英飞凌单片机例程tc1767_taskingv33r2_dcm_ltc
英飞凌单片机例程tc1767_taskingv33r2_flash

Page 11
Exercise MEM_1 – Tasking Viper Reflash Project
Refresh files in the project Right click on „MEM_1‟ in the navigator
Select „Refresh‟ from the pull down menu
confidential
Page 5
Exercise MEM_1 Dave Configuration(cont.)
Save (File Save) this DAvE file in : d:\hot\tc1767\MEM_1\MEM_1.dav Let DAvE now generate the code for you Go to File Generate Code or click: DAvE opens a new window with the Project Documentation file. On the left hand side a browser window shows the generated files. You can take a look at the generated code or just find out in which file DAvE put the included functions. In general:
Programming the internal flash Exercise MEM_1
Exercise MEM_1 Objective
Objective: Pregram the internal Flash Run the code from here: on board LED will blink.
英飞凌 tricore TC297 用户手册 中文版
英飞凌tricore TC297 用户手册中文版简介1。
简介本用户手册描述了TC1728,一种基于英飞凌TriCore架构的新型32位微控制器DSP。
该文档涵盖了不同封装的TC1728和TC1724的特性。
1。
1关于本手册本用户手册的主要读者定位为设计工程师和软件工程师.手册对TC1728的功能单元、相关寄存器、相关指令及异常情况处理进行了详细描述。
TC1728微控制器用户手册所描述的TC1728特性和TriCore架构紧密相关.若TC1728直接实现了TriCore架构功能,手册中将其简称为TC1728特性。
手册在描述TC1728特性时若不提及TriCore架构,即表明TC1728直接实现了TriCore架构功能;若TC1728实现的特性是TriCore架构特性的子集,手册会在说明TC1728具体实现的同时指出它与TriCore 架构的差别。
这些差别会在相关章节中予以说明.1.1.1相关文档TriCore架构的详尽描述可参见文档“TriCore架构手册"。
由于TriCore具有可配置性,不同版本的架构包括的系统组成可能因此不同,因此有必要对TC1728架构进行单独说明.本用户手册和“Tr iCore架构手册”一起有助于用户完全理解TC1728微控制器的功能。
1。
1.2………命名规则本手册使用下面的规则来命名TC1728的组成单元:TC1728的功能单元用大写表示.例如:“SSC支持全双工和半双工同步通信".低电平有效的引脚,符号上方加横杠表示。
例如:“,具有双重功能”。
寄存器中的位域和位通常表示为“模块_寄存器名称・位域"或“模块_寄存器名称・位"。
例如大多数寄存器名包括模块名前缀,用下划线“_”和真正的寄存器名分开(例如“ASCO_CON”中“ASCO”是模块名前缀,“CON”是内核寄存器名)。
在描述外设模块的内核时,通常引用内核寄存器名;在描述外设模块的实现时,通常引用外带有模块前缀的寄存器名.用户手册简介,V1.01-1V1.0,2011—12简介…变量出现在大小写混用中,用来表示一组处理单元或寄存器。
英飞凌单片机例程tc1767_taskingv33r2_spram

Note: DAvE doesn‟t change code that is inserted in the „USER CODE‟ sections if you let DAvE regenerate code. Therefore, whenever adding code to the generated code, write it into a „USER CODE‟ section. If you want to change DAvE generated code or add code outside these „USER CODE‟ sections you have to modify your changes after each time you let DAvE regenerate code!
