由于物体运动的描述是相对的。将观察者所在的物体称 为参考体
2)参考坐标系 固结于参考体上的坐标系称为参考坐标系----
基础内容: 第五章 第六章 可以无限制扩大
重点内容: 第七章 第八章
16
第五章 点的运动
17
§ 5-1 矢量法
矢量法应用于什么场合? 一 运动方程
r r(t)
轨迹就是矢径端点的曲线
M
r r’
O
18
§ 5-1 矢量法
二 速度
M
v
A r(t)
成反比。
i12
1 2
z2 z1
相互啮合的两齿轮的角速度之比及角加速度之比与它
们的齿数成反比。
62
§6–4 轮系的传动比(自学)
2 带轮传动
i12
1 2
哈工大机械原理课件

contents
目录
• 绪论 • 机构的结构分析 • 平面连杆机构 • 凸轮机构 • 齿轮机构 • 轮系 • 机械的平衡与调速
01
绪论
机械原理的研究对象
01 研究各种机械系统的运动规律和力的传递 关系。
02
研究各种机械系统中的机构、机器和机器 装置的设计、分析和综合方法。
03
常用的从动件运动规律有等速 运动规律、等加速等减速运动 规律、余弦加速度运动规律和 正弦加速度运动规律等。这些 运动规律各有特点,适用于不 同的工作场合和需求。
在设计从动件的运动规律时, 应考虑机构的传动性能、从动 件的受力情况、机构的动态响 应等因素,以确保机构在工作 过程中具有良好的稳定性和可 靠性。
平面机构的自由度计算
自由度是描述机构运动灵活性的参数,计算自由度可以判断机构是否具有确定的 运动状态。
平面机构的自由度计算公式为:F=3n-(2PL+Ph),其中n为活动构件数,PL为低 副数,Ph为高副数。
03
平面连杆机构
平面连杆机构的特点和基本类型
01
02
03
总结词
了解平面连杆机构的特点 和基本类型是掌握其工作 原理和应用的基础。
节气门调速
通过调节节气门的开度来控制进入发动机的空气 量,从而改变发动机的转速和功率。
离合器调速
通过控制离合器的接合与分离,实现发动机与传 动系统的结合与脱开,达到调速的目的。
变速器调速
通过改变变速器的传动比来改变输出轴的转速和 功率,实现调速。
机械的效率与节能
提高机械效率
通过优化设计、改善制造 工艺和加强维护保养,提 高机械系统的效率,减少 能量损失。
02
哈工大机械原理课设.
H a r b i n I n s t i t u t e o f T e c h n o l o g y机械原理课程设计课程名称:机械原理课程设计设计题目:棒料输送线布料装置(方案1)院系:机电工程学院班级:姓名:机电雷锋学号:电话:指导教师:设计时间:2014.6.23~ 2014.6.28©哈尔滨工业大学目录一、题目要求 (3)二、机械系统运动功能图 (3)三、机械系统运动功能分析 (3)四、系统运动方案拟定 (6)五、机械系统运动尺寸 (9)六、机械系统运动简图 (15)七、机械系统实际运动循环图 (16)棒料输送线布料装置(方案1)一、题目要求棒料输送布料装置(方案1)功能描述如下图所示棒料输送线。
料斗中分别装有直径35mm,长度150mm的钢料和铜料。
在输送线上按照下图所示的规律布置棒料。
原动机转速为1430r/min,每分钟布置棒料50,80,110块,分3档可以调节。
二、机械系统运动功能图经分析可知,钢料和铜料分两个步骤放置,首先钢料放置,铜料不动,之后钢料和铜料同时放置即可满足如图所示棒料布置规律。
所以可以有如下运动功能图。
三、机械系统运动功能分析布料装置由一台原动机驱动,有三个执行构件(钢料控制开关,铜料控制开关,工作台)协调工作。
布料装置的运动传递路径如图所示主传动链分析:如题所述,布料装置需要每分钟布料50,80,110块,而原动机转速为1430r/min,这就需要在运动当中添加减速装置和换挡装置。
