红外接收解码
红外遥控解码实验报告(3篇)

第1篇一、实验目的本次实验旨在通过搭建红外遥控系统,了解红外遥控的基本原理,掌握红外遥控信号的编码和解码方法,并利用单片机实现对红外遥控信号的解码,实现对红外遥控器的控制。
二、实验原理红外遥控技术是一种无线通信技术,通过发射端发送特定编码的红外信号,接收端接收该信号并进行解码,从而实现对电器的控制。
红外遥控系统主要由发射端和接收端两部分组成。
1. 发射端:由按键矩阵、编码调制电路和红外发射器组成。
按键矩阵根据按键的不同产生不同的编码信号,编码调制电路将这些信号调制在38kHz的载波上,红外发射器将调制后的信号发射出去。
2. 接收端:由红外接收器、前置放大电路、解调电路和指令信号检出电路组成。
红外接收器接收发射端发射的红外信号,前置放大电路对信号进行放大,解调电路将38kHz的载波信号去除,指令信号检出电路从解调后的信号中提取出指令信号。
三、实验设备1. 红外遥控发射器2. 红外接收模块3. 单片机开发板4. 连接线5. 电源6. 红外遥控解码程序四、实验步骤1. 搭建红外遥控系统:将红外接收模块连接到单片机开发板的相应引脚上,确保连接正确无误。
2. 编写红外遥控解码程序:根据红外遥控协议,编写解码程序,实现对红外信号的解码。
3. 程序烧录与调试:将解码程序烧录到单片机中,连接电源,进行程序调试。
4. 测试与验证:使用红外遥控器对单片机进行控制,观察单片机是否能够正确解码红外信号,并实现相应的控制功能。
五、实验结果与分析1. 红外遥控系统搭建成功:通过连接红外接收模块和单片机开发板,成功搭建了红外遥控系统。
2. 解码程序编写与调试:根据红外遥控协议,编写解码程序,实现对红外信号的解码。
在调试过程中,通过观察单片机的输出,验证了程序的正确性。
3. 测试与验证:使用红外遥控器对单片机进行控制,观察单片机是否能够正确解码红外信号,并实现相应的控制功能。
实验结果表明,单片机能够成功解码红外信号,并实现红外遥控器的控制功能。
红外解码方法简述

红外解码方法简述1 引言低速的红外无线传输是一种廉价的无线通讯/控制方案,在家电领域已经广泛使用。
在嵌入式领域,只要工作环境比较优良,数据量小,传输距离较近(5米以内),同样可以采用红外无线传输。
本站的A Tmega16学习板上设计了红外发射管与接收管,配合站长家中闲置的“HITACHI VM101”型电视遥控器,详细分析一下此遥控器的红外编解码原理与单片机解码方法。
2 红外数据序列采集“HITACHI VM101”型电视遥控器结构非常简单,主芯片是M50560-123FP ,外围配有455kHZ 晶体做为主时钟源,一个红外发射管,一个发射管的驱动三极管以及若干阻容器件。
考虑到此芯片为专用芯片,就算找到芯片资料去啃E 文也对以后没有多大帮助,所以站长采用了最直接的方法——软件采集输出电平变化时间间隔。
按照学习板的红外接收管连接方法,当接收到红外数据时,在A Tmega16的INT0脚上电平为高,电平的上升沿变化可以做为数据接收的开始。
普通使用的红外管载波频率为38kHz-40kHz 之间,这样可以先设计一个n 倍于载波频率的定时器计时,在中断触发以后对INT0脚上的高低电平计时,就可以得到一个完整的红外数据序列。
站长首先采用了110kHz 的定时器来采集数据,计时用了一个16位的变量,得到的一个数据序列如下:922 1384 1440 1498 1555 1613 1669 1727 1784 1842 1899 2072 2129 2187 2243 2416 2473 2531 2588 2761 2818 2991 3047 3221 3277 3451 3507 3565 3622 3795 3852 3910 3966 4140 4196 4369 4426 4484 4541 4714 4771 4944 5000 5058 5115 5173 5230 5288 5344 5402 5459 5517 5573 5747 5803 5861 5918 5976 6033 6206 6262 6436 6492 6666 6722 6895 6952 序列一 110kHz 定时采集序列其中相邻两个数的差值即为电平维持时间。
红外遥控器软件解码及其应用

红外遥控器软件解码及其应用随着现代科技的不断发展,红外遥控器已经成为人们日常生活中的必备工具之一。
不过,很多人并不了解红外遥控器的工作原理以及它是如何通过软件解码来实现遥控效果的。
本文将详细介绍红外遥控器软件解码的相关知识,以及其在实际应用中的作用。
一、红外遥控器的工作原理首先,我们需要了解红外遥控器的工作原理。
简单来说,红外遥控器是一种利用红外线光谱来传输指令的设备,通过在发射端发送编码的红外信号,再在接收端解码后执行相应的指令。
通常,红外遥控器由发射部分与接收部分两个部分组成。
发射部分由红外LED发射器构成,它会通过红外发射现象来发送编码的红外信号。
在接收端,红外接收器则会接收到这些信号,并将其转换成电信号进行解码。
之后,解码器会解析出信号的编码含义,然后执行相应的指令。
这就是红外遥控器的基本工作原理。
二、红外遥控器软件解码的实现在红外遥控器的工作中,软件解码起到了重要的作用。
所谓软件解码,就是在终端设备中运行的一种程序,能够将遥控器发射的红外编码转换成可读的指令。
而这些指令就可以用于控制各种家电、设备等。
软件解码的实现主要有两种方式。
第一种是使用硬件解码器,这需要在终端设备上安装一个专门的硬件解码器,用于解析红外信号,并输出相应的指令。
第二种方法则是使用软件解码器,这需要在终端设备上安装一个软件程序,用于解析红外信号并输出指令。
在软件解码的实现中,最常见的是使用赛贝尔红外编解码库。
这个库已经成为了广泛使用的一种红外编解码方案。
它可以用于各种嵌入式设备、物联网设备、手机、电视机顶盒等多种应用场景中。
三、红外遥控器软件解码的应用目前,红外遥控器软件解码已广泛应用于各种智能家居、物联网设备、工控设备等领域。
下面列举一些具体的应用案例:1、智能家居:通过使用红外遥控器软件解码,可以实现对家中的各种电器、设备的遥控控制。
如电视、空调、照明设备等。
2、物联网设备:红外遥控器软件解码还可以用于物联网设备中,如智能家居中的智能门锁、智能家电等。
红外遥控解码程序

红外遥控解码程序红外接收头的型号有很多HS0038 VS838等功能⼤致相同,只是引脚封装不同。
红外接收有⼏种统⼀的编码⽅式,采样哪种编码⽅式取决于遥控器使⽤的芯⽚,接收头收到的都是⼀样的。
电视遥控器使⽤的是专⽤集成发射芯⽚来实现遥控码的发射,如东芝TC9012,飞利浦AA3010T等,通常彩电遥控信号的发射,就是将某个按键所对应的控制指令和系统码(由0和1组成的序列),调制在38KHz的载波上,然后经放⼤、驱动红外发射管将信号发射出去。
不同公司的遥控芯⽚,采样的遥控码格式也不⼀样,较普遍的有两种,⼀种NEC标准,⼀种是PHILIPS标准。
NEC标准:遥控载波的频率为38KHz(占空⽐1:3)当某个键按下时,系统⾸先发射⼀个完整的全码,如果按键超过108ms仍未松开,接下来发射的代码(连发代码)将由起始码(9ms)和结束码(2.5ms)组成。
⼀个完整的全码 = 引导码 +⽤户码 +⽤户码 + 数据码 + 数据码 + 数据反码。
其中,引导码⾼电平9ms,低电平4.5ms;系统码8位,数据码8位,共32位;其中前16位为⽤户识别码,能区别不同的红外遥控设备,以防⽌不同的机种遥控码互相⼲扰。
后16位为8位的操作码和8位的操作反码,⽤于核对数据是否接收准确。
收端根据数据码做出应该执⾏上⾯动作的判断。
连发代码是在持续按键时发送的码。
它告知接收端。
某键是在被连续的按着。
NEC标准下的发射码表⽰发射数据0时⽤”0.56ms⾼电平 + 0.565ms低电平 = 1.125ms”表⽰;数据1⽤”⾼电平0.56ms + 1.69ms = 2.25ms”表⽰。
遥控器发射信号:需要注意的是:当⼀体化接收头收到38kHz红外信号时,输出端输出低电平,否则为⾼电平。
所以⼀体化接收头输出的波形和发射波形是反向的PHILIPS标准:载波频率38KHz:没有筒,点按键时,控制码1和0之间切换,若持续按键,则控制码不变。
⼀个全码 = 起始码’11’ +控制码 + ⽤户码 + ⽤户码数据0⽤“低电平1.778ms + ⾼电平1.778ms”表⽰;数据1⽤“⾼电平1.778ms + 低电平1.778ms”表⽰。
红外解码说明文档
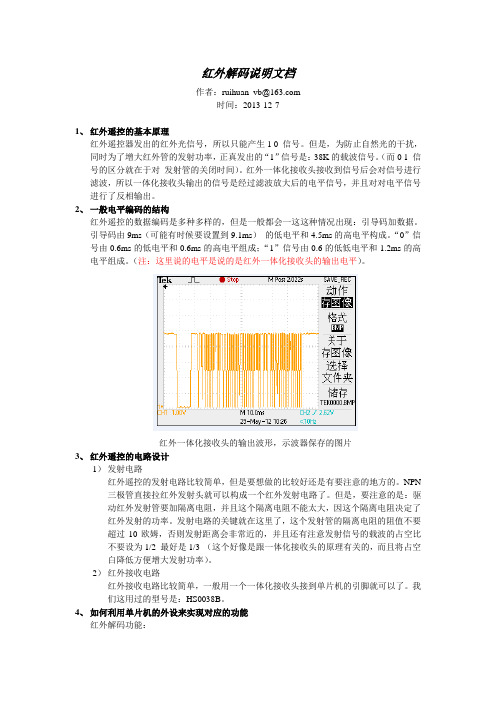
红外解码说明文档作者:ruihuan_vb@时间:2013-12-71、红外遥控的基本原理红外遥控器发出的红外光信号,所以只能产生1 0 信号。
但是,为防止自然光的干扰,同时为了增大红外管的发射功率,正真发出的“1”信号是:38K的载波信号。
(而0 1 信号的区分就在于对发射管的关闭时间)。
红外一体化接收头接收到信号后会对信号进行滤波,所以一体化接收头输出的信号是经过滤波放大后的电平信号,并且对对电平信号进行了反相输出。
2、一般电平编码的结构红外遥控的数据编码是多种多样的,但是一般都会一这这种情况出现:引导码加数据。
引导码由9ms(可能有时候要设置到9.1ms)的低电平和4.5ms的高电平构成。
“0”信号由0.6ms的低电平和0.6ms的高电平组成;“1”信号由0.6的低低电平和1.2ms的高电平组成。
(注:这里说的电平是说的是红外一体化接收头的输出电平)。
红外一体化接收头的输出波形,示波器保存的图片3、红外遥控的电路设计1)发射电路红外遥控的发射电路比较简单,但是要想做的比较好还是有要注意的地方的。
NPN 三极管直接拉红外发射头就可以构成一个红外发射电路了。
但是,要注意的是:驱动红外发射管要加隔离电阻,并且这个隔离电阻不能太大,因这个隔离电阻决定了红外发射的功率。
发射电路的关键就在这里了,这个发射管的隔离电阻的阻值不要超过10欧姆,否则发射距离会非常近的,并且还有注意发射信号的载波的占空比不要设为1/2 最好是1/3 (这个好像是跟一体化接收头的原理有关的,而且将占空白降低方便增大发射功率)。
2)红外接收电路红外接收电路比较简单,一般用一个一体化接收头接到单片机的引脚就可以了。
我们这用过的型号是:HS0038B。
4、如何利用单片机的外设来实现对应的功能红外解码功能:因为红外解码的第一步骤是对电平长度的检测,因而最好是利用单片机的捕获功能来检测电平的长度,然后再根据电平长度来判断其意义(建议:不要检测双边沿,最好是检测一个周期的电平,例如下降沿的时间间隔)。
红外解码芯片
红外解码芯片红外解码芯片是一种能够接收和解码红外信号的集成电路,常用于红外遥控器和红外通信领域。
它可以将接收到的红外信号转化为数字信号,以便被其他电子设备识别和处理。
红外解码芯片的主要功能是将接收到的红外信号解码为二进制数据,然后再进行相应的处理。