confidential
Page 15
Exercise MEM_2 Tasking Viper : Change Link script file
Select MEM_2.lsl file and unlock the Memory Change the ROM setting
Change the type of SPRAM to ROM
confidential
Page 6
Exercise MEM_2 Tasking Viper : Start Viper
Start TASKING VX-toolset for tricore Click on Open Project Work Space Filename: browse to “d:\hot\tc1767” Click „OK‟
1
confidential
英飞凌tricore用户手册 第24章 捕捉比较单元CCU6
MCMOUTS 多通道模式输 8CH 出影子寄存器
U, SV U, SV 0000 0000H 类3 U, SV U, SV 0000 0000H 类3 U, SV U, SV 0000 0000H 类3 U, SV U, SV 0000 0000H 类3
24-85 24-87 24-90 24-94
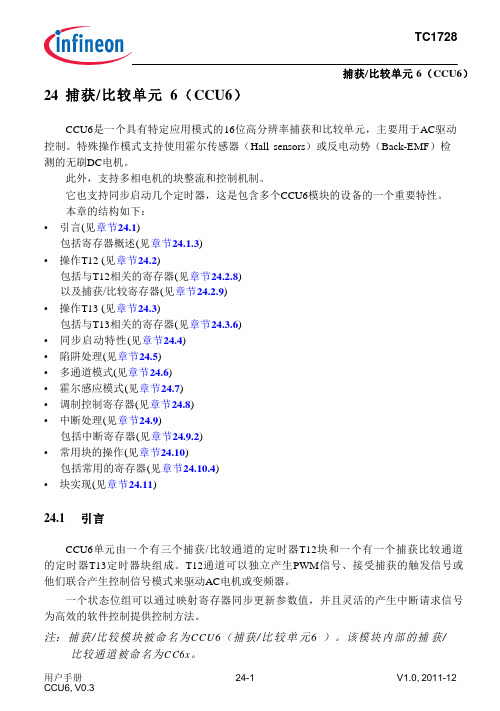
注: 捕 获 /比 较模 块被 命 名 为 CCU6( 捕获 /比较单元6 )。 该 模 块 内部 的捕 获/ 比较通道被命名为C C6x。
用户手册 CCU6, V0.3
24-1
V1.0, 2011-12
TC1728
24.1.1 功能集概述 本节在不同的块构建及其主要功能上给予概述。
捕获/比较单元 6(CCU6)
位寄存器
复位 类3 类3 类3
页码 24-100 24-103 24-105
INP
中断节点指针 ACH U, SV U, SV 0000 3940H 类3
24-110
寄存器
IEN
中断使能
B0H U, SV U, SV 0000 0000H 类3
24-107
寄存器
用户手册 CCU6, V0.3
24-9
U, SV U,SV 0000 0000H
复位 类3
页码 24-70
CC63SR
定时器T13 5CH 比较映射寄 存器
U, SV U, SV 0000 0000H 类3
24-71
调制控制寄存器
MODCTR 调制控制寄 80H 存器
TRPCTR PSLR
陷阱控制寄存 84H 器 无源状态电平 88H 寄存器
移量 读写
CC62SR
捕获/比较映射 48H 寄存器通道
英飞凌单片机例程tc1767_taskingv34r1_can_1
Exercise CAN_1 DAvE Configurations (cont.)
Configure ASC0 (cont.) Pin selection / ASC0_RX and ASC0_TX:
Use Pin P3.0 as ASC0 receive signal. Use Pin P3.1 as ASC0 transmit signal.
Click here
confidential
Page 8
Exercise CAN_1 DAvE Configurations (cont.)
Configure ASC0 Module Clock:
Enable ASC0 module. Module clock: 40MHz.
confidential
Project Settings (cont.) MultiCAN / List
Drag MO 000 to Node 0 Drag M2 000 to Node 1
Drag from list on left
confidential
Page 26
Exercise CAN_1 DAvE Configurations (cont.)
confidercise CAN_1 DAvE Configurations (cont.)
Configure ASC0 (cont.) Baud Rate :
Required Baud rate: 19200 Baud.
confidential
Page 13
Exercise CAN_1 DAvE Configurations (cont.)
Configure ASC0 (cont.) Interrupts :
英飞凌单片机例程tc1767_taskingv33r2_introduction

Note : You may have to reboot your computer at the end of the installation.
Note: the Infineon DAS servers are automatically installed together with Tasking‟s tool chain.
Context Sensitive Help provides complete command syntax and detailed description with hypertext links to the user manual.
More information is available at
For internal use only Page 5
Introduction to the Tasking Viper for Tricore
Assembler: The BSO/TASKING assembler is an integral part of the tool set but delivers features that enable it to be used on its own. It is supplied complete with linker/locator, librarian and object format utilities. Linker/Locator: The linker and locator is an essential part of the software building process that enables you to link and locate modules in target memory. More information is available at
英飞凌单片机例程tc1767_taskingv33r2_pwm_ltc
confidential
Page 17
Exercise GPTA_LTC_PWM DAvE Configurations (cont.)
GPTA0 Local Timer Cell /LTC4/LTC4:
Enable LTC4 after initialization. Mode: Compare with Last Timer. LTC4 register value : 0x05DB. Reset the LTC4 output by a local event or copy previous cell action. LTC4mode control: Enable high level of „Select Line Input‟.
Page 19
Exercise GPTA_LTC_PWM DAvE Configurations (cont.)
GPTA0 Output Pins:
Click on “OUT1”.
confidential
Page 20
Exercise GPTA_LTC_PWM DAvE Configurations (cont.)
confidential
Page 4
Exercise GPTA_LTC_PWM PWM Signal Update (Coherent)
Timer
0 Compare_0(Period) 0 1 Compare_1(Period) 0 1
Reset timer
-1
Compare_0(Duty) Compare_1(Duty)
Select “GPTA0_vInit”.