(1)原动机运动功能题中所给电动机的转速为n=1430r/min,因此棒料输送线布料装置原动机的运动功能单元表达符号如图所示。
n=1430r/min(2)过载保护功能原动机与传动部分之间需要一个过载保护单元,以便在过载时保护机床免受破坏。
多数情况下,这一过载保护功能单元同时还具有减速功能(i>1),因此,其符号表达如图所示。
i c=4(3)主传动链减速运动功能每分钟布置棒料50,80,110块,需要执行构件转速分别为50r/min,80r/min,110r/min。
机械原理西北工业大学第七版CH07——机械原理课件资料文档

积分得
Jedω/dt=Me
ω=ω0+αt
φ=φ0+ω0t+αt2/2
15
机械运动方程式的求解(4/5)
2.等效转动惯量是常数,等效力矩是速度的函数
(1)机械系统实例及其运动方程式 如用电动机驱动的搅拌机系统,则 Je=常数, Me(ω)=Med(ω) -Mer(ω),其运动方程式为
Me(ω)= Jedω /dt
第七章 机械的运转及其速度 波动的调节
§7-1 概述 §7-2 机械的运动方程式 §7-3 机械运动方程式的求解 §7-4 稳定运转状态下机械的周期性速度
波动及其调节 §7-5 机械的非周期性速度波动及其调节
返1 回
§7-1 概 述
1.本章研究的内容及目的 (1)研究在外力作用下机械真实运动规律的求解
机械速度波动的调节就是要设法减小机械的运转速度不均匀 系数δ,使其不超过许用值, 即
δ ≤[δ ]
机械的周期性波动调节的方法就是在机械中安装飞轮——具 有很大转动惯量的回转构件。
(2)飞轮调速的基本原理
飞轮调速是利用它的储能作用,在机械系统出现盈功时,吸 收储存多余的能量,而在出现亏功时释放其能量,以弥补能量的 不足,从而使机械的角速度变化幅度得以缓减,即达到调节作用。
2.机械运转的三个阶段
(1)起始阶段 机械的角速度ω由零渐增至ωm,其功能关系为
Wd=Wc+E
3
(2)稳定运转阶段
• 周期变速稳定运转
ωm=常数,而ω 作周期性变化;
在一个运动循环的周期内,Wd=Wc。 • 等速稳定运转
ω=ωm=常数, Wd≡Wc 。
(3)停车阶段
ω由ωm渐减为零;E=-Wc 。
20
机械的周期性速度波动及其调节(4/6)
哈工大机械原理大作业凸轮07

H a r b i n I n s t i t u t e o f T e c h n o l o g y机械原理大作业二课程名称:机械原理设计题目:凸轮设计院系:机电学院班级:分析者:学号:指导教师:陈明、丁刚设计时间:2013.07.03哈尔滨工业大学设计说明书一.设计题目如图所示直动从动件盘形凸轮机构,其原始参数见表2-1。
从表2-1中选择一组凸轮机构的原始参数,据此设计该凸轮机构。
序号升程(mm)升程运动角( )升程运动规律升程许用压力角( )回程运动角( )回程运动规律回程许用压力角( )远休止角( )近休止角( )7 70 90 正弦加速度30 80 正弦加速度70 95 95二、推杆升程、回程运动方程及位移、速度、加速度线图2.1凸轮运动分析设凸轮的角速度为ω=1rad/s(1)推程 (正弦加速度运动)00090φ≤≤;090︒Φ=0012sin()2s h φπφπ⎡⎤=-⎢⎥ΦΦ⎣⎦0021cos()h v ωπφ⎡⎤=-⎢⎥ΦΦ⎣⎦220022sin()h a πωπφ=ΦΦ远休止运动规律 远休止运动角90185φ︒︒≤≤s h = 0v = 0a =回程运动规律(3-4-5多项式运动)回程运动角 00185255φ≤≤;'0080Φ=()345110T -15T 6T s h ⎡⎤=-+⎣⎦()22'30-T 1-2T T h v ω=+Φ ()22'260T 1-3T 2T h a ω=-+Φ 式中: ()00-T S φΦ+Φ=Φ近休止运动规律 近休止运动角265360φ︒︒≤≤s h = 0v =0a =2.2求位移、速度、加速度线图MATLAB 源程序clear clc %题设条件 c=pi/180;f01=90*c; fs1=95*c; f02=80*c; fs2=95*c; h=70; w1=1; %推杆位置f=linspace(0,2*pi,200); for n=1:length(f)if f(n)>=0 && f(n)<=f01s(n)=h*[f(n)/f 01-0.5/pi*sin(2*pi*f(n)/f 01)];v(n)=h/(f 01*c)*[1-cos(2*pi*f(n)/f 01)]; a(n)=2*pi*h/(f 01^2*c^2)*sin(2*pi*f(n)/f 01);elseif f(n)>f01 && f(n)<=f01+fs1 s(n)=h; v(n)=0; a(n)=0;elseif f(n)>f01+fs1 && f(n)<=f01+fs1+f02 T2=(f(n)-(f01+fs1))/f02;s(n)=h*(1-(10*T2^3-15*T2^4+6*T2^5)); v(n)=-30*h*w1/f02*(T2^2-2*T2^3+T2^4); a(n)=-60*h*w1^2/f02^2*(T2-3*T2^2+2*T2^3); elseif f(n)>f01+fs1+f02 && f(n)<=f01+fs1+f02+fs2 s(n)=0;v(n)=0;a(n)=0;endEnd%位置方程figure(1);plot(f,s);grid on;title('推杆位移'); %速度方程figure(2);plot(f,v);grid on;title('推杆速度'); %加速度方程figure(3);plot(f,a);grid on;title('推杆加速度');2.3位移、速度、加速度线图三. 凸轮机构的dss d ϕ-线图,确定基圆半径和偏心距3.1理论分析机构压力角α应按下式计算:1200tan ds eOP e d s s s sϕα--==++以d s /d φ为横坐标,以s (φ)为纵坐标,可作出d s /d φ-s (φ)曲线如图4-16所示,再作斜直线D t d t 与升程的[d s /d φ-s (φ)]曲线相切并使与纵坐标夹角为升程[α],则D t d t 线的右下方为选择凸轮轴心的许用区。
《机械原理》-第四章-哈工大精品课程[52P][1.02MB]
![《机械原理》-第四章-哈工大精品课程[52P][1.02MB]](https://img.taocdn.com/s3/m/2789ed0a0740be1e650e9a94.png)
移动凸轮
凸 轮 机 构 分 类
2、按从动件运动副 元素形状分类
3、按凸轮高副的锁 合方式分类
力锁合
形锁合
1、按两活动构件之间的相对运动特性分类
(1)平面凸轮机构
1)盘形凸轮
2)移动凸轮
υ2 OP12 ds/d ω1
F12
2
OP12 e ds/d e tan α s0 s s0 s
P12
α α
v2 v2
P12
1
式中:s0
2 r0
e
2
r0
F21 O
e
s
ω1 OP 12
ω1 OP12
压力角计算的统一表达式:
v2 ω1
OP12 e ds/d e tan α s0 s s0 s
定,凸轮机构的许用压力角 [ ] 也已经确定,如何
确定凸轮的基圆半径 最大压力角 max 小于或等于许用压力角 [ ] 。 在设计凸轮时,当从动件的运动规律 s( ) 已经确
r0 和偏距 e ,使凸轮机构的
这个表达式能否解决这样的命题?