它通常由红外接收器、解码模块和输出接口组成。
红外接收器负责接收红外信号,并将其转化为电信号;解码模块对接收到的电信号进行分析和解码,将其转化为二进制数据;输出接口将解码后的数据输出给其他电子设备。
红外解码芯片的工作原理是基于红外线的物理特性。
当红外遥控器发送信号时,它会产生红外光脉冲,其中包含有关按键的信息。
红外接收器接收到这些红外光脉冲后,将其转化为对应的电信号。
解码模块根据一定的解码算法,将电信号解码为二进制数据。
然后,这些数据可以被其他电子设备识别和处理。
红外解码芯片具有高速解码、高精度解码和抗干扰能力强等优点。
它可以快速地解码红外信号,并输出准确的二进制数据。
同时,它也具有抵抗电磁干扰和抵抗温度变化的能力,能够在各种环境下稳定地工作。
红外解码芯片在遥控器领域有广泛的应用。
它可以接收和解码各种类型的红外信号,包括多种红外遥控器协议。
它可以用于控制电视、空调、音响、摄像机等各种电子设备。
通过红外解码芯片,遥控器可以将按键操作转化为红外信号,从而实现对电子设备的控制。
此外,红外解码芯片还可以用于红外通信领域。
它可以接收和解码来自其他红外设备的信号,并将其转化为二进制数据。
通过红外通信,可以实现无线数据传输和远程控制等功能。
总之,红外解码芯片是一种重要的集成电路,它能够将接收到的红外信号解码为二进制数据,并输出给其他电子设备。
它在红外遥控和红外通信领域有着广泛的应用前景。
随着科技的不断发展,红外解码芯片将会更加高效、精确和智能化,为人们的生活带来更多便利。
红外遥控解码原理

第五讲红外遥控一、红外接收头外形及与单片机连接电路(a) (b)图1图1(a)为红外接收头HX1838的外形图,它有三个引脚,其中1为接收端2为地端3为电源端。
其与单片机连接电路图见(b)所示,红外接收头的接收引脚与单片机的P3.2相连。
二、红外遥控简介红外遥控是一种比较廉价的近距离遥控方式。
它由发射模块和接收模块两部分组成,编码格式有脉冲宽度调制和脉冲相位调制两大类。
本节我们不考虑发射模块而只研究接收端的解码。
本例我们以比较容易的脉冲宽度调制来介绍解码原理。
三、发射端数据的编码当我们按下遥控器后,遥控器发出一帧数据。
这一帧数据由前导码、用户码高8位、用户码低8位、数据码、数据反码组成。
其中前导码为9ms高电平接着4.5ms低电平,标志数据帧的开始;用户码(共16位)为红外接收器识别遥控器的身份的标志,不同的遥控器一般用户码不同,以防止不同电器设备之间遥控码的干扰;数据码为红外接收器识别遥控器上不同的按键的标志,对同一遥控器来说,按不同的键所发出的二进制编码具有相同的用户码,不同的数据码,如图1所示.数据反码用于信息正确接收校验。
图1红外遥控解码精简设计。
孙卫锋,,郑秀娥。
山东理工大学学报(自然科学版) 第20卷第6期2006年26~291、16位用户码,8位数据码和8位数据反码中的数据位定义以脉宽0.56ms间隔0.565ms周期1.125ms表示二进制“0”,以脉宽0.56ms间隔1.69ms 周期2.25ms表示二进制“1”,其波形分别如图2(a)和(b)所示。
(a) (b)图22、重复码以9ms高电平,2.25ms低电平,再0.56ms高电平定义为重复码,持续按键时,该键编码连续发送,首帧为数据帧,其后为重复码,周期为108us,如图3所示。
图3四、接收端的解码原理解码就是将HX1838输出的脉冲还原为二进制的“0”和“1”,得到二进制“0”,“1”序列,进而分析所含的用户码和数据码。
当HX1838在遥控有效距离内,接收到红外遥控脉冲信号后,由内部转换成电压信号并经放大、长时控制、干扰抑制、带通滤波并整形后输出遥控代码脉冲.脉冲的形式为遥控器发射脉冲的倒像.图4表明了遥控发射码与HX1838解码输出码之间的波形关系.一定要注意,单片机接收端与发射端的信号是倒像关系,发射端引导码是9ms高电平,2.25ms低电平,在单片机接收端就变成了9ms低电平和2.25ms高电平,发射端发射位0,则单片机接收端为高电平。
红外解码教程

return TH1*256+TL1;
}
//=============================================================
unsigned int Ir_Get_High()
{
TL1=0;
TH1=0;
Led_Buf[2]=0;
Led_Buf[3]=0; //显示区设成0
do
{
restart:
while(Ir_Pin);
temp=Ir_Get_Low();
if(temp<c(8500) || temp>c(9500)) continue;//引导脉冲低电平9000
unsigned char Ir_Buf[4]; //用于保存解码结果
//==============================================================
timer0() interrupt 1 using 1 //数码管扫描
{
TL0=65536-1000;
char i,j;
Led_Index=1;
TMOD=0x11;
TL0=65536-1000;
TH0=(65536-1000)/256; //定时器0设定约1000us中断一次,用于数码管扫描
EA=1;
ET0=1;
TR0=1;
Led_Buf[0]=0;
Led_Buf[1]=0;
0xf8,0; //共阳极数码显示码0-F.