confidential
Page 22
Infineon(英飞凌)单片机教案PPT

CAN接口电路
CAN接口芯片
CAN总线
“Controller Area Network”,即控制器局 域网,是国际上应用最广泛的现场总线之 一。 一个由CAN 总线构成的单一网络中,理论 上可以挂接无数个节点 实际上同一网络中最多可挂接110个节点 通常电压值为:CAN_H = 3.5V 和CAN_L = 1.5V 。
XC167CI实验板功能模块介绍
XC167-CI实验板
XC167CI简装开发板的特点
英飞凌系列的XC167CI采用的是TQFP144 的封装形式 板上的双重电源可以为XC167CI提供5V伏 / 2点6伏的电压。 高速的CAN收发器,LIN 收发器,EPROM, URAT(RS232串口) 8位低功耗的LED
数据存储区地址映射
程序存储区
XC167中有两个片上程序存储区,用于代码/数据存储 256KB程序FLASH/ROM,C0’0000H…C3’FFFFH存 储代码和常量数据。FLASH可以通过软件(反复) 编程,ROM只能在工厂掩模编程 6KB程序SRAM(PSRAM)E0’0000H…E0’17FFH 存储临时代码和其它数据,比如高级引导加载程序 可写在PRAM中,继而执行该程序对片上存储器进 行编程
微型计算机的组成框图 (由多个IC芯片组装在一个主电路板上)
所有单元都组装 在一个IC芯片上
Infineon单片机分类
根据每种型号的存储器的类型分类
无ROM型:C167CR-LM ROM型 :C167CR-16RM OTP型 :C164CI-8EM FLASH型 :XC167CI-32F
第二部分:XC167CI实验板简介
英飞凌tricore用户手册 第16章 片上调试支持 OCDS
片上调试支持(OCDS)16片上调试支持本章概述了有关TC1728的调试功能。
这一章不详细介绍TC1728的调试功能和方法。
有关片上调试支持(OCDS)功能(如需工具供应商提供)的详细信息请联系当地的英飞凌代表。
16.1概览TC1728支持OCDS级别1和OCDS级别3。
∙OCDS级别1OCDS级别1主要用于系统软件调试的目的,其需要低成本标准调试硬件。
OCDS级别1基于一种调试接口,其用于通过外部的调试硬件与系统进行通信。
片上Cerberus模块控制调试接口与芯片模块之间相互作用,并特别允许访问设备的整个地址空间。
内存映射的片上调试资源使其可能由指令和数据地址触发以及控制用户程序执行(运行/停止、断点,单步执行)。
∙OCDS级别3OCDS级别3基于使用仿真设备的多核调试解决方案(MCDS)。
此设备具有达到高端仿真的目的所需的以下功能:∙仿真设备在具有和TC1728相同封装的产品系列里可用∙跟踪和重叠RAM引起的高电流消耗是唯一的差别∙Tricore程序跟踪∙Tricore数据跟踪(无寄存器文件跟踪)∙PCP所有权追踪∙PCP程序跟踪∙PCP数据写入PRAM跟踪(无寄存器文件跟踪)∙内部外设总线(SPB)的完全可视性∙本地存储器总线(LMB)的完全可视性∙所有资源的时间对齐平行追踪∙基于普通事件产生逻辑的断点和观察点∙工作在指令指针和存储器地址的比较器:A<=IP<=B∙工作在数据总线上的屏蔽比较器:DATA=“xxxx55xx”∙顺序事件逻辑:由事件驱动并带有界限比较器的计数器被用作断点和追踪质量的事件源∙缓冲追踪数据的优化压缩∙从仿真内存读取代码和数据片上调试支持(OCDS)∙高精度复杂的资格-和触发机制∙事件前和事件后追踪缓冲(“数字示波器”)∙行为计数器∙可进行高达主机接口带宽的持续追踪记录和追踪数据采集∙中间时间戳单元关联从不同的内核或来源的追踪∙同时或有选择性的启动和停止所有内核的中央机制∙追踪内存已满时停止系统仿真设备包括使用额外的仿真硬件扩展的产品芯片部分。
英飞凌单片机例程tc1767_taskingv33r2_asc_bootstrap

Exercise MEM_3 Objective
Objective: Reflash the internal Flash Memory by ASC bootloader. Run the code from here: on board LED will blink.
PC
USB
confidential
Page 3
Exercise MEM_3 Memtool : Target MCU Setting
Run Memtool.exe Select ‘Target’ and click ‘Change’ manu
confidential
Page 4
Exercise MEM_3 Memtool : Target MCU Setting(cont.)
d:\hot\tc1767\mem_1\mem_1.hex
The On Chip Flash is now programmed!
confidential
Page 9
Exercise MEM_3 Hardware : Restore to the internal start mode
Powre off TriBoard and reset the configuration
confidential
Page 11
confidential
Page 5
Exercise MEM_3 Memtool : Target MCU Setting(cont.)