OP12 e ds/d e tan α 2 2 s0 s r0 -e s
h
Φ0
Φs
Φ0
Φs
正弦加速度(摆线)运动规律
h
Φ0 Φs Φ0 Φs
3-4-5多项式运动规律
h
Φ0 Φs Φ0 Φs
三、从动件运动规律的选择
在选择从动件的运动规律时,除要考虑刚性冲击与柔性 冲击外,还应该考虑各种运动规律的速度幅值 vmax 、加速 度幅值 amax 及其影响加以分析和比较。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 3
cos 1 1 sin
2
1 cos M
2
1
1 sin
2
3 cos M
2
2
2 z
z
——槽轮径向槽数
k ( 2 z 2 )
k
z 2 2z
要使槽轮运动,其运动时间 t2>0 即:
0
z 2
要使槽轮有停歇,其运动时间 t2< t1, 即: 2z k 1
z 2
(k=1~3), z z 3 时 k 6 (k=1~5), 4 时 k 4
2、槽轮机构的角速度和角加速度 槽轮的转角2 和拨盘的转角1 关系为:
tan 2 AB O2B R sin 1 a R cos 1
R──圆柱销回转半径, ──中心距 R arctan l sin 1 令 l 2 1 l cos 1 a
2
) max
1 cos
主动轴角速度
3
从动轴角速度
1
1 90 或 1 270
(
3
1
) min cos
二、双万向联轴节 双万向联轴节是由左 右两单万向节组成
1
M
cos 1 1 sin
2
1 cos M
2
1
3
1 3
M
cos 3 1 sin
'
2 1 2 2 ,
2
2
2 z
z——槽轮径向槽数
k ( 2 z 2 )
k
z 2 2z
要使槽轮有停歇,其运动时 间 t2< t1,即:
1
k
2z z 2
由于当 z 3 时必然有:
1 2z z 2 2
故内槽轮机构拨盘上的圆 柱销只能有一个
1
2
d 2 dt
l ( l 1 ) sin 1
2
( 1 2 l cos 1 l )
2
2
1
2
l
R a
sin 2 sin
z
槽轮机构的运动线图
外槽轮机构
内槽轮机构
内、外槽轮机构的角速度和角加速度
2 max 1
2 max 1
外槽轮机构
l
R a sin
2
sin
z
内槽轮机构的运动参数
2 arctan(
R sin 1 a R cos 1 ) arctan(
l sin 1
1 l cos 1
)
2
d dt
2
l (cos 1 l )
1 2 l cos 1 l
2
z 5
时k
10 3
(k=1~3)。
(2)内槽轮机构 拨盘转过一周的时间为: 2
t1
1
若拨盘上有k 个圆柱销, 则拨盘每转一周, k 次拨 动槽轮。每次拨动槽轮的 运动时间为: '
t2
'
1
k 次拨动槽轮的运动时间 为: '
t2 k
1
t2 t1
k
2
'
2 2 1
31.44 5.41 2.30 1.35 0.70
2
z
3 4 5 6 8
外槽轮机构
6.46 2.41 1.43 1.00 0.62
内槽轮机构
0.46 0.41 0.37 0.33 0.28
内槽轮机构
1.73 1.00 0.73 0.58 0.41
运动平稳性差,不宜采用
内、外槽轮机构几何尺寸计算公式
名 称 圆销的回转半径 圆销半径 槽顶高 槽底高 符号 外啮合槽轮机构计算公式
R a sin
r 1 6
内啮合槽轮机构计算公式
R a sin
r 1 4
p z
p z
R r H h Rx
R
R
H a cos
p z
H a cos
p z
h = a -(R + r) 或h = a -(R + r) -(3 ~ 5)mm
tan f tan
O1
F N L sin F N fL cos
f•FN
P
FN 棘轮齿面角 大于摩擦角
O2