unsigned char code Led_Sel[]={0xe,0xd,0xb,0x7};
红外线遥控解码原理

红外线遥控解码原理一、引言红外线遥控解码是一种常见的电子技术应用,广泛用于电视、空调、音响等家电产品中。
通过红外线遥控解码技术,可以实现遥控器与设备之间的无线通信,方便人们对设备进行远程操控。
本文将介绍红外线遥控解码的原理和实现方式。
二、红外线遥控解码原理红外线遥控解码的原理是利用红外线信号的特点进行解码。
遥控器通过按键操作产生一系列的红外信号,这些信号被红外发射器发射出去,然后被接收器接收并解码。
下面将详细介绍红外线遥控解码的原理。
1. 红外线信号的特点红外线是一种电磁波,波长在0.75微米到1000微米之间。
在这个波长范围内,红外线具有较好的穿透性,能够穿透一些物体,比如空气、玻璃等。
同时,红外线的波长也决定了它能够被人眼所感知。
2. 红外线遥控信号的编码方式红外线遥控信号一般采用脉冲宽度编码(Pulse Width Encoding)的方式进行编码。
即通过调节红外线信号的脉冲宽度来表示不同的信息。
通常会将一个编码周期分为若干个时间单位,每个时间单位内的脉冲宽度决定了信号的状态,比如高电平表示1,低电平表示0。
3. 红外线遥控信号的解码方式红外线遥控信号的解码一般分为两个步骤:解调和解码。
解调是指将接收到的红外线信号转换为电信号,解码是指将解调后的电信号转换为对应的按键信息。
解调通常采用红外线接收头来完成,红外线接收头是一种能够感知红外线信号并将其转换为电信号的传感器。
红外线接收头内部含有一个光电二极管,当红外线信号照射到光电二极管上时,会产生一个电压信号。
通过对这个电压信号进行放大和滤波处理,可以得到解调后的电信号。
解码是将解调后的电信号转换为对应的按键信息。
解码一般采用红外线遥控解码芯片来完成,这些芯片内部包含了一系列的逻辑电路和存储器,能够根据输入的电信号解码出对应的按键信息。
不同的遥控器厂商和设备类型会使用不同的解码协议,因此解码芯片需要根据具体的解码协议来进行解码。
三、红外线遥控解码的实现方式红外线遥控解码可以通过硬件电路和软件算法两种方式来实现。
单片机红外接受解码程序成功版

单片机红外接受解码程序成功版1、效果图2、发射码格式3、38KH载波发射(完整的发射图)4、 0 与 1的区别5、载波6、小结7、代码发射码格式38KH载波发射(完整的发射)0与1的区别载波小结1、发射端发射出来的是高电平。
但是接收到的是低电平。
(接收到的数据与发射的相反)2、我这里用的外部下降沿触发的中断3、使用12M的晶振完4、整源码下载地址:代码#include <reg51.h>sbit IR=P3^2; //红外接口标志sbit dm = P2^2; //段码sbit wm = P2^3; //位码unsigned char hc[8]; //数码管显示缓存unsigned char DM[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0 x7c,0x39,0x5e,0x79,0x71};// 显示段码值0~Funsigned char WM[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f}; //位码。
显示的位置unsigned char sj[33]; //接收脉冲时间数组char w=0; //数码管显示缓存指针(0~7)unsigned char i; //脉冲个数记录unsigned char mcsj; //脉冲时间(大于0.56ms小于1.125ms为0,大于1.125ms小于2.25ms)bit MC=0; //接收红外脉冲开始标志(0:脉冲已经结束,1:脉冲刚开始)bit JS=0; //脉冲接收结束标志位(1标志接收结束)bit JM=0; //解码完成标志位(1:解码完成)void Delay(unsigned char f);void dsq_0() interrupt 1 using 1 //定时器T0中断服务函数{mcsj++; //256}void wbzd_0() interrupt 0 //外部中断服务函数{if(MC){if(mcsj>32) //判断是不是引导码。
《红外接收解码》课件

• 总结词:稳定性好的红外接收解码器能够提高系统的可靠性和稳定性,减少维护成本和故障率。 • 详细描述:为了提高稳定性,红外接收解码器通常采用一系列技术措施,如温度补偿、电源管理、冗余设计等。这些技术措施有助于减小环境因素对接收器性能的影响,提高其可靠性
对采集到的红外信号进行滤波和放大 处理,以消除噪声和提高信号的信噪 比。
采样和量化
将连续的红外信号转换为离散的数字 信号,便于后续处理和分析。
解码
解码算法实现
根据红外编码协议,实现相应的解码算法,还原出原始的控 制指令。
输出接口设计
设计合适的输出接口,将解码后的控制指令传输到目标设备 或系统中。
04
VS
详细描述
在工业自动化生产线中,红外接收解码技 术可以用于实现设备的远程控制和监测, 提高生产线的自动化程度和生产效率,同 时降低设备故障率,保障生产安全。
06
红外接收解码技术未来展 望
技术发展趋势
更高频率
多光谱融合
随着红外探测器技术的进步,未来红 外接收解码技术将向更高频率发展, 以实现更快速的数据传输和更准确的 测温。
02
红外接收解码系统组成
红外接收器
红外接收器是系统的核心部分,负责 接收红外信号并将其转换为电信号。
光学系统负责聚焦和传输红外信号, 光电转换器件将红外光转换为电信号 ,信号处理电路则对电信号进行进一 步处理。
红外接收器通常由光学系统、光电转 换器件和信号处理电路组成。
红外接收器的性能直接影响整个系统 的性能,因此需要选择高灵敏度、低 噪声、抗干扰能力强的接收器。
红外接收解码

ቤተ መጻሕፍቲ ባይዱ