Setup the configure in Memtool Click ‘Finish’ button Save the configuration file to default location
英飞凌tricore用户手册 第13章 中断系统INT
13中断系统TC1728中断系统可灵活、实时的处理中断请求。
本章描述TC1728的中断系统,包括中断系统架构、中断系统配置、以及TC1728外设和中央处理单元(CPU)的中断操作。
本章还给出外设控制处理器(PCP)的基本信息。
13.1概述可由CPU或PCP服务中断请求。
在本手册中,提及中断请求时不使用术语“中断请求”、而使用术语“服务请求”,因为他们可以被其中任意一种处理器服务。
TC1728的每个外设都可以产生服务请求。
另外,总线控制单元、调试单元、PCP以及CPU本身都可以产生服务请求,发送至CPU或PCP处理器。
如图13-1所示,每个能产生服务请求的TC1728单元都与一个或多个服务请求节点(SRN)相连。
每个SRN具有一个服务请求控制寄存器mod_SRCx,其中“mod”代表服务请求单元的ID(标识符),x为可选编号。
两条仲裁总线将SRN和两个中断控制单元(ICU)相连(由ICU对竞争的中断服务请求进行中断仲裁):•中断控制单元(ICU)仲裁发送给CPU的服务请求并管理CPU中断仲裁总线。
•外设中断控制单元(PICU)仲裁发送给PCP的服务请求并管理PCP中断仲裁总线。
PCP能够直接向其自身发送服务请求(通过PICU),或向CPU发送服务请求。
调试单元可向PCP或CPU发送服务请求。
CPU也能够向其自身发送服务请求(通过ICU),或向PCP发送服务请求。
可由软件激活CPU服务请求节点。
图13-1TC1728中断系统框图SET R CLRRSRR SRE0TOS0SRPN13.2服务请求节点每个SRN具有一个服务请求控制寄存器和接口逻辑(通过接口逻辑将SRN和触发单元以及两条中断仲裁总线相连)。
TC1728一些外设单元具有多个SRN。
13.2.1服务请求控制寄存器TC1728中的所有服务请求控制寄存器具有相同的格式。
这些寄存器通常包含:•使能/禁止信息•优先级信息•中断服务处理器(PCP或CPU)•选择服务请求状态位•软件控制的服务请求置位和清零位除了通过相关触发单元硬件激活之外,每个SRN还可通过软件控制的服务请求由软件置位或复位。
英飞凌编程工具的使用 (1)
开发工具的使用英飞凌XC800系列单片机写在前面本篇内容为英飞凌科技有限公司(Infineon Technologies CO., LTD.)的XC800系列单片机的基础篇之一。
如无特别说明,所指的产品为XC800系列单片机中的首款型号:XC866。
由于后续芯片会有更多的改进/增加措施,如需要关注其它产品,需要再结合相应的产品数据手册(Data Sheet)和用户手册(User Manual)! 由于版本更新等原因,可能会出现各版本间的资料说法有略微差异,请以英飞凌网站公布的最新英文版本的产品数据手册(Data Sheet)和用户手册(User Manual)为准!内容英飞凌8位单片机硬件的连接基本的硬件连接方式DAvE的安装与使用DAvE软件用于配制项目文件,设置端口,定时器工作方式等 Keil软件的安装与使用Keil软件编辑(插入)用户代码实现用户目标功能编译源文件,生成目标代码软件仿真下载工具的安装与使用FLOAD软件下载程序到目标芯片MEMTOOL软件下载程序到目标芯片硬件的连接XC866评估板(Starter Kit)结构图:直流:8~18V/300mA硬件连接连接步骤将串口和电脑串口连接连接电源。
当连接好电源时,电源指示灯点亮OCDS接口的连接XC866使用16针的标准JTAG接口。
信号排列如下:JTAG 接信号线定义:接地信号线GNDOCDS 配置(XC800中不使用)OCDSE保留(留作特殊应用时使用)RCAP1/2电源VCC测试系统复位信号TRST目标系统复位信号RESET测试时钟TCK测试机时钟CPU_CLOCK测试数据串行输入TDI测试数据串行输出TDO测试模式选择TMS在连接OCDS调试接口时,需要注意,应该将箭头端连接到开发板上针脚1处。
使用OCDS调试接口,同样能够下载程序到单片机,不一定需要通过串口下载程序到目标机,再进行调试。
为了方便学习,下面介绍一个程序的基本流程。
英飞凌平台工具使用方法
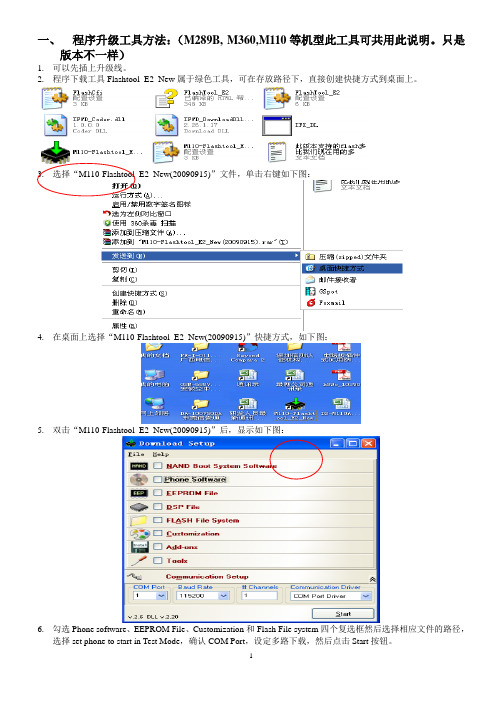
一、程序升级工具方法:(M289B, M360,M110等机型此工具可共用此说明。
只是版本不一样)1.可以先插上升级线。
2.程序下载工具Flashtool_E2_New属于绿色工具,可在存放路径下,直接创建快捷方式到桌面上。