或者棘轮对棘爪的总反力FN的作用线在棘爪轴心O1和棘轮 轴心O2之间穿过
(2)偏心块楔紧条件
欲使楔块楔紧棘 轮,则必须有:
O 2 A sin F N O 2 A cos fF N
2
3 cos
2
M
3
主动轴
2
从动轴 主动轴 从动轴
3
cos 1 1 sin
2
1 cos M
2
1
1 sin
3 cos M
2
cos 3
1 3
cos 1 1 sin 1 cos M
2 2
1
1 sin 3 cos M 3
2 2
cos 3
t2 t1
(1)外槽轮机构 拨盘转过一周的时间为: 2 t1
1
若拨盘上有k 个圆柱销,则 拨盘每转一周, k 次拨动槽 轮。每次拨动槽轮的运动时 间为:
t2
'
2
1
1
k 次拨动槽轮的运动时间为:
t2 k
2
1
1
2
t2 t1
k
2 2
,
1
1
2
2
B2B 1
B2 D
E
B1
(2)正常啮合段
:
与渐开线齿轮啮合相同, B2为轮齿开始啮合点, B1为终止啮合点,两轮 作定传动比传动。
(3)后接触段 B 1 D :
两轮齿啮合点到达B1后并未脱离啮合,而是主动轮的轮齿沿 从动轮齿廓向其齿顶滑动,直至D点脱离接触。轮2的角速度 是逐渐降低。
2、不完全齿轮机构的齿顶干涉
Rx R r e
锁止弧半径
h = a - (R + r) 或h = a -(R + r) -(3 ~ 5)mm Rx = h-(a +r)
g =
锁止弧张角
2p
k
1
-2F 1
1
g
1 = 2 p( + - 完 全 齿 轮 机 构
一、不完全齿轮机构的工作原理 不完全齿轮机构是由普通渐开线 齿轮机构演变而成的一种间歇运 动机构 主动轮锁止弧S1与从动 轮的锁止弧S2接触
棘 轮 机 构
棘 轮 机 构
棘轮机构
三、棘轮机构设计中的主要问题
1、棘轮齿形的选择 (1)不对称梯形齿
不对称梯形齿强度 较高,已经标准化, 是最常用的一种齿 形
a
φ
m——模数, z——齿数 a=m, t=π m,b=0.75m D=mz,Df=D-2h,Φ=15゜~30゜
(2)直线型三角形齿
摆杆
以上两种调整棘轮转角的方法, 棘轮的最小转角都不小于一个齿距 角。若要使棘轮的转角小于一个齿 距角,则应采取以下方法:
(3)多爪棘轮机构角
棘爪数——n 棘轮齿距角—— 摆杆转角——1
棘轮转角——2
3
1
3
2
多爪棘轮机构
3、棘轮机构的可靠工作条件
(1)棘爪的可靠啮合条件 欲使棘爪顺利的滑入 棘轮齿根,则必须有: F R
轮齿式棘轮机构:
结构简单、易于制造、运动可靠、棘轮转角容易实现 有级调整
棘爪在齿面滑过时会引起噪声,高速时更为严重
轮齿式棘轮机构多用于低速、轻载时间歇运动的控制
摩擦式棘轮机构:
传递运动较平稳、无噪声,从动件的转角可作无级调整
易出现打滑现象,运动准确性较差,不适合用于精确传递 运动的场合
各种棘轮机构在生产实际中的应用
加瞬心线附加杆后,2 的变化情况如图中虚线所示
§7-4
从动轴 转 动 副
万向联轴节
转动副 十字头 主动轴 转 动 副
一、单万向联轴节结构与运动情况
主动轴与从动轴间 的瞬时角速度比:
3 1
cos 1 sin cos 1
2 2
1 0 或 1 180
(
3 1
滚子楔紧式棘轮机构
单动式棘轮机构
外 啮 式
内 啮 式
双动式棘轮机构
双动式棘轮机构
双向式棘轮机构
双向式棘轮机构
双向式棘轮机构
偏 心 楔 块 式 棘 轮 机 构
偏心楔块式棘轮机构
滚 子 楔 紧 式 棘 轮 机 构
滚子楔紧式棘轮机构
三、棘轮机构的特点和应用
棘轮机构用于将摇杆的周期性摆动转换为棘轮的单 向间歇转动,也常作为防逆转装置
1 2 t2 1 t1 2
'
t2
1 2
t1
当z1>1时 从动轮运动时间:
1 2 z1 1 t1 t2 ' 2 z1
从动轮停歇时间:
t 2 1
'
1 2 z1 1 t1 ' 2 z1
主动拨盘