1 红外遥控系统
通用红外遥控系统由发射和接收两大部分组成,应用编/解码专用集 成电路芯片来进行控制操作,如图1所示。发射部分包括键盘矩阵、 编码调制、LED红外发送器;接收部分包括光、电转换放大器、解调、 解码电路。
遥控发射器及其编码 遥控发射器专用芯片很多,根据编码格式可以分成两大类,这里我们以运用比较广泛, 解码比较容易的一类来加以说明,现以兼容NEC的uPD6121G芯片发射码格式的芯片组 成发射电路为例说明编码原理。当发射器按键按下后,即有遥控码发出,所按的键不 同遥控编码也不同。这种遥控码具有以下特征: 采用脉宽调制的串行码,以脉宽为0.565ms、间隔0.56ms、周期为1.125ms的组合表示二 进制的“0”;以脉宽为0.565ms、间隔1.685ms、周期为2.25ms的组合表示二进制的“1”, 其波形如图2所示。
bit DeCode(void) { unsigned char i,j; unsigned char temp; //储存解码出的数据 for(i=0;i<4;i++) //连续读取4个用户码和键数据码 { for(j=0;j<8;j++) //每个码有8位数字 { temp=temp>>1; //temp中的各数据位右移一位,因为先读出的是高位数据 TH0=0; //定时器清0 TL0=0; //定时器清0 TR0=1; //开启定时器T0 while(IR==0) //如果是低电平就等待 ; //低电平计时 TR0=0; //关闭定时器T0 LowTime=TH0*256+TL0; //保存低电平宽度 TH0=0; //定时器清0 TL0=0; //定时器清0 TR0=1; //开启定时器T0 while(IR==1) //如果是高电平就等待 ; TR0=0; //关闭定时器T0 HighTime=TH0*256+TL0; //保存高电平宽度 if((LowTime<370)||(LowTime>640)) return 0; //如果低电平长度不在合理范围,则认为出错,停止解码 if((HighTime>420)&&(HighTime<620)) //如果高电平时间在560微秒左右,即计数560/1.085=516次 temp=temp&0x7f; //(520-100=420, 520+100=620),则该位是0 if((HighTime>1300)&&(HighTime<1800)) //如果高电平时间在1680微秒左右,即计数1680/1.085=1548次 temp=temp|0x80; //(1550-250=1300,1550+250=1800),则该位是1 } a[i]=temp; //将解码出的字节值储存在a[i] } if(a[2]=~a[3]) //验证键数据码和其反码是否相等,一般情况下不必验证用户码 return 1; //解码正确,返回1 }
红外遥控解码原理

感谢观看
汇报人:XX
红外遥控解码技 术能够提高智能 家居系统的稳定 性和可靠性
红外遥控解码技 术能够实现智能 家居系统的自动 化控制
红外遥控解码技 术能够提高智能 家居系统的安全 性和隐私保护
04
红外遥控解码的发展趋势
提高解码的准确性和稳定性
采用更先进的 算法和编码技 术,提高解码 的准确性和稳
定性
增加抗干扰能 力,降低外界 因素对解码的
影响
优化硬件设计, 提高接收器的 灵敏度和稳定
性
结合人工智能 技术,实现自 适应学习和优
化解码效果
实现多通道解码和多协议兼容
红外遥控解码技术不断发展,未来将实现多通道解码,提高解码效率和稳定性。 随着不同品牌和型号的红外遥控器不断涌现,多协议兼容将成为解码技术的重要发展方向。 解码芯片厂商将不断推出支持更多协议和通道的解码芯片,以满足市场需求。 未来红外遥控解码技术将更加智能化和人性化,为用户带来更加便捷的使用体验。
灯光:红外遥控解码技术也可以 用于控制灯光,如调节亮度、色 温等,实现智能照明。
在工业控制中的应用
实现远程控制:通过红外遥控解码技术, 工业控制中可以实现设备的远程启动、 停止、调节等功能,提高生产效率。
自动化监控:红外遥控解码技术可以用 于工业控制中的自动化监控,例如对温 度、湿度、压力等参数的实时监测和调 节。
无线通信:红外遥控解码技术可以实现工 业控制中的无线通信,避免了布线的繁琐 和成本,提高了系统的灵活性和可靠性。
安全性:红外遥控解码技术可以用于工 业控制中的安全保护,例如对设备的锁 定、解锁等操作,保证生产过程的安全 可控。
在智能家居系统中的应用
红外遥控解码技 术能够实现智能 家居系统的远程 控制
红外解码
一、红外遥控传输编码协议鉴于彩电、VCD、DVD音视频系统和家电音响设备所配红外遥控器的控制种类多,各遥控器之间工作时又不能互相干扰,若采用简单的编码方式,很难适应其要求,所以,家电专业生产厂家给这此遥控器制定了严格的红外线传输编码协议,市面上有几种编码协议,如NEC码、Sonyd码、RECS80码、Motorola码、Japanese码、SAMSUNG码等,这里仅对NEC编码协议为实例,先详细介绍它的编码方式,然后介绍遥控器的接收解码原理,再用51单片机把接收的解码信号按键码工作方式读取出来。
图11。
红外编码NEC协议NEC协议的编码称为NEC码,采用脉冲相位调制(PPM),红外遥控器调制波的载波频率为38kHz。
图2是NEC码的定义和编码格式:图2(a)是NEC协议的“0”、“1”码的定义,即“0”码定义为0.56ms高电平脉宽(常称为传号)和0.565ms低电平(常称为空号)组成“0”码;“1”码定义为0.56ms高电平脉宽和1.69ms低电平,组成“1”码。
由此可见NEC协议“0”、“1”码定义与我们熟悉的二进制“0”、“1”定义完全不同。
图2(b)是NEC协议传输一帧信息(或信号)码的组成,每一帧信息由引导码(9ms脉宽和4.5ms低电平)开始,后面紧跟着16位地址码(又称用户码)和16位键码(又称命令码)。