3.选择“M110-Flashtool_E2_New(20090915)”文件,单击右键如下图:4.在桌面上选择“M110-Flashtool_E2_New(20090915)”快捷方式,如下图:5.双击“M110-Flashtool_E2_New(20090915)”后,显示如下图:6.勾选Phone software、EEPROM File、Customization和Flash File system四个复选框然后选择相应文件的路径,选择set phone to start in Test Mode,确认COM Port,设定多路下载,然后点击Start按钮。
特别注意事项:一般情况下,不要去勾选“EEPROM File”选项,否则会清除RF射频校准参数、ADC电池校准参数、音频参数、显示驱动等。
只有在第一次把程序下载到PCBA板上时,才需要勾选此项,此项请慎重选择。
选择文件的时候此三后缀文件:M289B_B10V03.cust M289B_B10V03.fls M289B_B10V03.fls一定要选择,否则升级不成功,或则升级软件版本不对。
一般最多8个端口,否则可能不稳定一般最多8个端口,否则可能不稳定8.当download成功后,会出现如图所示的画面。
取出PCBA或手机,重新放入另外的PCBA或手机,按同样的方法下载。
9.以上状态,表示升级成功。
二、整机电流测试(一)电流测试工具软件的安装1.双击CurrentTestSystem.exe进行测试程序的安装。
2.接着显示如下图,连续3次按“NEXT”按钮,(建议选择默认的安装路径,否则造成使用可能出问题题)。
3.接着显示如下图,再点击“Finish”,表示安装完成。
英飞凌tricore用户手册 第14章 系统定时器STM
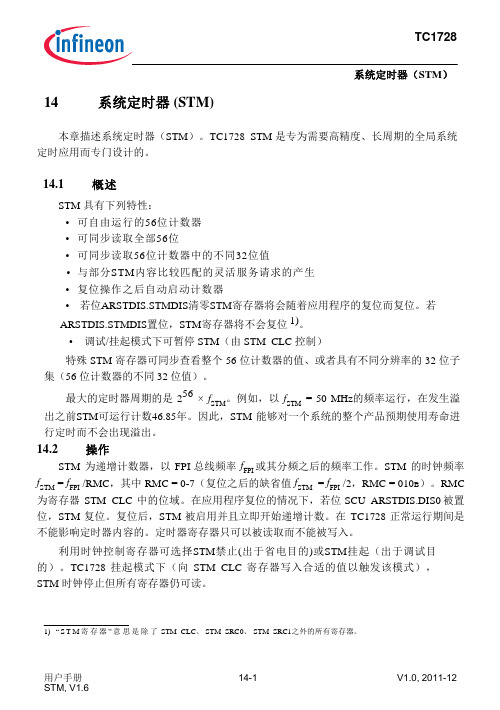
用户手册 STM, V1.6
14-2
V1.0, 2011-12
TC1728 系统定时器(STM)
图 14-1 S T M 模 块 寄 存 器 通 用 框 架 图
用户手册 STM, V1.6
14-3
V1.0, 2011-12
TC1728
14.2.1 精度和定时范围
系统定时器(STM)
表 14-1 给出各定时器寄存器的精度和定时范围,表中以75MHz STM输入时钟频率 fSTM的值为例。
用户手册 STM, V1.6
14-8
V1.0, 2011-12
TC1728
系统定时器(STM) 14.3.1 时钟控制寄存器
STM 时钟控制寄存器可控制开启/关闭 STM 并控制输入时钟频率。上电复位之后,始 终使能 STM 开始计数。位 DISR 置 1 可禁止 STM 运行。
STM_CLC STM 时钟控制寄存器
V1.0, 2011-12
TC1728
系统定时器(STM) 非零的 MSIZE 的比较操作始终表明将保存在 CMP 寄存器中的比较值进行向右零扩展。 这意味着图 14-2 的例中,比较寄存器的内容 STM_CMP0[17:0]加上 9 位向右零扩展值与 STM[27:0]进行比较(STM[8:0] = 000 H );对于寄存器 STM_CMP1,STM[14:0](其中 STM[5:0] = 00 H )与 STM_CMP1[8:0]加上 6 位向右零扩展值进行比较。 14.2.3 比较匹配中断控制 图 14-3 给出比较匹配中断控制的逻辑电路。每个 STM_CMPx 寄存器具有比较匹配中 断请求标志(STM_ICR.CMPxIR),该标志可在发生比较匹配事件时进行硬件置位。软件 也可置位(由 STM_ISSR.CMPxIRS)或清零(由 STM_ISSR.CMPxIRR)中断请求标志。 需要注意:通过设置 STM_ISSR.CMPxIRS = 1 来置位 STM_ICR.CMPxIR 不会在 STMIRx 上 产生中断。来自 CMP0 和 CMP1 的匹配中断还可进一步经由 STM_ICR.CMPxOS 连至输出 信号 STMIR0 或 STMIR1。STMIR0 和 STMIR1 输出信号分别连接到中断服务请求控制寄存 器 STM_SRC0 和 STM_SRC1。
英飞凌TC3XX系列多核MCU学习笔记(1)
英飞凌TC3XX系列多核MCU学习笔记(1)AURIX TC3XX GPIO-(LED)实验声明:本文是在学习英飞凌TC3XX系列多核(MCU)过程中整理的笔记,便于后期复习!1、GPIO特征控制最多16条(端口);通过软件能够控制每个端口的输出;输出修改(寄存器)易于清除、设置和切换单个端口线和端口线的微调,而不影响其他端口的状态;通过软件可以读取每个端口行的输入值;每个输出最多可提供7个复用函数;支持每个端口的直接I/O控制;控制指定垫片的垫片特性,如驱动强度、转换速率、上/下拉、推/拉或开漏操作,以及TTL或CMOS/汽车输入电平的选择;紧急停止功能允许通过SMU或特殊端口引脚关闭可配置端口线的输出(驱动器);对于具有LVDS功能的pad对,它控制LVDS特性,并允许在LVDS 和CMOS模式之间切换;在减少引脚数的包中,端口模块可以禁用选定的引脚。
2、GPIO 模式TC3XX系列(芯片)GPIO共有五种模式NO_PULL, //无输入上下拉PULLUP, //输入上拉PUL(LDO)WN, //输入下拉PUSHPULL, //推挽输出OPENDRAIN, //开漏输出3、GPIO 通用寄存器3.1、IOCR0-端口n输入/输出控制寄存器0 寄存器作用:端口输入/输出控制寄存器选择一个GPIO端口引脚的数字输出和输入驱动程序的功能和特性。
输入的端口方向(输入或输出)、上拉、下拉或无拉设备,以及输出的推拉或开漏功能,可由相应的位字段PCx(x=0-15)选择。
每个32位宽端口输入/输出控制寄存器控制四条GPIO端口线:寄存器Pn_IOCR0控制Pn [3:0]端口线路;寄存器Pn_IOCR4控制Pn [7:4]端口线路;寄存器Pn_IOCR8控制Pn [11:8]端口线路;寄存器Pn_IOCR12控制Pn [15:12]端口线路。
3.2、OMR-端口n输出修改寄存器3.3、PDR0-端口n驱动程序模式寄存器04、GPIO 函数4.1、设置GPIO 状态函数1void IfxPort_set(Pi)nState(Ifx_P *port, uint8 pinIndex, IfxPort_State (ac)(ti)on)2{3 port- >OMR.U = action (参数):port:GPIO 端口号pinIndex:高低电平4.2、设置GPIO输出模式1void IfxPort_setGroupModeOutput(Ifx_P *port, uint8 pinIndex, uint16 mask, IfxPort_OutputMode mode, IfxPort_OutputIdx index) 2{ 3 uint32 i; 4 uint32 iocrVal[4]; 5 uint32 iocrMask[4]; 6 7 IFX_UNUSED_PA(RAM)ETER(index == IfxPort_OutputIdx_general); 8 9/* initialise */10 f(or)(i = 0; i 2、设置GPIO输出高电平1void IfxPort_setPinHigh(Ifx_P *port, uint8 pinIndex)2{3 IfxPort_setPinState(port, pinIndex, IfxPort_State_high);4} port:GPIO端口号pinIndex:1-高电平、0-低电平3、设置GPIO输出低电平1void IfxPort_setPinLow(Ifx_P *port, uint8 pinIndex)2{3 IfxPort_setPinState(port, pinIndex, IfxPort_State_low);4} port:GPIO端口号pinIndex:1-高电平、0-低电平4、设置GPIO翻转电平1void IfxPort_togglePin(Ifx_P *port, uint8 pinIndex)2{3 IfxPort_setPinState(port, pinIndex, IfxPort_State_toggled);4} port:GPIO端口号pinIndex:1-高电平、0-低电平5、读取GPIO电平1boolean IfxPort_getPinState(Ifx_P *port, uint8 pinIndex)2{3 return (__getbit(4} port:GPIO端口号pinIndex:1-高电平、0-低电平5、GPIO 测试实验使用逐飞TC377系列核心板,板上有4路LED,原理图如下:实验:实现点灯,熟悉GPIO使用。
英飞凌16位单片机2287-DAVE演示文档-CAN
CAN_2
Init Main • fsys=80MHz • Init USIC
Init MultiCAN • Module • Node 0 • Node 1 • Message Objects • Start nodes
Page 15
HOT Exercise CAN_1 - DAvE Configurations A MultiCAN settings
Configure CAN Node 1 Baud Rate: ¬ Required baud rate : 500 Kbaud ¬ TSeg2 : 5 to get Real baud rate at 500 Kbaud
Configure the XC2000 with DAvE Configure USIC 0 Channel 0 as a UART Receive a character from a PC and generate a receive interrupt Transmit the character on CAN node 0 and receive the CAN message on CAN node 1 Transmit the value back to the PC and toggle one of the LEDs on the board on receipt of every character