在16位地址码中,有的分为低8位地址和高8位地址;而有的高8位地址码是低8位地址码的反码。
在16位键码中,其高8位是键码,低8位是键码的反码。
地址码和命令码的发送均是低位在前,高位在后。
由上述可见,NEC协议的一帧信息占用的时间长度为67.5ms。
NEC协议规定,每按一次遥控器键,就发送如图2(b)的一帧码,但若按住遥控器不放,则每隔108ms,发一次重复码,如图2(c)所示。
重复码的特点就是在发第一帧编码之后的108ms,又发送新的引导码,引导码的组成是9ms高电平脉宽,接着是2.25ms低电平(即空号),空号之后又是0.5ms高电平脉宽,然后发送与第一帧相同的16位数据码和16位命令码。
单片机实现红外接收解码

单片机实现红外接收解码摘要:接收到红外遥控器的脉冲波形,并通过解析其波形得到红外遥控器的相应解码,实习对相应设备的控制。
本文详细接受红外遥控技术原理并如何通过C51单片机实现红外遥控。
关键字:单片机,红外遥控,解码1.引言遥控器相信大家不会陌生,日常生活中会使用到各种各样的遥控器,比如电视机、DVD 机、空调、机顶盒甚至音响、热水器等都用到遥控器,其实红外技术已经走进与人们的生活并且与人们的生活息息相关了。
红外遥控器作为设备的输入控制具有操作简便、价格便宜等诸多好处。
您可以根据您公司产品需要和遥控器提供商协商定制遥控器,包括遥控器键盘布局、每个按键的键码等。
遥控器键盘上每个按键的键码是一个小于256的一个数值,按键后通过遥控器红外管产生脉冲发送出去,红外接收器接收到脉冲后,对脉冲流进行分析,提取键码值,并按照键码值实现其遥控目的。
2.红外接收原理红外遥控信号接收:红外接收电路可以使用集成接收器,接收器包括红外接收管及信号处理IC,接收器对外只有三个引脚,一个接电源的Vcc脚、一个接地的GND脚、一个脉冲信号输出脚,当然脉冲信号输出脚直接接单片机的某个可以使用的IO脚就可以了。
3.脉冲波形分析:每次按键,红外接收器这边会收到一串脉冲宽度不等的脉冲波形流,其脉冲流由35个脉冲波形构成:前导码:第1个脉冲波形用户码1:第2到第9个脉冲波形用户码2:第10到第17个脉冲波形键码:第18到第25个脉冲波形键码反码:第26到第33个脉冲波形连续按键脉冲:第34和第35个脉冲为结束脉冲(也即连续按键脉冲),在每次按键结束后会有两个结束脉冲,如果一直按键不放的话,会一直发送连续按键脉冲,并可以认为在收到10个连续按键脉冲后是下一个按键。
注意:不同的遥控器产生的用户码值可能不一样,笔者碰到两种不同的用户码:0x00,0xFF及0x04,0x7F。
脉冲流中有四种不同的脉冲波形宽度:其中前导码脉宽为:40(4ms) < 脉冲宽度< 50(5ms)连续按键脉宽为: 21(2.1ms) < 脉冲宽度 < 25(2.5ms)bit "0" 脉宽为: 3(0.3ms) < 脉冲宽度 < 7(0.7ms)bit "1" 脉宽为: 14(1.4ms) < 脉冲宽度 < 19(1.9ms)在收到一串脉冲流后,就要对其进行分析,先要检测第一个脉冲波形是不是前导码,如果不是,则继续检测前导码,如果是则检测如下32个脉冲波形:用户码1为1字节,由8个脉冲波形组成(其中一个脉冲波形表示字节中1 bit );用户码2为1字节; 键值为1字节;键值反码为1字节,键值反码为键值取反值。
红外接收电路原理

红外接收电路原理
红外接收电路是一种用于接收和解码红外线信号的电路。
它主要由红外接收器、滤波器和解码器组成。
红外接收器是最关键的部分,它通常由一个红外光敏二极管组成。
当有红外线照射到二极管时,二极管就会产生电流。
这个电流的大小与红外线的强度成正比,所以它可以被用来检测红外线的存在。
为了减少环境中其他光源的干扰,红外接收电路还需要使用一个滤波器。
这个滤波器一般是一个窄带滤波器,它只允许特定频率的红外线通过,而屏蔽其他频率的光线。
解码器是用来解析接收到的红外信号的。
红外遥控器通常会发送一系列的红外脉冲,每个脉冲表示一个特定的命令。
解码器将接收到的脉冲转化为数字信号,并将其发送给其他电路,例如微处理器或其他逻辑电路,以执行相应的操作。
总之,红外接收电路通过红外接收器接收红外线信号,使用滤波器滤除不需要的光线,然后使用解码器将接收到的信号解析成数字信号,从而实现对红外信号的检测和解码。
红外解码原理
红外解码原理
红外解码是一种通过解析红外信号来识别和转换成可读信息的技术。
红外信号是由红外发射器产生的,可以在不可见的红外光谱范围内传输数据。
解码器是一种特殊的电子设备,它可以将收到的红外信号转换成可读的信号,例如二进制代码或其他形式的控制指令。
红外解码的原理是基于红外传输的工作原理。
在红外传输中,发送端的红外发射器会产生一个具有特定编码的红外信号,然后通过空气或其他介质传输到接收端。
接收端的红外接收器会接收到红外信号,并将其转换成电信号。
接下来,解码器会对这些电信号进行解析,以获得原始数据。
解码器的工作原理是通过识别红外信号的特征来解析数据。
红外信号通常以脉冲的形式传输,即通过发送一系列的脉冲信号来表示不同的信息。
解码器会根据脉冲信号的频率、持续时间和间隔等特征来解析数据。
这些特征被称为红外编码协议,不同的设备和厂商可能使用不同的编码协议。
一旦解码器成功解析了红外信号,并将其转换成原始数据,就可以根据需要进行进一步的处理。
例如,将数据转换成可读的文本、控制指令或其他形式的操作。
此外,解码器还可以与其他设备或系统进行通信,以实现各种功能,例如遥控器控制电视或空调等。
总的来说,红外解码是一种将红外信号转换成可读信息的过程,其原理是通过解析红外信号的特征来识别和转换数据。
它在许
多应用中起着关键的作用,例如智能家居、安防系统和无线通信等。
单片机的红外遥控器解码原理与实现

单片机的红外遥控器解码原理与实现红外遥控器是我们日常生活中常见的电子设备,它通过使用红外线信号与接收器进行通信。
而在这个过程中,单片机起到了解码的重要作用。
本文将介绍单片机解码红外遥控器的原理以及实现方法。
一、红外遥控器的工作原理红外遥控器是一种使用红外线进行通信的设备,它主要由发送器和接收器两部分组成。
发送器将指令数据转换为红外脉冲信号并发送出去,接收器通过接收红外线信号并将其转换为电信号,进而解码为可识别的指令。
而单片机则负责接收并解码红外信号,将其转化为具体的操作。
二、单片机解码红外信号的原理单片机解码红外信号主要分为两个步骤:红外信号的接收和信号的解码处理。
1. 红外信号的接收单片机通过外部的红外接收器接收红外信号。
红外接收器可以通过外部电路将接收到的红外信号转换为电压信号,然后通过单片机的IO 口输入。
2. 信号的解码处理接收到的红外信号经过IO口输入后,单片机需要对信号进行解码处理。
解码的过程涉及到红外信号的标准化和解析。
对于常见的红外遥控器协议,单片机需要能够识别其编码方式,确定其协议格式。
这些协议通常包含了引导码、地址码和指令码等信息。
在解析红外信号时,单片机首先需要识别引导码。
引导码是红外信号的起始标志,通常由高、低电平组成,表示编码的开始。
单片机通过判断引导码的时间长度来确定信号的开始。
接下来,单片机需要识别地址码和指令码。
地址码是用来区分不同的红外遥控器设备,指令码则表示具体的操作指令。
单片机通过判断地址码和指令码的高、低电平时间长度来确定具体的操作。
三、单片机解码红外信号的实现方法单片机解码红外信号有多种实现方法,以下是一种简单的实现示例。
首先,需要连接红外接收器到单片机的IO口,将接收到的信号输入到单片机。
接收到的信号可以通过外部中断的方式触发单片机的中断服务程序。
然后,在中断服务程序中,单片机需要根据红外协议的规则,判断引导码、地址码和指令码的时间长度。
利用计时器或延时函数可以实现对信号时间的测量。
单片机红外接收与解码原理
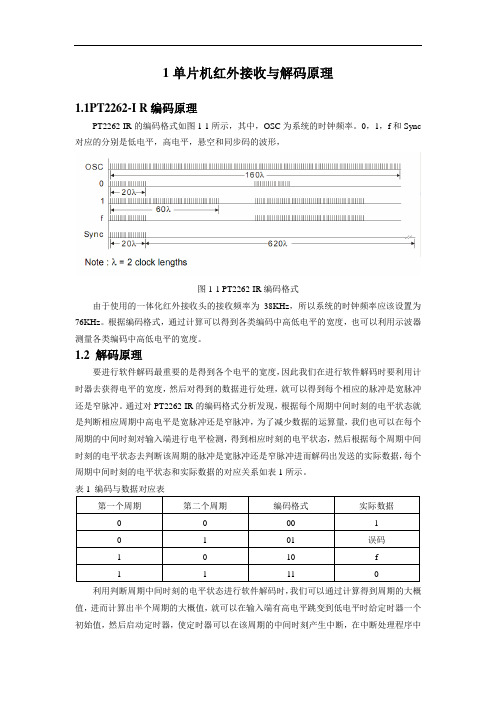
1单片机红外接收与解码原理1.1PT2262-I R编码原理PT2262-IR的编码格式如图1-1所示,其中,OSC为系统的时钟频率。
0,1,f和Sync 对应的分别是低电平,高电平,悬空和同步码的波形,图1-1 PT2262-IR编码格式由于使用的一体化红外接收头的接收频率为38KHz,所以系统的时钟频率应该设置为76KHz。
根据编码格式,通过计算可以得到各类编码中高低电平的宽度,也可以利用示波器测量各类编码中高低电平的宽度。
1.2 解码原理要进行软件解码最重要的是得到各个电平的宽度,因此我们在进行软件解码时要利用计时器去获得电平的宽度,然后对得到的数据进行处理,就可以得到每个相应的脉冲是宽脉冲还是窄脉冲。
通过对PT2262-IR的编码格式分析发现,根据每个周期中间时刻的电平状态就是判断相应周期中高电平是宽脉冲还是窄脉冲,为了减少数据的运算量,我们也可以在每个周期的中间时刻对输入端进行电平检测,得到相应时刻的电平状态,然后根据每个周期中间时刻的电平状态去判断该周期的脉冲是宽脉冲还是窄脉冲进而解码出发送的实际数据,每个周期中间时刻的电平状态和实际数据的对应关系如表1所示。
表1 编码与数据对应表第一个周期第二个周期编码格式实际数据0 0 00 10 1 01 误码1 0 10 f1 1 11 0利用判断周期中间时刻的电平状态进行软件解码时,我们可以通过计算得到周期的大概值,进而计算出半个周期的大概值,就可以在输入端有高电平跳变到低电平时给定时器一个初始值,然后启动定时器,使定时器可以在该周期的中间时刻产生中断,在中断处理程序中根据标记位判断是否需要读取信号输入端的电平状态,如果需要读取输入端的电平状态就开始读取输入端的电平状态,然后将其保存,同时计数值增加1,并清除标记位,对定时器设定初始值后重新启动定时器,以便判断该周期是否过长。
如果不需要读取电平状态说明此次定时是为了判断周期长度的,一旦进入该中断说明该周期过长,可能是同步位或者是误码,因此就需要将计数值清零,重新获取数据,一直到获取25个数据为止。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
bit DeCode(void) { unsigned char i,j; unsigned char temp; // 储存解码出的数据 for(i=0;i<4;i++) //连续读取4个用户码和键数据码 { for(j=0;j<8;j++) //每个码有8位数字 { temp=temp>>1; //temp 中的各数据位右移一位,因为先读出的是高位数据 TH0=0; // 定时器清0 TL0=0; // 定时器清0 TR0=1; // 开启定时器T0 while(IR==0) // 如果是低电平就等待 ; //低电平计时 TR0=0; // 关闭定时器T0 *256+TL0; //保存低电平宽度 LowTime=TH0 LowTime=TH0* TH0=0; // 定时器清0 TL0=0; // 定时器清0 TR0=1; // 开启定时器T0 while(IR==1) //如果是高电平就等待 ; TR0=0; // 关闭定时器T0 *256+TL0; //保存高电平宽度 HighTime=TH0 HighTime=TH0* if((LowTime<370)||(LowTime>640)) return 0; // 如果低电平长度不在合理范围,则认为出错,停止解码 if((HighTime>420)&&(HighTime<620)) //如果高电平时间在 560微秒左右,即计数 560/1.085=516次 temp=temp&0x7f; //(520-100=420, 520+100=620),则该位是 0 if((HighTime>1300)&&(HighTime<1800)) //如果高电平时间在 1680微秒左右,即计数 1680/1.085=1548次 temp=temp|0x80; //(1550-250=1300,1550+250=1800),则该位是1 } a[i]=temp; //将解码出的字节值储存在 a[i] } if(a[2]=~a[3]) //验证键数据码和其反码是否相等 ,一般情况下不必验证用户码 return 1; // 解码正确,返回 1 }