Configure CAN Node 1 General:
¬ Select P2.4 for Receive Input and P2.2 for Transmit Output
英飞凌单片机例程tc1767_taskingv33r2_pwm_ltc
confidential
Page 4
Exercise GPTA_LTC_PWM PWM Signal Update (Coherent)
Timer
0 Compare_0(Period) 0 1 Compare_1(Period) 0 1
Reset timer-1源自Compare_0(Duty) Compare_1(Duty)
?tricoreprojectsettingsclickaudofuturefamilyselecttc1767startupcodelinkerscriptfilesynchronizaqtionfilepage33confidential?refreshfilesrightclickselect?refresh?frompulldownmenuprojectexercisegptaltcpwmtaskingviperreflashproject?createdave?mainc?mainh?asc0c?asc0h?gpta0c?gpta0h?ioc?iohpage34confidential?settargetboardconfigurationselect?infineoneasykittc1767?select?dasoveronboardusbwiggler?select?singlechip?select?tc1767?disableupdatestartupcodeexercisegptaltcpwmtaskingvipersettingprojectpropertypage35confidential?setprojectpropertiesclick?setting?disable?automaticinclusion?sfr?file?exercisegptaltcpwmtaskingviper
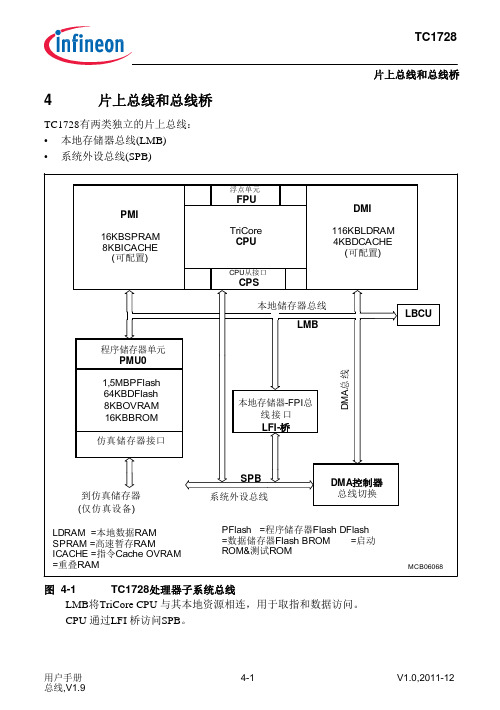
英飞凌tricore用户手册 第4章 片上总线和总线桥
请求/授权
地址周期
数据周 期
MCA06109
图 4-2 基 本 L M B 传 送
传送1由三个周期组成,任何LMB传送均由这三个周期组成:
1. 请求/授权周期:LMB主设备准备执行读或写传送、请求LMB。若LMB可用,在 同一个周期内LMB主设备获得LMB控制器授权。
2. 地址周期:在请求/授权周期之后,主设备将地址送至LMB,所有LMB从设备 检查是否自身被寻址。
图4-4
LMB 总线控制单元寄存器
注: 表4-4地址栏中“偏移地址”是word(32-位)型地址。
中断寄存器 L BCU _SR C
LBCU_reg_its
表4-3
LBCU –寄存器地址空间
模块
起始地址
结束地址
注
LBCU
F87F FE00H
F87F FEFFH
表4-4 缩略名
LBCU_ID
LBCU 模块控制寄存器概览
用户手册 总线,V1.9
4-7
V1.0,2011-12
TC1728
片上总线和总线桥 4.3.4 LMB总线控制单元寄存器
图4-4和表4-4说明了LMB总线控制单元寄存器(LBCU)模块的所有地址映射。
LBCU单元寄存器概览
ID寄存器 LBCU_ID
控制寄存器 LBCU_LEATT
地址/数据寄存 器
表4-2
主设备优先级
优先级
LMB主设备
注
最高
DMA,高优先级
来自模块的DMA请求: -Cerberus高优先级1) -DMA 通道高优先级2)
LFI桥
DMA,中等优先级 数据存储器接口(DMI)
来自模块的DMA请求: -DMA 通道中优先级2)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Create by Dave
Main.c Main.h Gpta0.c Gpta0.h Io.c Io.h
confidential
Page 28
Exercise GPTA_LTC_DCM Tasking Viper : Setting Target Board
Create Project name „GPTA_LTC_DCM ´ Select ‘Use default location’ Select ‘Empty project’ Click ‘Next’
Same name as DAvE directory
1
confidential
Page 26
Exercise GPTA_LTC_DCM Tasking Viper:Create New Project(cont.)
Page 27
Exercise GPTA_LTC_DCM Tasking Viper : Reflash Project
Refresh files in the project Right click on „GPTA_LTC_DCM‟ in the navigator
Select „Refresh‟ from the pull down menu
confidential
Page 22
Exercise GPTA_LTC_DCM Tasking Viper : Open a workspace
Start TASKING VX-toolset for tricore Click on Open Project Work Space Filename: browse to “d:\hot\tc1767” Click „OK‟
Tricore Project Settings Click “AUDO Future Family” and select “TC1767” Enable “C startup code”,”Linker script file” and “synchronizaqtion file”
confidential
Compiler Settings: Tasking Enable “Use Infineon DAvE sfr Header”
confidential
Page 5
Exercise GPTA_LTC_DCM DAvE Configurations(cont.)
Project Settings - opens automatically General:
if the included function is a macro it is included in the „.h‟ file if the included function is a function it is included in the „.c‟ file
File main.c,main.h,gpta0.c,gpta0.h,io.c and io.h will be generated
confidential
Page 7
Exercise GPTA_LTC_DCM DAvE Configurations (cont.)
GPTA Clock Module clock:
Enable GPTA Module Select normal divider mode Set the required module clock to 20MHz
Page 20
Exercise GPTA_LTC_DCM DAvE Configurations (cont.)
Ports Ports / Functions:
confidential
Page 21
Exercise GPTA_LTC_DCM DAvE Configurations (cont.)
LTC0 as a timer LTC1 as a capture mode (rising edge) LTC2 as a capture mode (falling edge)
Let’s get started now!
confidential
Page 2
Exercise GPTA_LTC_DCM Block diagram
confidential
Page 8
Exercise GPTA_LTC_DCM DAvE Configurations (cont.)
GPTA Clock Timer Clock Control:
Enable GPTA0 Timer clock.
confidential
Page 9
Exercise GPTA_LTC_DCM DAvE Configurations (cont.)
Software
P5.0
TC1767
Clock 4
Timer
Reset timer
P0.0
Capture(Rising) Capture(Falling)
confidential
Page 3
Exercise GPTA_LTC_DCM DAvE Configurations
Start DAvE for TC1767.
Create New Project Click on File New Select „Tasking VX-toolset for Tricore C/C++ Project‟
1
confidential
Page 25
Exercise GPTA_LTC_DCM Tasking Viper: Create New Project(cont.)
General Purpose Timer Array ExercLTC_DCM Objective
Using 3 Local Timer Cells (LTC), perform a duty cycle measurement by configuring
Set Target Board Configuration
Click on
Select „Infineon Easy Kit TC1767‟ Select „DAS over on-board USB wiggler‟ Select „Single Chip‟ and Select „TC1767‟ and Disable “Update Startup Code”
Save (File Save) this DAvE file in : d:\hot\tc1767\gpta_ltc_dcm\gpta_ltc_dcm.dav Let DAvE now generate the code for you Go to File Generate Code or click: DAvE opens a new window with the Project Documentation file. On the left hand side a browser window shows the generated files. You can take a look at the generated code or just find out in which file DAvE put the included functions. In general:
confidential
Page 13
Exercise GPTA_LTC_DCM DAvE Configurations (cont.)
GPTA0 Local Timer Cell /LTC0/Data Input:
Internal input: Select Clock 4.
confidential
Click on the GPTA0 module Select window: Clock Generation Click CDU button
confidential
Page 10
Exercise GPTA_LTC_DCM DAvE Configurations (cont.)
GPTA0 Clock Generation / CDU / Clock Bus 5-4:
confidential
Page 12
Exercise GPTA_LTC_DCM DAvE Configurations (cont.)
GPTA0 Local Timer Cell /LTC0/LTC0:
Enable LTC0 after initialization. Mode selection: Timer with reset from adjacent LTC with higher order. Connect the input line to LTC0. Enable rising edge of selected input signal
Page 14
Exercise GPTA_LTC_DCM DAvE Configurations (cont.)
GPTA0 Local Timer Cell /LTC1/LTC1:
confidential
Page 15
Exercise GPTA_LTC_DCM DAvE Configurations (cont.)
confidential
Page 23
Exercise GPTA_LTC_DCM Tasking Viper : Create New Project
Click on Workbench (if not already there…)