接收器及解码
一体化红外线接收器是一种集红外线接收和放大 于一体,不需要任何外接元件,就能完成从红外 线接收到输出与TTL电平信号兼容的所有工作, 而体积和普通的塑封三极管大小一样,它适合于 各种红外线遥控和红外线数据传输。
图中3个引脚从左到右 依次是 1 信号输出 2 地线(GND) 3 电源 (+5V)
上述“0”和“1”组成的32位二进制码经38kHz的载频进行二次 调制以提高发射效率,达到降低电源功耗的目的。 然后再通过红外发射二码是连续的32位二进制码组,其中前16位为用户识别码,能 区别不同的电器设备,防止不同机种遥控码互相干扰。芯片厂商把用户识别码固定为十六 进制的一组数;后16位为8位操作码(功能码)及其反码。UPD6121G最多额128种不 同组合的编码。遥控器在按键按下后,周期性地发出同一种32位二进制码,周期约为 108ms。一组码本身的持续时间随它包含的二进制“0”和“1”的个数不同而不同,大约在 45~63ms之间,图4为发射波形图。当一个键按下超过36ms,振荡器使芯片激活,将 发射一组108ms的编码脉冲, 这108ms发射代码由一个起始码(9ms),一个结果码(4.5ms),低8位地址码 (9ms~18ms),高8位地址码(9ms~18ms),8位数据码(9ms~18ms)和这8位数 据的反码(9ms~18ms)组成。如果键按下超过108ms仍未松开,接下来发射的代码 (连发代码)将仅由起始码(9ms)和结束码(2.5ms)组成。
锐志开发板上红外接收头连接图
�
红外接收头将38K载波信号过虑,得到与发射代码反向接收代码
发射端的“0”和“1”
红外解码的关键就是识别 0和1
1. 解码的关键是如何识别“0”和“1”, 从位的定义我们可以发现“0”、“1”均以0.56ms的低电平开始, 不同的是高电平的宽度不同,“0”为0.56ms,“1”为1.68ms,所以必须根据高电平的宽度 区别“0”和“1”。如果从0.56ms低电平过后,开始延时,0.56ms以后,若读到的电平为低, 说明该位为“0”,反之则为“1”,为了可靠起见,延时必须比0.56ms长些, 但又不能超过1.12ms,否则如果该位为“0”,读到的已是下一位的高电平, 因此取(1.12ms+0.56ms )/2=0.84ms最为可靠,一般取0.84ms左右均可。 2. 根据码的格式,应该等待9ms的起始码和4.5ms的结果码完成后才能读码。
�
�
1 红外遥控系统
通用红外遥控系统由发射和接收两大部分组成,应用编 /解码专用集 成电路芯片来进行控制操作,如图 1所示。发射部分包括键盘矩阵、 编码调制、LED红外发送器;接收部分包括光、电转换放大器、解调、 解码电路。
� �
�
遥控发射器及其编码 遥控发射器专用芯片很多,根据编码格式可以分成两大类,这里我们以运用比较广 泛,解码比较容易的一类来加以说明,现以兼容NEC的uPD6121G芯片发射码格式 的芯片组成发射电路为例说明编码原理。当发射器按键按下后,即有遥控码发出,所 按的键不同遥控编码也不同。这种遥控码具有以下特征: 采用脉宽调制的串行码,以脉宽为0.565ms、间隔0.56ms、周期为1.125ms的组 合表示二进制的“0”;以脉宽为0.565ms、间隔1.685ms、周期为2.25ms的组合表 示二进制的“1”,其波形如图2所示。
红外线遥控
红外线遥控
�
红外线遥控是目前使用最广泛的一种通信 和遥控手段。由于红外线遥控装置具有体 积小、功耗低、功能强、成本低等特点, 因而,继彩电、录像机之后,在录音机、 音响设备、空凋机以及玩具等其它小型电 器装置上也纷纷采用红外线遥控。工业设 备中,在高压、辐射、有毒气体、粉尘等 环境下,采用红外线遥控不仅完全可靠而 且能有效地隔离电气干扰。
检测9MS的引导码
IT0=1; //外中断的下降沿触发 void Int0(void) interrupt 0 { EX0=0; //关闭外中断 0,不再接收二次红外信号的中断,只解码当前红外信号 TH0=0; // 定时器T0的高8位清0 TL0=0; // 定时器T0的低8位清0 TR0=1; //开启定时器T0 while(IR==0); // 如果是低电平就等待,给引导码低电平计时 TR0=0; // 关闭定时器T0 LowTime=TH0 LowTime=TH0* *256+TL0; //保存低电平时间 TH0=0; // 定时器T0的高8位清0 TL0=0; // 定时器T0的低8位清0 TR0=1; //开启定时器T0 while(IR==1); //如果是高电平就等待,给引导码高电平计时 TR0=0; // 关闭定时器T0 HighTime=TH0 HighTime=TH0* *256+TL0; //保存引导码的高电平长度 if((LowTime>7800)&&(LowTime<8800)&&(HighTime>3600)&&(HighTime<4700)) { //如果是引导码 ,就开始解码 ,否则放弃,引导码的低电平计时 //次数=9000us/1.085=8294, 判断区间:8300-500=7800,8300+500=8800. //如果是引导码 ,就开始解码 ,否则放弃,引导码的低电平计时 //次数=9000us/1.085=8294, 判断区间:8300-500=7800,8300+500=8800. if(DeCode()==1) // 执行遥控解码功能